The most crucial component of a mechanical drive system is the gearbox. It facilitates the lowering of the torque and speed transfer from the motor shaft to the working shaft. Because of this, numerous experts are working on optimization of the gearbox. In practice, multi-objective optimization refers to optimization issues in practice that involve the simultaneous optimization of two or more objective functions. Maximizing multiple performance parameters at once, including efficiency, size, mass, and load-carrying capability, can be difficult and complex when building a gearbox utilizing multi-objective optimization. In order to solve these issues, numerous optimization approaches have been created.
Using the response surface method, H. Wang et al. conducted a multi-objective optimization research for the helical gear in a centrifugal compressor [
1]. Two specific goals were chosen for this project: the minimal gear mass and the highest gear stress. According to reports, the helical gear’s maximum stress is within permissible bounds and its mass has decreased by 27.4%. The Non-Dominated Sorting Genetic Algorithm II methodology (NSGA-II) was employed by D. Miller et al. [
2] in a multi-objective spur gear pair optimization investigation. Enhancement of gear efficiency and decrease in gear volume were this study’s goals. It was observed that a trade-off between efficiency and volume was necessary and that a lower gear module, a lower face width, greater profile shift coefficients, and a higher pinion tooth count all worked well together to achieve these goals. A mono-objective self-adaptive algorithm approach was used in [
3] to solve the optimization of tooth changes for spur and helical gears. The PSO (particle swarm optimization) method was the foundation of this strategy. Multi-objective optimization enhanced the transmission error signal’s maximal contact pressures and root mean square values. Edmund S. Maputi and Rajesh Arora [
4] used the NSGA-II and the TOPSIS (Technique for Order of Preference by Similarity to Ideal Solution) approach to solve multi-objective optimization by concurrently taking three objectives into consideration: volume, power output, and center distance. Their study’s findings can provide insight into the design of small gearboxes. In [
5], a planetary gearbox was optimized using the NSGA-II method while taking into account crucial tribological and regular mechanical restrictions. Comparing the results of single-objective optimization with and without tribological restrictions, the multi-objective optimization result demonstrated a considerable reduction in weight and power loss. In order to minimize gear weight, contact stress throughout the contact path, and optimal film thickness at the contact point, Jawaz Alam and Sumanta Panda [
6] established a strategy for spur gear set design optimization. In order to guarantee a notable decrease in weight and contact stress of a profile-modified spur gear set with sufficient film thickness at the site of contact, this work used particle swarm optimization, particle swarm optimization-based teaching–learning optimization, and Jaya algorithms. The gear design was considerably better with optimum addendum coefficient values within the design space than with conventional designs, according to the study’s findings. A unique multi-objective optimization of a two-stage spur gearbox utilizing the NSGA-II method was introduced by M. Patil et al. [
7]. Two goal functions—minimal gearbox volume and minimum gearbox power losses—were involved in this effort. Their study’s findings suggest that solutions derived from single-objective minimization had a significant likelihood of wear failure. Additionally, when utilizing multi-goal optimization as opposed to single-objective optimization, the overall power loss was cut in half. Chrystopher V.T. et al. [
8] used the MCDM method to find the ideal gear material for a gearbox in order to enhance surface fatigue and boost its wear resistance. Their study aimed to enhance surface fatigue resistance and maximize its efficiency when applied to a gearbox. In [
9], the multi-objective design of helical gear pair transmission was taken into consideration. The objective functions included gear volumes and opposing number of overlap ratio. In this study, the Parameter-Adaptive Harmony Search Algorithm (PAHS) was used to address the optimization problem. Recently, X.H. Le and N.P. Vu [
10] explored the multi-objective optimization problem of designing a two-stage helical gearbox using the Taguchi technique and grey relation analysis (GRA). Finding the optimal primary design parameters that maximize gearbox efficiency while minimizing gearbox mass was the goal of their study. This method was also used in [
11] to identify the best major design parameters for a two-stage bevel helical gearbox with the goal of maximizing gearbox efficiency and reducing gearbox volume. A multi-target optimization research for the two-stage gearbox of xEV-axle drives was carried out by M. Hofstetter et al. [
12]. Three specific goals were chosen for this work’s investigation: gearbox efficiency, packaging metric, and total expenses. Additionally, a closed loop of choosing the gearbox design parameters and then performing a gearbox analysis was included in the optimization process. The above study’s findings suggested that the benchmark solution could still be improved, particularly in light of the cost and packaging trade-off. In order to build a drive system for electric vehicles, Istenes G. and J. Polák [
13] carried out research to jointly optimize an electric motor and a gearbox. The goal of their effort was to minimize both the driving system’s weight and the overall energy waste. To highlight the additional potential of cooperative optimization, the optimization results were contrasted with earlier findings. If a drive system is optimized overall, it has been stated that increasing the gear ratio increases the system’s overall efficiency. The most effective power flow solutions for a power system, taking into account the electric market and renewable energy, more particularly, nodal prices and wind turbine placement, were presented in [
14]. The placement of wind turbines was optimized in this study to increase transmission power systems’ profits. Nevertheless, the study did not take into account the possibility of reducing power loss in the wind turbine system by improving the gearbox’s efficiency. To enhance the hypoid gears’ operational features, a multi-objective optimization technique was developed [
15]. The maximum tooth contact pressure, the minimum transmission error, the minimum gear mesh temperature, and the maximum gear pair efficiency were the four goals to be studied. The model was also solved using the NSGA-II approach. In [
16], a study on the mechanical efficiency forecasting model and energy loss for aero-engine bevel gear power transmission was presented. Based on the research findings, a novel model for predicting energy loss and mechanical efficiency was put forth, utilizing enhanced thermal elastohydrodynamic lubrication analysis and taking into account the non-Newtonian fluid effect and entrainment angle. Higher and higher degrees of aero-engine bevel gear production efficiency and design sustainability were made possible by this approach. It can offer essential access to geometric and physical evaluations that can enhance the aero-engine power transmission system’s overall energy generation, conversion, transfer, and usage.
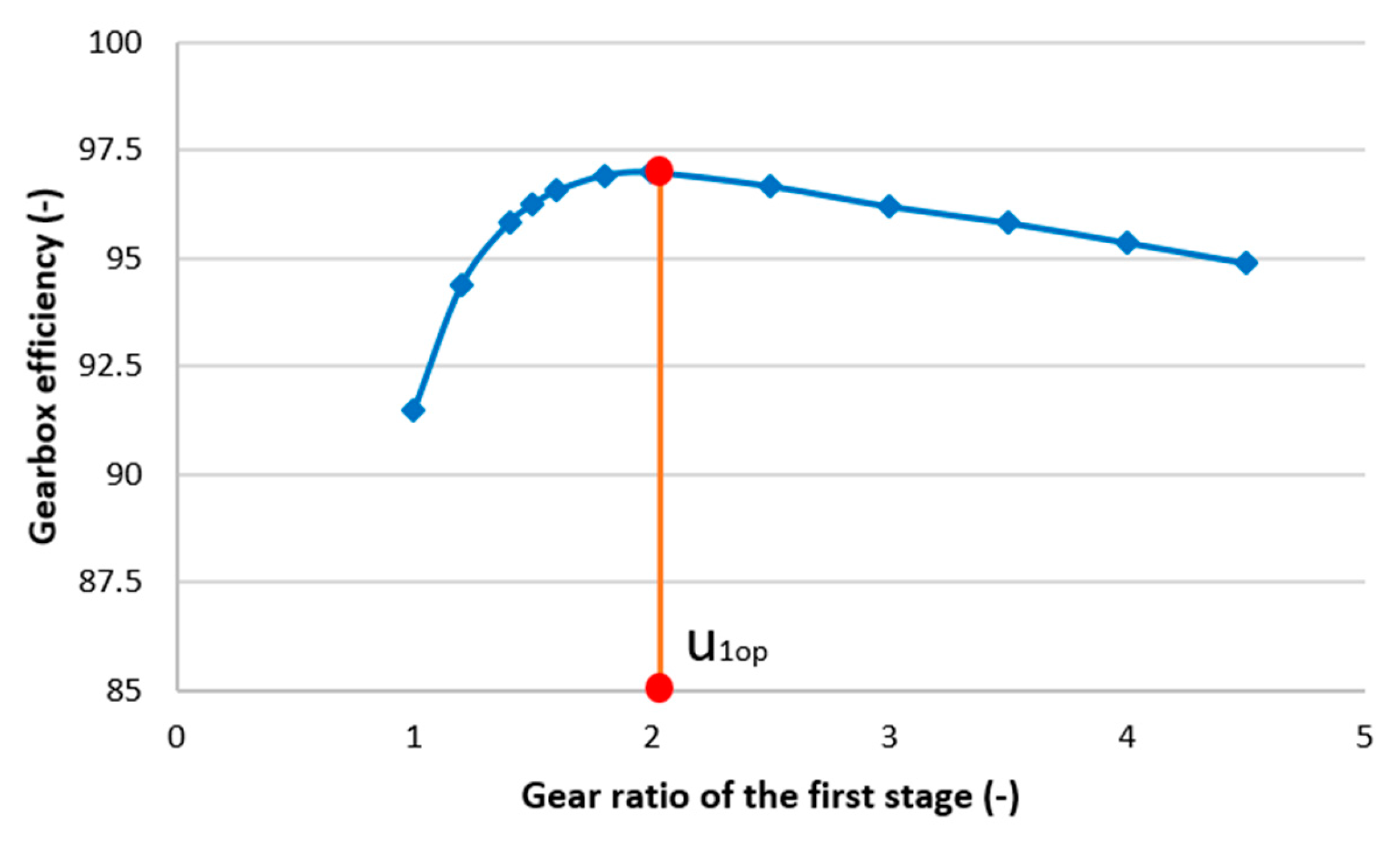
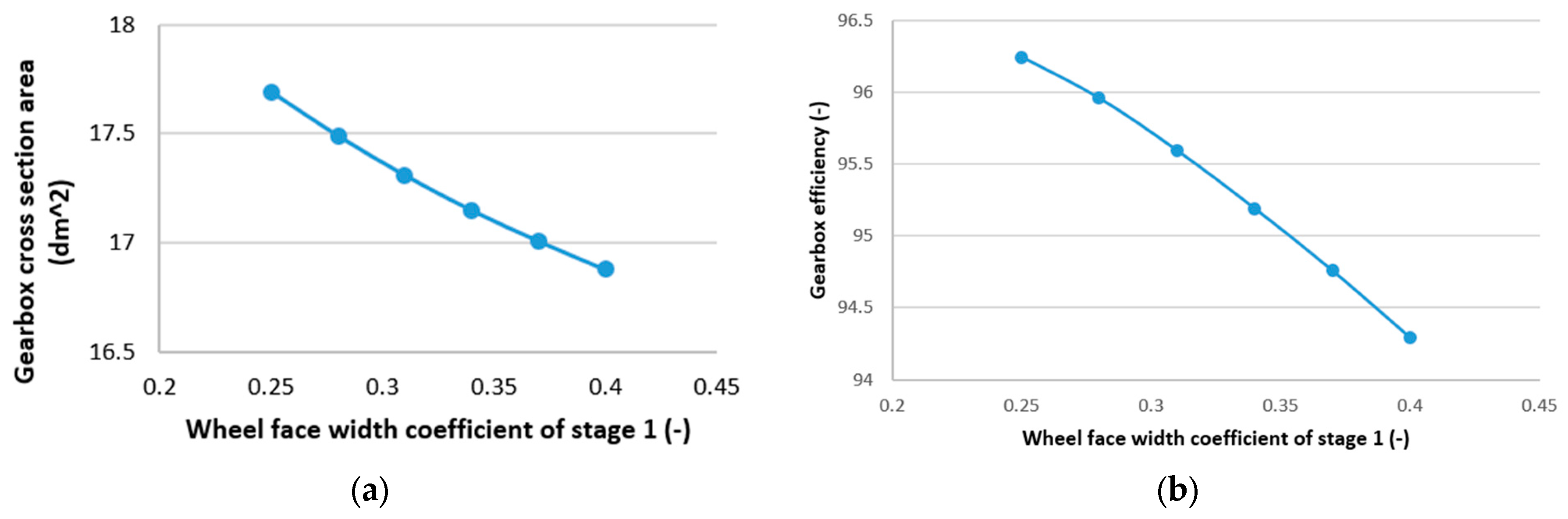
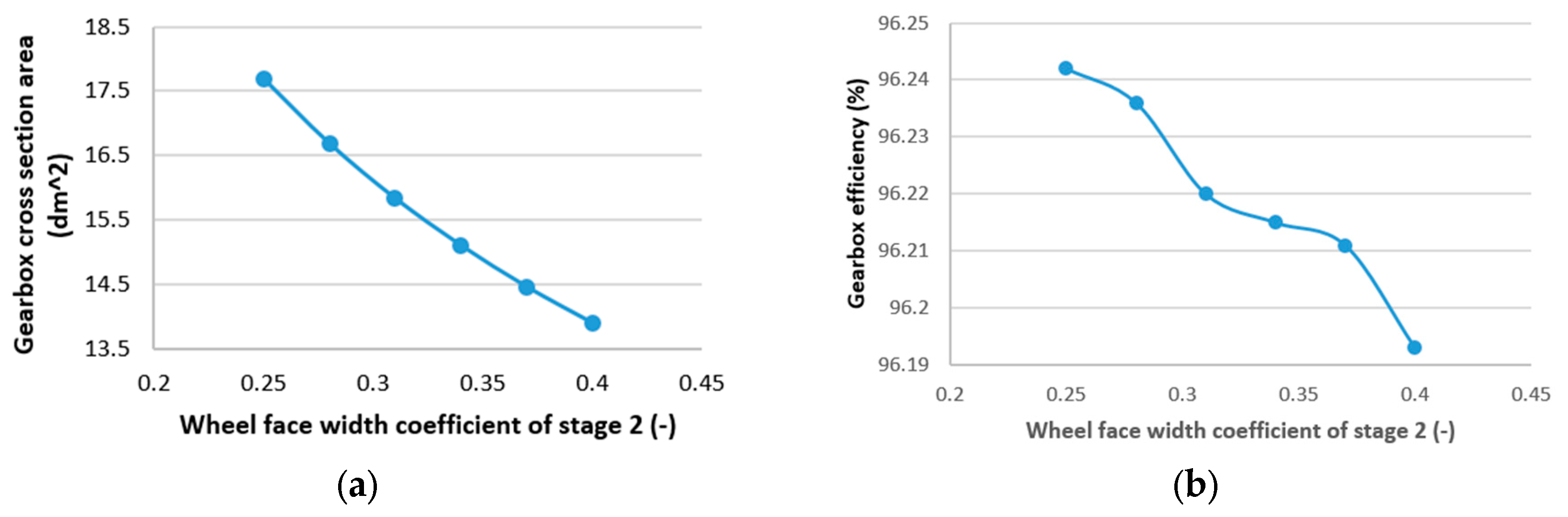
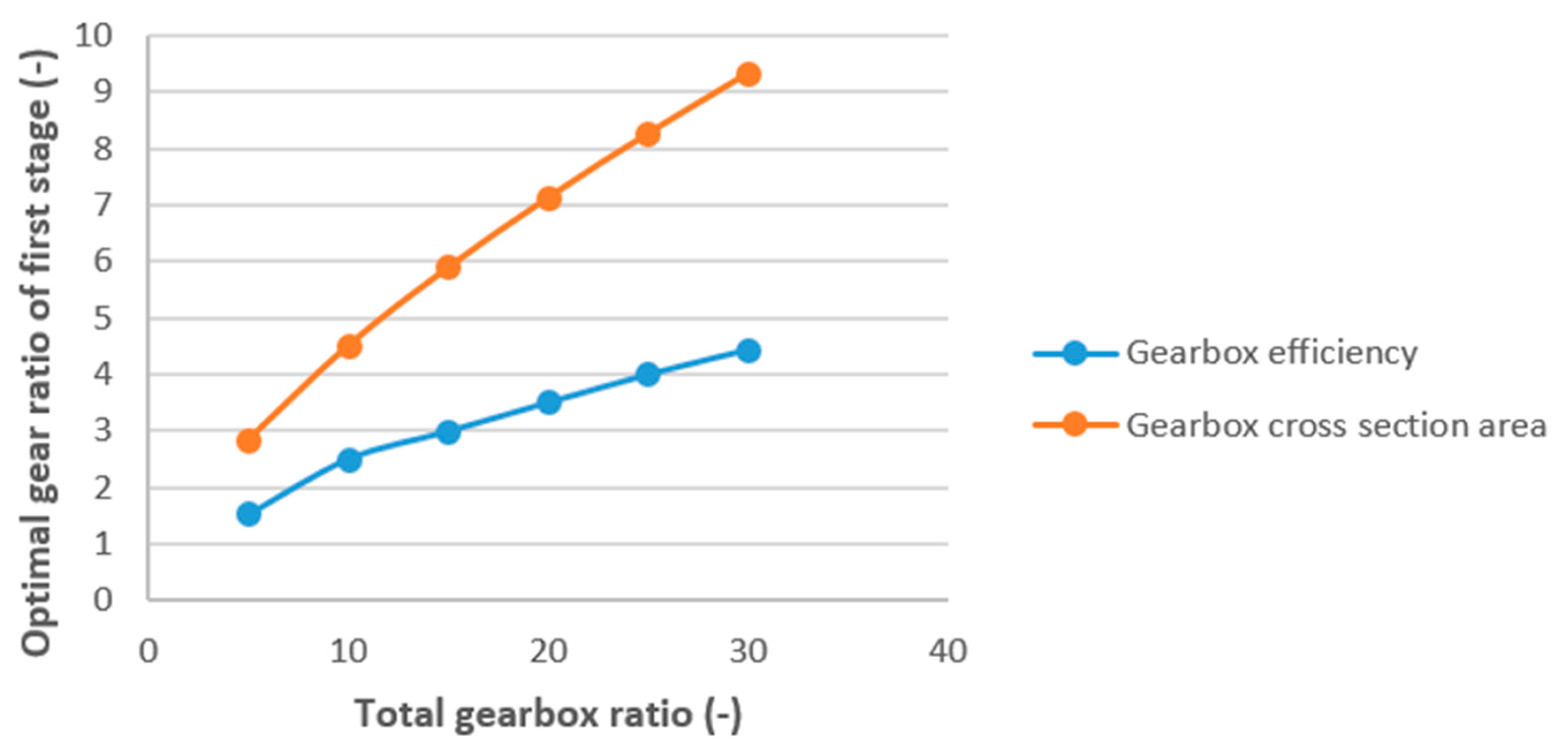
It can be found from previous studies that the best primary design parameters for helical gearboxes have not been found using the MCDM technique, despite a great deal of research on multi-objective optimization for helical gearboxes. The present study reports on a multi-objective optimization study carried out for a two-stage helical gearbox, with two particular goals in mind: increasing gearbox efficiency and minimizing the gearbox cross-section area. The three optimum main design features for the two-stage helical gearbox were examined in this study: the gear ratio of the first stage and the CWFW of both stages. Additionally, the SAW method was selected to solve the multi-objective optimization issue, and the entropy methodology was used to establish the weights of the criteria. One of the primary research conclusions recommends using an MCDM technique in conjunction with two-step problem solving to address multi-objective optimization problems as well as single- and multi-objective problems. Furthermore, the solutions to the challenge out-perform those from previous research.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}