Field Programmable Gate Array-Based Linear Shaft Motor Drive System Design in Terms of the Trapezoidal Velocity Profile Consideration

Abstract
1. Introduction
2. The System Architecture and Modeling
2.1. Transformation Matrix of the Vector Control
2.2. Mathematical Model of Linear Shaft Motor
2.3. Overall System Architecture
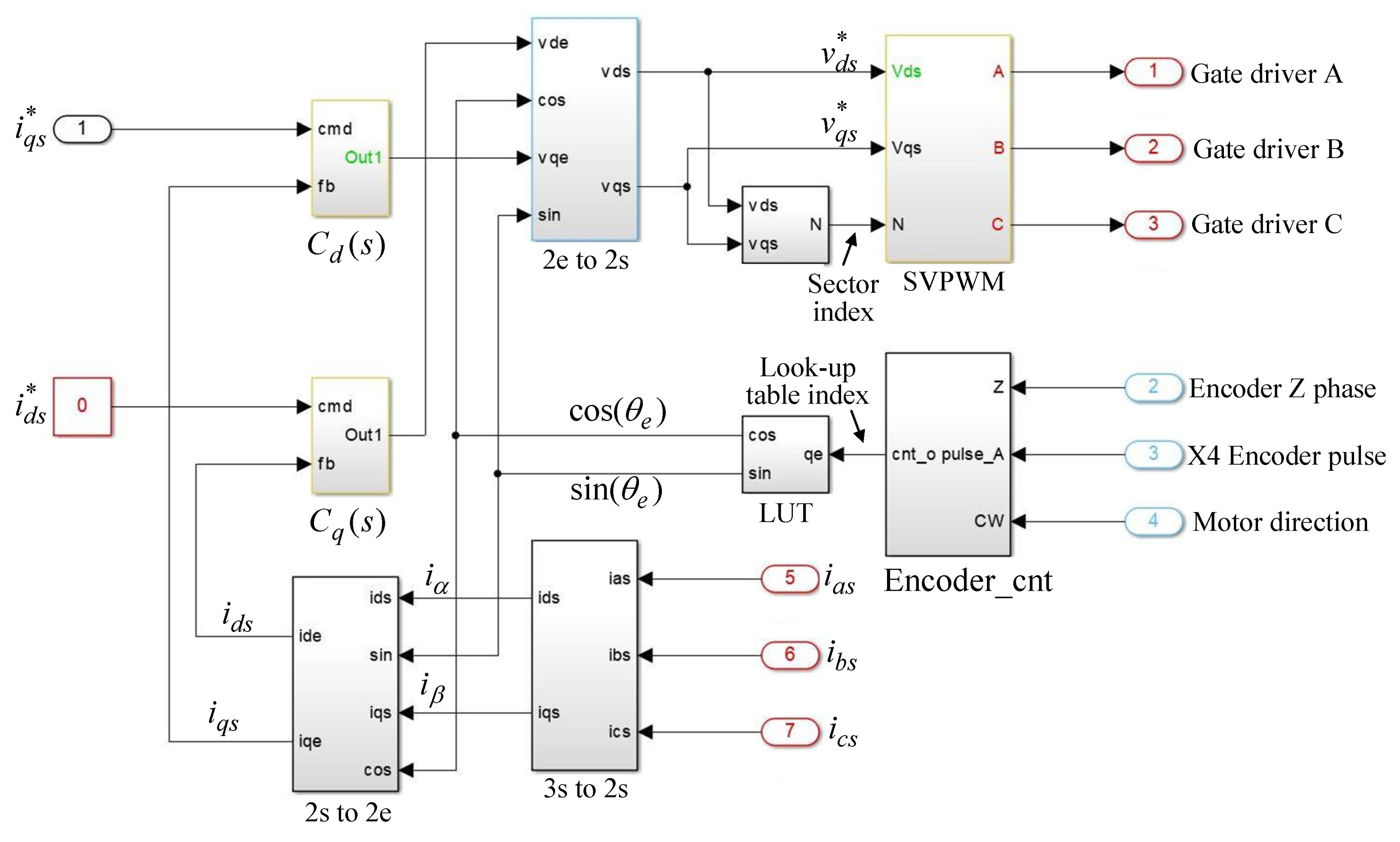
2.4. Digital System Architecture of the Vector Control
2.5. Digital PI Controller
3. The Functional Simulation and Experiments
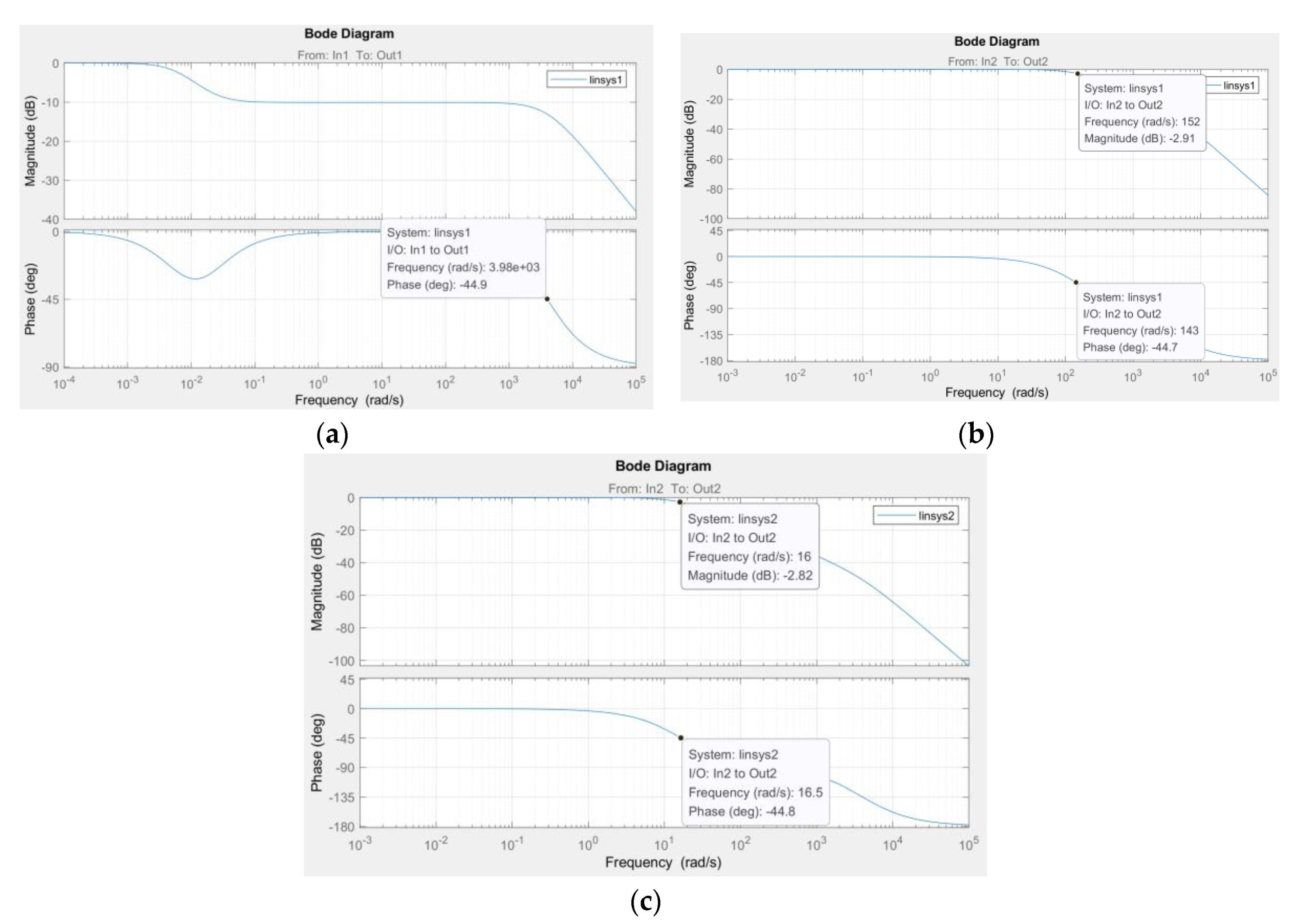
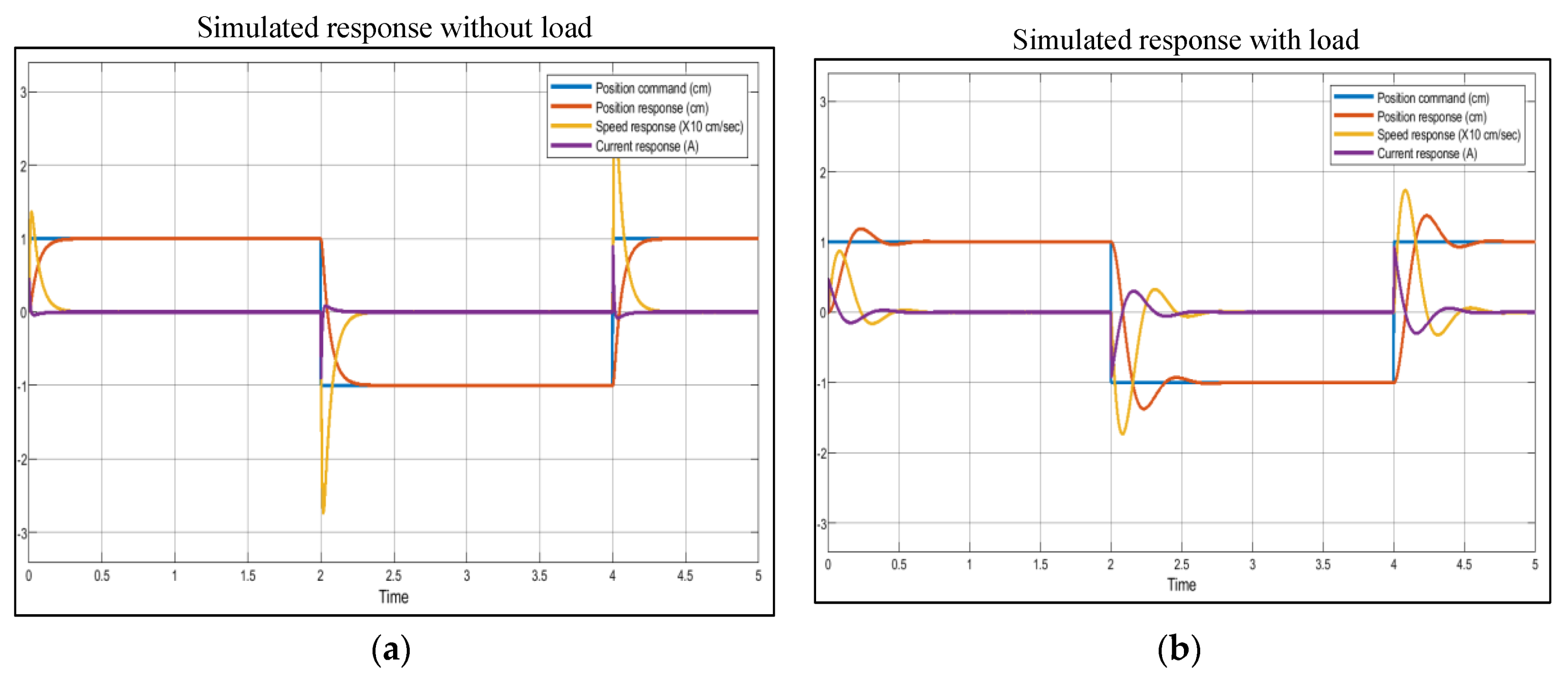
3.1. Simulation Results
3.2. Experimental System Setup and Functional Evaluation Results
4. The Trapezoidal Speed Profile Control
4.1. The Generation of Trapezoidal Speed Command Pulse
4.2. The Simulated Results and Problems
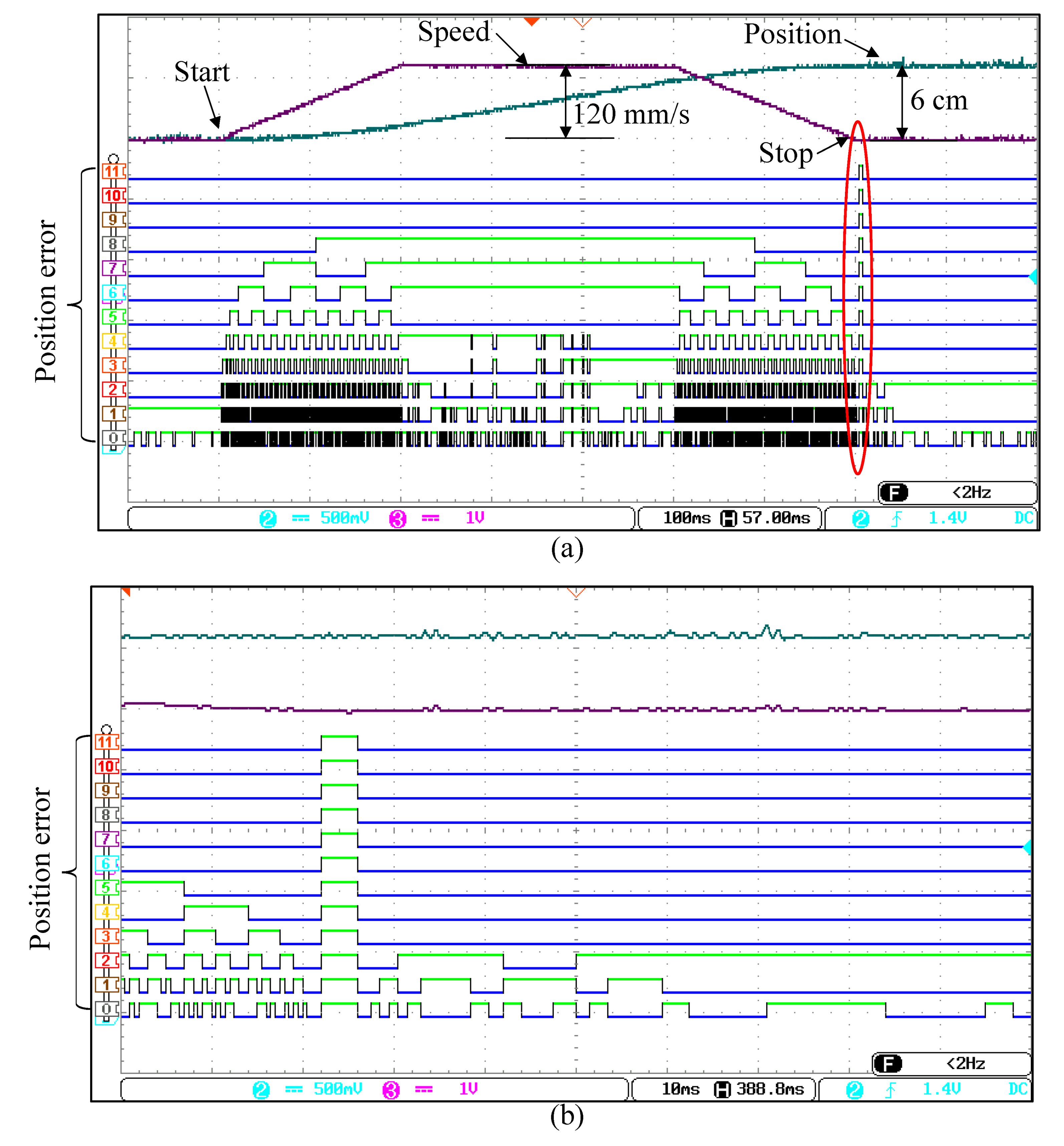
4.3. The Experimental Results with Switching Control
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Suzuki, A.; Yoshida, T. Position Detection for Shaft-Type Linear Motor by Measurement of Shaft Surface Magnetic Flux. In Proceedings of the International Conference on Electrical Machines and Systems, Tokyo, Japan, 15–18 November 2009. [Google Scholar]
- Kung, Y.S.; Huang, C.C.; Huang, L.C. FPGA-Based Motion Control IC for Linear Motor Drive X-Y Table Using Adaptive Fuzzy Control. Available online: https://pdfs.semanticscholar.org/ed91/6cc7fb94a8a7c08e06ac6e701168436c5dc5.pdf (accessed on 4 September 2019).
- Cao, R.; Cheng, M.; Mi, C.; Hua, W.; Wang, X.; Zhao, W. Modeling of a Complementary and Modular Linear Flux-Switching Permanent Magnet Motor for Urban Rail Transit Applications. IEEE Trans. Energy Convers. 2012, 27, 489–497. [Google Scholar] [CrossRef]
- Hussain, H.A.; Toliyat, H.A. Field Oriented Control of Tubular PM Linear Motor Using Linear Hall Effect Sensors. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Anacapri, Italy, 22–24 June 2016. [Google Scholar]
- Xing, F.; Kou, B.; Zhang, L.; Wang, T.; Zhang, C. Analysis and Design of a Maglev Permanent Magnet Synchronous Linear Motor to Reduce Additional Torque in dq Current Control. Energies 2018, 11, 556. [Google Scholar] [CrossRef]
- Zhang, B.; Qi, R.; Lin, H.; Mwaniki, J. A Model for Analyzing a Five-Phase Fractional-Slot Permanent Magnet Tubular Linear Motor with Modified Winding Function Approach. J. Electr. Comput Eng. 2016, 2016, 1–13. [Google Scholar] [CrossRef]
- Falkowski, K.; Henzel, M.; Mazurek, P. Mathematical analysis of tubular linear motor. Pomiary Autom. Robot. 2013, 17, 508–512. [Google Scholar]
- Díaz Pérez, L.C.; Torralba Gracia, M.; Albajez García, J.A.; Yagüe Fabra, J.A. One-Dimensional Control System for a Linear Motor of a Two-Dimensional Nanopositioning Stage Using Commercial Control Hardware. Micromachines 2018, 9, 421. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Chen, X.; Du, H.; Bai, S. Position Tracking Control for Permanent Magnet Linear Motor via Continuous-Time Fast Terminal Sliding Mode Control. J. Control Sci. Eng. 2018, 2018, 1–6. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, M.; Zhang, B. Speed Control of Complementary and Modular Linear Flux-Switching Permanent-Magnet Motor. IEEE Trans. Ind. Electron. 2015, 62, 4056–4064. [Google Scholar] [CrossRef]
- Ting, C.S.; Chang, Y.N.; Shi, B.W.; Lieu, J.F. Adaptive backstepping control for permanent magnet linear synchronous motor servo drive. IET Electr. Power Appl. 2015, 9, 265–279. [Google Scholar] [CrossRef]
- Chaurasiya, B.R.; Patil, M.D.; Shah, D.K.; Kadam, A.V. FPGA Implementation of SVPWM Control Technique for Three Phase Induction Motor Drive Using Fixed Point Realization. In Proceedings of the 2014 International Conference on Circuits, Systems, Communication and Information Technology Applications, Mumbai, India, 4–5 April 2014; pp. 93–98. [Google Scholar]
- Horvat, R.; Jezernik, K.; Čurkovič, M. An Event-Driven Approach to the Current Control of a BLDC Motor Using FPGA. IEEE Trans. Ind. Electron. 2014, 61, 3719–3726. [Google Scholar] [CrossRef]
- Ricci, S.; Meacci, V. Simple Torque Control Method for Hybrid Stepper Motors Implemented in FPGA. Electronics 2018, 7, 242. [Google Scholar] [CrossRef]
- Díaz-Pérez, L.C.; Albajez, J.A.; Torralba, M.; Yagüe-Fabra, J.A. Vector Control Strategy for Halbach Linear Motor Implemented in a Commercial Control Hardware. Electronics 2018, 7, 232. [Google Scholar] [CrossRef]
- Lai, C.K.; Ciou, J.S.; Tsai, C.C. The Modelling, Simulation and FPGA-Based Implementation for Stepper Motor Wide Range Speed Closed-Loop Drive System Design. Machines 2018, 6, 56. [Google Scholar] [CrossRef]
- Madrin, F.P.; Hariadi, F.I.; Sasongko, A. Design and Implementation of FPGA-based Control for Linear and Circular Motion Interpolator of PCB CNC-Milling and Drilling Machine. In Proceedings of the 2017 International Symposium on Electronics and Smart Device, Yogyakarta, Indonesia, 17–19 October 2017. [Google Scholar]
- Zhang, P.; Mills, A.; Zambreno, J.; Jones, P.H. A Software Configurable and Parallelized Coprocessor Architecture for LQR Control. In Proceedings of the 2015 International Conference on ReConFigurable Computing and FPGAs, Mexico City, Mexico, 7–9 December 2015. [Google Scholar]
- Chen, J.H.; Yau, H.T.; Hung, T.H. Design and implementation of FPGA-based Taguchi-chaos-PSO sun tracking systems. Mechatronics 2015, 25, 55–64. [Google Scholar] [CrossRef]
- Chiang, H.H.; Hsu, K.C.; Li, I.H. Optimized Adaptive Motion Control Through an SoPC Implementation for Linear Induction Motor Drives. IEEE/ASME Trans. Mechatron. 2015, 20, 348–360. [Google Scholar] [CrossRef]
- Perng, S.S.; Wu, T.F.; Jiang, M.C.; Li, C.W.; Jiang, Y.R. Based on FPGA Method to Design and Implement for Induction Motors Drive System. J. Comput. 2017, 28, 205–214. [Google Scholar]
- Nicolas-Apruzzese, J.; Lupon, E.; Busquets-Monge, S.; Conesa, A.; Bordonau, J.; García-Rojas, G. FPGA-Based Controller for a Permanent-Magnet Synchronous Motor Drive Based on a Four-Level Active-Clamped DC-AC Converter. Energies 2018, 11, 2639. [Google Scholar] [CrossRef]
- Tavana, N.R.; Dinavahi, V. Real-Time FPGA-Based Analytical Space Harmonic Model of Permanent Magnet Machines for Hardware-in-the-Loop Simulation. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef]
- Diao, L.; Tang, J.; Loh, P.C.; Yin, S.; Wang, L.; Liu, Z. An Efficient DSP–FPGA-Based Implementation of Hybrid PWM for Electric Rail Traction Induction Motor Control. IEEE Trans. Power Electron. 2018, 33, 3276–3288. [Google Scholar] [CrossRef]
- Shyu, K.K.; Lai, C.K. Incremental Motion Control of Synchronous Reluctance Motor via Multisegment Sliding Mode Control Method. IEEE Trans. Control Syst. Technol. 2002, 10, 169–176. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Value |
|---|---|
| Coil resistance (R) | 33 Ω |
| Coil inductance (L) | 12 mH |
| Counter EMF | 8.1 V/m/s |
| Continuous Current | 0.6 A rms |
| Force Constant | 24 N/A rms |
| Continuous Force | 15 N |
| Peak Force | 60 N |
| Magnetic Pitch (North to North) | 60 mm |
| Forcer + Platform of payload | 0.5 kg |
| Name | Sign Bit | Integer Bit | Fraction Bit | Remark |
|---|---|---|---|---|
| 1 | 16 | 15 | proportional gain | |
| 1 | 16 | 15 | integral gain | |
| 1 | 31 | 0 | displacement | |
| 1 | 16 | 15 | speed | |
| 1 | 16 | 15 | d-axis current | |
| 1 | 16 | 15 | q-axis current | |
| 1 | 16 | 15 | d-axis voltage | |
| 1 | 16 | 15 | q-axis voltage | |
| 1 | 3 | 28 | sine function | |
| 1 | 3 | 28 | cosine function |
| Loop | ||
|---|---|---|
| Position control loop | 20 | 0.3 |
| Speed control loop | 10 | 0.3 |
| d-axis control loop | 15 | 0.3125 |
| q-axis control loop | 15 | 0.3125 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, C.-K.; Lai, H.-Y.; Tang, Y.-X.; Chang, E.-S. Field Programmable Gate Array-Based Linear Shaft Motor Drive System Design in Terms of the Trapezoidal Velocity Profile Consideration. Machines 2019, 7, 59. https://doi.org/10.3390/machines7030059
Lai C-K, Lai H-Y, Tang Y-X, Chang E-S. Field Programmable Gate Array-Based Linear Shaft Motor Drive System Design in Terms of the Trapezoidal Velocity Profile Consideration. Machines. 2019; 7(3):59. https://doi.org/10.3390/machines7030059
Chicago/Turabian StyleLai, Chiu-Keng, Hsiang-Yueh Lai, Yong-Xiang Tang, and En-Shen Chang. 2019. "Field Programmable Gate Array-Based Linear Shaft Motor Drive System Design in Terms of the Trapezoidal Velocity Profile Consideration" Machines 7, no. 3: 59. https://doi.org/10.3390/machines7030059
APA StyleLai, C.-K., Lai, H.-Y., Tang, Y.-X., & Chang, E.-S. (2019). Field Programmable Gate Array-Based Linear Shaft Motor Drive System Design in Terms of the Trapezoidal Velocity Profile Consideration. Machines, 7(3), 59. https://doi.org/10.3390/machines7030059