
Graph Convolutional Network Based on CQT Spectrogram for Bearing Fault Diagnosis

 and
and
Abstract
1. Introduction
- Utilize CQT for spectral analysis: The paper applies CQT for spectral analysis of vibration signals into a logarithmic frequency scale. This transformation provides a variable frequency resolution for facilitating the graph modeling and remove redundant information.
- Innovatively model vibration signals as a graph structure: Unlike traditional methods that treat vibration signals linearly, this paper models these signals as graphs in the frequency domain. In this graph-based representation, nodes represent different frequency bins, while edges depict the harmonic relationships between these frequencies.
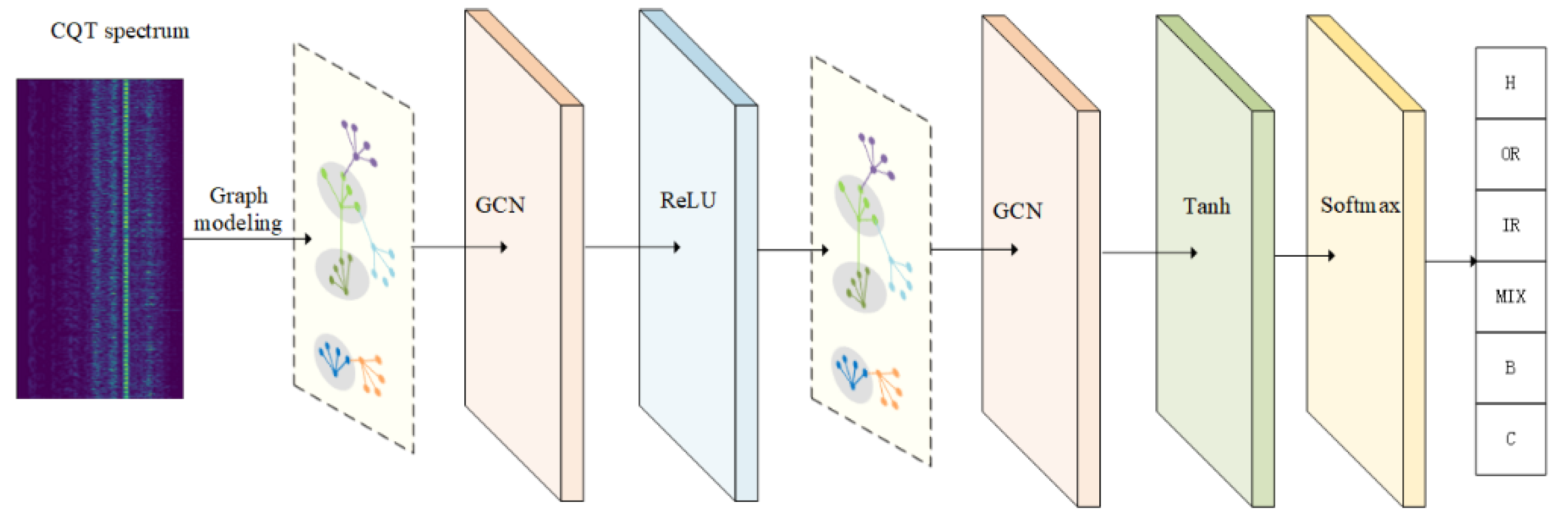
- Develop a GCN-based model for bearing fault diagnosis: A GCN is utilized to automatically learn the complex mapping function from CQT spectrum to fault categories. Experimental results demonstrate that the proposed approach is very effective.
2. Preliminary
2.1. Constant-Q Transform
2.2. Graph Convolutional Network
3. Proposed Approach
3.1. Spectrum Modeling Using Graph
3.2. GCN Feature Learning
3.3. Fault Classification
4. Experimental Results and Discussion
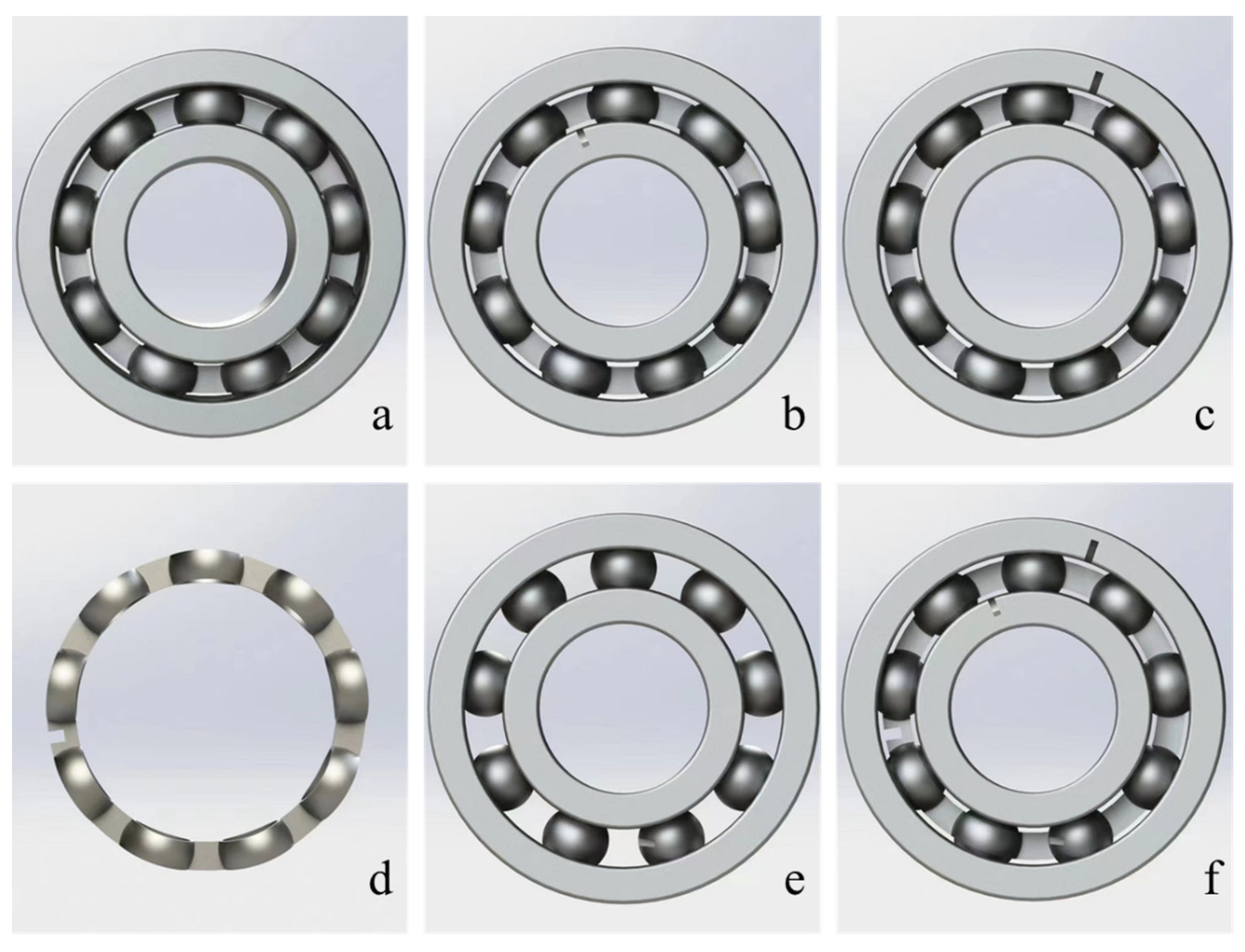
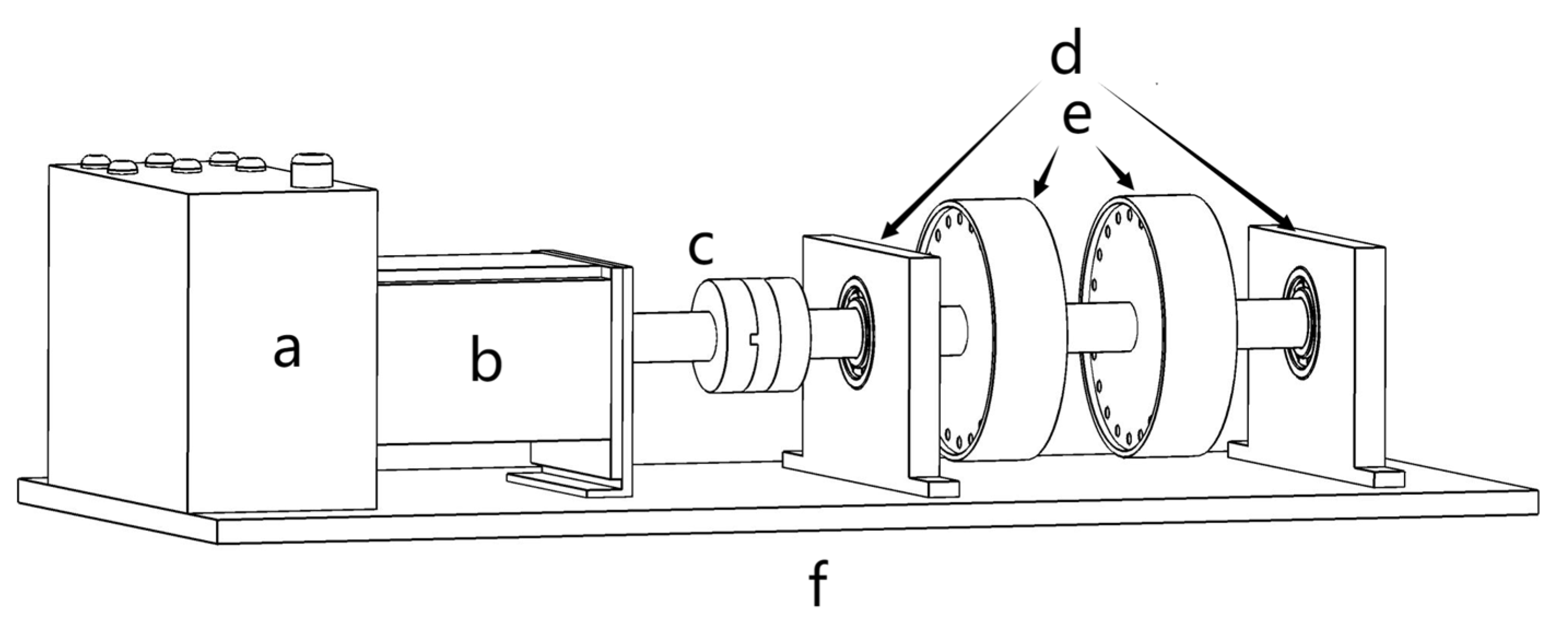
4.1. Dataset Description
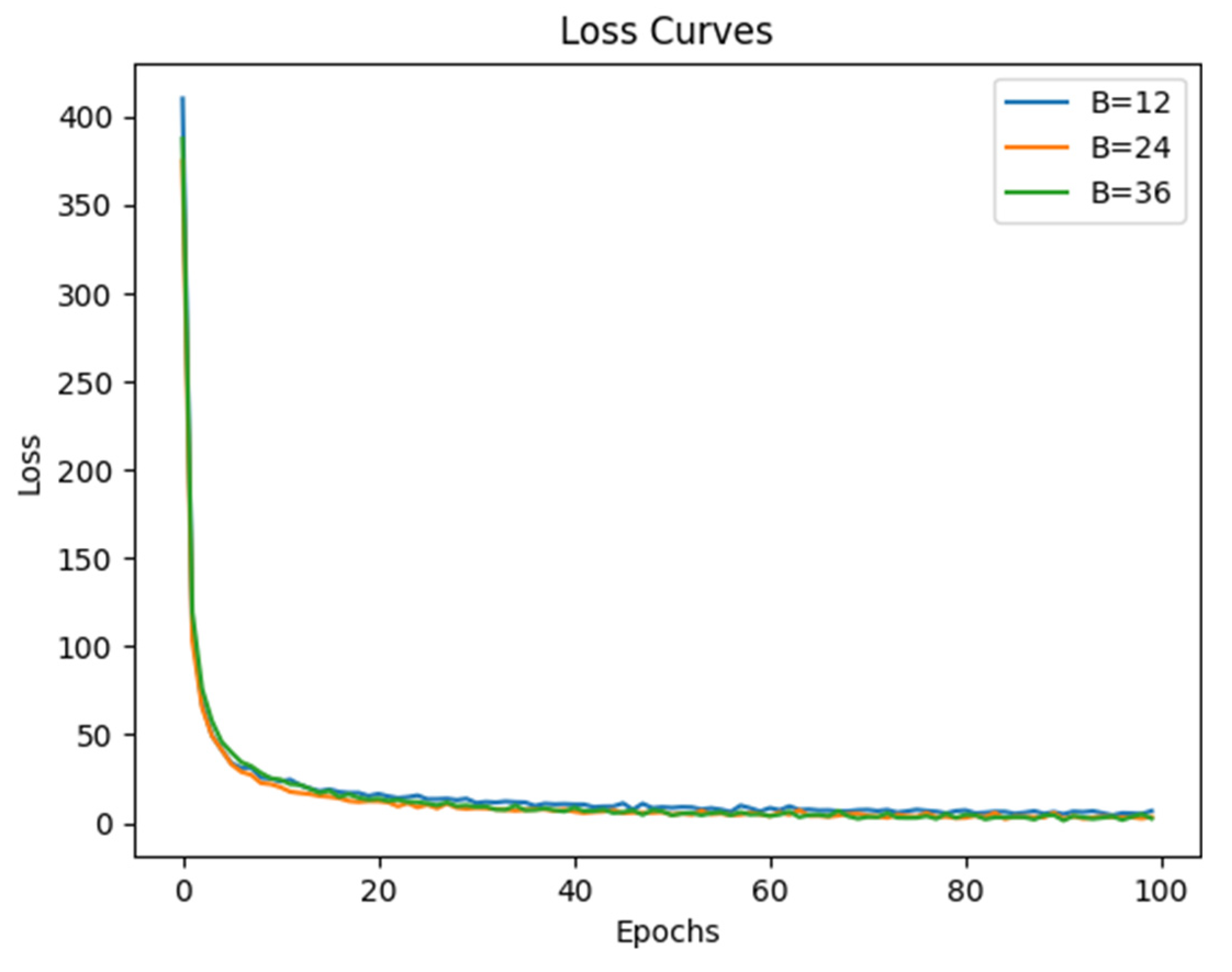
4.2. Parameter Setting
4.3. Evaluation Metrics
4.4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, W.; Ni, G.; Cao, Y.; Wang, H. Research on a rolling bearing health monitoring algorithm oriented to industrial big data. Measurement 2021, 185, 110044. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Wang, K.; Zhai, W. Surface wear evolution of traction motor bearings in vibration environment of a locomotive during operation. Sci. China Technol. Sci. 2022, 65, 920–931. [Google Scholar] [CrossRef]
- Manieri, F.; Stadler, K.; Morales-Espejel, G.E.; Kadiric, A. The origins of white etching cracks and their significance to rolling bearing failures. Int. J. Fatigue 2019, 120, 107–133. [Google Scholar] [CrossRef]
- Vasić, M.; Stojanović, B.; Blagojević, M. Failure analysis of idler roller bearings in belt conveyors. Eng. Fail. Anal. 2020, 117, 104898. [Google Scholar] [CrossRef]
- Hasan, M.J.; Islam, M.M.; Kim, J.M. Acoustic spectral imaging and transfer learning for reliable bearing fault diagnosis under variable speed conditions. Measurement 2019, 138, 620–631. [Google Scholar] [CrossRef]
- Gupta, P.; Pradhan, M.K. Fault detection analysis in rolling element bearing: A review. Mater. Today Proc. 2017, 4, 2085–2094. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, L. An intelligent fault diagnosis method of rolling bearings based on short-time Fourier transform and convolutional neural network. J. Fail. Anal. Prev. 2023, 23, 795–811. [Google Scholar] [CrossRef]
- Moshrefzadeh, A.; Fasana, A. The Autogram: An effective approach for selecting the optimal demodulation band in rolling element bearings diagnosis. Mech. Syst. Signal Process. 2018, 105, 294–318. [Google Scholar] [CrossRef]
- Wu, K.; Chu, N.; Wu, D.; Antoni, J. The Enkurgram: A characteristic frequency extraction method for fluid machinery based on multi-band demodulation strategy. Mech. Syst. Signal Process. 2021, 155, 107564. [Google Scholar] [CrossRef]
- Chen, X.; Guo, Y.; Na, J. Improvement on IESFOgram for demodulation band determination in the rolling element bearings diagnosis. Mech. Syst. Signal Process. 2022, 168, 108683. [Google Scholar] [CrossRef]
- Hebda-Sobkowicz, J.; Zimroz, R.; Wyłomańska, A.; Antoni, J. Infogram performance analysis and its enhancement for bearings diagnostics in presence of non-Gaussian noise. Mech. Syst. Signal Process. 2022, 170, 108764. [Google Scholar] [CrossRef]
- Alonso-González, M.; Díaz, V.G.; Pérez, B.L.; G-Bustelo, B.C.P.; Anzola, J.P. Bearing fault diagnosis with envelope analysis and machine learning approaches using CWRU dataset. IEEE Access 2023, 11, 57796–57805. [Google Scholar] [CrossRef]
- Huzaifah, M. Comparison of time-frequency representations for environmental sound classification using convolutional neural networks. arXiv 2017, arXiv:1706.07156. [Google Scholar]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep learning algorithms for bearing fault diagnostics—A comprehensive review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Bearing fault detection and diagnosis using case western reserve university dataset with deep learning approaches: A review. IEEE Access 2020, 8, 93155–93178. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A survey on deep learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Liao, J.X.; Dong, H.C.; Sun, Z.Q.; Sun, J.; Zhang, S.; Fan, F. Attention-embedded quadratic network (qttention) for effective and interpretable bear-ing fault diagnosis. IEEE Trans. Instrum. Meassurement 2023, 72, 1–13. [Google Scholar] [CrossRef]
- Qi-Yu, T.A.N.; Ping, M.A.; Hong-Li, Z.H.A.N.G. Fault Diagnosis of Rolling Bearings Based on Graph Convolutional Networks. Noise Vib. Control 2023, 43, 101. [Google Scholar]
- Zhang, F.; Jin, Q.; Li, D.; Zhang, Y.; Zhu, Q. Physical Graph-Based Spatiotemporal Fusion Approach for Process Fault Diagnosis. ACS Omega 2024, 9, 9486–9502. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Multilayer neurocontrol of high-order uncertain nonlinear systems with active disturbance rejection. Int. J. Robust Nonlinear Control 2024, 34, 2972–2987. [Google Scholar] [CrossRef]
- Yang, G. Asymptotic tracking with novel integral robust schemes for mismatched uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2023, 33, 1988–2002. [Google Scholar] [CrossRef]
- Schörkhuber, C.; Klapuri, A. Constant-Q transform toolbox for music processing. In Proceedings of the 7th Sound and Music Computing Conference, Barcelona, Spain, 21–24 July 2010; pp. 3–64. [Google Scholar]
- Zhang, W.; Yan, L.; Zhang, Q.; Gao, J. Graph modeling for vocal melody extraction from polyphonic music. Appl. Acoust. 2023, 211, 109491. [Google Scholar] [CrossRef]
- Yang, Y. An evaluation of statistical approaches to text categorization. Inf. Retr. 1999, 1, 69–90. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Apparatus | Version | Producer | Sensitivity |
|---|---|---|---|
| Single-axis accelerometer | 333B30 | PCB | 10.11 mV/(m/s2) |
| PC | Notebook workstation | Dell | - |
| DAQ system | LMS SCADAS | Siemens | - |
| Software | Testlab | Siemens | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Liao, J.; Zhang, W.; Dai, J.; Huang, C.; Li, H.; Yu, H. Graph Convolutional Network Based on CQT Spectrogram for Bearing Fault Diagnosis. Machines 2024, 12, 179. https://doi.org/10.3390/machines12030179
Yan J, Liao J, Zhang W, Dai J, Huang C, Li H, Yu H. Graph Convolutional Network Based on CQT Spectrogram for Bearing Fault Diagnosis. Machines. 2024; 12(3):179. https://doi.org/10.3390/machines12030179
Chicago/Turabian StyleYan, Jin, Jianbin Liao, Weiwei Zhang, Jinliang Dai, Chaoming Huang, Hanlin Li, and Hongliang Yu. 2024. "Graph Convolutional Network Based on CQT Spectrogram for Bearing Fault Diagnosis" Machines 12, no. 3: 179. https://doi.org/10.3390/machines12030179
APA StyleYan, J., Liao, J., Zhang, W., Dai, J., Huang, C., Li, H., & Yu, H. (2024). Graph Convolutional Network Based on CQT Spectrogram for Bearing Fault Diagnosis. Machines, 12(3), 179. https://doi.org/10.3390/machines12030179