Abstract
The purpose of this research was to determine the optimal geometry of a variable pitch conical helicoid to be used in a pressing machine for grape pomace, also known as grape marc. This study attempted to understand if the optimized geometry of the considered helicoid after every pitch resulted in volume decrease DVc, equal to that obtained during the pressing phase of grape pomace DVp, using an optimized membrane press. The conical helicoid with variable pitch was replaced in a machine that offered continuous pressing of grape pomace using a cylindrical helicoid with constant pitch (constant pressure distribution, not optimized, along the cochlea axis). As this was a machine already available in the market, the overall dimensions were already established—5.95 m in length and 1.5 m in width. The pressure distribution p1 and volume change DVp, obtained during the grape pomace pressing phase in the optimized membrane press (producing high-quality wine) was taken into consideration in this research. Furthermore, the optimized pressure distribution p1 was applied in seven phases during the pressing process, and a consequent volume change value DVp was obtained for each phase. Therefore, this study determined the geometry of the variable pitch conical helicoid, which, after every pitch, resulted in volume changing DVc that was similar to the volume changing DVp obtained by the optimized membrane press. For this scope, calculations were realized using the Mathematica 10 program code, which, on being assigned the overall dimensions, slope angle of the helicoid, and volume for the first pitch value, determined the radius and pitch values of the helicoid, total volume, and volume change DVc. It was also noted that by appropriately varying the geometric parameters (taper and pitch of the helicoid), different options of pressure distribution on grape pomace can be obtained, thus enabling improvement and optimization of product quality.
1. Introduction
In the wine production process, specialized machines are used to extract wine that is relatively virgin or fermented grape pomace [1,2,3]. The pressing operation is aimed at extracting, by mean pressure, the juice retained in grape pomace. Different devices called presses are used in the process; they function on a continuous or discontinuous mechanism. The pressing is performed by gradually increasing pressure, alternating with pauses such that the juice is extracted from the mass and skin until exhausted. To obtain a high-quality product, the solid part of the grapes has to maintain its integrity. There are various types of pressing machines widely used; they include the membrane press, which has produced good results. Although optimized pressing processes are in use, most of them employ a discontinuous process, which is not favored in the industrial ambit.
A continuous process is a method that is used to produce the greatest quantity in the shortest possible time. A continuous process is constant and uninterrupted, in contrast to the batch method, wherein a batch (determined quantity) is subjected to a process that needs completion before the subsequent one is initiated. A continuous process plant is designed such that there is uninterrupted flow of the product from one machine to another throughout the production process. Complex software and equipment programs monitor the process and regulate the flow. The production phases in continuous manufacturing follow one after the other, without interruptions, with shorter production times, without intermediate storage, lower production costs, and greater flexibility. This offers remarkable economic and technical benefits.
Presses that operate continuously are commercially available; however, they have not been optimized. They are able to obtain complete exhaustion of the skins, while respecting the peel and the stalk. A large loading hopper is constructed with perforated stainless steel sheets for separation of the must. This type of apparatus essentially consists of a perforated cylindrical compression chamber, fitted at one end with a feeding hopper and at the other with a hinged door, held in place with a counterweight. An Archimedes’ screw with a constant pitch ensures compression of the grape pomaces. Unfortunately, these types of presses are not optimized because they use cylindrical cochlea with constant pitch that allows only a constant pressure distribution during the pressing phase. Nevertheless, interest in this type of machine is still high because they are able to perform the pressing process in a truly continuous way, which is what the winemaking industry seeks. However, a disastrous flaw of these machines is that it does not allow the control and management of the pressure at which a given volume of pressed grape pomace is submitted, or pressure distribution along the cochlea axis.
Previous studies on different type of cochlea [4,5,6,7,8,9] and the effect of particle shapes [10,11,12,13] have been taken into consideration. These studies have investigated the effect on total mass flow rate, mass flow rate distribution from different regions of the hopper [4,14,15,16,17], draw down patterns and power consumption arising from a conical helicoidal screw with variable pitch [18,19,20,21]. The screws in these studies cover a wide range of commonly found designs, including variations in outer helicoid diameter, inner core taper and screw pitch spacing, [22,23,24,25,26], as reported in Table 1.

Table 1.
Solutions proposed to perform grape pomace pressing.
This research, therefore, seeks to optimize an existing continuous press by replacing the cylindrical helicoid (with a constant pitch) in the machine considered with a designed variable pitch conical helicoid that allows the researchers to obtain, after every pitch, the same volume changing DVP obtained for the optimized membrane presses—a variable pitch conical helicoid that obtains volume change DVc along the axis of the cochlea in an optimized membrane press, thus improving the quality of the product obtained. This research identified a variable pitch conical helicoid, which is able to perform the pressing process in a continuous and optimized way [8,27,28,29].
2. Materials and Methods
In this paper, a variable pitch conical screw that is able to carry out the extracting process of grape pomace liquid, similar to that of an optimized membrane press, is studied. The study seeks to realize, through the use of a variable pitch conical screw, volume change DVc after each pitch, equal to volume change DVp realized by optimized membrane presses, in the corresponding pressing phase. As a result, the variable pitch conical screw realizes the same liquid phase extraction process performed with an optimized membrane press. The membrane presses realize the extracting process in phases, with pressure increases for each phase not exceeding 0.20–0.30 bar, performing a drainage DVp of the liquid phase, following the scheme reported in Table 2.
Table 2.
Optimized pressure distribution p1 and consequent volume reduction DVp detected, % respect to the initial value V0, during pressing process performed with membrane press.
Therefore, a variable pitch conical screw was designed, which aimed to replace a constant pitch cylindrical screw in a continuous press machine. The objective of this step is reduction in volume DVc after each round of the screw (with variable pitch). Further, a hypothesis is made that this volume change that the mass of grape pomace undergoes is equal to the drained liquid phase; therefore DVp is the volume of liquid extracted.
The conical helicoid screw system with variable pitch induces a volume change, which depends on the geometry of the helicoidal surface considered [13,30,31,32]. Therefore, the study of helicoidal surfaces interacting with the grape pomace volume, as well as how they change along the axis of the machine, is important and necessary [14,33,34,35,36]. Further, we have hypothesized that the product DVp is constant for each cone volume considered, after each variable pitch value. Indeed, it is necessary to evaluate the characteristic geometric parameters of the variable pitch conical screw, such that the volume change DVc after each pitch value is equal to DVp detected for the optimized membrane press.
2.1. Experimental Tests
For the pressing process of grape pomace, optimized pressure distribution p1 and consequent volume changing DVp performed during the pressing process with membrane press is considered. They are generally used during pressing done with a pneumatic press, which has a seven-phase process. The optimized pressure distribution and consequent volume change DVp for each considered phase is reported in Table 2, and have been considered in determining the geometry of the conical helicoid with variable pitch. The geometrical shape of the conical helicoid that produced the volume change equal to DVp for the considered phases of 1, 2, 3, 4, 5, 6, 7 had to be determined. We assumed that each considered phase is representative of a cochlea portion after pitch value hi.
The bulk density of the considered grape pomace was around 500 kg m−3 and initial humidity was around 60%.
2.2. Helicoidal Screw Press Geometry
The proposed structure includes a central frame with suction and delivery connections obtained at the opposite ends, which enclose the helical screw. During the working process, the grape pomaces are moved to the opposite end along the external cavities between the screws and the frame. This helps avoid noise and pulsation. The main components are: the “rotor”, a metal conical helicoid screw that rotates inside the “stator”, a fixed part, creating a hermetic contact line between the two elements that allows the displacement of the grape pomace. As the elementary volume decreases, it is subjected to pressure that increases in proportion to the volume decrease.
The grape pomaces were contained in cylindrical volume with diameter of 1.50 m and height of 1 m; the initial volume V0 = 1.766 m3.
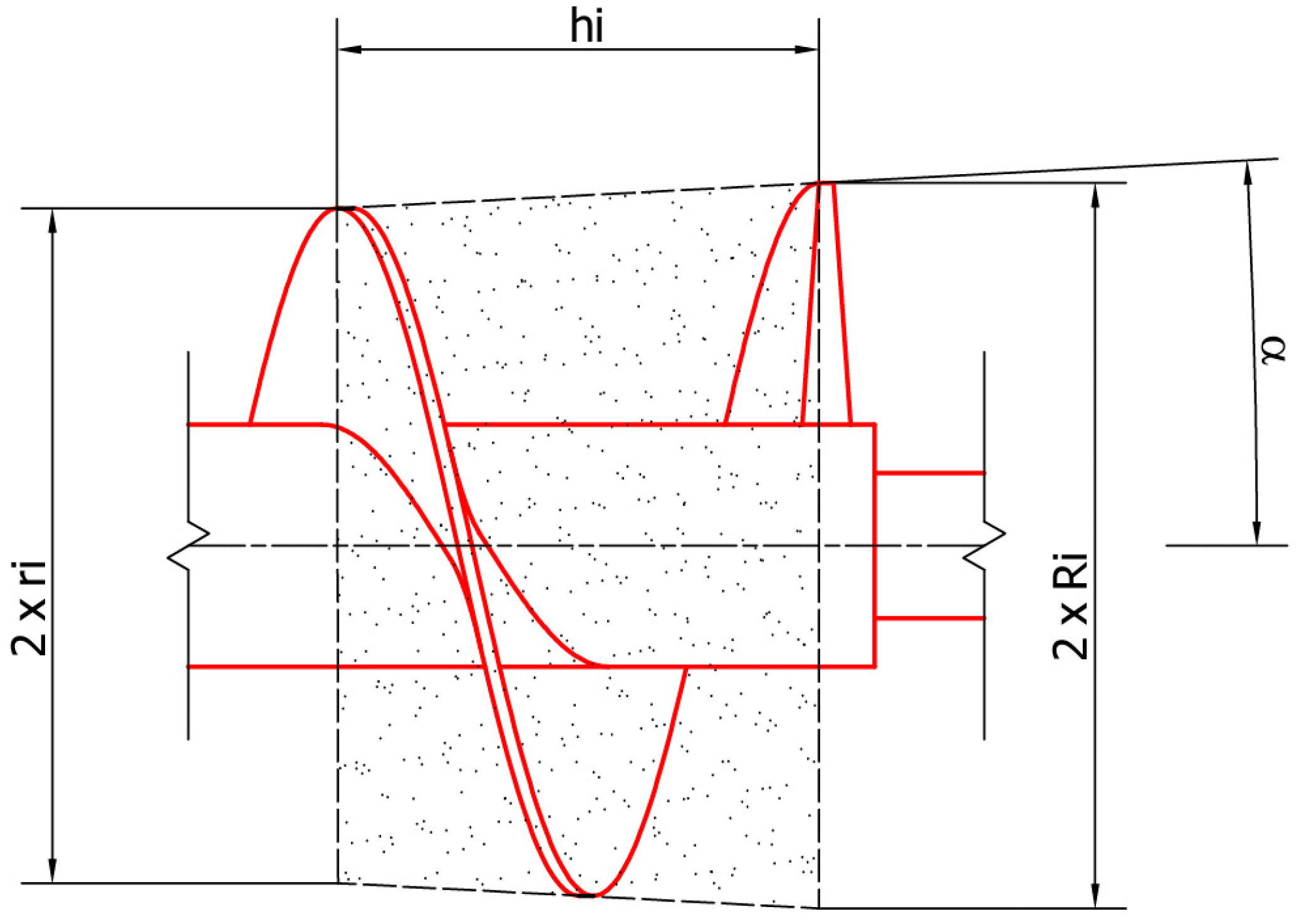
The volume enclosed by the conical cochlea with variable pitch, after the distance equal to pitch hi, is given by the initial value of the cochlea height (Ri) and the value of the cochlea height (ri) after pitch hi (Figure 1); whereby the volume enclosed by the cochlea tract considered after pitch h is the one enclosed in the truncated cone, if R = ri; r = ri
where V is the volume enclosed by the conical cochlea after pitch h. The volume of the cochlea central axle must be subtracted from it. Further, if we consider the cross-section of the cochlea, considering only the cochlea radius initial and final for every segment hi, we can note a succession of isosceles trapezius in which 2R is the major basis value, and 2r is the minor basis value. Further, the minor basis of a previous trapezius is the major basis of the following trapezius, for which we can write:
The initial volume V0 and liquid volume extract DV is known, because we suppose that the volume extract is equal to the volume reduction for each phase considered; for every phase i, volume Vi is:
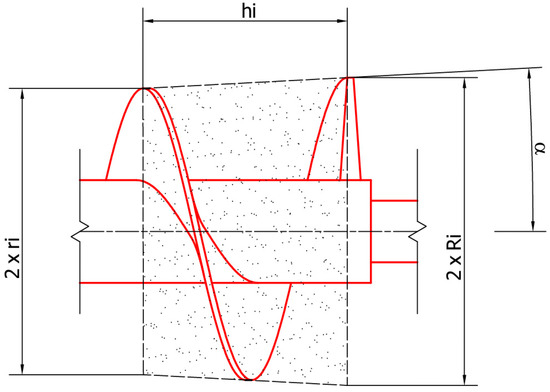
Figure 1.
Schematic representation of variable pitch conical screw of the considered continuous press that performed the pressing process, with the variable used in this paper.
The angle α formed by the cochlea axis and oblique side of the isosceles trapezius is given by:
For the following isosceles trapezius, after the first one, the unknown variables are ri and hi, which are determined by solving Formulae (3) and (4) and considering the other parameters examined. Taking into account the fact that we intend to replace the constant pitch cylindrical helicoid (not optimized) installed in the press machine with the optimized variable pitch conical helicoid screw, we are required to respect the overall dimensions. This resulted in a conical cochlea with variable pitch 5.95 m long and external maximum radius of 1.5 m.
The variable pitch conical helicoid allows submission of the grape pomace to variable pressures, so as to be able to realize the pressing process by applying an optimized pressure distribution. This kind of pressure distribution has been detected in membrane presses. Therefore, the overall dimensions of the machine to be optimized have been used. The following are known: the initial value of the input section and therefore the value of the major base R1 of the first isosceles trapezoid, the value of the height of the trapezoid, which is equal to step h1 = 1 m. Thus, we need to find out α ed r1. Once the initial volume V1, which is related to the capacity of the machine, is set based on Formula (3), we can calculate r1, since R1 and h1 are known, and α is obtained from Formula (4).
Subsequently we can proceed assuming α to be constant and then imposing the same volume decrease for the optimized process considered. The volume of the next cell is known, and therefore, it is possible to calculate the subsequent new hi and ri values, considering the same value of α. Keep in mind that the current Ri value is equal to the ri value of the previous trapezoid.
Therefore, the testing conditions are: V1 = 1.72 m3; h1 = 1 m; R1 = 0.75 m; α = 3°. It is also possible to assign different α values. As a result of the above analysis, a program code realized in Mathematica was set up to determine the characteristic geometric parameters of the optimized conical helicoid with variable pitch. As first pitch value, h1 = 1 m was considered. The program code was able to evaluate, for every assigned angle α and pitch value, the volume values Vi of each sector of the cochlea considered. Vi value is reduced with respect to the V0 value of quantity DVc (%), which is compared with the optimized volume changing DVp reported in Table 2. The evaluation was stopped when the differences were minimum, and the obtained values were angle α = 3° and pitch decrease of 5 cm along the cochlea axis. In Table 3, the determined pitches and radius values are reported. Table 4 reported the DVc volume decrease, after every pitch hi, evaluated with respect to initial volume V0. These DVc values obtained have been compared with the DVp values obtained with an optimized membrane press after every phase [37,38,39,40]. The maximum percentual difference was around 2%.
Table 3.
Pitches and radius helicoid values determined.
Table 4.
DVc and DVp volume changing evaluated, in % respect to the initial value V0, respectively, for the cochlea after every pitch and for the optimized membrane press after every phase.
It was, thus, possible to design an optimized cochlea and identify volume changing DVc after every pitch, similar to DVp realized by an optimized membrane press. The optimized cochlea is reported in Figure 2 and Figure 3 [41,42,43].
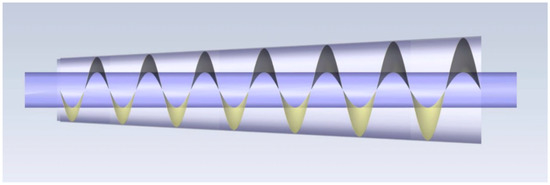
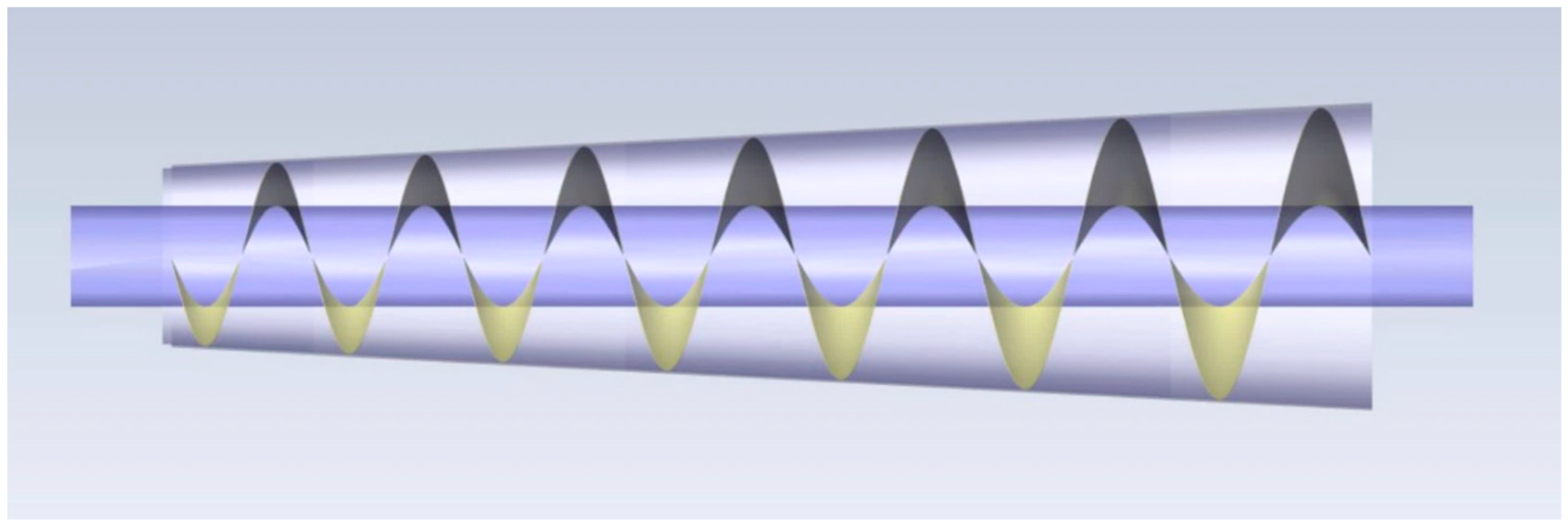
Figure 2.
Optimized variable pitch conical helicoid shape.
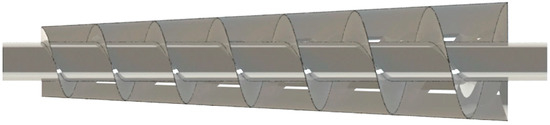
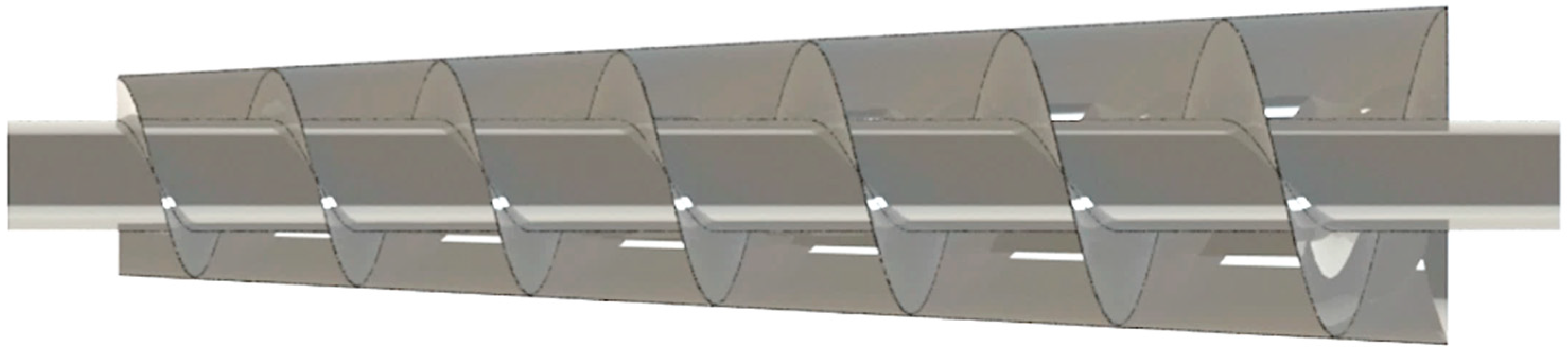
Figure 3.
Rendering of the optimized variable pitch conical helicoid.
3. Discussion
Table 4 notes that with the considered geometry for the variable pitch conical helicoid, the DVc volume change obtained is similar to the DVp volume change obtained with an optimized membrane press. In this case, we considered a constant α angle. However, it is possible to design another optimized variable pitch conical helicoid for the same optimized pressure distribution by using a variable α angle. In this case, we have chosen to keep angle α constant, because it is a simple solution.
3.1. Specific Energy Consumption
Specific energy consumption is the main technical and economic symbol of machinery equipment. It is the ratio of the driving power of the motor to the production capacity. The specific energy consumption of the screw press machine is:
where H is the specific energy consumption in kilowatt hours per ton, N is the driving power of the motor in kilowatts, and Q is the production capacity in tons per hour. At present, the screw press machine has no formula to calculate production capacity. Since the working principle of the screw press machine is similar to that of the screw conveyor, the formula of the production capacity of the screw conveyor is used to calculate the production capacity of the screw press machine, as given by:
where Ag is the section area of grape pomace in square meters, ν is the conveying velocity of grape pomace in meters per second, γ is the material accumulation density in tons per meter cubed. In the considered case, Q = 12 ton/h, resulting in Ag = 1.2 m2; ν = 0.05 m/s.
3.2. Quality of Wine
The final quality of the wine depends on many other factors and is still under study and experimental tests. However, the organoleptic characteristics of the musts obtained with a continuous press with a variable pitch conical screw, and an optimized membrane press were similar. However, the strategic and important fact remains that the variable pitch conical screw press performs a continuous process, while the optimized membrane press performs a non-continuous process, and this makes the comparison of consumption between the two types of machines viable in the second order, which was not carried out.
4. Conclusions
In this study, the geometry of a variable pitch conical helicoid screw to perform the optimized pressing process for grape pomaces was determined. It was found to be able to replace the constant pitch cylindrical helicoid screw installed in a press machine and perform a continuous pressing operation in oenological processes [44,45].
Therefore, the machine thus modified is able to carry out the process of grape pomace pressing in a continuous and optimized way; the optimized cochlea performs a volume changing DVc after every pitch, equal to the volume changing DVp realized by an optimized membrane press during the grape pomace pressing phase.
The designed machine is very efficient, from an operational point of view, with high work capacity compared to other optimized machines (operating with the discontinuous method) of equal power already available in the market. The examined geometry of the conical helicoid offers the same volume change as the optimized membrane press, following widely diffused enological regulations. The optimized geometry was determined by program code realized in Mathematica 10. The program continuously compared the calculated DVc values, for each pitch considered, with the assigned DVp, obtained by an optimized membrane press. When this difference was found to be less than 5%, the program provided the final results. By means of this program code, the radius and pitch for each phase was obtained. The variable pitch conical helicoid geometry acting on the grape pomace, generating the assigned volume variation DVp during the operative phase considered, was thus been determined. We considered a constant α angle; however, it is possible to design another optimized variable pitch conical helicoid for the same optimized pressure distribution by using a variable α angle. In this study, we choose to keep the angle α constant because it is a simple solution [46].
Further studies are needed to identify optimal pressure distributions for different grape pomace varieties.
Author Contributions
All the authors contributed equally to the research.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- De Vita, P. Corso di Meccanica Enologica, 1st ed.; Hoepli: Milano, Italy, 1997; pp. 100–125. [Google Scholar]
- Pappalardo, C.M.; Guida, D. Use of the adjoint method in the optimal control problem for the mechanical vibrations of nonlinear systems. Machines 2018, 6, 19. [Google Scholar] [CrossRef]
- De Simone, M.C.; Rivera, Z.B.; Guida, D. Obstacle avoidance system for unmanned ground vehicles by using ultrasonic sensors. Machines 2018, 6, 18. [Google Scholar] [CrossRef]
- Shimizu, Y.; Cundall, P.A. Three dimensional DEM simulation of bulk handling screw conveyors. J. Eng. Mech. 2001, 127, 864–872. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Dynamic analysis of planar rigid multibody systems modelled using natural absolute coordinates. Appl. Comput. Mech. 2018, 12, 73–110. [Google Scholar] [CrossRef]
- Belladonna, U. Elementi di Oleodinamica, 3rd ed.; Hoepli: Milano, Italy, 2001; pp. 90–120. [Google Scholar]
- Cammarata, A. A novel method to determine position and orientation errors in clearance-affected overconstrained mechanisms. Mech. Mach. Theory 2017, 118, 247–264. [Google Scholar] [CrossRef]
- Cleary, P.W. DEM modelling of particulate flow in a screw feeder. Prog. Comput. Fluid Dyn. 2007, 7, 128–138. [Google Scholar] [CrossRef]
- Iannone, V.; De Simone, M.C.; Guida, D. Modelling of a DC gear motor for feed-forward control law design for unmanned ground vehicles. Actuators 2019. (In Press)
- Cammarata, A.; Angeles, J.; Sinatra, R. Kinetostatic and inertial conditioning of the McGill Schönflies-motion generator. Adv. Mech. Eng. 2010, 2, 186203. [Google Scholar] [CrossRef]
- De Simone, M.C.; Russo, S.; Rivera, Z.B.; Guida, D. Multibody model of a UAV in presence of wind fields. In Proceedings of the 2017 International Conference on Control, Artificial Intelligence, Robotics and Optimization (ICCAIRO 2017), Prague, Czech Republic, 20–22 May 2018; pp. 83–88. [Google Scholar] [CrossRef]
- De Vita, P.; De Vita, G. Corso di Meccanica Enologica, 3rd ed.; Hoepli: Milano, Italy, 2004; pp. 70–90. [Google Scholar]
- Owen, P.J.; Cleary, P.W. Prediction of screw conveyor performance using the Discrete Element Method (DEM). Powder Technol. 2009, 193, 274–288. [Google Scholar] [CrossRef]
- Roberts, A.W. Design and performance criteria for screw conveyors in bulk solids operation. Bulk Sol. Hand 2002, 22, 436–444. [Google Scholar]
- Cammarata, A. Unified formulation for the stiffness analysis of spatial mechanisms. Mech. Mach. Theory 2016, 105, 272–284. [Google Scholar] [CrossRef]
- Firdaus, M.; Salleh, S. M.; Nawi, I.; Ngali, Z.; Siswanto, W.A.; Yusup, E.M. Preliminary Design on Screw Press Model of Palm Oil Extraction Machine. Colloquium of Advanced Mechanics (CAMS2016). IOP Conf. Ser. Mater. Sci. Eng. 2017, 165, 012029. [Google Scholar] [CrossRef]
- De Simone, M.C.; Guida, D. Dry friction influence on structure dynamics. In Proceedings of the 2015 5th Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Hersonissos, Greece, 25–27 May 2015; pp. 4483–4491. [Google Scholar]
- Pappalardo, C.M.; Guida, D. On the Lagrange multipliers of the intrinsic constraint equations of rigid multibody mechanical systems. Arch. Appl. Mech. 2018, 88, 419–451. [Google Scholar] [CrossRef]
- Fu, Y.F.; Gong, J.; Peng, Z.; Li, J.H.; Li, S.D.; Li, P.W.; Yang, Z.M. Optimization design for screw wash-sand machine based on fruit fly optimization algorithm. J. Appl. Sci. Eng. 2016, 19, 149–161. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. On the Computational Methods for the Dynamic Analysis of Rigid Multibody Mechanical Systems. Machines 2018, 6, 20. [Google Scholar] [CrossRef]
- De Simone, M.C.; Guida, D. Modal coupling in presence of dry friction. Machines 2018, 6, 8. [Google Scholar] [CrossRef]
- Milosavljevic, B.; Pesic, R.; Dasic, P. Binary Logistic Regression Modeling of Idle CO Emissions in order to Estimate Predictors Influences in Old Vehicle Park. Math. Prob. Eng. 2015, 2015, 463158. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Control of nonlinear vibrations using the adjoint method. Meccanica 2017, 52, 2503–2526. [Google Scholar] [CrossRef]
- Owen, P.J.; Cleary, P.W.; McBride, B. Simulated granular flow in screw feeders using 3D Discrete Element Method (DEM). CHEMECA 2003, 1, 10–15. [Google Scholar]
- Dasic, P.; Franek, F.; Assenova, E.; Radovanovicville, M. International standardization and organizations in the field of tribology. Ind. Lubr. Tribol. 2003, 55, 287–291. [Google Scholar] [CrossRef]
- Cleary, P.W. Large scale industrial DEM modelling. Eng. Comput. 2004, 21, 169–204. [Google Scholar] [CrossRef]
- Callegari, M.; Cammarata, A.; Gabrielli, A.; Sinatra, R. Kinematics and dynamics of a 3-CRU spherical parallel robot. In Proceedings of the ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers, Las Vegas, NV, USA, 4–7 September 2007; pp. 933–941. [Google Scholar]
- Naviglio, D.; Formato, A.; Scaglione, G.; Montesano, D.; Pellegrino, A.; Villecco, F.; Gallo, M. Study of the grape cryo-maceration process at different temperatures. Foods 2018, 7, 107. [Google Scholar] [CrossRef] [PubMed]
- Cammarata, A.; Lacagnina, M.; Sinatra, R. Dynamic simulations of an airplane-shaped underwater towed vehicle marine. In Proceedings of the Computational Methods in Marine Engineering V—5th International Conference on Computational Methods in Marine Engineering, Hamburg, Germany, 29–31 May 2013. [Google Scholar]
- Barbagallo, R.; Sequenzia, G.; Cammarata, A.; Oliveri, S.M. An integrated approach to design an innovative motorcycle rear suspension with eccentric mechanism. In Proceedings of the Advances on Mechanics Design Engineering and Manufacturing—Lecture Notes in Mechanical Engineering Catania, Catania, Italy, 14–16 September 2016; Springer: Cham, Swizerland, 2017; pp. 609–619. [Google Scholar]
- De Simone, M.C.; Guida, D. Control design for an under-actuated UAV model. FME Trans. 2018, 46, 443–452. [Google Scholar] [CrossRef]
- Villecco, F. On the Evaluation of Errors in the Virtual Design of Mechanical Systems. Machines 2018, 6, 36. [Google Scholar] [CrossRef]
- Barbagallo, R.; Sequenzia, G.; Cammarata, A.; Oliveri, S.M.; Fatuzzo, G. Redesign and multibody simulation of a motorcycle rear suspension with eccentric mechanism. Int. J. Interact. Des. Manuf. 2018, 12, 517–524. [Google Scholar] [CrossRef]
- De Simone, M.C.; Guida, D. Identification and control of a Unmanned Ground Vehicle by using Arduino. UPB Sci. Bull. Ser. D Mech. Eng. 2018, 80, 141–154. [Google Scholar]
- Quatrano, A.; De Simone, M.C.; Rivera, Z.B.; Guida, D. Development and implementation of a control system for a retrofitted CNC machine by using Arduino. FME Trans. 2017, 45, 565–571. [Google Scholar] [CrossRef]
- Dasic, P.; Dasic, J.; Crvenkovic, B. Applications of Access Control as a Service for Software Security. Int. J. Ind. Eng. Manag. 2016, 7, 111–116. [Google Scholar]
- Barbagallo, R.; Sequenzia, G.; Oliveri, S.M.; Cammarata, A. Dynamics of a high-performance motorcycle by an advanced multibody/control co-simulation. Proc. Inst. Mech. Eng. Part. K J. Multi-Body Dyn. 2016, 230, 207–221. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. System identification algorithm for computing the modal parameters of linear mechanical systems. Machines 2018, 6, 12. [Google Scholar] [CrossRef]
- Cammarata, A. Optimized design of a large-workspace 2-DOF parallel robot for solar tracking systems. Mech. Mach Theory 2015, 83, 175–186. [Google Scholar] [CrossRef]
- Villecco, F.; Pellegrino, A. Evaluation of uncertainties in the design process of complex mechanical systems. Entropy 2017, 19, 475. [Google Scholar] [CrossRef]
- Formato, A.; Guida, D.; Ianniello, D.; Villecco, F.; Lenza, T.L.; Pellegrino, A. Design of delivery valve for hydraulic pumps. Machines 2018, 6, 44. [Google Scholar] [CrossRef]
- Pappalardo, C.M. A Natural Absolute Coordinate Formulation for the Kinematic and Dynamic Analysis of Rigid Multibody Systems. Nonlinear Dyn. 2015, 81, 1841–1869. [Google Scholar] [CrossRef]
- Cammarata, A.; Lacagnina, M.; Sequenzia, G. Alternative elliptic integral solution to the beam deflection equations for the design of compliant mechanisms. Int. J. Interact. Des. Manuf. 2018, 1–7. [Google Scholar] [CrossRef]
- Sena, P.; Attianese, P.; Pappalardo, M.; Villecco, F. FIDELITY: Fuzzy Inferential Diagnostic Engine for on-LIne supporT to phYsicians. In 4th International Conference on Biomedical Engineering in Vietnam; Springer: Berlin/Heidelberg, Germany, 2013; pp. 396–400. [Google Scholar]
- Muscat, M.; Cammarata, A.; Maddio, P.D.; Sinatra, R. Design and development of a towfish to monitor marine pollution. Euro-Mediterr. J. Environ. Integr. 2018, 11. [Google Scholar] [CrossRef]
- Carillo, M.; Formato, A.; Fabiani, A.; Scaglione, G.; Pucillo, G.P. An inertizing and cooling process for grapes cryomaceration. Electron. J. Biotechnol. 2011. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).