




On the Integration of Complex Systems Engineering and Industry 4.0 Technologies for the Conceptual Design of Robotic Systems
 , , , , and
, , , , and 
Abstract
1. Introduction
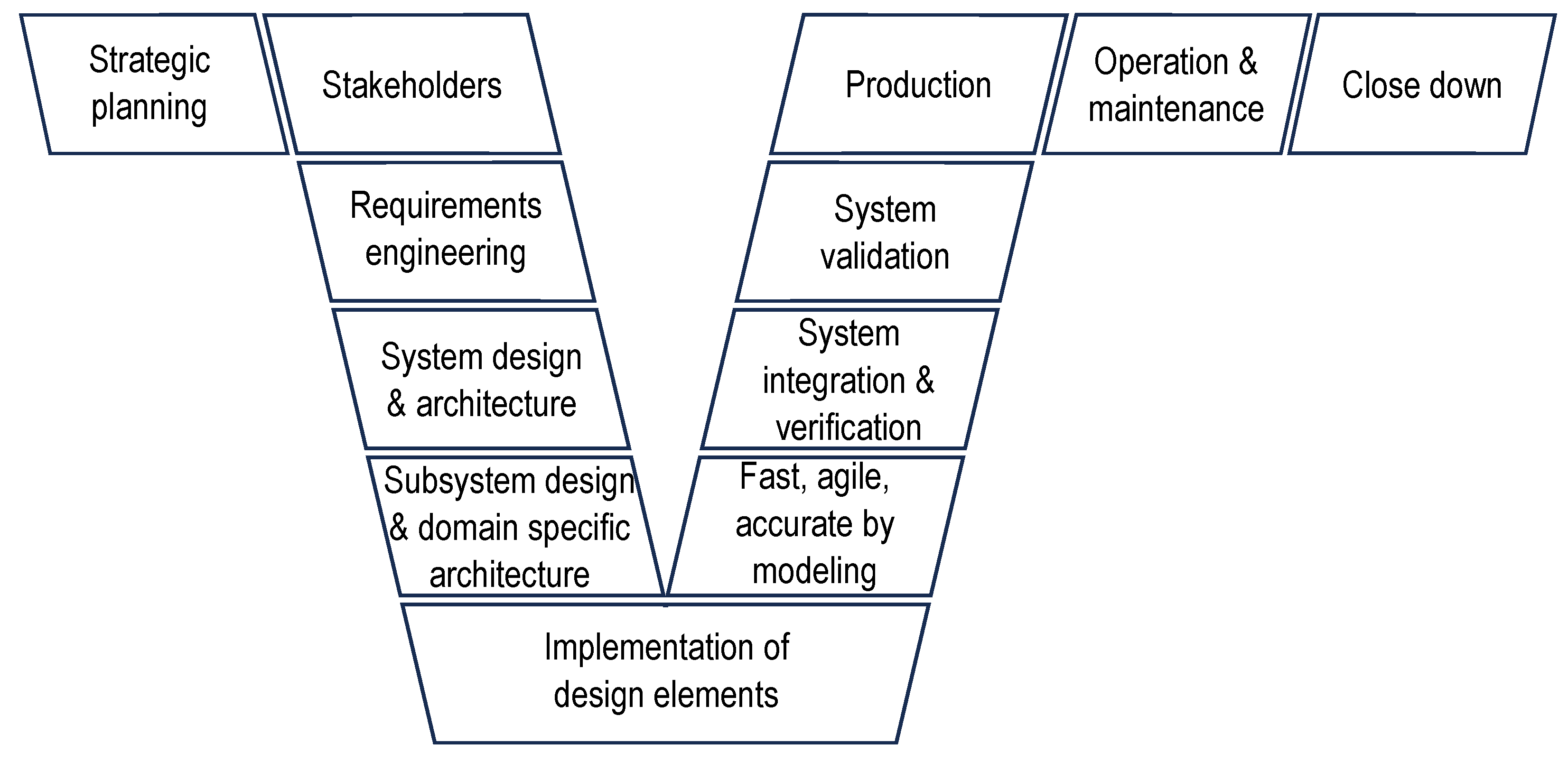
2. Systems Engineering
3. Industry 4.0
3.1. Industrial Revolutions
3.2. I4.0 Technologies and Their Functionalities
4. Remotely Operated Vehicles
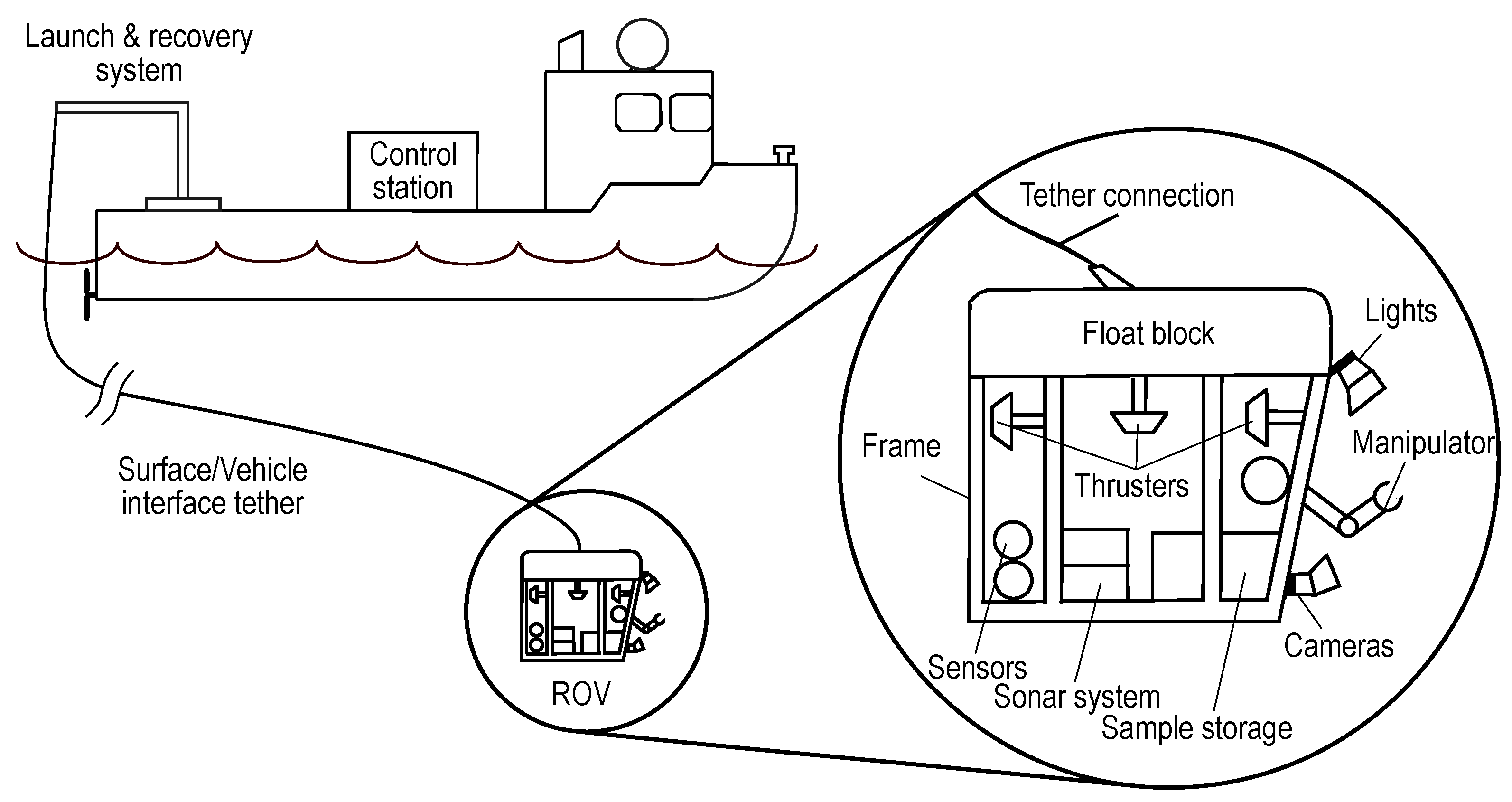
4.1. Description of ROV Systems
4.2. SE and I4.0 Integration for ROV Development
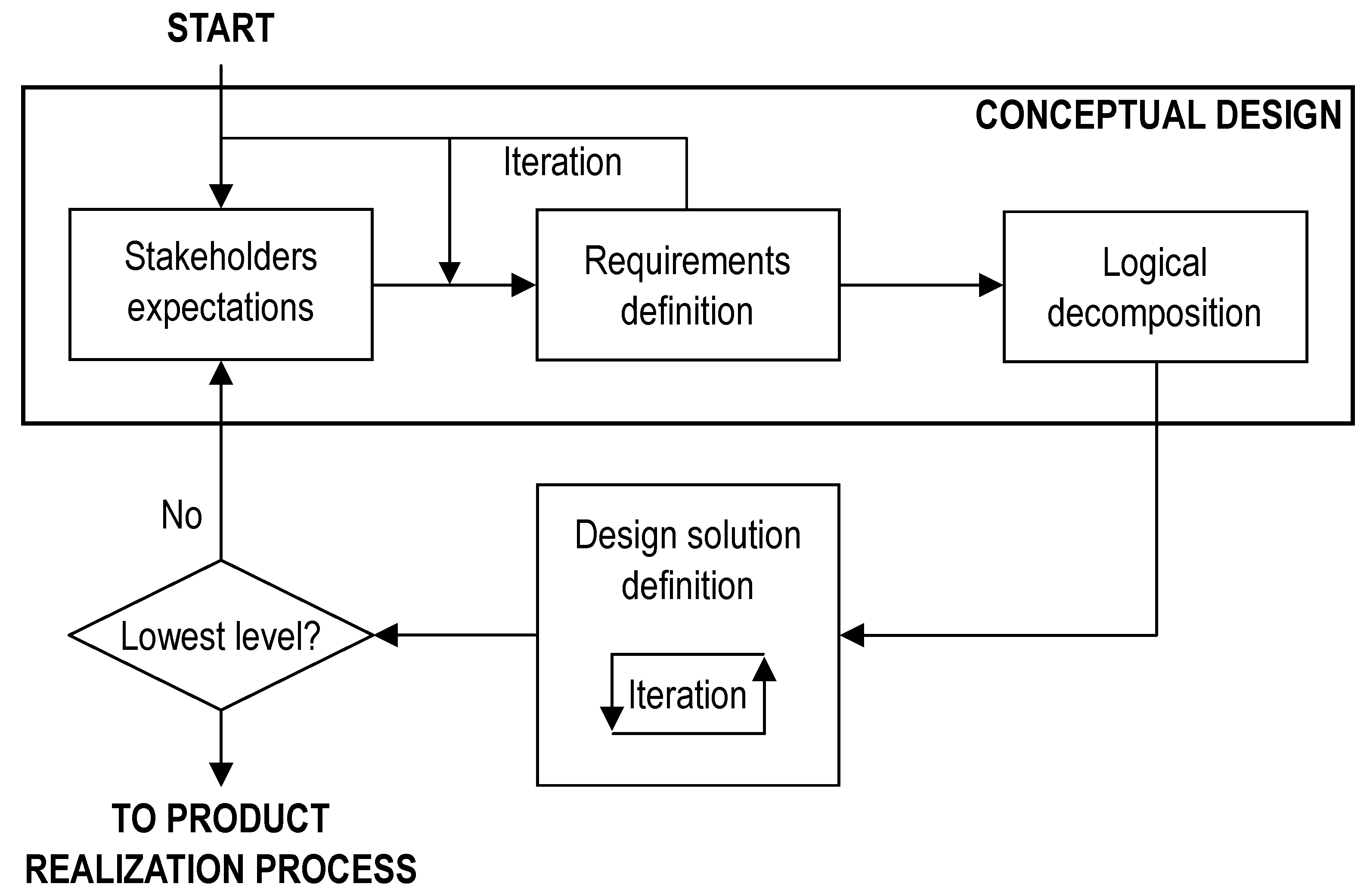
5. Conceptual Design Methodology
5.1. Stakeholder Expectations
5.2. Requirements Definition
5.3. Quality Function Deployment-House of Quality
5.4. Logical Decomposition
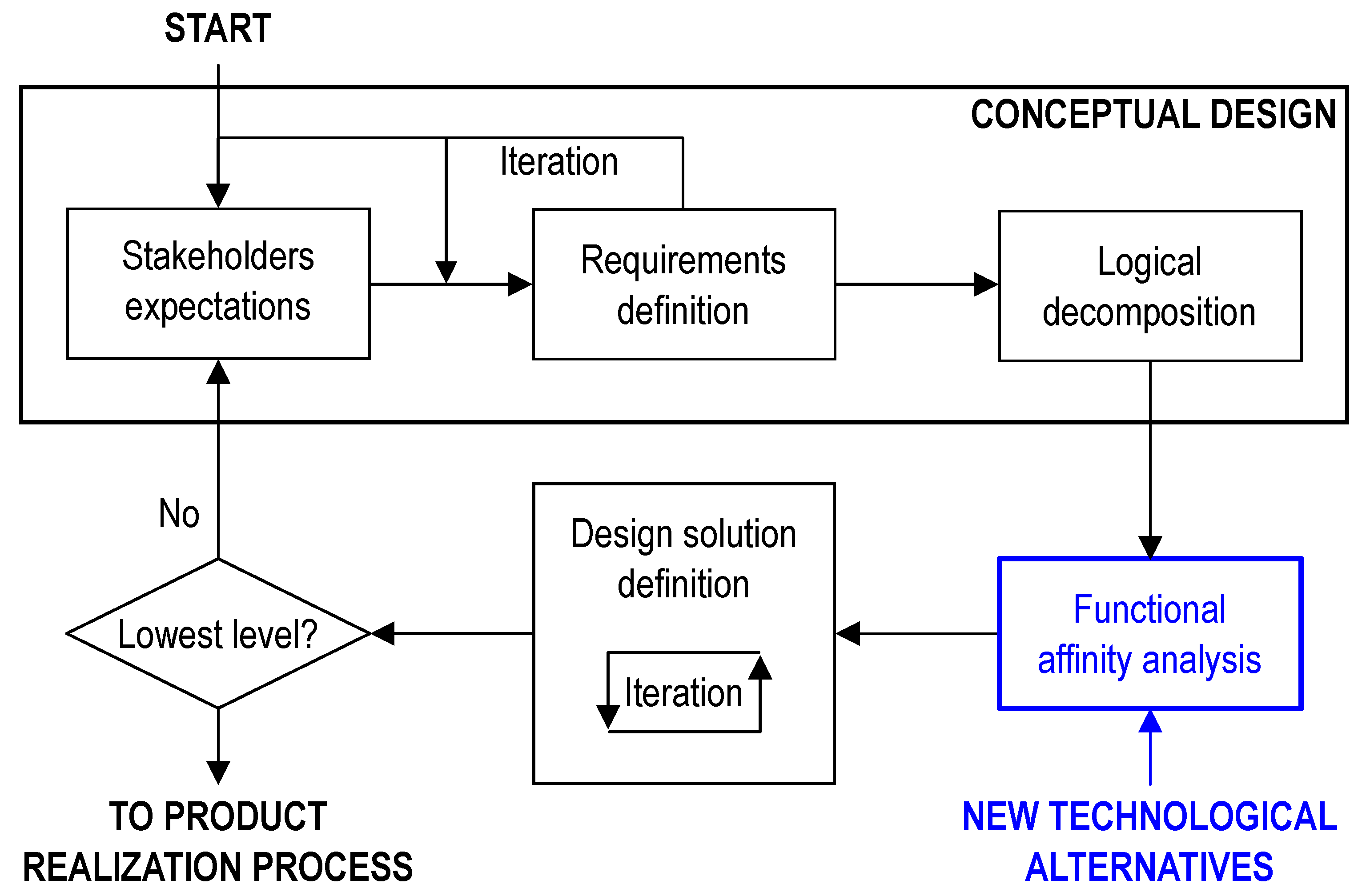
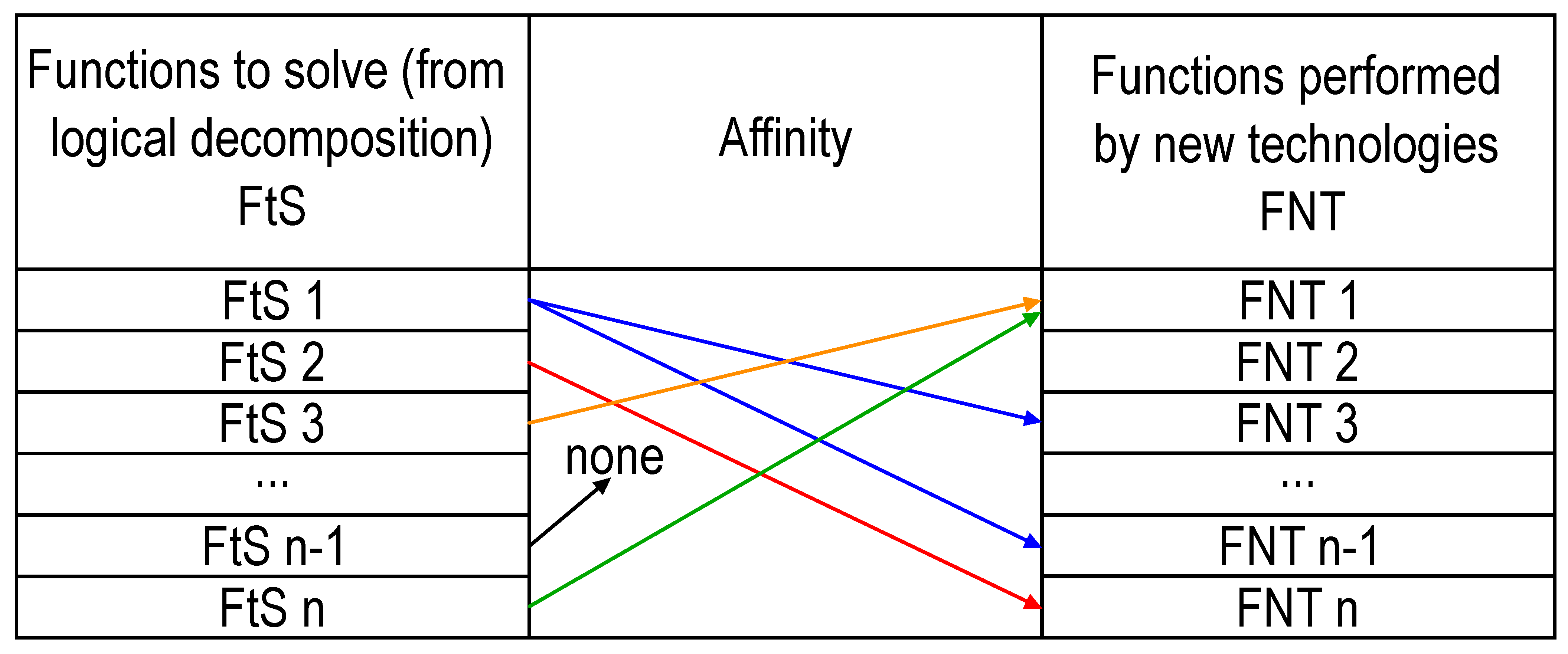
5.5. Functional Affinity Analysis
6. Case Study: Conceptual Design of an Underwater Exploration System
6.1. Stakeholder Expectations
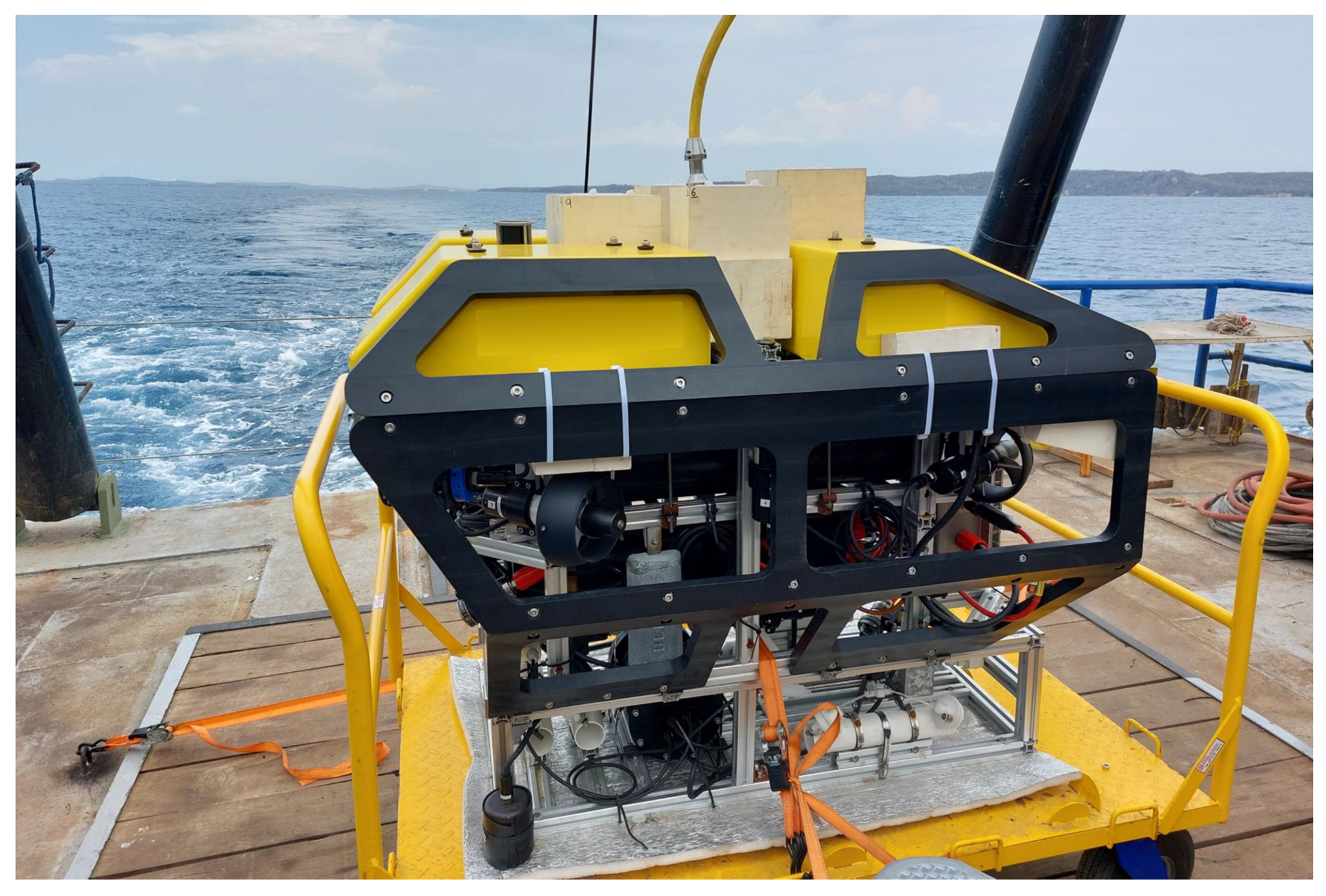
- The Remotely Operated Vehicle (ROV) is an experimental observation system designed for underwater exploration in the ocean, up to 500 m deep. Its main functions include capturing high-quality images and video of the sea floor and collecting solid and liquid samples.
- The ROV is compact and lightweight, with a mass between 100 and 300 km. It features a video system able to capture and display multiple videos simultaneously, instead of having to switch between cameras. It also includes multiple power and data connections, and a lighting system adapted for underwater conditions. The design emphasizes minimal power consumption and high-speed data transmission.
- The ROV is targeted at markets involved in hydrocarbon exploration and marine scientific studies. Its data transmission capabilities are enhanced with the potential for real-time data, depending on the availability and mission-specific requirements. The design ensures easy operability with minimal personnel, and its sample collection capacities are optimized within the vehicle’s physical limitations.
6.2. Requirements Definition
6.3. Quality Function Deployment—House of Quality
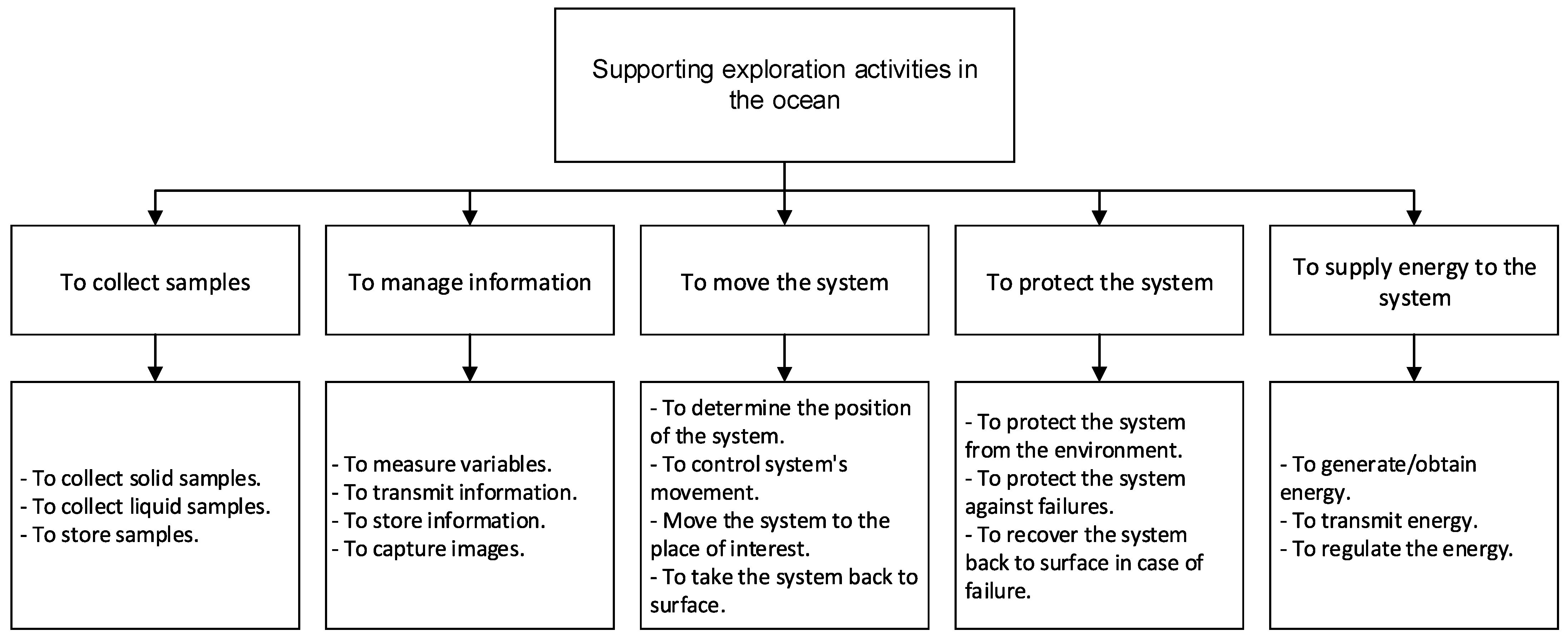
6.4. Logical Decomposition
- To collect physical samples. This functional group is responsible for collecting and storing water samples as well as solid samples. As in any other complex system, this function is not isolated, and depends on the fulfillment of other functions to achieve its goals. It highlights the interdependent nature of system functions, relying on precise movement and data management to successfully collect and catalog samples.
- To manage information. This function deals with all the data sent from the control room to the robot. It also manages the data generated from sensors and components and brings them to the surface. Data needs to be collected, transmitted, classified, stored, and retrieved. From the point of view of I4.0, this functional group would be the heart of the system.
- To move the system. No meaningful sample or data can be obtained if the ROV is not located in the desired exploration area. This functional group deals with tasks related to bringing the robot into the water, as well as moving the robot through the water until it reaches the place where samples are going to be taken and back to the surface/support vessel. Determining ROV position and orientation is also a task of this functional group.
- To protect the system. An ROV has interactions with other systems (support vessel, launch and recovery system, etc.) and with the environment (water, waves, currents, reefs, rocks, sand, etc). There are also internal failures that need to be addressed. Active and passive protection must be performed from possible damages. This functional group includes: protecting against failures, protecting from the environment, and recovering procedures if something fails.
- To supply energy. Powering the ROV’s mission, this function deals with the generation, regulation, and distribution of energy to various components. Given the diverse energy needs of the ROV’s systems (from propulsion to sensors), this group is tasked with ensuring a reliable energy supply under varying operational conditions, addressing challenges such as energy efficiency and the distribution of power to optimize mission duration and capability.
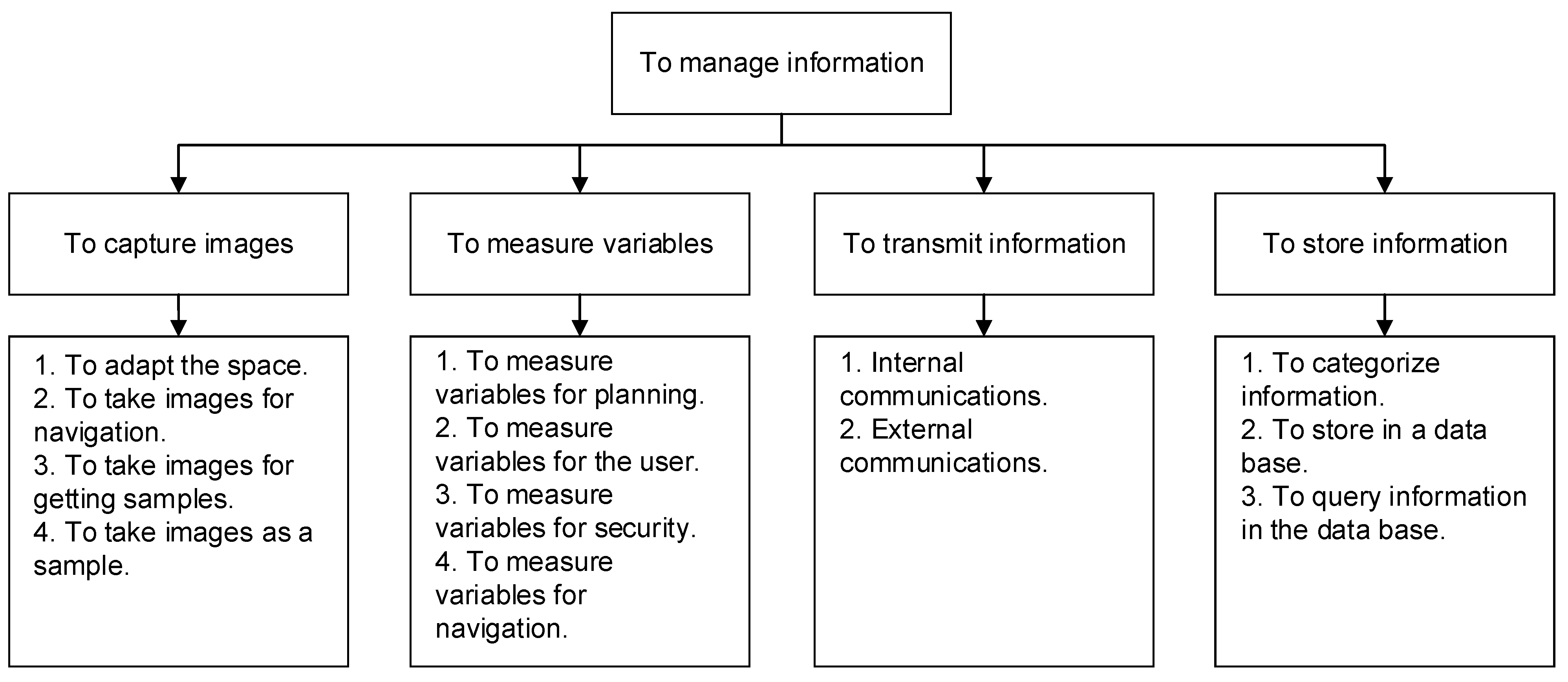
Example: Logical Decomposition for a Lower Level Functional Group
- To capture images. For this case study, images refer to both pictures and video. Images are used in several ways in ROVs. They are the main input for pilots to decide how to navigate, hence, human controllers require quality images. Images are also important to decide where to take a physical sample or which sample should be taken, in case the ROV is equipped to do so.For exploration missions, pictures and videos themselves are the samples, and after being captured, they will be analyzed by specialists. For instance, if studying biodiversity in some ocean area, biologists will analyze images in order to identify and catalog what was recorded.Finally, no image will be recorded if there is not adequate lighting. Beyond a 100-meter depth, sunlight is completely absorbed, so ROV systems need a way to adapt the environment for cameras to work.
- To measure variables. As well as with images, variables are used for several purposes. There are some variables from the vehicle and from external sources required to make decisions regarding whether or not to do an immersion or other mission planning (i.e., current speed, tides, weather, underwater visibility, etc.). Other variables are associated with samples; for instance, water temperature, dissolved oxygen (with the corresponding depth), and coordinates where the values were recorded.Safety variables are information collected in order to monitor the vehicle itself and its surroundings in order to avoid risks or to take action in case of damage or accidents. For example, not only the ROV’s depth is important, but also distance from the bottom, and monitoring if there is humidity inside sealed cases with electronics. The circuit’s current and temperature are also monitored, etc. Pilots need to be checking on these values or checking on alarms in order to take proper actions.Finally, while pilots rely mostly on real-time video to navigate, other variables may be helpful as well. For example, distance from the bottom is important to avoid colliding. ROV coordinates relative to the surface platform are required as feedback when trying to reach a specific location with the underwater vehicle.
- To transmit information. Information is collected both underwater and in the surface station, and such information is required in both sides of the system. There is even information from external sources required for the system to work. For this reason, reliable communication is required inside the vehicle and between the vehicle and the surface station, or even beyond the surface station. Some information needs to be transmitted in real or near real time (for example, navigation video, navigation variables, and safety variables, among others). Depending on the amount of information collected or the system’s capabilities, information can be partially transmitted while some other is stored and analyzed after the mission.
- To store information. Given the volume of data that is generated, a strategic approach to data storage is essential. Information storage, whether onboard the ROV, at the surface station, or distributed across both, must prioritize data integrity, organization, and accessibility. This function addresses the need for comprehensive data management strategies to accommodate the extensive data collected during missions of the robotic system.
6.5. Integrating Functional Decomposition with I4.0 Enhancements
- Must-be Quality Attributes: basic needs that are taken for granted when met but cause dissatisfaction when missing.
- One-dimensional Quality Attributes: features that lead to satisfaction when fulfilled and dissatisfaction when not, with a proportional relationship between the level of fulfillment and customer satisfaction.
- Attractive Quality Attributes: unexpected features that significantly increase customer satisfaction without causing dissatisfaction when absent, serve as differentiators.
- Indifferent Quality Attributes: features that neither enhance nor diminish customer satisfaction.
- Reverse Quality Attributes: features that can cause dissatisfaction when present and satisfaction when absent, varying among different customer segments.
6.6. ROV Development Previous Experience
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| ASV | Autonomous Surface Vehicle |
| AUV | Autonomous Underwater Vehicle |
| EC | Engineering Characteristics |
| FAA | Functional Affinity Analysis |
| FNT | Function of New Technologies |
| FtS | Functions to Solve |
| HoQ | House of Quality |
| INCOSE | International Council on Systems Engineering |
| I4.0 | Industry 4.0 |
| IoT | Internet of things (IoT) |
| ML | Machine Learning |
| NASA | National Aeronautics and Space Administration |
| QFD | Quality Function Deployment |
| ROV | Remotely Operated Vehicle |
| SE | Systems Engineering |
| UCD | User-Centered Design |
| UGV | Unmanned Ground Vehicles |
| UAV | Unmanned Aerial Vehicle |
| UAS | Unmanned Aerial Systems |
References
- Huang, S.; Wang, B.; Li, X.; Zheng, P.; Mourtzis, D.; Wang, L. Industry 5.0 and Society 5.0-Comparison, complementation and co-evolution. J. Manuf. Syst. 2022, 64, 424–428. [Google Scholar] [CrossRef]
- Ghobakhloo, M.; Iranmanesh, M.; Mubarak, M.F.; Mubarik, M.; Rejeb, A.; Nilashi, M. Identifying industry 5.0 contributions to sustainable development: A strategy roadmap for delivering sustainability values. Sustain. Prod. Consum. 2022, 33, 716–737. [Google Scholar] [CrossRef]
- Ziatdinov, R.; Atteraya, M.S.; Nabiyev, R. The Fifth Industrial Revolution as a Transformative Step towards Society 5.0. Societies 2024, 14, 19. [Google Scholar] [CrossRef]
- International Council on Systems Engineering (INCOSE). INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Rúa, S.; Vásquez, R.E.; Crasta, N.; Betancur, M.J.; Pascoal, A. Observability analysis for a cooperative range-based navigation system that uses a rotating single beacon. Ocean. Eng. 2022, 248, 110697. [Google Scholar] [CrossRef]
- Christ, R.D.; Sr, R.L.W. The ROV Manual, a User Guide for Remotely Operated Vehicles; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- Lahoz-Monfort, J.J.; Magrath, M.J.L. A Comprehensive Overview of Technologies for Species and Habitat Monitoring and Conservation. BioScience 2021, 71, 1038–1062. [Google Scholar] [CrossRef] [PubMed]
- Soon, Z.Y.; Kim, T.; Jung, J.H.; Kim, M. Metals and suspended solids in the effluents from in-water hull cleaning by remotely operated vehicle (ROV): Concentrations and release rates into the marine environment. J. Hazard. Mater. 2023, 460, 132456. [Google Scholar] [CrossRef] [PubMed]
- Nilssen, I.; Øyvind, Ø.; Sørensen, A.J.; Johnsen, G.; Moline, M.A.; Berge, J. Integrated environmental mapping and monitoring, a methodological approach to optimise knowledge gathering and sampling strategy. Mar. Pollut. Bull. 2015, 96, 374–383. [Google Scholar] [CrossRef]
- Ludvigsen, M.; Sørensen, A.J. Towards integrated autonomous underwater operations for ocean mapping and monitoring. Annu. Rev. Control 2016, 42, 145–157. [Google Scholar] [CrossRef]
- Teigland, H.; Møller, M.T.; Hassani, V. Underwater Manipulator Control for Single Pilot ROV Control. IFAC-PapersOnLine 2022, 55, 118–123. [Google Scholar] [CrossRef]
- Xia, P.; You, H.; Du, J. Visual-haptic feedback for ROV subsea navigation control. Autom. Constr. 2023, 154, 104987. [Google Scholar] [CrossRef]
- Xia, P.; You, H.; Ye, Y.; Du, J. ROV teleoperation via human body motion mapping: Design and experiment. Comput. Ind. 2023, 150, 103959. [Google Scholar] [CrossRef]
- Zhao, C.; Thies, P.; Lars, J.; Cowles, J. ROV launch and recovery from an unmanned autonomous surface vessel—Hydrodynamic modelling and system integration. Ocean Eng. 2021, 232, 109019. [Google Scholar] [CrossRef]
- Laurent, A. The Industrial Revolution 4.0. In Towards Process Safety 4.0 in the Factory of the Future; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2023; Chapter 1; pp. 1–14. [Google Scholar] [CrossRef]
- Schwab, K.; Davis, N. Shaping the Future of the Fourth Industrial Revolution; Crown Currency: New York, NY, USA, 2018. [Google Scholar]
- Lemstra, M.A.M.S.; de Mesquita, M.A. Industry 4.0: A tertiary literature review. Technol. Forecast. Soc. Chang. 2023, 186, 122204. [Google Scholar] [CrossRef]
- Özköse, H.; Güney, G. The effects of industry 4.0 on productivity: A scientific mapping study. Technol. Soc. 2023, 75, 102368. [Google Scholar] [CrossRef]
- Ben Ruben, R.; Rajendran, C.; Saravana Ram, R.; Kouki, F.; Alshahrani, H.M.; Assiri, M. Analysis of barriers affecting Industry 4.0 implementation: An interpretive analysis using total interpretive structural modeling (TISM) and Fuzzy MICMAC. Heliyon 2023, 9, e22506. [Google Scholar] [CrossRef]
- Benitez, G.B.; Ghezzi, A.; Frank, A.G. When technologies become Industry 4.0 platforms: Defining the role of digital technologies through a boundary-spanning perspective. Int. J. Prod. Econ. 2023, 260, 108858. [Google Scholar] [CrossRef]
- Hernández, M.R.; Moreno, I.D. Process System Engineering Tool Integration in the Context of Industry 4.0. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2021; pp. 469–474. [Google Scholar] [CrossRef]
- Gao, Z.; Wanyama, T.; Singh, I.; Gadhrri, A.; Schmidt, R. From Industry 4.0 to Robotics 4.0—A Conceptual Framework for Collaborative and Intelligent Robotic Systems. Procedia Manuf. 2020, 46, 591–599. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cogn. Robot. 2021, 1, 58–75. [Google Scholar] [CrossRef]
- Marchlewitz, S.; Nicklas, J.P.; Winzer, P. Using systems engineering for improving autonomous robot performance. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 65–70. [Google Scholar] [CrossRef]
- Hernandez, C.; Fernandez-Sanchez, J.L. Model-based systems engineering to design collaborative robotics applications. In Proceedings of the 2017 IEEE International Systems Engineering Symposium (ISSE), Vienna, Austria, 11–13 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Onstein, I.F.; Haskins, C.; Semeniuta, O. Cascading trade-off studies for robotic deburring systems. Syst. Eng. 2022, 25, 475–488. [Google Scholar] [CrossRef]
- Gutierrez, L.B.; Zuluaga, C.A.; Ramirez, J.A.; Vasquez, R.E.; Florez, D.A.; Taborda, E.A.; Valencia, R.A. Development of an Underwater Remotely Operated Vehicle (ROV) for Surveillance and Inspection of Port Facilities. In Proceedings of the Volume 11: New Developments in Simulation Methods and Software for Engineering Applications Safety Engineering, Risk Analysis and Reliability Methods Transportation Systems, Vancouver, BC, Canada, 12–18 November 2010; ASME: New York, NY, USA, 2010. [Google Scholar] [CrossRef]
- Correa, J.C.; Vásquez, R.E.; Ramírez-Macías, J.A.; Taborda, E.A.; Zuluaga, C.A.; Posada, N.L.; Londoño, J.M. An Architecture for the Conceptual Design of Underwater Exploration Vehicles. Ing. Cienc. 2015, 11, 73–97. [Google Scholar] [CrossRef]
- Aguirre-Castro, O.A.; Inzunza-González, E.; García-Guerrero, E.E.; Tlelo-Cuautle, E.; López-Bonilla, O.R.; Olguín-Tiznado, J.E.; Cárdenas-Valdez, J.R. Design and Construction of an ROV for Underwater Exploration. Sensors 2019, 19, 5387. [Google Scholar] [CrossRef]
- Kossiakoff, A.; Sweet, W.; Seymour, S.; Biemer, S. Systems Engineering Principles and Practice; Wiley-Interscience: New York, NY, USA, 2011. [Google Scholar]
- Honour, E.C. INCOSE: History of the International Council on Systems Engineering. Syst. Eng. J. Int. Counc. Syst. Eng. 1998, 1, 4–13. [Google Scholar] [CrossRef]
- Jantzer, M.; Nentwig, G.; Deininger, C.; Michl, T. Systems Engineering. In The Art of Engineering Leadership; Springer: Berlin/Heidelberg, Germany, 2020; pp. 25–35. [Google Scholar] [CrossRef]
- Hirshorn, S.R.; Voss, L.D.; Bromley, L.K. NASA Systems Engineering Handbook; Technical Report; National Aeronautics and Space Administration: Washington, DC, USA, 2017.
- Faulconbridge, R.; Ryan, M. Systems Engineering Practice; Argos Press: Canberra, Australia, 2014. [Google Scholar]
- Haberfellner, R.; de Weck, O.; Fricke, E.; Vössner, S. Systems Engineering; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Peter, R.N. Childs. 1-Design. In Mechanical Design Engineering Handbook (Second Edition); Butterworth-Heinemann: Oxford, UK, 2019; pp. 1–41. [Google Scholar] [CrossRef]
- Smith, E.D.; Bahill, A.T. Attribute substitution in systems engineering. Syst. Engin. 2010, 13, 130–148. [Google Scholar] [CrossRef]
- Kontogiannis, T.; Embrey, D. A user-centred design approach for introducing computer-based process information systems. Appl. Ergon. 1997, 28, 109–119. [Google Scholar] [CrossRef]
- Hegenberg, J.; Cramar, L.; Schmidt, L. Task- and user-centered design of a human-robot system for gas leak detection: From requirements analysis to prototypical realization. IFAC Proc. Vol. 2012, 45, 793–798. [Google Scholar] [CrossRef]
- Musarat, M.A.; Irfan, M.; Alaloul, W.S.; Maqsoom, A.; Ghufran, M. A Review on the Way Forward in Construction through Industrial Revolution 5.0. Sustainability 2023, 15, 13862. [Google Scholar] [CrossRef]
- Mohajan, H. The First Industrial Revolution: Creation of a New Global Human Era. J. Soc. Sci. Humanit. 2019, 5, 377–387. [Google Scholar]
- Mohajan, H. The Second Industrial Revolution has Brought Modern Social and Economic Developments. J. Soc. Sci. Humanit. 2020, 6, 1–14. [Google Scholar]
- Clark, W.W.; Grant Cooke, M. The Third Industrial Revolution. In Sustainable Communities Design Handbook; Butterworth-Heinemann: Oxford, UK, 2010; Chapter 2; pp. 9–22. [Google Scholar] [CrossRef]
- Standardization Council Industry 4.0. German Standardization Roadmap on Industry 4.0; Technical Report; DKE Deutsche Kommission Elektrotechnik Elektronik Informationstechnik in DIN und VDE: Berlin, Germany, 2023. [Google Scholar]
- Kamble, S.S.; Gunasekaran, A.; Gawankar, S.A. Sustainable Industry 4.0 framework: A systematic literature review identifying the current trends and future perspectives. Process Saf. Environ. Prot. 2018, 117, 408–425. [Google Scholar] [CrossRef]
- Radanliev, P.; De Roure, D.; Nicolescu, R.; Huth, M.; Santos, O. Artificial Intelligence and the Internet of Things in Industry 4.0. CCF Trans. Pervasive Comput. Interact. 2021, 3, 329–338. [Google Scholar] [CrossRef]
- Ashima, R.; Haleem, A.; Bahl, S.; Javaid, M.; Kumar Mahla, S.; Singh, S. Automation and manufacturing of smart materials in additive manufacturing technologies using Internet of Things towards the adoption of industry 4.0. Mater. Today Proc. 2021, 45, 5081–5088. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Internet of things for smart factories in Industry 4.0, a review. Internet Things-Cyber-Phys. Syst. 2023, 3, 192–204. [Google Scholar] [CrossRef]
- Rahman, M.S.; Ghosh, T.; Aurna, N.F.; Kaiser, M.S.; Anannya, M.; Hosen, A.S. Machine learning and internet of things in industry 4.0: A review. Meas. Sensors 2023, 28, 100822. [Google Scholar] [CrossRef]
- Alenizi, F.A.; Abbasi, S.; Hussein Mohammed, A.; Masoud Rahmani, A. The artificial intelligence technologies in Industry 4.0: A taxonomy, approaches, and future directions. Comput. Ind. Eng. 2023, 185, 109662. [Google Scholar] [CrossRef]
- Tashtoush, T.; Vazquez, J.A.; Herrera, J.; Hernandez, L.; Martinez, L.; Gutierrez, M.E.; Escamilla, O.; Martinez, R.E.; Diaz, A.; Jimenez, J.; et al. Space Mining Robot Prototype for NASA Robotic Mining Competition Utilizing Systems Engineering Principles. Int. J. Adv. Comput. Sci. Appl. 2021, 12. [Google Scholar] [CrossRef]
- Ghosh, A.; Soto, D.A.P.; Veres, S.M.; Rossiter, A. Human Robot Interaction for Future Remote Manipulations in Industry 4.0. IFAC-PapersOnLine 2020, 53, 10223–10228. [Google Scholar] [CrossRef]
- Alshammari, R.F.N.; Arshad, H.; Rahman, A.H.A.; Albahri, O.S. Robotics Utilization in Automatic Vision-Based Assessment Systems From Artificial Intelligence Perspective: A Systematic Review. IEEE Access 2022, 10, 77537–77570. [Google Scholar] [CrossRef]
- Wang, L.; Ye, X.; Wang, S.; Li, P. ULO: An Underwater Light-Weight Object Detector for Edge Computing. Machines 2022, 10, 629. [Google Scholar] [CrossRef]
- Witkowski, K. Internet of Things, Big Data, Industry 4.0—Innovative Solutions in Logistics and Supply Chains Management. Procedia Eng. 2017, 182, 763–769. [Google Scholar] [CrossRef]
- Singh, H. Big data, industry 4.0 and cyber-physical systems integration: A smart industry context. Mater. Today Proc. 2021, 46, 157–162. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Suman, R. Digital Twin applications toward Industry 4.0: A Review. Cogn. Robot. 2023, 3, 71–92. [Google Scholar] [CrossRef]
- Mazumder, A.; Sahed, M.; Tasneem, Z.; Das, P.; Badal, F.; Ali, M.; Ahamed, M.; Abhi, S.; Sarker, S.; Das, S.; et al. Towards next generation digital twin in robotics: Trends, scopes, challenges, and future. Heliyon 2023, 9, e13359. [Google Scholar] [CrossRef]
- Vlădăreanu, L.; Gal, A.I.; Melinte, O.D.; Vlădăreanu, V.; Iliescu, M.; Bruja, A.; Feng, Y.; Ciocîrlan, A. Robot Digital Twin towards Industry 4.0. IFAC-PapersOnLine 2020, 53, 10867–10872. [Google Scholar] [CrossRef]
- Bhandari, B.; Manandhar, P. Integrating Computer Vision and CAD for Precise Dimension Extraction and 3D Solid Model Regeneration for Enhanced Quality Assurance. Machines 2023, 11, 1083. [Google Scholar] [CrossRef]
- Zheng, T.; Ardolino, M.; Bacchetti, A.; Perona, M. The applications of Industry 4.0 technologies in manufacturing context: A systematic literature review. Int. J. Prod. Res. 2020, 59, 1922–1954. [Google Scholar] [CrossRef]
- Tamir, T.S.; Xiong, G.; Shen, Z.; Leng, J.; Fang, Q.; Yang, Y.; Jiang, J.; Lodhi, E.; Wang, F.Y. 3D printing in materials manufacturing industry: A realm of Industry 4.0. Heliyon 2023, 9, e19689. [Google Scholar] [CrossRef]
- Kingsley, M.S. Cloud Computing Concepts. In Cloud Technologies and Services; Springer International Publishing: Berlin/Heidelberg, Germany, 2023; Chapter 1; pp. 3–30. [Google Scholar] [CrossRef]
- Zhao, X.; Jiang, R.; Han, Y.; Li, A.; Peng, Z. A survey on cybersecurity knowledge graph construction. Secur. Comput. 2024, 136, 103524. [Google Scholar] [CrossRef]
- Guo, J.; Bilal, M.; Qiu, Y.; Qian, C.; Xu, X.; Raymond Choo, K.K. Survey on digital twins for Internet of Vehicles: Fundamentals, challenges, and opportunities. Digit. Commun. Netw. 2022, 10, 237–247. [Google Scholar] [CrossRef]
- Nie, Z.; Cao, G.; Zhang, P.; Peng, Q.; Zhang, Z. Multi-Analogy Innovation Design Based on Digital Twin. Machines 2022, 10, 652. [Google Scholar] [CrossRef]
- Li, X. Inventory management and information sharing based on blockchain technology. Comput. Ind. Eng. 2023, 179, 109196. [Google Scholar] [CrossRef]
- Elapolu, M.S.; Rai, R.; Gorsich, D.J.; Rizzo, D.; Rapp, S.; Castanier, M.P. Blockchain technology for requirement traceability in systems engineering. Inf. Syst. 2024, 123, 102384. [Google Scholar] [CrossRef]
- Godavarthi, B.; Narisetty, N.; Gudikandhula, K.; Muthukumaran, R.; Kapila, D.; Ramesh, J. Cloud computing enabled business model innovation. J. High Technol. Manag. Res. 2023, 34, 100469. [Google Scholar] [CrossRef]
- Rad, F.F.; Oghazi, P.; Palmié, M.; Chirumalla, K.; Pashkevich, N.; Patel, P.C.; Sattari, S. Industry 4.0 and supply chain performance: A systematic literature review of the benefits, challenges, and critical success factors of 11 core technologies. Ind. Mark. Manag. 2022, 105, 268–293. [Google Scholar] [CrossRef]
- Tsolakis, N.; Gasteratos, A. Sensor-Driven Human-Robot Synergy: A Systems Engineering Approach. Sensors 2022, 23, 21. [Google Scholar] [CrossRef]
- Slavic, D.; Marjanovic, U.; Medic, N.; Simeunovic, N.; Rakic, S. The Evaluation of Industry 5.0 Concepts: Social Network Analysis Approach. Appl. Sci. 2024, 14, 1291. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Pearson Educacion: London, UK, 2006. [Google Scholar]
- Siciliano, B.; Khatib, O.; Kröger, T. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 200. [Google Scholar]
- Inaba, M.; Corke, P. Robotics Research: The 16th International Symposium ISRR; Springer: Berlin/Heidelberg, Germany, 2016; Volume 114. [Google Scholar]
- Ding, X.; Wang, Y.; Wang, Y.; Xu, K. A review of structures, verification, and calibration technologies of space robotic systems for on-orbit servicing. Sci. China Technol. Sci. 2020, 64, 462–480. [Google Scholar] [CrossRef]
- Dudek, G.; Jenkin, M. Computational Principles of Mobile Robotics; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Niku, S.B. Introduction to Robotics: Analysis, Control, Applications; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Post, M.A.; Yan, X.T.; Letier, P. Modularity for the future in space robotics: A review. Acta Astronaut. 2021, 189, 530–547. [Google Scholar] [CrossRef]
- Davis, P.; Brockhurst, J. Subsea pipeline infrastructure monitoring: A framework for technology review and selection. Ocean Eng. 2015, 104, 540–548. [Google Scholar] [CrossRef]
- Vedachalam, N.; Ramesh, S.; Subramanian, A.; Sathianarayanan, D.; Ramesh, R.; Harikrishnan, G.; Pranesh, S.B.; Doss Prakash, V.; Bala Naga Jyothi, V.; Chowdhury, T.; et al. Design and development of Remotely Operated Vehicle for shallow waters and polar research. In Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, India, 23–25 February 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Toal, D.; Omerdic, E.; Dooly, G. Precision navigation sensors facilitate full auto pilot control of Smart ROV for ocean energy applications. In Proceedings of the SENSORS, Limerick, Ireland, 28–31 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1897–1900. [Google Scholar] [CrossRef]
- NORSOK. NORSOK Standard U-102; Norwegian Technology Centre Std.: Trondheim, Norway, 2012. [Google Scholar]
- Dukan, F. ROV Motion Control Systems. Ph.D. Thesis, Norweigian University of Science and Technology NTNU, Trondheim, Norway, 2014. [Google Scholar]
- Dukan, F.; Ludvigsen, M.; Sørensen, A.J. Dynamic positioning system for a small size ROV with experimental results. In Proceedings of the OCEANS, Santander, Spain, 6–9 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–10. [Google Scholar] [CrossRef]
- Chen, H.H. Vision-based tracking with projective mapping for parameter identification of remotely operated vehicles. Ocean Eng. 2008, 35, 983–994. [Google Scholar] [CrossRef]
- Zhao, B.; Blanke, M.; Skjetne, R. Particle filter ROV navigation using hydroacoustic position and speed log measurements. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 6209–6215. [Google Scholar] [CrossRef]
- Bonin-Font, F.; Oliver, G.; Wirth, S.; Massot, M.; Lluis Negre, P.; Beltran, J.P. Visual sensing for autonomous underwater exploration and intervention tasks. Ocean Eng. 2015, 93, 25–44. [Google Scholar] [CrossRef]
- Le, K.D.; Nguyen, H.D.; Ranmuthugala, D.; Forrest, A. A heading observer for ROVs under roll and pitch oscillations and acceleration disturbances using low-cost sensors. Ocean Eng. 2015, 110, 152–162. [Google Scholar] [CrossRef]
- Dukan, F.; Sørensen, A.J. Integration Filter for APS, DVL, IMU and Pressure Gauge for Underwater Vehicles. IFAC Proc. Vol. 2013, 46, 280–285. [Google Scholar] [CrossRef]
- Choyekh, M.; Kato, N.; Yamaguchi, Y.; Dewantara, R.; Chiba, H.; Senga, H.; Yoshie, M.; Tanaka, T.; Kobayashi, E.; Short, T. Development and Operation of Underwater Robot for Autonomous Tracking and Monitoring of Subsea Plumes After Oil Spill and Gas Leak from Seabed and Analyses of Measured Data. In Applications to Marine Disaster Prevention: Spilled Oil and Gas Tracking Buoy System; Springer: Tokyo, Japan, 2017; pp. 17–93. [Google Scholar] [CrossRef]
- Department of Defense. System Engineering Fundamentals; Defense Acquisition University Press: Fort Belvoir, VA, USA, 2001; Chapter 3. [Google Scholar]
- Ullman, D. The Mechanical Design Process; McGraw-Hill: London, UK, 2009. [Google Scholar]
- Mavin, A.; Wilkinson, P.; Harwood, A.; Novak, M. Easy Approach to Requirements Syntax (EARS). In Proceedings of the 2009 17th IEEE International Requirements Engineering Conference, Atlanta, GA, USA, 31 August–4 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 317–322. [Google Scholar] [CrossRef]
- Ulrich, K.; Eppinger, S. Product Design and Development; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Aristizábal, L.M.; Zuluaga, C.A.; Rúa, S.; Vásquez, R.E. Modular Hardware Architecture for the Development of Underwater Vehicles Based on Systems Engineering. J. Mar. Sci. Eng. 2021, 9, 516. [Google Scholar] [CrossRef]
- Zuluaga, C.A.; Aristizábal, L.M.; Rúa, S.; Franco, D.A.; Osorio, D.A.; Vásquez, R.E. Development of a Modular Software Architecture for Underwater Vehicles Using Systems Engineering. J. Mar. Sci. Eng. 2022, 10, 464. [Google Scholar] [CrossRef]
- Parisher, R.A.; Rhea, R.A. Pipe Drafting and Design; Gulf Professional Publishing: Houston, TX, USA, 2022. [Google Scholar] [CrossRef]
- Dieter, G.E.; Schmidt, L.C. Engineering design Fourth Edition; McGraw-Hill: New York, NY, USA, 2012. [Google Scholar]
- Kano, N. Attractive quality and must-be quality. J. Jpn. Soc. Qual. Control 1984, 31, 147–156. [Google Scholar]
- Law, C.M.; Jaeger, P.T.; McKay, E. User-centered design in universal design resources? Univers. Access Inf. Soc. 2010, 9, 327–335. [Google Scholar] [CrossRef]
- Fukuyama, M. Society 5.0: Aiming for a new human-centered society. Jpn. Spotlight 2018, 27, 47–50. [Google Scholar]
- Xu, X.; Lu, Y.; Vogel-Heuser, B.; Wang, L. Industry 4.0 and Industry 5.0—Inception, conception and perception. J. Manuf. Syst. 2021, 61, 530–535. [Google Scholar] [CrossRef]
- International Council on Systems Engineering (INCOSE). Systems Engineering Vision 2035. 2022. Available online: https://www.incose.org/publications/se-vision-2035 (accessed on 13 April 2024).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| I4.0 Technology | Optimized Summary of Functions |
|---|---|
| Internet of Things | Collect real-time data, analyze and process, allow the user to remotely monitor and control the IoT device the collected data, and enable automated actions based on predefined conditions [46,47,48]. |
| Artificial Intelligence/Machine Learning | Analyze large datasets to identify patterns, trends, objects, and correlations; use historical data to predict future outcomes; and enable machines to interpret and understand visual and audible information [46,49,50]. |
| Robotics | Navigate through environments without human intervention, identify and manipulate objects, facilitate communication and collaboration between robots and humans, and incorporate ML and AI to adapt to changing environments and optimize performance [51,52,53,54]. |
| Big Data Analysis | Employs advanced algorithms to process and analyze extensive data sets, deriving insights for strategic decision-making and operational optimization. Enables real-time data analysis for proactive management [55,56]. |
| Augmented/Virtual Reality | Enhances real-world and virtual environments for immersive interactions, training, and visualization. Augmented Reality overlays digital content onto the physical world, while Virtual Reality creates fully immersive digital environments [57,58,59,60]. |
| 3D Printing | Rapidly prototypes physical models, enable the production of customized and personalized products tailored to individual needs, and facilitate the production of small batches of products economically [47,61,62]. |
| Cloud Computing | Provide virtualized computing infrastructure over the internet, including virtual machines, storage, and networking. Provide scalable and on-demand storage resources over the internet. Provide tools and services for processing, analyzing, and visualizing large sets of data [63]. |
| Cybersecurity | Ensures the protection of digital assets, securing data and systems from cyber threats. Essential for maintaining data privacy, integrity, and secure online transactions in an interconnected ecosystem [64]. |
| Digital Twin Technology | Creates virtual models of physical systems for simulation and analysis. Facilitates optimization and predictive maintenance, enabling better decision-making through virtual testing and monitoring [65,66]. |
| Blockchain | Offers a secure and transparent method for recording transactions and tracking assets through decentralized ledgers. Enhances trust, security, and efficiency in digital exchanges and supply chain management [67,68]. |
| Req. ID | Requirement | Short Name | Priority Score |
|---|---|---|---|
| 1 | The ROV shall collect underwater liquid and solid samples | To collect physical samples | 3 |
| 2 | The ROV shall record underwater images | To acquire images | 5 |
| 3 | The images shall be clear and readable | Image quality | 4 |
| 4 | The ROV shall preserve data of variables of interest in time | To store data of variables of interest | 4 |
| 5 | The ROV shall be capable of communicate instant variables to the surface station | To transmit information from ROV to surface | 5 |
| 6 | The surface station shall have different communication options | Surface station with connectivity flexibility | 1 |
| 7 | The ROV shall preserve recorded images information | To store image information | 4 |
| 8 | The ROV shall reach the desired position and orientation in the area of interest | ROV positioning | 5 |
| 9 | The ROV shall withstand the environmental conditions while guaranteeing continuous operability | Protection | 3 |
| 10 | The ROV shall be able to navigate underwater from the deployment site to the mission site through underwater obstacles | Maneuverability | 5 |
| 11 | The ROV shall have a command center from where the mission is controlled | Surface station | 5 |
| 12 | The ROV shall have flexibility to connect additional equipment for possible mission variations | Possibility of connecting own equipment | 2 |
| USER REQUIREMENTS | ENGINEERING CHARACTERISTICS (EC) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Requirements | Priority Score | Normalized Priority Score | Data Transmission Speed | Video Resolution | Image Resolution | Storage Autonomy | Additional Ports in Surface Station | Sensors’ Specification | Number of Cameras | Quantity of Measured Variables | Video Output Frequency | Information Storage Specifications | Additional Ports for Communic | Camera’s Degrees of Freedom | Additional ports Available Vehicle |
| To acquire images | 5 | 0.11 | 9 | 9 | 9 | 9 | 9 | 1 | 1 | 1 | |||||
| To transmit information ROV to surface | 5 | 0.11 | 9 | 3 | 1 | 1 | 3 | ||||||||
| ROV positioning | 5 | 0.11 | 3 | ||||||||||||
| Maneuverability | 5 | 0.11 | 9 | 1 | 1 | 1 | 1 | ||||||||
| Surface station | 5 | 0.11 | 9 | 3 | 3 | 3 | 9 | 3 | 3 | 3 | 3 | 9 | |||
| Image quality | 4 | 0.09 | 3 | 9 | 9 | 3 | 3 | ||||||||
| To store data of variables of interest | 4 | 0.09 | 3 | 3 | 9 | 9 | 9 | 1 | |||||||
| To store image information | 4 | 0.09 | 9 | 9 | 9 | 3 | 9 | 9 | |||||||
| To collect physical samples | 3 | 0.07 | 3 | 9 | 3 | 3 | |||||||||
| Protection | 3 | 0.07 | 3 | 3 | 1 | 3 | 1 | ||||||||
| Possibility of connecting own equipment | 2 | 0.04 | 9 | 9 | 3 | 3 | 3 | 1 | 9 | ||||||
| Surface station with connectivity flexibility | 1 | 0.02 | 9 | 9 | |||||||||||
| EC Score | 4.9 | 3.9 | 3.0 | 2.3 | 1.7 | 1.7 | 1.6 | 1.5 | 1.5 | 1.2 | 1.1 | 0.4 | 0.1 | ||
| Subfunction | Standard Solution | Ideas from I4.0 to Replace or Improve Standard Solution | Impacted Requirement (Req. ID) |
|---|---|---|---|
| To adapt the space | Underwater lights (led, laser, etc) | Smart lights, IoT, AI | 1, 2, 3, 8, 10 |
| To take images for navigation | Waterproof cameras | AI for obstacle alarms to pilot. VR tools for better feedback to pilots | 8, 10 |
| To take images for getting samples | Waterproof cameras | AI for image recognition of potential physical samples | 1 |
| To take images as samples | Waterproof cameras | AI for image recognition and classification (depending on the mission) | 2, 3 |
| To measure variables for planning | Weather radars (rain, winds, surges, ocean currents), probes and sensors | Integration of various sensors with data analysis capabilities. IoT and Big Data | 6, 8, 9 |
| To measure variables for the user | Sensors (depth, axial speeds, ROV position) | User-friendly interfaces for real-time data monitoring | 4, 5 |
| To measure variables for safety | Sensors for circuit current/overcurrent (breaker, fuse), temperature sensor, humidity sensor in sealed compartments | IoT sensing and controlling internal safety conditions | 5, 9 |
| To measure variables for navigation | Sonar system (distance to seabed, depth, coordinates, position with respect to the reference) | AI-based navigation systems for optimized route planning. VR tools for better feedback to pilots. | 1, 2, 8, 10 |
| External communications | Tether cable to surface station | Satellite communications for global data transmission from surface station. IoT. | 5, 6 |
| To categorize information | Manually classifying information, programmed classifying scripts | Automated data categorization and indexing systems. AI and ML | 4, 7 |
| To store in a database | Database on internal hard-drive on ROV | Cloud storage with access from different locations | 4, 7 |
| To query information in a database | Database query software | Advanced query processing algorithms for quick retrieval. Big Data tools | 4, 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Restrepo-Carmona, J.A.; Taborda, E.A.; Paniagua-García, E.; Escobar, C.A.; Sierra-Pérez, J.; Vásquez, R.E. On the Integration of Complex Systems Engineering and Industry 4.0 Technologies for the Conceptual Design of Robotic Systems. Machines 2024, 12, 625. https://doi.org/10.3390/machines12090625
Restrepo-Carmona JA, Taborda EA, Paniagua-García E, Escobar CA, Sierra-Pérez J, Vásquez RE. On the Integration of Complex Systems Engineering and Industry 4.0 Technologies for the Conceptual Design of Robotic Systems. Machines. 2024; 12(9):625. https://doi.org/10.3390/machines12090625
Chicago/Turabian StyleRestrepo-Carmona, Jaime Alonso, Elkin A. Taborda, Esteban Paniagua-García, Carlos A. Escobar, Julián Sierra-Pérez, and Rafael E. Vásquez. 2024. "On the Integration of Complex Systems Engineering and Industry 4.0 Technologies for the Conceptual Design of Robotic Systems" Machines 12, no. 9: 625. https://doi.org/10.3390/machines12090625
APA StyleRestrepo-Carmona, J. A., Taborda, E. A., Paniagua-García, E., Escobar, C. A., Sierra-Pérez, J., & Vásquez, R. E. (2024). On the Integration of Complex Systems Engineering and Industry 4.0 Technologies for the Conceptual Design of Robotic Systems. Machines, 12(9), 625. https://doi.org/10.3390/machines12090625