Abstract
The primary purpose of this work is to organize, in the best possible way, the design of an ecological transport vehicle, using an advanced design methodology, namely design for six sigma (DFSS). The DFSS is indeed a design approach, able to implement, in a logical and integrated way, other advanced methodologies of systematic design, such as quality function deployment (QFD), TRIZ (in Russian, Teorija Rešenija Izobretatel’skich Zadač), benchmarking, top-flop analysis and others, in order to propose design solutions oriented both to quality and innovation, for satisfying customers. The above described has been demonstrated through the application of DFSS to a case study in which the set up phase of an industrial project was completed, without having overlooked any aspect useful for obtaining a new attractive product. The case study concerns the application of DFSS to a new low-polluting motorcycle. At the end of the work, the designer obtained the achievement of the conceptual project.
1. Introduction
Innovation can simply be defined as “a new idea, a new tool, or a new method”. Innovation concerns a process or product that guarantees greater results or benefits, thus bringing social progress, even if sometimes it is not always effective and better than what it is going to innovate.
The aim of this paper is to suggest a repeatable structure in order to organize complex projects, mostly during the set up phase of design; using Design for Six Sigma (DFSS) as an empty box to be filled in, we can rely on a road map that can orient the designer during the difficult path of its work. DFSS and its steps, i.e., define, measure, analyze, design and validate, can be considered just like a compass and template: It indicates the right way to go and the “to do” list to be done. Moreover, in the present work, the above-mentioned methodology is applied to a quite articulated case study, which is the design of an innovative electric motorcycle. It was chosen because the development of eco-sustainable mobility is one of the main objectives of the automotive industry and the power supply is one of the most important research points in the transportation field.
Since Design for Six Sigma (DFSS) [1,2,3,4,5] is a method used to develop new products in a new systematic way, the present work demonstrates how it can be applied to a quite complex case study, just like an electric motorbike, because it is able to achieve the determination of customer needs to transform them into the quality and innovative solution product (Figure 1).

Figure 1.
Structure of Design for Six Sigma (DFSS): Define + Measure + Analyze + Design + Verify.
Furthermore, the development of the data flow, managed by the method, is divided into five phases, in the order we will have: Define, measure, analyze, design, verify. Each of these stages will be analyzed in the following chapters, together with a market analysis of current electric motorcycles [1,2].
2. Define
For the design of an electric motorcycle, it is first of all necessary to clarify the task, i.e., a data collection and selection phase, since the result of a market analysis does not contain all the information necessary to start the design phase.
In order to proceed, a method will be used that will lend itself to the planning of each phase, then used on different levels. This method, of Japanese origin, is indicated by the name QFD (quality function deployment). It was successfully developed and used in Japan in the early 1970s and subsequently developed in the United States since the early 1980s by the American Supplier Institute (ASI).
In other words, it can be defined as a tool for organizing the flow of information, as an alternative to others, within a global systematic design strategy. Its role, therefore, is limited to that of an aid tool for performing the correct product planning and clarification of the task.
The method starts by correctly identifying the needs of the product user.
Through the first phase, here referred to as define, the following purposes are proposed: To document the environment where the product is used and to explain the customer’s needs.
Afterwards, the importance of the determined needs will be evaluated and a response will be given through the relation matrices, in the measure and analyze phases.
2.1. Documentation on the Environment of Use
In order to carry out this phase, a series of questions are used to explain the data of the client, until reaching a complete list of requirements through a reformulation of the answers, so that only one concept is defined.
In this case, the questions were asked in order to receive the consumer’s main needs quickly and immediately [6].
- ⚬
- Who: Who uses the product?Two-wheel enthusiasts and speed lovers who pay attention to the environment.
- ⚬
- What: What are the uses of the product?A means of transport for short and long routes, particularly agile, fast, and of limited size.
- ⚬
- Where: Where is the product used?It is mainly used along roads and urban and extra-urban roads.
- ⚬
- When: When is it used?Mainly in spring and summer, its use is strongly linked to favorable weather conditions.
- ⚬
- Why: Why was the product chosen / why could it be chosen?It can be chosen because of its aesthetic design, performance, driving sensations, price, or environmental impact, and management and maintenance costs.
- ⚬
- How: How is the product used?The product is driven directly by its user and mainly used for the fun and pleasure provided by driving these two-wheeled vehicles, as well as by logistical needs.
2.2. Customer Needs
Once the information was obtained from the answers of the documentation phase, through an evaluation of these data, it was possible to group together and summarize the concepts, ideas, and perceptions in the form of product requirements from a customer perspective.
In particular, the following requirements were obtained as extreme synthesis of the above-mentioned answers to the “six questions” performed in the “define phase”. In fact, the six questions must stimulate a broad “brain storming” that can give as many exhaustive answers as possible. The answers must have an extended form, but then they must summarize in a single-word concept the single requirement. So here below we can list all the “single-word requirements” obtained by the six question analysis above performed:
High autonomy
The use of this product as a means of transport obviously determines the need for an acceptable range in order to be inserted as an alternative to fossil fuel vehicles. The use of lithium ion (Li-ion) batteries has certainly brought advantages on weight and bulk, allowing a margin of growth for this parameter. Moreover, during the planning of long journeys, it is also necessary to program the possible presence of service stations with charging stations for electric vehicles.
Lightness
The lightness in a two-wheeled vehicle is one of the factors determined for performance and autonomy, moreover, a lighter vehicle is easier and easier to drive. This parameter is linked both to performance characteristics and driving safety, allowing better control for the driver.
Performances
One of the first associations that is made, thinking of a motorcycle, is certainly that of a fast and powerful vehicle. Furthermore, it is considered one of the main factors that pushes an enthusiast to choose a particular model over another. Finally, the use of electric motors allows more constant and higher torque values compared to petrol engines.
Attractive design
As is well known, fashion and aesthetic characteristics largely influence the purchase of products on the market. Being a motorcycle, a product used in public places, a more or less attractive design can represent a way to express the personality of its user.
Driving comfort
In the case of driving for long distances, it is also necessary to consider the stresses and strains on the driver. In fact, there are various factors that influence this parameter, such as ergonomics, the use of particular suspensions, or the position and shape of the saddle. This can determine the choice of a particular model based on the use the customer requires, for example, if there is a need to travel long distances, a cruiser motorcycle is preferable to a motard.
Low price
The growth of electric vehicle sales in Italy is one of the slowest in the continent, compared to the rest of the world where the sale of zero-emission engines produces positive numbers. The main obstacle to this new form of mobility is certainly the high cost compared to petrol counterparts. The introduction of incentives by the state, however, could facilitate the purchase of electric vehicles.
Reduction of recharge times
A critical aspect is security linked to recharging times and the presence of infrastructures for charging electric vehicles. In Italy, charging stations are almost all concentrated in the northern regions, while other areas are practically without them. On this issue, Enel launched the e-mobility program, which provides for an investment of up to 300 million Euros to install 14,000 charging stations throughout Italy by 2022, although 7000 should be operational by 2020. However, even in the most favorable cases, the charging times at the service stations are about 3 hours and it can be inconvenient for a customer to be tied to much higher parking times, compared to fossil fuel vehicles.
3. Measure
Once the customer’s requests are established in the form of individual concepts, it is necessary to establish the importance of these parameters and the degree of independence between them.
To do this we used symmetric matrices, which were compiled with specific values, established by the QFD method [2].
3.1. Matrix of Relative Importance
This matrix (Table 1) was used to determine which parameter had greater relevance than the others. In particular, one wonders if the element of the row is more important than that of the column.

Table 1.
Relative importance matrix.
According to QFD methodology, as defined by its inventors (Akao, Mizuno, and Furukawa of JUSE—Union of Japanese Scientists and Engineers), the following values are used:
- 1 = The element of the row has the same importance as the column element.
- 0 = The element of the row has less importance than the column element.
- 2 = The row element has more importance than the column element.
The choice to give the votes in 1, 0, or 2 was up to a group of students who participated in the evaluation set up analysis of the present project.
In particular, the value obtained from the sum per row classifies the absolute importance of the quantities, compared in a relative way to two by two.
The most important parameters are highlighted in yellow, which are used for subsequent analyses.
Summarizing what was obtained by the first QFD analysis, related to relative importance matrix above, it was affirmed that the first targets for the designer can be considered (highlighted in yellow in Table 1); high autonomy, low charge times, lightness, price and performances were considered the most important requirements by the customers.
So, the above-mentioned characteristics represent the first starting point to design.
3.2. Independence Matrix
It is used to establish the possible dependency relations between the different characteristics to be analyzed (Table 2).
Table 2.
Independence matrix.
To proceed with the compilation, the following question is proposed: How does the element on the lines depend on the elements in the columns?
Therefore, we indicate through the values a weak, medium, and strong dependence, quantified through the values 1, 3, and 9. If there is no relationship between the two, the box is left empty, equivalent to a value equal to 0.
Also in this table, the sum value is calculated along the rows and columns to determine which parameters are more independent.
In particular, the sum of the rows defines how much a feature is dependent on the others, while the sum of the columns identifies the most independent parameters.
Finally, the features useful for the subsequent treatments, i.e., those relating to more independent values, are highlighted in yellow.
As in the case of relative importance matrix, the authors summarize what is obtained also by the second QFD analysis, related to the independence matrix above (Table 2); it is affirmed that the second targets for the designer can be considered (highlighted in yellow in Table 2) price, lightness, high autonomy, performances and low charge times, because they are considered the most independent requirements by the customers. It is important to choose the most independent requirements because they are characteristics that don’t derive from other ones; so, if we did not focus attention in designing them, they would not be available in the project. Differently, the dependent requirements (lefts side total column, Table 2) were not relevant to be chosen; in fact, they became available in the project because they depended on independent requirements.
Curiously, in this case, relative importance matrix analysis and independence matrix analysis give the same results, i.e., the first five requirements found are the same for both the evaluations.
So, the above-mentioned characteristics represent, not only the first starting point, but the main starting points to design.
3.3. Benchmarking
In the design of an innovative electric motorcycle it is necessary to be aware of the current market offers, in order to analyze and compare the various technical specifications and create a product that can improve the current landscape.
To do this, the top-flop analysis tool was used, which allowed for a quick qualitative comparison between a series of objects on a defined number of parameters for the evaluation. In this way, it was possible to indicate the best and worst values, for each specification, among the various brands and models, and to establish what is innovative and what is not. In this way, it was possible to obtain the parameters from which to improve the current choices available and bring an innovative product to the market.
The motorcycles featured in the comparison correspond to existing models, despite the fact that the market in this category is still under development. A brief analysis of the main brands and their products follows.
Energica Motor Company S.p.A. is the first manufacturer of supersport electric motorcycles Made in Italy. The company was born from the experience of the CRP Group, a center of excellence for cutting-edge technologies, in Modena, the “Italian Motor Valley.” Energica uses some of the most brilliant minds of Formula 1, only highly qualified figures assemble its models.
• Energica Ego: With a 107 kW synchronous oil-cooled permanent-magnet electric motor (approximately 145 hp) we describe a motorcycle that manages to enter the supersport market. Powered by an 11.7 kWh lithium polymer battery, it guarantees a range of about 200 km.
Zero Motorcycles was born as an ambitious idea in a garage in Santa Cruz, California, which grew to become an internationally renowned motorcycle company. It represents constant innovation applied to the world of motorcycles. Combining the best features of traditional motorcycles with the most sophisticated and cutting-edge technology, each model is designed to benefit the most from the revolutionary Z-Force ™ electric powertrain and features a rigid aluminum frame, normally used in the aviation industry, specially developed to contain weight.
• Zero SR ZF14.4: It is currently the electric bike with the greatest autonomy in the world. The heart of the Zero SR is the battery with the highest power and energy density of the electric mobility sector. The greater the battery capacity, up to 14.4 kWh, the greater the autonomy. It mounts a passive air-cooled brushless motor, with high efficiency and a permanent internal magnet, resistant to high temperatures and radial flow.
Brammo Inc. is an American manufacturer of powertrains for electric vehicles based in Ashland, Oregon, United States. The interest in the world of motorsport was born while the founder of the company was looking for a supercar in which he could enter comfortably. Thus, in September 2002 the trademark “Brammo Motorsports” was registered.
• Brammo Empulse: In 2010, after several years of producing electric supercars and motorcycles, such as the Enertia GT and the Enertia Powercycle, Brammo introduced the Empulse model. It is an electric water-cooled motorcycle that can guarantee a speed of over 150 km/h and up to 185 km of autonomy.
Italian Volt is an Italian manufacturer of electric motorcycles with over 50 years experience in the motorcycle industry. The objectives it sets are to maintain excellence and innovation, changing the experience of the means of transport. Italian Volt also tries to offer the best electric motorcycle possible by combining complete customization with Italian design and sustainability.
• Lacama: It is a high performance electric roadster whose name is inspired by a chameleon. In fact, it is completely customizable both aesthetically and in its configurations: Its maximum speed is limited to 180 km/h and can guarantee a range of up to 200 km.
Lito Green Motion is a Canadian company that aims to become the first global manufacturer of a luxury and 100% electric motorcycle, made in Quebec.
• Sora: The Sora model represents the beginning of the company after many years of development. It is an electric bike that does not hide its sporting soul, equipped with an asynchronous AC electric motor of 42 kW and maximum speed up to 190 km/h. Made using high quality components and materials and destined for luxury markets.
Lightning Motors Corp. has been building and developing two-wheeled electric vehicles for more than 6 years. Its mission is to design electric bikes with superior efficiency, performance, and price compared to petrol alternatives.
• LS-218: Lighting Motors has designed and produced this model to change the idea of all skeptics about the performance of an electric motorcycle. At the moment, the company declares that the Ls-218 is the fastest production bike in the world, also counting petrol vehicles, capable of reaching speeds of 350 km/h, with a permanent magnet engine of more than 150 kW.
Johammer e-mobility was born in 2014, in Austria, out of the idea of producing electric motorcycles of unconventional and futuristic design.
• J1: It represents the unique concept proposed by the company and integrates an innovative design with original choices. It is a bike that makes comfort and driving comfort as its strengths, designed to enjoy a journey and boasts of being the first standard electric motorcycle to have reached its 200 km range.
3.4. Top-Flop Analysis
Once the analysis of the various competitors was completed, the data available with the technical specifications of each model were analyzed. In this way, therefore, it was possible to proceed with the compilation of the table relating to the top-flop analysis (Table 3) [3].
Table 3.
Bench marking and top-flop analysis table.
The comparison between the various motorcycles took place on the following parameters:
- Wheelbase, width, seat height and weight, related to the aesthetic and dimensional characteristics.
- Power, torque, maximum speed, acceleration, characterizing the performance of the bike.
- Autonomy, battery and charging time to highlight the characteristics of an electric vehicle.
- Price, as one of the determining factors in the spread of this market.
The best values for each feature were highlighted in green, while the worst values were shown in red. Then a balance was made to calculate the delta, that is the difference, between the positive results, top, and the negatives, flops, to establish which model represented the best innovation.
Observing these results, it was possible to identify the most innovative model, that is the one with the highest delta. The reference is that of the Lightning Ls-218 with a delta of 4.
In fact, to be able to design an innovative motorcycle it is necessary to overcome or equal this delta, through the improvement of 4 or 5 characteristics without worsening other values. Furthermore, taking as a reference the best results of each specification, it is possible to create a table that represents how to work to improve (Table 4).
Table 4.
Innovation list targets table.
In particular, it has been decided to favor a high step to favor stability at high speeds, a reduced width and height of the saddle to favor control, and a low center of gravity.
The weight, of course, must be the least possible to favor performance, handling and, above all, autonomy, while all the parameters relating to the performance of the bike must be as high as possible, to compete even with sports vehicles.
A great deal of autonomy is necessary to be able to overcome the competition of the petrol vehicles, in fact, to guarantee this it is also necessary that the capacity of the battery is as large as possible, to allow a longer duration.
However, one of the biggest drawbacks, for the affirmation of mobility through electric vehicles, is certainly related to the duration of the recharge times, so we will look for a value that is as low as possible.
Finally, it is advisable to present yourself as a cost leader with respect to competitors, in order to guarantee a higher customer base from the moment the product enters the market.
Considering all this, through the analyze phase, we will choose the most correct parameters to be improved, remembering that the delta-objective to be reached must be greater than 4.
4. Analyze
Once the define, measure, benchmarking, and top-flop analysis phases are completed, the process defined by the QFD can be concluded, with the analyze phase, creating the “WHAT/HOW relationship matrix”.
4.1. WHAT/HOW Relationship Matrix
Through this table the “thing”, or the needs of the product according to the customer’s point of view, are compared with the “how”, that is the technical requirements necessary for the realization of the product, the same employed in the top-flop analysis.
For this stage the parameters used are those that have emerged, most significantly from the previous tables, which are indicated by cells colored in yellow.
Also, in this case numerical evaluations are used on the type of relationship: Nothing (empty box, equivalent to 0), weak (1), medium (3), strong (9). Finally, the sums are executed for rows and columns for these numbers.
From the reading of this “WHAT/HOW matrix” (Table 5), it is therefore possible to understand which are the most significant values, to be improved, for the innovative design of an electric motorcycle.
Table 5.
WHAT/HOW matrix.
In particular:
- -
- The sum of the line values indicates which requirement is most affected by the technical specifications.
- -
- The sum of the column values indicates the priority of the actions that must be implemented, to achieve the maximum effect on the row requirements.
On the basis of the values obtained, we note that the priority in the development of an innovative electric motorcycle is mainly linked to the specifications relating to: Vehicle weight and battery capacity, range of autonomy, sales price, and finally, to the installed power.
It means that if the designer wants to please, the customer should emphasize the above-mentioned characteristics (i.e., weight, battery capacity, autonomy, price and power) during the design process.
Before starting with the design phase, it is necessary to analyze how the most important technical specifications are influenced. In this way, it is possible to establish how to intervene on the single characteristic to determine the best innovative solution of the product.
4.1.1. Weight
The first characteristic analyzed, in order of importance, is the weight. The analysis of this specification focuses mainly on two aspects: The number of components used and the type of material used to make the parts.
Regarding the number of components used, it is obvious that a reduction of the parts can be a good solution, however, the functionality of the motorcycle must still be guaranteed and it is not always possible to remove components without penalizing other aspects. Furthermore, there are parts that have a very high impact compared to the rest of the parts, such as the battery and the electric motor, even if their effect cannot be reduced, except with further technological advances.
On the other hand, if we consider components such as, for example, the rims, the forks, the frame or the tail, it is possible to intervene on the weight by choosing the type of material used.
In general, the choice of a material for a given component depends on various factors: The price, the mechanical characteristics, the specific weight, the aesthetic aspect, the workability, and the disposal possibilities.
If, however, we want to restrict the analysis only with respect to weight, the mechanical characteristics and specific weight are the determining values. In particular, we introduce the specific stiffness, or specific modulus, or the ratio between the elastic modulus and the density of the material. The higher this value is, the greater the weight reduction for structural rigidity.
If you want to choose which material to use to make a motorcycle frame, the main choices are analyzed in the table below.
The values shown are those relating to the most relevant mechanical characteristics (Table 6).
Table 6.
Mechanical characteristics table.
Steel is one of the most economical and common materials used. It is available in numerous shapes and sizes and is often used in the form of hollow, welded section tubes to create a trellis frame.
Titanium is very similar to steel, however, it has a very high cost and its application is limited to a few special components, in particular, it is used to create special screws on racing bikes.
Aluminum makes it possible to create structures that are more rigid and lighter than steel, due to its higher specific modulus, although it is slightly more expensive and requires much more complex welding methods. Furthermore, this material is particularly suitable for extrusion and casting processes, making it a valid solution for perimeter or monocoque frames.
Magnesium, on the other hand, despite having the same specific resistance as aluminum, has a low resistance to oxidation, if specific surface treatments are not carried out, and its properties easily degrade with high temperature values.
Carbon fiber reinforced polymers are extremely light and resistant materials, characterized by particularly high specific stiffness values. However, the application on motorcycle frames still needs further development, while there are already several examples of swingarms for racing bikes.
4.1.2. Battery
The other specification, of equal importance with the weight, is determined by the size of the battery. The choice for this specification is identified by how much energy can be stored per kilogram, which implies that attention is placed on the intrinsic limit of how light a battery can be.
This limit is characterized by two main aspects: The weight of the material used and how much energy is transmitted for each electron exchanged. Therefore, the optimal solution is that of a light material, which generates as much energy as possible.
At the moment, the standard for a light, rechargeable, and safe battery, available on the market, is to use lithium ions (li-ion batteries). To generate electricity, a transfer between atoms that tend to give up their electrons is necessary, such as alkaline metals, placed to the left of the periodic table, and atoms that tend to receive them, like non-metals. In fact, lithium, one of the lightest materials on the periodic table, is used as a material for the batteries of electric vehicles [4].
Specifically, on the one hand there is lithium and graphite (LiC6), with the possibility of different options for the other, usually using lithium oxide and cobalt (LiCoO2). Lithium atoms are what dissolve or deposit in order to transfer electrons, hence the name “lithium ions”. The other materials that do not actively participate during the transfer, despite having an important role from the chemical point of view, significantly increase the mass for each electron transferred.
The complete chemical reaction is:
Considering the year 1990, the amount of energy stored per kilogram was about half of its current value, so it is legitimate to ask how much this type of batteries can become read.
Analyzing these theoretical calculations, with a certain degree of approximation, it appears that the minimum possible weight of lithium ion batteries is about half their current value.
However, considering other materials that transfer more energy per electron for a given weight, there are theoretically better alternatives using lighter elements from the periodic table.
The Li-S battery, lithium sulfur, has a quantity of energy per electron similar to that of Li-ion batteries, but lithium and sulfur together are lighter than lithium, cobalt, oxygen, and carbon, equivalent to about 30%.
Approaching the theoretical limit of batteries based on chemical reaction, there is the Li-O2, or Li-air, lithium-air battery, which is equivalent to ≈25% of a Li-S, but still remains a technology still very advanced and technical difficulties are discouraging, bearing in mind that the two materials are in different physical states.
Finally, the limit is given by Li-F batteries, lithium-fluorine, but combining these two elements together is almost impossible. However, theoretically its weight would be only 90% of a lithium-air battery.
So, at best, the limit would be about 6% of current lithium ion batteries, but even a Li-air represents a technology that is still too advanced.
Furthermore, to guarantee the correct working condition of the batteries, the introduction of a cooling circuit may be necessary. In fact, during operation heat is generated due to I2R losses while the current flows through the internal resistances of the battery, both during charging and discharging. This is known as the Joule effect.
In case of discharge, the total energy of the system is limited and the temperature increase is limited by the availability of energy. However, this can cause high localized temperature increases, even in low power batteries. Already with internal resistance in the order of 1 m Ohm heating can be significant.
For this reason, a cooling system is required to minimize hot spots and distribute temperatures, ensuring a longer battery life.
This can be achieved by inserting refrigeration pipes between the various battery cells, then the coolant is cooled through the passage for a radiator, positioned in the front of the vehicle (Figure 2).
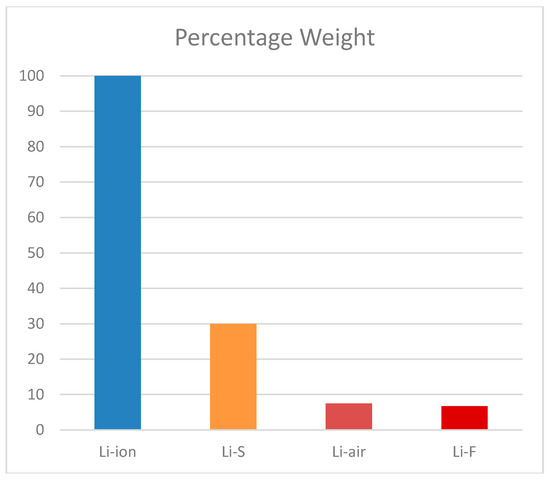
Figure 2.
Percentage representation of weights.
4.1.3. Autonomy
The analysis on autonomy is mainly focused on two aspects: The weight of the vehicle and the capacity of the battery, both have already been discussed previously.
In any case, it should be noted that as the capacity of the battery increases, the overall weight of the motorcycle increases, so it is not always said that as capacity increases there is a directly proportional increase in the range of autonomy.
4.1.4. Power
Therefore, the propulsion group is analyzed. Usually, to observe how power is articulated, three fundamental factors are examined, namely motor, power supply, and transmission. However, since it is an electric vehicle, the power supply is supplied by the battery pack, while the heat engine is replaced by an electric one.
In particular, there is no “standard” transmission, but a single-gear reduction is used instead. The reason for this choice is due to the fact that this is not necessary and also for simplicity.
Internal combustion engines are characterized by a limited useful torque curve, in a given range of engine revolutions, so it is necessary to change the transmission ratio, to allow the engine to operate efficiently. Instead, electric motors are capable of delivering high torque values, almost constantly up to the maximum engine revs.
Since useful values are obtained throughout the range of use there is no need for a transmission. And, furthermore, since the torque is available from 0 RPM, it is not even necessary to use a clutch.
If a multi-speed transmission is inserted, weight, complexity, friction, and inefficiency would be increased, compared to an otherwise simple system. In this way, the power produced and the overall efficiency would be reduced.
Considering the electric motor, the two main types present in electric vehicles are analyzed: Brushless DC motors, or alternatively, AC permanent magnet synchronous motors, and AC induction motors. The reason for this choice is due to their high range of use (the useful torque is available from zero speed up to over 10,000 RPM) and potentially, since they do not require additional components, they do not have parts subject to particular wear, allowing around millions of uses.
The brushless DC motors and the AC permanent magnet motors are grouped together because they have a virtually identical mechanical construction, however, they have slight differences in the waveform. They have a relatively high cost, as they use rare earths within their magnets, but they guarantee a small advantage in terms of efficiency and the size/weight ratio. This becomes all the more important the smaller the dimensions become, as in the case of an electric motorcycle, therefore, they are particularly suitable for almost all electric wheeled vehicles [4].
On the other hand, alternating current induction motors, resulting in less expensive, can fill the small size/weight disadvantage for large vehicles, such as buses or trucks.
However, an electronic device must be introduced to control the motor. By inserting an inverter or a buck converter, you can adjust the power that is generated, otherwise you would always have the condition of operation at maximum speed.
The battery pack produces the current directly, so a conversion is necessary before being transferred to an AC motor. For this purpose, an inverter is inserted, which converts direct current to alternating current. Moreover, this device allows to vary the amplitude and frequency parameters, controlling the power output from the motor. It can also be used to regenerate current during slow-downs or braking.
In the case of DC motors, a conversion is not necessary, however, a buck converter is still required. This device allows to lower the voltage, while increasing the current, and vice versa, from the input to the output. So, its use is essential to control the torque produced by the DC motor.
4.1.5. Price
Finally, the total price of the motorcycle is determined both by the quality and quantity of the components used, which affect variable costs, and by project and management costs, or fixed costs, compared to the number of volumes, all multiplied by a coefficient k (typically values less than 3 are not used).
In particular, under the heading of fixed costs all expenses related to the phases of research and development must be included, therefore costs of prototyping, analysis of the materials and work of the engineers, then the expenditure on production plants and the cost of services, electrical, logistics, and marketing.
5. Design
Once all the information on how to make an innovative electric motorcycle has been collected, you can move on to the design phase. For this purpose, we used Autodesk Inventor software, which allows the creation of 3D models for mechanical design.
In the initial phase, the main parts that make up an electric motorcycle are determined, by determining a bill of materials for macro families of components [7,8,9,10,11].
In particular, the design of the frame for an electric motorcycle is discussed in detail, while a specific study is not carried out for all the other main components.
Macro-bill of materials is depicted below (Table 7):
Table 7.
Mechanical.
5.1. Frame Design
The frame performs a fundamental function for making a motorcycle. Its role is to support the engine, the battery, and the pilot also ensures the position for the steering and rear suspension. It must be designed to be able to withstand even during critical conditions, which is verified through the Computer Aided Engineering (CAE), computer-aided engineering, in the validate/verify phase.
During the design it is necessary to consider also how it will be realized, therefore it is necessary to evaluate the materials used, their workability and according to which configurations it is possible to find the optimal solution. Since an analysis on the materials used has already been carried out in the previous chapter, we will consider the various types of frames that can be made [5,6,7,8].
5.1.1. A Cradle
The cradle frame was, historically, one of the first frames for motorcycles. It was developed so that it could contain the motor and the other components in a sort of cradle, supported by a single plug in the upper part. The cradle can be single or double (Figure 3 and Figure 4), depending on the size of the housing or the design requirements.
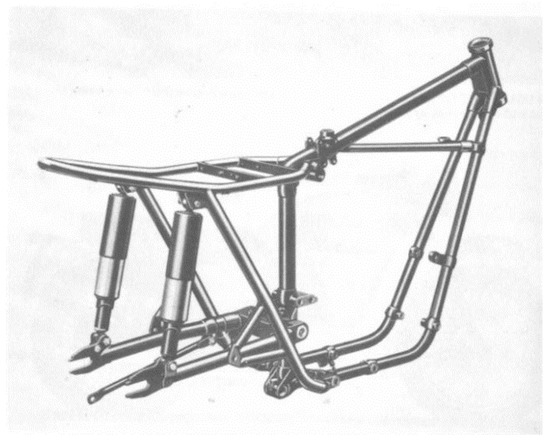
Figure 3.
Single cradle frame.
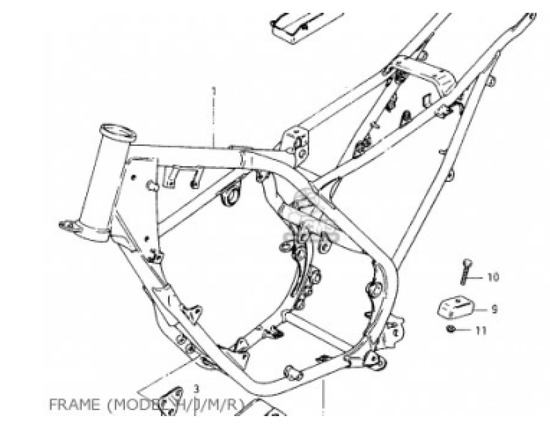
Figure 4.
Double cradle frame.
5.1.2. Perimeter
It consists of two beams that extend around the engine to join the steering tube and swingarm. It is developed so as to do this in the shortest possible distance, so as to obtain greater rigidity.
Usually the beams are formed from pressed metal, usually steel or aluminum. Furthermore, it is the same concept used for lattice frames (Figure 5 and Figure 6).

Figure 5.
Perimeter frame.
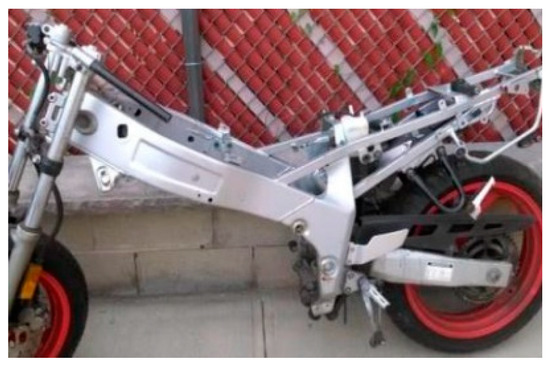
Figure 6.
Perimeter frame assembled.
5.1.3. Monoblock
It is a particular type of frame, mainly used in the automotive world. A monocoque is a structure that bears the loads through its profile, including both compression and traction forces. It is mainly used for racing vehicles as it guarantees low weight and high stiffness. At present, the main material used is aluminum, as it is particularly suitable for extrusions and castings.
Compared to cars, the development of carbon fiber monocoque is still in the experimental phase, while the application on other elements, such as the rear swingarm, is already possible (Figure 7 and Figure 8).

Figure 7.
Monoblock frame.

Figure 8.
Monoblock frame assembled.
5.1.4. Trellis
A trellis frame connects the steering tube directly to the swingarm as directly as possible, as in the case of a perimeter frame. In this case, however, metal tubes are used arranged to form a triangle. Taking advantage of the principles of reticular structures, a trellis frame is typically constituted by a circular or oval section of tubular metal segments which are welded or brazed together. A good trellis structure should provide a lightweight, durable frame that simplifies the positioning of the engine, and other components, and leaves good access for maintenance. Furthermore, it does not require a complicated process to make it as for perimeter frames (Figure 9 and Figure 10).

Figure 9.
Trellis frame.

Figure 10.
Trellis frame assembled.
Considering the various options available and the previous analyses of the most important technical specifications, it was decided to create an aluminum trellis frame.
In this way, it is possible to create (in Figure 11 and Figure 12 the Computer Aided Design (CAD) model) a structure that is light, but at the same time resistant, emphasized by the use of a material such as aluminum, so that the frame can be innovative through a weight analysis. Moreover, even from an economic point of view, the cost of raw materials is limited and a simple process was used. The frame made is as follows:
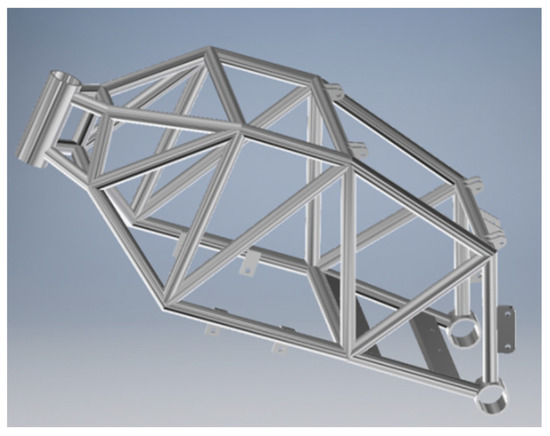
Figure 11.
Trellis frame Computer Aided Design (CAD) model.
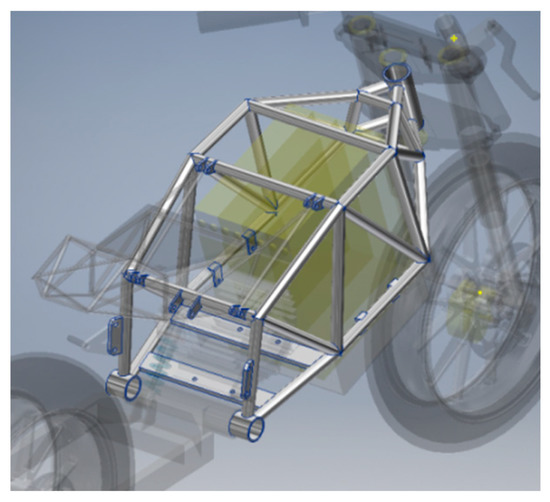
Figure 12.
Trellis frame CAD model assembled.
In particular, it can be seen how the space for the insertion of an electric motor and a large battery pack has been considered.
Furthermore, a series of supports were inserted, which was then welded to the truss tubes, to support the saddle, the tail, the rear suspension attachment, and the batteries. Finally, plates were added to connect the platforms and support the electric motor.
5.1.5. Design of the Electric Motorcycle
Once the frame was completed, the 3D model of the motorcycle was completed: The remaining components were drawn, present in the bill of materials, and assembled according to the correct couplings (Figure 13).
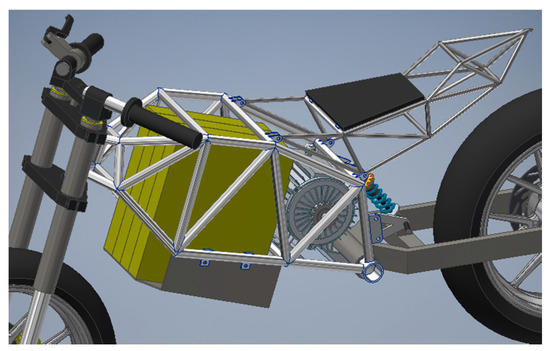
Figure 13.
Designed motorcycle CAD model without fairing.
In particular, the engine and battery pack were placed in a central position and at the lowest possible distance from the ground, in order to lower the center of gravity and make the bike more stable.
Finally, a fairing was added to cover the vehicle: It can be seen in an isometric back view (Figure 14a) and isometric front view (Figure 14b).
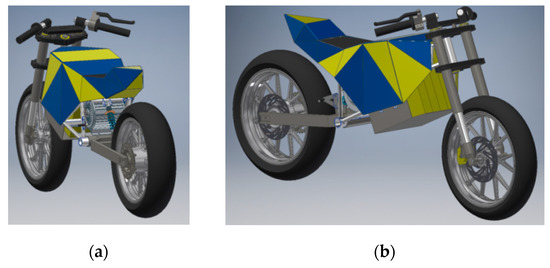
Figure 14.
Designed motorcycle CAD model with fairing. (a) isometric back view; (b) isometric front view).
As already analyzed previously, in electric vehicles the presence of the clutch is not necessary, therefore on the handlebar of the motorcycle there is only the lever responsible for the front brake.
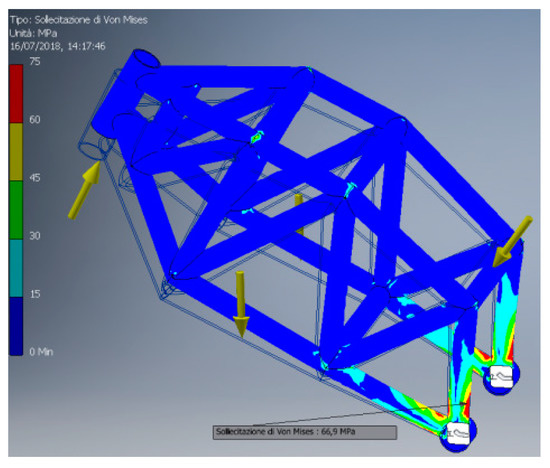
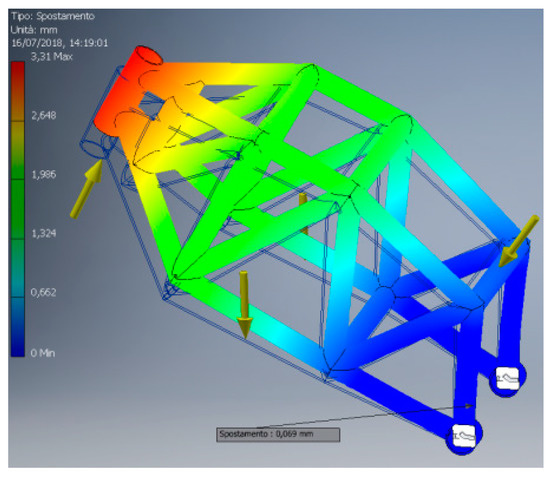
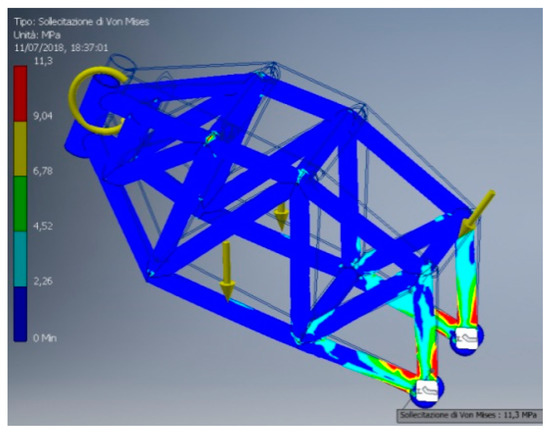
6. Validate/Verify
The last phase of the DFFS includes the verification of the product produced. For this paper it was decided to use a computer-aided engineering verification with a CAE system.
To test the correct dimensioning of the lattice frame, static resistance tests were performed. The loads to which it is subjected in the condition of maximum stress were evaluated, that is, while one is performing an abrupt braking or encountering an irregularity in the asphalt.
6.1. Irregularity in Asphalt
Consider, therefore, the case in which the motorcycle encounters a hole or an obstacle during its run.
If the collision with a step is analyzed, at the moment of impact there will be a contrary reaction to the motion of the advance of the motorcycle on the front, which will cause a deceleration of the vehicle. The reaction force will pass first through the front wheel, then from the fork and finally it will reach the steering tube [9]. Using the impulse theorem it is possible to determine the force generated by the collision with the step through the formula:
where m represents the total mass of motion and pilot, ∆v the speed change following the impact, F is the force to be determined to perform the dimensional analysis, while ∆t represents the duration time of the impact (Figure 15).

Figure 15.
Impact force representation with a step.
Considering a case of violent impact, a deceleration of about 10 km/h is assumed, equivalent to about 3 m/s, while the same mass assumed for abrupt braking is considered. While, for the temporal variation, it has been ascertained that the time of duration of the impact, defined as impulse of the collision, can vary in an arc between 0.09 and 0.15 s.
Replacing the data you get:
Taking into account the suspensions present in the front fork, if a collision absorption is assumed for a duration of 0.5 s, obtainable from CTP tables, the actual value of the force acting on the sleeve is equal to:
By replacing the data, the following results were obtained:
6.2. Braking Phase
The stresses arise from a load transfer from the rear to the front with a consequent increase in load on the front axle (Figure 18).
where mg indicates the total load acting on the center of gravity, F the total braking force, A the longitudinal distance between the front wheel pin and the center of gravity, B the longitudinal distance between center of gravity and rear wheel pivot, finally, L is the wheelbase of the motorcycle.

Figure 18.
Representation of forces acting during braking.
It can be assumed, as a first approximation, that all the braking power is concentrated on the front, the limit condition occurs when the rear wheel is raised (Npt = 0), so a maximum deceleration is obtained equal to:
The maximum horizontal force, on the ground, is recorded immediately before the front wheel is locked (once this threshold is exceeded, the tire is completely slipped), or before the rear wheel is raised, if the characteristics of the tire and the geometry of the motorcycle allow it.
The maximum horizontal braking force on the front wheel is given by the product of the adhesion coefficient μ for the load on the wheel:
To perform the calculation typical values are used, obtained from the study in the benchmarking phase.
Consider, therefore, L = 1450 mm, A = 700 mm, B = 750 mm, Hg = 425 mm, μ = 1.3, Mbike = 225 kg, Mrider = 80 kg. With these values the following results are obtained:
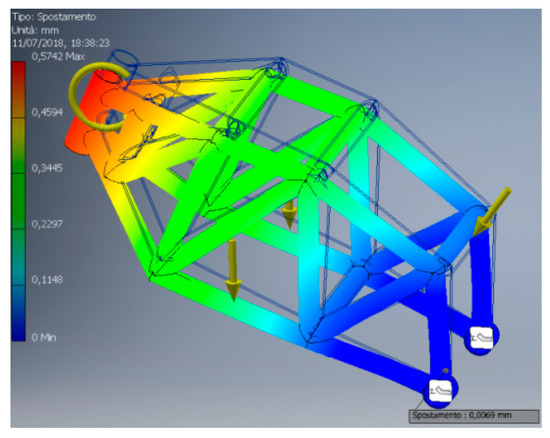
For the analysis of the frame, the interlocking constraint on the holes of the swingarm pivot was considered fixed and a moment perpendicular to the steering axis and belonging to the middle plane of the frame, applied at the center of the steering tube.
To determine the moment on the dinghy a rake angle of 20° was assumed, typical for sports motorcycles, and a fork length of 500 mm (Figure 19) [12].
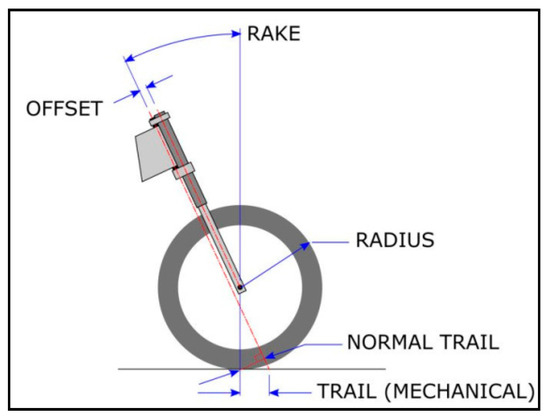
Figure 19.
Representation of rake angle.
The time used was calculated as follows:
In addition, 1200 N was determined for the weight of a 15 kWh battery and a permanent magnet motor, considering an energy density of about 250 Wh/kg and a mass motor of 60 kg, and 800 N for the rider’s weight, about 80 kg.
The following results were obtained for the truss of 33.7 mm diameter and 3 mm thick aluminum tubes:
6.3. Design Validation
Considering that the targets defined during the third DFSS Step, i.e., analyze phase, were:
- -
- Weight
- -
- Battery
- -
- Autonomy
- -
- Price
- -
- Power
We can affirm that they were reached applying DFSS complete methodology, because it helped the designer not to forget any aspect useful to satisfy them.
In particular, low weight could be implemented using a very light and resistant trellis frame, as above illustrated; then, at the moment good performance batteries, already present on the market, in order to satisfy the best standards, linked to lightness, recharge ability and safeness, are lithium ions ones (li-ion batteries).
About autonomy, it depends mostly on weight and batteries; so, satisfying these requirements, also autonomy is achieved.
Speaking about price, it depends on the selling volumes of this new motorbike. So, if the technical parameters will satisfy the customer, the price will decrease.
Finally, power: A single-gear reduction is used instead. The reason for this choice is due to the fact that this is not necessary and also for simplicity, as widely illustrated above. About the electric engines, the two main types present in electric vehicles were analyzed: Brushless DC motors or, alternatively, AC permanent magnet synchronous motors, and AC induction motors.
7. Conclusions
With this work we intended to organize the design using the design for six sigma method.
It can be considered both a composed and composite method. Composed, because consisting of define, measure, analyze, design and validate/verify phases. Composite, because it uses other methods suitable for systematic design, such as the quality function deployment (QFD), the bench marking [10], the top-flop analysis. The validity of the proposed methodology was verified through the application of a design case study of a low environmental impact motorcycle, that is an innovative electric propulsion vehicle.
Future developments can follow many different paths: For example, the authors have studied the possibility of integrating another scientific method inside Design for Six Sigma (DFSS), i.e., TRIZ (in Russian, Teorija Rešenija Izobretatel’skich Zadač), which is a specific approach oriented to carry out innovative characteristics during the set up design phase. TRIZ could be implemented, for example, in the DFSS third step, i.e., “analyze phase”. Moreover, another method, poka-yoke, oriented to optimize technical design could be integrated in the DFSS fourth step, i.e., “design phase”. There are many opportunities to reach a great well organized method under the scheme offered by DFSS. There are many possibilities to enrich the master method (i.e., DFSS) with a specific innovative approach already existing in literature, but normally used separately [12].
Author Contributions
Conceptualization, L.F.; Software, A.L.; Writing—original draft, L.N.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liverani, A.; Caligiana, G.; Frizziero, L.; Francia, D.; Donnici, G.; Dhaimini, K. Design for Six Sigma (DFSS) for additive manufacturing applied to an innovative multifunctional fan. Int. J. Interact. Des. Manuf. 2019, 13, 309–330. [Google Scholar] [CrossRef]
- Akao, Y. QFD, Quality Function Deployment, Landsberg; Verlag moderne Industrie: Landsberg am Lech, Germany, 1992. [Google Scholar]
- Hassan, M.F.; Jusoh, S.; Yunos, M.Z.; Arifin, A.M.T.; Ismail, A.E.; Ibrahim, M.R.; Rahim, M.Z. Application of design for six sigma methodology on portable water filter that uses membrane filtration system: A preliminary study. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Beijing, China, 24–27 October 2017; Volume 243, p. 012048. [Google Scholar]
- Jiang, J.-C.; Hsu, C.-H.; Nguyen, T.-A.-T.; Dang, H.-S. Investigating the designed parameters of dual-layer micro-channel heat sink by design for six sigma (DFSS). In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017; p. 1351. [Google Scholar]
- Nicolaescu, S.S.; Kifor, C.V. Teaching methodology for design for six sigma and quality techniques an approach that combines theory and practice. In Proceedings of the Balkan Region Conference on Engineering and Business Education, Sibiu, Romania, 19–22 October 2017; Volume 3, p. 328. [Google Scholar]
- Freddi, A. Imparare a Progettare (Learning to Design, in Italian); Pitagora: Bologna, Italy, 2002. [Google Scholar]
- Schmitt, F. Which Is the Best motor For Electric Vehicles (EVs) and Why? Available online: https://www.quora.com/Which-is-the-best-motor-for-electric-vehicles-EVs-and-why (accessed on 15 March 2019).
- Warner, J. The Handbook of Lithium-Ion Battery Pack Design: Chemistry, Components, Types and Terminology; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Cocco, G. Motorcycle Design and Technology. How and Why; Giorgio Nada Editore: Vimodrone, Italy, 2004. [Google Scholar]
- Nicolò, F. Progettazione, Realizzazione e Verifica del Telaio del Progetto Motostudent; Università degli Studi di Padova: Padova, Italy, 2016. [Google Scholar]
- Analisi del Moto pre e Post urto del Veicolo. Available online: http://www.fupress.com/archivio/pdf/2787.pdf (accessed on 15 March 2019).
- Frizziero, L.; Donnici, G.; Francia, D.; Caligiana, G.; Gaddoni, A. Stylistic design engineering (SDE) for an innovative green vehicle following QFD and TRIZ applications. Int. J. Mech. Prod. Eng. Res. Dev. 2019, 9, 805–827. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).