1. Introduction
Given the complexity of control design tasks, it is necessary to respect not only the boundaries of system quantities, but also the limitations of system parameters and the balance of conflicting goals. Such a class of systems includes positive systems [
1,
2], with hard parametric constraints on the elements of the dynamics matrix of Metzler systems [
3], where most of the procedures that are valid for linear systems [
4,
5,
6] cannot be used due to the requirement of their diagonal stabilization [
7]. In these applications, significant simplifications can be achieved by exploiting the principle of diagonal parameterization of the strictly Metzler matrix [
8], combining the quadratic Lyapunov function with the definition of constraints in the form of linear matrix inequalities (LMI). If the description of the system dynamics does not have a strictly Metzler matrix structure (ostensible Metzler systems), or if the positivity of the input matrix parameters varies depending on the operating environment [
9], there is a risk of reduction or loss of the positive properties of the system.
System faults are dangerous for practical systems; because they can drastically change the behavior of the system, it is necessary to design control structures to correct the behavior of the system at least within the range of acceptable degradation. Fault-tolerant control (FTC) schemes provide procedures that improve system tolerance to certain classes of faults [
10,
11]. The motivation comes from the fact that the most common model-based fault detection approaches use state observers to construct residual fault signals [
12,
13,
14]. In standard control structures of multi-agent systems, controller faults can be transmitted to neighboring agents; thus, a single fault in one agent can cause a cascade of subsequent faults. The principle of early detection of small loss of actuator gain characterizes new trends in FTC. It should be noted that the principles presented in [
15,
16,
17] cannot be used to directly solve the problem of detecting faults in ostensible Metzler systems because they do not support the constraints defined by the ostensible structure of Metzler matrices.
Another interesting class is linear positive switched systems, consisting of a set of linear strictly positive subsystems, where the active subsystem is defined by a switching signal [
18]. Their mathematical models for diagnostic purposes are usually given via discrete-time representation and the synthesis is linked to the linear programming technique [
19,
20], which implies stability conditions using a linear co-positive Lyapunov functional [
21,
22]. These results can only be marginally used for non-switching positive systems as a special case because they are limited in estimating the constrained and distributed states [
23,
24]. The same difficulties in FDF design and fault detection in positive complex network structures can be noted in [
25,
26,
27,
28] and in stochastic linear dynamical systems, such as positive Markov jump systems, whose structures or parameters may change probabilistically at a certain transition [
29,
30,
31].
This paper deals with the design of a fault detection filter (FDF) for ostensible linear Metzler systems. New conditions for the stability of the FDF based on the system state observer are formulated using a set of LMIs, taking into account the norm of the FDF transfer function matrix. Given the necessity of diagonal stabilization of the state observer, the proposed approach uses a suitable form of decomposition of the ostensible Metzler matrix and defines parametric constraints for the one of the separated matrices that is strictly Metzler. The FDF scheme is based on the Luenberger observer, which generates residuals with high sensitivity to small losses in the actuator gain, which is guaranteed by the dynamic properties of the strictly Metzler part of the observer state dynamics. Considering applications in network control structures, the problems are also reformulated and solved in the context of linear discrete-time ostensible positive systems. The parameterized matrices of this form of FDFs are constructed by solving the corresponding set of LMIs; the Lyapunov method forms the basis of stability analyses under the required positivity and synthesis conditions with given parameter bounds. A linearized model of the B747-100/200 aircraft is used to illustrate the proposed procedure and present its properties. Considering stability in the presence of actuator gain loss, the FDF is designed as a quadratic stable observer with ostensible Metzler dynamics. The most likely extension of the presented approach appears to be the area of fault detection of systems, whose mathematical models have the characteristics of structures that temporarily overlap with those of the structures of linear ostensible Metzler systems.
The paper is organized in the following order. Following the properties of linear strictly positive systems presented in
Section 2, the parametric bounds and representation approaches for linear, continuous-time ostensible Metzler systems and linear, discrete-time ostensible positive systems are given in
Section 3. The application of the
FDF design principle to these classes of systems is given in
Section 4. To illustrate the proposed digital implementation of FDFs, essential results are demonstrated on an example in
Section 4 and concluding remarks are given in
Section 6.
For convenience, the notations used in this document reflect common convention: , denote the transpose of the vector x, and the matrix X, respectively; denotes the (block) diagonal matrix; for a square symmetric matrix, denotes its negative definiteness; denotes the n-th order identity matrix; and denote the inverse matrix and the eigenvalue spectrum of a square matrix X; the maximal positive real part of the eigenvalue spectrum of X is denoted by ; denotes a vector whose elements are all 1; for a real matrix, means that its components are non-negative; () denotes the set of (non-negative) real numbers; () refers to the set of (non-negative) real matrices; () denotes the set of strictly (ostensible) Metzler matrices.
2. Consequences of Internal System Positivity
This section deals with internally positive linear, time-invariant systems described by state–space realizations for
and
where
,
are non-negative,
,
are non-negative and with a suitably chosen sampling period
If
is strictly Metzler, all its diagonal elements are negative and its off-diagonal elements are strictly positive, then
is strictly positive (all its elements are strictly positive) [
32], i.e., their elements have parametric bounds
and according to (
3) these matrix parameterizations imply:
Lemma 1 (Parameterization of
,
[
33]).
For , , the following statements hold equivalentlyfor the notationswhere is the circulant form of a permutation matrix [
34].
The following remark is a slightly generalized characterization of the parametric representation of the boundaries of positive systems.
Remark 1. If the matrix is represented in the equivalent rhombic formsthen, in the sense of (
5)
, the diagonal matrices are defined by the diagonals (
6 (i)), (
6 (ii))
such that for , As a result, the structural constraints (
3)
of the Metzler matrix can be equivalently formalized asad the structural constraints (
3)
of the strictly positive matrix can be formalized as Moreover, for example with , the following holdsand these circular shift operations do not change the existing definiteness of diagonal matrices. Analogously, these procedures can be applied to (8) and (9) using , in constructions with multiple circular shifts. The defined constructions of positivity constraints reflect the dual formulation of the state control design conditions and the system state estimation conditions, necessary with respect to the parameterization of system dynamics matrices in positive systems. Diagonal formulations follow from the restriction that positive systems are only diagonally stabilized [
35].
Theorem 1 ([
36])
. In limiting the positivity of Luenberger state observers onwith (c) , , or (d) , , , diagonal parameterization is prescribed using the diagonal matrices , , , and diagonal parameterization is prescribed using the diagonal matrices , , , constructed so thatand the observer system matrices , are The parameterization defined in this way does not guarantee that the strictly Metzler matrix is Hurwitz, or that the strictly positive matrix is Schur. In the Lyapunov sense, these matrices must still have a solution for a positive definite diagonal matrix .
Regarding the control design task, the dual parameterization process is obvious, where the duality of positive parameterization yields.
3. Ostensible System Characterization
Let the matrix
in the system (
1) be an ostensible Metzler matrix. Then, since
is not strictly Metzler, the autonomous part of the system
is not internally positive.
Definition 1. A matrix is ostensible Metzler if there is at least one negative off-diagonal element in the structure A while the number of positive off-diagonal elements of A is predominant and all diagonal elements of the matrix A are negative.
Theorem 2 ([
37])
. If for U is prescribed in the formwith , , , then the eigenvectors U and V are identical andwhere are the eigenvalues of V and are the eigenvalues of U.
By exploiting the above property, the compatibility of the parametric bounds of the ostensible Metzler matrix
can be achieved by using the constructive separation
where
is strictly Metzler and
is element-wise negative and Hurwitz. This concept transforms the synthesis task for ostensible Metzler systems into the synthesis task for strictly Metzler systems, parameterizing
by its rhombic diagonals.
Lemma 2 ([
38])
. For ostensible Metzler there exists a strictly Metzler and an element-wise negative and Hurwitz satisfying (17) with relation to positive scalars only if The parameterization defined in this way does not guarantee that the desired ostensible Metzler matrix is Hurwitz. In the Lyapunov sense, this matrix must still have a solution for a positive definite diagonal matrix .
Corollary 1. When working with from (1), it is necessary to define ostensible positivity constraints for and obtain a strictly positive matrix and a strictly negative and Schur matrix . If a solution satisfying Lemma 2 is known for the parameters of a continuous-time system from (1), the simplest way is to use the definite relations for the conversion of the system description and calculate the parameters according to the relations (2) as follows:where is a suitably chosen sampling period. Subsequently, the structural constraints will be automatically satisfied.
The parameterization defined in this way does not guarantee that the ostensible positive matrix is Schur.
In the Lyapunov sense, this matrix must still have a solution for a positive definite diagonal matrix .
To complete the above procedures, it is necessary to find J, H such that is ostensible Metzler and Hurwitz and is ostensible positive and Schur.
4. Design of Fault Detection Filters
Let the description of the faulty state of the system be extended
where
,
the cores of FDFs are state observers
Using the estimation errors
,
, then from (
26), (
27) follows
with
,
and respecting principle of constructive separation (
17), then
where
must be strictly Metzler and Hurwitz,
is element-wise negative and Hurwitz,
must be strictly positive and Schur and
is element-wise negative and Schur.
By defining the form of the residual weighting depending on the observer error innovation, the additive fault detection filters are defined as
where the weight matrix
is a positive definite diagonal matrix.
Using (
30), it is possible to derive design conditions for FDF parameters considering only a pair of parameters
or
.
Theorem 3. (30) is stable with ostensible Metzler and Hurwitz matrix if for a strictly Metzler matrix and non-negative , there exist positive definite diagonal matrices , and a positive scalar such that for and the following set of LMIs is feasible: When the above conditions hold, the strictly positive observer gain matrix is computed as Hereafter, ∗ is a symmetric entry in a symmetric matrix.
Proof. For a positive definite diagonal matrix
,
and an upper bound on the
norm
,
of the disturbance transfer function matrix the Lyapunov function has the form
and under this assumption, it must hold
If
is not considered when substituting (
30) into (
36), then
and the redefinition with respect to
means that (
37) prescribes a solution in bilinear form
which, using the Schur complement property, can be linearized as
Analogously to (
13), the following notations can be set
and using (
41) then (
40) defines (
34).
Multiplying the left-hand side (
14c) for
by the matrix
Q and applying it to
, the following condition arises
and with (
41) then from (
42) it follows the first inequality in (
32).
Analogously, pre-multiplying the left-hand side by
Q and post-multiplying the right-hand side by
, then (
14c), for
and any
gives
and (
41), (
43) give the rest inequalities in (
32). This concludes the proof. □
The basic idea is to construct a residual signal that remains at zero (or below a certain threshold) before the occurrence of a fault and reaches a non-zero value higher than a given threshold at the onset of the fault, allowing the fault to be detected.
Theorem 4. (30) is stable with ostensible positive and Schur matrix if for a strictly positive matrix and non-negative , there exist positive definite diagonal matrices , and a positive scalar such that for and the following set of LMIs is feasible: When the above conditions hold, the strictly positive observer gain matrix is computed as Proof. For a positive definite diagonal matrix
,
and an upper bound on the
norm
,
of the disturbance transfer function matrix, the Lyapunov function has the form
and under these assumptions the forward difference of Lyapunov function at the time instant
i must satisfy
When substituting (
30) into (
49) not considering
then
and the redefinition with respect to
means that (
50) prescribes a solution
Consequently,
which, using the Schur complement property, can be written as
Analogously to (
41), the following notations can be set
and using (
55), (
54) defines (
46).
Analogously to (
43), pre-multiplying the left-hand side by
P and post-multiplying the right-hand side by
then (
14d) for
and any
gives
and (
55), (
56) give the inequalities in (
45).
Based on the potential tuning optimization of the parameter , this also allows for a relatively simple way of determining the detection threshold. This concludes the proof. □
Corollary 2. For the design of a continuous-time Luenberger observer with ostensible Metzler and Hurwitz matrix in a disturbance-free environment () or the design of a discrete-time Luenberger observer with ostensible positive and Schur matrix from Theorems 3 and 4, it follows: where strictly positive gain matrices J, H are calculated as defined.
Remark 2. In the presented paradigm of continuous-time residual filter design, matrix inequalities (32) express parametric constraints imposed in the design on a strictly Metzler matrix , (33) prescribes the asymptotic stability of the observer, and diagonal matrix variables in (31) reflect the principle of diagonal stabilization. Analogously, in the design of a discrete-time residual filter, the matrix inequalities (45) express the parametric constraints given in the design for a strictly positive matrix , (46) prescribes the asymptotic stability of the observer, and the diagonal matrix variables in (44) reflect the principle of diagonal stabilization. In both cases, the diagonal weight matrix is optimized with respect to the norm of the input disturbance transfer function matrix.
The threshold computation for additive fault detection and isolation can be solved as an optimization problem by [
39].
5. Illustrative Example
To illustrate the effectiveness of the approach, an apparent Metzler linear system (
1) is used for the stable linearized B747-100/200 aircraft model [
40] with nominal and derived model matrices given by
Choosing
= 0.005
and for the resulting
with the prescribed
D-parameter of the
D-stability region
the value of the tuning parameter will be
, which implies the strictly negative and Hurwitz matrix
,
and the unstable diagonally corrupted Metzler matrix
,
which solves the required separation of the matrix
A.
Since parameterization is necessary to address the consistency of design constraints, manipulation according to (
5), (
12) yields:
and solving the set of inequalities within (
31)–(
33) gives
The corresponding strictly positive observer gain is determined as
and the desired fault detection filter is obtained with the parameterized matrices as follows:
prescribing a strictly Metzler and Hurwitz matrix
and an ostensible Matzler and Hurwitz matrix
. while the residual gain is optimized as
Note that the positions of the negative off-diagonal elements in are preserved and the elements of the third columns in remain the same due to the specified structure of the matrix C.
All the results are obtained by SeDuMi package [
41], implemented in Matlab R2018a.
As expected, a stable strictly Metzler part of the observer is designed which produces asymptotical observer state responses and aperiodically reacted actuator fault residuals.
For the simulation phase, the control law rule for
is as
with gains
K [
15],
W and desired output
w of the form
and setting the initial conditions
.
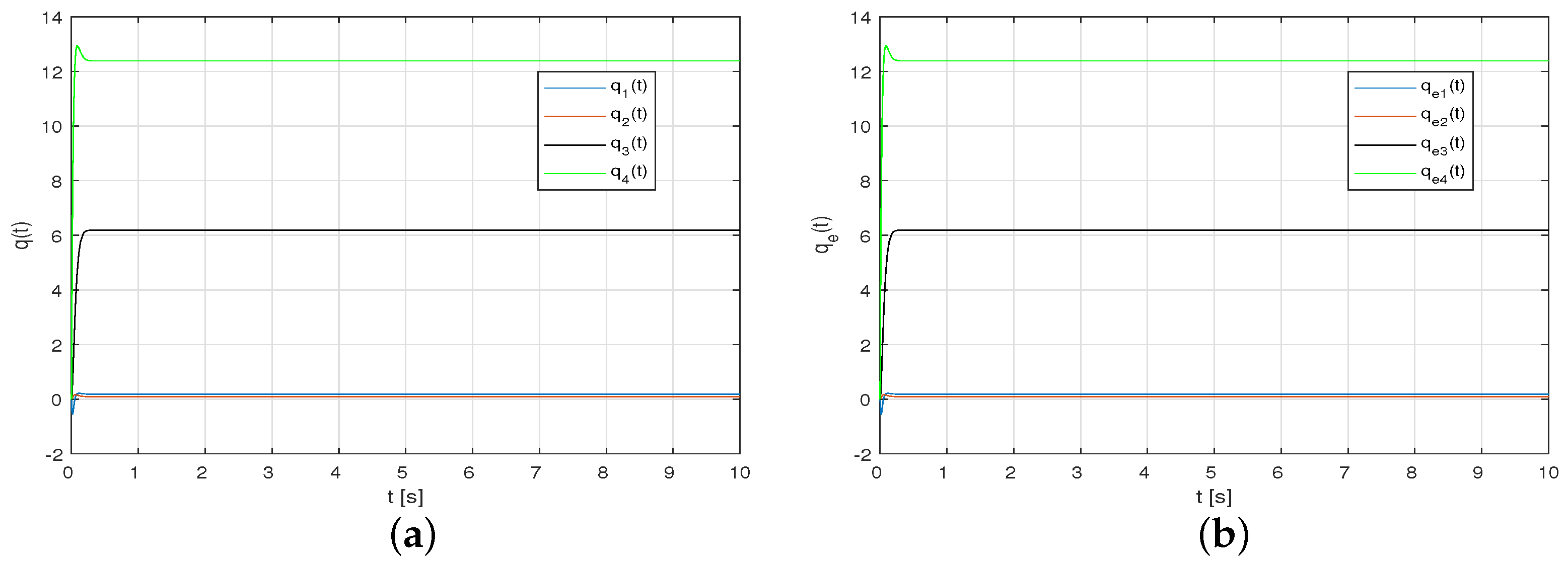
The simulations results are presented in
Figure 1 and
Figure 2, where
Figure 2 shows the evolution of the residual signals generated by the residual disturbance filter in response to a step loss of gain of the second actuator
, starting its operation at time
. It is clear from
Figure 1 that such a small change in gain is practically not reflected in the time expressions of the state variables and their estimated values. The cases of loss of gain of other actuators are manifested analogously.
In the discrete-time model, the matrix parameters are rewritten into expressions corresponding to (
25), with the guarantee of preserving all parametric constraints, such that, with
s
Analogously, by constructing the required diagonal parameterization
and solving LMIs according to Theorem 4
and with the strictly positive observer gain, it is
when constructing for
Simulations with the discrete-time model structure show no significant change in terms of the residual signals presented in the figures of this section and confirm the effectiveness of this scheme as well.
The properties of the state estimator remain valid even in the case of the lossless actuator gain regime, which is characterized by zero values of the FDF outputs.
6. Conclusions
The article generalizes a design framework for constructing FDFs for linear, continuous-time ostensible Mezler systems and for linear, discrete-time ostensible positive systems. The LMIs-based design, which takes into account the parametric constraints and quadratic stability of the state-based observer FDF, exploits the ostensible matrix separation of the system dynamics to apply the diagonal stabilization principle for strictly Metzler systems. Such a philosophy means constructing a set of LMIs based on diagonal matrix variables only for a separated strictly Metzler dynamics matrix such that their fulfillment guarantees a separated state observer dynamics in the form of a strictly Metzler and Hurwitz matrix, while the remaining part of the observer dynamics is determined by a strictly negative and Hurwitz matrix. For potential use in the diagnosis of ostensible positive systems in network structures and distributed systems, the observer design problem for fault detection is defined and solved for linear ostensible positive systems with discrete-time state models. For the FDF design problem for these classes of models, conditions for the existence of such an FDF are established, where the required FDF parameter matrices can be easily determined from the solution of the matrix variables of the set of LMIs.
Using the example of a linearized model of the B747-100/200 aircraft, it is shown that the FDF with such a defined parameter design is able to detect relatively small gain losses of the actuators of the linear ostensible Metzler system, while all the aforementioned design constraints are mutually conditional.
Special cases of these problems may arise in various contexts related to actuator failure detection in the class of distributed multi-agent systems based on ostensible Metzler agents or in actuator failure detection in unmanned aerial vehicles (UAVs) because they are modeled by temporally overlapping forms with ostensible Metzler structures. All of these problems are currently being addressed by the authors.



{kind=link}
{kind=link}