Abstract
Human–robot collaboration stands as one of the research frontiers in industrial applications due to the possibility for human operators to be supported by robots in carrying out their tasks in a shared workspace. However, advances in this field can be slowed down by the lack of standards regarding the safety and ergonomics of such applications. This article aims at reducing this gap by presenting an adaptation of the standard ISO 11228-3 for the ergonomic evaluation of hand-guiding applications through the OCRA index. This innovative methodology is innovatively applied to a drilling application in which a human operator hand-guides a collaborative robotic system consisting of a Franka Emika Panda robot, a force/torque sensor and an IMU suit to track the motion of the operator’s body. The SaRAH app, a MATLAB 2020a-based software tool developed on purpose, implements the ergonomic assessment procedure, allowing the proper redesign of the working shift (offline mode) or providing the worker suggestions to improve his/her behavior (online mode) so as to reduce the ergonomic risk.
1. Introduction
Human–robot collaboration (HRC) is nowadays a well-established trend in industrial robotics, questioning the traditional paradigm of separation between human and robot workspace [1]. Research about human–robot workspace sharing and physical interaction started in the early 2000s and has risen increasingly until today [2,3]. Likewise, HRC has been envisaged as one of the drivers of the 4.0 transition [4], on the one hand making light automation affordable for small and medium enterprises, while on the other enabling the flexibility required by current market trends [5]. Looking at the market share, the rate of collaborative versus traditional robot units sold has increased since 2017, reaching up to eight percent in 2021 (source: International Federation of Robotics) [6].
In future trends, worker wellbeing will definitely play an increasingly central role, as per the Industry 5.0 paradigm, in several respects [7]. Among these, safety and ergonomics deserve great attention as potential barriers towards robot implementation [8,9]. Nevertheless, collaborative robots are intrinsically safer due to the lightweight, smooth surfaces—in some cases, even padded—and the safety-related functions [6]. However, workspace sharing considerably increases the complexity of analyzing and designing the tasks, and this holds true from the perspective of ensuring safety [10]. Indeed, as per ISO TS 15066 [11], which is the reference standardization deliverable released up to now, HRC safety assessment processes require step-by-step analyses of the whole task to check the possibility of occurrence of any hazard. This means dealing with a high number of variables to consider all the possible risk scenarios. Consequently, risk mitigation, verification and monitoring methods become even more crucial [12]. And, in the last years, the research efforts in this direction have been increasing considerably, with safety-related studies aiming either at avoiding or mitigating contact and ergonomics-oriented ones dealing with both physical and cognitive/organizational aspects [13].
There are several human–robot collaboration modalities according to [11], depending on whether or not contact is allowed between the robot and humans and depending on the strategy to avoid risks for the operators, thus definitely affecting safety-related aspects. Avoiding impacts between humans and robots is typical of the collaborative modes of safety-rated monitored stop (the robot stops if a human accesses a pre-defined safeguarded area) and speed and separation monitoring (the robot slows down depending on the distance from the human, ensuring adequate stopping time in any configuration). To ensure safety, the constant monitoring of the workspace is necessary and commonly achieved by implementing safety-related sensors—i.e., laser scanners—or other acquisition systems, such as 3D cameras, stereovision systems, ultrasonic sensors, infrared sensors and thermal cameras. All those measures can be complemented by providing wearable sensors for the targeted monitoring of the operator [14]. In the power and force-limiting operating mode a contact is rare but acceptable, but it must be guaranteed that it will not hurt the operator in any way, so the issue of human–robot contact must be properly addressed; the well-established approach is test-based and relies on the reproduction of the contact situation, replacing the human body part with so-called “biofidelic” sensors and reproducing the characteristics of the human body [15]. In hand-guiding (HG) mode, the robot moves according to human inputs; thus, it is worth considering ergonomics as more crucial than safety—strictly intended here as the prevention or mitigation of accidents. Ergonomics aims, on the other hand, at reducing the risk of musculoskeletal disorders (MSDs); according to the European Agency for Health and Safety at Work [16], roughly three out of every five workers complain about an MSD. In particular, the majority of those dealing with repetitive hand or arm movements are considered to be exposed to physical risk factors for at least a quarter of the working time [16].
Besides the necessity of minimizing the occurrence of work-related diseases, considering human factors in process design is also crucial for improving the quality of operation performance [17]. In relation to this, it is worth observing that, while technologies advance quickly, legislation and standardization are characterized by slower processes [12] and, in witness thereof, there is a lack of standards dealing with ergonomics in robotic operations. A comprehensive overview of the standards generically dealing with ergonomics can be found in [18]; among those, the ISO 11228 series deals with manual handling, providing recommendations for designers, employers, workers and other subjects involved in the design of tasks. ISO 11228-1 [19] deals with the manual lifting and transportation of low-weight loads, considering operator postures and motion frequency and characteristics. ISO 11228-2 [20] provides guidance for the assessment of the risks related to pulling and pushing activities, identifying the maximum permissible static strength as a function of age, gender and stature. ISO 11228-3 [21] applies to risk assessment of activities characterized by reiterated movements of the upper limbs; among the approaches described in this standard for the estimation of the risk factors affecting upper limbs, the Occupational Repetitive Action (OCRA) assessment methodology of biomechanical overloading is the most comprehensive method [22]. Such a protocol also considers action frequency, postures, applied force, duration of rest breaks, repetitiveness and recovery time during a working shift. It requires experience in risk index calculation but can accurately provide a prevision of the risk of disorder occurrence generated by biomechanical overload, enabling the redesign of the activity according to ergonomics criteria. Moreover, the same ergonomics evaluation can be implemented in real-time and provide online feedback to the workers who reach excessive physical overloads.
The ergonomics-related issues occurring when humans and robots interact to accomplish tasks (such as back or upper-limb pain due to the handling of heavy loads or incorrect postures and stress due to the repetitiveness or needed precision of tasks) are extensively disclosed in [23]. The paper analyzes the approaches for both physical and cognitive ergonomics assessments, presenting all the published approaches for ergonomics monitoring. The “standards-based” approaches to mitigating ergonomics-related workload in human–robot collaboration mainly rely on the following methodologies:
- REBA (rapid entire body assessment): Initially proposed in [24], it is based on scoring (i) the postures of different groups of body parts, (ii) the load, (iii) the coupling factors and (iv) the activity. The scores are then combined to obtain the degree of risk by consulting a decision table. The approaches relying on this methodology may lead to modifications of robot pose and action sequence [25], may indicate the more appropriate body configuration [26] or may support task allocation [27].
- RULA (rapid upper limb assessment): introduced in [28], it consists of evaluating body posture, force and repetition, considering neck, trunk and upper extremities. Approaches based on this methodology rely on the adjustments of robot motions to comply with human poses [29,30] or can be used to predict the physical risk.
- The WISHA (Washington Industrial Safety and Health Act) index, which is, in turn, derived from the NIOSH (National Institute for Occupational Safety and Health) equations [31]. An approach building on this methodology enables the adaption of online robot motion planning to cope with human ergonomics [32].
It is worth observing that no OCRA-based approaches have been presented so far for the automated offline or online analysis of HRC tasks, even if the OCRA index stands as the more efficient and complete methodology to analyze workstations and even if compared to the RULA method [33]. The latter, indeed, does not consider other features of the activity, such as the working shift duration and the recovery time. In line with these considerations, OCRA developers stress that this methodology was the one preferred by the ISO working group, based on a consensus among a variety of technical experts [34]. On the other hand, none of the aforementioned studies specifically target HG operations. Actually, only a few studies analyze the safety- and ergonomics-related aspects of HG applications: in [35], an ergonomics validation protocol is presented and tested in an automotive assembly scenario, while in [36] the risk assessment of HG-based assemblies in an analogous application is addressed.
The work presented here, framed within a European research project aimed at closing the gaps between technological advancements and standardization and supporting users in the implementation of HRC applications [37], concerns the automated evaluation of physical ergonomics by means of a software tool developed on purpose for HG applications, enabling the automated offline and online evaluation of a modified version of the OCRA index in a given task.
The approach of the present work relies on the OCRA index computation by means of the “SaRAH” (Safety in Robot Arm Hand-Guidance) MATLAB® app, which was developed on purpose. While previous works mainly target sequential collaborative assemblies and co-manipulation tasks, the app targets in particular HG collaborative applications, in which the robot supports the operator in a repetitive, dull and stressful task. The forces exerted by the user to perform the task are measured with a six-axis force/torque sensor, and the pose of the limbs of the human body is tracked with a wearable suit of Inertial Measurement Units (IMUs). IMUs are particularly suitable for risk assessment in unstructured environments, such as industry settings, due to their high flexibility, portability, low dimension, low power consumption and high usability. The usage of IMU systems in ergonomics is relatively recent, as reported by a review paper [38] identifying a few works based on IMUs for ergonomics analysis, with most of them relying on the application of ISO 11228. One of those in particular concerns the OCRA estimation, but it is limited to the posture multiplier [39]. The described approach enabled by the SaRAH app was tested in a real-world application example by one of the researchers participating in the study in order to prove the overall effectiveness.
The paper is organized as follows. In Section 2, the OCRA-based methodology for ergonomics assessment is detailed and the SaRAH app is presented. In Section 3, the HG workcell, the acquisition setup and some application examples are reported. Section 4 and Section 5, respectively, report on the Discussion and Conclusion.
2. Material and Methods
2.1. Ergonomics Assessment
The OCRA index represents a compact index of exposure to repeated movements of the upper limbs and derives from physiological, biomechanical and epidemiological principles. The computation of the index is based on the concept of Technical Actions (TAs), i.e., the elementary manual operations into which the working task is subdivided (e.g., pushing, cutting, etc.). The OCRA index is defined as the ratio between the number of actions actually performed with the upper limbs in cyclical tasks and the corresponding number of recommended actions, calculated on the basis of a fixed benchmark—30 actions per minute, according to [21]—considered representative of optimal conditions. In case of more burdensome conditions (e.g., due to excessive strength, wrong posture, insufficient recovery periods or other complementary factors), the latter undergoes a decrease through appropriate corrective coefficients.
As per [21], the OCRA index is calculated as:
is the number of actual technical actions performed during the shift, computed as
with , and corresponding to the number of technical actions per cycle, the cycle time, the frequency of technical actions and the net duration of the repetitive task in a shift, respectively., instead, represents the number of reference technical actions (RTA) for each upper limb, computed as
with actions per minute, and , representing the force multiplier (quantifying the effort of the operator), the posture multiplier (considering incorrect postures), the repetitiveness multiplier (considering if the same technical action is repeated for most of the cycle time), the additional multiplier (considering other factors such as vibrations or the need for precision), the recovery multiplier (considering the presence of breaks) and the duration multiplier (considering which portion of the total working shift involves repetitive actions), respectively.
The terms involved in the calculation can be subdivided into the categories hereafter reported.
- Force information : According to [21], it can be estimated in three different ways: (a) through an EMG sensor by the percentage of muscle activation compared to the maximum contraction, (b) by the percentage of a basis force provided for relevant poses in the standard EN 1005-3 [40] or (c) more qualitatively, based on the amount of effort perceived by operators during a testing campaign.
- Posture information : This is determined based on the percentage of time on which shoulder, elbow and wrist joint angles exceed specific angle limits, as defined in [21].
- Task frequency and characteristic information , , , , , , : These parameters enable the consideration of factors which make the shift more fatiguing for the worker.
The multipliers belonging to the latter category can be determined based on the instructions provided in [21] once the details of the working shifts are known, while more details are necessary to obtain the values of the posture and force multipliers.
In the methodology proposed in this paper, the posture multiplier is based on the pose of the limbs of the human body, which is continuously tracked through the mentioned IMU system. In particular, our previous work [41] regarded the procedures that were implemented to guarantee a correct tracking of the human body with the suit. The model of human upper limbs used for the calculation, commonly used in biomechanical studies, is characterized by seven degrees of freedom. In greater detail, the shoulder is modeled by three revolute joints simulating abduction/adduction, internal rotation and flexion/extension. In the elbow, two rotational DoFs are considered: flexion/extension and forearm pronation/supination. The wrist is represented by two revolute joints, identifying palmar flexion/extension and ulnar/radial deviation. The distance between each joint, namely the body segment length, is estimated through the Drillis and Contini model [42], which estimates the length of each body segment based on the height of the subject. The use of a simplified biomechanical model eases the estimation of the joint angles to be compared with the limit values. The posture multiplier can then be obtained considering the portion of cycle time in which inappropriate postures (i.e., postures that violate the limits on maximum/minimum joint angles) occur.
As for the computation of the force multiplier, among the three possible approaches mentioned before to compute this multiplier, the first one (using EMG) and the third one (through the perception of the user) were discarded: the first one because EMG sensors are invasive and not suitable for industrial settings and the third one as it is not appropriate to obtain objective and trustworthy estimations. The approach using the percentage of the “basis forces” was instead selected, but a modification had to be introduced. In fact, the basis forces provided in [40] are relative to static poses, while in the described hand-guided collaboration scenario the subject constantly changes his/her posture. Then, using the previously mentioned seven-degree-of-freedom model of the arm, the basis forces are mapped to “basis torques” in the shoulder, elbow and wrist joints using the Newton–Euler recursive algorithm, as in [43]. Afterwards, the same Newton–Euler procedure is applied again starting from the measurement of the force/torque sensor instead of the basis forces from the standards and considering the arm joint positions according to the measurements of the IMU system. In this way, the torques that the joints of the human arm need to apply are calculated. Finally, these torques are compared to the basis torques to obtain the force multiplier.
From the calculation of the previous values, the obtained overall OCRA index can belong to three different “regions” of ergonomical risk [21]:
- No risk (green zone), with values lower than 2.2.
- Very low risk (yellow zone), with values in the range 2.2–3.5.
- Risk (red zone), with values higher than 3.5.
2.2. The SaRAH App
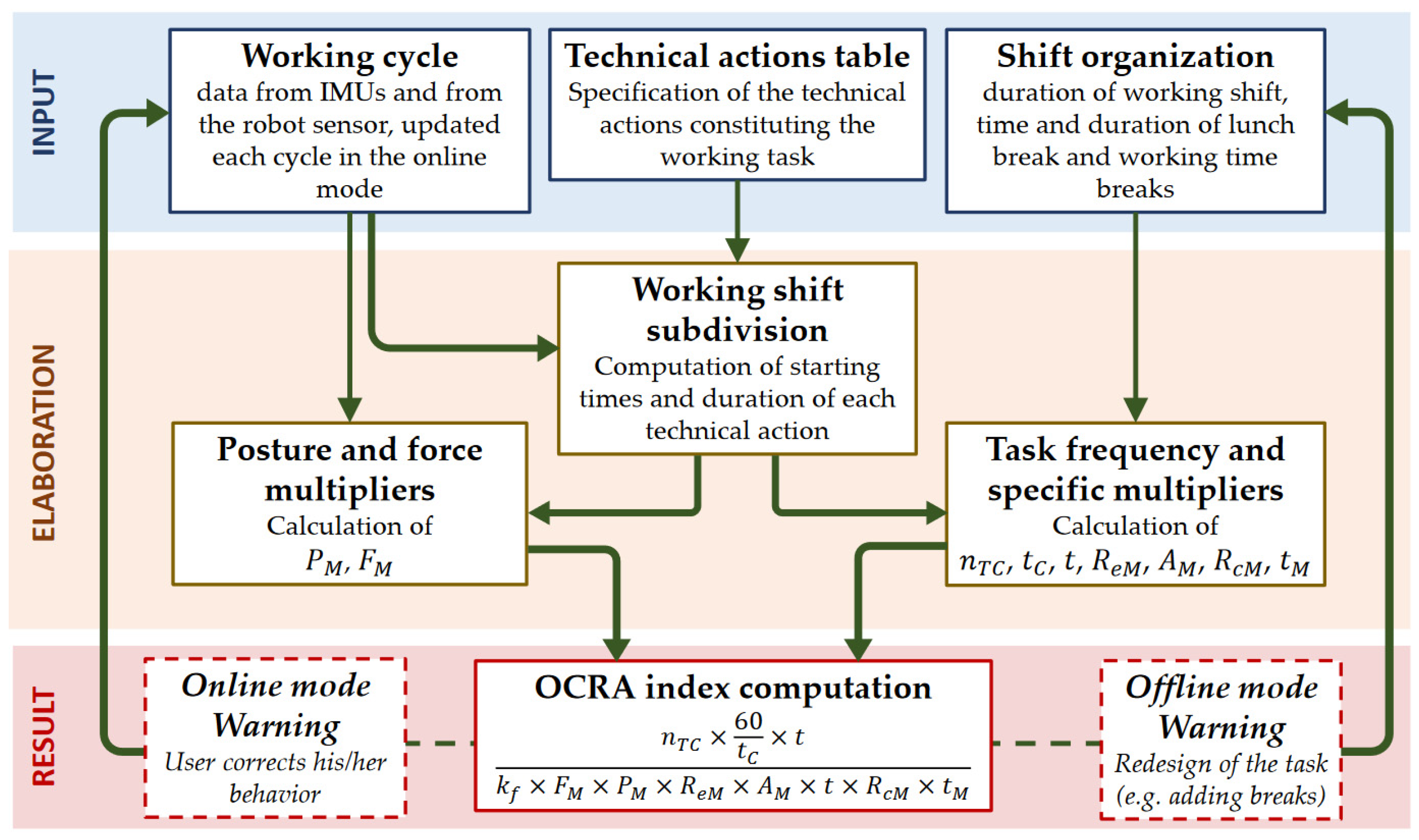
The “adapted” OCRA index calculation described in the previous paragraph was implemented to develop a MATLAB® app aimed at providing an estimation of the fatigue of the operator during a working shift. The workflow of the app is shown in Figure 1. A table containing the subdivision of the working task in technical actions (TAs) is provided as input, along with the working shift organization, i.e., the duration of the shift and the duration and times of the breaks. The data flow is shown in Figure 2: the measurements from the force/torque sensor and from the IMUs are communicated, respectively, through EtherCAT and WiFi protocol to the controller of the robot (a C++ code running within the ROS Control framework), and then, at the end of each cycle, they are saved in a csv file. The MATLAB 2020a app, then, acquires the data in the file and elaborates them to find the initial and final time of each TA. Then, based on the obtained subdivision and on the acquired posture and force data, FM and PM are computed. Based on shift organization, the task frequency and characteristic information multipliers are also calculated. Therefore, the OCRA index is obtained as per Equations (1)–(3).
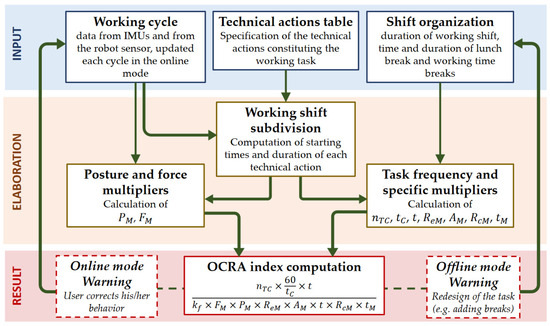
Figure 1.
Schematic representation of the workflow of the SaRAH app.
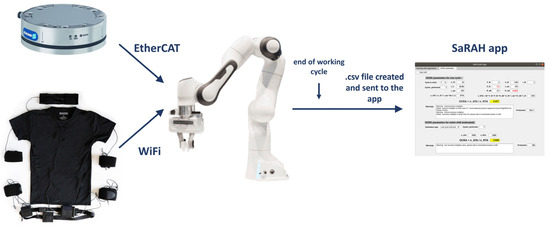
Figure 2.
Outline of the data flow in the proposed framework.
The SaRAH app provides two possible usage modes, offline and online. The offline mode is used to properly design the shift, in particular by setting the appropriate number of breaks to obtain an OCRA value in the “green zone”: one working cycle, performed preliminarily, is considered repeated during the whole working shift to forecast an estimation of the OCRA index. The online mode is instead suitable during the actual working shift to monitor the ergonomics level: the estimation of the OCRA index is updated at the end of each work cycle and the operator is warned to improve his/her behavior if he/she is starting to assume incorrect postures, which could result in high values of the index over the whole shift. In case the incorrect behavior continues over several cycles in spite of the warnings, the app will suggest to the user to take a short break.
Warnings provided at the end of the cycle (i.e., not strictly “real-time”) are appropriate because the objective of the app is not to avoid immediate dangerous situations, but to mitigate work-related diseases that might arise in the long term due to repetition of ergonomically erroneous behavior.
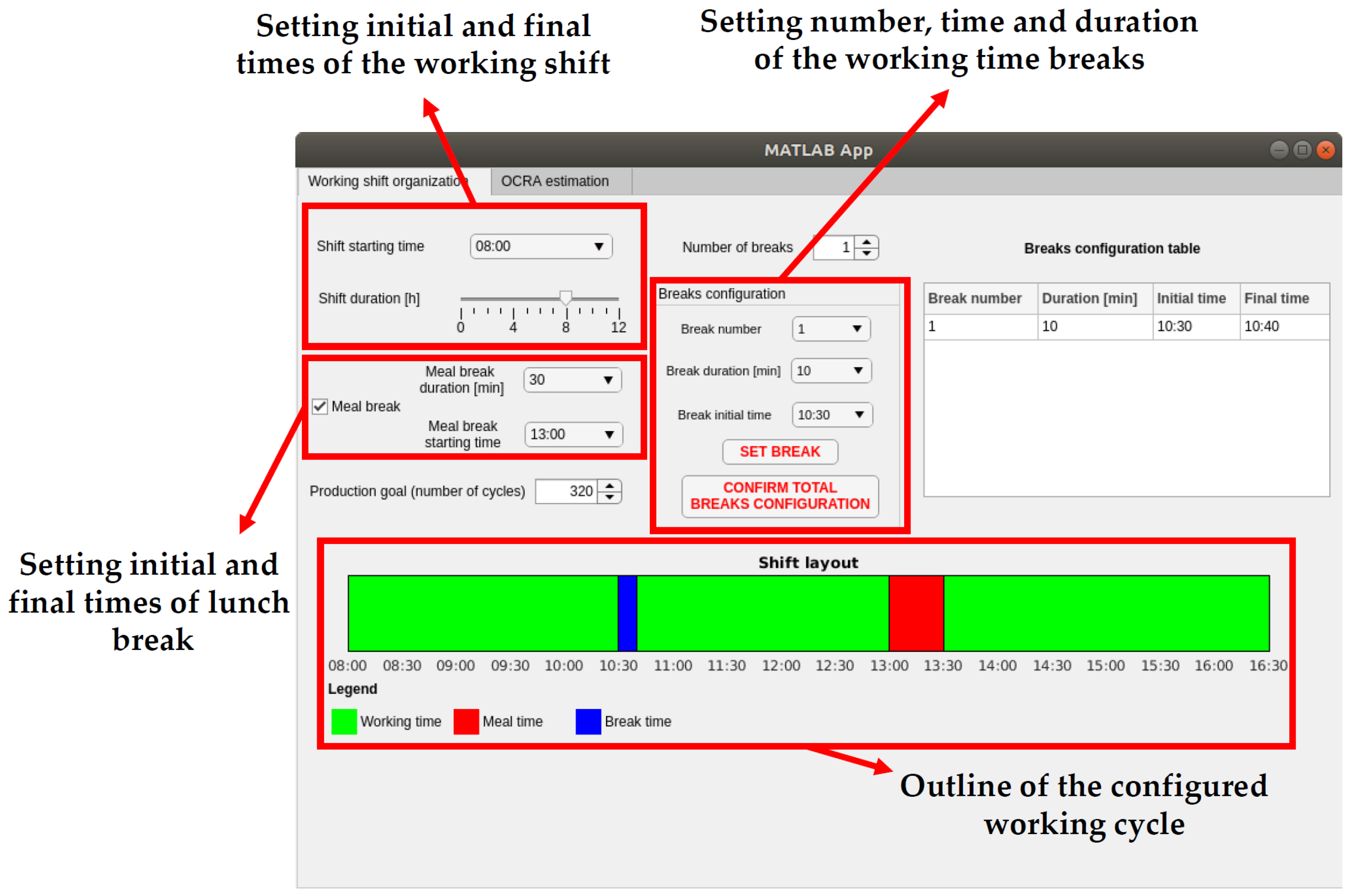
The SaRAH app interface features two main tabs. In the first tab (Figure 3), it is possible to configure the working shift, setting the overall duration and break times, as well as the desired number of cycles per working shift. These factors directly affect the OCRA index calculation, in particular the terms categorized as task frequency and characteristic information.
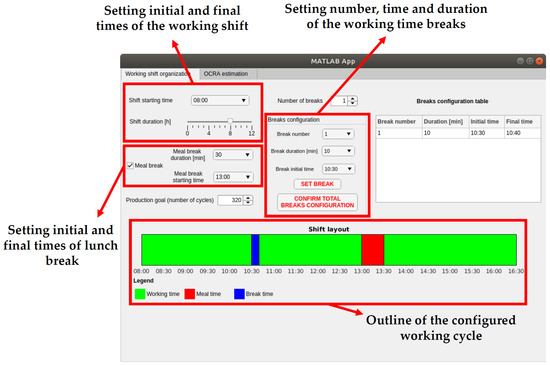
Figure 3.
Working shift configuration tab of the SaRaH app (the break time is considered to be included and the meal time to be excluded).
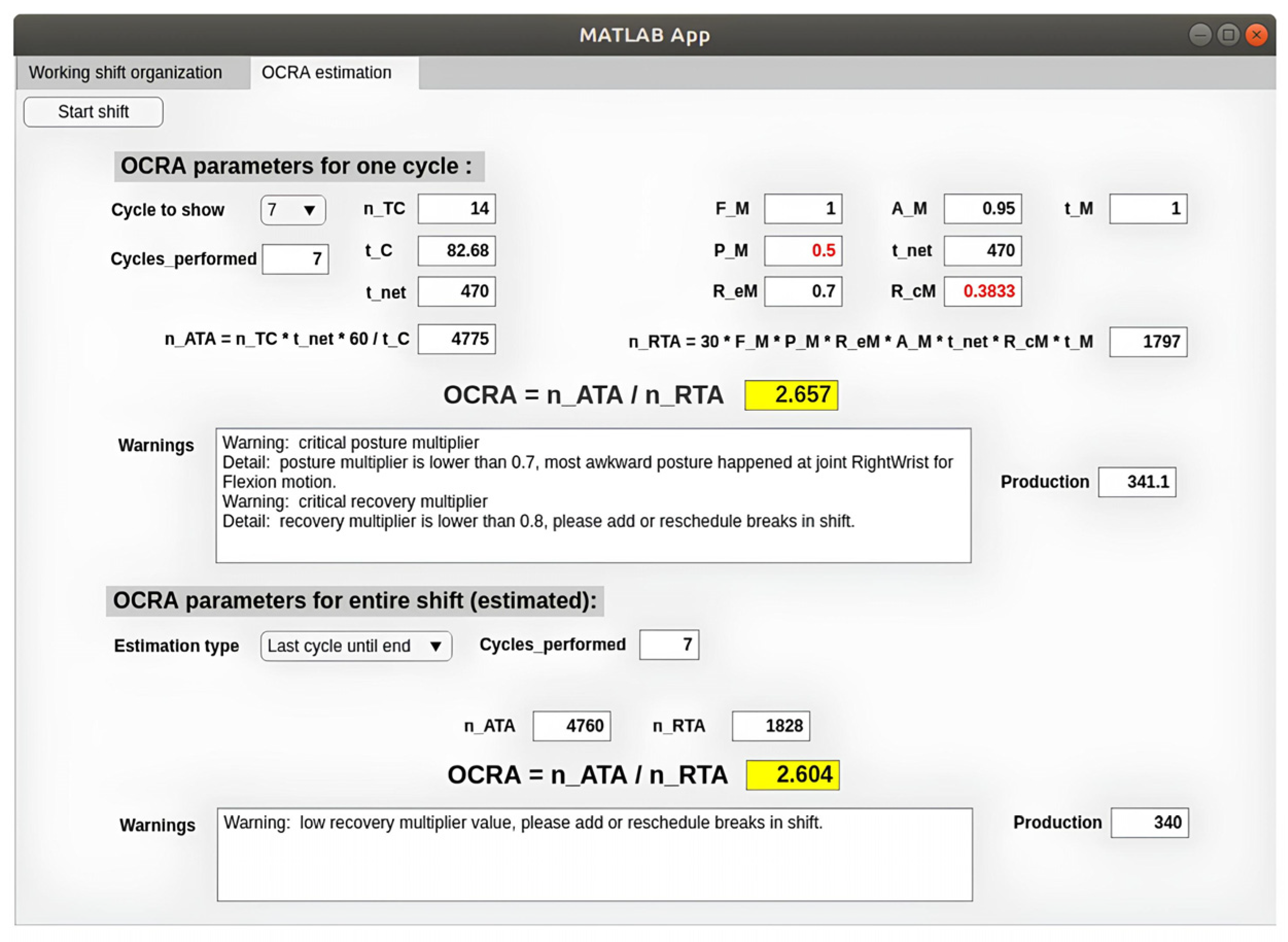
The second tab (Figure 4) shows the results of the OCRA index computation, which is updated in the online mode at the end of each working cycle. The upper part of the tab reports the results of each single cycle, which can be selected by the drop-down menu (by default the last performed is selected). The OCRA index displayed is forecasted considering the selected working cycle repeated over the whole shift. In the online mode, the value provides information about the performance of a specific cycle, whereas in the offline mode it can be directly considered to reshape, if necessary, the working shift (e.g., adding more breaks) to improve the calculated OCRA index by returning to the previous tab. A warning section indicates if any multiplier is becoming critical; in case of high values of the posture or force multiplier, the limb mostly affected is also indicated. In the lower part, the OCRA index estimated for the entire shift considering also the previous cycles is reported. Two different estimations can be obtained: “Mean”, based on the average of the recorded cycles, and “Last cycle until end”, which is instead based on the assumption that the performance of all the upcoming cycles will be the same as the last cycle in order to predict the necessity of any modification to the execution of the task.
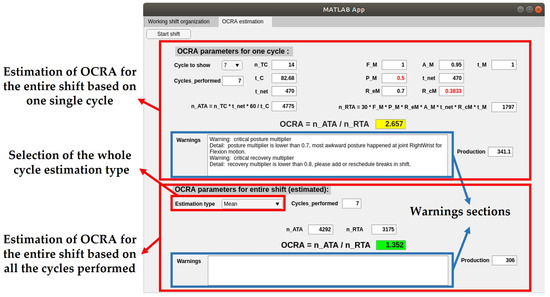
Figure 4.
OCRA estimation tab of the SaRAH app.
3. Tests and Results
3.1. Task and Workcell Description
In order to develop, test and validate the SaRAH app, a setup of an operating scenario was realized consisting of a workcell meant for a repetitive task to be performed with the support of a hand-guided collaborative robot. The task consists of creating four holes with an electric drill mounted as the end-effector of a robot: the first hole is on a planar surface, perpendicular to the ground, while the other three are on a vertical surface. Different drilling positions were used to test different working conditions for the upper limbs of the human operator, which could result in different musculoskeletal solicitations.
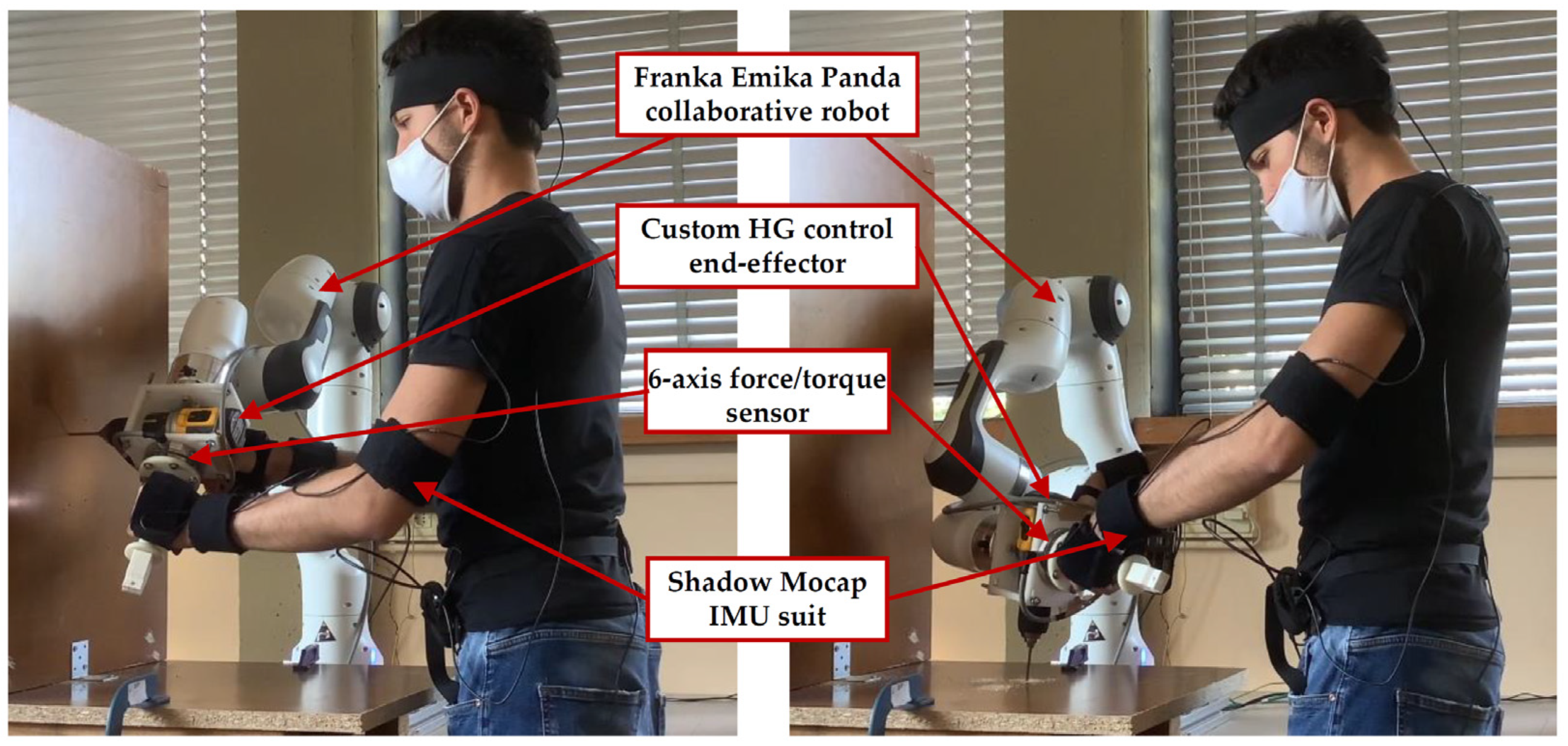
The workcell consists of the following components (see Figure 5):
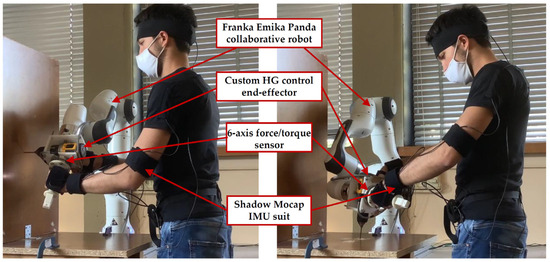
Figure 5.
Collaborative robotics application, showing the elements of the drilling cell.
- Franka Emika Panda robot: a seven-degree-of-freedom collaborative robot, having a cycle time of 1000 Hz and equipped with torque sensors in all the joints to measure end-effector loads and detect impacts with obstacles in the workspace. In case of an impact, the robot stops and enters into error status, thus preventing harmful interactions with humans within the workspace.
- An electric drill, mounted as the end-effector of the robot with a custom mechanical interface, made of 3D-printed flanges. The custom fixture is also provided with an additional handle so that the operator can grab the end-effector, which incorporates the drill, with his/her right hand on the drill grip and with their left hand on the additional handle. The handle also includes a button that enables switching between two different robot control modes (as detailed below).
- Schunk Axia80 sensor: a six-axis force/torque sensor sending data at a frequency of 1000 Hz and mounted in between the mechanical interface and a 3D-printed additional handle, in order to measure, together with the robot joint torque sensors, the forces and torques exerted by the human operator on the robot.
- Shadow MoCap suit: a system of 17 IMU sensors placed in several points of the human body (on the arms, legs, back, chest and head), sending data at a frequency of 400 Hz. The IMUs are used to track the position of the human body, which is needed to evaluate the effort of the operator. It is worth observing that the drifting issue typical of this type of sensor is mitigated in the considered set-up by the given information of hands position, which is obtained by robot encoders considering that the handle and the drill are constantly held.
Two robot control modes, which were selected by the user via a dedicated button on the custom handle, were set:
- Manual guidance mode: the operator moves the robot to the desired position to drill the hole. In this phase, the robot is controlled in torque, mainly providing compensation for the gravity force and a support action—driven by the force information acquired by the six-axis force sensor—necessary to compensate for the internal friction of joint gearsets.
- Drilling mode: in this phase, the robot is controlled in velocity and is activated when the force measured by the six-axis force sensor is higher than a pre-defined threshold in the direction of the tip of the drill. The robot is programmed to move forward (or backwards, depending on the direction of the force), minimizing the effort exerted by the operator and ensuring drilling direction. Weight compensation is also provided in this mode.
3.2. Evaluation with OCRA App
According to the OCRA protocol, the task was subdivided into TAs as initial input for the index calculation. In a single task, the following technical actions were performed for each hole:
- Position the end-effector (manual guidance control mode)
- Start bit rotation by pressing the drill trigger
- Push to drill (drilling control mode)
- Move away (drilling control mode)
Considering the four holes to be drilled, this resulted in 16 TAs characterizing the task, and the work cycle was subdivided accordingly by the SaRAH app. During task execution, the switch between the different TAs was identified based on the active control mode (the switching between manual guidance and drilling control mode was performed through a button on the handle) and, in the drilling mode, based on the motion direction (forward or backward).
3.2.1. Offline Mode
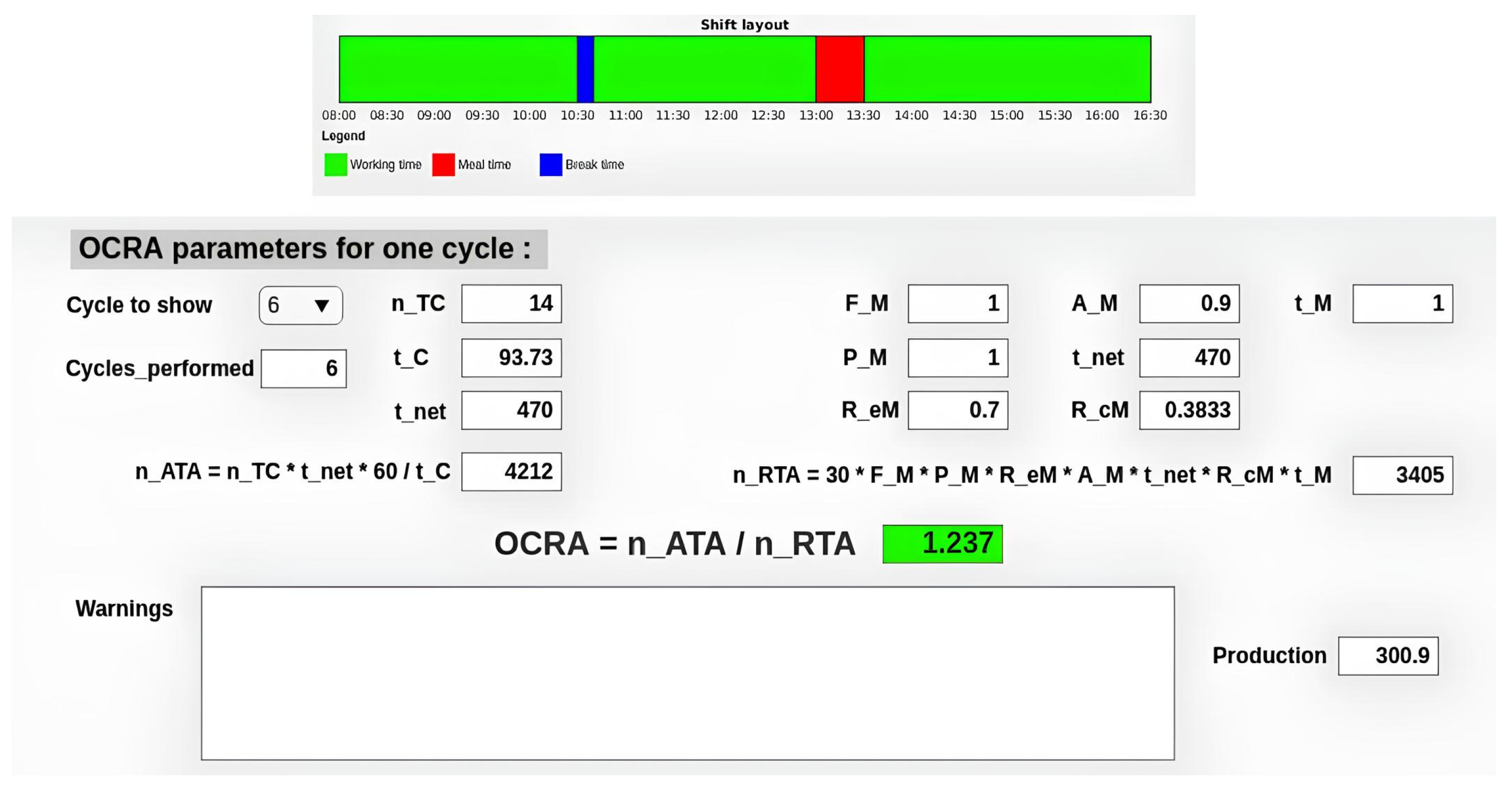
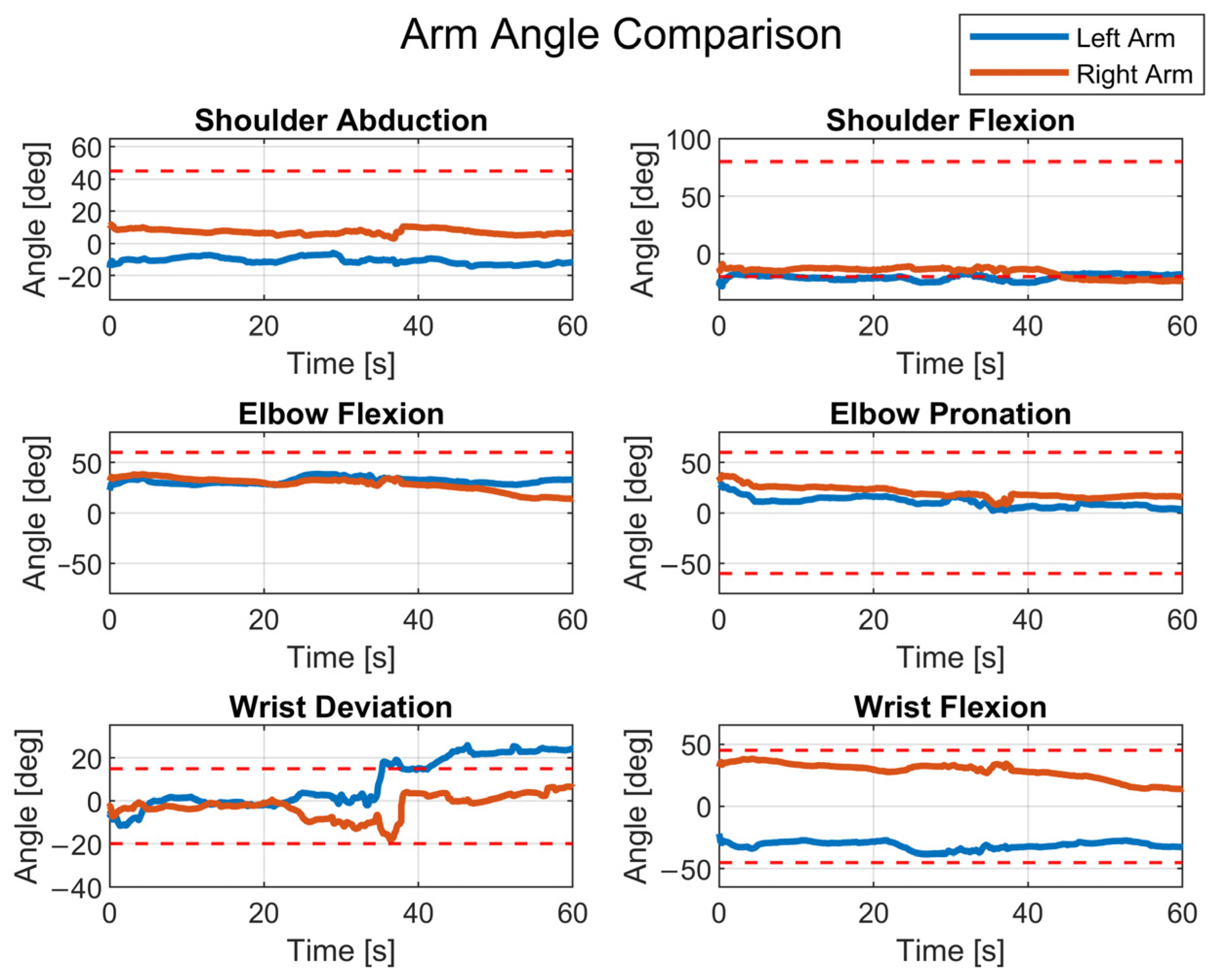
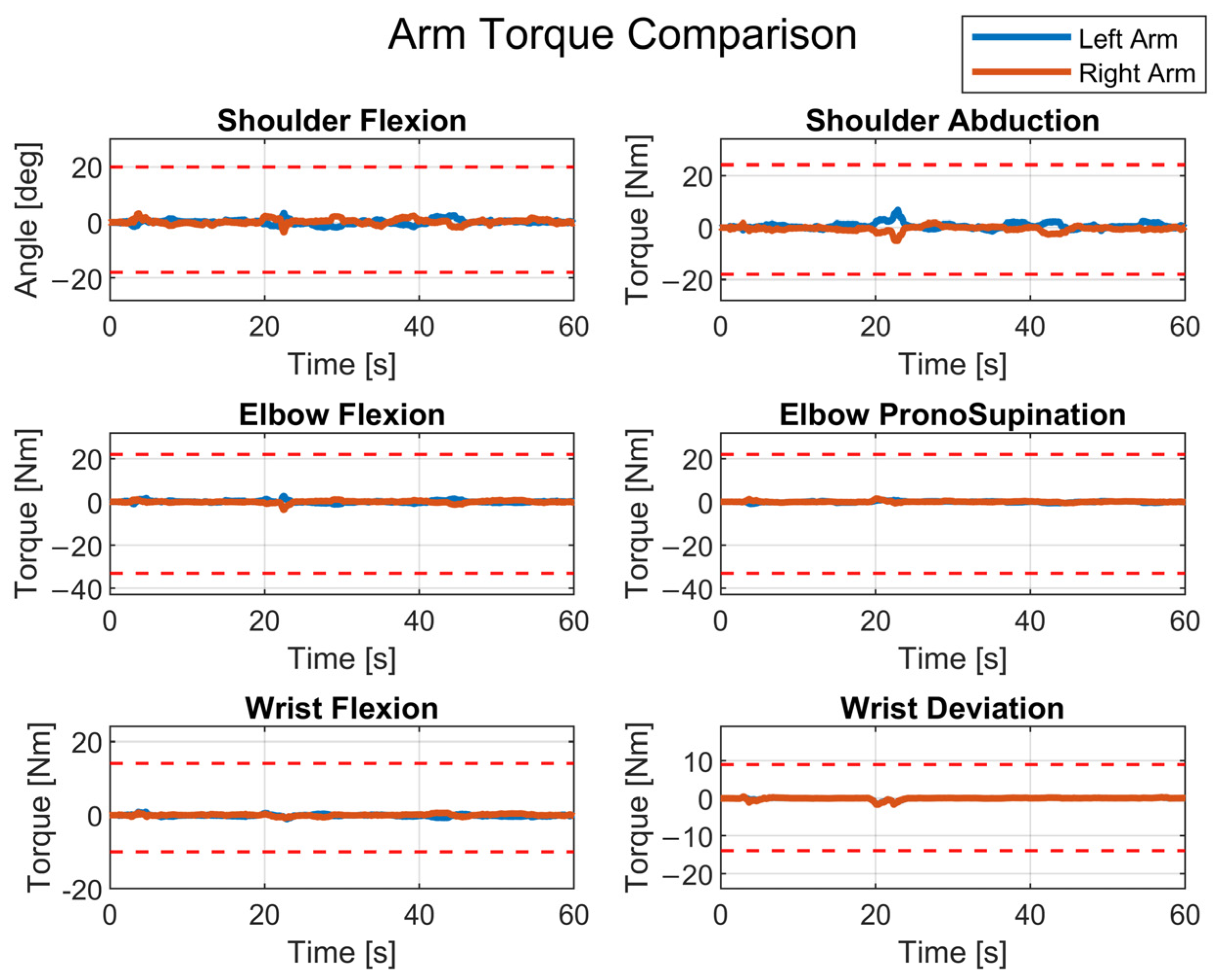
Figure 6 shows an example of an offline OCRA estimation. A working cycle was executed and its data recorded. Then the OCRA was computed with respect to these data and with the shift organization outlined in the upper part of the figure. It can be observed that the calculated OCRA index was in the yellow area, due to the low value of the recovery period multiplier, as indicated in the warning area. Instead, by computing the OCRA with respect to the same data but changing the shift organization by including a work break in the middle of the morning, the value of the recovery period multiplier increased, and the OCRA returned to the “green” zone, as shown in Figure 7. Figure 8 shows the body angles of the human operator, and Figure 9 shows the torques applied by him/her during the task. For both posture and force data, the critical limits are represented by the red dotted lines, and it can be observed that in the considered task the angles and the torques are not critical, resulting in good force and posture multipliers. In particular, the torques were always very far from the critical values because most of the force that needed to be applied to sustain the drill and to create the hole were applied by the robot, with the operator only guiding the end effector in the desired direction. This shows the benefits of using an HG collaborative solution. It has to be underlined that, if the HG control law of the robot did not work as well as the one introduced in this test, or if the task was performed by the operator alone, without the help of the robot, the app would provide lower values for the force multiplier. As for the postures, the deviation of the left wrist might seem problematic, but, according to [21], a wrist deviation exceeding the limits by less than 50% for up to one-third of the cycle time does not result in a modification of the posture multiplier.
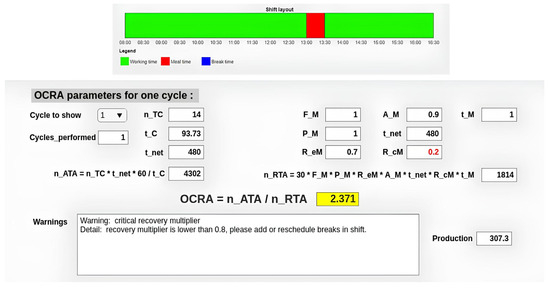
Figure 6.
OCRA offline estimation for a working shift without breaks: the recovery multiplier is low, resulting in a “yellow” estimation.
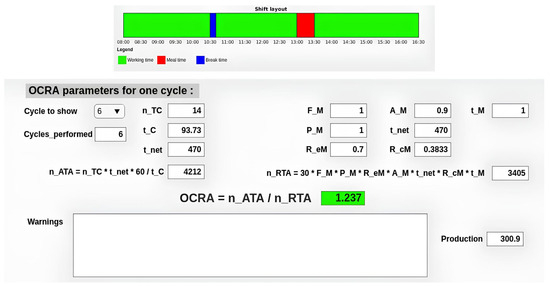
Figure 7.
OCRA offline estimation after adding a break in the middle of the morning: the shift is now ergonomically safe.
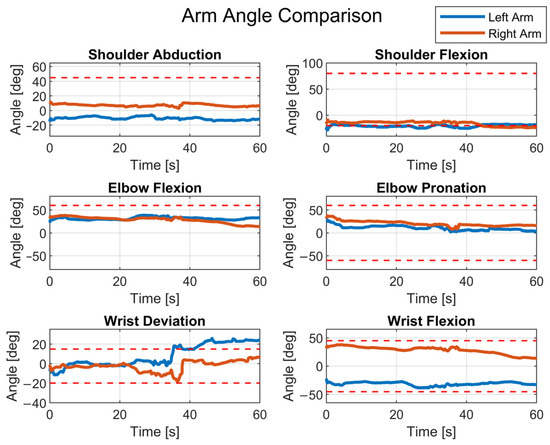
Figure 8.
Angles of the upper limbs for an ergonomically non-problematic working cycle (the red dashed lines indicate the limit angles).
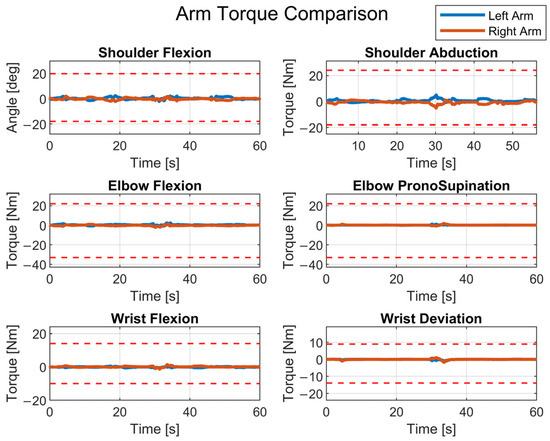
Figure 9.
Torques of the upper limbs for an ergonomically non-problematic working cycle (the red dashed lines indicate the limit torques).
3.2.2. Online Mode
To test the online mode of the app, several working cycles were performed in sequence. In particular, in the test hereafter commented on, the first six cycles were performed similarly to the cycle in Figure 8, while the seventh cycle was purposely performed with an unnatural posture of the upper limbs. This generated a low value of the posture multiplier, resulting in an OCRA value in the yellow zone. In the warnings section, which joint was undergoing the critical solicitation is also shown (in the test, prevalently the right wrist). Figure 10 shows the data which were used by the app to compute the posture multiplier. It can be observed that the body angle that overcame the limits for the greatest portion of the cycle time was the one related to the wrist flexion of the right hand. Even in this case, the torques applied by the operator were much lower than the limits for the whole cycle time, as shown in Figure 11. In Figure 12 and Figure 13, it can be observed that the estimated OCRA index over the entire shift after the seventh cycle was still in the “green” zone if the “Mean” method was used to obtain the estimation. This was due to the fact that the last cycle was given the same weight as the previous ones, while OCRA entered the “yellow” zone if the “Last cycle until end” method was used.
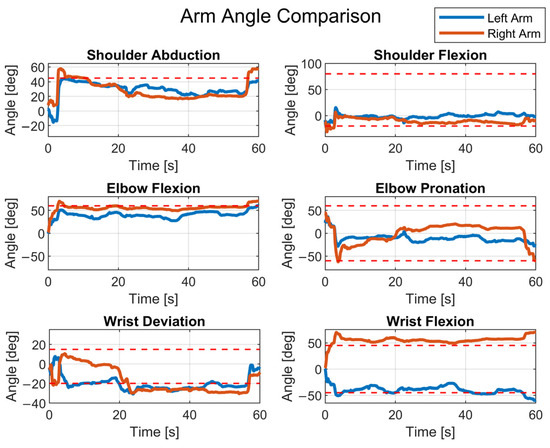
Figure 10.
Angles of the upper limbs for a working cycle in which the posture is problematic (the red dashed lines indicate the limit angles).
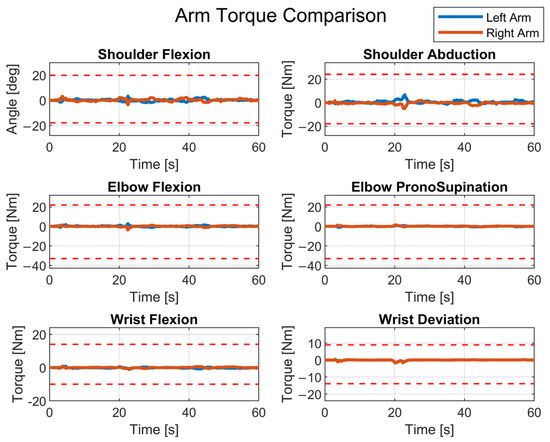
Figure 11.
Torques of the upper limbs for a working cycle in which the posture is problematic (the red dashed lines indicate the limit torques).
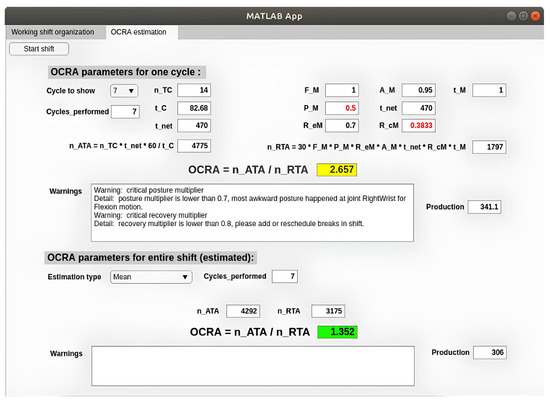
Figure 12.
OCRA online estimation using the mean method.
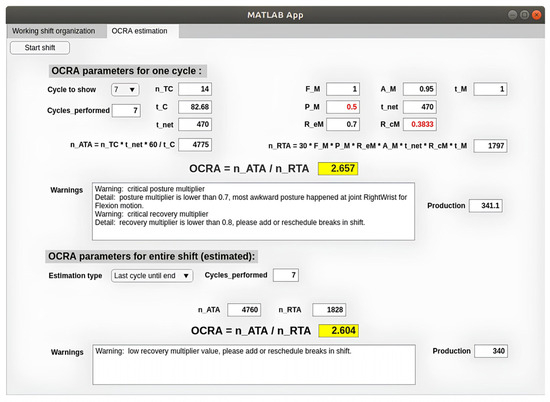
Figure 13.
OCRA online estimation using the last cycle until end method.
In the online mode, the app can therefore provide the operator with feedback information on whether he/she is performing the task correctly or some of his/her movements are non-ergonomic, possibly due to fatigue occurring after some hours of repetitive work. In this way, the operator can correct his/her behavior and mitigate the risk of musculoskeletal injuries in the long term or take a short break.
4. Discussion
Several approaches have been proposed so far to improve physical ergonomics in human–robot collaboration. On a general basis, the methodologies proposed in the literature aim either at an optimal planning of human/robot tasks or at providing real-time posture correction, targeting tasks characterized by co-manipulation or human–robot coordination in collaborative assemblies. The methodologies and software application presented in this paper are instead dedicated to HG applications, considered potentially critical from the ergonomic perspective in terms of forces or stressful postures occurring while guiding the robot. The described approach is particularly suitable for such kinds of applications because in an HG task, the forces exerted by the user (needed for the computation of the force multiplier) can easily be measured with a force/torque sensor mounted on the end effector.
As already mentioned, the OCRA index calculation, which is claimed to be the most appropriate methodology for ergonomics assessment of repetitive manual activities, is innovatively used in an automated assessment approach. Another benefit of the proposed methodology is that it provides all the parameters needed for the ergonomic evaluation from computations, while other methods often rely on the subjective perception of the user. Furthermore, not only static nominal working positions are considered, but the analysis is also performed on the whole motion of the user.
A limitation of the present study is that the forces exerted by the muscles of the human muscles are estimated from the forces read by the force/torque sensor on the end effector: a direct sensing of the muscle activation, e.g., with electromyography sensors, might be more accurate. However, such sensors would be much more invasive and would not be appropriate for daily usage in an industrial setting. Moreover, as already mentioned, the proposed approach will be the object of a wider campaign considering the execution of several HG tasks performed by different participants.
4.1. Offline Task Planning
The approach presented in [25] aims at the minimization of the ergonomic cost, based on a “modified” REBA score, by analyzing offline a simulation of the task to optimize both the operator sequence and robot path. As remarked, the approach proposed here targets HG tasks, rather than collaborative assemblies with pre-planned robot trajectories. Moreover, the SaRAH app enables one to also take into account the forces applied by the operator and the accumulated stress, which stand as crucial factors for ergonomic assessments.
4.2. Online Ergonomics Improvement
Other approaches presented in the literature aim at the real-time correction, by means of the robot or the workpiece pose, enabling the optimal posture of the operator and thus ergonomic improvement [26,30,31]. To reconstruct the operator position within the working volume, vision systems are commonly the principal means of acquisition. Instead, in the methodology presented in this paper, human poses and movements rely on IMU suit acquisitions. Additionally, in contrast to other methodologies, the online functionality of the SaRAH app is meant to correct operator behavior and improve ergonomics by calculating the OCRA index over each task repetition, providing a global evaluation which takes into account the accumulated stress and the specific work shift. As a further difference with other approaches, the proposed architecture does not rely on the control of the robot, being suitable to existing applications without affecting the system design phase.
5. Conclusions
With the spread of human–robot collaboration as an actual industrial trend, rather than a mere development directive, safety-related issues often represent the barrier towards the full exploitation of technological advancements. As a consequence, dealing with safety and ergonomics is gaining increasing interest in both the research and industrial communities. In particular, several research approaches are currently being proposed either to ensure safety during collaborative tasks or to support the development of collaborative applications verifying the compliance with safety and ergonomics principles. However, due to the lack of specific standards, a number of scenarios still require adequate solutions.
In this paper, a MATLAB-based software application aimed at ergonomic assessment in HG collaborative tasks—the “SaRAH app”—was presented. As an innovative approach to the robotics field, the analyses performed by the software build on the so-called “OCRA” protocol, the state-of-art procedure reported in the standards to deal with tasks involving repetitive actions of the upper limbs. Such a procedure was appropriately adapted, particularly regarding the computation of the force multiplier, considering the specificity of HG collaborative applications which often include the real-time monitoring of the operator’s movements. The approach was tested on a specific setup developed on purpose consisting of a collaborative HG drilling station in which a collaborative robot supports an operator to create a series of holes in wood panels. The motion of the human operator is acquired by a suit of wearable IMUs, while his/her effort is monitored through a six-axis force sensor installed in a custom HG control end-effector.
As shown by the usage tests and results, the SaRAH App is capable of efficiently providing support either in task design, enabling offline analyses of the sequence to be performed by the operator, or during the actual working shift, providing alerts whenever behaviors or movements become hazardous, considering the repetitiveness of the task. The reported trials demonstrate that modifying the number and duration of breaks directly affects the OCRA index calculation, enabling the offline modification of the task and the minimization of hazards. Moreover, by way of example, the posture multiplier graphs reported for the online trials show how data are processed online to generate alerts in hazardous conditions. Furthermore, in both cases, it can be observed that torque multipliers are characterized by extremely low values, demonstrating the effective reduction of ergonomic risks and fatigue obtainable thanks to the adoption of a collaborative HG robot.
Future developments of this work will concern the validation of the approach based on tests involving a larger group of participants, possibly external to the research group, performing a set of different HG tasks.
Author Contributions
Conceptualization, M.V., L.A. and R.V.; methodology, E.M., G.A., Y.C. and E.P.; software, E.M., L.A. and Y.C.; validation, G.A. and Y.C.; formal analysis, E.M., G.A. and M.V.; writing, E.M., M.V., G.A. and R.V.; project administration, L.A. and R.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the European Union’s Horizon 2020 research and innovation program under grant agreement No. 779966.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bauer, A.; Wollherr, D.; Buss, M. Human-robot collaboration: A survey. Int. J. Humanoid Robot. 2008, 5, 47–66. [Google Scholar] [CrossRef]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human-robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Sherwani, F.; Asad, M.M.; Ibrahim, B.S.K.K. Collaborative Robots and Industrial Revolution 4.0 (IR 4.0). In Proceedings of the International Conference on Emerging Trends in Smart Technologies (ICETST), Karachi, Pakistan, 26–27 March 2020; pp. 1–5. [Google Scholar]
- Salunkhe, O.; Stensöta, O.; Åkerman, M.; Berglund, A.F.; Alveflo, P. Assembly 4.0: Wheel Hub Nut Assembly Using a Cobot. IFAC-Pap. 2019, 52, 1632–1637. [Google Scholar] [CrossRef]
- International Federation of Robotics. World Robotics 2022, Presentation. Available online: https://ifr.org/downloads/press2018/2022_WR_extended_version.pdf (accessed on 23 March 2023).
- Alves, J.; Lima, T.M.; Gaspar, P.D. Is Industry 5.0 a Human-Centred Approach? A Systematic Review. Processes 2023, 11, 193. [Google Scholar] [CrossRef]
- Maurtua, I.; Ibarguren, A.; Kidal, J.; Susperregi, L.; Sierra, B. Human-robot collaboration in industrial applications: Safety, interaction and trust. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417716010. [Google Scholar] [CrossRef]
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human-robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Saenz, J.; Behrens, R.; Schulenburg, E.; Petersen, H.; GIbaru, O.; Neto, P.; Elkmann, N. Methods for considering safety in design of robotics application featuring human-robot collaboration. Int. J. Adv. Manuf. Tech. 2020, 107, 2313–2331. [Google Scholar] [CrossRef]
- ISO/TS 15066:2016; Robots and Robotic Devices—Collaborative Robots. International Organization for Standardization: Geneva, Switzerland, 2016.
- Valori, M.; Scibilia, A.; Fassi, I.; Saenz, J.; Behrens, R.; Herbster, S.; Bidard, C.; Lucet, E.; Magisson, A.; Schaake, L.; et al. Validating Safety in Human-Robot Collaboration: Standards and New Perspectives. Robotics 2021, 10, 65. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging research fields in safety and ergonomics in industrial collaborative robotics: A systematic literature review. Robot. Comput. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Arents, J.; Abolins, V.; Judvaitis, J.; Vismanis, O.; Oraby, A.; Ozols, K. Human–Robot Collaboration Trends and Safety Aspects: A Systematic Review. Sens. Actuator Netw. 2021, 10, 48. [Google Scholar] [CrossRef]
- Scibilia, A.; Valori, M.; Pedrocchi, N.; Fassi, I.; Herbster, S.; Behrens, R.; Saenz, J.; Magisson, A.; Bidard, C.; Kühnrich, M.; et al. Analysis of Interlaboratory Safety Related Tests in Power and Force Limited Collaborative Robots. IEEE Access 2021, 9, 80873–80882. [Google Scholar] [CrossRef]
- de Kok, J.; Vroonhof, P.; Snijders, J.; Roullis, G.; Clarke, M.; Peereboom, K.; van Dorst, P.; Isusi, I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU. European Agency for Safety and Health at Work. 2020. Available online: https://data.europa.eu/doi/10.2802/66947 (accessed on 23 March 2023).
- Kolus, A.; Wells, R.; Neumann, P. Production quality and human factors engineering: A systematic review and theoretical framework. Appl. Ergon. 2018, 73, 55–89. [Google Scholar] [CrossRef]
- Rodrick, D.; Karwowski, W.; Sherehiy, B. Human Factors and Ergonomics Standards. In Handbook of Human Factors and Ergonomics, 4th ed.; Salvendy, G., Ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- ISO 11228-1:2021; Ergonomics—Manual Handling—Part 1: Lifting, Lowering and Carrying. International Organization for Standardization: Geneva, Switzerland, 2021.
- ISO 11228-2:2021; Ergonomics—Manual Handling—Part 2: Pushing and Pulling. International Organization for Standardization: Geneva, Switzerland, 2007.
- ISO 11228-3:2021; Ergonomics—Manual Handling—Part 3: Handling of Low Load at High Frequency. International Organization for Standardization: Geneva, Switzerland, 2007.
- Occhipinti, E.; Colombini, D. The OCRA Method: Assessment of Exposure to Occupational Repetitive Actions of the Upper Limbs. In International Encyclopedia of Ergonomics and Human Factors; Krawowski, W., Ed.; Taylor & Francis: London, UK; New York, NY, USA, 2001; Volume 1, pp. 1875–1879. [Google Scholar]
- Lorenzini, M.; Lagomarsino, M.; Fortini, L.; Gholami, S.; Ajoudani, A. Ergonomic human-robot collaboration in industry: A review. Front. Robot. AI 2023, 9, 813907. [Google Scholar] [CrossRef]
- Hignett, S.; McAtamney, L. Rapid entire body assessment (REBA). Appl. Ergon. 2000, 31, 201–205. [Google Scholar] [CrossRef]
- Busch, B.; Toussaint, M.; Lopes, M. Planning ergonomic sequences of actions in human-robot interaction. In Proceedings of the International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1916–1923. [Google Scholar]
- Zanchettin, A.M.; Lotano, E.; Rocco, P. Collaborative robot assistant for the ergonomic manipulation of cumbersome objects. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6729–6734. [Google Scholar]
- El Makrini, I.; Merckaert, K.; De Winter, J.; Lefeber, D.; Vanderborght, B. Task allocation for improved ergonomics in human-robot collaborative assembly. Interact. Stud. 2019, 20, 102–133. [Google Scholar] [CrossRef]
- McAtamney, L.; Corlett, E.N. RULA: A survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar] [CrossRef]
- Ferraguti, F.; Villa, R.; Landi, C.T.; Zanchettin, A.M.; Rocco, P.; Secchi, C. A unified architecture for physical and ergonomic human–robot collaboration. Robotica 2020, 38, 669–683. [Google Scholar] [CrossRef]
- Shafti, A.; Ataka, A.; Lazpita, B.U.; Shiva, A.; Wurdemann, H.A.; Althoefer, K. Real-time robot-assisted ergonomics. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1975–1981. [Google Scholar]
- Waters, T.R.; Putz-Anderson, V.; Garg, A.; Fine, L.J. Revised niosh equation for the design and evaluation of manual lifting tasks. Ergonomics 1993, 36, 749–776. [Google Scholar] [CrossRef]
- Fusaro, F.; Lamon, E.; De Momi, E.; Ajoudani, A. A human-aware method to plan complex cooperative and autonomous tasks using behavior trees. In Proceedings of the International Conference on Humanoid Robots (Humanoids), Munich, Germany, 19–21 July 2021; pp. 522–529. [Google Scholar]
- Stradioto, J.P.; Michaloski, A.O.; de Paula Xavier, A.A.; Colombini, D. Comparison of RULA and Checklist OCRA Ergonomic Risk Methods for Civil Construction. Ind. Eng. Manag. Syst. 2020, 19, 790–802. [Google Scholar] [CrossRef]
- Colombini, D. Scientific basis of the OCRA method for risk assessment of biomechanical overload of upper limb, as preferred method in ISO standards on biomechanical risk factors. Scand. J. Work Environ. Health 2018, 44, 46–438. [Google Scholar] [CrossRef]
- Triviño-Tonato, E.; Masood, J.; Cibeira, R.P.; Dacal-Nieto, A. CO-GUIDING: Ergonomic Analysis of a Hand Guidance System for Car Door Assembly. Wearable Robotics: Challenges and Trends. WeRob 2020. Biosyst. Biorobot. 2020, 202, 27. [Google Scholar]
- Gopinath, V.; Johansen, K.; Ölvander, J. Risk assessment for collaborative operation: A case study on hand-guided industrial robots. In Risk Assessment; Svalova, V., Ed.; Intech Open: Rijeka, Croatia, 2018; pp. 167–189. [Google Scholar]
- Saenz, J.; Bessler, J.; Valori, M.; Prange, G.; Fassi, I.; Bidard, C.; Bach Lassen, A.; Paniti, I.; Toth, A.; Stuke, T.; et al. An Online Toolkit for Applications Featuring Collaborative Robots Across Different Domains. IEEE Trans. Hum. Mach. Syst. 2022, 53, 657–667. [Google Scholar] [CrossRef]
- Stefana, E.; Marciano, F.; Rossi, D.; Cocca, P.; Tomasoni, G. Wearable Devices for Ergonomics: A Systematic Literature Review. Sensors 2021, 21, 777. [Google Scholar] [CrossRef]
- Lenzi, S.E.; Standoli, C.E.; Andreoni, G.; Perego, P.; Lopomo, N.F. Comparison Among Standard Method, Dedicated Toolbox and Kinematic-Based Approach in Assessing Risk of Developing Upper Limb Musculoskeletal Disorders. In Advances in Human Factors in Wearable Technologies and Game Design; Ahram, T.Z., di Cham, A.C., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 795, pp. 135–145. [Google Scholar] [CrossRef]
- EN 1005-3 2002+A1:2008; Safety of Machinery—Human Physical Performance—Part 3: Recommended Force Limits for Machinery Operation. European Committee for Standardization: Bruxelles, Belgium, 2008.
- Avallone, G.; Monari, E.; Chen, Y.; Agostini, L.; Sancisi, N.; Vertechy, R. A COBOT-IMU Hand-Guiding System with Online Collision Avoidance in Null Space. In ROMANSY 24-Robot Design, Dynamics and Control: Proceedings of the 24th CISM IFToMM Symposium; Springer International Publishing: Cham, Switzerland, 2022; pp. 151–159. [Google Scholar]
- Contini, R.; Drillis, R.J.; Bluestein, E.M. Determination of Body Segment Parameters. Hum. Factors 1963, 5, 493–504. [Google Scholar] [CrossRef]
- Latella, C.; Kuppuswamy, N.; Romano, F.; Traversaro, S.; Nori, F. Whole-body human inverse dynamics with distributed micro-accelerometers, gyros and force sensing. Sensors 2016, 16, 727. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).