
Development of a Multi-Robot System for Pier Construction

 , and
, and 
Abstract
1. Introduction
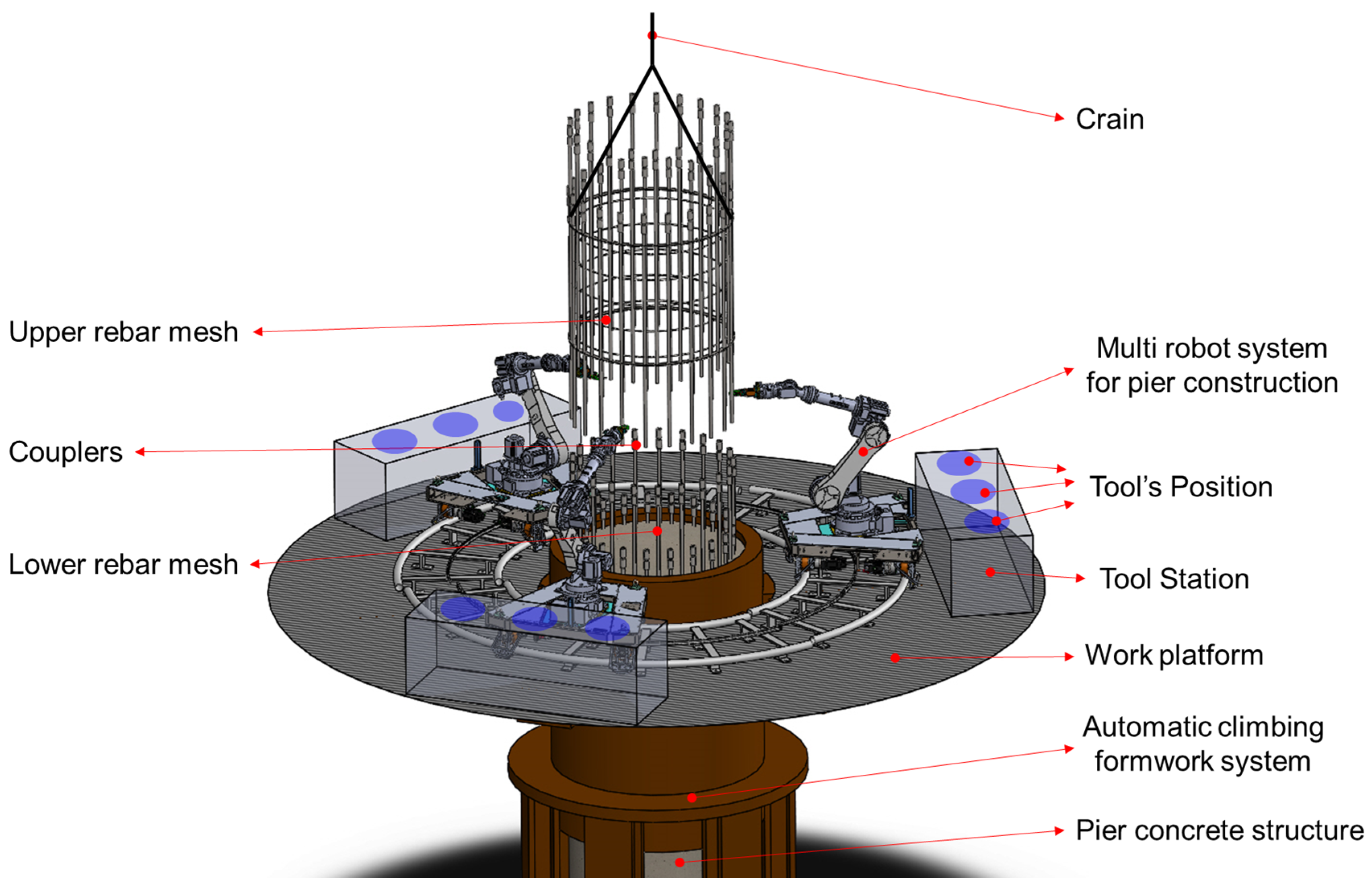
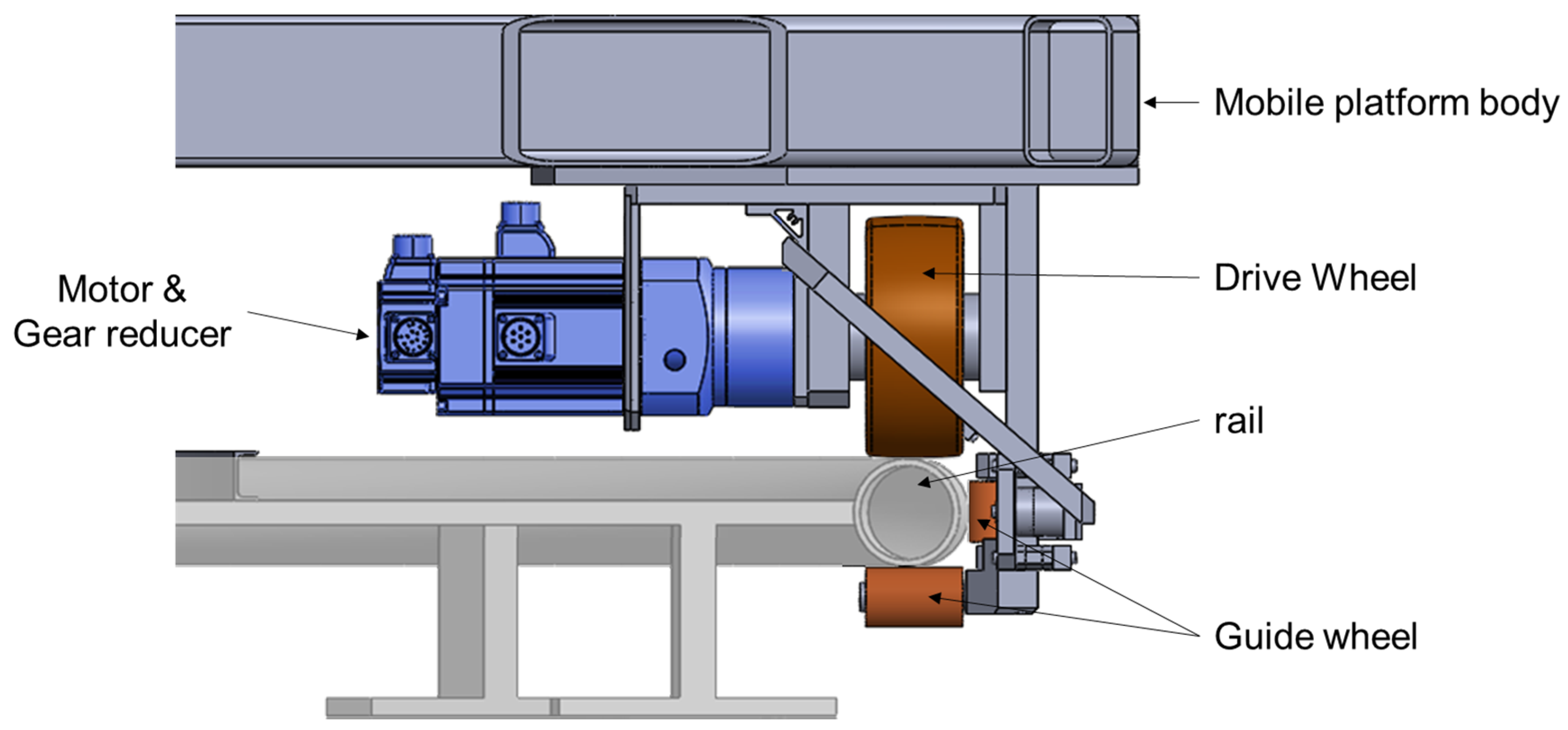
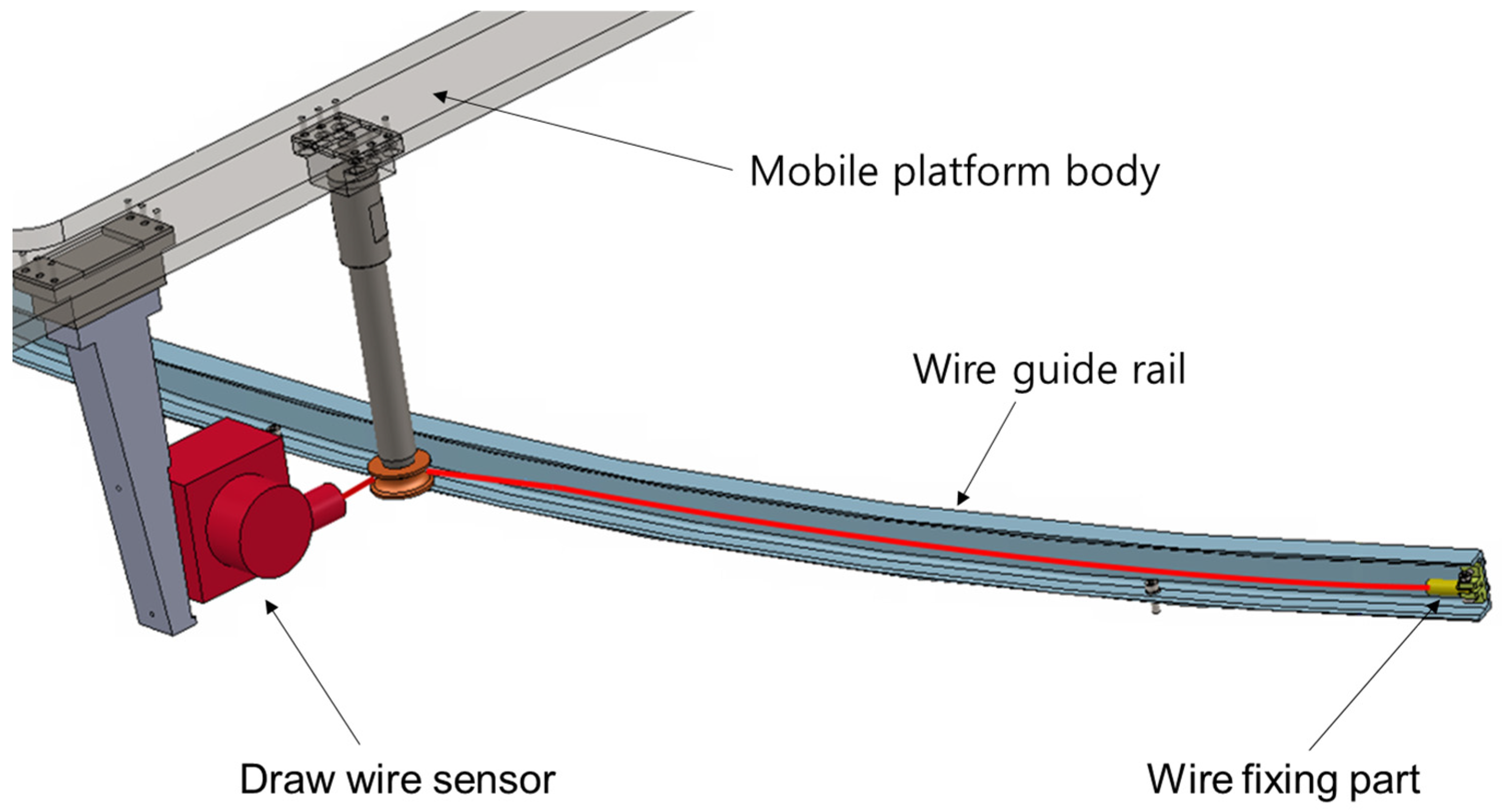
2. Multi-Robot System for Pier Construction
3. Control Algorithm
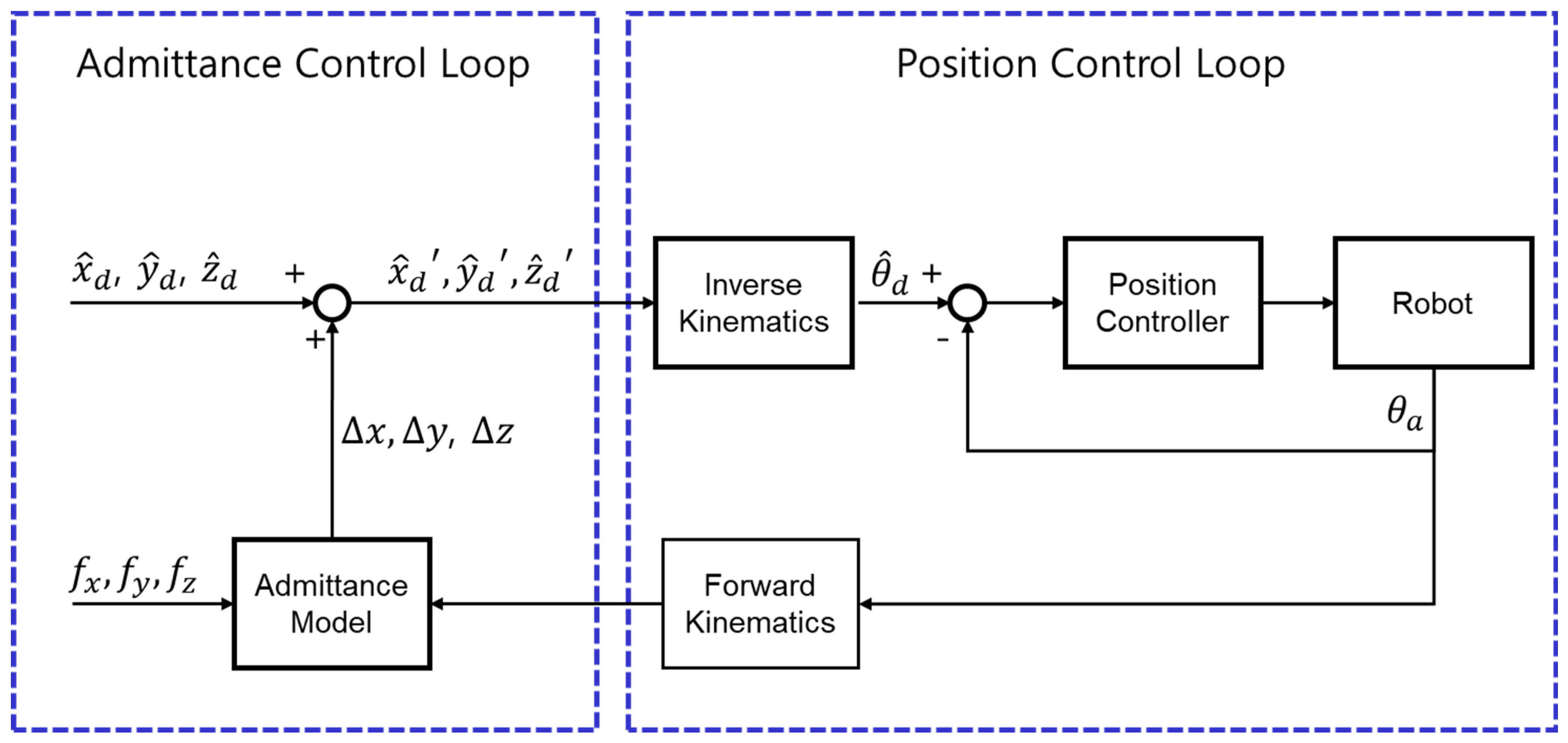
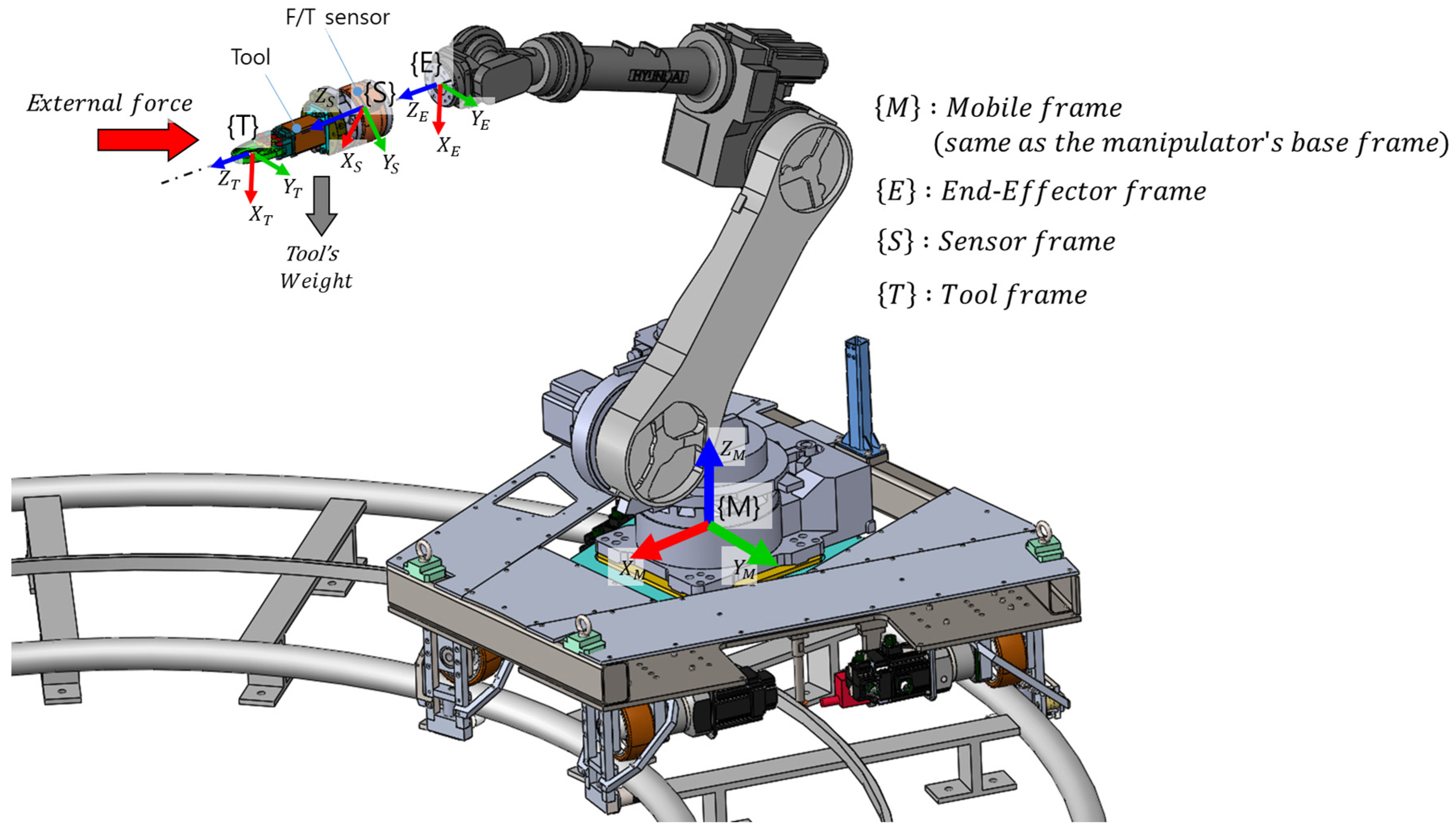
3.1. Admittance Control for Pier Construction Tasks
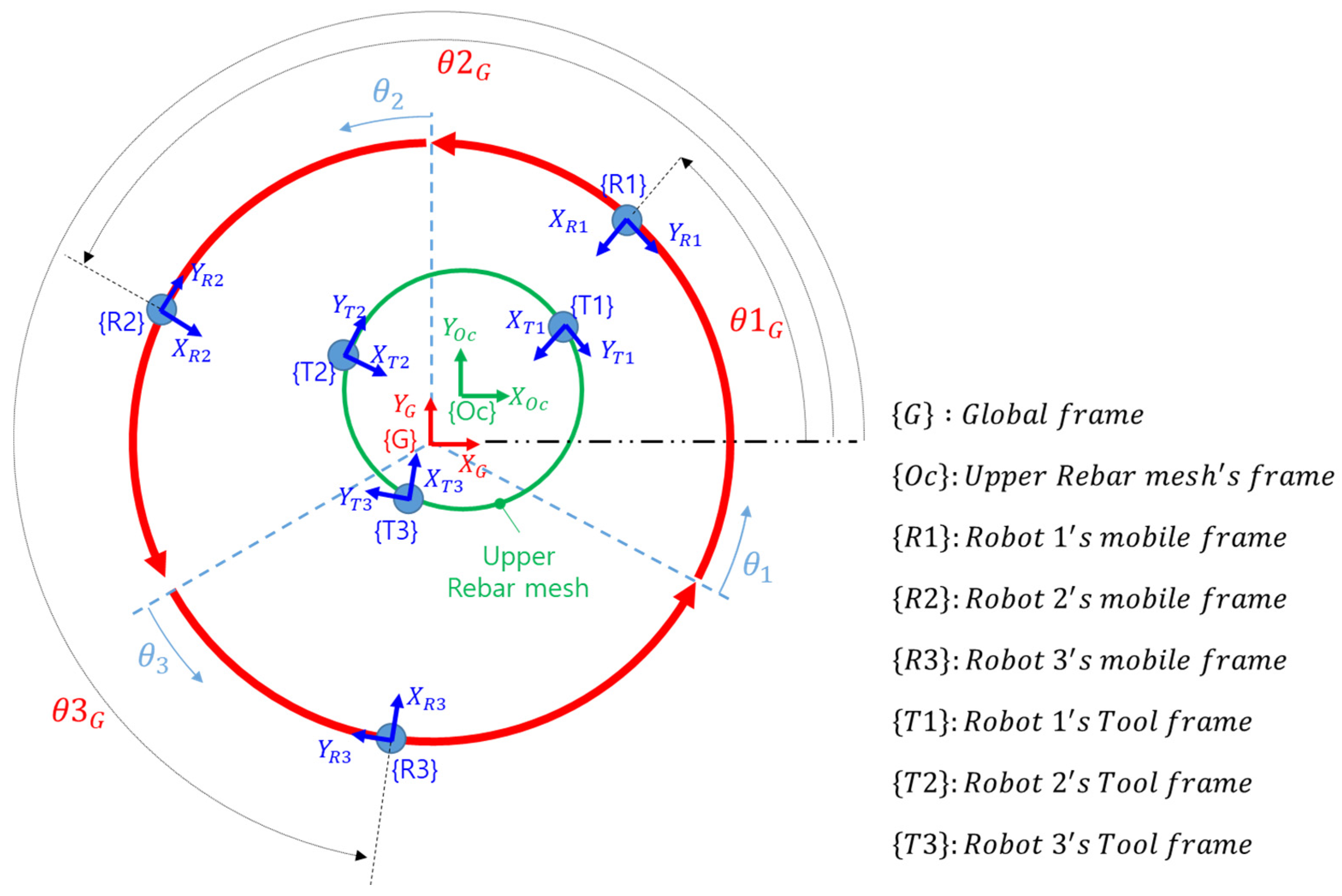
3.2. Synchronization Control
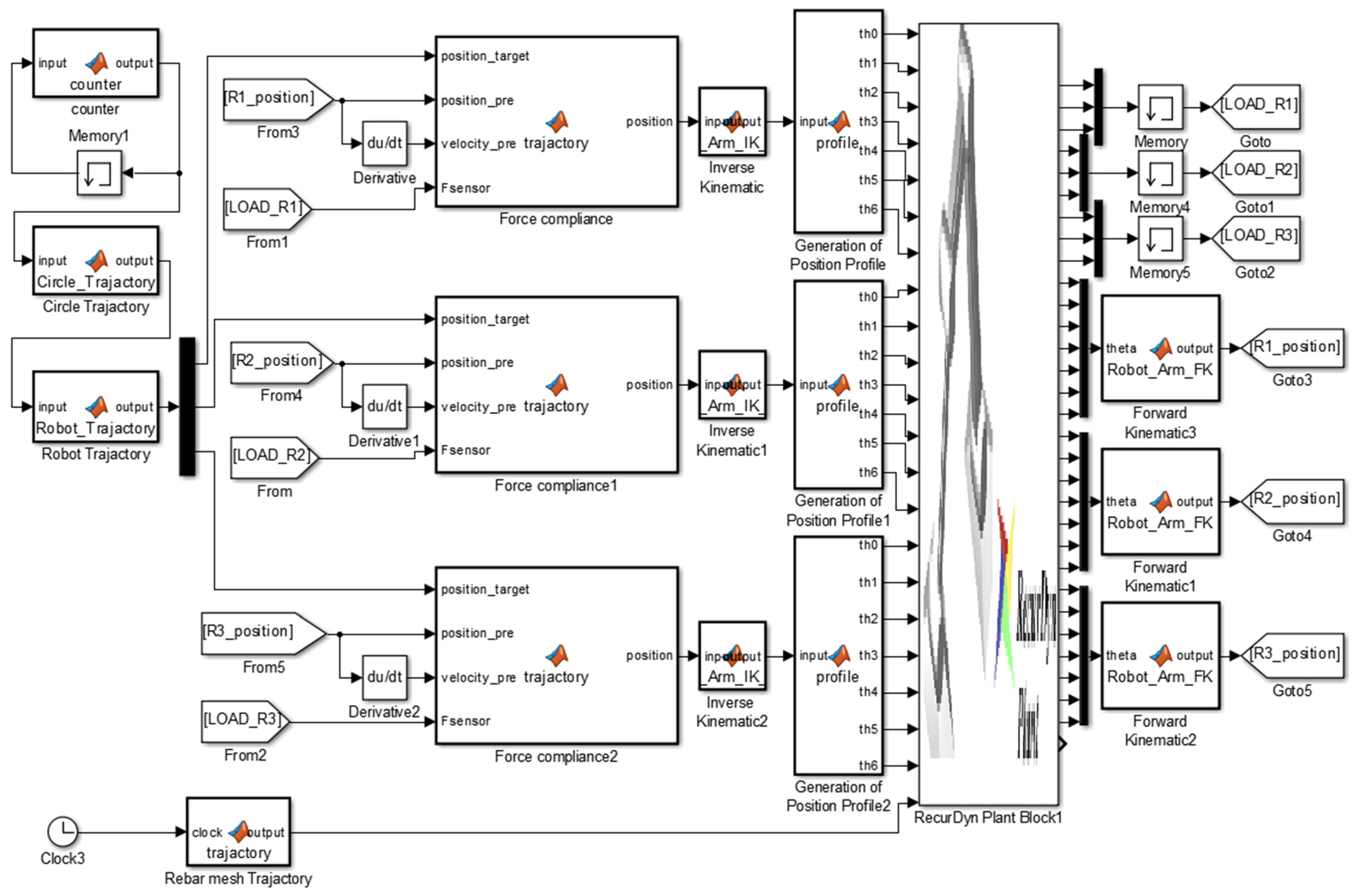
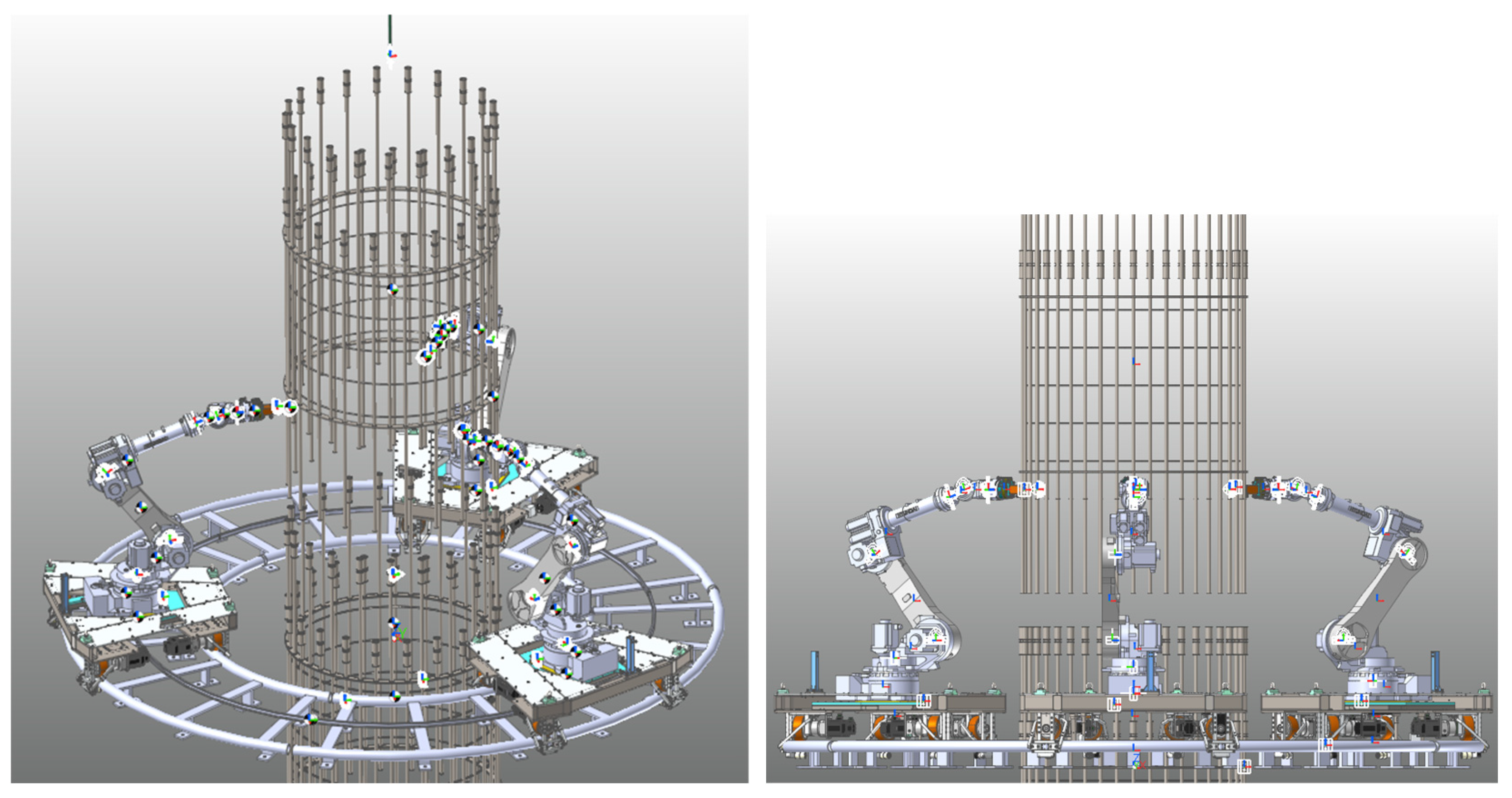
4. Simulation
5. Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farhangdoust, S.; Mehrabi, A. Health monitoring of closure joints in accelerated bridge construction: A review of non-destructive testing application. J. Adv. Concr. Technol. 2019, 17, 381–404. [Google Scholar] [CrossRef]
- Gibb, S.; La, H.M.; Le, T.; Nguyen, L.; Schmid, R.; Pham, H. Nondestructive evaluation sensor fusion with autonomous robotic system for civil infrastructure inspection. J. Field Robot. 2018, 35, 988–1004. [Google Scholar] [CrossRef]
- Sun, H.; Zhu, J.; Ham, S. Automated acoustic scanning system for delamination detection in concrete bridge decks. J. Bridge Eng. 2018, 23, 04018027. [Google Scholar] [CrossRef]
- La, H.M.; Gucunski, N.; Dana, K.; Kee, S.H. Development of an autonomous bridge deck inspection robotic system. J. Field Robot. 2017, 34, 1489–1504. [Google Scholar] [CrossRef]
- Kang, S.P.; Han, C.S.; Kang, M.S.; Lee, S.H.; Moon, S.H. Communication system design for the Robotic Building Maintenance System. In Proceedings of the Korean Society for Precision Engineering, Spring Conference, Pyeongchang, Republic of Korea, 30 January–1 February 2013; pp. 209–210. [Google Scholar]
- Jeong, M.S.; Lee, J.; Hong, S.H.; Jang, M.; Shin, D.; Hahm, J.; Seo, J.H. Development of the Pipe Construction Robot for Rehabilitation Work Process of the Water Pipe Lines. J. Korea Robot. Soc. 2021, 16, 223–231. [Google Scholar] [CrossRef]
- Baek, C.S.; Seo, J.H.; Cho, J.S.; Ahn, J.W.; Cho, K.H. 3D Printed Building Technology using Recycling Materials. J. Korean Inst. Resour. Recycl. 2018, 27, 3–13. [Google Scholar]
- Lee, J.W.; Park, J.W.; Suh, J.H.; Choi, Y.H. Redundant Architectural Design of Hydraulic Control System for Reliability Improvement of Underwater Construction Robot. J. Ocean. Eng. Technol. 2015, 29, 380–385. [Google Scholar] [CrossRef]
- Lee, S.Y.; Park, Y.S.; Lee, S.W.; Chung, T.; Song, J.J. Conceptual Design of Remote Precise Installation System for Bridge Girders. J. Korea Robot. Soc. 2021, 16, 199–206. [Google Scholar] [CrossRef]
- Kim, H.G.; Choi, Y.H.; Park, J.W.; Lee, J.W.; Kim, J.G.; Lee, H.J.; Lee, J.D.; Suh, J.H. Active control for rock grinding works of an underwater construction robot consisting of hydraulic rotary and linear actuators. In Proceedings of the International Conference on Advanced Engineering Theory and Applications, Busan, Republic of Korea, 8–10 December 2016; pp. 713–722. [Google Scholar]
- Yoon, H.; Chin, W.J.; Kim, H.S.; Kim, Y.J. Development of an Efficient Tapered Slip-Form System Applying BIM Technology. Engineering 2013, 5, 693–699. [Google Scholar] [CrossRef]
- Kim, H.G.; Kim, J.C.; Hwang, J.H.; Park, J.W.; Park, J.H.; Suh, J.H.; Choi, Y.H. Development of a Mobile Manipulation System for Pier Construction. J. Korean Soc. Power Syst. Eng. 2021, 25, 38–44. [Google Scholar] [CrossRef]
- Acharya, M.; Duran, J.; Ebrahimpour, A.; Cantrell, J.; Mashal, M. A Fully Precast Pier System for Accelerated Bridge Construction in Seismic Regions. J. Bridge Eng. 2023, 28, 04023068. [Google Scholar] [CrossRef]
- Chung, T.; Lee, S.W.; Lee, S.Y.; Ryu, J.H. Design of Manipulator End Effectors for Pier Column Construction. J. Korea Robot. Soc. 2021, 16, 207–215. [Google Scholar] [CrossRef]
- Bompa, D.V.; Elghazouli, A.Y. Ductility considerations for mechanical reinforcement couplers. Structures 2017, 12, 115–119. [Google Scholar] [CrossRef]
- Suprenant, B.A. Concrete Vibration, Concrete Construction. 1988, pp. 563–568. Available online: https://www.sefindia.org/forum/files/c880563_206.pdf (accessed on 31 May 2024).
- Robotic Tool Changers. Available online: https://www.ati-ia.com/products/toolchanger/robot_tool_changer.aspx (accessed on 1 April 2024).
- Ye, D.; Yang, C.; Jiang, Y.; Zhang, H. Hybrid impedance and admittance control for optimal robot–environment interaction. Robotica 2024, 42, 510–535. [Google Scholar] [CrossRef]
- Sun, Y.; Van, M.; McIlvanna, S.; Minh, N.N.; McLoone, S.; Ceglarek, D. Adaptive admittance control for safety-critical physical human robot collaboration. IFAC-PapersOnLine 2023, 56, 1313–1318. [Google Scholar] [CrossRef]
- Sun, T.; Wang, Z.; He, C.; Yang, L. Adaptive robust admittance control of robots using duality principle-based impedance selection. Appl. Sci. 2022, 12, 12222. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Hyundai Robotics |
|---|---|
| Model | YS080 |
| DOF | 6 axes |
| Payload | 80 kg |
| Body weight | 645 kg |
| Manufacturer | ATI |
|---|---|
| Model | Omega160 IP65 |
| Rated Fx, Fy | ±2500 N |
| Rated Fz | ±6250 N |
| Rated Tx, Ty | ±400 Nm |
| Weight | 7.26 kg |
| Diameter | 165 mm |
| Height | 65.9 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-G.; Park, J.-H.; Kim, J.-C.; Hwang, J.-H.; Park, J.-W.; Park, I.-G.; Lee, H.-J.; Noh, K.; Choi, Y.-H.; Suh, J.-H. Development of a Multi-Robot System for Pier Construction. Machines 2024, 12, 385. https://doi.org/10.3390/machines12060385
Kim H-G, Park J-H, Kim J-C, Hwang J-H, Park J-W, Park I-G, Lee H-J, Noh K, Choi Y-H, Suh J-H. Development of a Multi-Robot System for Pier Construction. Machines. 2024; 12(6):385. https://doi.org/10.3390/machines12060385
Chicago/Turabian StyleKim, Hyo-Gon, Ji-Hyun Park, Jong-Chan Kim, Jeong-Hwan Hwang, Jeong-Woo Park, In-Gyu Park, Hyo-Jun Lee, Kyoungseok Noh, Young-Ho Choi, and Jin-Ho Suh. 2024. "Development of a Multi-Robot System for Pier Construction" Machines 12, no. 6: 385. https://doi.org/10.3390/machines12060385
APA StyleKim, H.-G., Park, J.-H., Kim, J.-C., Hwang, J.-H., Park, J.-W., Park, I.-G., Lee, H.-J., Noh, K., Choi, Y.-H., & Suh, J.-H. (2024). Development of a Multi-Robot System for Pier Construction. Machines, 12(6), 385. https://doi.org/10.3390/machines12060385