2.1. Magnetic Vector Equation in Subdomain
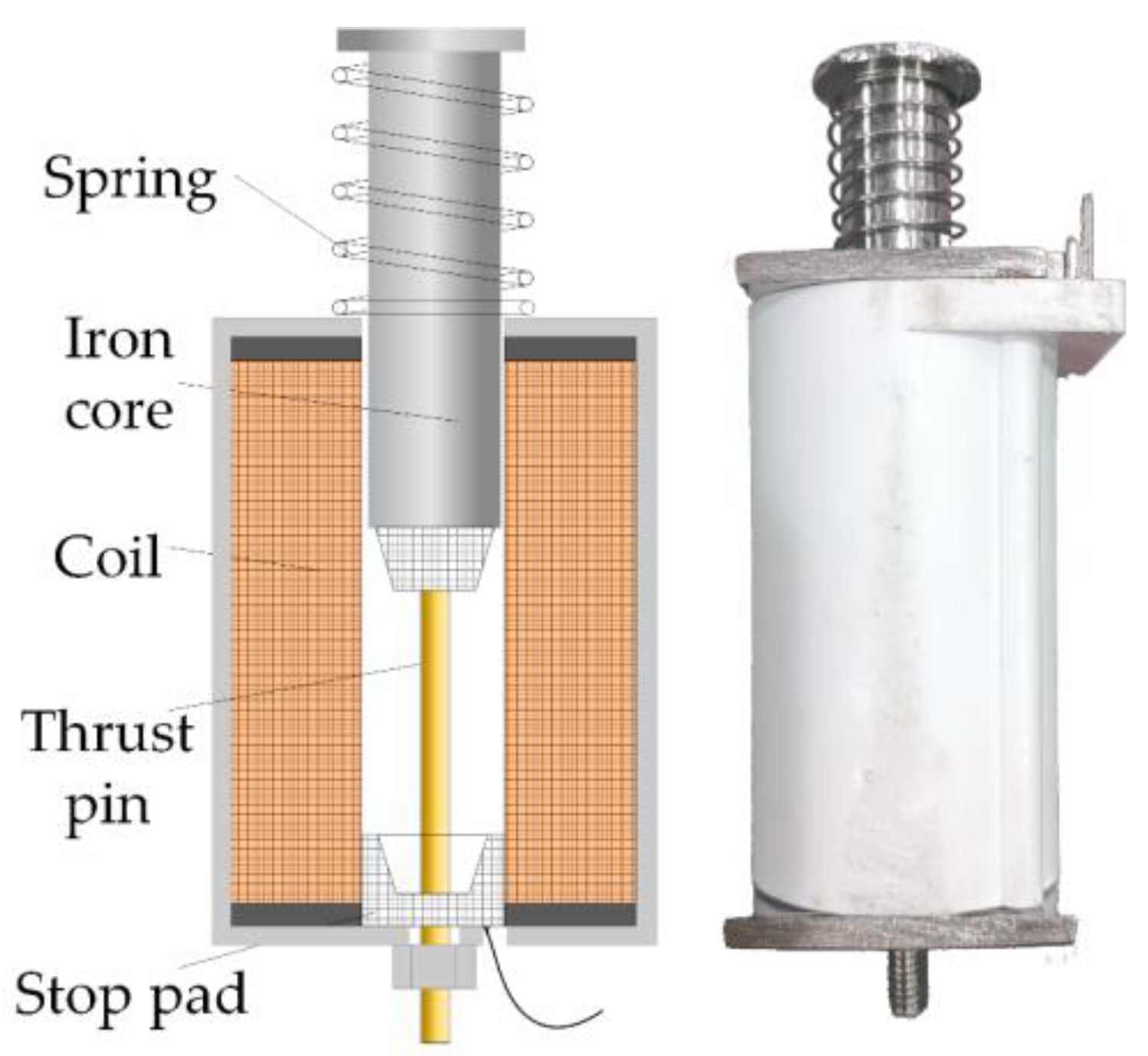
The push–pull electromagnet is a common solenoid actuator, and its mechanical structure is mainly composed of an excitation coil, a movable iron core and a spring. When there is no current in the coil, the iron core will form an extended state under the action of the spring. When a current is applied to the coil in any direction, the iron core will move to the center of the coil, thereby forming a retracted state of the electromagnet.
Figure 1 shows the structure diagram of the push–pull electromagnet without the ferromagnetic shell.
As shown in
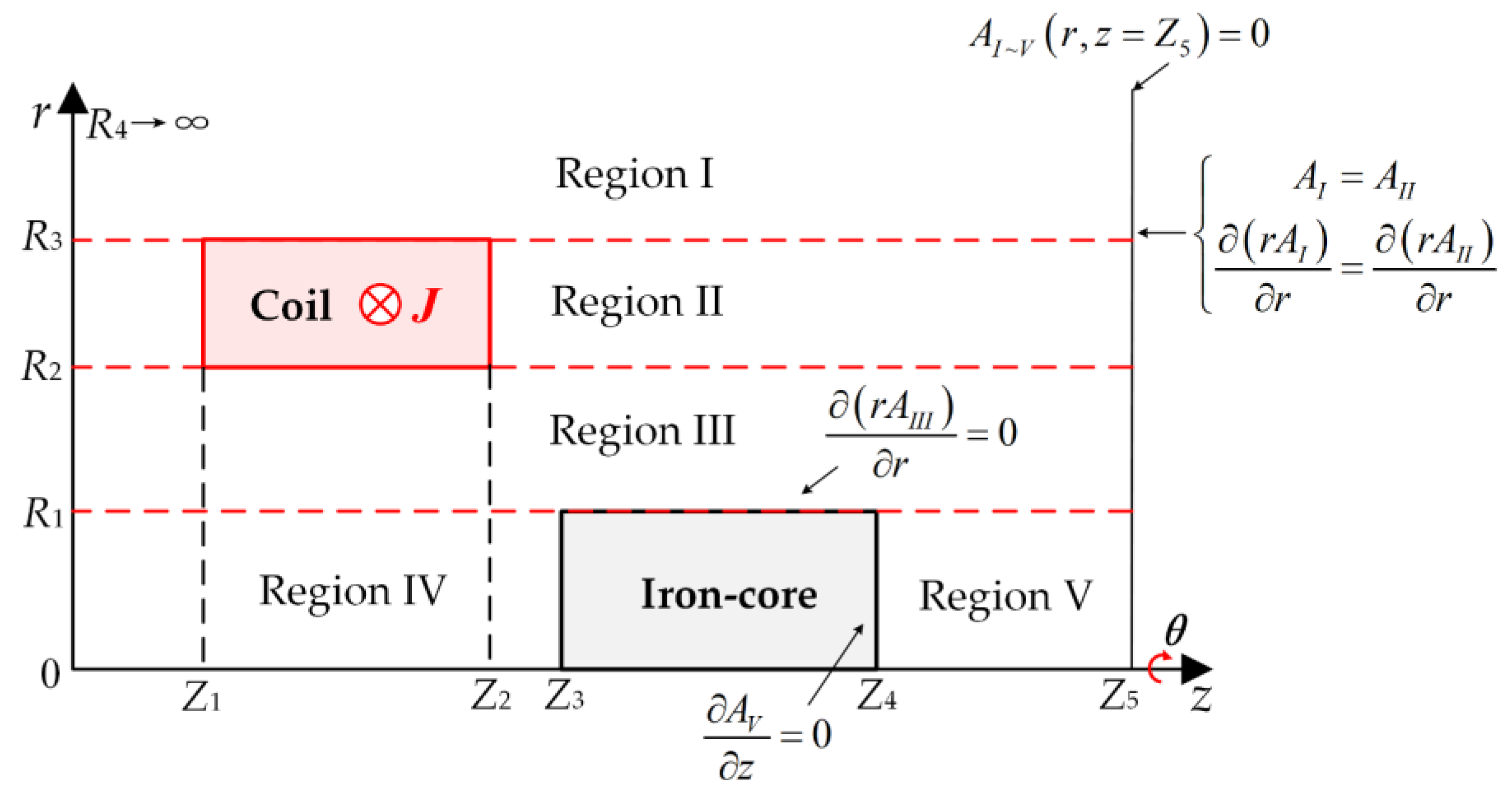
Figure 1, the ring at the top of the iron core is used to assemble the spring, the ring is always away from the center of the coil during the operation of the solenoid, and the thrust pin is made of carburized weakly magnetic stainless steel, which is assumed to have a negligible impact on the magnetic field, and therefore the iron core can be analyzed as a standard ferromagnetic cylinder. The modeling of the solenoid actuator magnetic field subdomain method assumes that the magnetic permeability of the iron core is infinite, that is, that the magnetic field lines on the iron core are all perpendicular to the surface of the iron core. In the calculation, the tangential component of the magnetic field is set at its boundary as zero. The magnetic field subdomain method modeling of the solenoid actuator and the setting of boundary conditions are shown in
Figure 2.
Since the solenoid actuator is cylindrical and the magnetic field has axial symmetry characteristics, it is suitable to use the magnetic vector potential equation in cylindrical coordinates to solve. Take the central axis of the iron core as the Z-axis and the radial direction as the R-axis. The entire solution domain is limited to three outer boundaries , and , assuming that the magnetic vector potential on the boundaries is equal to zero. For more accurate solution results, each outer boundary should be kept away from the coil and the movement area of the iron core. The five sub-domains into which the magnetic field is divided are the air region above the coil (Region I), the air region to the left and right of the coil (Region II), the air gap region between the coil and the iron core (Region III), the air region to the left of the iron core (Region IV) and the air region to the right of the iron core (Region V).
Compared to solving for a three-dimensional magnetic field using Maxwell’s equations, the magnetic field of the solenoid has rotational symmetry, and the rotation of the magnetic induction intensity only has the
component, the magnetic vector
has only the
component and its magnitude is related to the coordinates of
and
, as shown in (2). Then, the magnetic vector can be expressed as
or
.
The three components of solenoid magnetic induction intensity in the cylindrical coordinate system are [
18]
Substituting (3) into (2), it is obtained that the magnitude and potential
of the solenoid actuator satisfy
where
is the permeability in air and
is the current density in the coil. Express the current density as a function
related to
,
in order to distinguish the air regions where the current density is zero, and then distinguish the application area of Poisson equation and Laplace equation.
Solve the homogeneous differential equation using the separation of variables method. Let
and substitute it into (4) and multiply both sides by
to obtain
Assuming that
, its particular solution is
, substituting into (5) to obtain
From
and
, can know that
is not a mediocre solution and
, the above formula of (6) is a second-order constant coefficient homogeneous differential equation and the general solution satisfies
The following formula of (6) conforms to the form of a first-order imaginary Bessel function (also known as modified Bessel function), and its general solution is
where
are constants,
represents the first-order modified Bessel function and
represents the first-order modified Bessel function of the second kind.
Substitute
into (8) and
to obtain the general solution equation of the magnetic vector potential in the region I~V and then
According to the convergence and divergence of the modified Bessel function of the magnetic vector potential of the cylindrical coordinate system at the outer boundary of the magnetic field, the general solution form of the simplified magnetic vector potential of each subdomain can be obtained, respectively.
where
and
is a positive integer,
is a positive odd number and
is the magnetic permeability of air, taking
H/m. Substitute the external boundary conditions into (10) to obtain
,
.
is the zero order modified Bessel functions,
is the zero-order modified Bessel function of the second kind and
,
are the zero and first-order modified Struve functions.
,
,
,
,
,
and
are the integral coefficients of each region, determined by the interface conditions.
By further substituting the inter-domain boundary conditions into (10) to obtain
where
Note that the computation of the magnetic vector potential in each subdomain contains an infinite number of series, and in order to truncate the number of series, it is necessary to define the maximum number of harmonic terms Nmax and Kmax, whose values are larger the longer the computation will take. With the gradual convergence of the calculation results, the effect of increasing Nmax and Kmax on the calculation results will become smaller and smaller. Therefore, when setting the specific values of Nmax and Kmax, the time-consuming and calculation accuracy requirements are taken into account.
When solving, first calculate and directly by (12) and (14), and then substitute into (16)–(18) and expand the sum series into matrix form to solve , and , and finally substituting into (13) and (15) to obtain and . When all the coefficients are known, the magnetic vector potential in the whole solution domain can be obtained by substituting into (10).
2.2. Inductance Equation Based on Subdomain Method
The inductive energy storage of the solenoid actuator is distributed in the conductive medium, and its total magnetic energy formula is
where
is the inductance value with iron core,
is the current in the coil and
is the volume of the conductor.
Assuming that the current in the coil is evenly distributed on the rectangular section of the coil, the current density value is equal to the current value divided by the area of the rectangular section and the inductance value of the iron core is
where
and
is coil length,
is coil turns and
represents hypergeometric function.
From (22), it can be seen that, when the structural dimensions of the coil and the iron core are known, as long as the instantaneous position of the movable iron core and the current in the coil are known, the inductance value of the corresponding position can be obtained by the magnetic field subdomain method. In fact, when the B-H curve is not considered, the inductance value has nothing to do with the current, and the calculated inductance of the subdomain method also does not change with the current.
2.3. Electromagnetic Characteristics Analysis of the Push–Pull Electromagnet
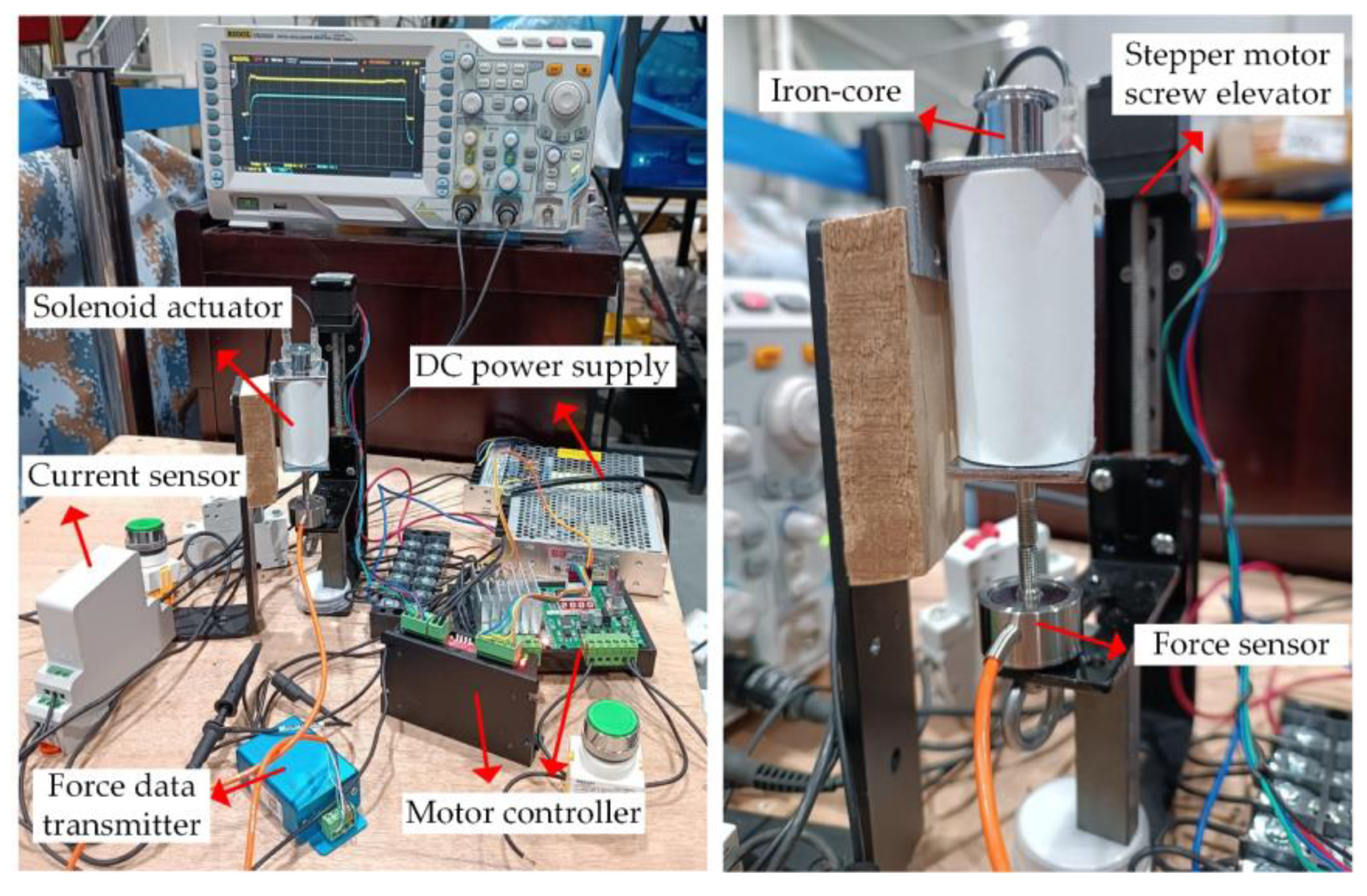
In order to verify the accuracy of the inductance calculation, an ANSYS EM 19.1 simulation model was built according to the structural parameters of the push–pull electromagnet in
Figure 1, and wrote a MATLAB numerical calculation program. The parameters are shown in
Table 1.
The dimensional parameters in
Table 1 were measured by vernier calipers after disassembling the electromagnetic actuator shown in
Figure 1. The number of turns of the coil
N is provided by the manufacturer, and the excitation current
I is the maximum allowable current calculated from the rated operating conditions of the electromagnetic actuator. The boundary condition
Z5 and the number of harmonic terms
Nmax and
Kmax were defined to obtain the results, and these values have been obtained to be large enough, as further increasing these values will have little effect on the simulation results of the subdomain method and FEM.
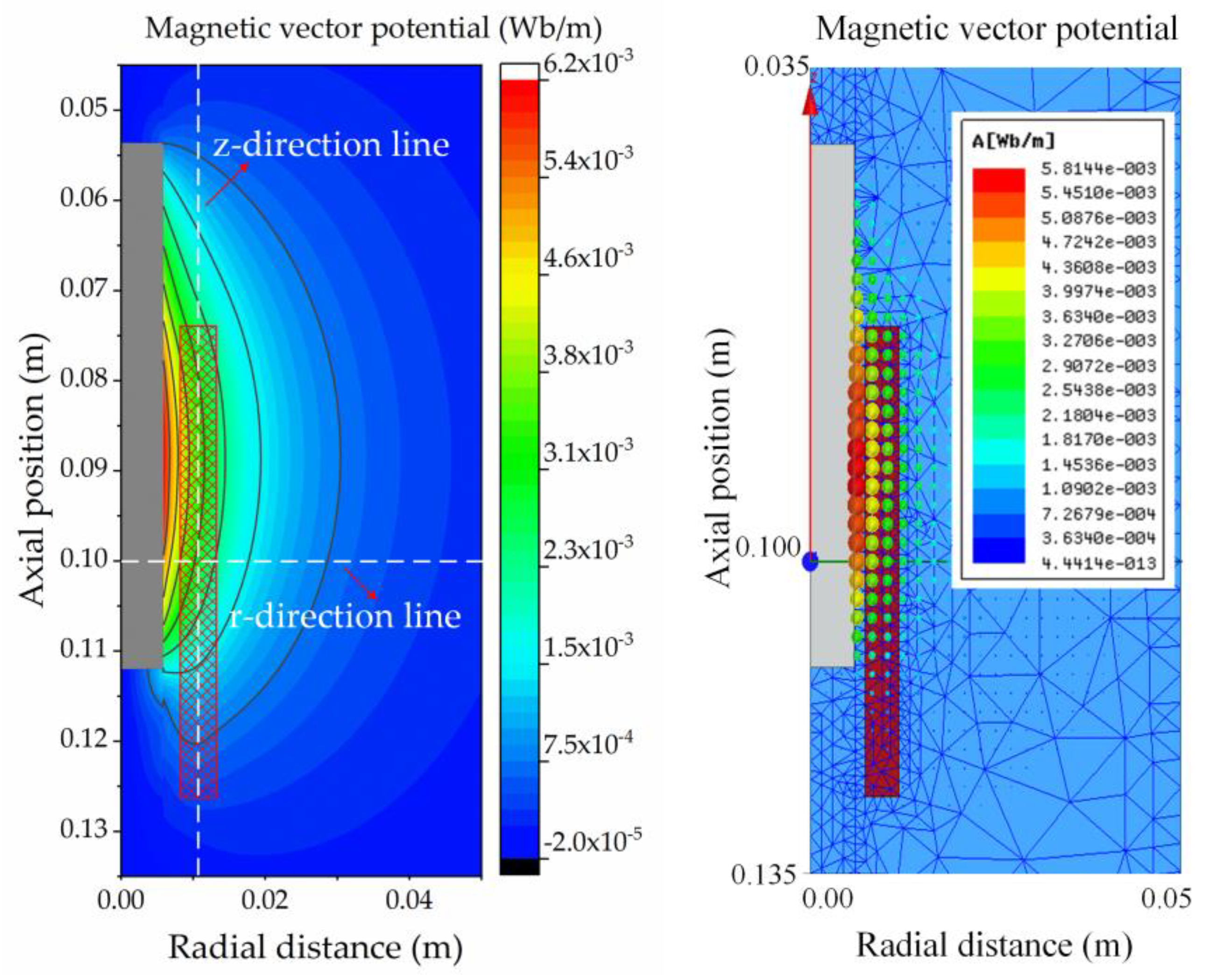
When the excitation current in the coil is given to be 7.24 A, the magnetic vector potential distribution plot calculated by the subdomain method is compared with the FEM results, as shown in
Figure 3, where only the data of 0.035 m to 0.135 m in the 0.2 m axial computational domain are shown for easy observation, where the permeability of the iron core material in the FEM is set to electrical iron (DT4, a standard steel in China).
The peak magnetic vector potential data in
Figure 3 are 6.16 × 10
−3 Wb/m and 5.81 × 10
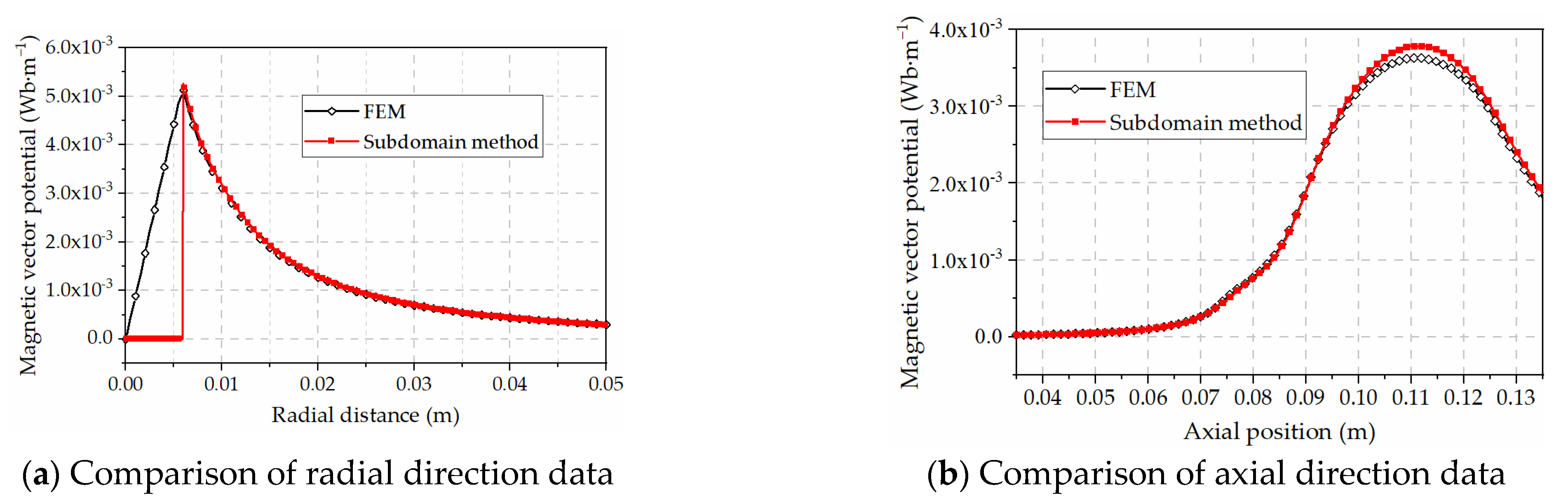
−3 Wb/m, respectively, with a difference of about 5.9%. However, it is difficult to obtain a valid global data comparison by the naked eye with this color representation. Therefore, we take the data comparison on the picture on two lines; one is in the r-direction pointing from the center of the coil to the radial boundary as shown in
Figure 4a, and the other is in the z-direction in the middle of the inner and outer diameters of the coil, as shown in
Figure 4b.
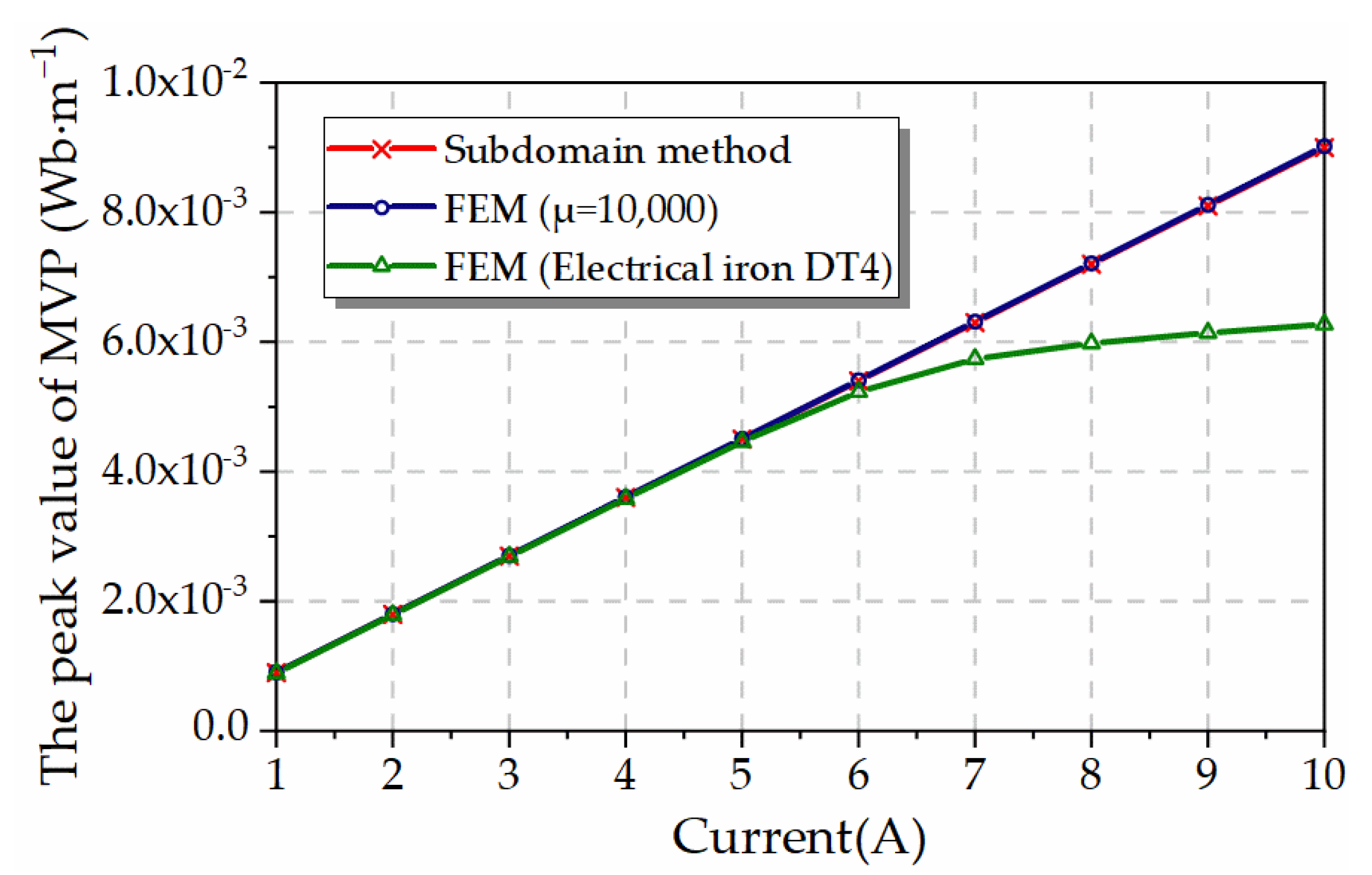
In fact, the size of the excitation current is necessarily related to the degree of magnetic saturation. In order to specifically analyze the accuracy of the calculation of the magnetic vector potential, different sizes of the excitation current are applied to the coil, while a set of magnetic permeability of a constant value of 10,000 is added to the FEM, and the results of the comparison of the peak vector potential are shown in
Figure 5.
As can be seen in
Figure 5, with the increase in current, the peak magnetic vector potentials calculated by the subdomain method and the magnetic permeability set to 10,000 in the FEM are basically equal, which indicates that the calculation results of the subdomain method are very approximately equal to the case of the magnetic core permeability set to a large amount in the FEM. When the core material in the FEM is electrician’s soft iron (DT4), the calculation result is not increased linearly, but increased according to the trend of the
B-H curve, which indicates that, with the gradual magnetic saturation of the iron core, the error of the calculation result of the sub-domain method is increased. In order to avoid overheating damage, the solenoid actuator usually does not pass a large current, so in general the results of the subdomain method can be adopted.
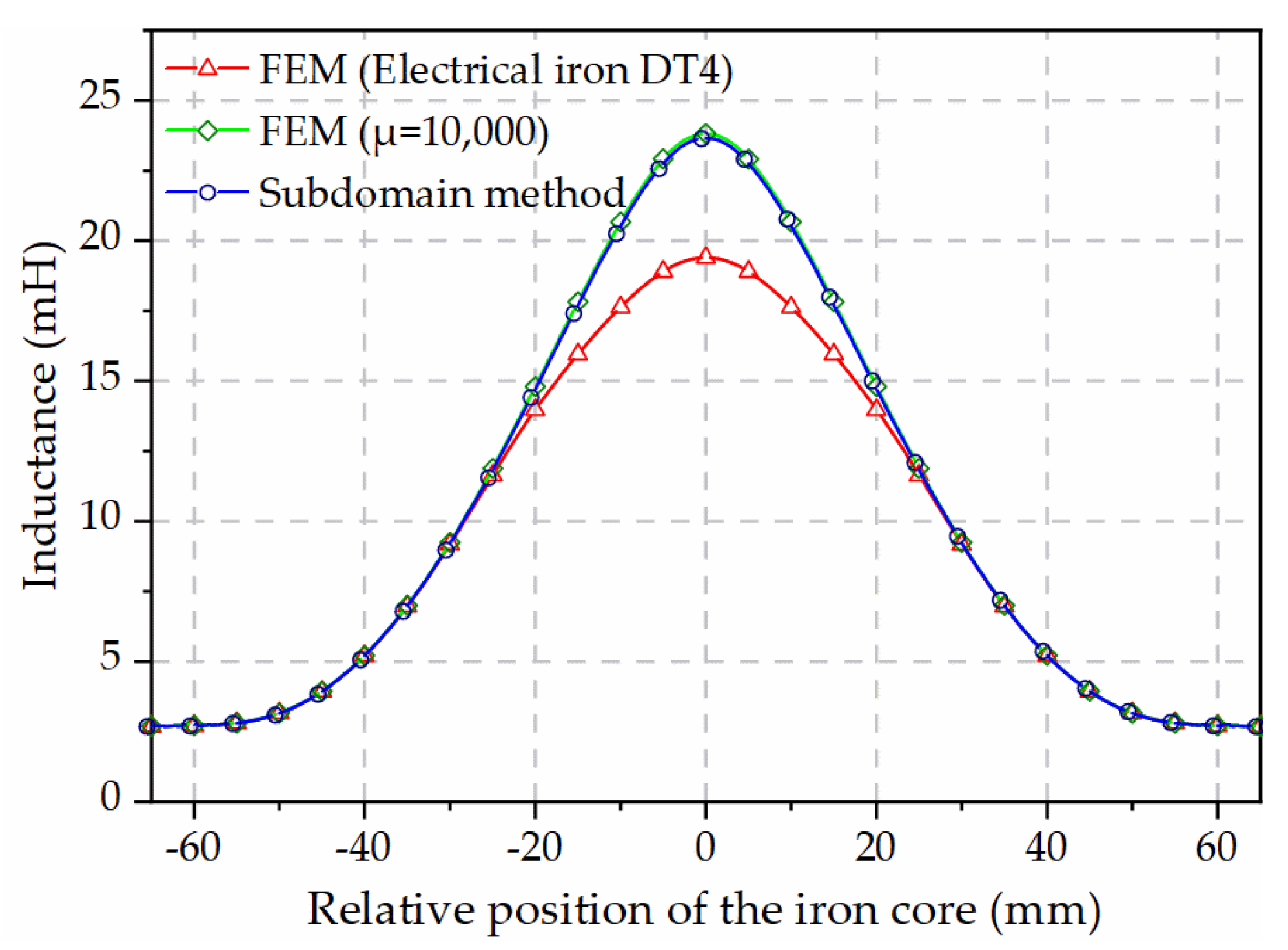
The comparison of the inductance curves of the movable iron core at different axial positions relative to the center of the coil is shown in
Figure 6, and a data point is taken every 0.5 mm. Among them, the magnetic permeability of the iron core in the finite element is calculated according to the constant value of 10,000 and the
B-H curve of electrical iron (DT4) [
5].
It can be seen from
Figure 6 that the inductance calculated by the subdomain method is basically the same as the result when the relative magnetic permeability in the FEM is 10,000, which shows that the calculation of subdomain method is accurate when the iron core has high magnetic permeability and does not consider magnetic saturation. When the core is calculated according to the
B-H curve of the electrical iron (DT4), the closer the relative position of the iron core and the coil is, the greater the difference in the calculated inductance, which means that, when the iron core and the coil are in these relative positions, the 7.24 A current excitation has caused the magnetic core to create a slight magnetic saturation.
After the inductance curve is obtained, the EMF on the iron core can be calculated through the change in the inductance gradient. Use the virtual displacement method to solve the kinematic process. The EM energy of the system is [
14]
where
is the magnetic induction energy,
is the inductance value related to the position of the movable iron core,
is the excitation current of the coil and the EMF that the iron core receives in the axial direction of the coil is [
15]
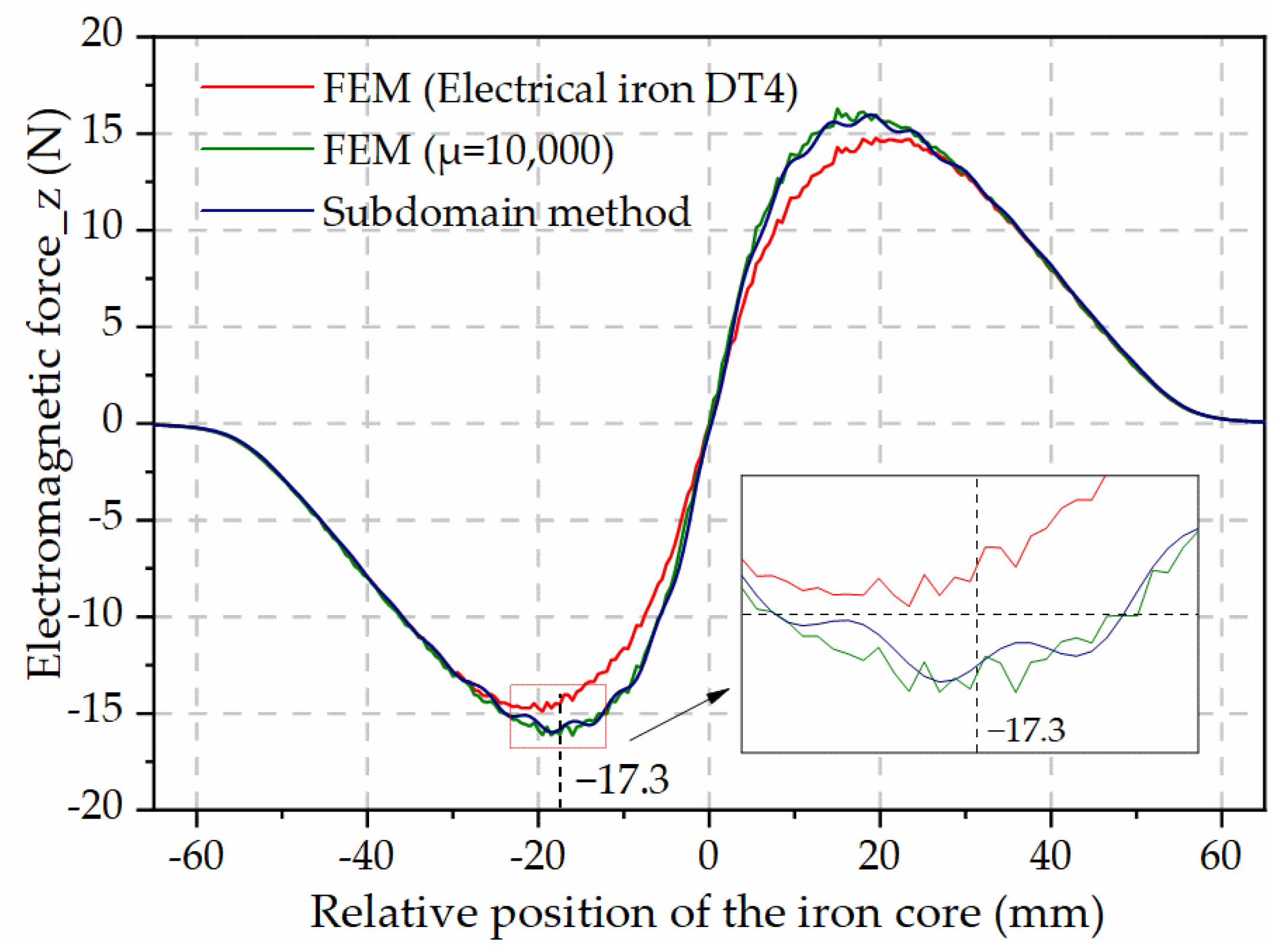
The EMF comparison of the movable iron core at different axial positions relative to the coil is shown in
Figure 7.
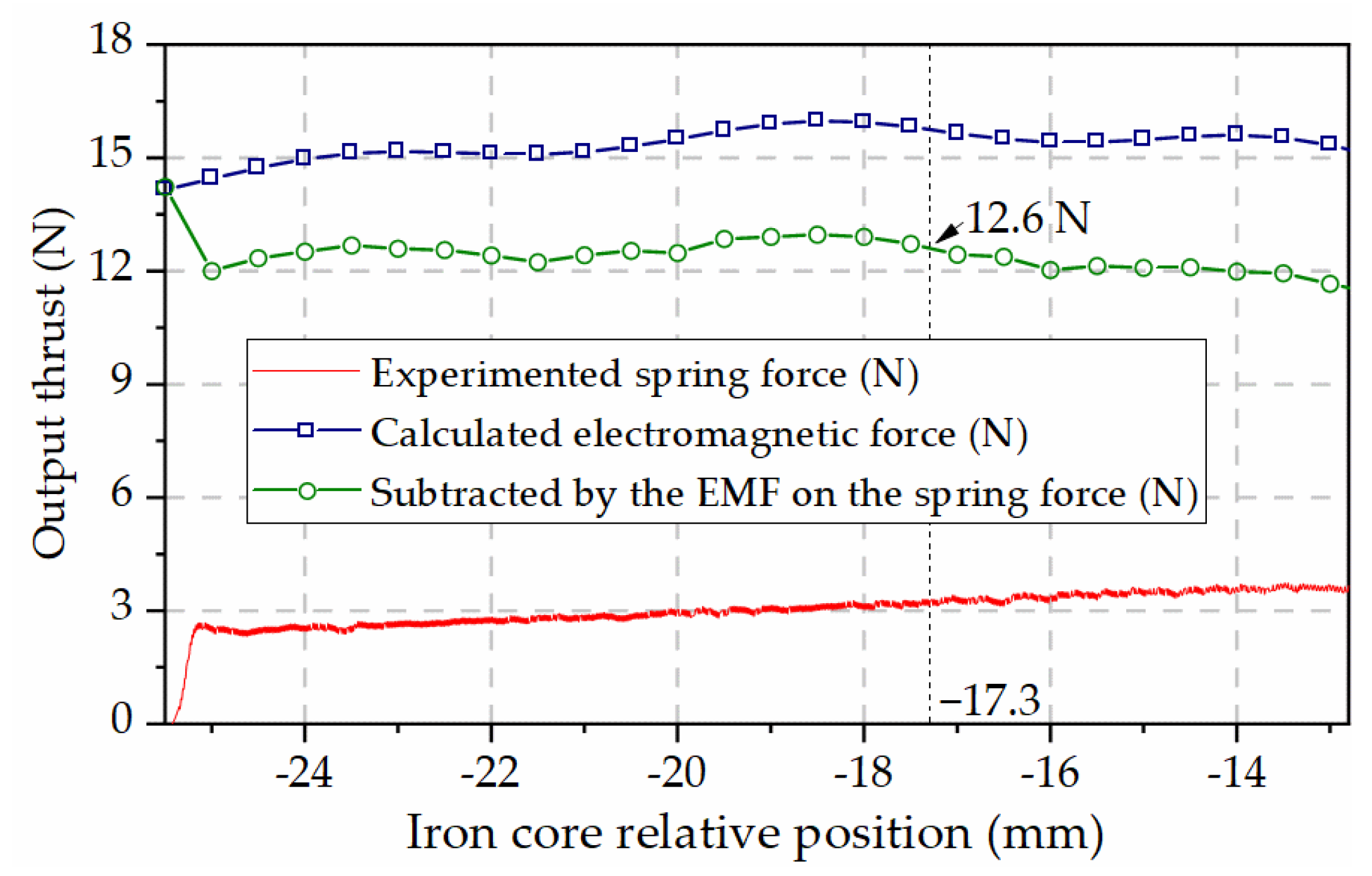
When the coil is energized, the direction of EMF on the iron core always points to the center of the coil. As the electromagnet shown in
Figure 1, take the point where the center of the coil and the iron core coincide as the coordinate origin. Defining the EMF in the upward direction as positive, the iron core is subjected to a downward negative force when it is located above the coil, and a positive force if the iron core is located below the coil. As can be seen from the enlarged diagram in
Figure 7, the EMF obtained by the FEM is irregularly jagged, which is due to the finite difference calculation, while the EMF calculated by the subdomain method is wavy, which is due to the limitation of the number of harmonic terms.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}