6D Virtual Sensor for Wrench Estimation in Robotized Interaction Tasks Exploiting Extended Kalman Filter





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Context
1.2. Related Works
1.3. Paper Contribution
2. Sensorless Cartesian Impedance Control
3. Extended Kalman Filter for External Wrench Estimation
4. Simulation Results
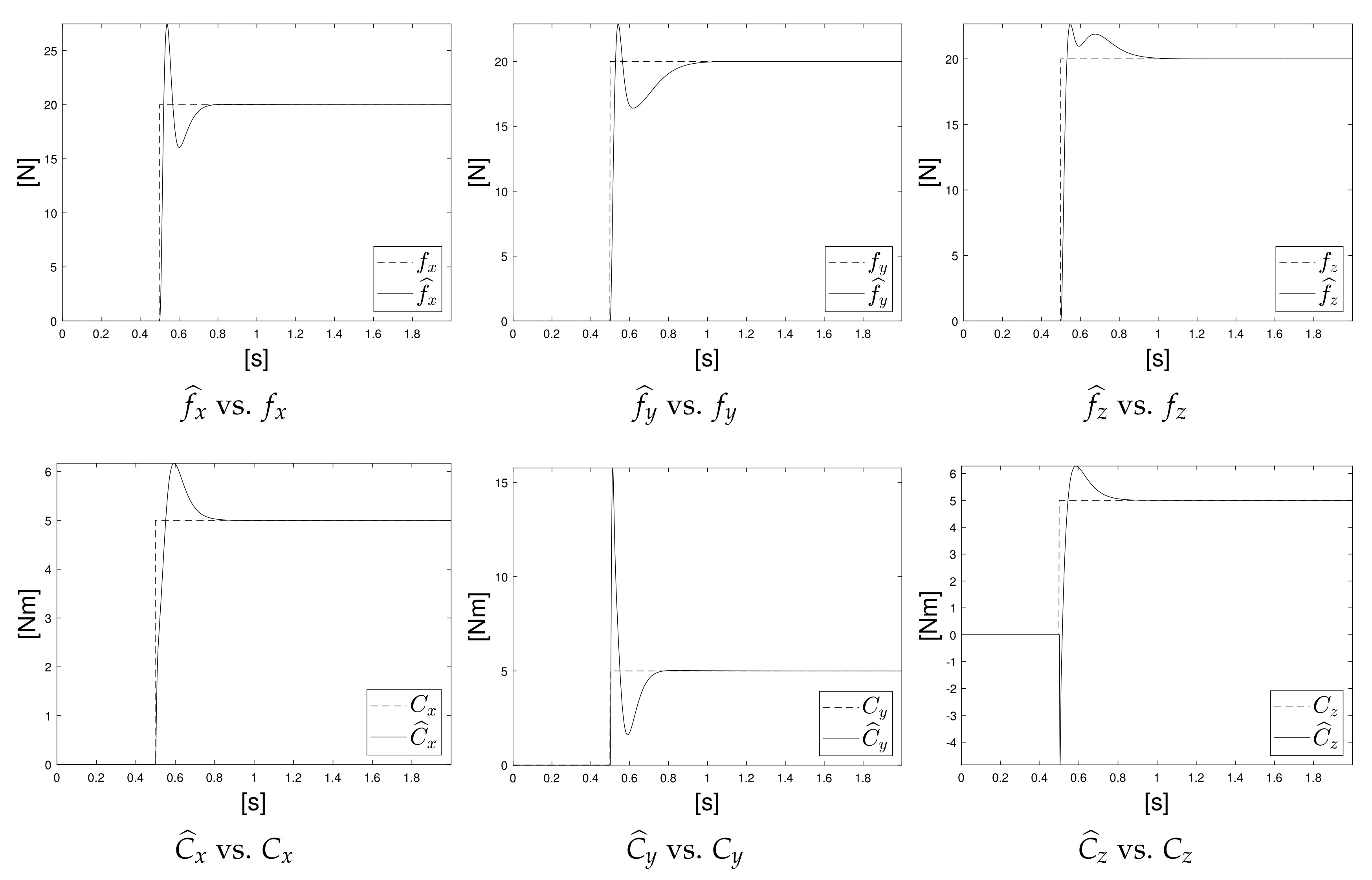
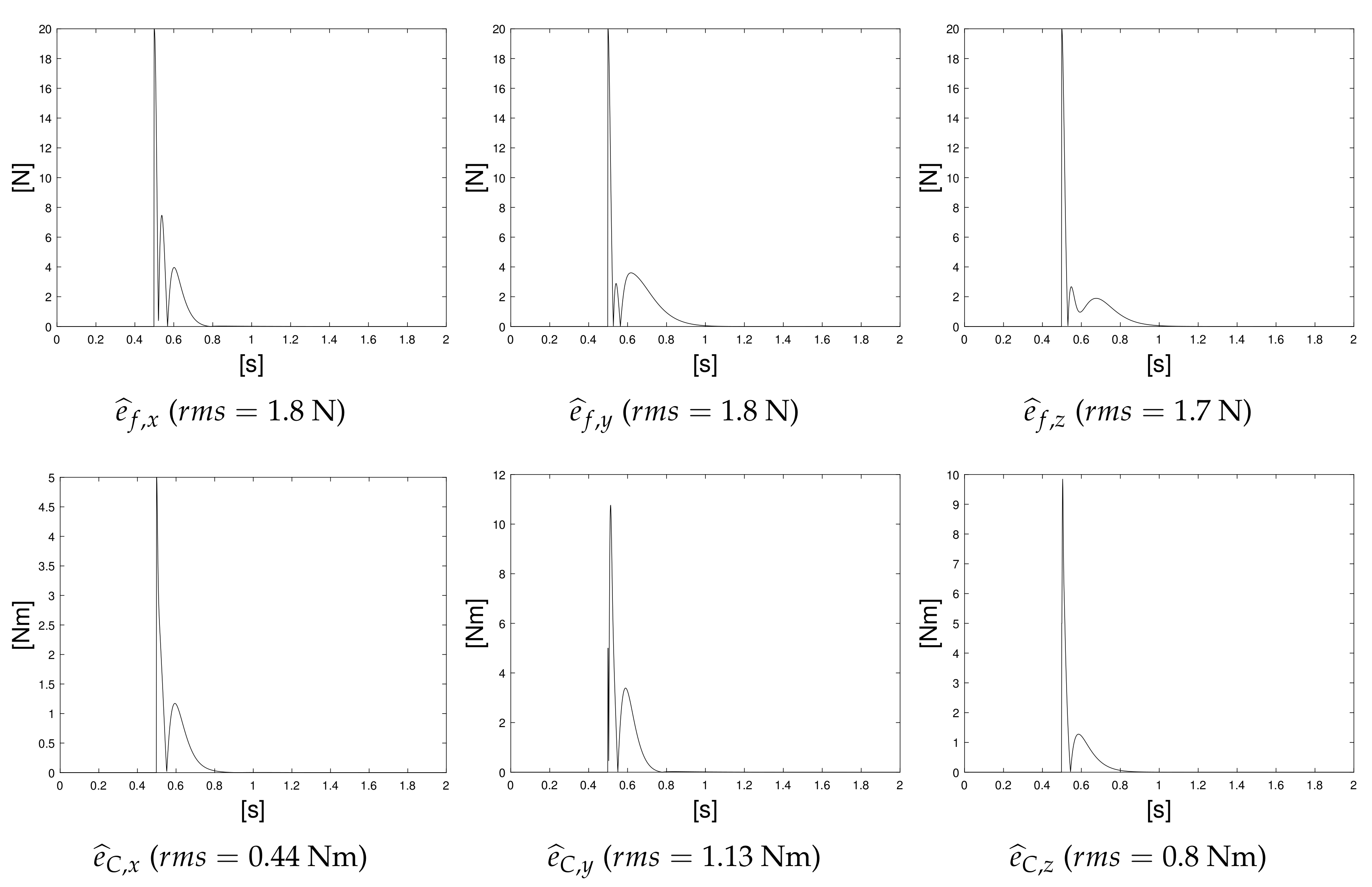
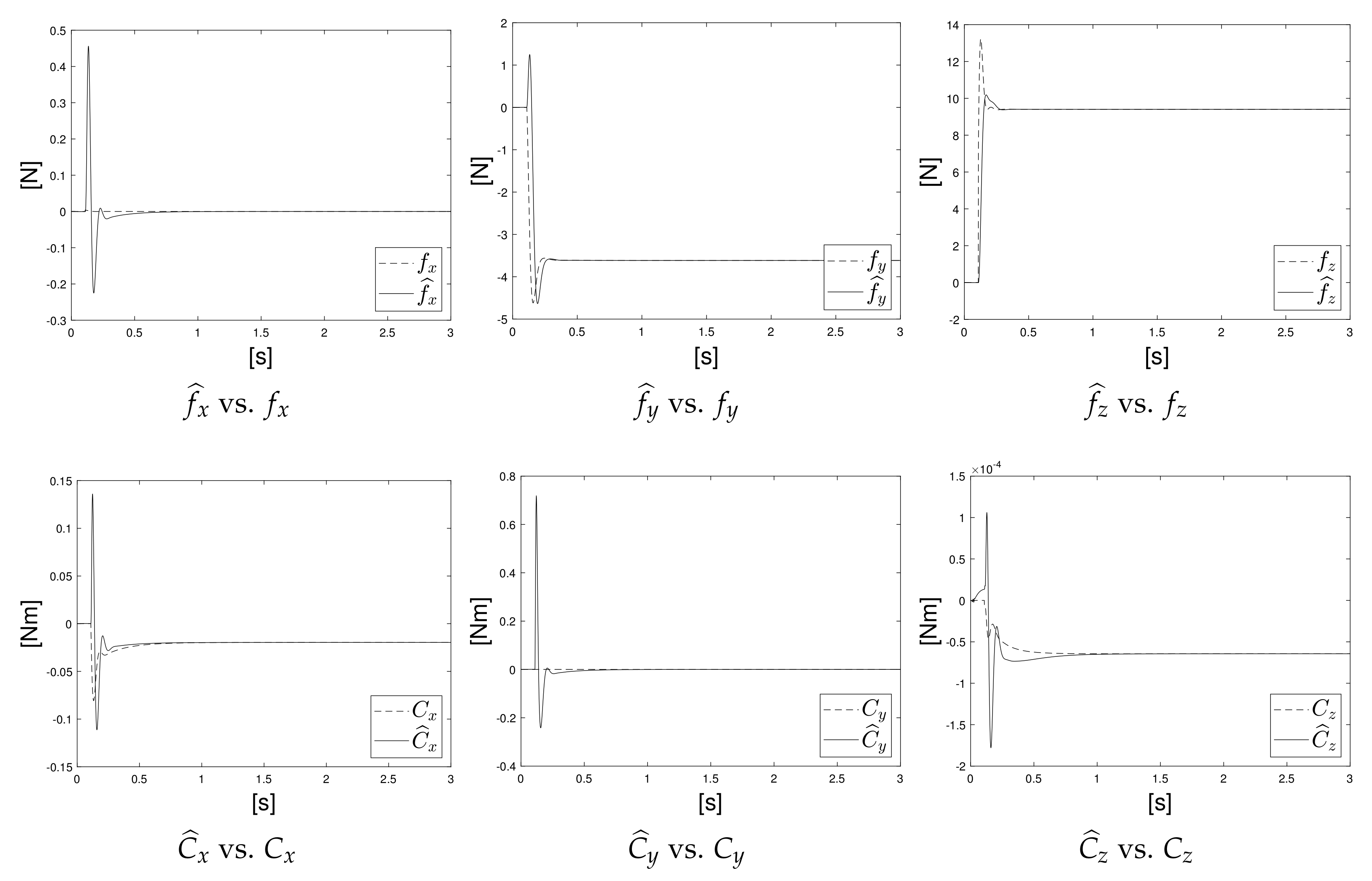
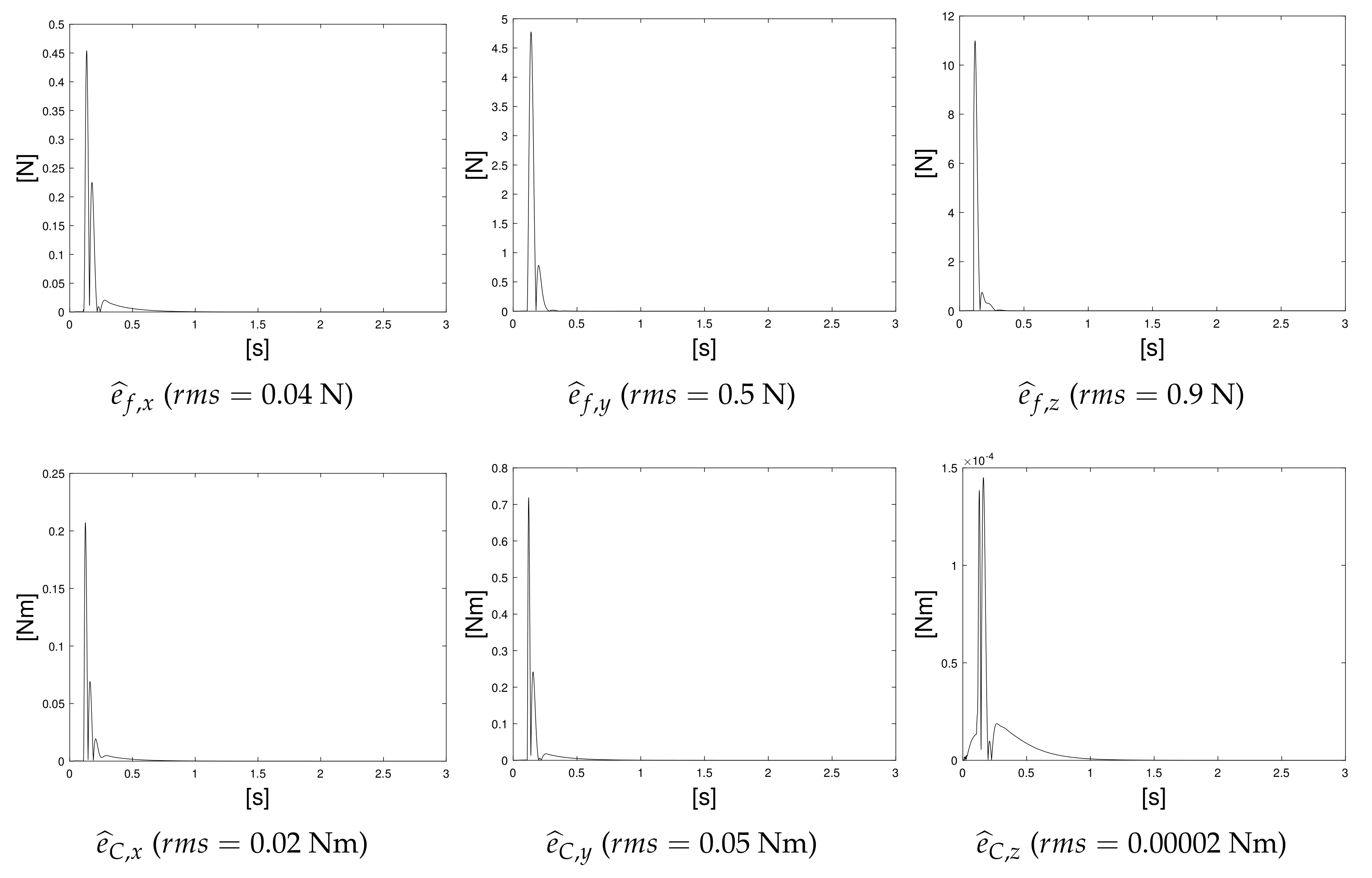
4.1. Constant External Wrench
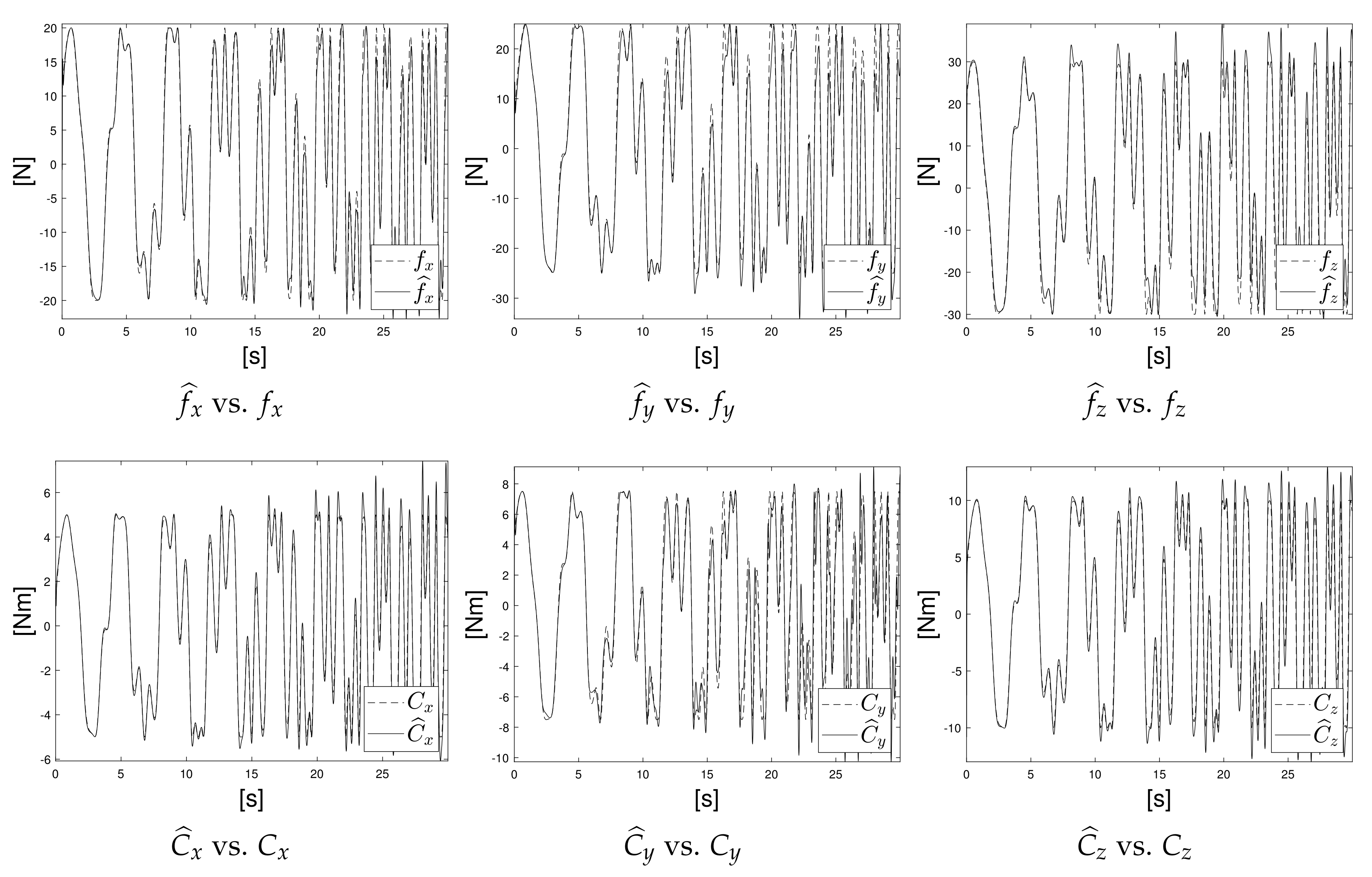
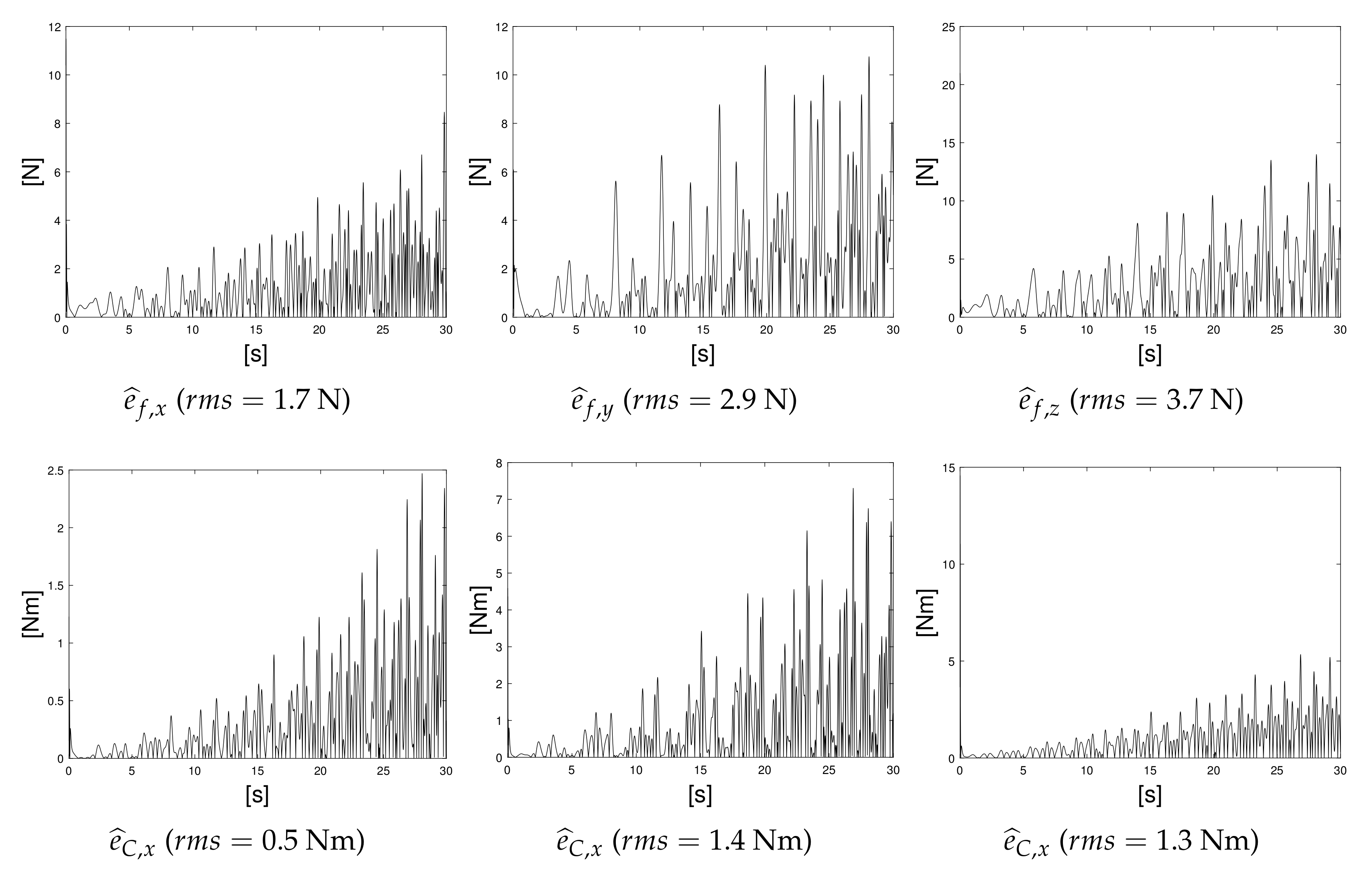
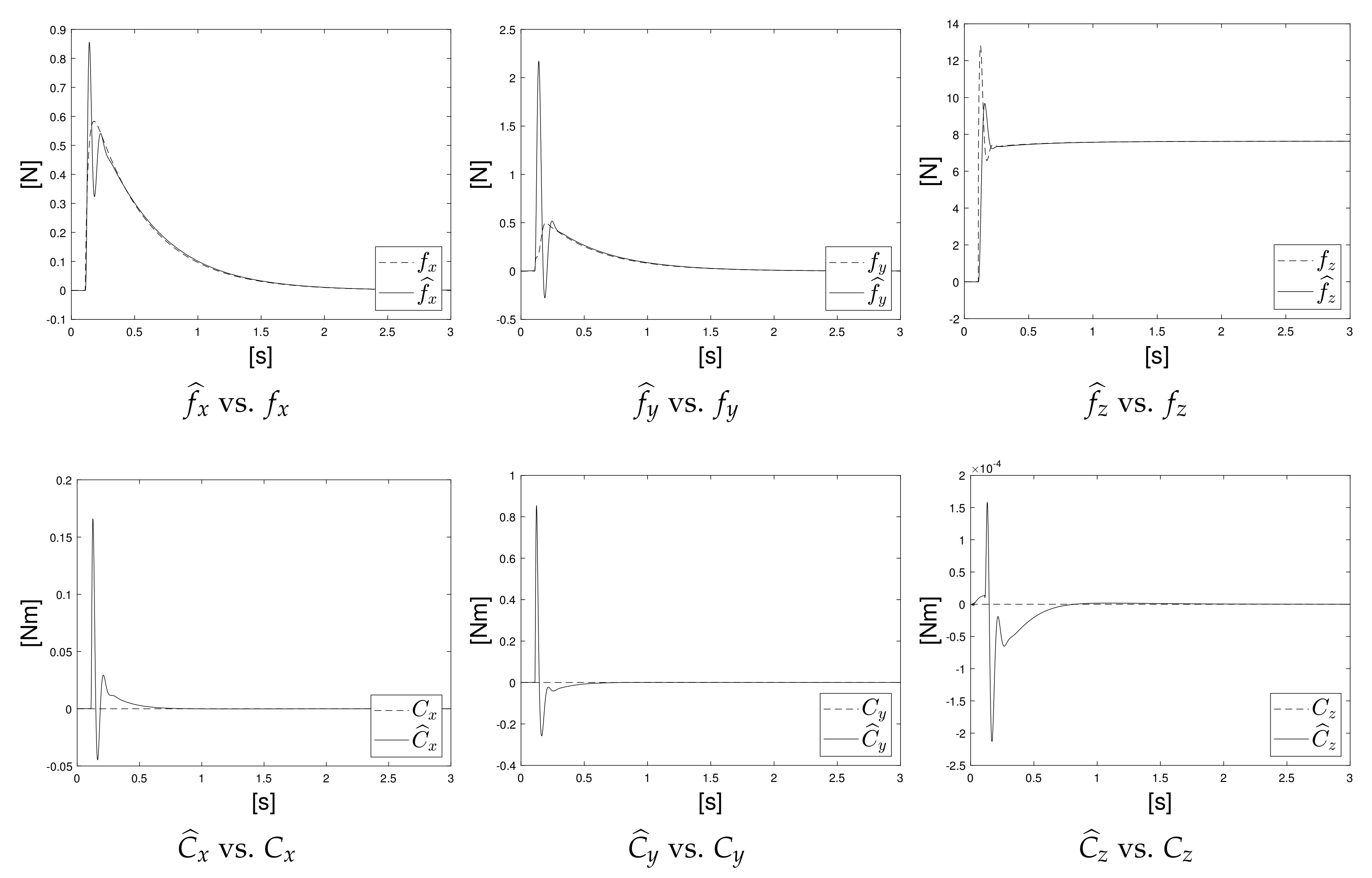
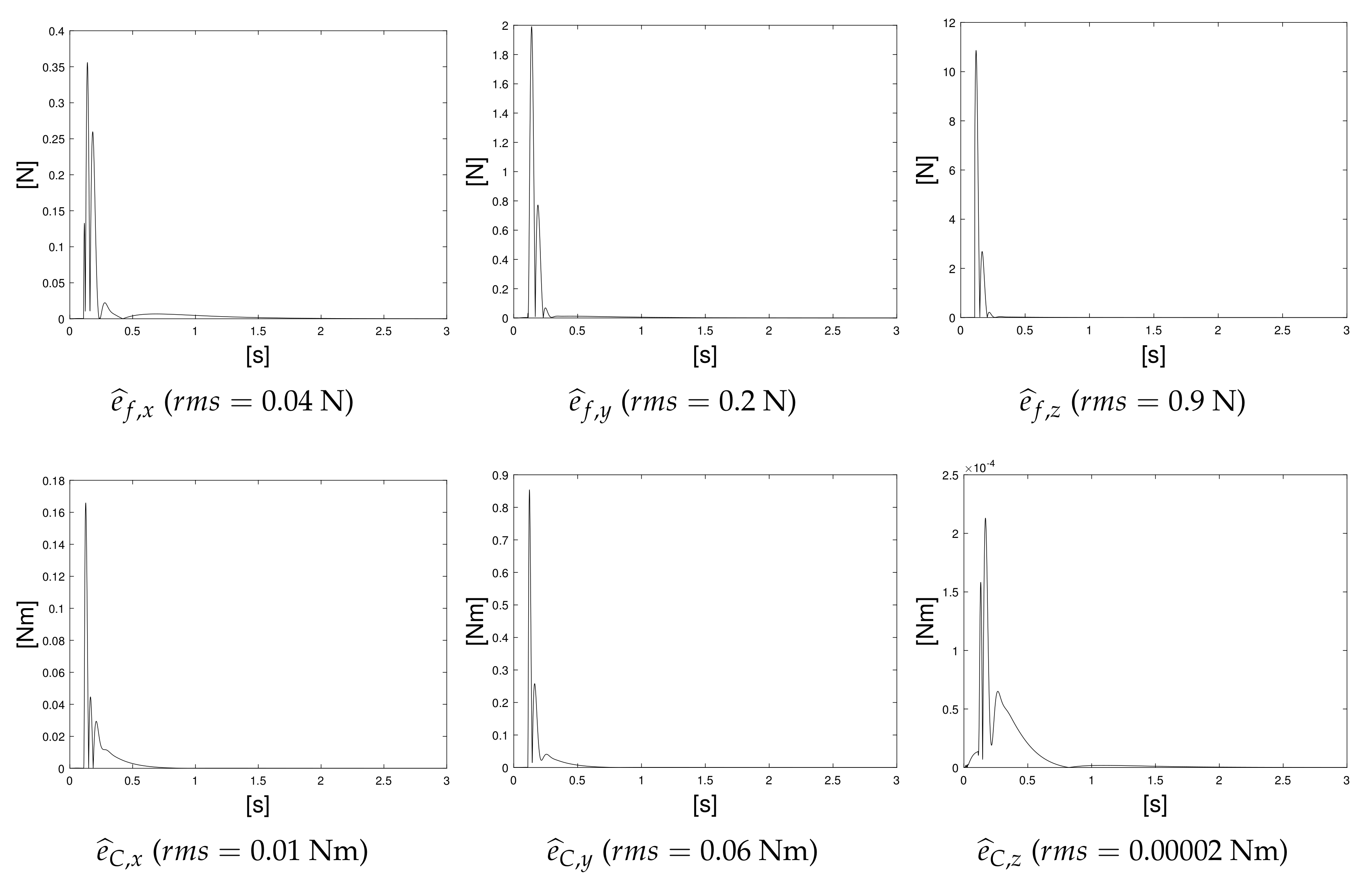
4.2. Variable-Sinusoidal External Wrench
4.3. Probing Task
4.4. Sliding Task
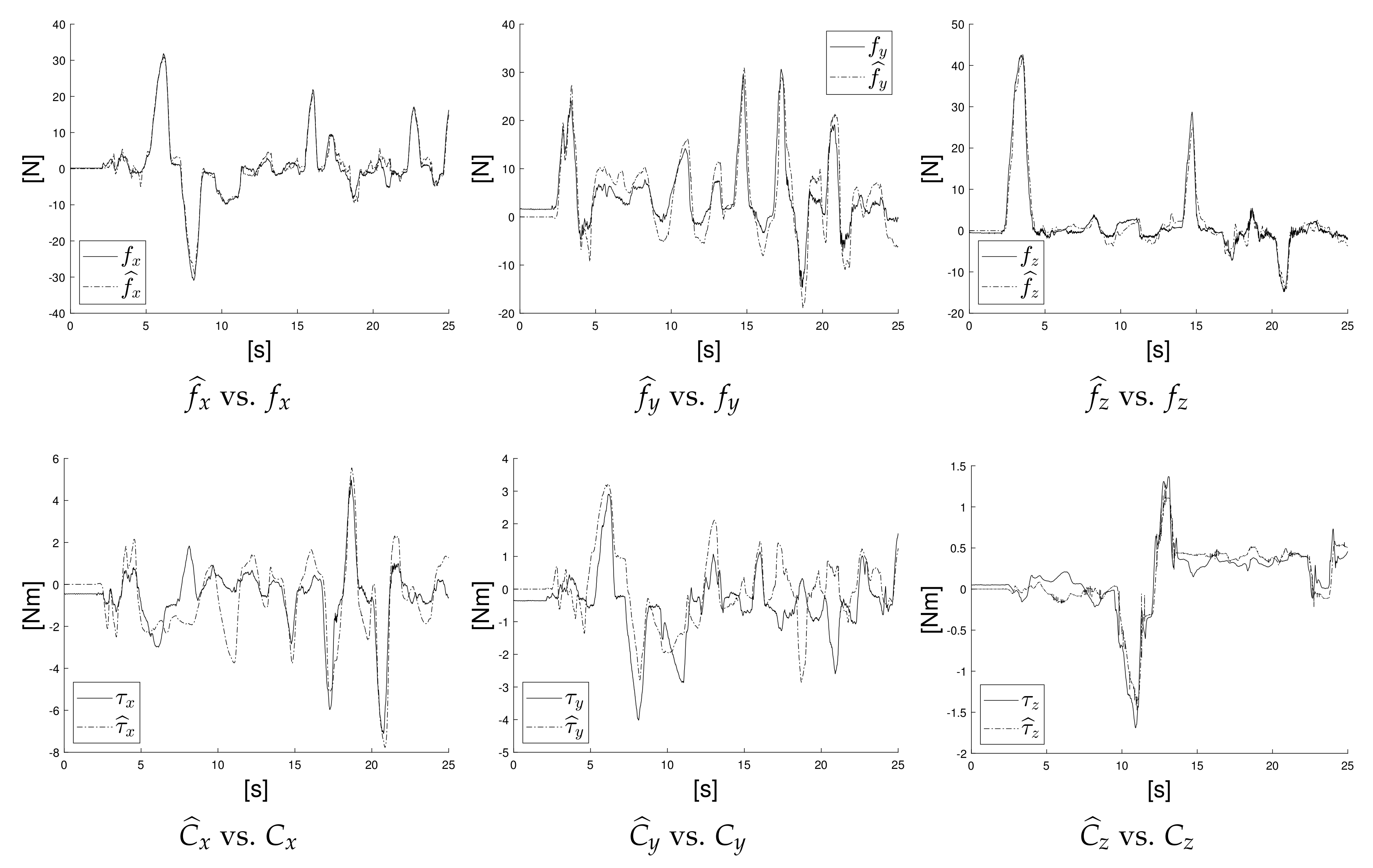
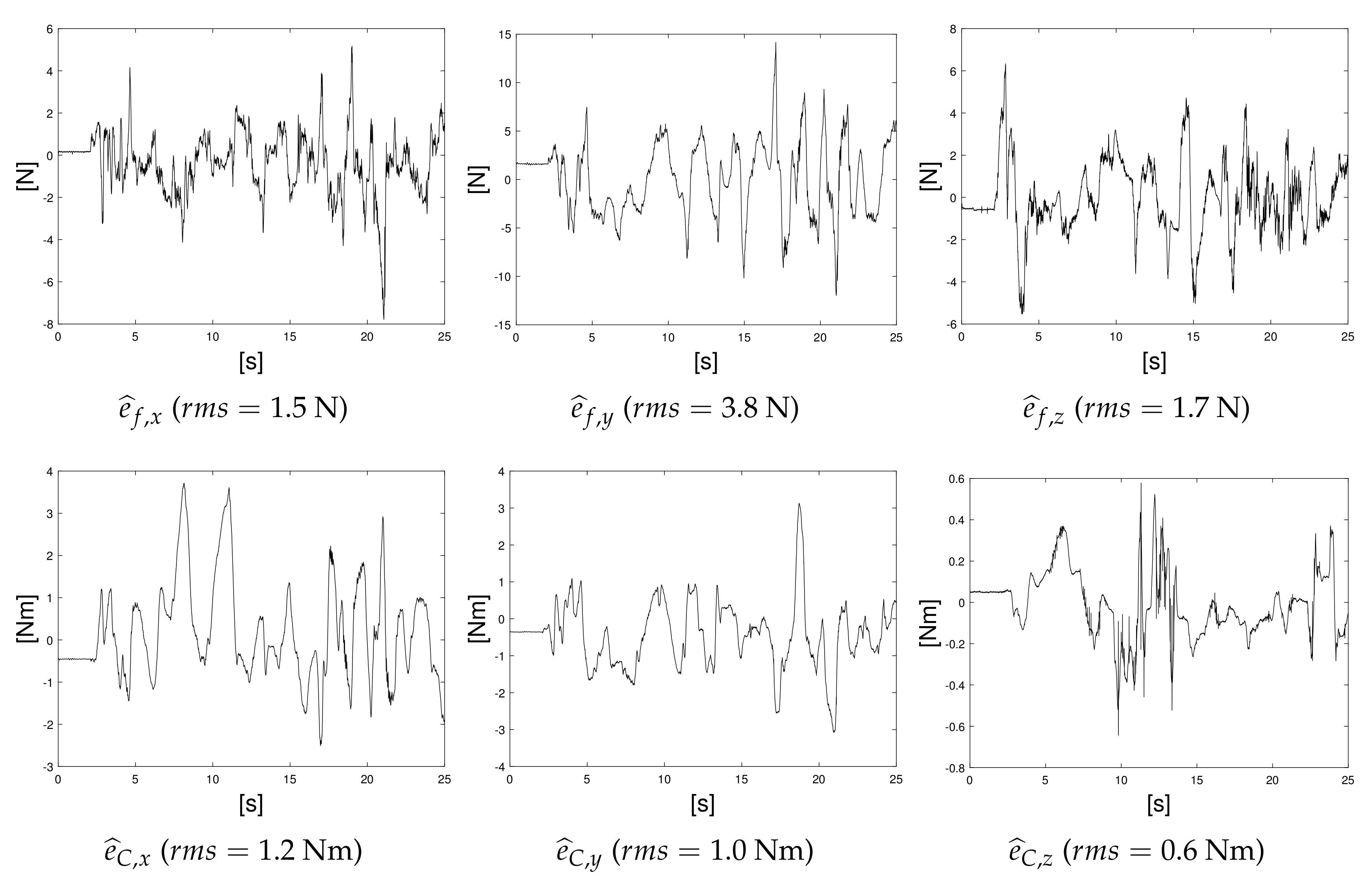
5. Experimental Results
5.1. Human–Robot Interaction
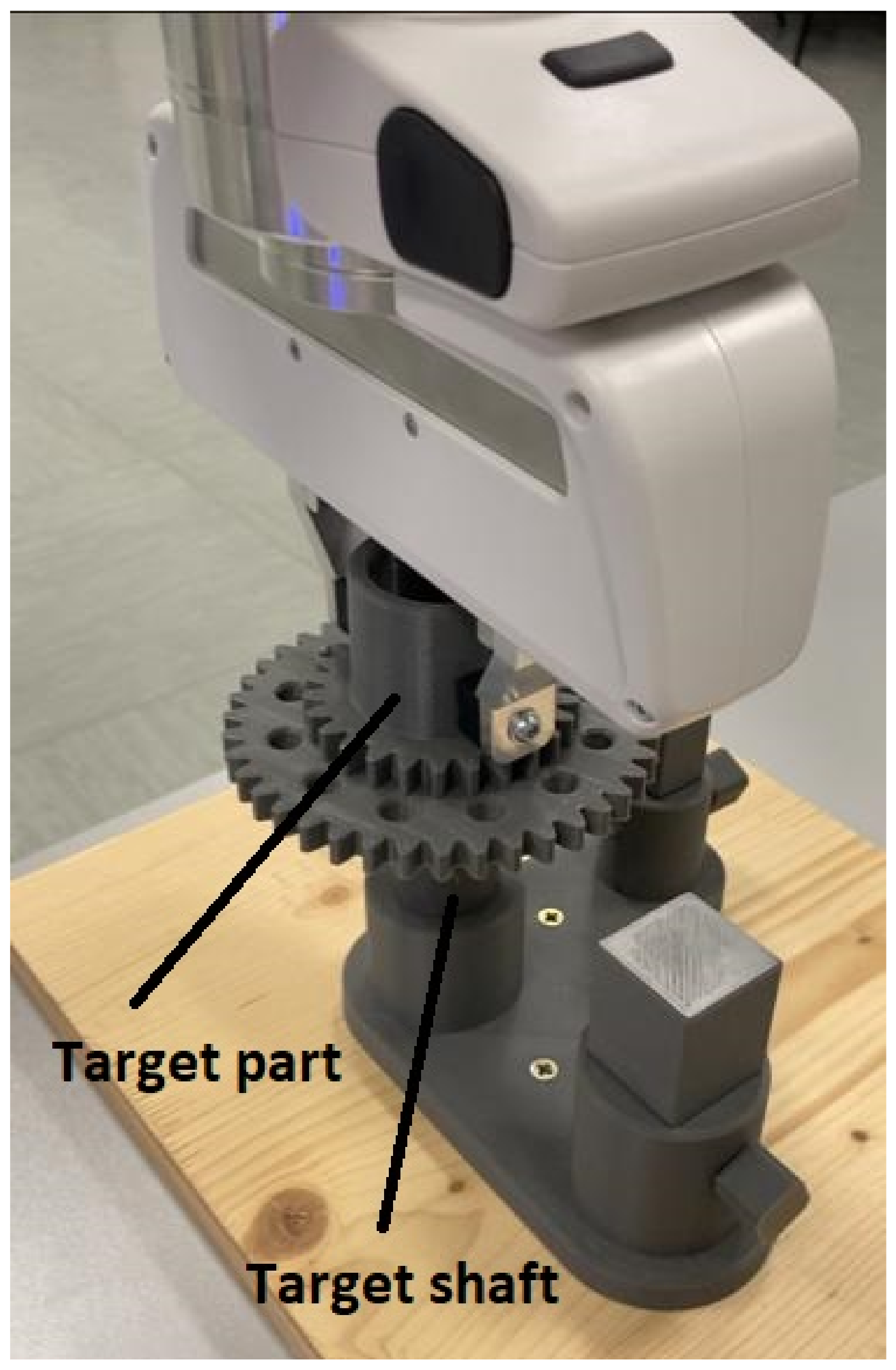
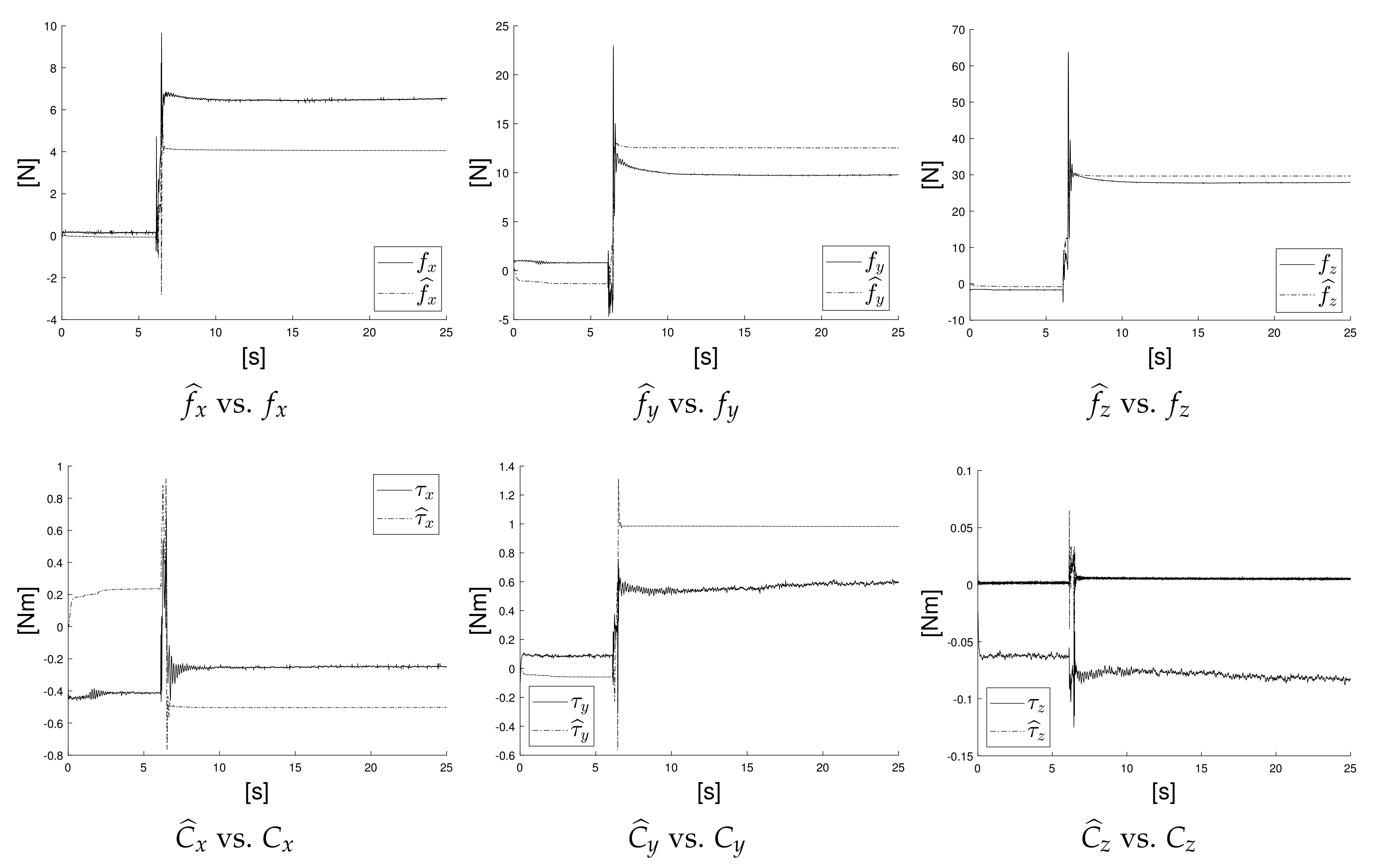
5.2. Assembly Task
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ben-Ari, M.; Mondada, F. Robots and their applications. In Elements of Robotics; Springer: Berlin, Germany, 2018; pp. 1–20. [Google Scholar]
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of Science Robotics. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef]
- Polverini, M.P.; Rossi, R.; Morandi, G.; Bascetta, L.; Zanchettin, A.M.; Rocco, P. Performance improvement of implicit integral robot force control through constraint-based optimization. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; pp. 3368–3373. [Google Scholar]
- Mohamed, Z.M. Flexible Manufacturing Systems: Planning Issues and Solutions; Taylor & Francis: Oxfordshire, UK, 2018. [Google Scholar]
- Dattaprasad, S.; Rao, Y.V. A Survey of Various Robot Learning Techniques. Int. J. Pure Appl. Math. 2018, 118, 3823–3831. [Google Scholar]
- Hogan, N. Impedance control: An approach to manipulation. In Proceedings of the 1984 American control conference, San Diego, CA, USA, 6–8 June 1984; pp. 304–313. [Google Scholar]
- Vukobratovic, M. Robot-environment dynamic interaction survey and future trends. J. Comput. Syst. Sci. Int. 2010, 49, 329–342. [Google Scholar] [CrossRef]
- Roveda, L.; Pedrocchi, N.; Tosatti, L.M. Exploiting impedance shaping approaches to overcome force overshoots in delicate interaction tasks. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416662771. [Google Scholar] [CrossRef]
- Roveda, L.; Pedrocchi, N.; Beschi, M.; Tosatti, L.M. High-accuracy robotized industrial assembly task control schema with force overshoots avoidance. Control. Eng. Pract. 2018, 71, 142–153. [Google Scholar] [CrossRef]
- Roveda, L. Adaptive interaction controller for compliant robot base applications. IEEE Access 2018, 7, 6553–6561. [Google Scholar] [CrossRef]
- Polverini, M.P.; Formentin, S.; Merzagora, L.; Rocco, P. Mixed Data-Driven and Model-Based Robot Implicit Force Control: A Hierarchical Approach. IEEE Trans. Control. Syst. Technol. 2019, 28, 1258–1271. [Google Scholar] [CrossRef]
- Janot, A.; Vandanjon, P.O.; Gautier, M. A generic instrumental variable approach for industrial robot identification. IEEE Trans. Control. Syst. Technol. 2013, 22, 132–145. [Google Scholar] [CrossRef]
- Chen, W.H.; Ballance, D.J.; Gawthrop, P.J.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef]
- Colomé, A.; Pardo, D.; Alenya, G.; Torras, C. External force estimation during compliant robot manipulation. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3535–3540. [Google Scholar]
- Hu, J.; Xiong, R. Contact force estimation for robot manipulator using semiparametric model and disturbance Kalman filter. IEEE Trans. Ind. Electron. 2017, 65, 3365–3375. [Google Scholar] [CrossRef]
- Peng, G.; Yang, C.; He, W.; Chen, C.L.P. Force Sensorless Admittance Control With Neural Learning for Robots With Actuator Saturation. IEEE Trans. Ind. Electron. 2020, 67, 3138–3148. [Google Scholar] [CrossRef]
- Van Damme, M.; Beyl, P.; Vanderborght, B.; Grosu, V.; Van Ham, R.; Vanderniepen, I.; Matthys, A.; Lefeber, D. Estimating robot end-effector force from noisy actuator torque measurements. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, Cina, 9–13 May 2011; pp. 1108–1113. [Google Scholar]
- Linderoth, M.; Stolt, A.; Robertsson, A.; Johansson, R. Robotic force estimation using motor torques and modeling of low velocity friction disturbances. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3550–3556. [Google Scholar]
- Villagrossi, E.; Simoni, L.; Beschi, M.; Pedrocchi, N.; Marini, A.; Tosatti, L.M.; Visioli, A. A virtual force sensor for interaction tasks with conventional industrial robots. Mechatronics 2018, 50, 78–86. [Google Scholar] [CrossRef]
- Sharifi, M.; Talebi, H.; Shafiee, M. Adaptive estimation of robot environmental force interacting with soft tissues. In Proceedings of the 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM), Tehran, Iran, 7–9 October 2015; pp. 371–376. [Google Scholar]
- Dong, A.; Du, Z.; Yan, Z. A sensorless interaction forces estimator for bilateral teleoperation system based on online sparse Gaussian process regression. Mech. Mach. Theory 2020, 143, 103620. [Google Scholar] [CrossRef]
- Magrini, E.; Flacco, F.; De Luca, A. Estimation of contact forces using a virtual force sensor. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2126–2133. [Google Scholar]
- Mendizabal, A.; Sznitman, R.; Cotin, S. Force classification during robotic interventions through simulation-trained neural networks. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 1601–1610. [Google Scholar] [CrossRef]
- Marban, A.; Srinivasan, V.; Samek, W.; Fernández, J.; Casals, A. A recurrent convolutional neural network approach for sensorless force estimation in robotic surgery. Biomed. Signal Process. Control. 2019, 50, 134–150. [Google Scholar] [CrossRef]
- Roveda, L.; Piga, D. Interaction Force Computation Exploiting Environment Stiffness Estimation for Sensorless Robot Applications. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Rome, Italy, 3–5 June 2020; pp. 360–363. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No. 00EX373), Lake Louise, AL, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Andrieu, C.; Doucet, A.; Holenstein, R. Particle markov chain monte carlo methods. J. R. Stat. Soc. Ser. 2010, 72, 269–342. [Google Scholar] [CrossRef]
- Chopin, N.; Jacob, P.E.; Papaspiliopoulos, O. SMC2: An efficient algorithm for sequential analysis of state space models. J. R. Stat. Soc. Ser. 2013, 75, 397–426. [Google Scholar] [CrossRef]
- Urteaga, I.; Bugallo, M.F.; Djurić, P.M. Sequential Monte Carlo methods under model uncertainty. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; pp. 1–5. [Google Scholar]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Siciliano, B.; Villani, L. Robot Force Control, 1st ed.; Kluwer Academic Publishers: Norwell, MA, USA, 2000. [Google Scholar]
- Chang, P.R.; Lee, C.G. Residue arithmetic VLSI array architecture for manipulator pseudo-inverse Jacobian computation. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 297–302. [Google Scholar]
- Pedrocchi, N.; Villagrossi, E.; Vicentini, F.; Molinari Tosatti, L. On robot dynamic model identification through sub-workspace evolved trajectories for optimal torque estimation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 2370–2376. [Google Scholar]
- Roveda, L.; Iannacci, N.; Tosatti, L.M. Discrete-time formulation for optimal impact control in interaction tasks. J. Intell. Robot. Syst. 2018, 90, 407–417. [Google Scholar] [CrossRef]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB® Second, Completely Revised; Springer: Berlin, Germany, 2017; Volume 118. [Google Scholar]
- Gaz, C.; Cognetti, M.; Oliva, A.; Giordano, P.R.; De Luca, A. Dynamic identification of the franka emika panda robot with retrieval of feasible parameters using penalty-based optimization. IEEE Robot. Autom. Lett. 2019, 4, 4147–4154. [Google Scholar] [CrossRef]
- Roveda, L.; Pallucca, G.; Pedrocchi, N.; Braghin, F.; Tosatti, L.M. Iterative learning procedure with reinforcement for high-accuracy force tracking in robotized tasks. IEEE Trans. Ind. Inform. 2017, 14, 1753–1763. [Google Scholar] [CrossRef]
- Çimen, T. Approximate nonlinear optimal SDRE tracking control. In Proceedings of the 17th IFAC Symp. Automatic Control in Aerospace, Toulouse, France, 25–29 June 2007; pp. 147–152. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roveda, L.; Bussolan, A.; Braghin, F.; Piga, D. 6D Virtual Sensor for Wrench Estimation in Robotized Interaction Tasks Exploiting Extended Kalman Filter. Machines 2020, 8, 67. https://doi.org/10.3390/machines8040067
Roveda L, Bussolan A, Braghin F, Piga D. 6D Virtual Sensor for Wrench Estimation in Robotized Interaction Tasks Exploiting Extended Kalman Filter. Machines. 2020; 8(4):67. https://doi.org/10.3390/machines8040067
Chicago/Turabian StyleRoveda, Loris, Andrea Bussolan, Francesco Braghin, and Dario Piga. 2020. "6D Virtual Sensor for Wrench Estimation in Robotized Interaction Tasks Exploiting Extended Kalman Filter" Machines 8, no. 4: 67. https://doi.org/10.3390/machines8040067
APA StyleRoveda, L., Bussolan, A., Braghin, F., & Piga, D. (2020). 6D Virtual Sensor for Wrench Estimation in Robotized Interaction Tasks Exploiting Extended Kalman Filter. Machines, 8(4), 67. https://doi.org/10.3390/machines8040067