

A Review on the Applications of Dual Quaternions

Abstract
1. Introduction
2. Dual Numbers
2.1. Transference Principle
2.2. Definition of Dual Numbers
- Equality: iff and .
- Addition: .
- Multiplication: .
- Division: the division is possible and unambiguous if and takes the form
2.3. Functions of Dual Numbers
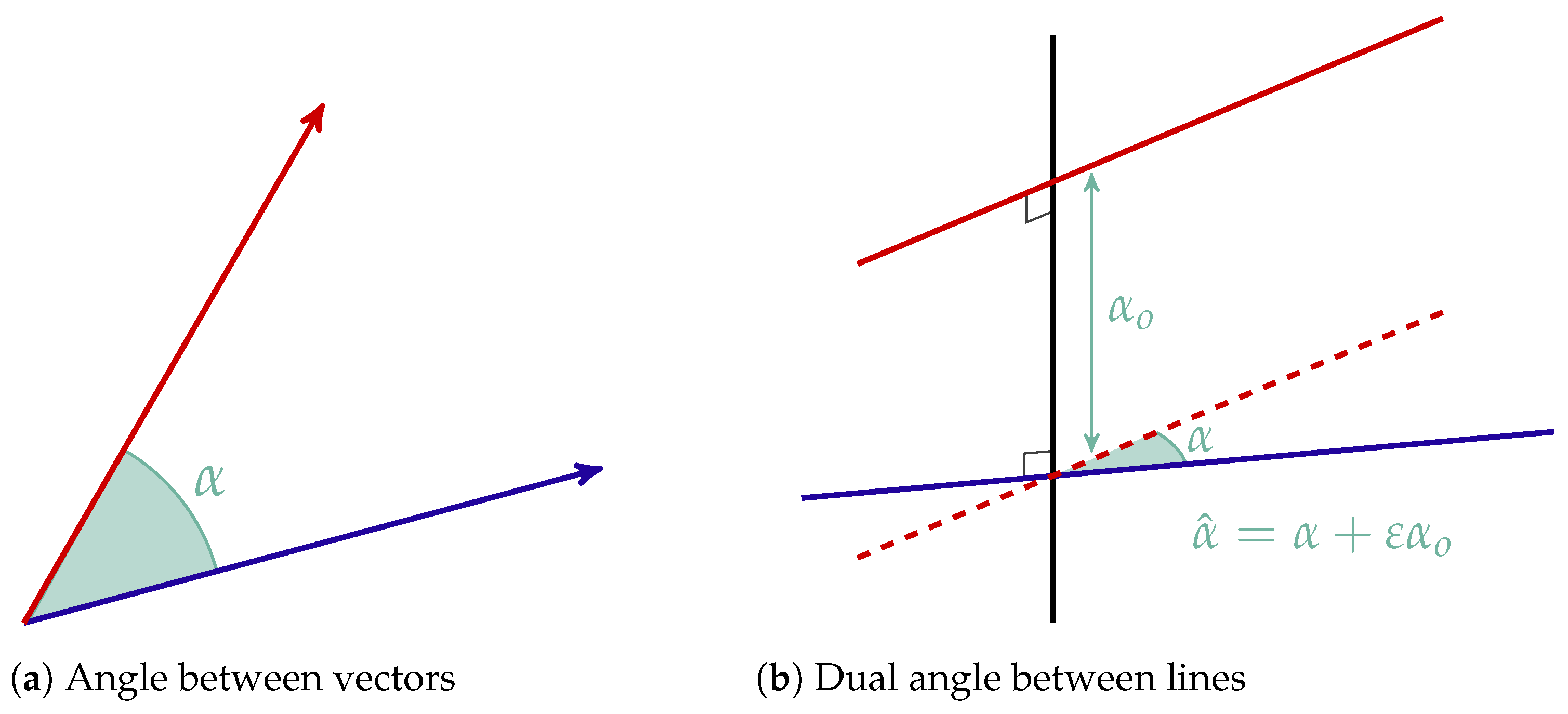
2.4. Trigonometry
3. Dual Vectors
3.1. Chasles’ Theorem
“Any given displacement of a rigid body can be effected by a rotation about an axis combined with a translation parallel to that axis.”
3.2. Definition of Dual Vectors
3.3. Norm of a Dual Vector
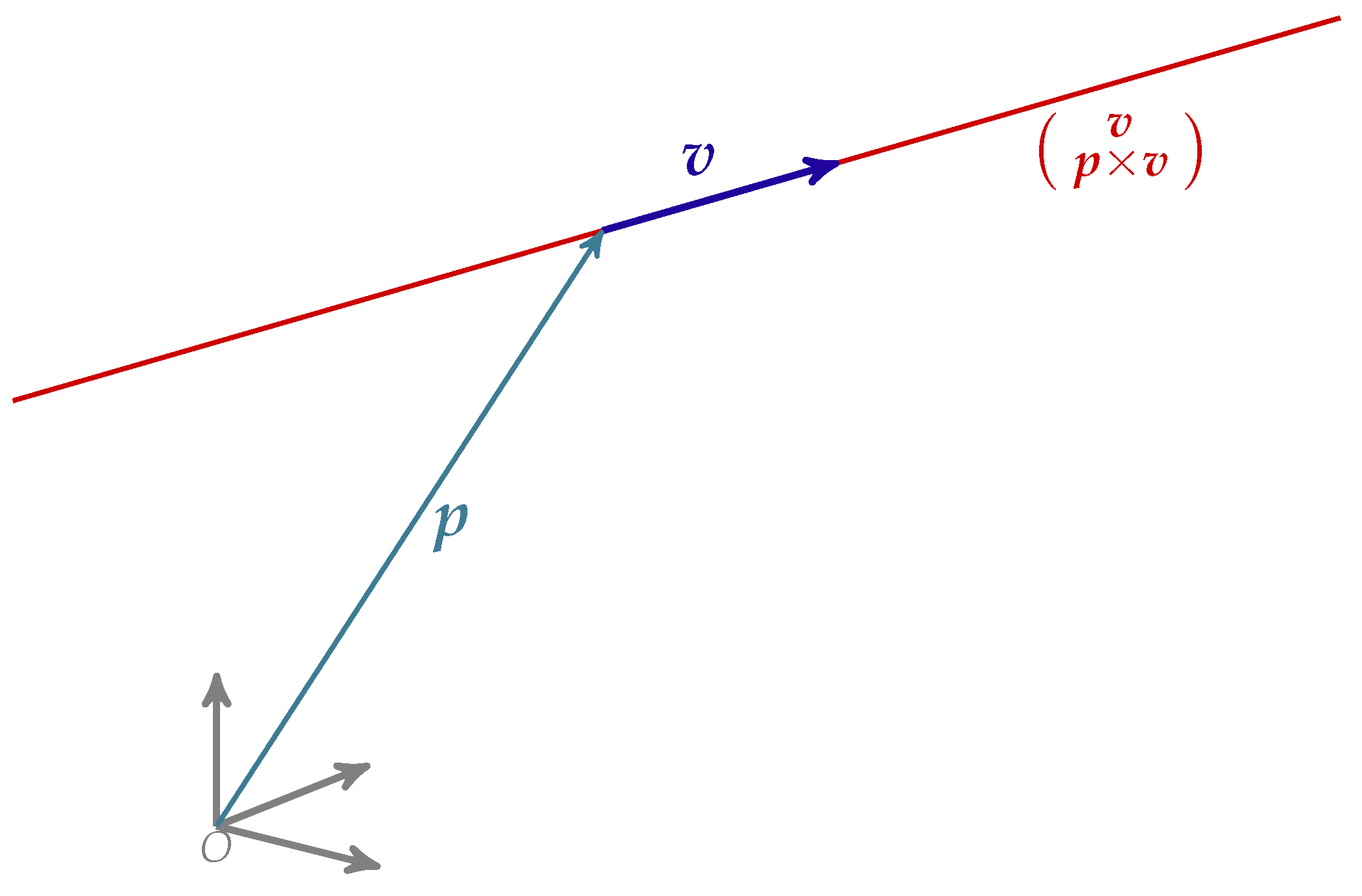
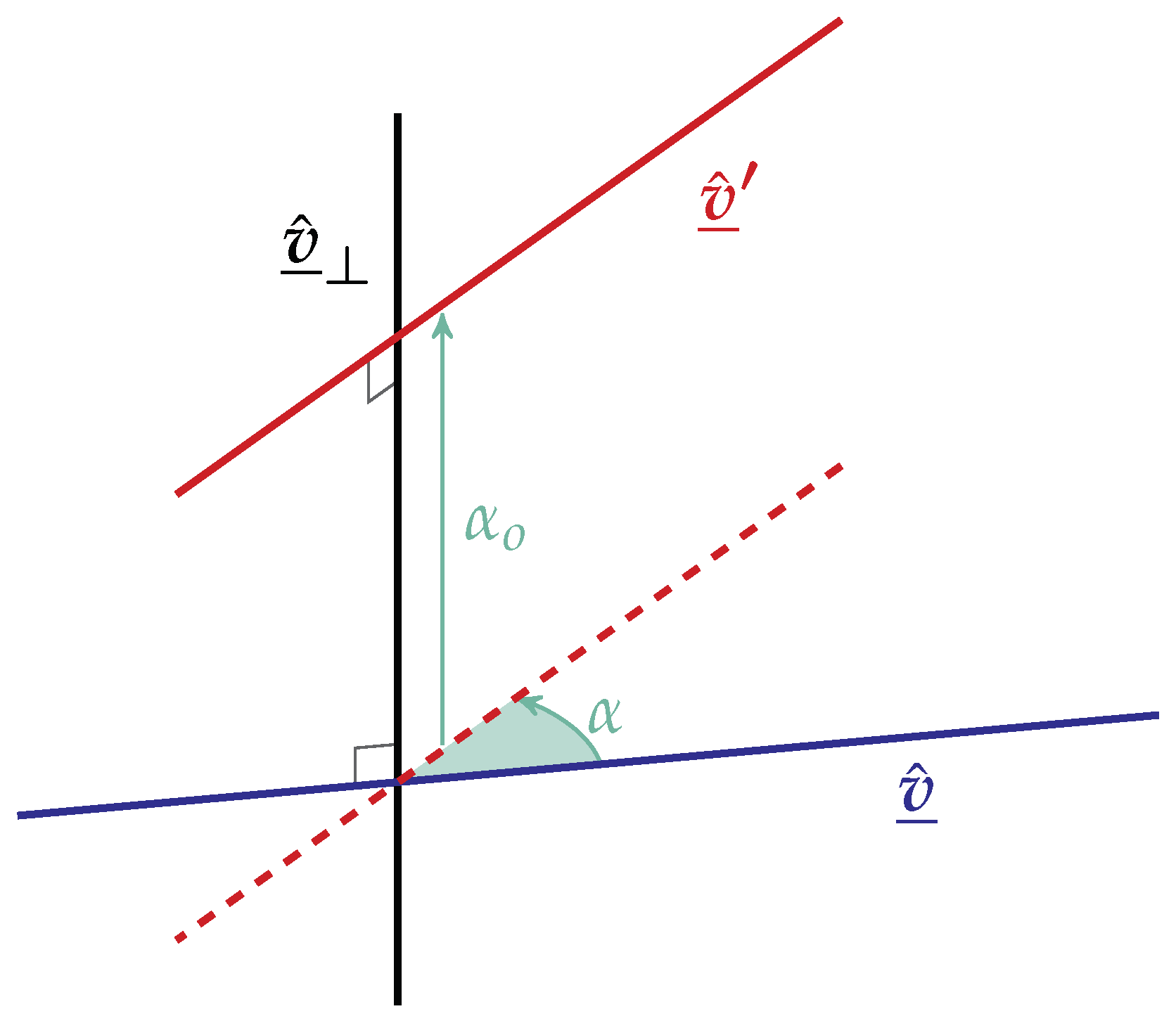
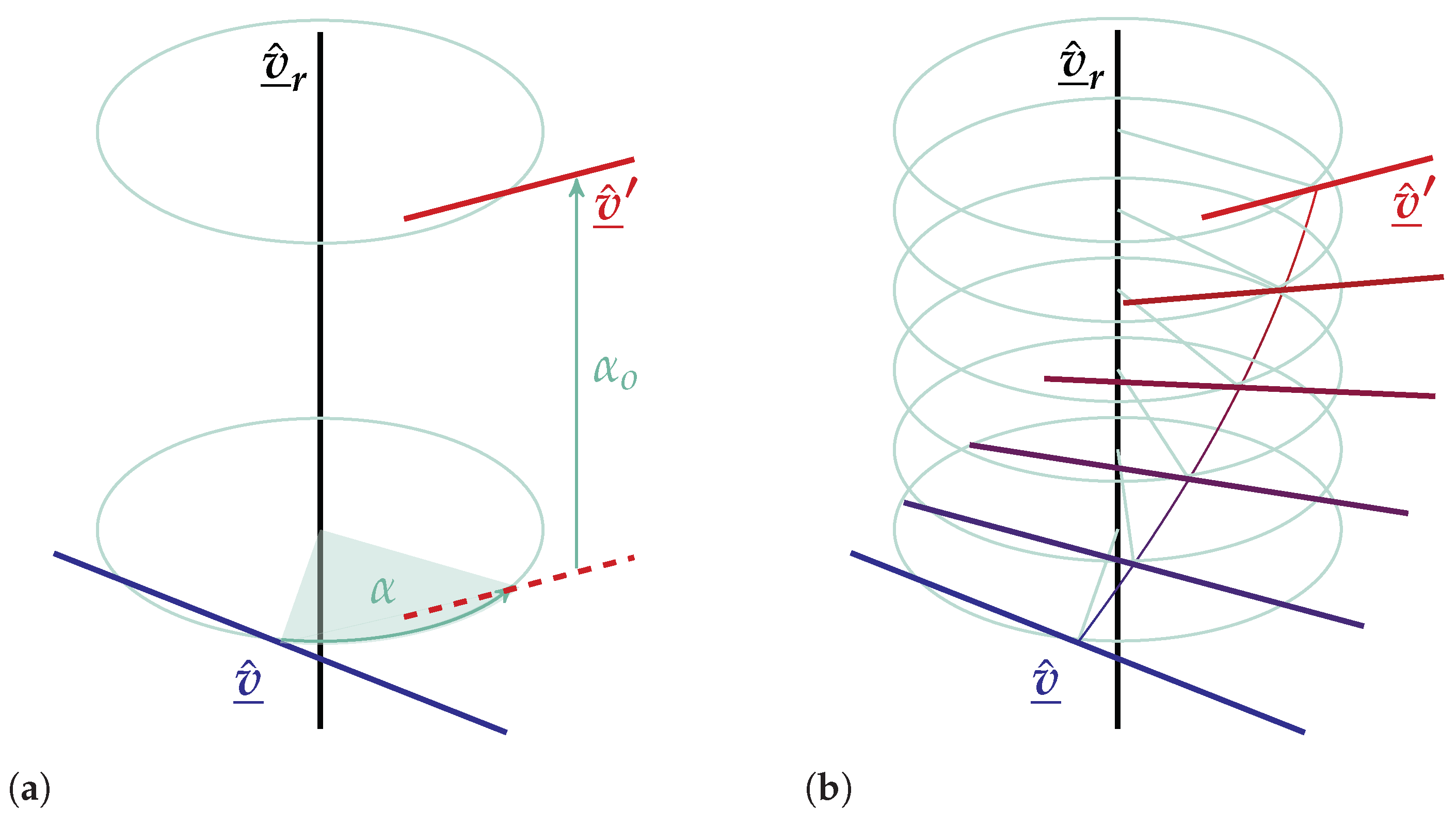
3.4. Representation of Lines by Dual Vectors
3.5. Representation of Screws and Twists by Dual Vectors
4. Dual Quaternions
4.1. Definition of a Dual Quaternion
4.2. Norm of a Dual Quaternion
4.3. Dual Quaternion Operations
4.3.1. Left Operator
4.3.2. General Twist Operator
4.3.3. The “qt” Twist Operator
5. Dual Quaternions Applications
5.1. General Overview
5.2. Free Rigid Bodies
5.2.1. Kinematics
5.2.2. Differential Kinematics of Rigid Bodies
5.2.3. Dynamics Using the Dual Inertia Operator
5.2.4. Modeling of a Rigid Body
5.3. Serial Mechanisms
5.3.1. Direct Kinematics Using Successive Screw Displacements Method
5.3.2. Differential Kinematics
5.3.3. Differential Kinematics Using Hyper-Dual Quaternions
5.4. Parallel Mechanisms
Kinematics of Parallel Mechanisms
5.5. Control
5.5.1. Kinematic Control
5.5.2. Feedback Linearization
5.5.3. Other Control Strategies Using Dual Quaternions
5.6. Rigid-Body Motion Interpolation
5.7. Others Applications
5.7.1. Kinematic Synthesis
5.7.2. Processing Visual Data
5.7.3. Estimation and Navigation
6. Discussions
- Dual Quaternions as a framework for Robotics:
- Coupling and Decoupling:
- The Transference Principle:
- Hyper-Dual Quaternions:
- Screw Theory:
Advantages and Disadvantages
- “It can be argued that lines are more fundamental than points, since lines can be used to represent rotations as well as forces and, in addition, linear combination of lines, screws, can represent twists and wrenches. Thus it is meaningful to pursue a unified approach to robot kinematics based on line transformations.” [2].
- Dual quaternions are considered the best line transformation due to their simplicity, conciseness and elegance. They are also perhaps the most easily visualized representation, as the screw axis and the dual angular displacement enter directly into their specification [1].
- Some advantages of quaternions when dealing with rotations are kept for dual quaternions dealing with rotations and translations; for example, they do not have the gimbal lock problem, while posessing normalization versus orthogonalization and easy interpolation.
- They treat rotation and translation in a way that respects the natural coupling between the two. Although it is not always clear when this should be advantageous, the following cases are good examples:
- –
- Synergy: When the application needs an interconnected behavior that would come with the synergy of translation and rotation. For example, an application in which the translation should be mainly along a direction given by the orientation. This is the case with most transport systems, be it cars, trains, airplanes, etc. Also, where you want to give a natural feel for the motion when an otherwise decoupled motion might look artificial. This would be the case in computer graphics.
- –
- Applications needing to estimate position and orientation: In this case, the equations are normally interconnected in a way that, by treating them in a coupled manner, the problem is solved in one pass. But if decoupled, one would need first to compute orientation/rotation and then compute position/translation. Thus, any error in the calculation of the orientation/rotation would be carried through to the position/translation, leading to a less accurate result overall.
- The Transference Principle allows many problems and formulations using quaternions and dealing with rotations to be effortlessly converted to dealing with rotations and translations by using dual quaternions. As an example, quaternion-based controllers may be extended (dualized) and their Lyapunov functions may also be extended to prove stability [47]; the same process applies to Kalman Filters [101]. The dualization of the quaternionic interpolation slerp to the dual quaternionic sclerp is another example.
- By using dual quaternion formulation, some problems can be expressed in a quadratic formulation that algorithms can exploit to arrive at faster solutions. This is the case for the direct kinematics of a class of parallel mechanisms [27] and the estimation of the position and orientation of objects through visual data [56].
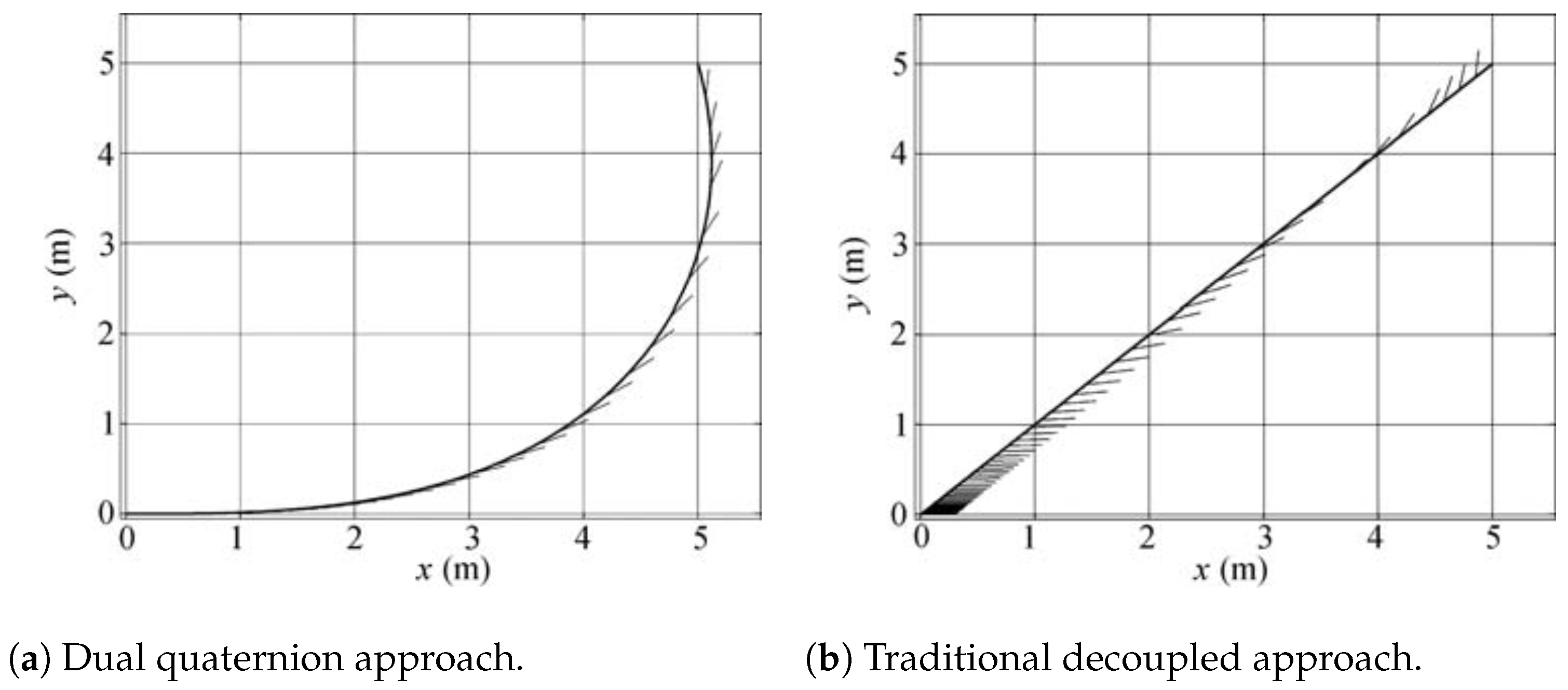
- The interpolation of motion using dual quaternions, sclerp, have the desired properties of constant speed, shortest path and coordinate invariance. This can not be obtained interpolating orientation and position separately, even using quaternions for the orientation [61]. Also, the application of sclerp in a De Castilejau’s algorithm provides a interpolation of motion, which is also coordinate-invariant [44,63].
7. Conclusions
8. Future Directions of Research
- Further advancements in dual quaternions applications should be expected in classical applications already using the tool, like: kinematics of mechanisms and machines. These have been studied for, at least, half a century, and the interest has never faded (quite the opposite);
- Robotics, machines and machanisms is an area that benefits from dual quaternions. With the use of Screw Theory to model joints and their actions, control techniques and path planning (through Motion Interpolation), this area can now be explored in the sole framework of dual quaternions. Research in the area of robotics using dual quaternions includes modern applications like whole-body robots, cooperative robots and robots in formation.
- Another area pushing for having an entire framework around dual quaternions is spacecraft-related applications. In addition to modeling, control and path planning, we have the studies of rendevous and docking, image-based relative-orientation using dual quaternions and descent control.
- Dual quaternions (DQs) offer advantages over the traditional Homogeneous Matrices (HMs). They do not suffer from gimbal lock. When the values drift, even from normal computation or measurement, HMs have to go through a more computational demanding process of orthogonalization than the normalization needed for DQs. Also, DQs offer a superiority in interpolation through sclerp not found in HMs. This advantages can be a catalist to bring applications currently using HMs to use DQs.
- We should expect a growth in dual quaternions use by applications that rely on a strong synergy between translation and rotation. This is the case in most transport systems and types of mobile robots, as well as in computer graphics, where the decoupling of the rotation and translation might lead to unnatural movement.
- From the discussions in Section 6, we have open questions and research gaps that needs to be tackled, such as considerations about coupling and decoupling. When it is better to use one or the other approach? Can a coupled approach be related to energy efficiency? If yes, in which cases?
- Researchers can use existing quaternions techniques and dualize them to obtain equivalent dual quaternions techniques, through the use of the Transference Principle. The former deal with orientation/rotation only and the latter deal with orientation and position/rotation and translation.
- Another research gap lies in the combination of hyper-dual quaternions to existing techniques as Successive Screws Displacements, point and plane notation using dual quaternions and motion interpolation. The combination of the techniques can obtain both what the technique provides plus its derivative.
- Also mentioned in the discussion are applications that benefit from a Screw Theory modeling, which may offer powerful insights on the system in study. Those can use dual quaternions to represent and operate on the elements of Screw Theory (screws, twists, wrenches).
- At last, new/unexpected fields are finding their way into dual quaternions such as Neural Networks and origami systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rooney, J. A Comparison of Representations of General Spatial Screw Displacement. Environ. Plan. B Plan. Des. 1978, 5, 45–88. [Google Scholar] [CrossRef]
- Kim, J.H.; Kumar, V.R. Kinematics of Robot Manipulators via Line Transformations. J. Robot. Syst. 1990, 7, 649–674. [Google Scholar] [CrossRef]
- Wittenburg, J. Dual Quaternions in the Kinematics of Spatial Mechanisms. In Computer Aided Analysis and Optimization of Mechanical System Dynamics; Haug, E.J., Ed.; Springer: Berlin/Heidelberg, Germany, 1984; pp. 129–145. [Google Scholar] [CrossRef]
- Clifford, W. Preliminary Sketch of Biquaternions. Proc. Lond. Math. Soc. 1871, 1, 381–395. [Google Scholar] [CrossRef]
- Kotelnikov, A.P. Screw Calculus and Some Applications to Geometry and Mechanics. Ann. Imp. Univ. Kazan 1895, 24. [Google Scholar]
- Dimentberg, F.M. The Screw Calculus and Its Applications in Mechanics; Technical Report; Foreign Technology Division, Wright-Patterson AFB: Dayton, OH, USA, 1968. [Google Scholar]
- Rooney, J.J. A Unified Theory for the Analysis of Spatial Mechanisms Based on Spherical Trigonometry; Liverpool John Moores University (United Kingdom): Liverpool, UK, 1974. [Google Scholar]
- Martinez, J.R.; Duffy, J. The Principle of Transference: History, Statement and Proof. Mech. Mach. Theory 1993, 28, 165–177. [Google Scholar] [CrossRef]
- Chevallier, D. On the Transference Principle in Kinematics: Its Various Forms and Limitations. Mech. Mach. Theory 1996, 31, 57–76. [Google Scholar] [CrossRef]
- Selig, J.M. A Note on the Principle of Transference. In Proceedings of the Design Engineering Technical Conference, Columbus, OH, USA, 30 October–3 November 1986. [Google Scholar]
- Study, E. Geometrie Der Dynamen; BG Teubner: Berlin, Germany, 1903. [Google Scholar]
- Veldkamp, G.R. On the Use of Dual Numbers, Vectors and Matrices in Instantaneous, Spatial Kinematics. Mech. Mach. Theory 1976, 11, 141–156. [Google Scholar] [CrossRef]
- Samuel, A.; McAree, P.; Hunt, K. Unifying Screw Geometry and Matrix Transformations. Int. J. Robot. Res. 1991, 10, 454–472. [Google Scholar] [CrossRef]
- Ball, R.S. A Treatise on the Theory of Screws, 1900; Cambridge University Press: Cambridge, UK, 1900. [Google Scholar]
- Kuipers, J.B. Quaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace, and Virtual Reality; Princeton University Press: Princeton, NJ, USA, 1999. [Google Scholar]
- Wang, K.; Dai, J.S. The Dual Euler-Rodrigues Formula in Various Mathematical Forms and Their Intrinsic Relations. Mech. Mach. Theory 2023, 181, 105184. [Google Scholar] [CrossRef]
- Dai, J.S. Euler–Rodrigues Formula Variations, Quaternion Conjugation and Intrinsic Connections. Mech. Mach. Theory 2015, 92, 144–152. [Google Scholar] [CrossRef]
- Wang, X.; Zhu, H. On the Comparisons of Unit Dual Quaternion and Homogeneous Transformation Matrix. Adv. Appl. Clifford Algebr. 2014, 24, 213–229. [Google Scholar] [CrossRef]
- Yang, A.T.; Freudenstein, F. Application of Dual-Number Quaternion Algebra to the Analysis of Spatial Mechanisms. J. Appl. Mech. 1964, 31, 300. [Google Scholar] [CrossRef]
- Yang, A.T. Application of Dual Quaternions to the Study of Gyrodynamics. J. Eng. Ind. 1967, 89, 137. [Google Scholar] [CrossRef]
- Hiller, M.; Woernle, C. A Unified Representation of Spatial Displacements. Mech. Mach. Theory 1984, 19, 477–486. [Google Scholar] [CrossRef]
- Gupta, K.C. A Note on Position Analysis of Manipulators. Mech. Mach. Theory 1984, 19, 5–8. [Google Scholar] [CrossRef]
- Gupta, K.C. Kinematic Analysis of Manipulators Using the Zero Reference Position Description. Int. J. Robot. Res. 1986, 5, 5–13. [Google Scholar] [CrossRef]
- Özgür, E.; Mezouar, Y. Kinematic Modeling and Control of a Robot Arm Using Unit Dual Quaternions. Robot. Auton. Syst. 2016, 77, 66–73. [Google Scholar] [CrossRef]
- Husty, M.L. An Algorithm for Solving the Direct Kinematics of General Stewart-Gough Platforms. Mech. Mach. Theory 1996, 31, 365–379. [Google Scholar] [CrossRef]
- Wampler, C.W. Forward Displacement Analysis of General Six-in-Parallel Sps (Stewart) Platform Manipulators Using Soma Coordinates. Mech. Mach. Theory 1996, 31, 331–337. [Google Scholar] [CrossRef]
- Yang, X.; Wu, H.; Li, Y.; Chen, B. A Dual Quaternion Solution to the Forward Kinematics of a Class of Six-DOF Parallel Robots with Full or Reductant Actuation. MMT 2017, 107, 27–36. [Google Scholar] [CrossRef]
- Shabani, A.; Porta, J.M.; Thomas, F. A Branch-and-Prune Method to Solve Closure Equations in Dual Quaternions. Mech. Mach. Theory 2021, 164, 104424. [Google Scholar] [CrossRef]
- Montgomery-Smith, S.; Shy, C. Using Lie Derivatives with Dual Quaternions for Parallel Robots. Machines 2023, 11, 1056. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Temeltas, H. Solution of Inverse Kinematic Problem for Serial Robot Using Dual Quaterninons and Plücker Coordinates. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 338–343. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Cakiray, E.; Temeltas, H. A Comparative Study of Three Inverse Kinematic Methods of Serial Industrial Robot Manipulators in the Screw Theory Framework. Int. J. Adv. Robot. Syst. 2011, 8, 64. [Google Scholar] [CrossRef]
- Josuet, L.; Carlos, B.; Hsien-I, L.; Te-Sheng, H.; Chun-Sheng, W. An Improved Inverse Kinematics Solution of 6R-DOF Robot Manipulators with Euclidean Wrist Using Dual Quaternions. In Proceedings of the 2016 International Automatic Control Conference (CACS), Taichung, Taiwan, 9–11 November 2016; pp. 77–82. [Google Scholar] [CrossRef]
- Amininan, E.; Sheikhha, F.H.; Baghyari, F.; Hosseini, S.; Najmabadi, M.; Akbarzadeh, A. Explicit Inverse Kinematic Solution for the Industrial FUM Articulated Arm Using Dual Quaternion Approach. In Proceedings of the 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 25–27 October 2017; pp. 602–607. [Google Scholar] [CrossRef]
- Kong, X.; He, X.; Li, D. A Double-Faced 6R Single-Loop Overconstrained Spatial Mechanism. J. Mech. Robot. 2018, 10, 031013. [Google Scholar] [CrossRef]
- Cohen, A.; Shoham, M. Application of Hyper-Dual Numbers to Multibody Kinematics. J. Mech. Robot. 2015, 8, 011015. [Google Scholar] [CrossRef]
- Cohen, A.; Shoham, M. Application of Hyper-Dual Numbers to Rigid Bodies Equations of Motion. Mech. Mach. Theory 2017, 111, 76–84. [Google Scholar] [CrossRef]
- Cohen, A.; Shoham, M. Principle of Transference – An Extension to Hyper-Dual Numbers. Mech. Mach. Theory 2018, 125, 101–110. [Google Scholar] [CrossRef]
- Cohen, A.; Shoham, M. Hyper Dual Quaternions Representation of Rigid Bodies Kinematics. Mech. Mach. Theory 2020, 150, 103861. [Google Scholar] [CrossRef]
- Yang, A.T. Acceleration Analysis of Spatial Four-Link Mechanisms. J. Eng. Ind. 1966, 88, 296. [Google Scholar] [CrossRef]
- Roth, B. Finite-Position Theory Applied to Mechanism Synthesis. J. Appl. Mech. 1967, 34, 599–605. [Google Scholar] [CrossRef]
- Roth, B. The Kinematics of Motion Through Finitely Separated Positions. J. Appl. Mech. 1967, 34, 591–598. [Google Scholar] [CrossRef]
- Kohli, D.; Soni, A.H. Kinematic Analysis of Spatial Mechanisms Via Successive Screw Displacements. J. Eng. Ind. 1975, 97, 739. [Google Scholar] [CrossRef]
- Brodsky, V.; Shoham, M. The Dual Inertia Operator and Its Application to Robot Dynamics. J. Mech. Des. 1994, 116, 1089. [Google Scholar] [CrossRef]
- Ge, Q.J.; Ravani, B. Geometric Construction of Bézier Motions. J. Mech. Des. 1994, 116, 749. [Google Scholar] [CrossRef]
- Ge, Q.J.; Ravani, B. Computer Aided Geometric Design of Motion Interpolants. J. Mech. Des. 1994, 116, 756–762. [Google Scholar] [CrossRef]
- Figueredo, L.; Adorno, B.; Ishihara, J.; Borges, G. Robust Kinematic Control of Manipulator Robots Using Dual Quaternion Representation. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1949–1955. [Google Scholar] [CrossRef]
- Filipe, N.; Tsiotras, P. Adaptive Position and Attitude-Tracking Controller for Satellite Proximity Operations Using Dual Quaternions. J. Guid. Control. Dyn. 2015, 38, 566–577. [Google Scholar] [CrossRef]
- Abaunza, H.; Castillo, P.; Lozano, R.; Victorino, A. Quadrotor Aerial Manipulator Based on Dual Quaternions. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 152–161. [Google Scholar] [CrossRef]
- Cai, J.; Zhang, Y.; Xu, Y.; Zhou, Y.; Feng, J. The Foldability of Cylindrical Foldable Structures Based on Rigid Origami. J. Mech. Des. 2016, 138, 031401. [Google Scholar] [CrossRef]
- Chandra, R.; Mateo, C.M.; Corrales-Ramon, J.A.; Mezouar, Y. Dual-Arm Coordination Using Dual Quaternions and Virtual Mechanisms. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 759–765. [Google Scholar] [CrossRef]
- Valverde, A.; Tsiotras, P. Spacecraft Robot Kinematics Using Dual Quaternions. Robotics 2018, 7, 64. [Google Scholar] [CrossRef]
- Valverde, A.; Tsiotras, P. Dual Quaternion Framework for Modeling of Spacecraft-Mounted Multibody Robotic Systems. Front. Robot. AI 2018, 5, 128. [Google Scholar] [CrossRef]
- Miranda de Farias, C.; da Cruz Figueredo, L.F.; Yoshiyuki Ishihara, J. Performance Study on dqRNEA—A Novel Dual Quaternion Based Recursive Newton-Euler Inverse Dynamics Algorithms. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 94–101. [Google Scholar] [CrossRef]
- Afonso Silva, F.F.; José Quiroz-Omaña, J.; Vilhena Adorno, B. Dynamics of Mobile Manipulators Using Dual Quaternion Algebra. J. Mech. Robot. 2022, 14, 061005. [Google Scholar] [CrossRef]
- Cohen, A.; Taub, B.; Shoham, M. Dual Quaternions Representation of Lagrange’s Dynamic Equations. J. Mech. Robot. 2024, 16, 041004. [Google Scholar] [CrossRef]
- Walker, M.W.; Shao, L.; Volz, R.A. Estimating 3-D Location Parameters Using Dual Number Quaternions. CVGIP Image Underst. 1991, 54, 358–367. [Google Scholar] [CrossRef]
- Qiao, B.; Tang, S.; Ma, K.; Liu, Z. Relative Position and Attitude Estimation of Spacecrafts Based on Dual Quaternion for Rendezvous and Docking. Acta Astronaut. 2013, 91, 237–244. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Wu, K.; Yang, H.; Zhang, H. A Dual Quaternion-Based, Closed-Form Pairwise Registration Algorithm for Point Clouds. ISPRS J. Photogramm. Remote Sens. 2014, 94, 63–69. [Google Scholar] [CrossRef]
- Sheng, Q.H.; Shao, S.; Xiao, H.; Zhu, F.; Wang, Q.; Zhang, B. Relative Orientation Dependent on Dual Quaternions. Photogramm. Rec. 2015, 30, 300–317. [Google Scholar] [CrossRef]
- Xia, W.; Han, S.; Cao, J.; Cao, J.; Yu, H. Scaling Iterative Closest Point Algorithm Using Dual Number Quaternions. Opt.-Int. J. Light Electron Opt. 2017, 140, 1099–1109. [Google Scholar] [CrossRef]
- Kavan, L.; Collins, S.; O’Sullivan, C.; Zara, J. Dual Quaternions for Rigid Transformation Blending; Tech. Rep. TCD-CS-2006-46; Trinity College Dublin: Dublin, Ireland, 2006; p. 10. [Google Scholar]
- Goodsitt, J.E.; Havey, R.M.; Khayatzadeh, S.; Voronov, L.I.; Patwardhan, A.G. Interpolation of Three Dimensional Kinematics with Dual-Quaternions. J. Biomech. 2017, 51, 105–110. [Google Scholar] [CrossRef] [PubMed]
- Allmendinger, F.; Charaf Eddine, S.; Corves, B. Coordinate-Invariant Rigid-Body Interpolation on a Parametric C 1 Dual Quaternion Curve. Mech. Mach. Theory 2018, 121, 731–744. [Google Scholar] [CrossRef]
- Liu, K.; Wu, W.; Tang, K.; He, L. IMU Signal Generator Based on Dual Quaternion Interpolation for Integration Simulation. Sensors 2018, 18, 2721. [Google Scholar] [CrossRef]
- Oh, Y.S.; Abhishesh, P.; Ryuh, B.S. Study on Robot Trajectory Planning by Robot End-Effector Using Dual Curvature Theory of the Ruled Surface. Int. J. Mech. Mater. Eng. 2017, 11, 6. [Google Scholar]
- Ge, Q.J.; Yu, Z.; Arbab, M.; Langer, M.P. On the Computation of Mean and Variance of Spatial Displacements. J. Mech. Robot. 2024, 16, 011006. [Google Scholar] [CrossRef]
- Sarker, A.; Sinha, A.; Chakraborty, N. On Screw Linear Interpolation for Point-to-Point Path Planning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 9480–9487. [Google Scholar] [CrossRef]
- Laha, R.; Rao, A.; Figueredo, L.F.C.; Chang, Q.; Haddadin, S.; Chakraborty, N. Point-to-Point Path Planning Based on User Guidance and Screw Linear Interpolation. In Proceedings of the ASME 2021 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Virtual Online, 17–19 August 2021; p. V08BT08A010. [Google Scholar] [CrossRef]
- Wang, D.; Cao, W.; Takanishi, A. Dual-Quaternion-Based SLERP MPC Local Controller for Safe Self-Driving of Robotic Wheelchairs. Robotics 2023, 12, 153. [Google Scholar] [CrossRef]
- Daniilidis, K. Hand-Eye Calibration Using Dual Quaternions. Int. J. Robot. Res. 1999, 18, 286–298. [Google Scholar] [CrossRef]
- Wang, G.; Liu, X.; Han, S. A Method of Robot Base Frame Calibration by Using Dual Quaternion Algebra. IEEE Access 2018, 6, 74865–74873. [Google Scholar] [CrossRef]
- Fu, Z.; Pan, J.; Spyrakos-Papastavridis, E.; Chen, X.; Li, M. A Dual Quaternion-Based Approach for Coordinate Calibration of Dual Robots in Collaborative Motion. IEEE Robot. Autom. Lett. 2020, 5, 4086–4093. [Google Scholar] [CrossRef]
- Wang, X.; Huang, J.; Song, H. Robot-World and Hand–Eye Calibration Based on Quaternion: A New Method and an Extension of Classic Methods, with Their Comparisons. Mech. Mach. Theory 2023, 179, 105127. [Google Scholar] [CrossRef]
- Wang, X.; Song, H. One-Step Solving the Hand-Eye Calibration by Dual Kronecker Product. J. Mech. Robot. 2024, 16, 101008. [Google Scholar] [CrossRef]
- Wang, X.; Sun, H.; Liu, C.; Song, H. Dual Quaternion Operations for Rigid Body Motion and Their Application to the Hand–Eye Calibration. Mech. Mach. Theory 2024, 193, 105566. [Google Scholar] [CrossRef]
- Perez, A.; McCarthy, J.M. Dual Quaternion Synthesis of Constrained Robotic Systems. J. Mech. Des. 2004, 126, 425. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, X.; Hu, D.; Li, T.; Lian, J. Strapdown Inertial Navigation System Algorithms Based on Dual Quaternions. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 110–132. [Google Scholar] [CrossRef]
- Han, D.P.; Wei, Q.; Li, Z.X. Kinematic Control of Free Rigid Bodies Using Dual Quaternions. Int. J. Autom. Comput. 2008, 5, 319–324. [Google Scholar] [CrossRef]
- Wang, X.; Yu, C. Unit-Dual-Quaternion-Based PID Control Scheme for Rigid-Body Transformation*. IFAC Proc. Vol. 2011, 44, 9296–9301. [Google Scholar] [CrossRef]
- Wang, X.; Han, D.; Yu, C.; Zheng, Z. The Geometric Structure of Unit Dual Quaternion with Application in Kinematic Control. J. Math. Anal. Appl. 2012, 389, 1352–1364. [Google Scholar] [CrossRef]
- Kussaba, H.T.; Figueredo, L.F.; Ishihara, J.Y.; Adorno, B.V. Hybrid Kinematic Control for Rigid Body Pose Stabilization Using Dual Quaternions. J. Frankl. Inst. 2017, 354, 2769–2787. [Google Scholar] [CrossRef]
- Wang, X.; Yu, C. Unit Dual Quaternion-Based Feedback Linearization Tracking Problem for Attitude and Position Dynamics. Syst. Control Lett. 2013, 62, 225–233. [Google Scholar] [CrossRef]
- Silva, F.F.A.; Adorno, B.V. Whole-Body Control of a Mobile Manipulator Using Feedback Linearization Based on Dual Quaternions. In Proceedings of the 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Recife, Brazil, 8–12 October 2016; pp. 293–298. [Google Scholar] [CrossRef]
- Antonello, A.; Michieletto, G.; Antonello, R.; Cenedese, A. A Dual Quaternion Feedback Linearized Approach for Maneuver Regulation of Rigid Bodies. IEEE Control Syst. Lett. 2018, 2, 327–332. [Google Scholar] [CrossRef]
- Silva, F.F.A.; Adorno, B.V. Whole-Body Control of a Mobile Manipulator Using Feedback Linearization and Dual Quaternion Algebra. J. Intell. Robot. Syst. 2018, 91, 249–262. [Google Scholar] [CrossRef]
- Chandra, R.; Corrales-Ramon, J.A.; Mezouar, Y. Resolved-Acceleration Control of Serial Robotic Manipulators Using Unit Dual Quaternions. IFAC-PapersOnLine 2020, 53, 8500–8505. [Google Scholar] [CrossRef]
- Lee, U.; Mesbahi, M. Optimal Power Descent Guidance with 6-DoF Line of Sight Constraints via Unit Dual Quaternions. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Lee, U.; Mesbahi, M. Constrained Autonomous Precision Landing via Dual Quaternions and Model Predictive Control. J. Guid. Control. Dyn. 2017, 40, 292–308. [Google Scholar] [CrossRef]
- Filipe, N.; Tsiotras, P. Adaptive Model-Independent Tracking of Rigid Body Position and Attitude Motion with Mass and Inertia Matrix Identification Using Dual Quaternions. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar] [CrossRef]
- AlAttar, A.; Kormushev, P. Kinematic-Model-Free Orientation Control for Robot Manipulation Using Locally Weighted Dual Quaternions. Robotics 2020, 9, 76. [Google Scholar] [CrossRef]
- Dong, H.; Hu, Q.; Friswell, M.I.; Ma, G. Dual-Quaternion-Based Fault-Tolerant Control for Spacecraft Tracking With Finite-Time Convergence. IEEE Trans. Contr. Syst. Technol. 2017, 25, 1231–1242. [Google Scholar] [CrossRef]
- Huang, X.; Yan, Y.; Zhou, Y.; Yang, Y. Dual-Quaternion Based Distributed Coordination Control of Six-DOF Spacecraft Formation with Collision Avoidance. Aerosp. Sci. Technol. 2017, 67, 443–455. [Google Scholar] [CrossRef]
- Valverde, A.; Tsiotras, P. Relative Pose Stabilization Using Backstepping Control with Dual Quaternions. In Proceedings of the 2018 Space Flight Mechanics Meeting, American Institute of Aeronautics and Astronautics, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Stian Andersen, T.; Johansen, T.A.; Kristiansen, R. Dual-Quaternion Backstepping Control for a Fully-Actuated Rigid-Body. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 5653–5658. [Google Scholar] [CrossRef]
- Wang, J.; Sun, Z. 6-DOF Robust Adaptive Terminal Sliding Mode Control for Spacecraft Formation Flying. Acta Astronaut. 2012, 73, 76–87. [Google Scholar] [CrossRef]
- Abaunza, H.; Castillo, P.; Victorino, A.; Lozano, R. Dual Quaternion Modeling and Control of a Quad-rotor Aerial Manipulator. J. Intell. Robot. Syst. 2017, 88, 267–283. [Google Scholar] [CrossRef]
- Dong, H.; Hu, Q.; Akella, M.R. Dual-Quaternion-Based Spacecraft Autonomous Rendezvous and Docking Under Six-Degree-of-Freedom Motion Constraints. J. Guid. Control. Dyn. 2018, 41, 1150–1162. [Google Scholar] [CrossRef]
- Dong, H.; Hu, Q.; Akella, M.R.; Mazenc, F. Partial Lyapunov Strictification: Dual-Quaternion-Based Observer for 6-DOF Tracking Control. IEEE Trans. Contr. Syst. Technol. 2019, 27, 2453–2469. [Google Scholar] [CrossRef]
- Stanfield, K.; Bani Younes, A. Dual-Quaternion Analytic LQR Control Design for Spacecraft Proximity Operations. Sensors 2021, 21, 3597. [Google Scholar] [CrossRef] [PubMed]
- Huo, B.; Du, M.; Yan, Z. Adaptive Sliding Mode Attitude Tracking Control for Rigid Spacecraft Considering the Unwinding Problem. Mathematics 2023, 11, 4372. [Google Scholar] [CrossRef]
- Filipe, N.; Kontitsis, M.; Tsiotras, P. Extended Kalman Filter for Spacecraft Pose Estimation Using Dual Quaternions. J. Guid. Control. Dyn. 2015, 38, 1625–1641. [Google Scholar] [CrossRef]
- Reynolds, T.P.; Szmuk, M.; Malyuta, D.; Mesbahi, M.; Açıkmeşe, B.; Carson, J.M. Dual Quaternion-Based Powered Descent Guidance with State-Triggered Constraints. J. Guid. Control. Dyn. 2020, 43, 1584–1599. [Google Scholar] [CrossRef]
- Sun, X.; Wu, X.; Chen, W.; Hao, Y.; Mantey, K.A.; Zhao, H. Dual Quaternion Based Dynamics Modeling for Electromagnetic Collocated Satellites of Diffraction Imaging on Geostationary Orbit. Acta Astronaut. 2020, 166, 52–58. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Q.; Liu, Q. Developing a Static Kinematic Model for Continuum Robots Using Dual Quaternions for Efficient Attitude and Trajectory Planning. Appl. Sci. 2023, 13, 11289. [Google Scholar] [CrossRef]
- Kong, X. Reconfiguration Analysis of Multimode Single-Loop Spatial Mechanisms Using Dual Quaternions. J. Mech. Robot. 2017, 9, 051002. [Google Scholar] [CrossRef]
- Liu, K.; Yu, J.; Kong, X. Synthesis of Multi-Mode Single-Loop Bennett-based Mechanisms Using Factorization of Motion Polynomials. Mech. Mach. Theory 2021, 155, 104110. [Google Scholar] [CrossRef]
- Liu, K.; Yu, J.; Kong, X. Structure Synthesis and Reconfiguration Analysis of Variable-Degree-of-Freedom Single-Loop Mechanisms With Prismatic Joints Using Dual Quaternions. J. Mech. Robot. 2022, 14, 021009. [Google Scholar] [CrossRef]
- Frischauf, J.; Pfurner, M.; Scharler, D.F.; Schröcker, H.P. A Multi-Bennett 8R Mechanism Obtained from Factorization of Bivariate Motion Polynomials. Mech. Mach. Theory 2023, 180, 105143. [Google Scholar] [CrossRef]
- Chen, G.; Li, T.; Chu, M.; Jia, Q.X.; Sun, H.X. Review on Kinematics Calibration Technology of Serial Robots. Int. J. Precis. Eng. Manuf. 2014, 15, 1759–1774. [Google Scholar] [CrossRef]
- Li, G.; Zhang, F.; Fu, Y.; Wang, S. Kinematic Calibration of Serial Robot Using Dual Quaternions. Ind. Robot. 2019, 46, 247–258. [Google Scholar] [CrossRef]
- Luo, J.; Chen, S.; Zhang, C.; Chen, C.Y.; Yang, G. Efficient Kinematic Calibration for Articulated Robot Based on Unit Dual Quaternion. IEEE Trans. Ind. Inf. 2023, 19, 11898–11909. [Google Scholar] [CrossRef]
- Luo, J.; Chen, S.; Jiang, D.; Zheng, T.; Li, H.; Fang, Z.; Zhang, C.; Yang, G. Efficient Kinematic Calibration for Parallel Manipulators Based on Unit Dual Quaternion. IEEE Trans. Ind. Inf. 2024, 20, 6791–6801. [Google Scholar] [CrossRef]
- Cheng, J.; Kim, J.; Jiang, Z.; Che, W. Dual Quaternion-Based Graphical SLAM. Robot. Auton. Syst. 2016, 77, 15–24. [Google Scholar] [CrossRef]
- Bultmann, S.; Li, K.; Hanebeck, U.D. Stereo Visual SLAM Based on Unscented Dual Quaternion Filtering. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; p. 8. [Google Scholar]
- Sveier, A.; Egeland, O. Pose Estimation Using Dual Quaternions and Moving Horizon Estimation. IFAC-PapersOnLine 2018, 51, 186–191. [Google Scholar] [CrossRef]
- Sveier, A.; Egeland, O. Dual Quaternion Particle Filtering for Pose Estimation. IEEE Trans. Contr. Syst. Technol. 2020, 29, 2012–2025. [Google Scholar] [CrossRef]
- Giribet, J.I.; Colombo, L.; Moreno, P.; Mas, I.; Dimarogonas, D.V. Dual Quaternion Cluster-Space Formation Control. IEEE Robot. Autom. Lett. 2021, 6, 6789–6796. [Google Scholar] [CrossRef]
- Mas, I.; Moreno, P.; Giribet, J.; Barzi, D.V. Formation Control for Multi-Domain Autonomous Vehicles Based on Dual Quaternions. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 723–730. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, H.; Li, X.; Ding, H. Path Smoothing for Five-Axis Machine Tools Using Dual Quaternion Approximation with Dominant Points. Int. J. Precis. Eng. Manuf. 2017, 18, 711–720. [Google Scholar] [CrossRef]
- Yacob, F.; Semere, D. Variation Compensation in Machining Processes Using Dual Quaternions. Procedia CIRP 2020, 93, 879–884. [Google Scholar] [CrossRef]
- Selig, J.M. Clifford Algebra of Points, Lines and Planes. Robotica 2000, 18, 545–556. [Google Scholar] [CrossRef]
- Radavelli, L.A.; De Pieri, E.R.; Martins, D.; Simoni, R. Points, lines, screws and planes in dual quaternions kinematics. In Advances in Robot Kinematics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 285–293. [Google Scholar]
- Schwung, A.; Poppelbaum, J.; Nutakki, P.C. Rigid Body Movement Prediction Using Dual Quaternion Recurrent Neural Networks. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; pp. 756–761. [Google Scholar] [CrossRef]
- Schilling, M. Hierarchical Dual Quaternion-Based Recurrent Neural Network as a Flexible Internal Body Model. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Jianguo, C.; Yangqing, L.; Ruijun, M.; Jian, F.; Ya, Z. Nonrigidly Foldability Analysis of Kresling Cylindrical Origami. J. Mech. Robot. 2017, 9, 041018. [Google Scholar] [CrossRef]
- Wu, W.; You, Z. Modelling Rigid Origami with Quaternions and Dual Quaternions. Proc. R. Soc. A 2010, 466, 2155–2174. [Google Scholar] [CrossRef]
- Brodsky, V.; Shoham, M. Dual Numbers Representation of Rigid Body Dynamics. Mech. Mach. Theory 1999, 34, 693–718. [Google Scholar] [CrossRef]
- Tsai, L.W. Robot Analysis: The Mechanics of Serial and Parallel Manipulators; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Rocha, C.; Tonetto, C.; Dias, A. A Comparison between the Denavit–Hartenberg and the Screw-Based Methods Used in Kinematic Modeling of Robot Manipulators. Robot. Comput.-Integr. Manuf. 2011, 27, 723–728. [Google Scholar] [CrossRef]
- Yang, A.T. Static Force and Torque Analysis of Spherical Four-Bar Mechanisms. J. Eng. Ind. 1965, 87, 221. [Google Scholar] [CrossRef]
- Fike, J.; Alonso, J. The Development of Hyper-Dual Numbers for Exact Second-Derivative Calculations. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar] [CrossRef]
- Merlet, J.P. Jacobian, Manipulability, Condition Number, and Accuracy of Parallel Robots. J. Mech. Des. 2006, 128, 199–206. [Google Scholar] [CrossRef]
- Han, D.; Wei, Q.; Li, Z.; Sun, W. Control of Oriented Mechanical Systems: A Method Based on Dual Quaternion. IFAC Proc. Vol. 2008, 41, 3836–3841. [Google Scholar] [CrossRef]
- Perez, A.; McCarthy, J. Sizing a Serial Chain to Fit a Task Trajectory Using Clifford Algebra Exponentials. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4709–4715. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Aspragathos, N.A.; Dimitros, J.K. A Comparative Study of Three Methods for Robot Kinematics. IEEE Trans. Syst. 1998, 28, 11. [Google Scholar] [CrossRef] [PubMed]
- Pham, H.; Adorno, B.; Perdereau, V.; Fraisse, P. Set-Point Control of Robot End-Effector Pose Using Dual Quaternion Feedback. Robot. Comput.-Integr. Manuf. 2018, 52, 100–110. [Google Scholar] [CrossRef]
- Radavelli, L.; Simoni, R.; De Pieri, E.; Martins, D. A Comparative Study of the Kinematics of Robots Manipulators by Denavit-Hartenberg and Dual Quaternion. Mec. Comput. 2012, 31, 2833–2848. [Google Scholar]
- Adorno, B.V.; Marinho, M.M. DQ Robotics: A Library for Robot Modeling and Control. IEEE Robot. Autom. Mag. 2021, 28, 102–116. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farias, J.G.; De Pieri, E.; Martins, D. A Review on the Applications of Dual Quaternions. Machines 2024, 12, 402. https://doi.org/10.3390/machines12060402
Farias JG, De Pieri E, Martins D. A Review on the Applications of Dual Quaternions. Machines. 2024; 12(6):402. https://doi.org/10.3390/machines12060402
Chicago/Turabian StyleFarias, João Gutemberg, Edson De Pieri, and Daniel Martins. 2024. "A Review on the Applications of Dual Quaternions" Machines 12, no. 6: 402. https://doi.org/10.3390/machines12060402
APA StyleFarias, J. G., De Pieri, E., & Martins, D. (2024). A Review on the Applications of Dual Quaternions. Machines, 12(6), 402. https://doi.org/10.3390/machines12060402