1. Introduction
The development of a worst-case control design for a linear plant subjected to unknown parameter uncertainties and disturbances has attracted the interest of the control community for many years. In [
1], within the context of sensitivity reduction, Zames introduces the
norm minimization to formulate the control design problem. The mixed-sensitivity approach, introduced in [
2,
3], is a general control design formulation where the
norm is used to define constraints on both the sensitivity and complementary sensitivity function. These constraints are defined by suitable weighting functions to ensure good performances and the robustness of the system to be controlled. The books [
4,
5] and the paper [
6] provide a deep discussion about the underlying theory and, starting from robustness and time-domain requirements, the way to suitably formulate the mixed-sensitivity control design problem.
Nominal
mixed-sensitivity control design problem can be solved through algorithms based on linear matrix inequalities (LMI) (see, e.g., [
7,
8]) or on the algebraic Riccati equation (see, e.g., [
9,
10]). Most of the
mixed-sensitivity control design approaches are developed for continuous-time systems, while a few approaches deal with the discrete-time systems. In [
11,
12], discrete-time controllers are designed through the solution of two Riccati equations, while a convex optimization approach is proposed in [
13]. The interested reader is referred to [
14], and references therein, for a deeper discussion on discrete-time
mixed-sensitivity control design.
In general, algorithms for
control synthesis cannot take into account the order of the controller, which instead depends on the order of the transfer functions defining the underlying optimization problem. However, in several practical applications, like PI and PID controllers or embedded control systems, the controller structure is a-priori fixed and cannot be modified. In [
15], the authors show that controller structure constraints make the
control design problem non-convex and NP-hard to be solved. The main difficulty is that structural constraints produce bilinear matrix inequalities (BMI) [
16], that are non-convex. Convexification methods to transform the BMIs constraints in LMIs through variable change (see, e.g., [
17]) or inner convex approximations (see, e.g., [
18]) are proposed in the literature. However, the success of these methods depends on the specific structure of the constraints and cannot be generalized. A common approach to BMIs problems is represented by iterative algorithms (see, e.g., [
19,
20,
21,
22] and references therein) that finds local optimum solutions in polynomial time.
To avoid numerical difficulties related to BMIs, some techniques based on the controller or the plant order reduction have been proposed in [
23,
24,
25]. However, the plant order reduction leads to higher conservatism in the uncertainty model, while the controller order reduction leads to performances degradation. Moreover, these techniques still cannot ensure a specific controller structure (e.g., PID).
Burke et al., in [
26], propose a gradient sampling algorithm for the design of a fixed-order
controller, which is implemented in the
HIFOO Matlab toolbox (see [
27]). Another Matlab toolbox for the design of fixed-structure controllers is
Hinfstruct, which implements the algorithm proposed in [
28] and is based on the Clarke sub-differential approach presented in [
29]. Both these Matlab packages are based on local optimization techniques, which have no guarantees about the convergence to the global optimal solution.
A few approaches based on global optimization have also been proposed in the literature to design fixed structure controllers. These approaches require a parametric representation of uncertain plants and exploit interval arithmetic tools to synthesize the
control problem. In [
30], the authors present a remarkable result by providing a branch-and-bound based algorithm to compute inner and outer approximations of the controller parameter set. Other global optimization-based approaches rely on quantifier elimination techniques (see, e.g., [
31]).
Among the several structures, the
mixed-sensitivity design of PID controllers is the most investigated in the literature. Convex optimization techniques have been proposed in [
32,
33] to tune continuous-time PID controllers, while bilinear transformation is used to compute discrete-time regulators in [
34]. The main difficulty related to the fixed-structure controller design is related to the non-convexity of the stabilizing parameter set. For linear parametrized controllers, inner convex approximations are proposed in [
35,
36,
37].
In this paper, we propose a unified framework to design continuous and discrete-time fixed structure controllers in the framework of the mixed-sensitivity approach. Starting from the work [
38], we extend the previous results to the most general case by considering both continuous and discrete-time systems. In the proposed algorithm, we first define the set of controller parameters that achieve robust stability and nominal performances of the feedback control system. Then, we rewrite the controller design problem as the positivity test over a bounded domain. By exploiting Putinar positivstellensatz theorem [
39], we formulate the
mixed sensitivity controller design as the non-emptiness test of a convex set defined through a number of sum of squares (SOS) polynomial constraints. The problem to be solved is a convex semi-definite problem (SDP), whose solution can be found in polynomial time.
The paper is organized as follows:
Section 2 reviews
mixed-sensitivity notations and backgrounds fundamentals, while the problem formulation is given in
Section 3. In
Section 4, we present the proposed
control design approach based on the Putinar positivstellensatz. Numeric examples are provided in
Section 5, to show the effectiveness of the proposed methods to design both continuous and discrete-time controllers, together with the results obtained with the Matlab function
Hinfstruct.
Section 6 shows experimental results of the controller design problem for a magnetic suspension system, and
Section 7 concludes the paper.
2. Notations and Background
In this section, we introduce the notations that are used in the paper and review some basics on mixed sensitivity controller design. We define the transfer functions through a generic variable which is when dealing with continuous time (CT) systems and for discrete time (DT) systems. Given a transfer function , we denote with the frequency response computed by assigning for CT systems and for DT systems, where is the sampling time.
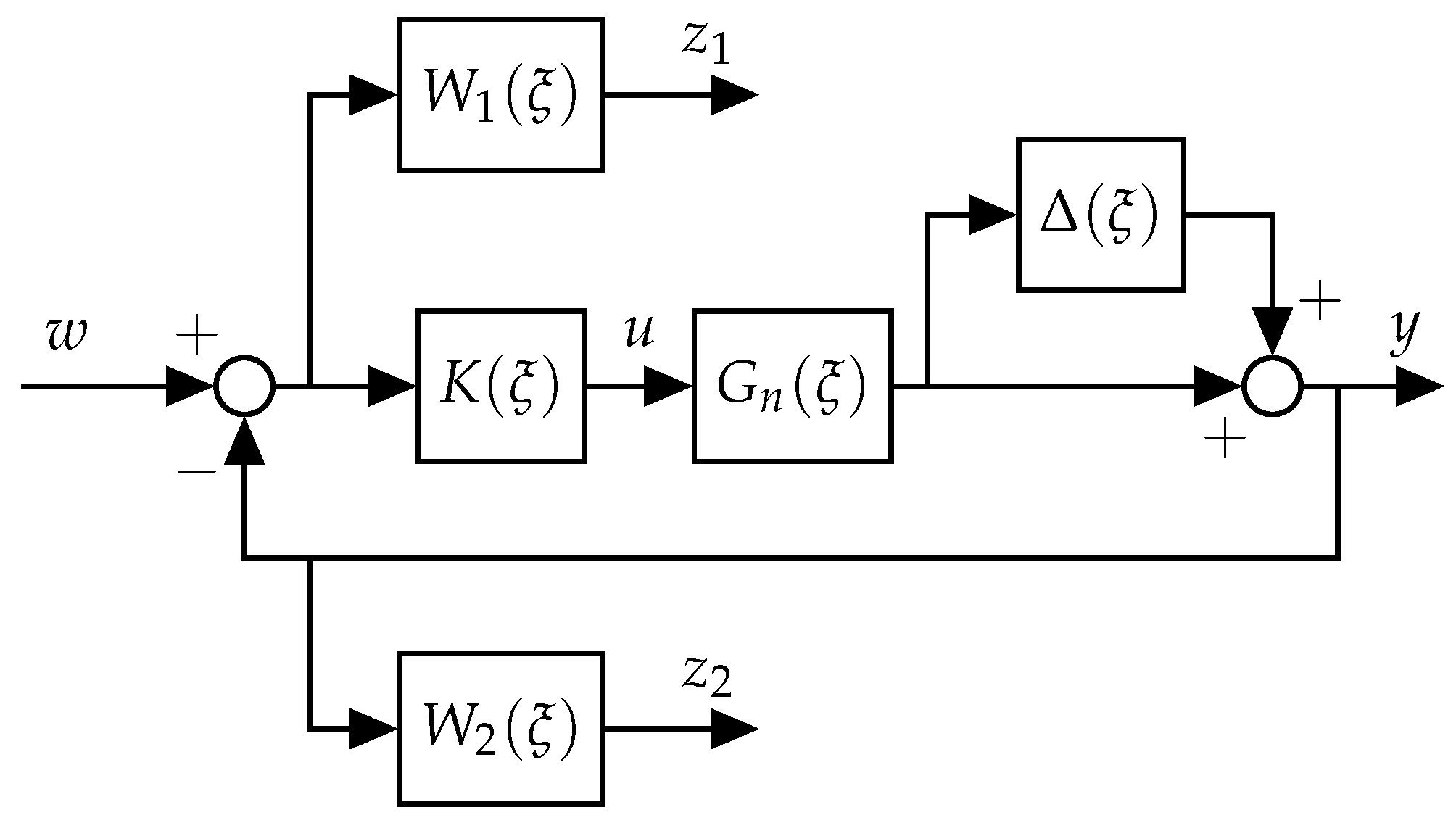
Let us consider the feedback control system depicted in
Figure 1, where
and
are the nominal plant and the controller transfer functions, respectively,
is the reference signal,
is the control input,
is the measured output and
and
are the controlled outputs associated to the assigned performance requirements.
Let
be the uncertain model of the plant described by
where
is unstructured multiplicative uncertainty, which is bounded by a given transfer function
, i.e.,
such that
for CT systems and
for DT systems.
and
are suitable weighting functions that describe the performance constraints on the nominal sensitivity
and nominal complementary sensitivity transfer function
, respectively. For a given nominal plant
and a controller
, the nominal loop transfer function is defined as
the nominal sensitivity function and complementary sensitivity function are defined as
and
respectively. Nominal closed loop system performances constraints are met if
where
is the
norm of a dynamical system, which, for a generic single-input single-output (SISO) system
, is
In the remainder of this section, we review some definitions and results about feedback systems properties.
Definition 1. A feedback system is said to be well-posed if all closed-loop transfer functions, defined from any exogenous input to all internal signals, are well-defined and proper.
Result 1. A necessary and sufficient condition for well-posedness is that exists and is proper, i.e., is not strictly proper. A stronger condition for well-posedness is that either or be strictly proper transfer functions (see, e.g., [4]). Definition 2. A well-posed feedback system is internally stable if, and only if, all the transfer functions from any input to any output are BIBO stable (see, e.g., [40]). Result 2. Necessary and sufficient conditions for the internal stability of feedback systems are that (i) the nominal sensitivity function is BIBO stable and (ii) there are no unstable zero/pole cancellations while forming the nominal loop function . [40] provides a detailed proof. Definition 3. A feedback system is robustly stable if the controller makes the system internally stable for all possible uncertain plants.
Result 3. By applying the small gain theorem (see, e.g., [40]), the system depicted in Figure 1 is robustly stable if the nominal sensitivity function is stable and Further details can be found in [
4].
3. Problem Formulation
In this section, we formulate the
controller design problem for both CT and DT systems. In this work, we propose a methodology to design a
controller
which guarantees robust stability to unstructured multiplicative uncertainty bounded by the function
, and fulfils the nominal performance defined through the weighting functions
and
. The controller is assumed to have a fixed structure, i.e., to belong to a certain class
, which guarantees the well-posedness condition, and is characterized by an
-th order transfer function
where the denominator and numerator coefficients,
and
, are polynomial functions in a suitable parameter vector
to be designed.
We assume to know the transfer functions
,
and
, which take into account the design constraints, as well as the nominal plant transfer function defined as
where
and
are polynomial functions and
has no roots at
or
.
Remark 1. It is worth noting that, since depends on , functions (3)–(5) involving K depend on the parameter vector as well. However, for the sake of simplicity, we omit as a parameter in all functions except for . Definition 4. We define the stabilizing controller parameter setas the set of all the controller parameters which guarantees the internal stability of the feedback control system depicted in Figure 1. Definition 5. By applying Result 3, we define the robust stabilizing controller parameter setas the set of all the controller parameters which guarantees the internal robust stability of the uncertain plant . We can derive some properties of the selected controller class through the analysis of the sets and .
Result 4. If the set is empty then the chosen controller structure is not suitable to provide stability of the nominal plant .
Result 5. If the set is empty then the chosen controller structure is not suitable to provide robust stability of the uncertain plant .
Definition 6. We define the feasible controller parameter set as the set of parameter which guarantee robust stability for the plant and the achievement of the nominal performances described by the given weighting functions and . It is worth noting that, by considering Equations (
6) and (
13), the set
can be written equivalently as
where
is such that
The emptiness of the set highlights that the chosen controller class structure is not suitable to achieve the closed-loop stability and desired closed-loop performance specifications. Instead, a large or unbounded set may suggest that the controller structure may fulfil more demanding specifications.
Remark 2. Through the procedure described in the next Section, it is possible to test several controller structures, e.g., a commercial solution, and to select the cheapest solution that guarantees the non-emptiness of the feasible controller parameters set.
4. An SOS Approach to Mixed Sensitivity Design with Fixed Structure Controller
In this section, we consider the problem of looking for a parameter vector
belonging to the feasible controller parameters set
. We rewrite this problem as the positivity check of a number of multivariate polynomials over a bounded semi-algebraic set. This problem, which is known to be NP-hard, can be efficiently solved by applying the
Putinar positivstellensatz (see, e.g., [
39] for details), through which the polynomial positivity check is reformulated in terms of SDP.
We rewrite
as the intersection of two sets
, where the performance controller parameters set
is defined as
The properties of the set can be obtained through the analysis of the sets and .
4.1. Mathematical Description of the Set
At first, we look for an explicit mathematical formulation of the set . For internal stability, both conditions of Result 2 must be satisfied. The first condition requires that the nominal sensitivity function is stable, which is achieved if the roots of have negative real part when dealing with CT systems, or have the module less than one when DT systems are considered.
4.1.1. Routh’s Stability Criterion
For CT systems, we can evaluate the sign of the real part of the roots of a polynomial function
by applying the Routh’s stability criterion, which is based on the Routh’s Table reported in
Table 1 (further details on Routh’s stability criterion can be found in book [
41]).
Coefficients
in the Routh’s Table are given by
and we stop if we achieve a zero coefficient. The remaining coefficients are computed in a similar way, by multiplying the terms of the two previous rows
Result 6. All the roots of a polynomial function have negative real part if, and only if, all the coefficients in the first column of the Routh’s table show the same sign, i.e., 4.1.2. Jury’s Stability Criterion
The Jury’s stability criterion [
42] is used to check that the roots of a DT polynomial function
are located inside the unitary circle, and it is based on the Jury’s Table (see
Table 2), which is characterized by
rows. The even numbered rows are the elements of the preceding row in reverse order, while the odd numbered rows coefficients are computed as
Result 7. All the roots of the polynomial function (22) are inside the unitary circle if, and only if, all the following conditions occur The stability constraints for the nominal sensitivity transfer function
are obtained by applying the Result 6 or 7, if the system is DT or CT, respectively, to the numerator of
, which is
The second condition in Result 2 requires to avoid unstable zero/pole cancellations while multiplying and . If does not show unstable zeros or poles, this requirement is automatically achieved. If has unstable poles or unstable zeros, we impose effective constraints to force controller numerator and denominator functions to have only stable roots. This is obtained by applying the Routh’s, or the Jury’s, criterion to or to .
Remark 3. It may seems that, by imposing to have only stable roots, the controller cannot have poles at or . However, these poles are needed to guarantee zero steady-state tracking error either to polynomial reference signals or to polynomial disturbance signals. We rewrite the controller denominator aswhere for CT systems or for DT systems and μ is the multiplicity of the roots at or of . Instead of imposing the controller denominator to have only stable roots, we impose stability constraints only to the polynomial function . In fact, by assumption, the plant has no roots at or and no unstable cancellations can occur between and . Remark 4. The set is defined by the set of conditions coming from the application of the Routh/Jury stability criterion on (25). From the definition of and , it follows that the coefficients of in (25), as well as the coefficients in Table 1 and Table 2, are polynomial functions of the parameter vector . Then, for both CT and DT systems, is a semi-algebraic set defined by a number of polynomial inequalities . 4.2. Polynomial Description of the Set
A polynomial description of the performance controller parameter set is obtained by the following result.
Result 8. Through a suitable choice of a variable ϕ and a set Φ, the inequalities in (16) can be equivalently written aswhere are polynomial functions of both and ϕ Proof. Let us consider the two rational transfer functions
where
and
. Then, by applying the
norm definition (
7), we can rewrite conditions (
16) as
For CT systems,
and
are complex rational functions and their magnitudes are polynomial functions in
and
. Therefore, by setting
and
we have (
27).
Instead, the magnitude of a DT transfer function depends on
. Since
is a bijective function for
, we can rewrite
as
where
a and
b are scalar variables. Therefore, for DT systems, through (
29) and (
30), we obtain (
27) by choosing
and
. □
4.3. SOS Relaxation of the Set
From Result 8, the closed loop system achieves the performance specifications defined by and if the polynomial functions and are positive over the semi-algebraic set . It is well known from the literature that testing the global non-negativity of a polynomial function is an NP-hard problem. In this subsection, by exploiting the Putinar’s Positivstellensatz, we compute a SOS decomposition of polynomial functions , and , and we also show that if a non-negative polynomial has a SOS representation, then one can compute polynomial positivity by using SDP optimization methods.
A polynomial
is SOS if it can be written as
where,
denotes the ring of polynomials in
. Suppose that
is the vector of all the monomials of degree less than or equal to
, given by
where
. The polynomial
can be expressed as a quadratic form in the monomial vector
thanks to the following result.
Result 9. A polynomial has a SOS decomposition if, and only if, there exists a real symmetric and positive semi-definite matrix , such that , for all (see [43] for a detailed proof). Thus, the problem of checking whether a polynomial is SOS is equivalent to the problem of finding a symmetric positive definite matrix .
The Putinar’s Positivstellensatz, which is reviewed below, can be applied to (
27) to derive sufficient conditions to verify that the inequalities are satisfied.
Result 10.(Putinar’s Positivstellensatz [39]) Consider a compact semi-algebraic setwhere are m polynomial functions. If a polynomial f is positive in Φ then there are polynomials , such thatwhere is the set of SOS polynomials in ϕ up to the degree . The integer δ is called relaxation order. Based on result 10, we state the following result.
Result 11. For , where is the set of SOS polynomials in ϕ up to the degree , ifthen is positive on semi-algebraic set Φ.
Proof. The proof is rather trivial and based on the fact that is a SOS polynomial. □
The feasible controller parameters set
can be relaxed to a convex set
for a suitable value of the relaxation order
. In fact, the Result 11 can be applied to polynomial inequalities which define the set
and
, to replace the polynomial constraints defined by (
21), (
24) and (
27) with a set of SDP constraints in the form (
35).
Remark 5. If the set (14) is not empty, then the relaxed problem obtained by applying Result 11 admits a feasible solution for any relaxation order , where is an integer value large enough (see [44] and reference therein for further details). Therefore, the problem of extracting a controller parameter vector from the the feasible controller parameters set in (14) is replaced by a convex SDP problem. 6. Experimental Example
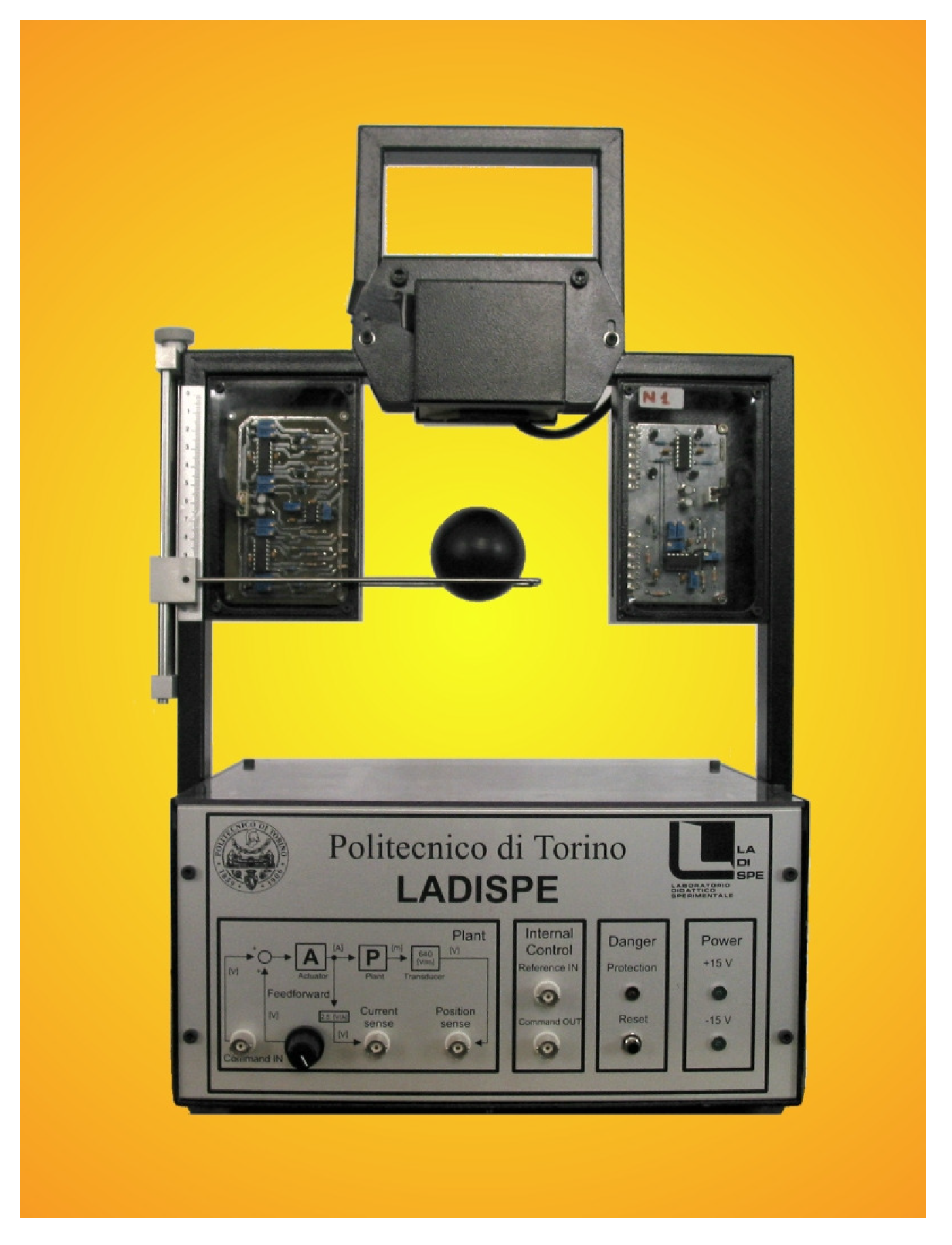
In this section, we apply the proposed control design technique to design a controller for the magnetic levitation system shown in
Figure 10.
In this system, a transconductance amplifier regulates the current through an electromagnet coil proportional to the input voltage
u. The magnetic field, generated by the current, exerts a force on a light ball in the opposite direction to the gravity force. An optical transducer measures the ball position and produced the output voltage signal
y. The book [
47] provides a detailed description of the considered system. Magnetic levitation systems are highly non-linear unstable systems. In order to design a low order fixed structure controller, the control schema depicted in
Figure 1 is considered, where a
is the linearized model of the magnetic levitation system obtained around a suitable equilibrium point and is given by
where
and
are the Laplace transform of the input and output voltage signals, respectively. It is worth noting that we consider the voltage transducer signal as system output to have a comparable reference signal
w that can be produced by a common laboratory equipment, i.e., a signal generator. Moreover, we can directly measure the output voltage
y with an oscilloscope, while the ball position in meters can be only computed through the knowledge of the mathematical model of the position transducer.
The nominal plant in Equation (
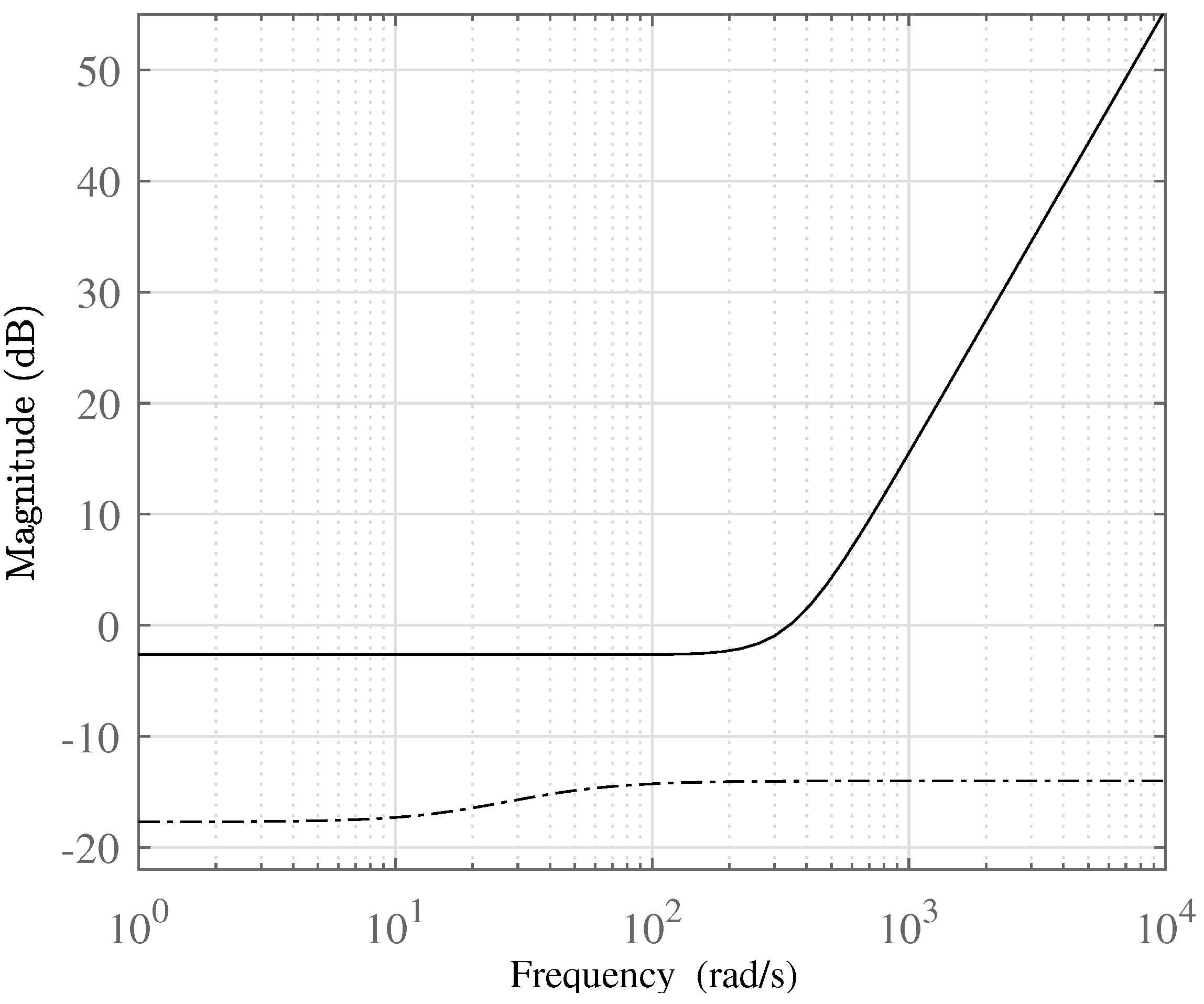
66) is subjected to multiplicative uncertainty characterized by the following weighting function
The aim is to design a controller in the form
where
is the unknown parameter vector, such that the closed loop system is internally stable. Moreover, for a square wave reference signal
with period 2 s, duty-cycle
and amplitude
V, the closed loop system must satisfy the following nominal specifications: (i) zero steady-state tracking error for a step reference, (ii) rise time
s, and (iii) overshoot
. The presence of a pole at
in
guarantees that the first requirement is implicitly achieved. According to the methodology described in [
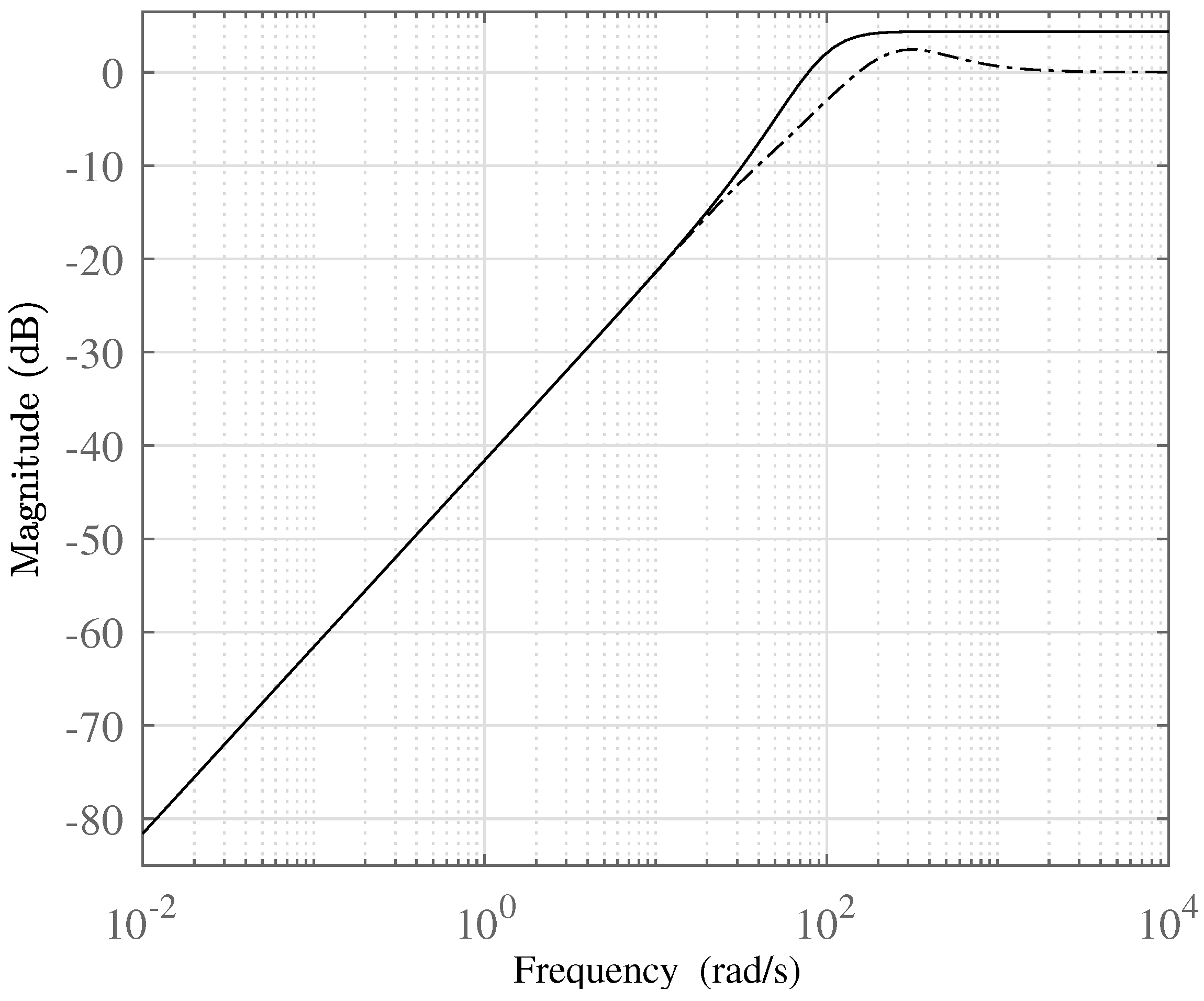
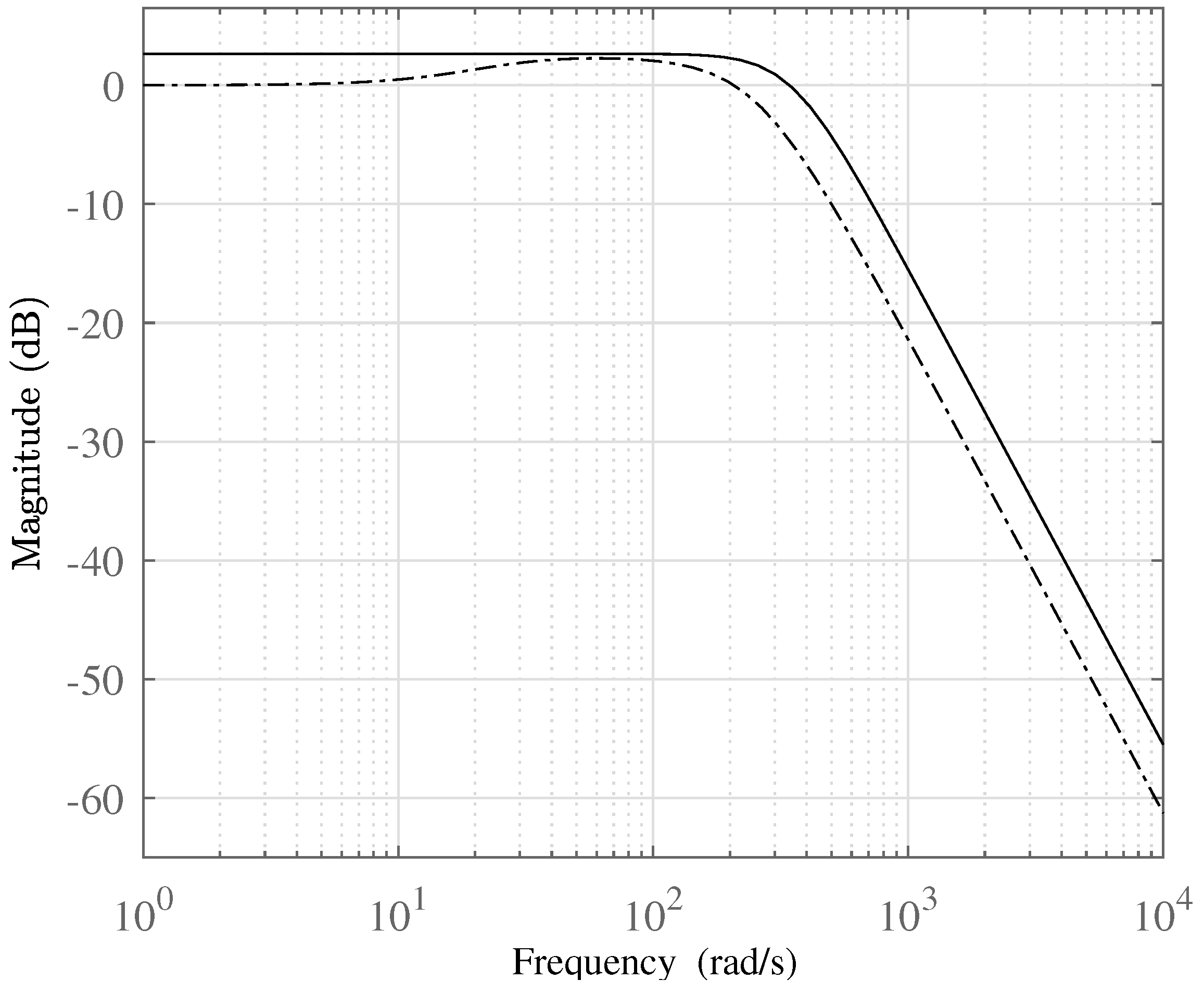
4], the time domain requirements are mapped into the frequency domain weighting filters
and
The constraints that define the stabilizing controller parameters set
are obtained by the Routh’s stability criterion, leading to
Since the magnetic levitation system is unstable, to avoid unstable pole-zero cancellation between the plant and the controller we consider stable
and
, where
and
Stability of
and
is ensured by exploiting Routh Hurwitz criterion which provide following additional constraints in set
.
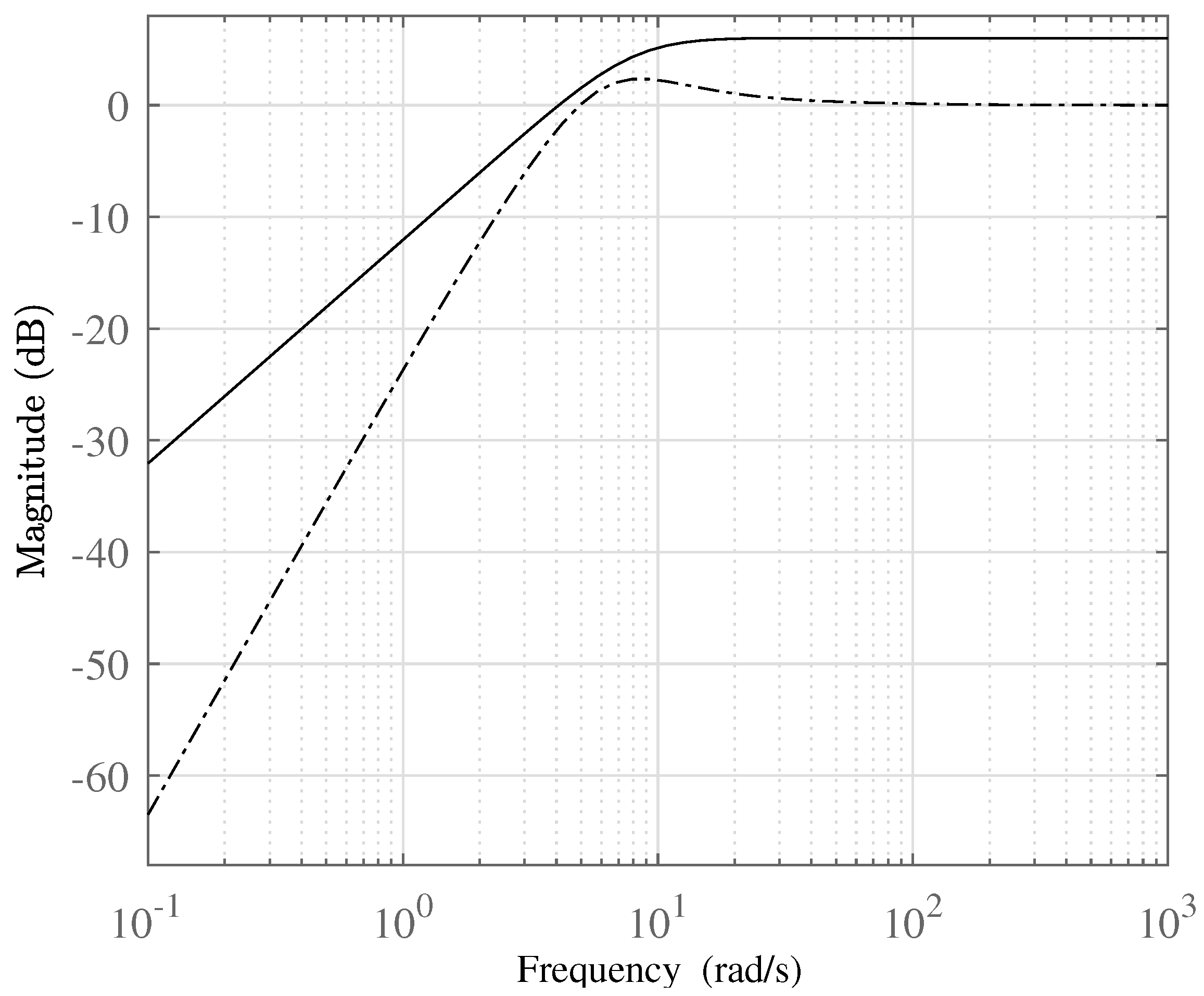
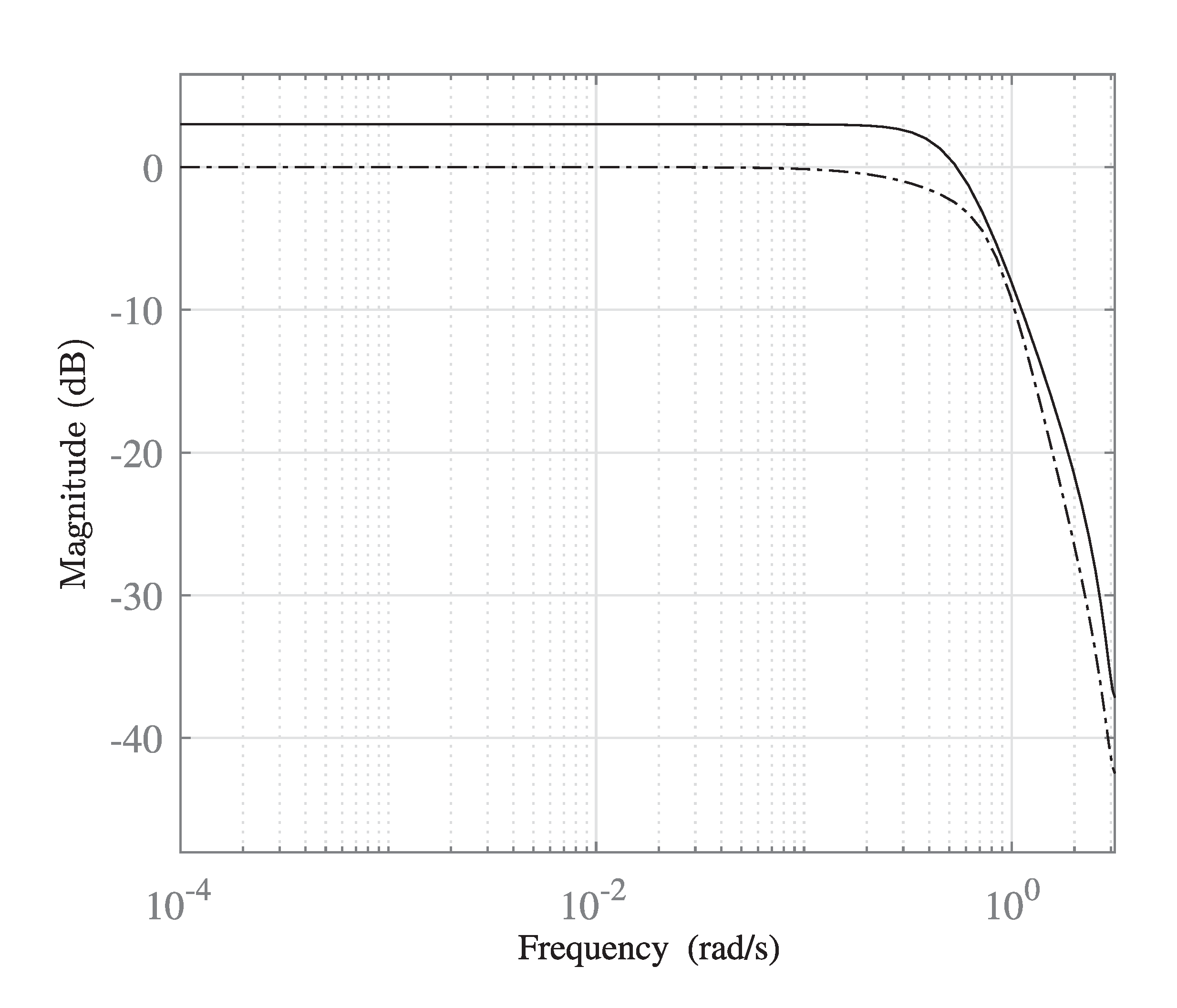
The graphical comparison between
and
is reported in
Figure 11. Since
, we choose
The performance set
is derived in the same way as in previous examples. Through Result 11, we formulate the controller design as a SDP optimization problem by setting the relaxation order
and
. The relaxed SDP problem is solved with Yalmip (see [
45]) and Mosek (see [
46]). The controller extracted from the feasible controller parameters set is
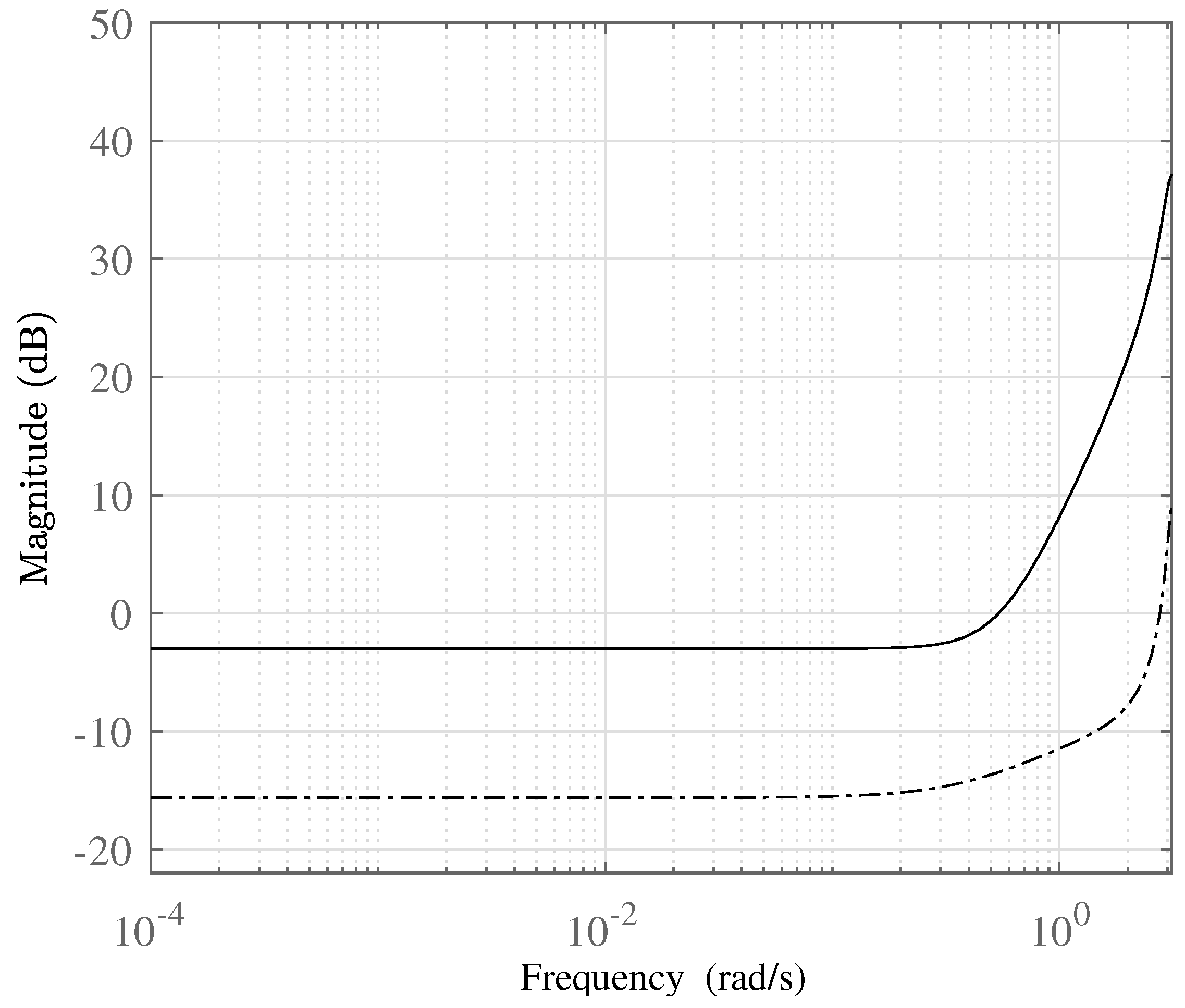
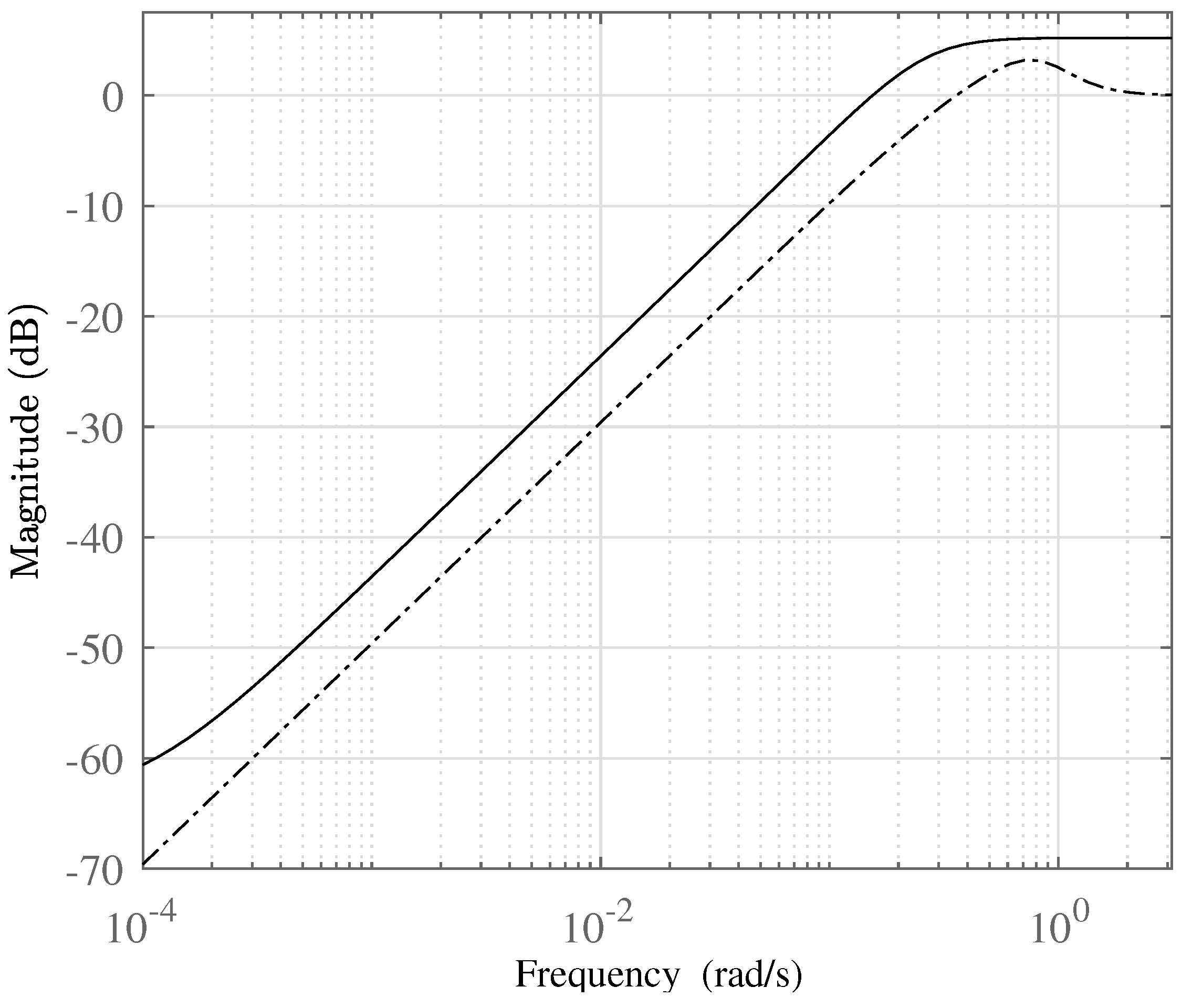
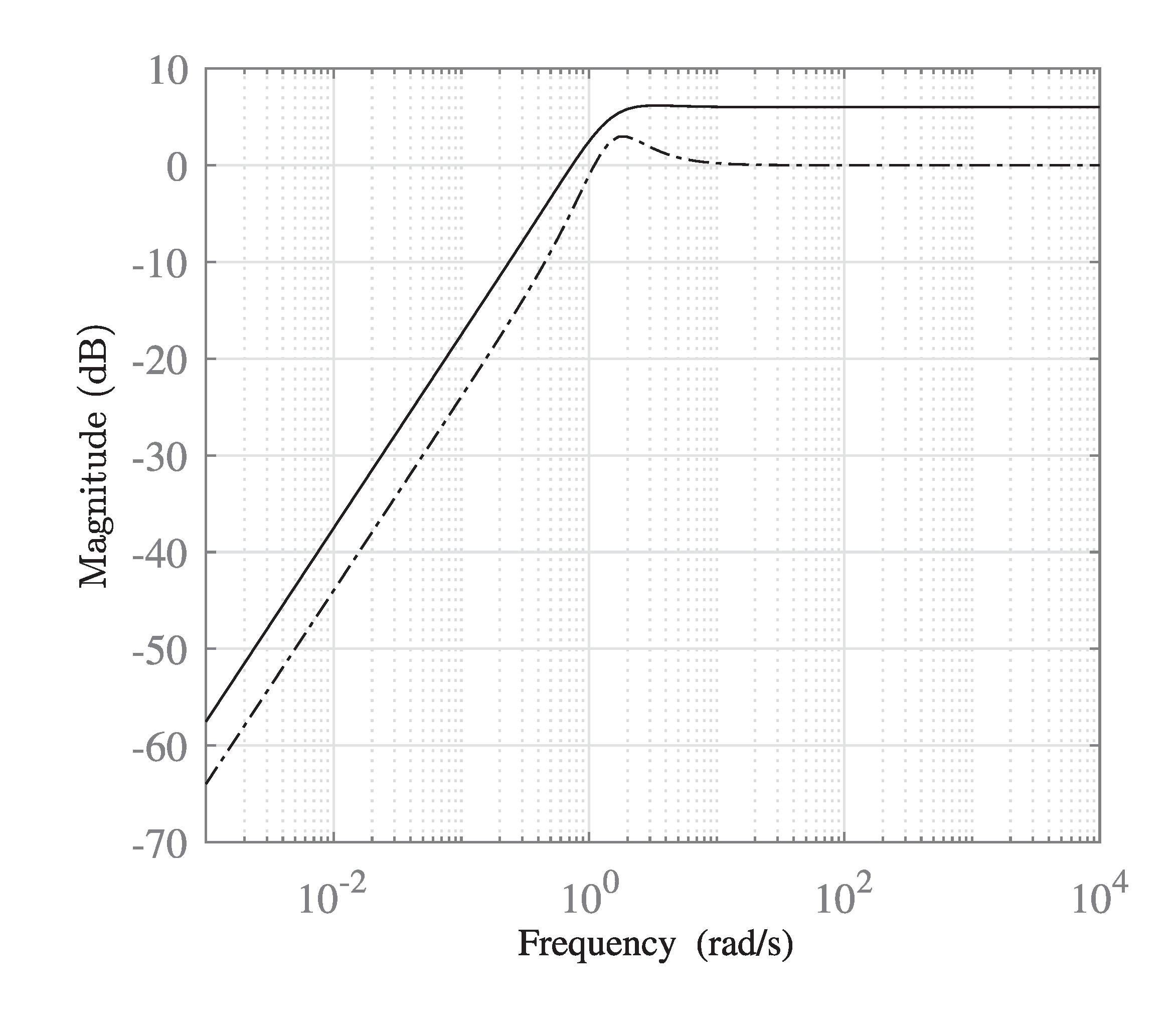
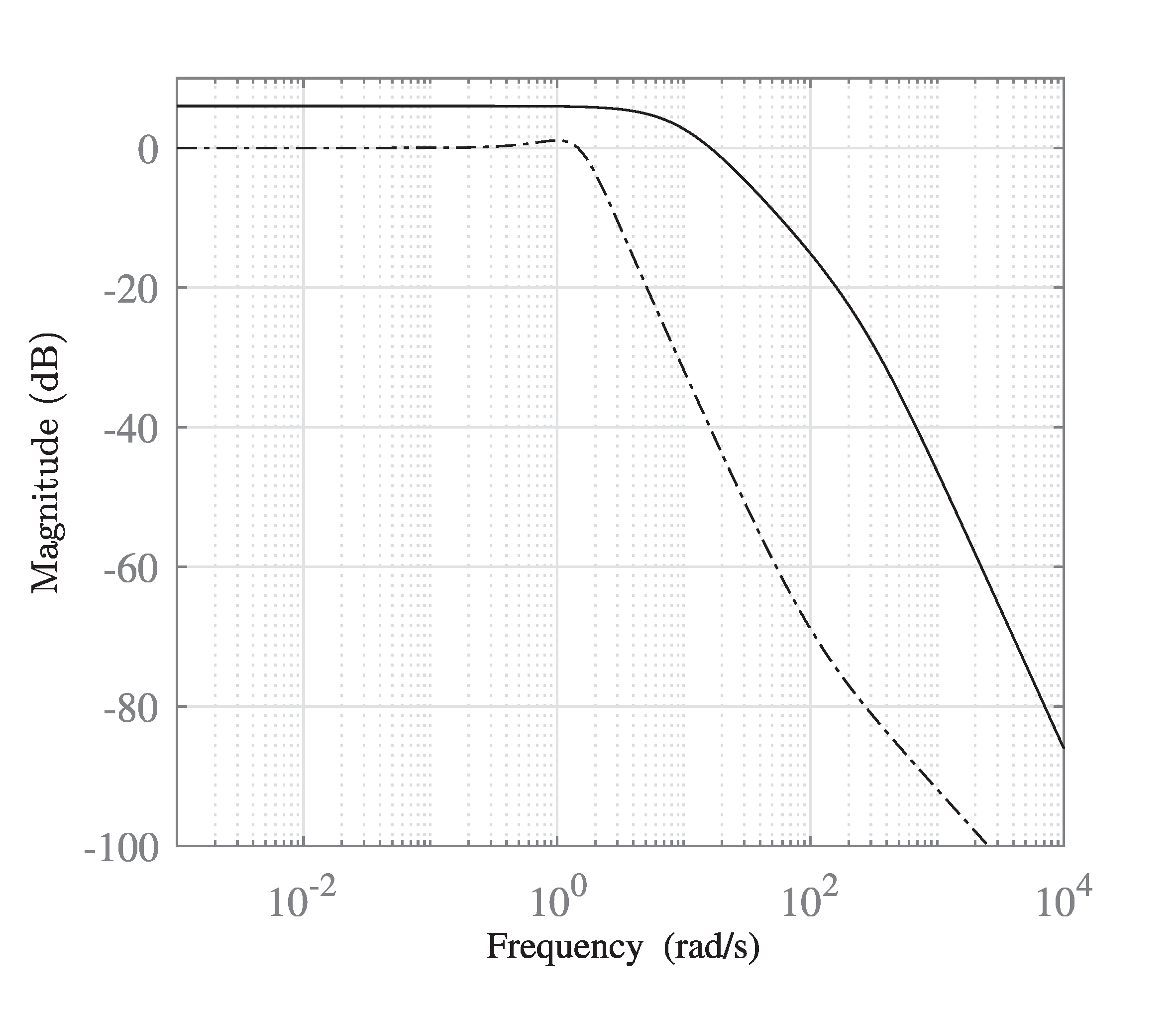
The controller achieves the nominal performances as
and
are smaller than
and
, respectively (see
Figure 12 and
Figure 13). Numerically,
= 0.99 and
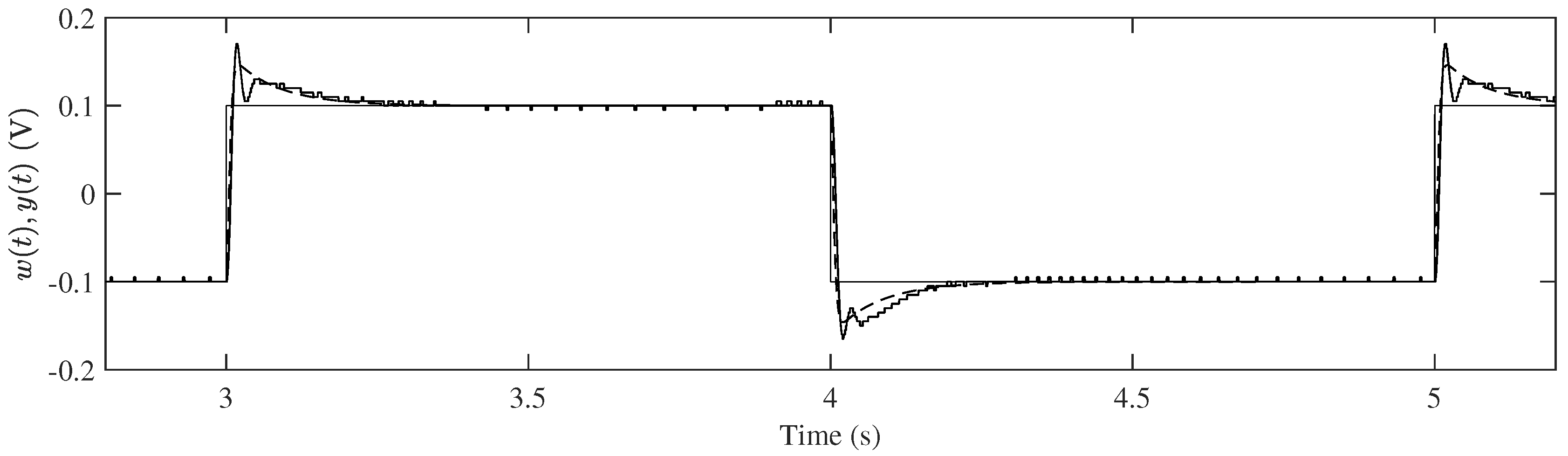
. We provide the comparison between the linearized system
and the real plant in
Figure 14, which shows the time-domain responses of the closed-loop systems when the reference is a square wave with amplitude
V and frequency
Hz. The linear system
achieves the time domain requirements: both the rise time
s and the overshoot
. However, the designed controller is not able to achieve the maximum overshoot requirement on the real plant, which is
. The larger overshoot is due to the model mismatch between the non-linear plant and the approximated linear model and, thus, does not depend on the specific approach proposed in this work. Despite this modeling error, the designed controller stabilizes the magnetic levitation system and guarantees the rise time
s.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}