

Fault-Tolerant Control of the Electro-Mechanical Compound Transmission System of Tracked Vehicles Based on the Anti-Windup PID Algorithm

Abstract
1. Introduction
2. System Modeling
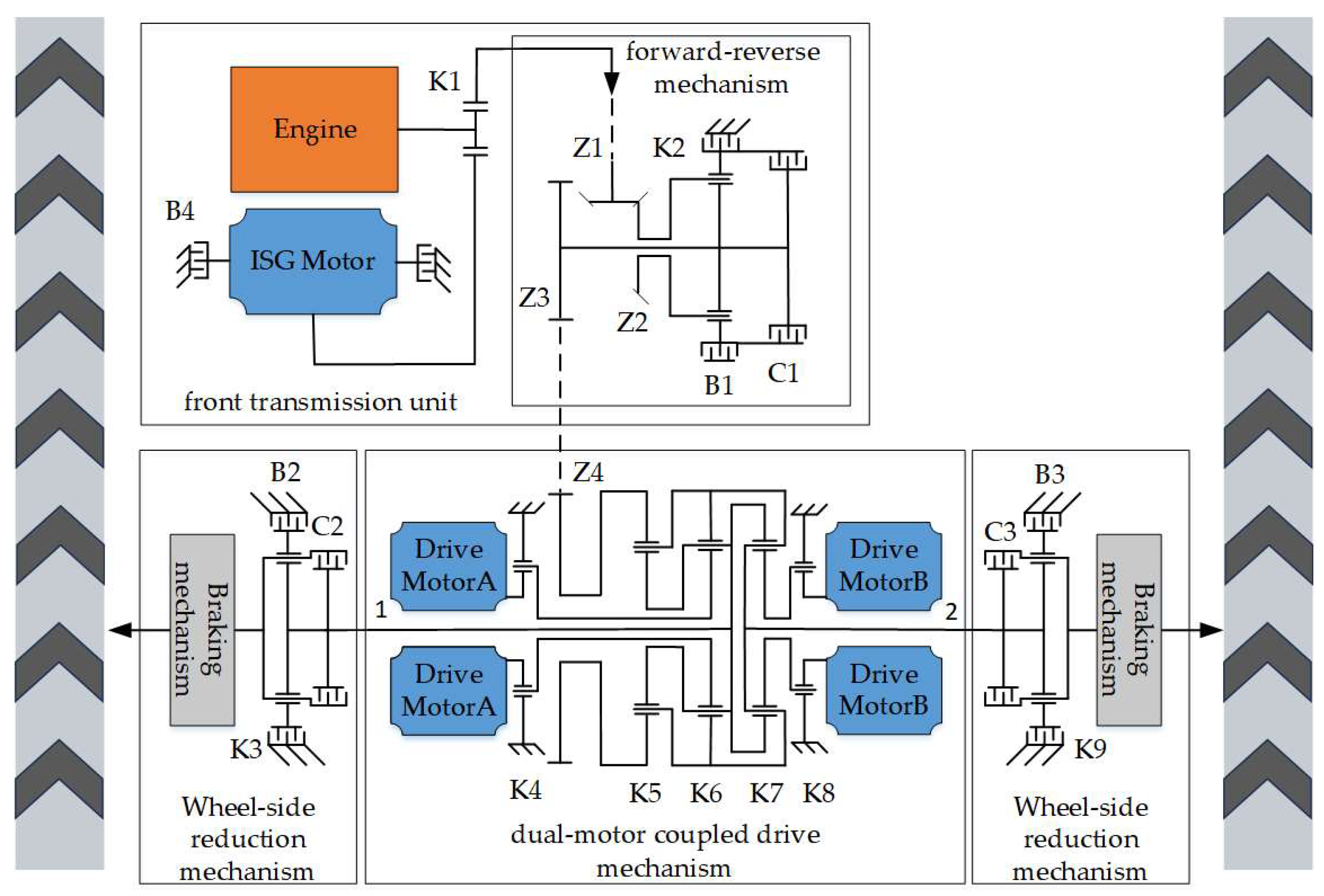
2.1. Introduction to System Scheme and Parameters
2.2. ECTS Dynamic Model
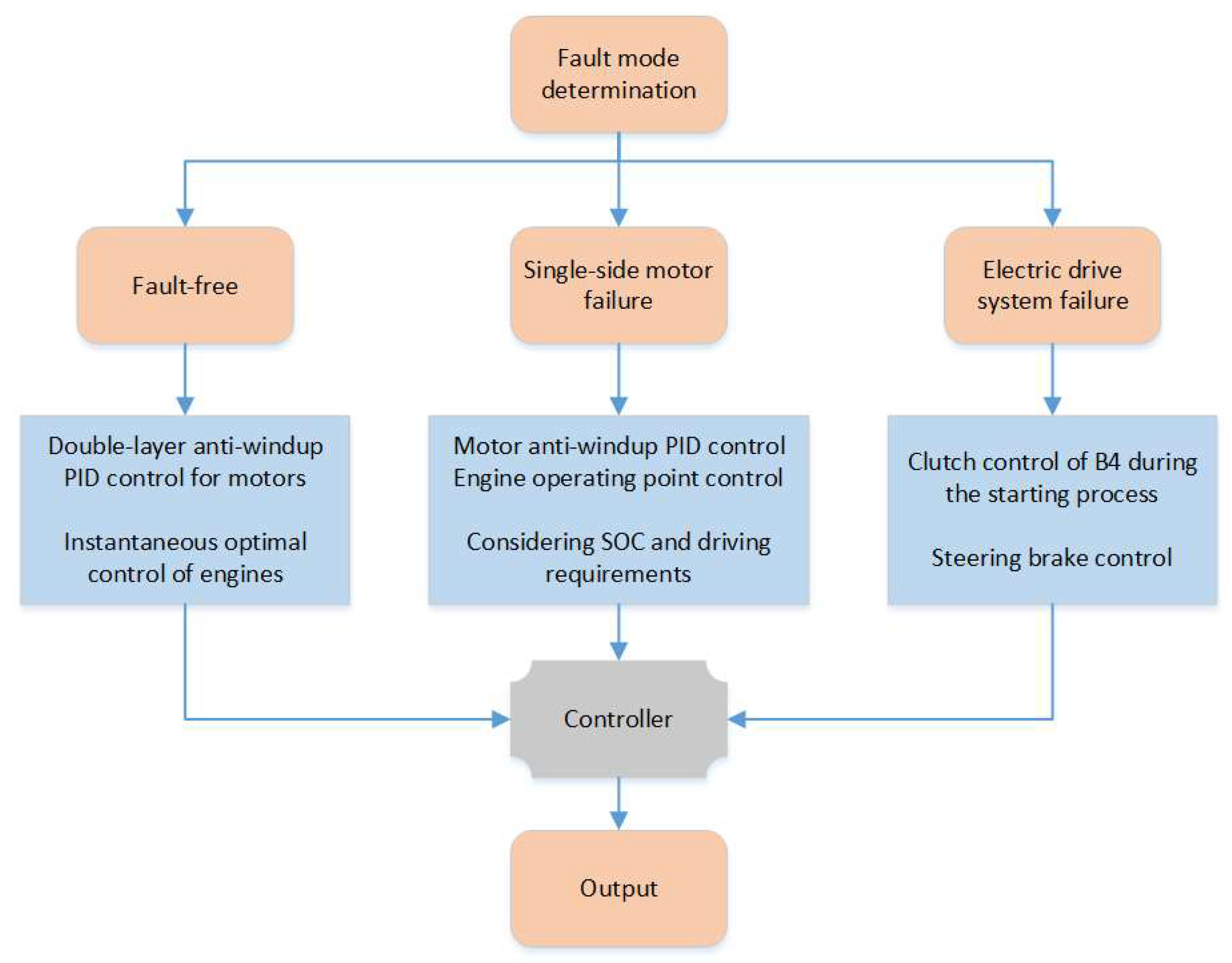
3. Fault-Tolerant Control
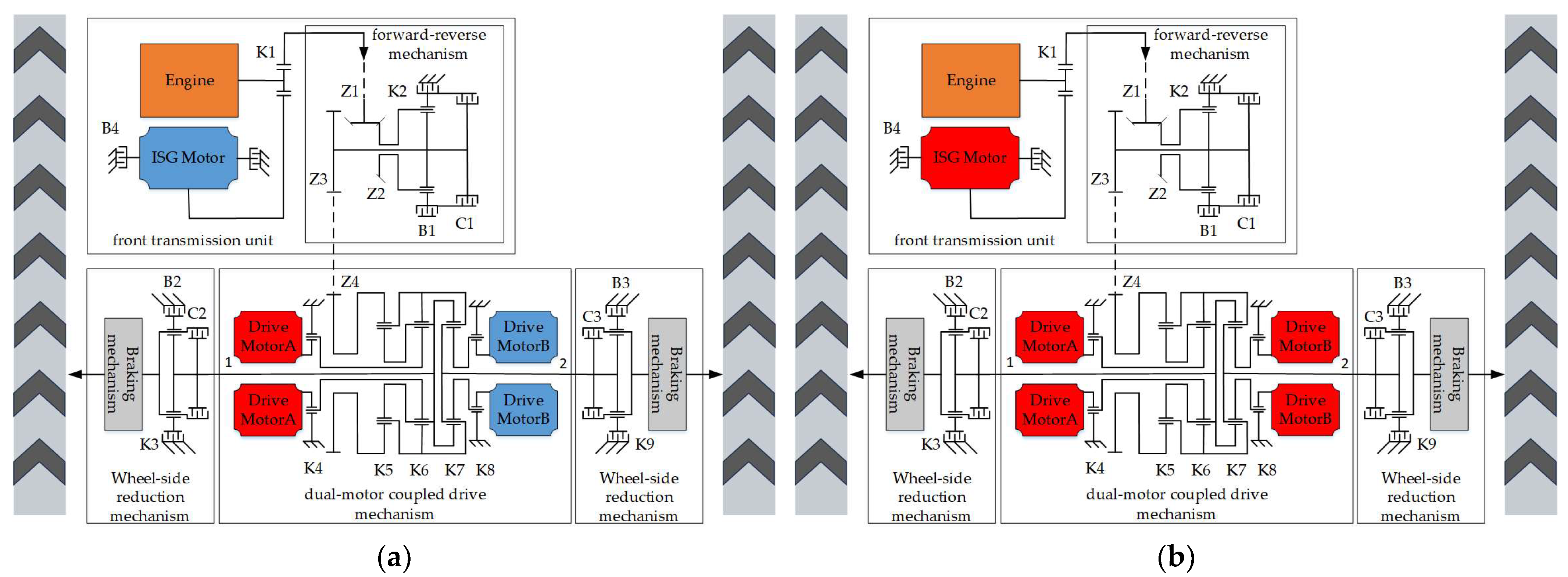
- When a single-side drive motor fault occurs, only the non-faulty side participates in steering drive. Engine power is dynamically adjusted based on the SOC to balance battery charging/discharging and driving demands.
- When an electric drive system fault occurs, the engine drives the tracked vehicle independently. The load is controlled via the B4 clutch and mechanical steering can be achieved by leveraging the brake pressure difference.
3.1. Control Strategy in Fault-Free Case
3.2. Control Strategy in the Case of Single-Side Drive Motor Fault
3.3. Control Strategy in the Case of Electric Drive System Fault
4. Simulation Verification
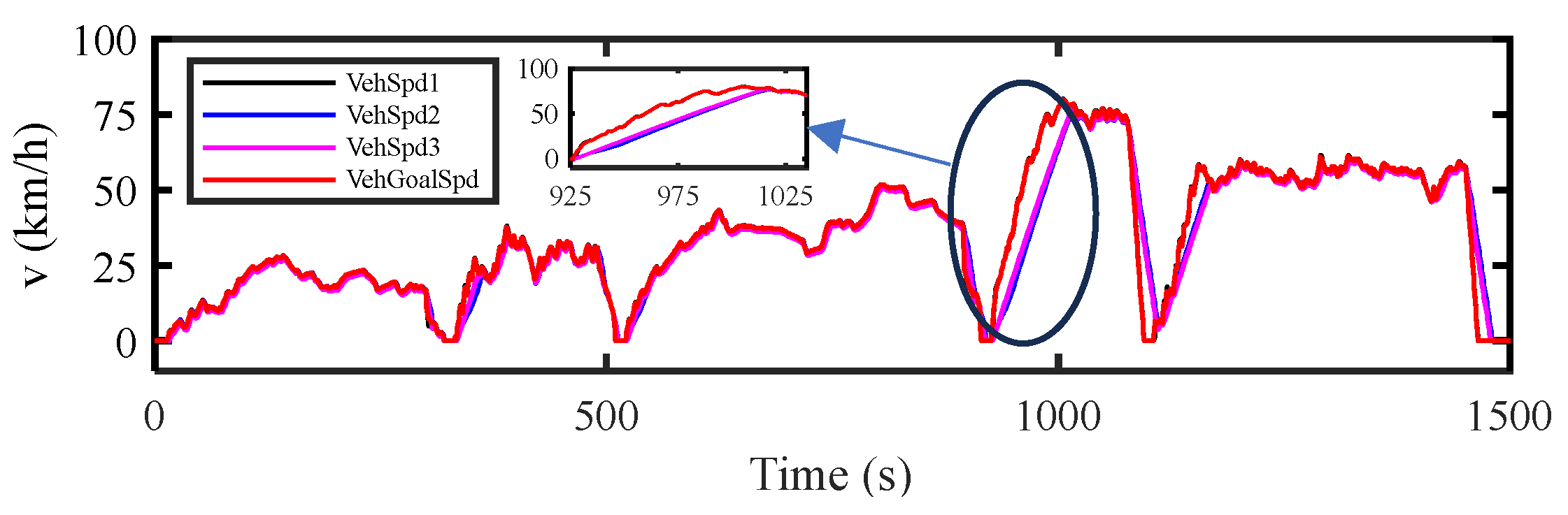
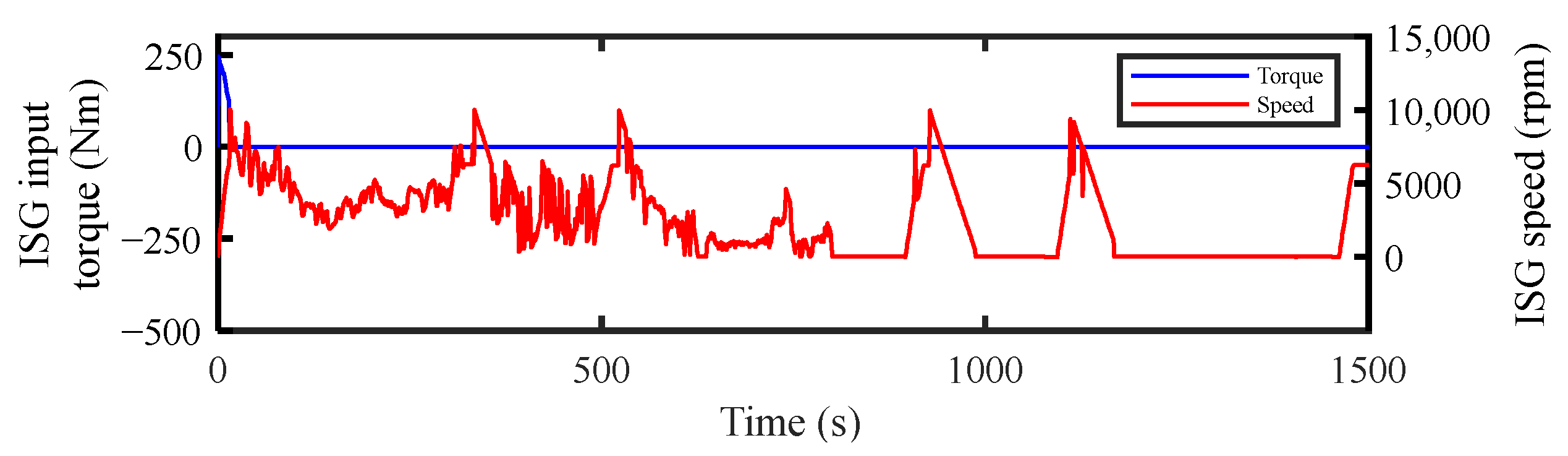
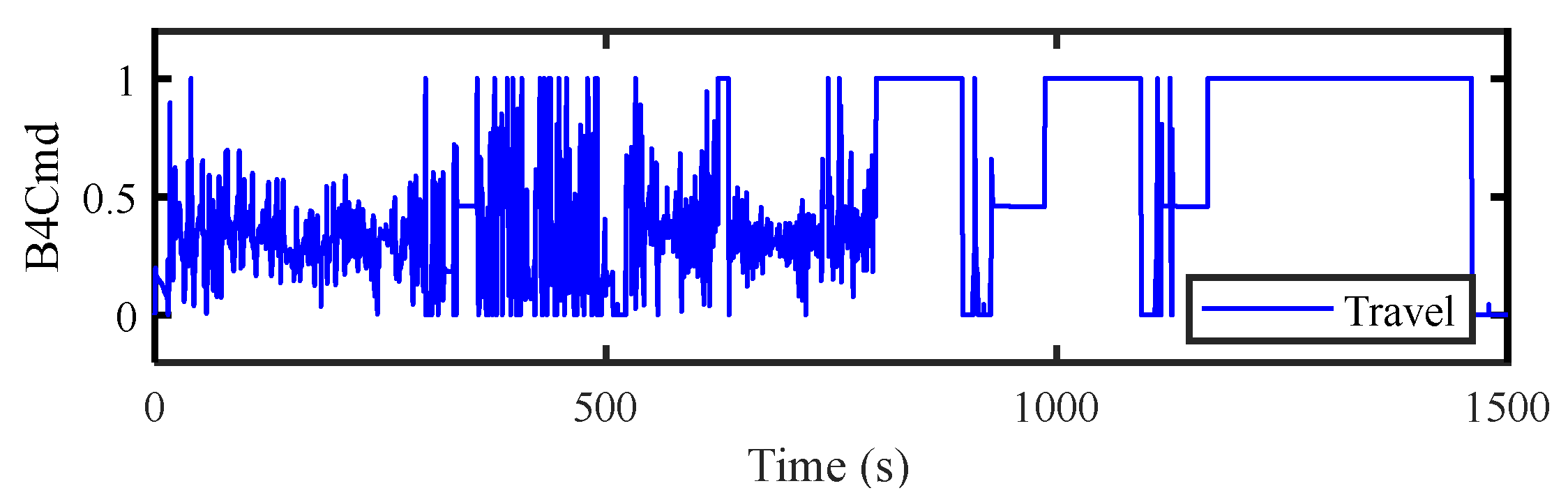
4.1. Analysis of Straight-Line Driving Conditions
4.1.1. Comparison of Straight-Line Driving Conditions
4.1.2. Straight-Run Failure Condition
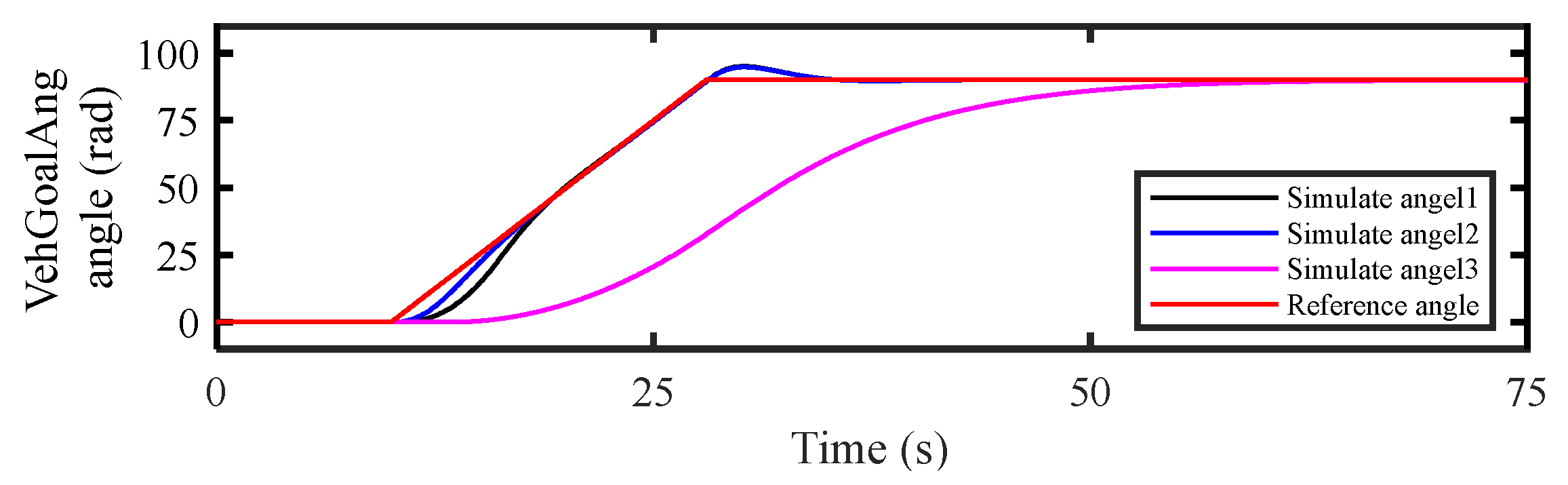
4.2. Analysis of Steering Driving Conditions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Qie, T.; Wang, W.; Yang, C.; Yang, C. A heavy-duty tracked vehicle model with a reduced feasible domain for motion tracking control considering dynamic characters of hybrid powertrain. Adv. Eng. Inform. 2024, 62, 102760. [Google Scholar] [CrossRef]
- Milićević, S.; Blagojević, I.; Milojević, S.; Bukvić, M.; Stojanović, B. Numerical analysis of optimal hybridization in parallel hybrid electric powertrains for tracked vehicles. Energies 2024, 17, 3531. [Google Scholar] [CrossRef]
- Li, R.; Fan, J.; Han, Z.; Guan, S.; Qin, Z. Configuration design and control of hybrid tracked vehicle with three planetary gear sets. J. Cent. South Univ. 2021, 28, 2105–2119. [Google Scholar] [CrossRef]
- Tan, Y.; Xu, J.; Ma, J.; Li, Z.; Chen, H.; Xi, J.; Liu, H. A transferable perception-guided EMS for series hybrid electric unmanned tracked vehicles. Energy 2024, 306, 132367. [Google Scholar] [CrossRef]
- Han, Z.; Liang, X.; Zhang, W.; Liu, Y.; Liu, J. Dynamic characterization and vibration response optimization of EMT system for tracked vehicles. Sci. Rep. 2025, 15, 12614. [Google Scholar] [CrossRef] [PubMed]
- Randive, V.; Subramanian, S.C.; Thondiyath, A. Component sizing of single and dual drive series hybrid electric powertrain for military tracked vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Djeziri, M.A.; Merzouki, R.; Bouamama, B.O.; Ouladsine, M. Fault diagnosis and fault-tolerant control of an electric vehicle overactuated. IEEE. Trans. Veh. Technol. 2012, 62, 986–994. [Google Scholar] [CrossRef]
- Richter, J.H.; Weiland, S.; Heemels, W.P.M.H.; Lunze, J. Decoupling-based reconfigurable control of linear systems after actuator faults. In Proceedings of the European Control Conference (ECC), Budapest, Hungary, 23–25 August 2009; IEEE: New York, NY, USA, 2009. [Google Scholar]
- Zhang, L.P.; Gong, D.L. Passive fault-tolerant control for vehicle active suspension system based on H2/H∞ approach. J. Vibroeng. 2018, 20, 1828–1849. [Google Scholar] [CrossRef]
- Zuñiga, M.A.; Ramírez, L.A.; Romero, G.; Alcorta-García, E.; Arceo, A. Passive fault-tolerant control of a 2-DOF robotic helicopter. Information 2021, 12, 445. [Google Scholar] [CrossRef]
- Indriawati, K.; Kurnianingtyas, R. Real-time implementation of passive fault-tolerant speed control for unloading MS150 DC motor system. In Proceedings of the E3S Web of Conferences, Pekanbaru, Indonesia, 23 September 2020; EDP Sciences: Les Ulis, France, 2020. [Google Scholar]
- Hou, Z.; Lee, C.K.M.; Lv, Y.; Keung, K.L. Fault detection and diagnosis of air brake system: A systematic review. J. Manuf. Syst. 2023, 71, 34–58. [Google Scholar] [CrossRef]
- Khaneghah, M.Z.; Alzayed, M.; Chaoui, H. Fault detection and diagnosis of the electric motor drive and battery system of electric vehicles. Machines 2023, 11, 713. [Google Scholar] [CrossRef]
- Abdoune, F.; Nouiri, M.; Cardin, O.; Castagna, P. An enhanced methodology of fault detection and diagnosis based on digital twin. IFAC-PapersOnLine 2022, 55, 43–48. [Google Scholar] [CrossRef]
- Qi, B.; Yang, L.; Zhang, L.; Zhang, R. Adaptive fault-tolerant control during the mode switching for electric vehicle dual-mode coupling drive system. Automot. Innov. 2021, 4, 56–69. [Google Scholar] [CrossRef]
- Guo, M.; Bao, C.; Cao, Q.; Xu, F.; Miao, X.; Wu, J. Fault-tolerant control study of four-wheel independent drive electric vehicles based on drive actuator faults. Machines 2024, 12, 450. [Google Scholar] [CrossRef]
- Zhou, Z.; Chen, M.; Zhang, G.; Shen, W.; Yang, R. Research on active fault tolerant control strategy for distributed drive electric vehicles based on multi-actuator failure. Eng. Lett. 2025, 33, 123–135. [Google Scholar]
- Zhou, Z.; Zhang, G.; Chen, M. A fault-tolerant control strategy for distributed drive electric vehicles based on model reference adaptive control. Actuators 2024, 13, 486. [Google Scholar] [CrossRef]
- Hernandez-Barragan, J.; Rios, J.D.; Alanis, A.Y.; Lopez-Franco, C.; Gomez-Avila, J.; Arana-Daniel, N. Adaptive single neuron anti-windup PID controller based on the extended kalman filter algorithm. Electronics 2020, 9, 636. [Google Scholar] [CrossRef]
- Huang, J.; Wang, J.; Fang, H. An anti-windup self-tuning fuzzy PID controller for speed control of brushless DC motor. Automatika 2017, 58, 321–335. [Google Scholar]
- Tahoun, A.H. Anti-windup adaptive PID control design for a class of uncertain chaotic systems with input saturation. ISA Trans. 2017, 66, 176–184. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Engine | Maximum power | 769.31 kW |
| Maximum torque | 1750 Nm | |
| Maximum rotational speed | 4200 rpm | |
| Moment of inertia | 2 kg·m2 | |
| ISG motor | Maximum power | 550 kW |
| Maximum torque | 700 Nm | |
| Maximum rotational speed | 20,000 rpm | |
| Moment of inertia | 0.5 kg·m2 | |
| Drive motor | Maximum power | 250 kW |
| Maximum torque | 3500 Nm | |
| Maximum rotational speed | 2500 rpm | |
| Moment of inertia | 4 kg·m2 | |
| Vehicle | Empty load mass | 35,000 kg |
| Wheel radius | 0.318 m | |
| Friction resistance coefficient | 0.06 | |
| Air resistance coefficient | 0.9 | |
| Windward area | 6 m2 |
| Model | Parameter | Value |
|---|---|---|
| Fault-free | Maximum vehicle speed | 95.3 km/h |
| Final acceleration | 0.14 m/s2 | |
| Single-side motor failure | Maximum vehicle speed | 63.5 km/h |
| Final acceleration | 0.05 m/s2 | |
| Degree of decline in dynamic performance | 33.37% | |
| Electric drive system failure | Maximum vehicle speed | 53.5 km/h |
| Final acceleration | −0.12 m/s2 | |
| Degree of decline in dynamic performance | 43.86% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, Q.; Zhang, Z.; Li, X.; Qin, D.; Peng, Z. Fault-Tolerant Control of the Electro-Mechanical Compound Transmission System of Tracked Vehicles Based on the Anti-Windup PID Algorithm. Machines 2025, 13, 622. https://doi.org/10.3390/machines13070622
Xing Q, Zhang Z, Li X, Qin D, Peng Z. Fault-Tolerant Control of the Electro-Mechanical Compound Transmission System of Tracked Vehicles Based on the Anti-Windup PID Algorithm. Machines. 2025; 13(7):622. https://doi.org/10.3390/machines13070622
Chicago/Turabian StyleXing, Qingkun, Ziao Zhang, Xueliang Li, Datong Qin, and Zengxiong Peng. 2025. "Fault-Tolerant Control of the Electro-Mechanical Compound Transmission System of Tracked Vehicles Based on the Anti-Windup PID Algorithm" Machines 13, no. 7: 622. https://doi.org/10.3390/machines13070622
APA StyleXing, Q., Zhang, Z., Li, X., Qin, D., & Peng, Z. (2025). Fault-Tolerant Control of the Electro-Mechanical Compound Transmission System of Tracked Vehicles Based on the Anti-Windup PID Algorithm. Machines, 13(7), 622. https://doi.org/10.3390/machines13070622