
Design of Electronic Filter for Noise and Vibration Reduction in Brushed DC Motor

Abstract
1. Introduction
2. Modeling a Brushed DC Motor
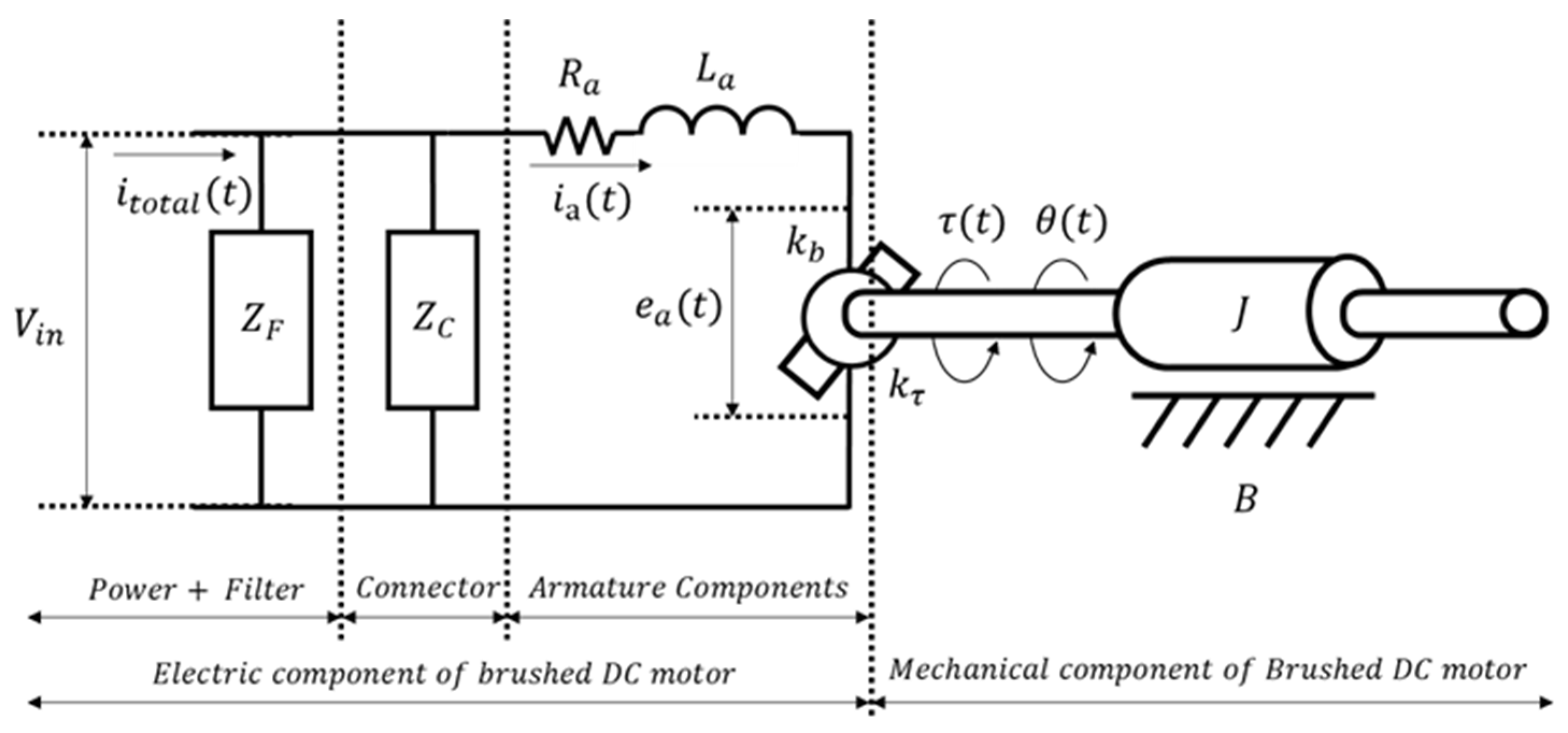
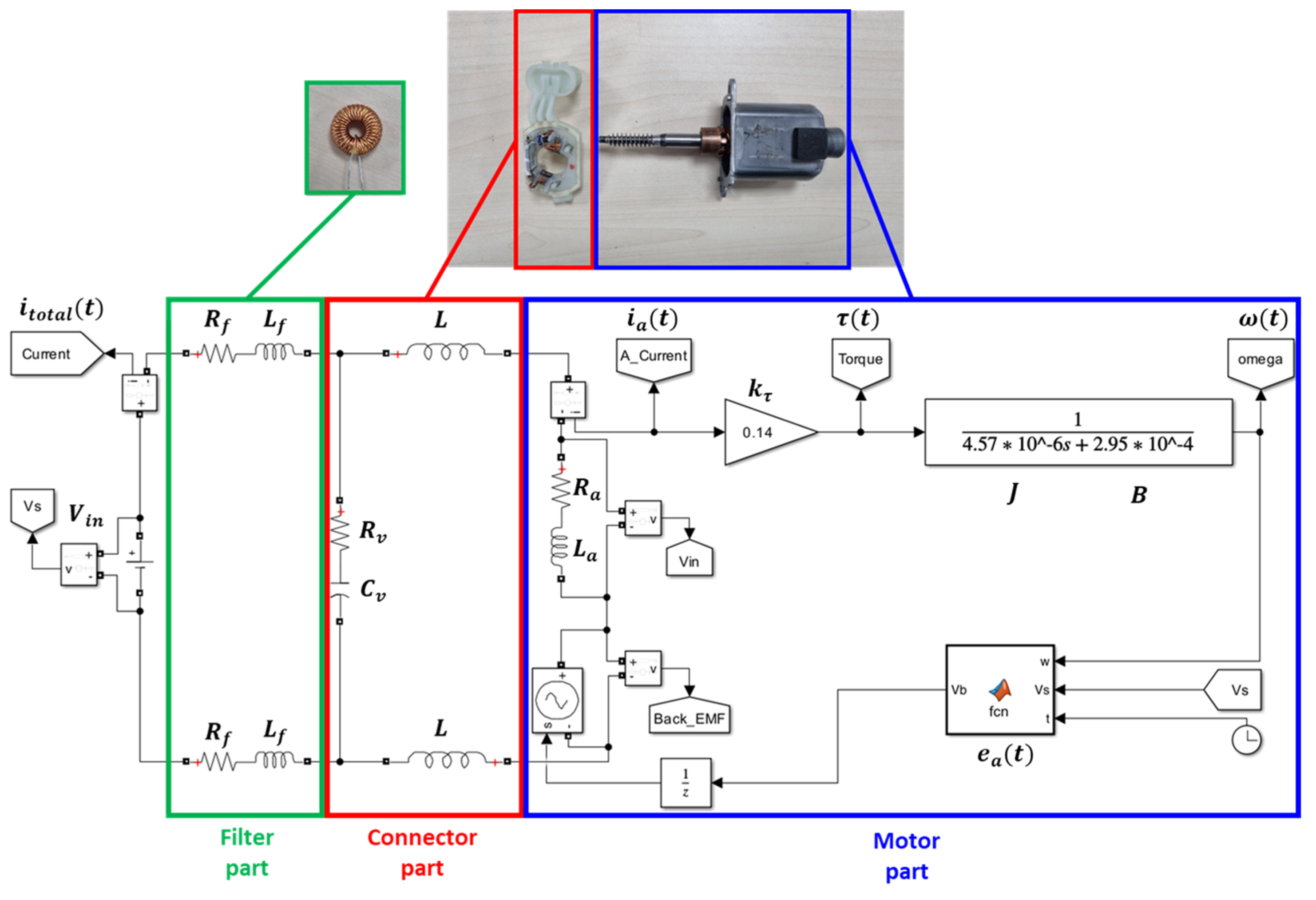
2.1. Brushed DC Motor Modeling including Connector and Filter
2.2. Motor Parameter Measurement
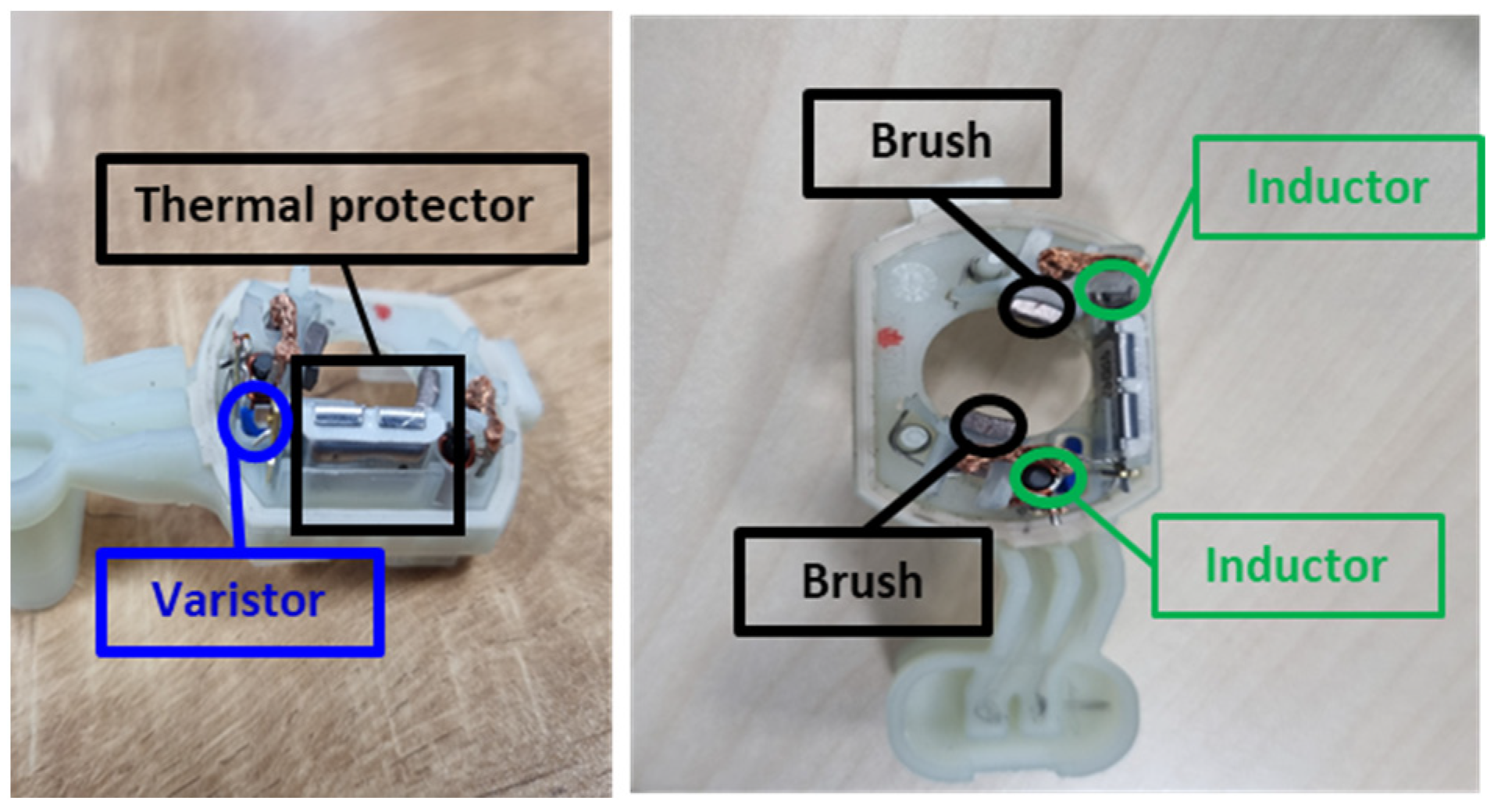
2.2.1. Motor Connector
2.2.2. Motor Inertia
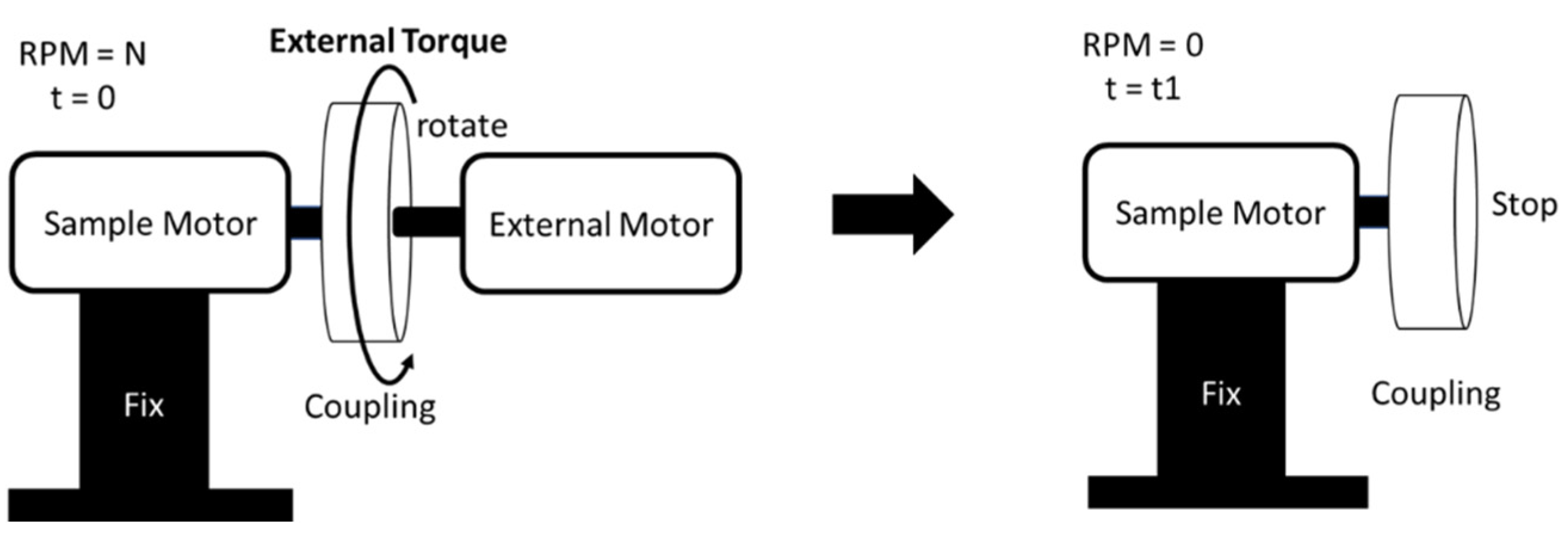
2.2.3. Motor Friction
2.2.4. Motor Resistance
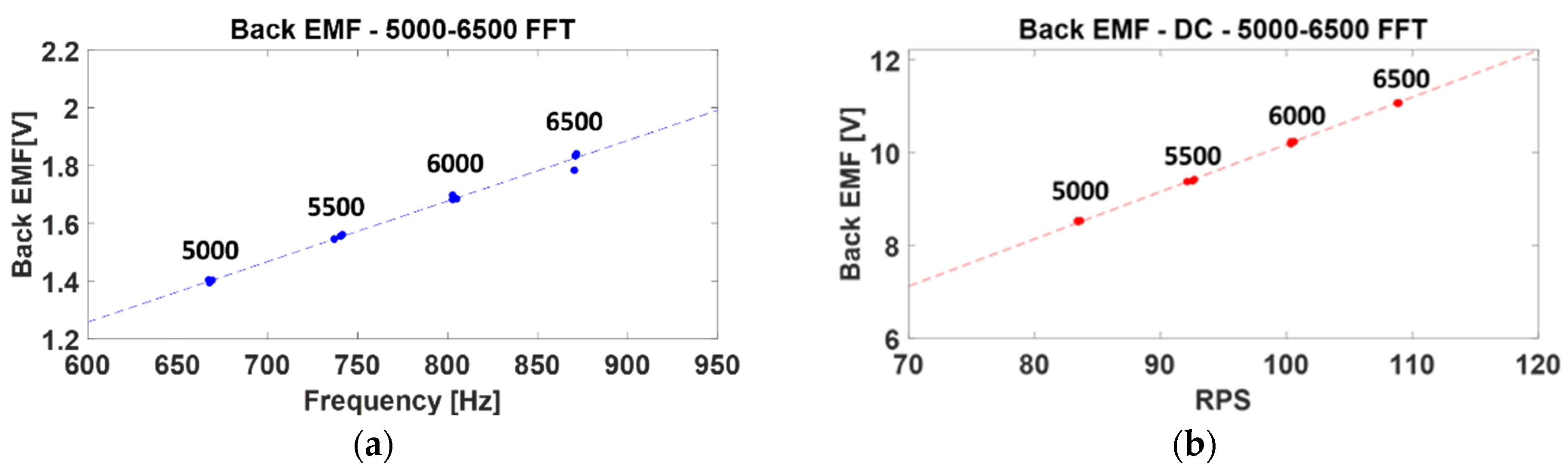
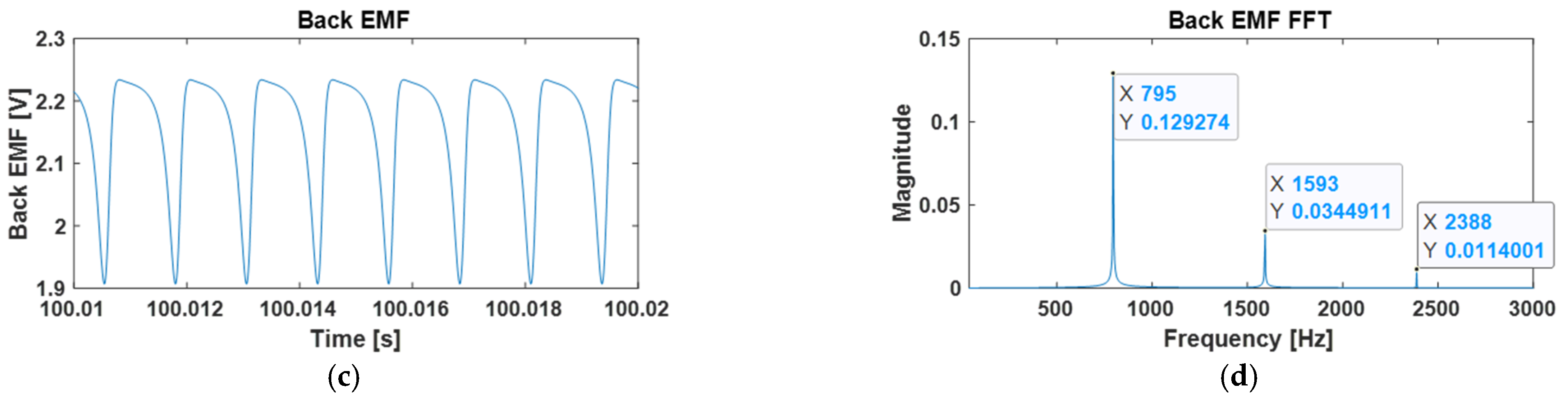
2.2.5. Motor back EMF
2.3. Motor Parameter Estimation
2.3.1. Estimation Method for Motor Torque Constant and Armature Inductance
2.3.2. Estimation Results
2.4. Model Convergence Errors and Resolution
2.5. Model Validation
3. Designing Electronic Filters for Motor Noise and Vibration Reduction Using a Model
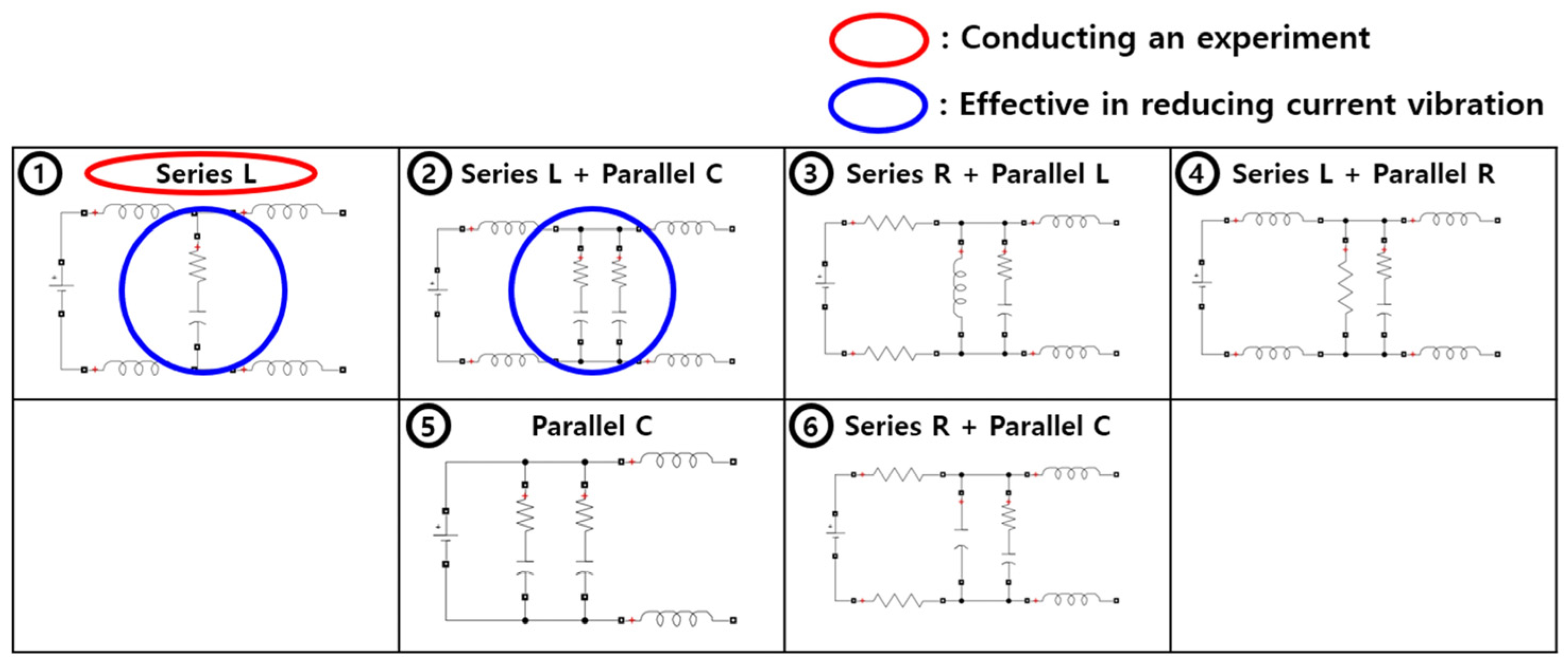
3.1. Case Study of Electronic Filter for Current Reduction Effect
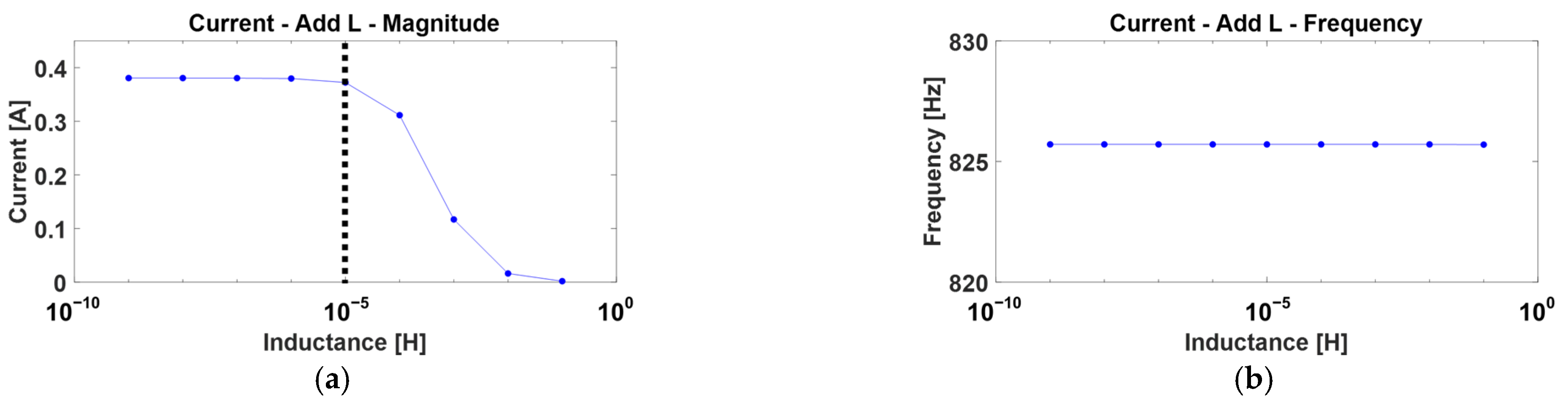
3.2. Simulation Results When Adding Series L
3.3. Experiment for Filter Effect Verification
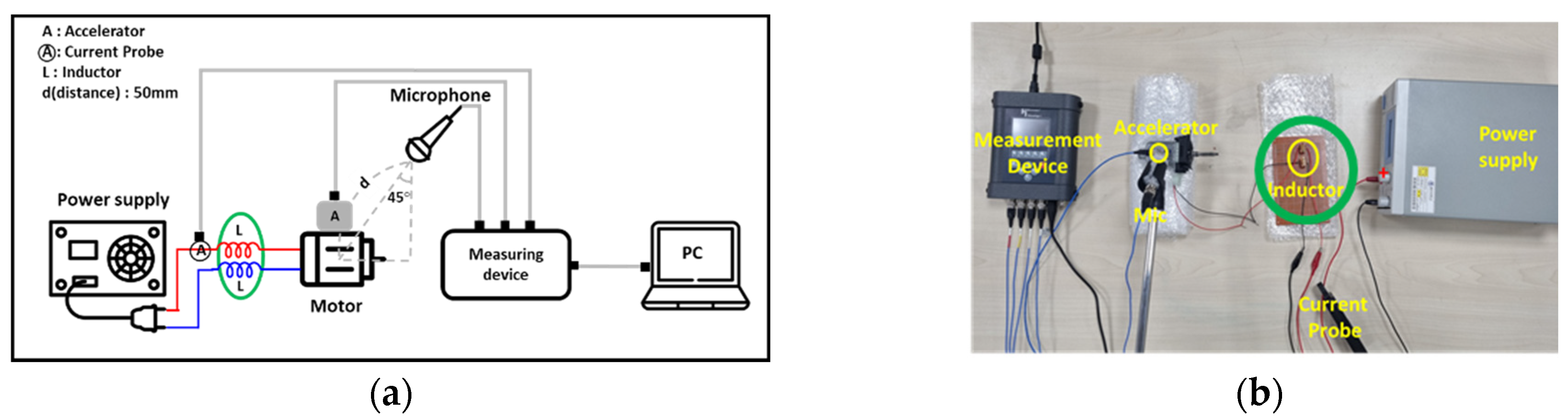
3.3.1. Experimental Schematic and Environment
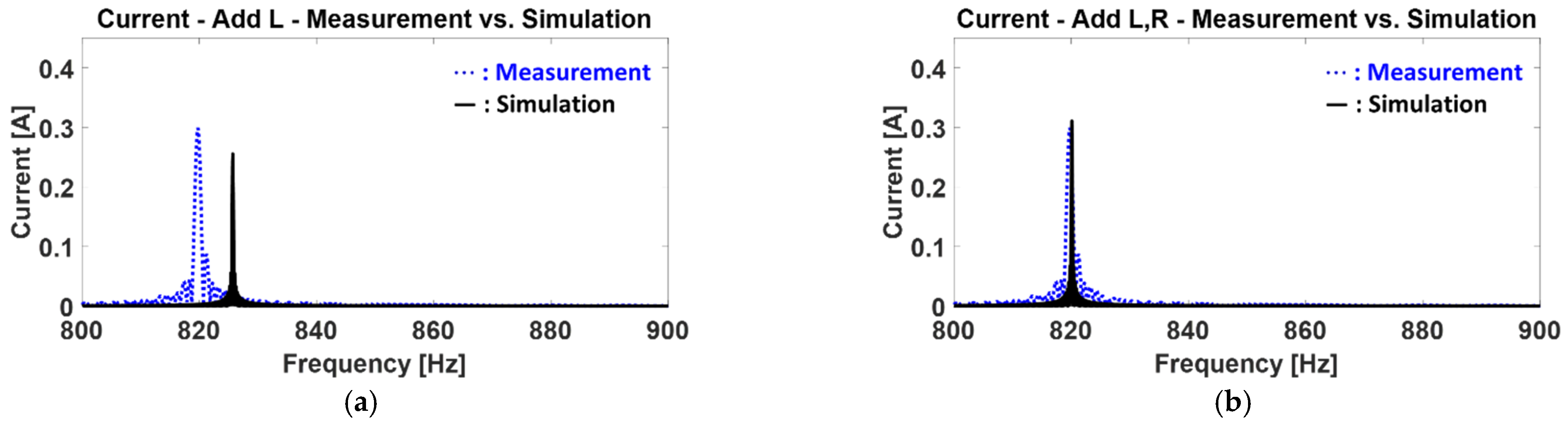
3.3.2. Comparison with Experimental Results and Simulations
3.3.3. Verification of the Filter Effect
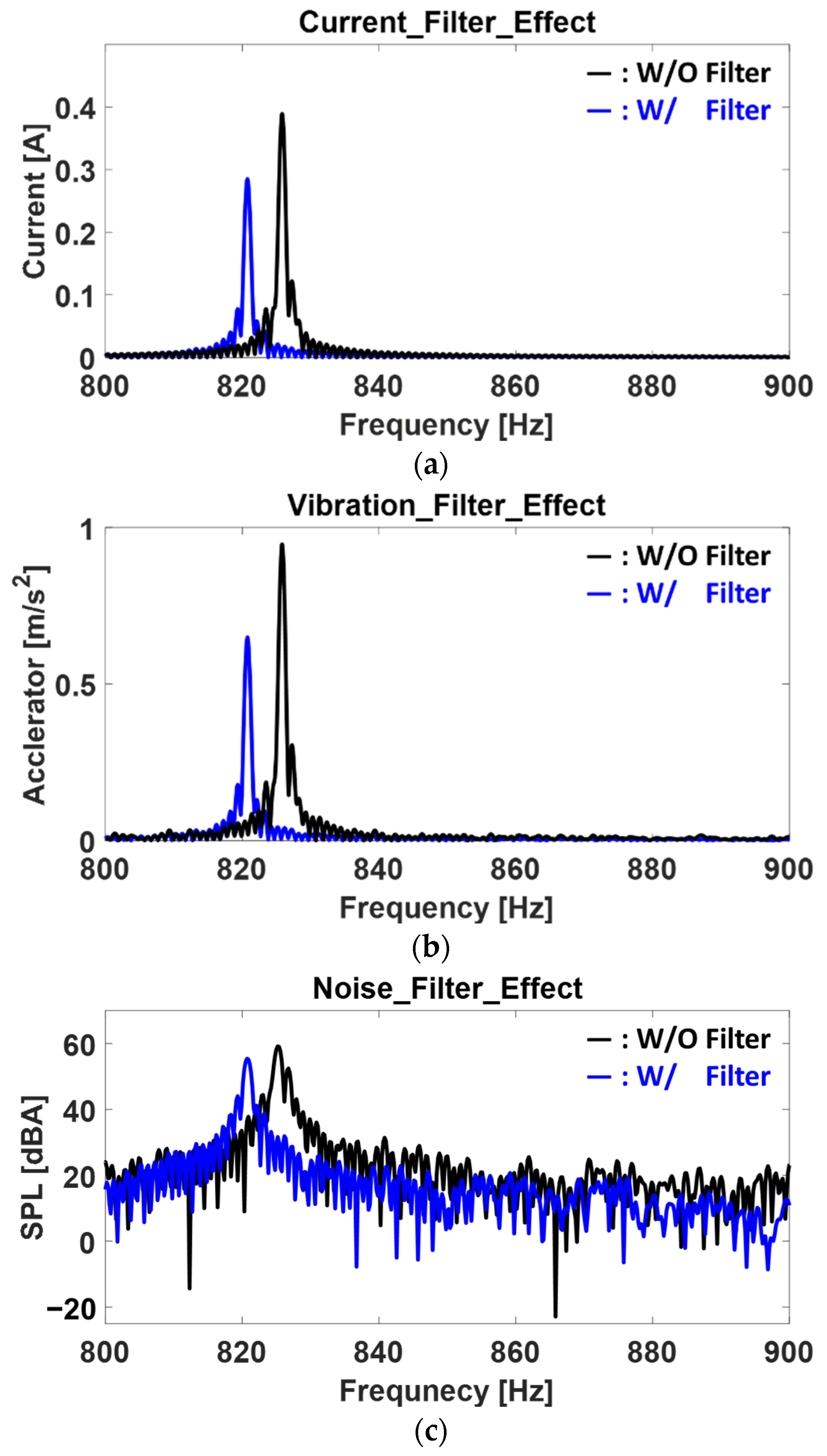
3.4. Verification of Noise and Vibration Reduction Effects
4. Conclusions
- The inductor and varistor in the motor connector were determined by using the formula for rod core inductance or the values provided by the manufacturer’s datasheet. For the varistor, its resistance and capacitance were applied to the model in series connection. The inertia and friction within the motor were measured using an experimental method based on dynamic equations. The back EMF containing the vibration components of the motor was measured at various operating points, linearly interpolated, expressed as a first-order function, and applied to the model. The internal inductance and torque constants, which are challenging to measure directly, were estimated by comparing the measured current and RPM of the experimental motor with the interpreted values.
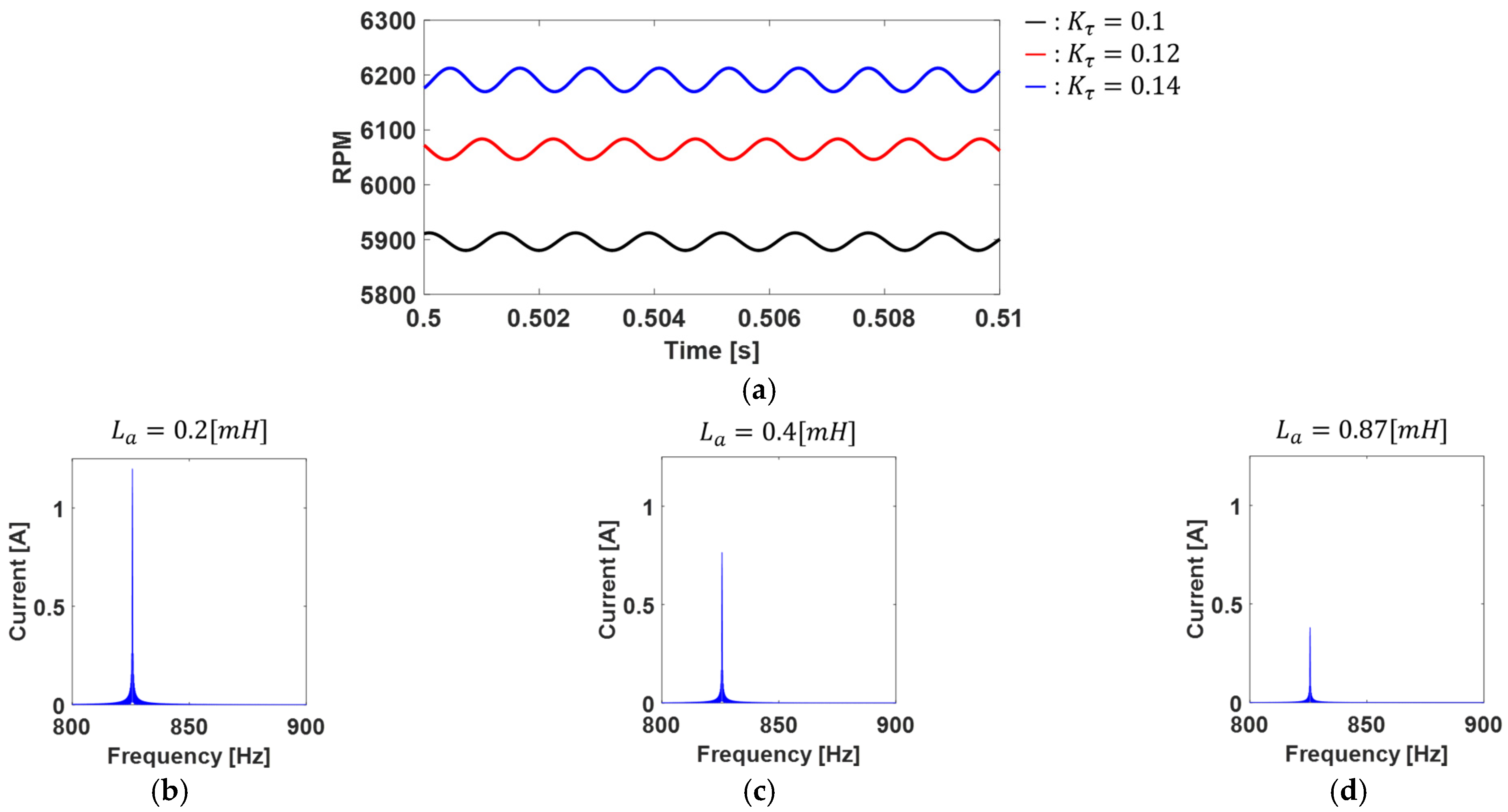
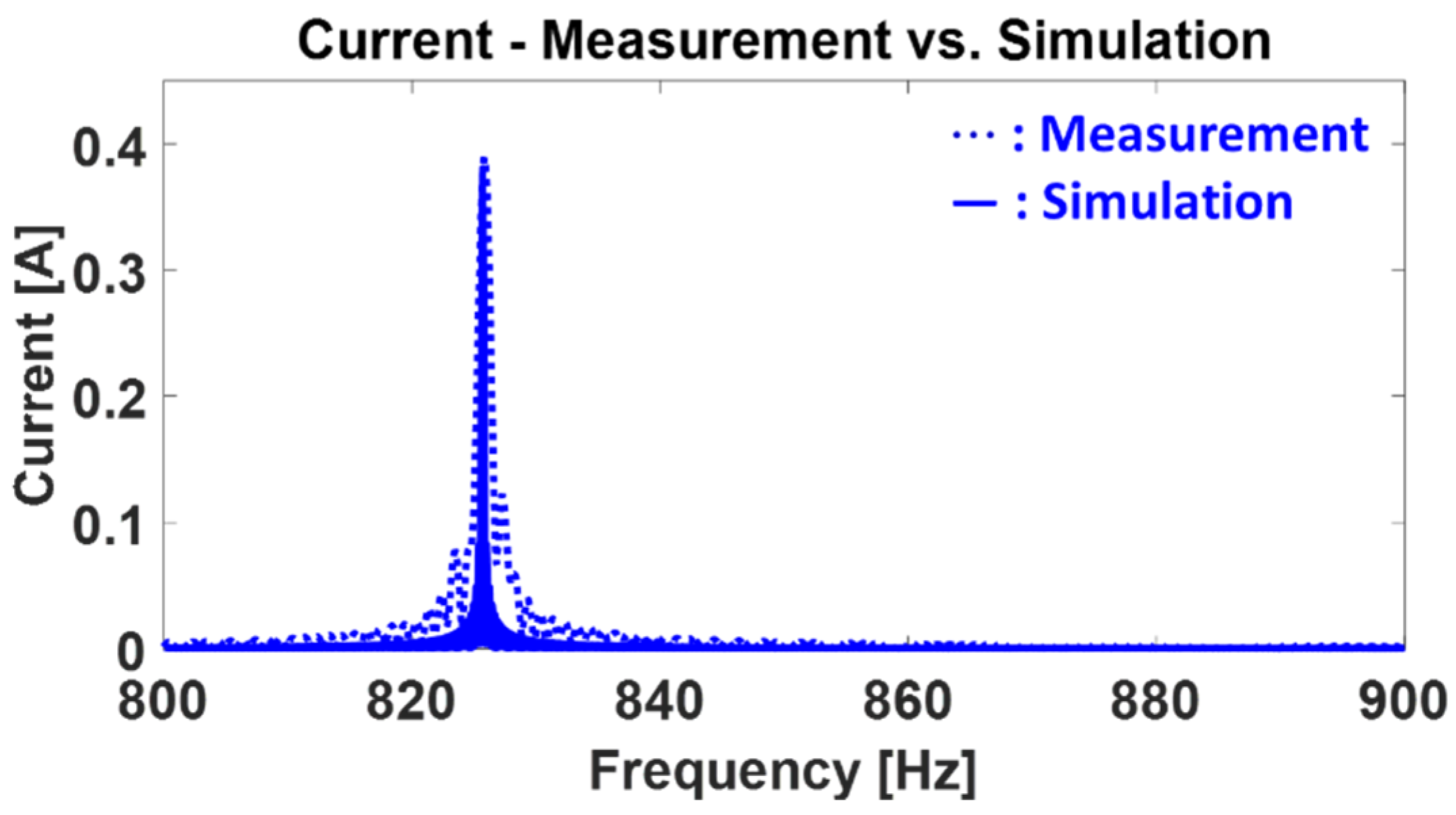
- It was observed that the model did not converge even after a sufficient amount of time, and this was found to be due to the feedback loop within the model. To address this, the model was made to converge by including only the DC component of the back EMF, and the angular velocity at that point was determined. The obtained angular velocity was then applied to the back EMF term to ensure the convergence of the model. The model was validated by confirming the comparison of the experimental results of the current oscillation component with the simulation results.
- During the case study using the model, the effect of reducing current oscillations by connecting an inductor in series between the power supply and the motor was observed. For accurate interpretation and experimental comparison, a small resistance within the inductor was added to the model. As a result, the reduction in the current oscillation component was confirmed during both interpretation and experimentation, demonstrating consistency between the two. Furthermore, the effective reduction in motor noise and vibration due to the decrease in the current oscillation component was observed through experiments.
- By utilizing the completed motor model, it is possible to reduce motor noise and vibration by simply attaching a filter without altering the internal structure of the motor. Therefore, filters can be added to already produced motors to mitigate noise and vibration. Additionally, situations where the motor experiences load can be considered. By incorporating an increase in torque due to the load into the model, changes in current caused by the load can be examined. Consequently, it is anticipated that optimizing the filter can be achieved by appropriately adjusting the filter variables in response to load variations.
- BDC motors are widely utilized due to their affordability. However, incorporating the designed filter would result in additional expenses, potentially reducing the motor’s price competitiveness. Therefore, there is a limitation in deciding whether to use the filter, as it depends on a consideration of the motor’s price.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element Name | Symbol | Unit |
|---|---|---|
| Mass of the rotating body | ||
| Gravitational acceleration | ||
| Height of the incline | ] | |
| Length of the incline | ] | |
| Velocity of the rotating body | ] | |
| Moment of inertia of the rotating body | J | ] |
| Time in motion | ] | |
| Angle of the rotating body | ] | |
| Acceleration of the rotating body | ] | |
| Outermost radius of the rotating body | ] |
Appendix B
References
- Qian, K.; Hou, Z.; Sun, D. Sound Quality Estimation of Electric Vehicles Based on GA-BP Artificial Neural Networks. Appl. Sci. 2020, 10, 5567. [Google Scholar] [CrossRef]
- Hua, X.; Thomas, A.; Shultis, K. Recent Progress in Battery Electric Vehicle Noise, Vibration, and Harshness. Sci. Prog. 2021, 104, 1. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.B.; Ho, S.L.; Fu, W.N.; Xue, B.F. Analysis and Solution on Squeak Noise of Small Permanent-Magnet DC Brush Motors in Variable Speed Applications. IEEE Trans. Magn. 2009, 45, 4752–4755. [Google Scholar] [CrossRef]
- Knezevic, J.M. Low-Cost Low-Resolution Sensorless Positioning of DC Motor Drives for Vehicle Auxiliary Applications. IEEE Trans. Veh. Technol. 2013, 62, 4328–4335. [Google Scholar] [CrossRef]
- Kang, G.-H.; Son, Y.-D.; Kim, G.-T. The Noise and Vibration Analysis of BLDC Motor Due to Asymmetrical Permanent Magnet Overhang Effects. In Proceedings of the 2007 IEEE Industry Applications Annual Metting, New Orleans, LA, USA, 23–27 September 2007; pp. 1030–1537. [Google Scholar] [CrossRef]
- Saed, N.; Leitner, S.; Krall, F.; Muetze, A. Noise and Vibration Characteristics of Sub-Fractional Horsepower Single-Phase BLDC Drives. Elektrotech. Informationstech. 2022, 139, 260–270. [Google Scholar] [CrossRef]
- Hur, J.; Reu, J.W.; Kim, B.W.; Kang, G.H. Vibration Reduction of IPM-Type BLDC Motor Using Negative Third Harmonic Elimination Method of Air-Gap Flux Density. IEEE Trans. Ind. Appl. 2011, 47, 1300–1309. [Google Scholar] [CrossRef]
- Jafarboland, M.; Farahabadi, H.B. Optimum Design of the Stator Parameters for Noise and Vibration Reduction in BLDC Motor. IET Electr. Power Appl. 2018, 12, 1297–1305. [Google Scholar] [CrossRef]
- Kang, H. The Study of DC Motor Noise and Vibration. SAE Trans. 1995, 104, 2461–2467. [Google Scholar] [CrossRef]
- Jung, I.; Yang, H.; Park, T.; Kim, J. A Study on Noise Reduction of a DC Motor. In Proceedings of the Korean Society for Noise and Vibration Engineering Conference, Gyeongju, Republic of Korea, 29–31 October 2004; Volume 5, pp. 764–769. [Google Scholar]
- Wang, S.; Hong, J.; Sun, Y.; Shen, J.; Cao, H.; Yang, Z. Analysis and Experimental Verification of Electromagnetic Vibration Mode of PM Brush DC Motors. IEEE Trans. Energy Convers. 2018, 33, 1411–1421. [Google Scholar] [CrossRef]
- Cho, Y.T. Characterizing Sources of Small DC Motor Noise and Vibration. Micromachines 2018, 9, 84. [Google Scholar] [CrossRef] [PubMed]
- Hong, J.; Wang, S.; Sun, Y.; Cao, H. An Effective Method with Copper Ring for Vibration Reduction in Permanent Magnet Brush DC Motors. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Wang, S.; Yang, Z.; Liu, C. Vibration Reduction Characteristics of Permanent Magnet DC Motors with Sawtooth Edge Poles. IEEE Trans. Energy Convers. 2021, 36, 737–745. [Google Scholar] [CrossRef]
- Hong, J.; Wang, S.; Sun, Y.; Cao, H. A PM Pole with Axial Varied Width for Vibration Mitigation in PM Brush DC Motors. IEEE Trans. Ind. Electron. 2019, 66, 3595–3604. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Cao, H. Analysis and Reduction of Electromagnetic Vibration of PM Brush DC Motors. IEEE Trans. Ind. Appl. 2019, 55, 4605–4612. [Google Scholar] [CrossRef]
- Cavagnino, A.; Saied, S.; Vaschetto, S. Experimental Identification and Reduction of Acoustic Noise in Small Brushed DC Motors. IEEE Trans. Ind. Appl. 2014, 50, 317–326. [Google Scholar] [CrossRef]
- Lee, D.H.; Lee, J.H.; Ahn, J.W. Mechanical Vibration Reduction Control of Two-Mass Permanent Magnet Synchronous Motor Using Adaptive Notch Filter with Fast Fourier Transform Analysis. IET Electr. Power Appl. 2012, 6, 455–461. [Google Scholar] [CrossRef]
- Shami, U.T.; Khan, M.U.; Burhan Khan, M.; Rizvi, T.H.; Khalid, A. A New method for the proposal of acoustic noise reduction in motors. Sci. Int. 2014, 26, 1687–1691. [Google Scholar]
- Ghosh, M.; Ghosh, S.; Saha, P.K.; Panda, G.K. Semi-Analytical Dynamic Model of Permanent-Magnet Direct Current Brushed Motor Considering Slotting Effect, Commutation, and PWM-Operated Terminal Voltage. IEEE Trans. Ind. Electron. 2017, 64, 2654–2662. [Google Scholar] [CrossRef]
- Vidlak, M.; Makys, P.; Stano, M. Comparison between Model Based and Non-Model Based Sensorless Methods of Brushed DC Motor. In Transportation Research Procedia; Elsevier: Amsterdam, The Netherlands, 2021; Volume 55, pp. 911–918. [Google Scholar]
- Scott, J.; McLeish, J.; Round, W.H. Speed Control with Low Armature Loss for Very Small Sensorless Brushed DC Motors. IEEE Trans. Ind. Electron. 2009, 56, 1223–1229. [Google Scholar] [CrossRef]
- Kim, H.; Kim, J.; Han, K.; Won, D. 1D Modeling Considering Noise and Vibration of Vehicle Window Brushed DC Motor. Appl. Sci. 2022, 12, 11405. [Google Scholar] [CrossRef]


| Element Name | Symbol | Unit |
|---|---|---|
| Input voltage | [V] | |
| Input current | [A] | |
| Armature resistance | [ | |
| Armature inductance | [H] | |
| Armature current | [A] | |
| Back EMF | [V] | |
| Motor armature inertia | J | [] |
| Viscous damping, friction coefficient | [] | |
| Motor torque | [] | |
| Motor angular position | [rad] | |
| Motor angular velocity | [rad/s] | |
| Motor torque constant | [] | |
| Motor back EMF constant | [] | |
| Filter impedance | [ | |
| Connector impedance | [ | |
| Connector inductance | [H] | |
| Connector varistor resistance | [] | |
| Connector varistor capacitance | [F] | |
| Filter resistance | [ | |
| Filter inductance | [H] |
| Name | Function |
|---|---|
| DC | |
| 8th order (Magnitude) | |
| Model application |
| Element Name | Symbol | Value | Unit |
|---|---|---|---|
| Input voltage | 12 | [V] | |
| Connector inductance | [H] | ||
| Armature resistance | [ | ||
| Armature inductance | [H] | ||
| Back EMF | function (refer to Table 2) | [V] | |
| Converged angular velocity | 648.5032 | [rad/s] | |
| Motor armature inertia | J | [] | |
| Viscous damping, friction coefficient | [] | ||
| Motor torque constant | [] | ||
| Connector varistor resistance | [] | ||
| Connector varistor capacitance | [F] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Kim, H. Design of Electronic Filter for Noise and Vibration Reduction in Brushed DC Motor. Machines 2024, 12, 148. https://doi.org/10.3390/machines12030148
Kim J, Kim H. Design of Electronic Filter for Noise and Vibration Reduction in Brushed DC Motor. Machines. 2024; 12(3):148. https://doi.org/10.3390/machines12030148
Chicago/Turabian StyleKim, Jiman, and Hyunsu Kim. 2024. "Design of Electronic Filter for Noise and Vibration Reduction in Brushed DC Motor" Machines 12, no. 3: 148. https://doi.org/10.3390/machines12030148
APA StyleKim, J., & Kim, H. (2024). Design of Electronic Filter for Noise and Vibration Reduction in Brushed DC Motor. Machines, 12(3), 148. https://doi.org/10.3390/machines12030148