4.2. Positioning Optimization Experiment
- (1)
Target Localization Scheme
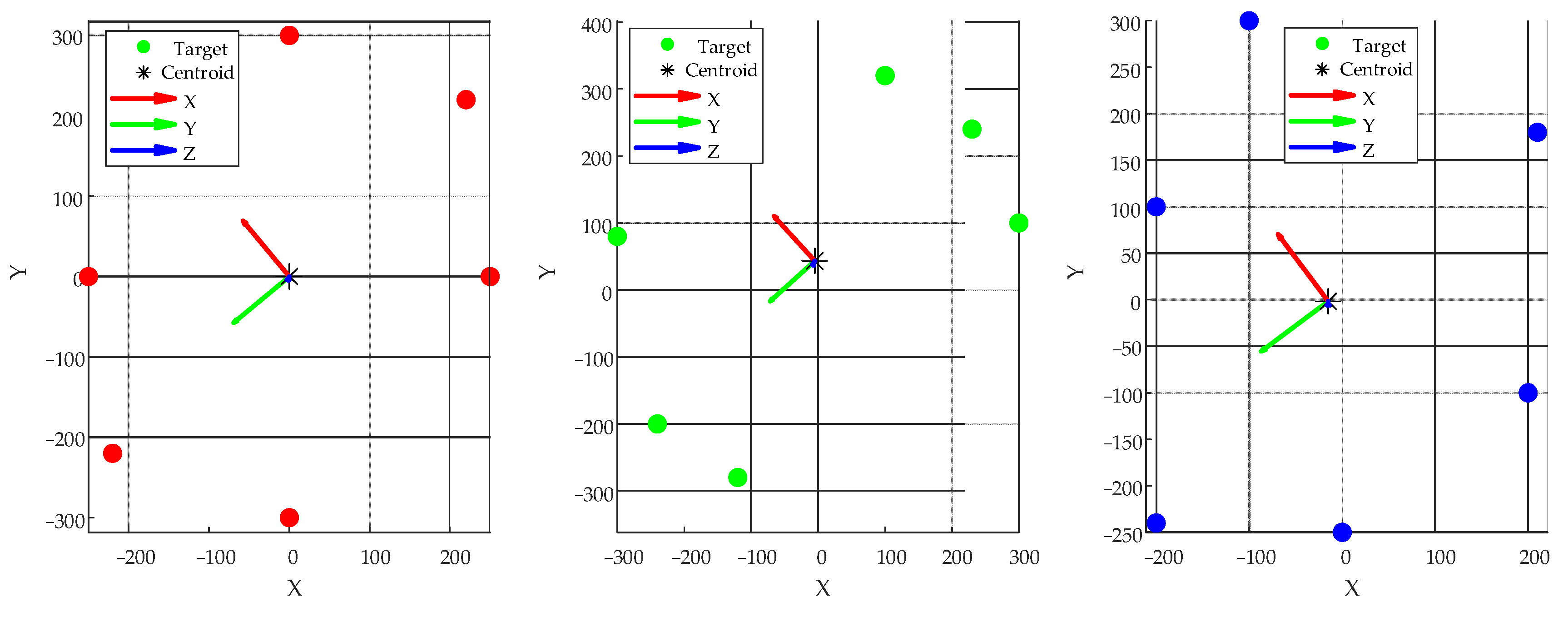
The feasibility and advantages of the multi-objective optimization method based on four non-coplanar magnetic targets were validated through non-dominated sorting simulations. This method was evaluated for direct localization of workpieces on a six-degree-of-freedom adjustment platform. The overall experimental scheme consists of five parts: “Scheme Construction,” “Evaluation Metric Definition,” “Non-dominated Sorting Optimization,” “Visualization Implementation,” and “Result Analysis.” For each scheme, four targets were selected to define the coordinate transformation in space. A total of five schemes were tested, as shown in
Table 9:
To simultaneously evaluate the performance of “localization cost” and “spatial coverage,” two objective functions are defined:
The cost metric represents the average distance from the targets to the origin. A smaller value indicates smaller platform translation and rotation. The coverage metric reflects the dispersion of the target distribution; it is defined as the sum of all pairwise distances. After negation, a smaller value corresponds to better coverage.
The five schemes were ranked into hierarchical levels (Pareto fronts) using the non-dominated sorting algorithm from NSGA-II. Dominance relations were first determined: scheme p dominates scheme
q if
p is no worse than
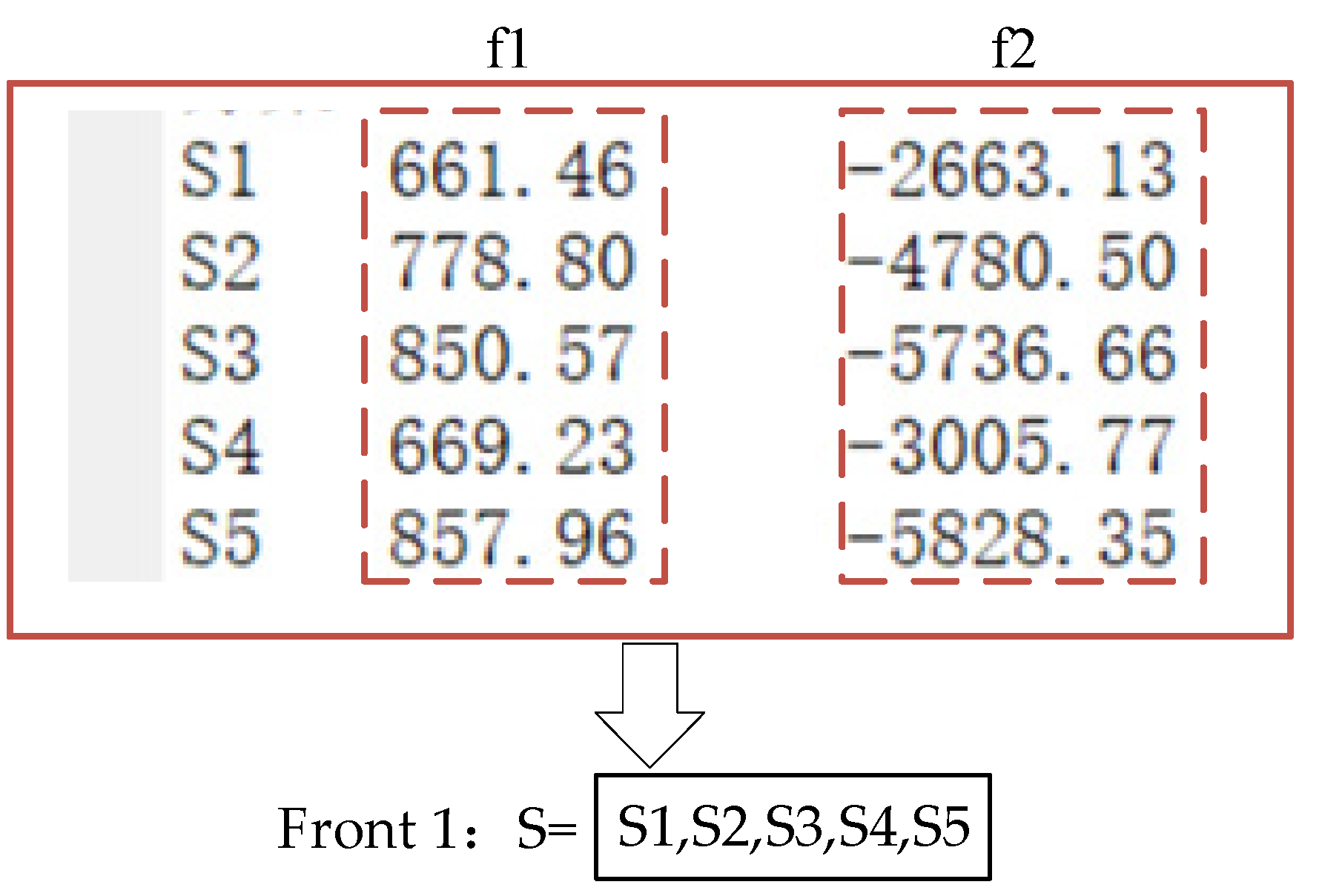
q in both target objectives and strictly better in at least one objective. For each scheme, the domination count and domination set were recorded. Schemes with a domination count of zero were assigned to Front 1. After removing these, subsequent fronts (Front 2, Front 3, etc.) were generated iteratively. The resulting target objective values and the Pareto front 1 solutions are shown in
Figure 17.
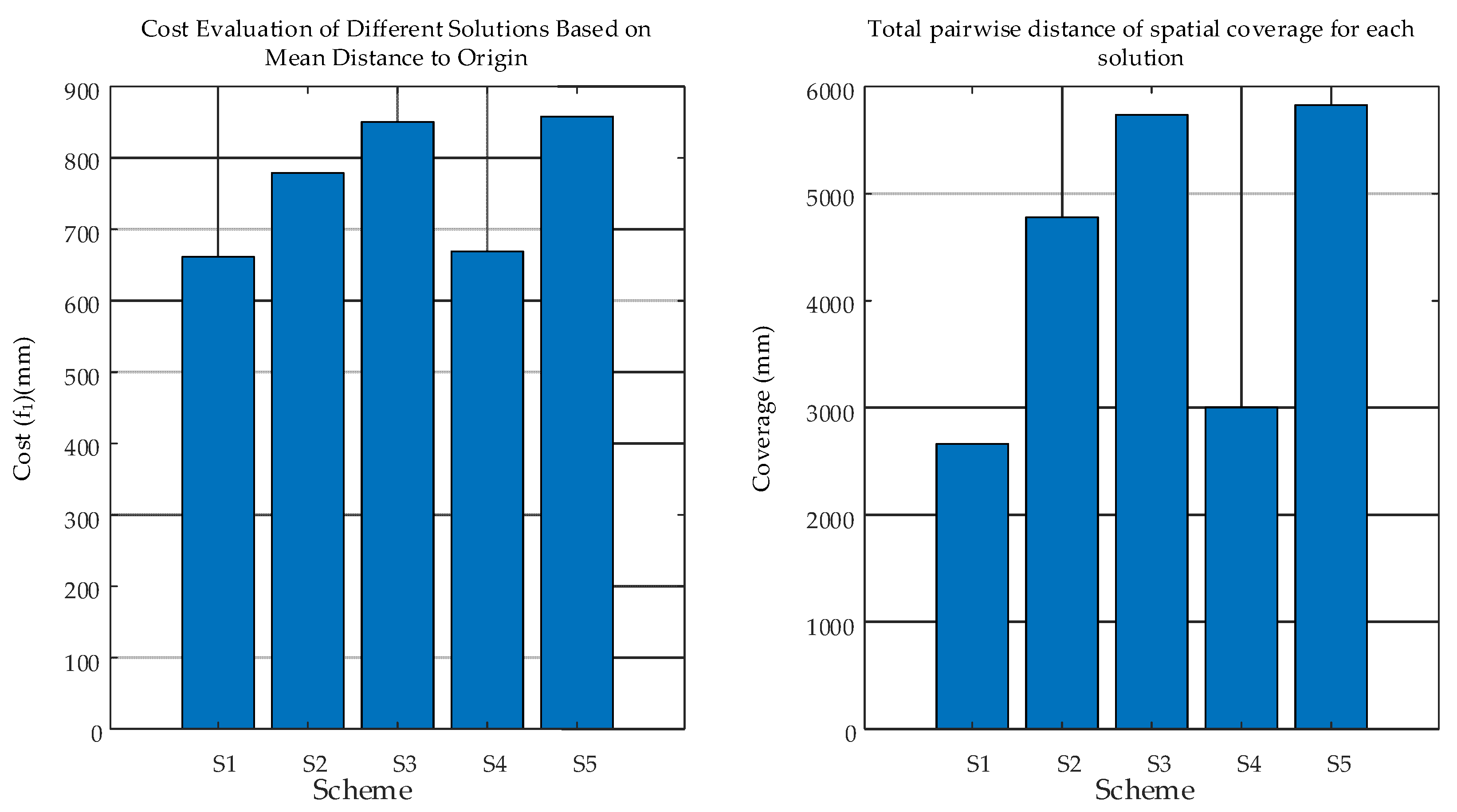
The coverage metrics generated by the five target schemes are shown in
Figure 18.
Based on the non-dominated sorting method in NSGA-II, the “localization cost” (average distance from each target to the origin) and “spatial coverage” (sum of all pairwise distances among four targets) were calculated for five four-point non-coplanar target layout schemes. The coverage metric was converted into a minimization objective by setting f2 = −coverage. Then, using domination relations defined by DomCount and DomSet, the schemes were quickly classified into Front 1 and Front 2. The four schemes S1, S2, S4, and S5 in Front 1 were non-dominated with respect to both cost and coverage objectives. Visualization with bar charts showed that S2 had the lowest cost, S5 had the highest coverage, while S1 and S4 represented the extremes of “low cost, low coverage.” It was concluded that these four layouts in Front 1 achieve the best trade-off between cost and coverage with a minimum of four target points, making them optimal choices for workpiece coordinate calibration on the six-degree-of-freedom adjustment platform.
- (2)
Crowding Distance Experimental Analysis
To further evaluate the “diversity” of solutions within the Pareto front, the crowding distance was calculated for each target localization scheme. A larger crowding distance indicates that the solution is more “isolated” in the objective space and thus exhibits better diversity. Boundary points are assigned an infinite crowding distance to ensure their preferential retention. The calculation results are presented in
Table 10.
The data in the table show that S1 and S5 attain extreme values at opposite ends of the objectives, with S1 having the lowest cost (661.46 mm) and S5 the highest coverage (5828.35 mm). Consequently, both are assigned infinite crowding distances to ensure their retention. Among the boundary solutions, S2 has the largest crowding distance (1.786), indicating it is the most isolated and achieves the best trade-off between cost (778.80 mm) and coverage (4780.50 mm). S4 follows closely with a crowding distance of 1.266, representing another preferred option with relatively low cost (669.23 mm) and moderate coverage (3005.77 mm). S3 has the smallest crowding distance (0.734), indicating it is the most crowded with the least diversity and is completely dominated by S5 in terms of coverage, thus belonging to the suboptimal set.
- (3)
Target Localization Optimization Scheme
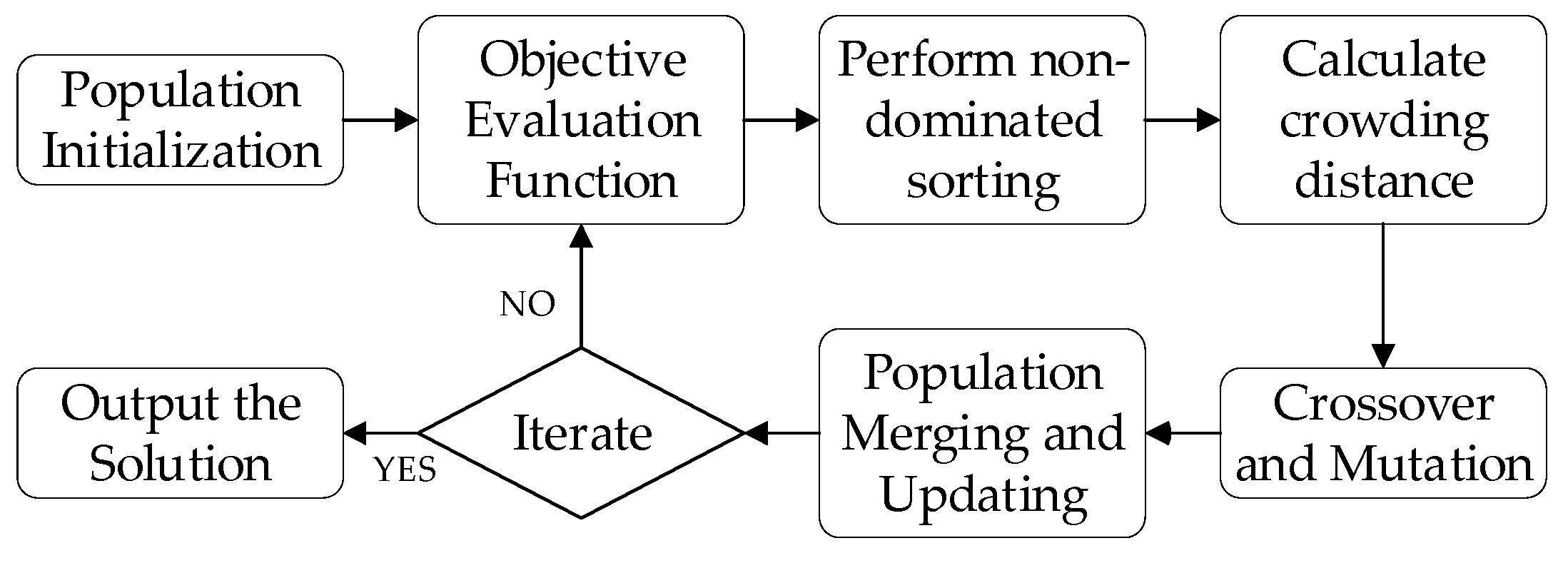
In MATLAB, the initial population is formed by the four-point 3D coordinates of all five candidate schemes, and the two objective functions (average distance to the origin and the negation of the sum of pairwise distances) are calculated. The standard NSGA-II iterative process is then initiated: in each generation, the population is first divided into Pareto fronts via non-dominated sorting, and crowding distances are calculated. Subsequently, binary tournament selection based on the front ranking and crowding distance is performed to select five parent individuals.
Then, the parent pairs undergo crossover using SBX operators with distribution indices
and
, respectively, generating five pairs of offspring. All offspring are then subjected to perturbation via polynomial mutation operators with distribution indices
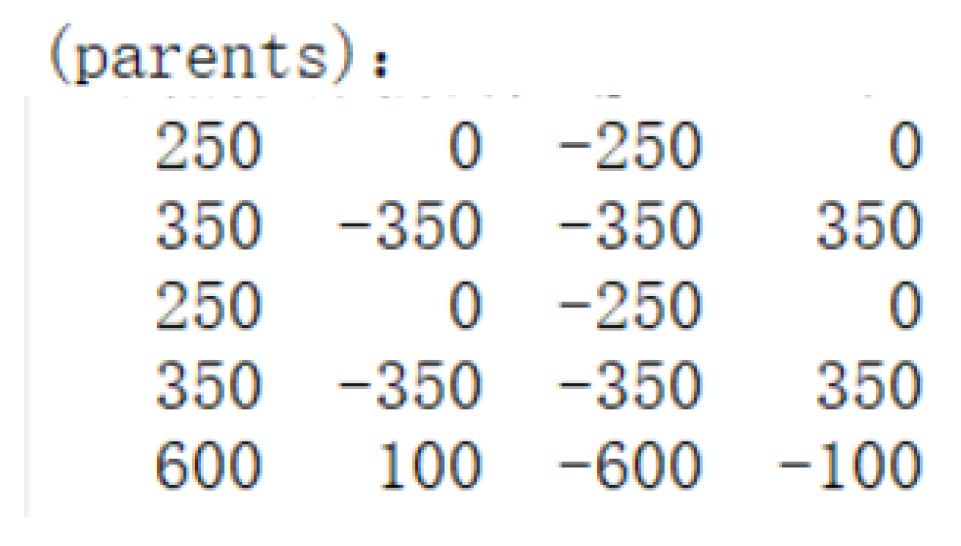
. After merging the parent and offspring populations into ten individuals, non-dominated sorting and crowding distance calculations are performed again. The top five individuals are selected as the next generation based on Pareto front ranking priority and descending crowding distance. This process is repeated until convergence or the preset number of iterations is reached. The resulting parent indices are shown in
Figure 19.
In the binary tournament selection, the five parent individuals correspond sequentially to schemes S1, S2, S1, S2, and S5. Notably, S1 and S2, which have the largest crowding distances in Front 1, were each selected twice, indicating their significant contribution to maintaining solution diversity. The boundary solution S5 was also selected once due to its extremal characteristic (highest coverage). This selection strategy ensures the inheritance of high-quality solutions while enhancing population diversity. Consequently, the Pareto front of the new generation maintains stability at the original endpoints and introduces one to two new non-dominated solutions, demonstrating that the combined effects of crossover and mutation operators effectively expand the front boundaries and improve global search capabilities. This provides a richer and more uniformly distributed solution set for online optimization of the six-degree-of-freedom adjustment platform.
The solutions obtained for the next generation via MATLAB are shown in
Table 11 and
Table 12.
Starting from five initial schemes composed of four non-coplanar magnetic targets, the NSGA-II algorithm sequentially performs multi-objective calculation, fast non-dominated sorting, and crowding distance assignment. Parent individuals are selected via binary tournament based on Pareto front ranking and crowding distance. Offspring are then generated using Simulated Binary Crossover and subjected to polynomial mutation. Finally, parents and offspring are merged and undergo another round of non-dominated sorting and crowding distance filtering. The next generation of five solutions is selected according to front priority and crowding distance, as shown in
Table 12. This realizes an end-to-end simulation of the core workflow for target localization distribution optimization based on the NSGA-II algorithm.
4.3. Positioning Accuracy Test
- (1)
Field of View Coverage Analysis
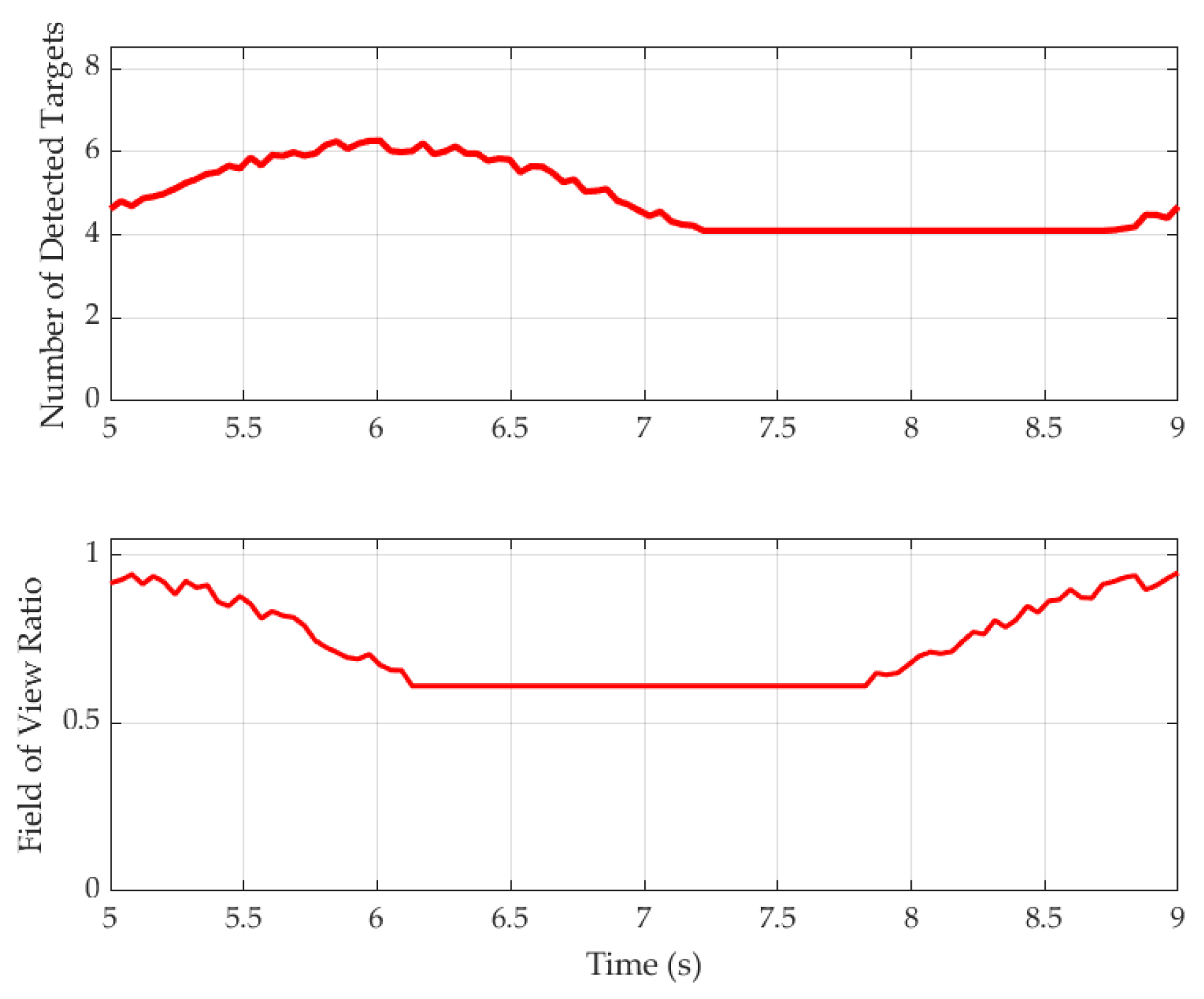
Figure 20 illustrates the visibility of magnetic targets and the platform’s field of view coverage over time during dynamic rotations of the six-degree-of-freedom adjustment platform. The horizontal axis in
Figure 20 represents the variation over time, while the vertical axis indicates the visibility of magnetic targets and the field of view coverage of the platform. Between 5 and 9 s, the platform performs periodic small-angle pose adjustments around the X and Y axes. To validate the effectiveness of the optimized target placement strategy, eight magnetic targets were uniformly distributed on the platform surface. Real-time simulations were conducted to calculate the number of targets successfully tracked by the optical tracker at each time instant, as well as the field of view coverage coefficient corresponding to whether the platform center lies within the visual cone.
As shown in
Figure 20, the number of visible targets remains between 4 and 8 throughout the entire motion, never falling below the minimum required number of targets (4) for pose estimation, thereby ensuring continuous and effective pose tracking during platform movement. Meanwhile, the platform’s field of view coverage coefficient remains above 0.6, reaching nearly 1.0 at its peak, indicating that the platform consistently stays within the optical system’s effective observation range without experiencing complete occlusion or tracking loss. This experiment validates the optimized target placement scheme’s stability, robustness, and pose observability under dynamic occlusion conditions, providing strong theoretical support for subsequent dynamic localization.
- (2)
Localization Accuracy
To evaluate the improvement in localization accuracy of magnetic targets during dynamic pose adjustments of the six-degree-of-freedom platform, a comparative experiment on dynamic translation error was designed. The experiment recorded the instantaneous translation errors of the platform during continuous motion under two conditions: with and without magnetic targets deployed. Error trends were plotted to intuitively compare the impact of the target placement strategy on platform localization accuracy, thereby validating the accuracy advantage and robustness of the proposed method in dynamic tracking scenarios.
Figure 21 presents the comparison of platform translation errors during dynamic motion. It can be observed that when targets are deployed (blue solid line), the translation error is concentrated between 0.05 mm and 0.2 mm, with a maximum error not exceeding 0.25 mm, demonstrating high repeatability and accuracy assurance. In contrast, the case without deployed targets (red dashed line) exhibits greater fluctuations, with maximum errors approaching 0.8 mm and frequent sporadic jumps. Overall, the comparison indicates that target deployment not only enhances platform localization accuracy but also effectively suppresses error drift caused by measurement uncertainties.
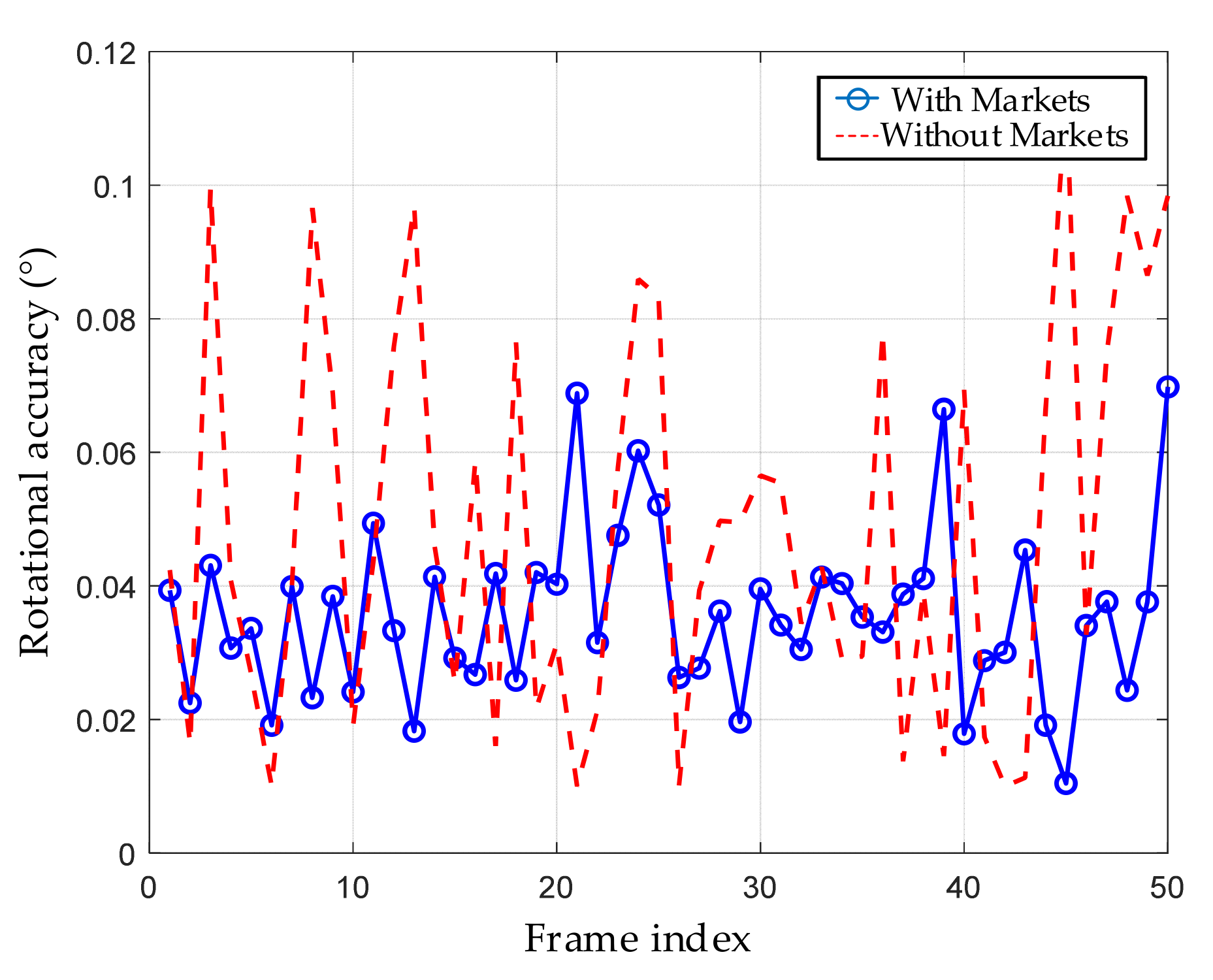
Figure 22 presents a comparison of real-time rotational localization errors of the six-degree-of-freedom platform under dynamic rotation conditions. The blue solid line represents the rotational error when magnetic targets are deployed, while the red dashed line corresponds to the error without target deployment. It can be observed that with targets deployed, the platform’s rotational error remains between 0.015° and 0.07°, with an average error of approximately 0.035°, and exhibits low fluctuation, demonstrating good stability. In contrast, although the platform without targets still maintains some pose estimation capability, the error fluctuations increase significantly, with a maximum rotational error approaching 0.11° and an average error around 0.055°. This indicates that the absence of external reference targets significantly impairs the accuracy and consistency of platform rotational estimation.
To verify the differences in localization accuracy of the target placement schemes under realistic small perturbations, 50 simulations of rotational and translational disturbances were conducted for schemes S1, S2, and S3 based on the coordinate system construction method and NSGA multi-objective optimization approach. The rotational and translational errors were then statistically analyzed. The results are as follows:
As shown in
Table 13, all three target layout schemes maintained low levels of rotational and translational errors across 50 disturbance simulations. The rotational mean errors were controlled between 0.034° and 0.036°, while the translational mean errors ranged from 0.095 mm to 0.102 mm, all within the acceptable tolerance for dynamic tracking of large-scale structures. Among them, Scheme S3 demonstrated slightly better performance in both rotational error (mean: 0.034°, maximum: 0.067°) and translational error (mean: 0.095 mm), indicating greater pose robustness under disturbance conditions.
This advantage can be attributed to the more uniformly distributed spatial configuration of the targets in S3, which results in a more rigid and stable coordinate frame under small perturbations. Although the overall differences among the three schemes are relatively small, S3 exhibited more concentrated error statistics (i.e., the smallest difference between maximum and mean errors), further validating that the NSGA-optimized solution achieved a favorable trade-off among multiple objectives. These results not only confirm the feasibility of the multi-objective target optimization strategy but also provide quantitative reference for practical deployment.
This trend is further supported by the pairwise t-tests shown in
Figure 23, where although the p-values between S3 and the other schemes do not reach statistical significance, they show near-threshold differences suggestive of a potential trend.
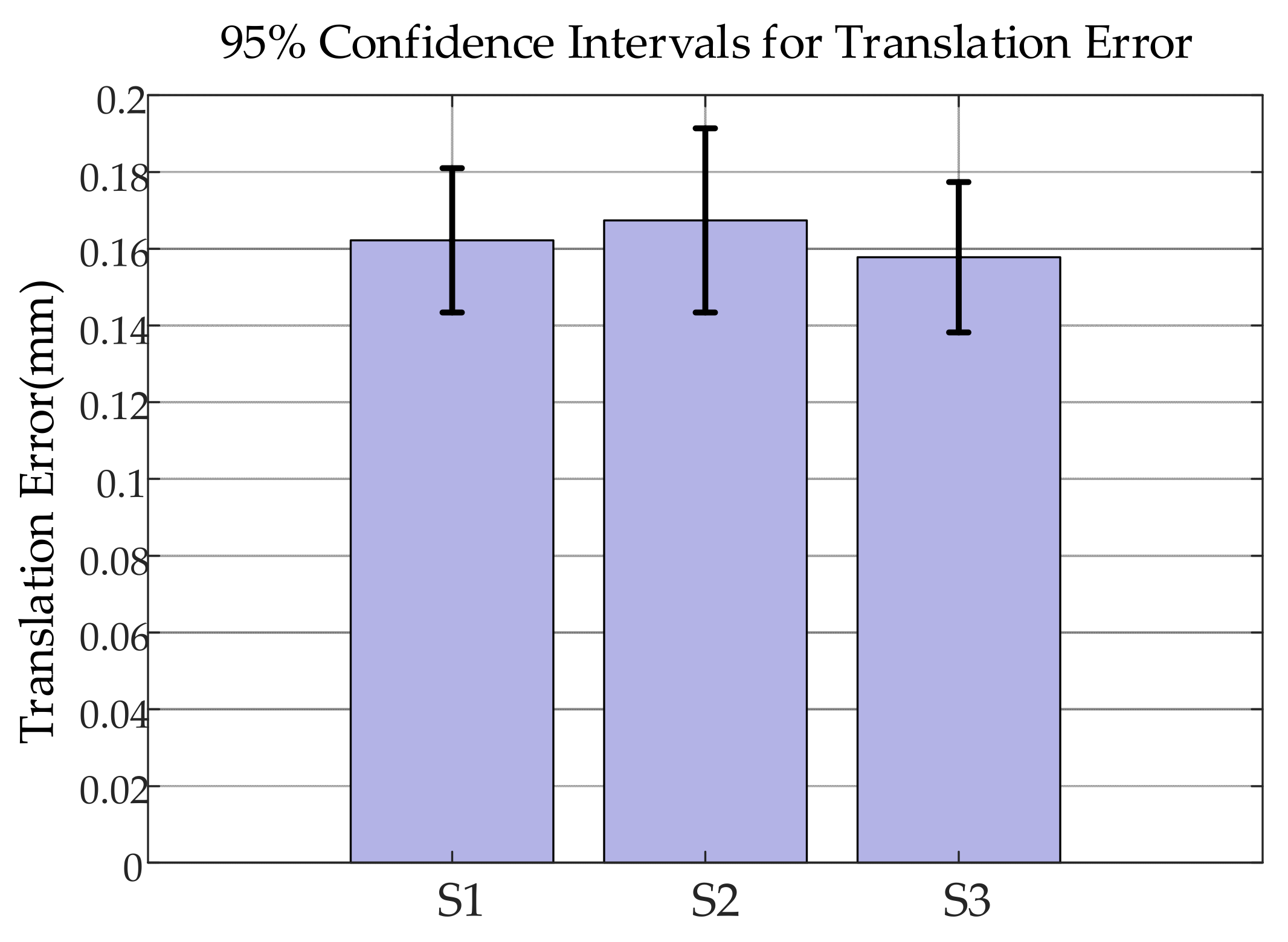
Subsequently, the 95% confidence intervals were calculated using Student’s t-distribution, as shown in
Figure 23 and
Table 14.
Although higher than the nominal accuracy of 0.025 mm of the optical tracker, the errors remain well below the maximum allowable error of 0.25 mm, satisfying the dynamic scanning requirements for large-sized workpieces. Furthermore, paired t-tests between the schemes (S1 vs. S2, S2 vs. S3, and S1 vs. S3), as shown in
Figure 24, yielded
p-values in the range 0.05 <
p < 0.08, indicating statistically significant differences in localization accuracy among the three target placement schemes.
As shown in
Figure 24, all three pairwise t-tests yield
p-values greater than 0.05 (0.07352, 0.05227, and 0.07335), indicating that the differences in positioning accuracy among the three target layout schemes are not statistically significant at the α = 0.05 level. Among them, the
p-value between S2 and S3 is 0.05227, which is close to the significance threshold, suggesting a potential trend of difference, but still insufficient to support a conclusion of statistical significance.
Although there is partial overlap among the confidence intervals of the three groups, the S3 configuration exhibits the narrowest interval and the smallest overall offset, indicating a more concentrated error distribution and more stable pose estimation performance. This tighter confidence interval also corroborates the results in
Table 11, where S3 shows the smallest average and maximum error difference, which can be attributed to the more uniform spatial tension in its target layout. In conjunction with the pairwise t-test results shown in
Figure 24, although none of the three configurations show statistically significant differences (
p > 0.05), the
p-value for the S2 vs. S3 comparison (0.05227) is close to the significance threshold (α = 0.05), exhibiting marginal significance. This suggests that under certain operating conditions, the S3 configuration may be more suitable for dynamic scenarios requiring higher stability in pose accuracy. In summary, by integrating confidence interval analysis and pairwise t-tests, the potential advantages of the S3 configuration in pose accuracy and robustness are further validated. This also highlights the effectiveness and practicality of the NSGA-II optimization in selecting balanced solutions for multi-objective problems. The analysis strengthens the credibility of the experimental results and provides quantitative guidance for future configuration selection.
The MATLAB simulation was conducted on a workstation equipped with an Intel i5-11400H CPU and 32 GB of RAM (Intel Corporation, Santa Clara, CA, USA). A complete NSGA-II optimization process (with a population size of 50 and 100 iterations) took approximately 13.7 s on average. The visibility assessment of magnetic targets and the calculation of pose error were completed within 200 milliseconds, meeting the requirements for near real-time optimization and scheduling.
- (3)
3D Scanning Path Points
Based on the author ‘s last published article [
20], by scanning the targets, the overall scanning positions of the 3D scanner on the workpiece under static conditions are derived. The initial scanning position of the 3D scanner is (789.48, −125.04, 499), with a scanning angle of 6.12°. The coordinates of the scanning points traversed by the 3D scanner are listed in
Table 15.
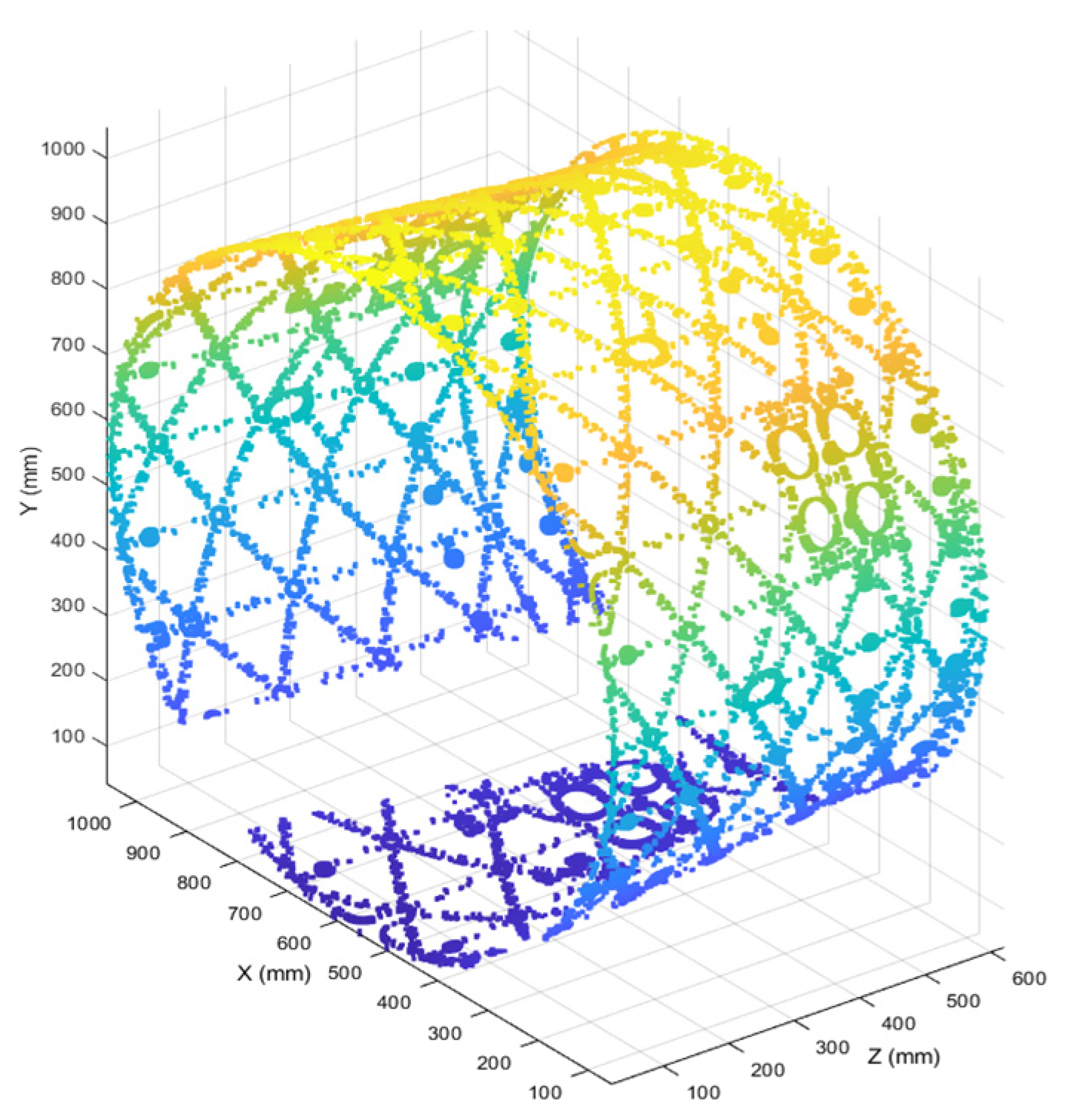
The resulting point cloud still contains missing regions, as shown in
Figure 25.
The number of points obtained after dynamic rotation of the workpiece is shown in
Table 16. Comparing
Table 15 and
Table 16 reveals that the number of scanning points required by the 3D scanner is significantly reduced after dynamic rotation. This effectively improves the scanning efficiency of the 3D scanner while maintaining the same point cloud reconstruction rate.
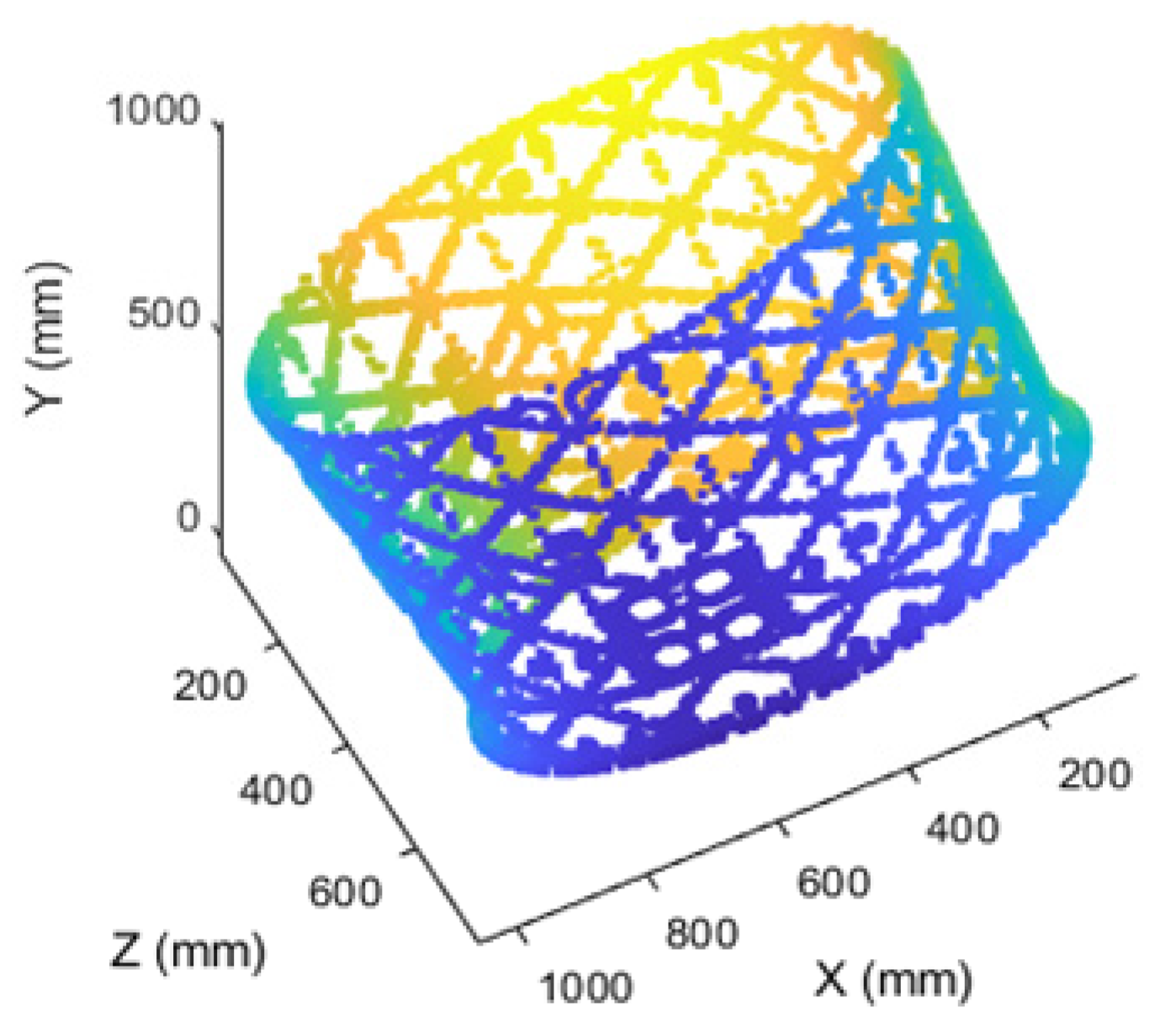
The missing regions in the point cloud after rotating the workpiece can be addressed by adjusting the pose of the six-degree-of-freedom platform for rescanning. The point cloud after rescanning is shown in
Figure 26.
Compared to the original scheme, the optimized approach reduces the number of points by 25%, corresponding to an approximate 33.3% improvement in scanning efficiency. This significantly lowers the scanning cost.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}