1. Introduction
In general, there are several devices available for the motion assistance of limbs in rehabilitation therapies following situations that have created motion disabilities such as accidents and pathologies of a physiological and/or neurological nature. Only recently has great attention been paid to limb motion assistance for elderly people without significant motion disabilities. The use of motion assistance also ensures good physiological condition that can prevent subsequent complications in consideration of the fact that a longer life expectancy will require greater physiological and psychological assistance to elderly people. However, the device can be used by users of any age as an exercising (sport-like) device.
Studies like [
1] discuss the benefit of exercise in reducing risk factors and preventing falls and injuries. In this research work, attention is focused on the study of the benefits to local problems in elderly people such as microvascular integrity. In [
2], the authors show that arm exercises with circular movements have a positive effect on endothelium-dependent microvascular activity in the extremities of a healthy older population. On the other hand, research efforts also aim to improve the whole-body movement of elderly people, for example, in [
3], where a robot teacher is proposed to show elderly persons the exercises to be performed.
Current therapies, especially in rehabilitation, are provided in hospitals or therapeutic centers with the assistance of healthcare professionals to provide and assist with exercises with or without motion assistance devices [
4,
5].
Currently, the main focus of research is directed toward patients who have suffered a stroke, with consequent motion disability resulting in intense and continuous rehabilitation activity being required, even for long periods, [
6,
7]. The rehabilitative exercise of the motion capabilities of the limbs is generally carried out with the assistance of healthcare professionals as well as the help of devices which can have a robotic structure, such as systems like in [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18]. In general, these systems are cumbersome and complicated, such that they do not allow for their autonomous use by a patient nor for their use in more comfortable settings such as the home or family environments by patient users, especially elderly ones.
In [
8], the authors present an extensive review considering the fields of application, target groups, types of assistance, mechanical designs, and control strategy procedures. The authors of [
6] demonstrate that training with the mirror-image movement enables the use of the robotic devices and improves the movements of users. The investigation was carried out with people with chronic stroke. Reference [
10] shows a novel interactive telerehabilitation system using an approach from the industrial internet of things (IIoT). In [
11], the authors present a new cable-operated elbow-assisting device with features of portability and user-oriented operation. In [
12], a new robot-assisted bilateral upper limb training strategy is proposed based on the bilateral coordination of users’ upper limbs. In [
13], the authors present design and control aspects for motion rehabilitation of the shoulder complex after cardiovascular accidents. The authors in [
14] propose an adjustable robotic exoskeleton with six degrees of freedom for motion rehabilitation of the shoulder complex. In [
15], the cost of robot-assisted rehabilitation is evaluated for comparison against conventional rehabilitation therapies for upper extremity after a stroke. In [
16], the authors discuss a comprehensive review of robotic solutions for upper extremity rehabilitation. A low-cost device for arm rehabilitation is proposed in [
17] with a game environment for performing exercises at home. [
18] describes the design of a mechanism for upper extremity assistance for both adults and children.
In addition, there are studies specifically focused on detailing existing devices for upper limb rehabilitation. For example, in [
8], there is an extensive review considering several aspects of design and operation features. In [
16], the results are discussed from trials with some of the possible robotic solutions. Telerehabilitation robotic solutions for the whole arm are also the object of investigation and design when considering new technologies such as the internet of things (IoT) [
10] or human–machine relations for the coordination of both arms [
12]. Specific solutions are also proposed for specific applications such as for rehabilitation exclusively for the elbow [
11] or the shoulder [
13,
14]. Robotic arms are also used for the definition of procedures that can address current limitations associated with unsupervised analysis [
19]. In [
20], the researchers report a validation of the effectiveness of home rehabilitation procedures for improving upper limb mobility after a stroke. The comparison of a new guided method with the conventional one, with different elderly members, indicates the increase in effectiveness. A systematic review and meta-analysis of randomized controlled trials are reported in [
21] to evaluate the effectiveness of using VR-supported exercise therapy for upper extremity motor rehabilitation in patients with stroke. In [
22], researchers discuss whether home prehabilitation improves postoperative functional recovery in frail older adults undergoing oncological surgery, but without achieving a final definition of possible results.
In this paper, attention is focused on the design and fabrication of a new device for arm motion exercise. This device is designed with characteristics of portability, adaptability, and low cost, so that it can be used autonomously by a patient user in the home and family environments, mainly for elderly users. The feasibility of the arm motion assistance device is presented through a laboratory prototype whose characteristics meet the above requirements.
2. Materials and Methods
The motion assistance of an arm is proposed through a sensorized crank that can be adapted to the needs of a patient user in terms of movement guidance, with action implementation by a servomotor or by the user’s own arm. The device responds to the both physiological and technological requirements which are discussed below to explain the materials and methodologies that have defined its structure and functionality.
2.1. The Problem and Its Requirements
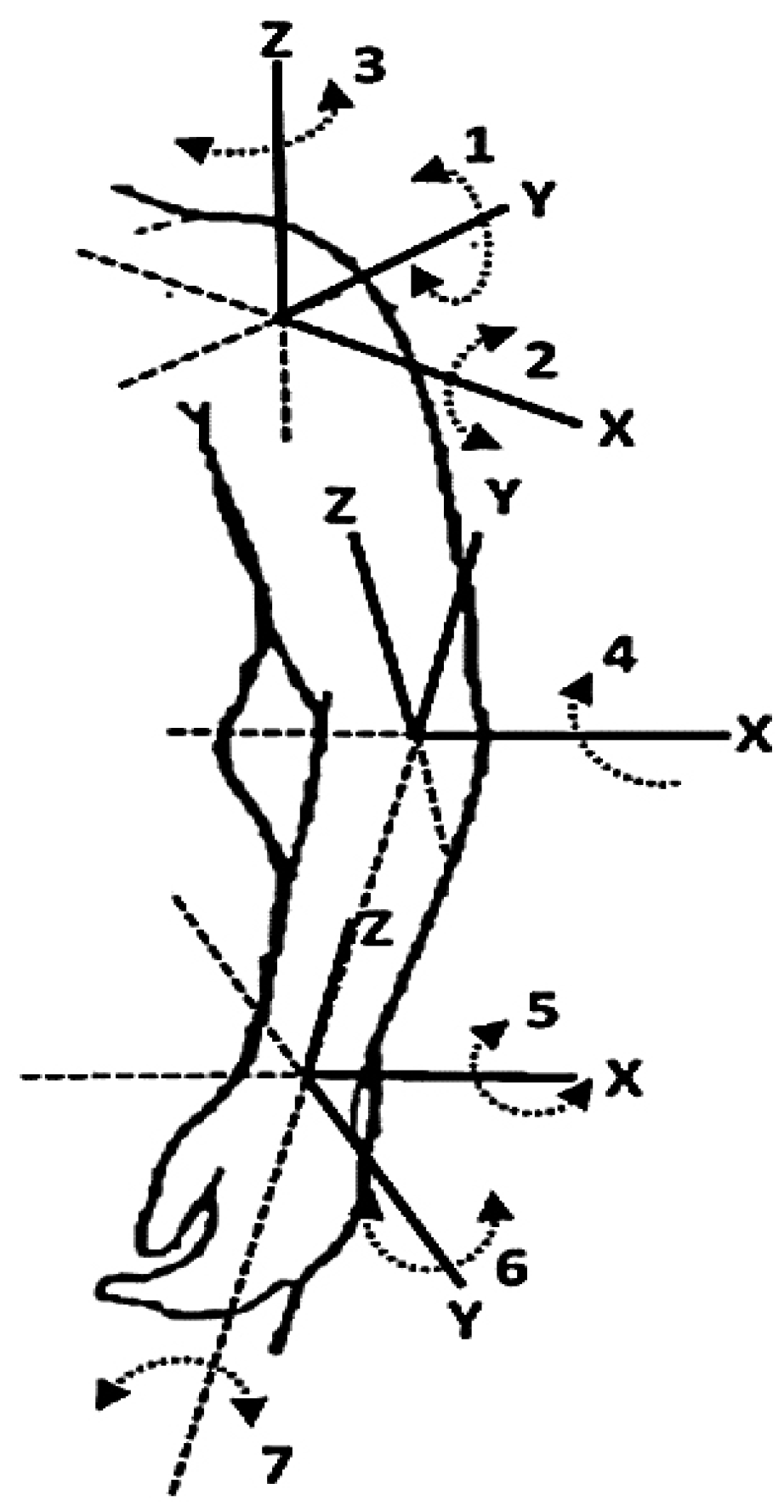
An arm is composed of the shoulder, arm, elbow, forearm, and hand, with specific musculoskeletal structures of the human arm showing a total of 7 degrees of freedom (DOFs), [
23]. All of those structures with specific features contribute to the muscle–skeleton complex that is the target of motion therapies through suitable exercises The movements involved in those exercises refer to the typical movements of the upper limb that can be identified as flexion–extension (F-E), intra–extra rotation (I-E), abduction–adduction (A-A), and pronation–supination (P-S). Arm articulations refer to the shoulder joint, the elbow joint, and the wrist joint, as shown in
Figure 1. The shoulder articulation moves around the axes 1 (A-A), 2 (F-E), and 3 (I-E) [
19]. The elbow articulation moves around axis 4 (F-E). The wrist articulation moves around axes 5 (F-E), 6 (A-A), and 7 (P-S), whereas movement around 7 is also for movement of the forearm.
Table 1 lists the average values of motion range in those typical arm movements as reference data for the assisted motion exercises.
Motion-assisted exercises of the arm are therefore specifically programmed both for each articulation and for the entire arm in order to maintain or recover the range of mobility of a healthy physiological condition.
Three methods of arm weight compensation for guided exercises are discussed in [
24]. In addition, in [
24], the authors report that each subject’s different anatomical and physiological predispositions affect the signals detected by surface electrodes. Despite the variability between studied subjects, no significant interaction was found between the weight compensation method and the user’s pose. Thus, for the use of the device proposed in this paper, the patient’s anthropometric values are taken into account to make necessary adjustments to the device.
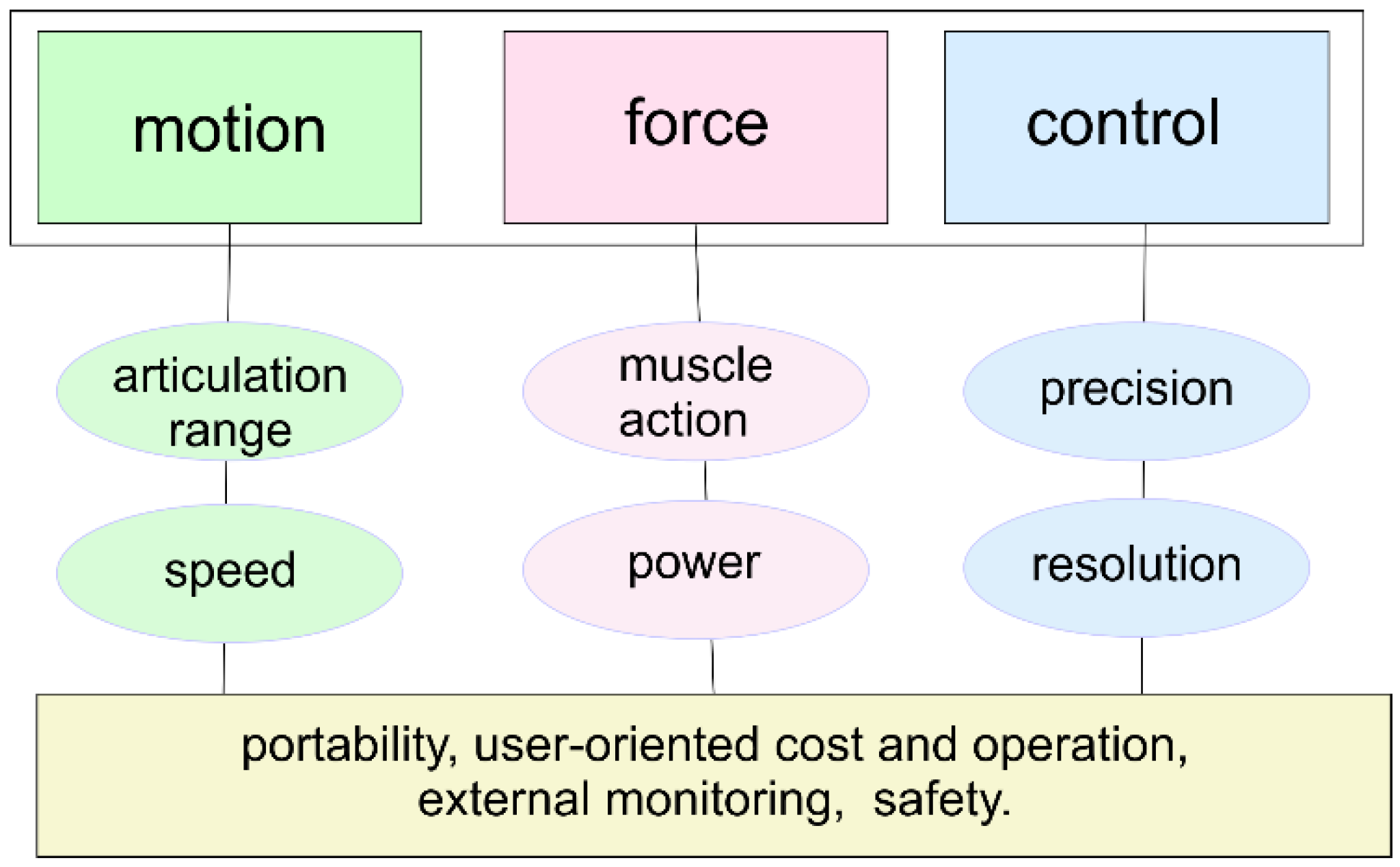
This motion assistance activity involves not only physiological aspects in terms of movement and strength, which need to be solicited to guide the arm, but also psychological aspects, especially in elderly people and in those undergoing rehabilitation, since the poor state of health can also produce a type of psychological weakness.
Figure 2 aims to summarize this interdependence of the physiological and psychological aspects that must be taken into consideration when planning motion exercise and mainly when developing devices that can help for this purpose. In the scheme of
Figure 2, the area of control has also been indicated as sensoriality which, indeed, completes the physiological state for awareness of the condition of a motion exercise, with effects of greater stimulation and satisfaction of the exercising person. Particularly for elderly people, who suffer from a reduction in their physiological motion and strength capabilities, together with a reduction in sensoriality, this implication along with the person’s psychology turns out to be fundamental in planning motion exercises that can give benefits to the entire state of health of a person.
Figure 2 also indicates areas of priority in terms of the requirements and characteristics of motion exercise that a motion assistance device, especially concerning to the arm, must consider in its structure and functionality. In particular, in terms of movement, the recovery of the range of motion of the articulations as well as the speed of movement is fundamental. In terms of muscular strength, the priority aspect can be considered the aspect of muscular action to be maintained or recovered, together with a capacity for muscular power. In terms of sensoriality and control, a motion exercise must be able to guide and stimulate the precision of movement for the recovery of even small movements.
These requirements can be formulated by combining the aspects that a motion-assisting device must satisfy, as outlined again in
Figure 2, especially referring to the portability of the device for adequate functionality so it is suitable for autonomous use by a user, thus providing the possibility of its use in the home and family environments. Furthermore, monitoring motion exercises may be important not only for conscious use by a user but also for supervision by healthcare professionals, both remotely and in the form of periodic checks, thus requiring adequate sensorization of the device. Finally,
Figure 2 also highlights the need for safety of the device both in terms of functionality for users and in medical terms, such as sanitization and hygienic conditions. All of these considerations, therefore, can be summarized in the design requirements for compactness, lightness, and ease of use of the device in a safe workspace.
2.2. Prototype Design
Figure 3 presents the conceptual solution that was designed for a motion-assisting system for human arms in consideration of what has been outlined above and with reference to the aspects summarized in
Figure 2. The designed structure contains well-defined and localized elements that are based on a sensorized crank that can be easily used in motion exercises, with effective sensors for monitoring the movement and the actions. Portability is ensured by a frame which also contains electronic components for control and data acquisition, and is designed with an easy-to-maneuver geometry equipped with small fins that can attach securely to available work surfaces. The mechanical design of the device has been fabricated considering the requirements presented in
Figure 2, and a conceptual design is proposed in
Figure 3 and
Figure 4. The dimensions were chosen for the rotating crank considering the average size of an adult, obtaining the link size of 30 cm, and for the cubic frame, considering home general furniture to obtain the cube size of 40 × 40 × 40 cm with a total weight of less than 20 N.
The crank is the main element of motion assistance which, equipped with a knob, allows the user to guide their arm in accordance with the rotation movement of the crank in a range suited to their physiological condition. The rotation can be limited or extended depending on the conditions and possibilities of motion thanks to the structure and mobility of the crank specifically chosen as the structural and functional elements of the device. The crank is equipped with a servomotor which can function as a motor for fully active guidance of the arm, but which can also be used as a dynamo when the arm has the necessary muscular power for the guided movement to benefit the limbs and their articulations. The sensorization is designed at the minimum level of components in favor of device simplicity and reliability in terms of an inertial measurement unit (IMU) with adequate miniaturization which can be installed on the extreme part of the crank or even inside the knob, and a sensor of force (FS) that can capture the user’s effort when following the motion of the crank. Also, a current sensor (CS) can be useful to both control the servitor and the user’s efforts. Complementary components of an electronic nature are included for the management of the servomotor with a controlled and regulated motion and for the acquisition and processing of the data that are acquired by the sensors during motion exercises. With this conceptual solution, it is possible to imagine designing a motion-assisting device for arm exercises whose main characteristics can be summarized by limited dimensions: a cubic area of approximately 60 × 60 × 60 cm with a weight of less than 2 kg for an operation that can consume a power of approximately 200 W, providing both battery and direct power supply from the available electric network. Therefore, it can also be expected that this device will be made of commercial components and parts produced with 3D-printed manufacturing that can ensure a low cost of less than EUR 60. The reported prototype was built with rods and mechanical parts costing EUR 10, 3D printing material costing EUR 5, a knob at EUR 10, a servomotor at EUR 15, sensors (IMU and force sensors) costing EUR 5, and electronics for the control unit and data acquisition costing EUR 10.
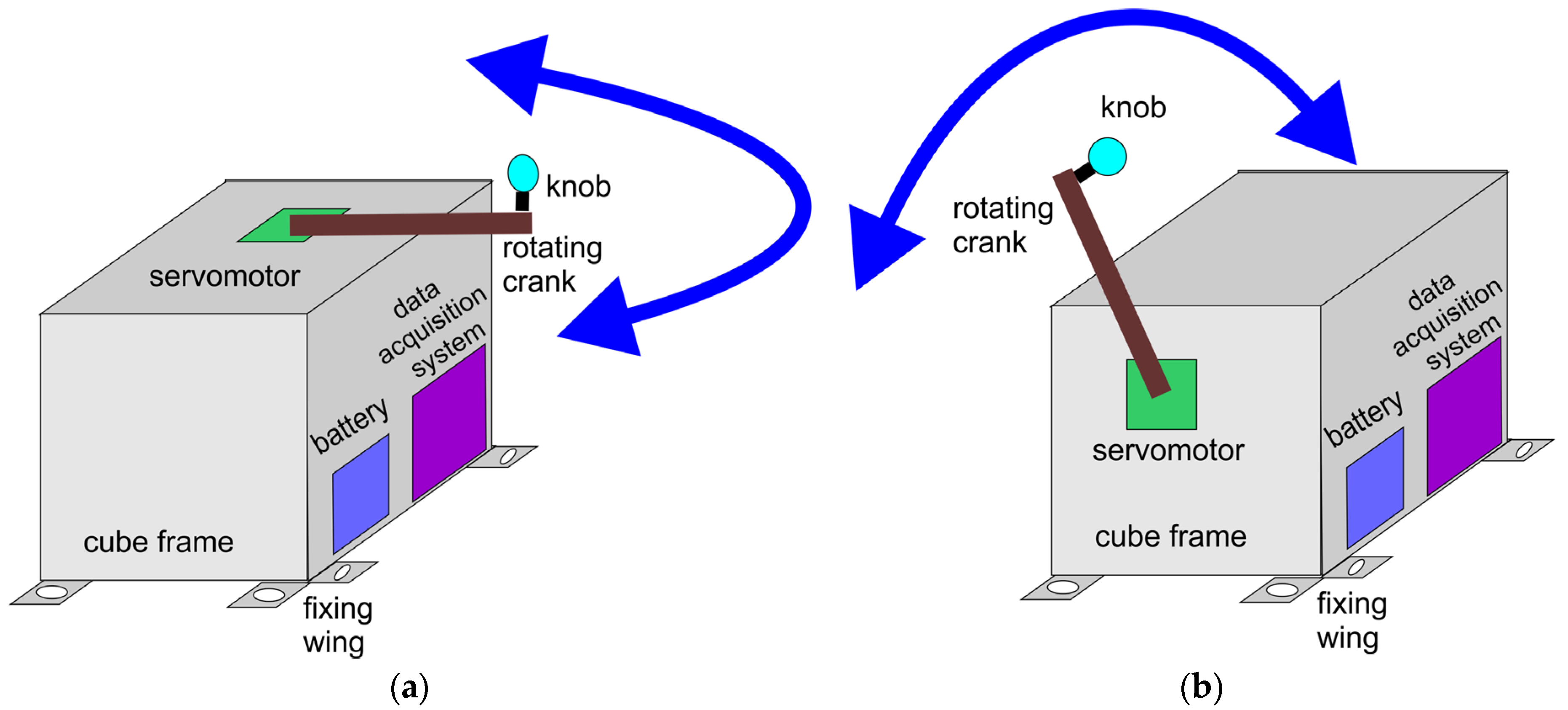
Figure 4 shows the CAD design of the conceptual idea in
Figure 3 in the two possible configurations of use, referring to the motion of the crank on a horizontal plane and on a vertical plane, respectively, as required in general therapies and exercise methods for the mobility of a human arm with all of its articulations. It can be noted that the configuration of the device also allows the motion exercise to be centered on a specific articulation such as, for example, that of the elbow or that of the shoulder. The frame body is designed not only for the purpose of placing the sensorized crank adequately in the space but also to allow for easy fixing of the device via its wings to a work surface, either with screws or with simple jaws. In addition, the frame body houses the electronic components for data acquisition and the power supply of the sensors and servomotor from a battery or connection to the electricity network.
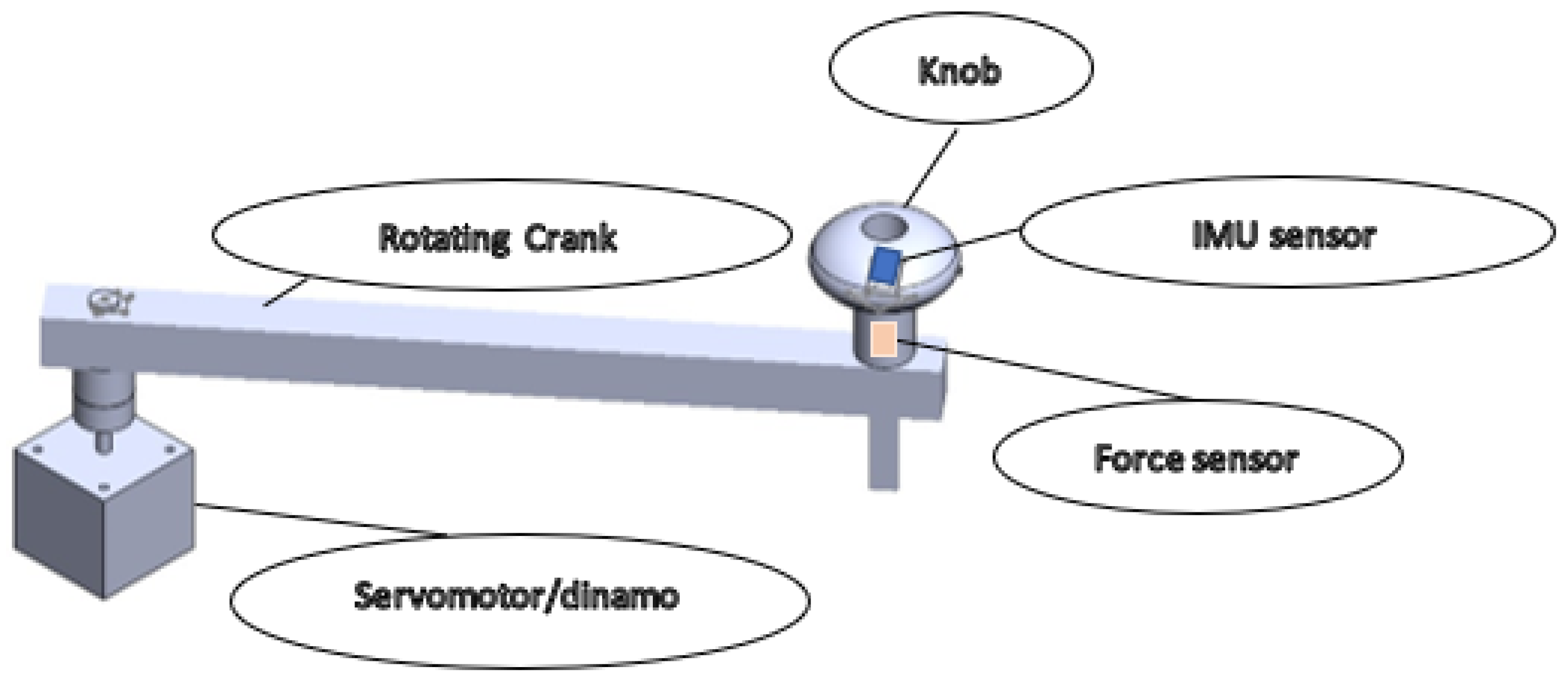
Figure 5 shows in detail the structure and components of the sensorized crank in
Figure 3 as the central and functional element of the arm motion-assisting device. The geometry of the crank is designed with appropriate dimensions to allow for easy rotation by the arm of an adult user with a knob that is designed to allow for easy gripping of the end of the crank for its movement. The sensing of the movement of the crank is obtained by an IMU motion sensor which can be installed inside the cavity of the knob but also in the lower face of the end of the crank. A current sensor on the servomotor is used to monitor the energy delivered or received during motion. Furthermore, a specific force sensor is installed on the knob axis to measure the force that a user exerts on the knob during an exercise whilst moving the crank. Therefore, as also represented by the CAD diagram in
Figure 5, the structural unit of the sensorized crank appears to be a separate element which can also be adapted to different configurations with different frame bodies.
Portability is ensured by the light and compact structure. Thanks to the modular design, the cubic frame and the rotating crank are easily assembled. The overall weight is about 20 N and the overall encumbrance is within a volume of 100 × 100 × 100 cm. Home usability is also ensured by an easy setup thanks to the fixing wings at the base of the cube frame that allow for secure attachment, through screws or clamps, to any table in a domestic environment. This simple but strong fixture allows the device to be removed and stored in a compact space once the exercise is finished until the next use. The dimensions and other design parameters for the device have been selected considering the average size of human users and their arms, with adjustments to ensure comfortable rotation of the crank by a user standing or seated near the cubic frame once properly installed. The feasibility of the operation configuration in terms of workspace fitting has been checked by laboratory trials, such as the test reported by one of the authors.
3. Results and Discussion
This section is divided by subheadings. It should provide a concise and precise description of the experimental results, their interpretation, as well as the experimental conclusions that can be drawn.
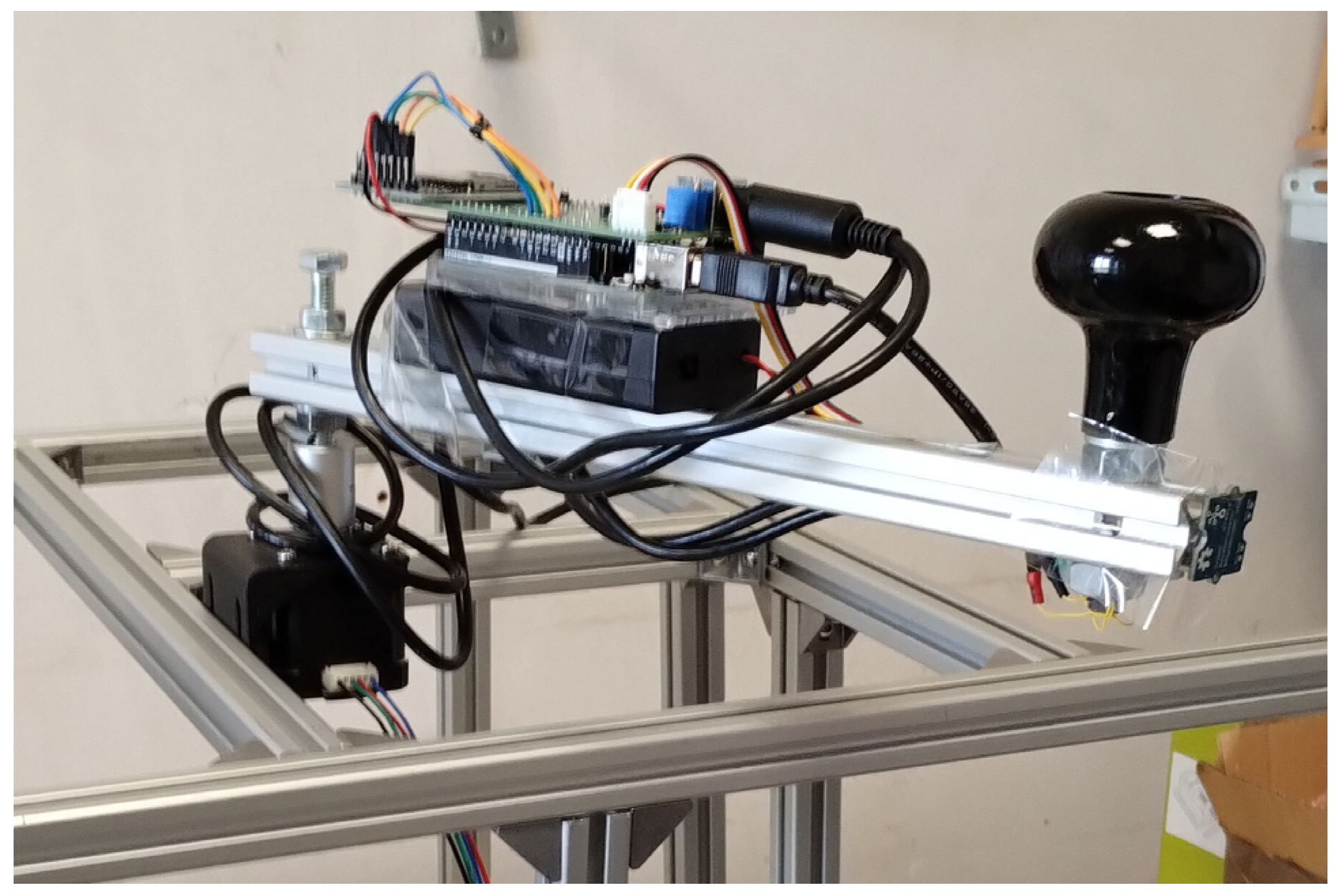
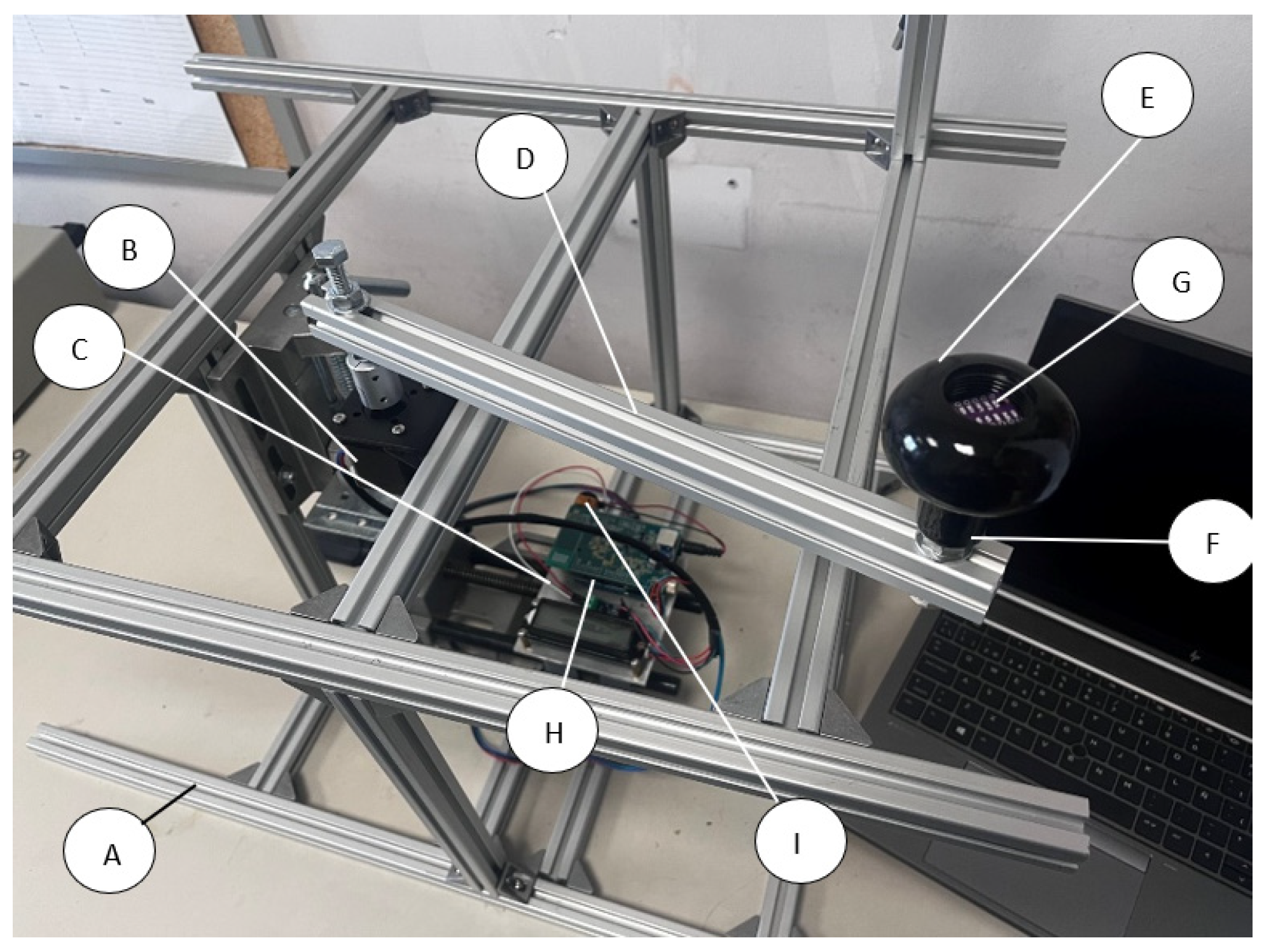
Figure 6 shows the built prototype of the sensored rotating crank of the designed assistance device for arm exercises with dimensions of 30 × 2 × 3 mm and weight of 0.1 N. This crank is attached to a testbed simulating the frame body, giving the laboratory-built prototype of the assisting device an overall weight of 20 N and a size of 40 × 40 × 40 cm, as shown in
Figure 7. This testbed prototype is assembled with market components and 3D-printed parts at a total cost of about EUR 30.
The second author of this paper wanted to personally verify the feasibility and efficiency of the laboratory prototype of the motion-assisting device for arm exercises by conducting laboratory tests with an exercise of three simple complete rotations of the crank in the clockwise direction and three in the anti-clockwise direction, as shown
Figure 8. The test was performed with the subject/author standing in front of the device at a sufficient predetermined distance to allow for full extension of the arm to be exercised. The device is designed for useful operation with both arms, and the experiment was carried out by each arm to verify its feasibility. Each test comprised three turns of the rotating crank at a comfortable regular speed of about 1 revolute/s. The functionality of the prototype was found to be satisfactory with respect to the design characteristics in
Figure 3,
Figure 4 and
Figure 5 and in accordance with the programmed requirements in
Table 1 and
Figure 2, resulting in easy use and comfortable positioning of the user in front of the device during movement of the arm that involved all of the articulations of the arm and mainly those of the shoulder, as summarized in the snapshot in
Figure 8. At the same time, we also verified the quantification of the movement by checking the sensorization on the sensorized crank, obtaining the results shown in
Figure 9 and
Figure 10.
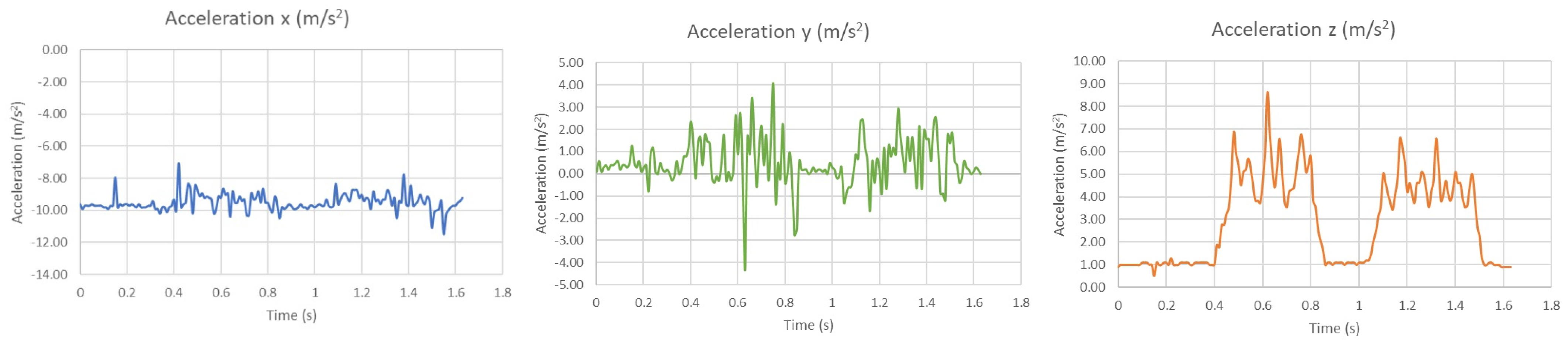
In particular,
Figure 9 shows the plots of the acquisitions of the acceleration components acquired by the IMU sensor installed inside the knob. A Cartesian reference system was considered with the X axis along the direction of gravity and the Z axis along the crank axis. The results show how the planar motion in the horizontal plane is disturbed most likely by the assembly and construction tolerances that determine the small vibrations in the graph along the X axis with respect to the gravity value. The movement is well monitored with respect to the Z component, which shows two groups of three movement cycles, as indicated by the pairwise peaks. These pairwise peaks correspond to the maximum extension and minimum distance of the arm from the user’s chest, with values that vary between approximately 4 and 9 m/s
2. It should be noted that in the graph, along the Z axis, the two groups of three cycles have different numerical values, indicating that the clockwise movement was easier than the anti-clockwise one, the first being relative to the first group and the second one relative to the second group of peaks. The Y component of the acceleration is detected with variations of approximately ±3 m/s
2 and this is probably due to the incomplete regularity of the motion of the arm, as well as the aforementioned construction and assembly tolerances of the prototype. Nonetheless, it can be considered that the graphs in
Figure 9 are well representative of the motion characteristics that can be performed by rotating the crank in the horizontal plane, with the possibility of adjusting the continuity and smoothness of the movement for the required mode of conscious control of the movement during a motion exercise of the arm. Therefore, from a kinematic point of view, use of the prototype device in
Figure 7 can be considered satisfactory and indeed promising in terms of the kinematics of the movement and its monitoring, with values that can be used for the diagnosis and planning of arm training and exercising.
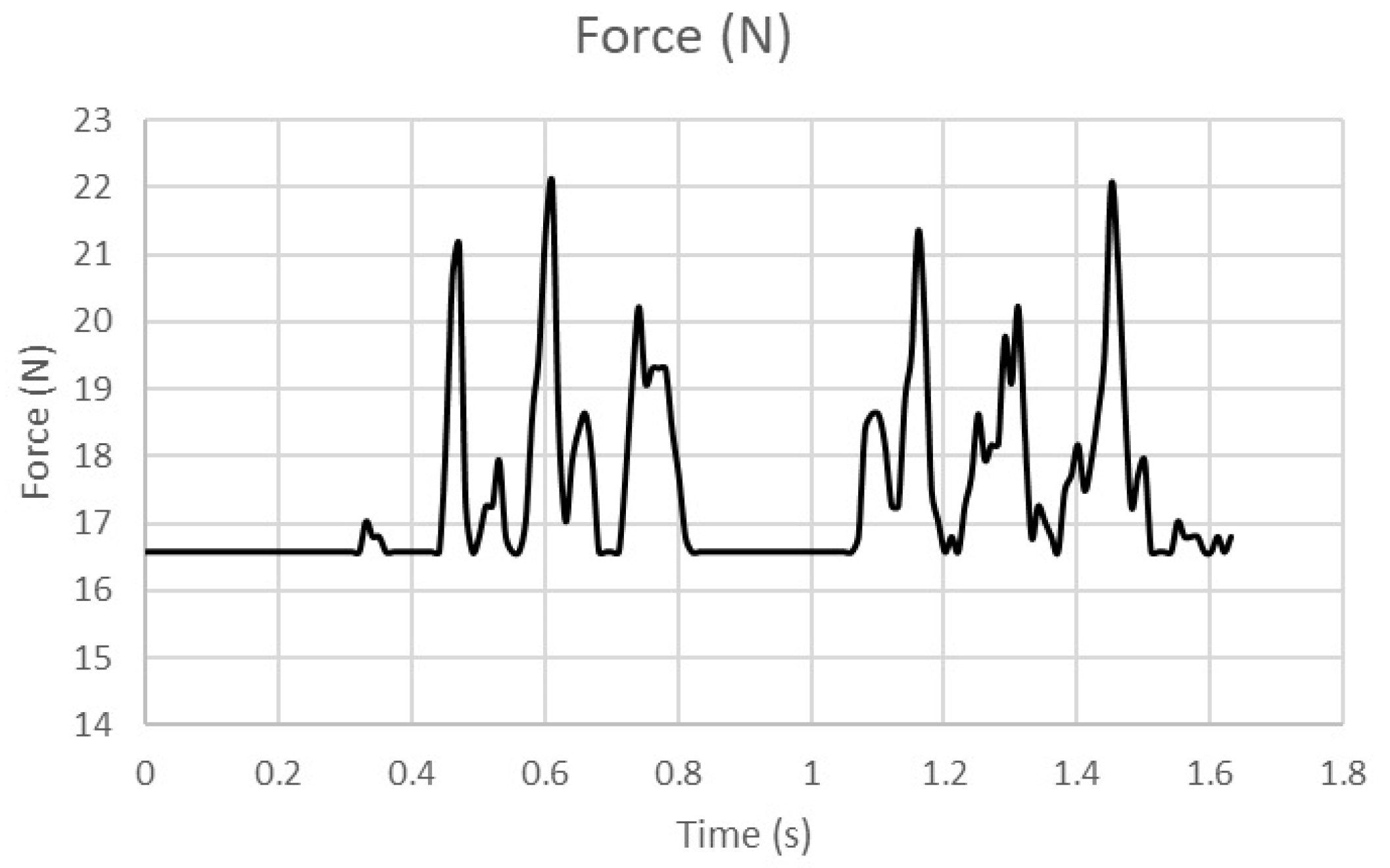
Figure 10 shows the data acquired by the force sensor on the knob axis during the motion exercise. In
Figure 10, one can note a clear indication again of the two groups of three movement cycles, with peaks characterizing the movement. In particular, it can be observed that the value of the acquired force appears to be equivalent during the clockwise and anti-clockwise movements, while the time evolution shows a difference, which once again indicates that the counterclockwise movement is less comfortable for the user, since in the second group, more abrupt and more extensive variations can be noted than in the first group. The analysis of the acquisition of the force exerted at the level of the knob can also be useful for characterizing not only the movement but also the action of the part of the arm moving the crank and therefore can be useful for varying the characteristics of the exercise as well as both the motion and muscular commitment on the part of the user.
The example reported of the simple exercise referring to the test in
Figure 8 with an approximate duration of less than 2 s allows us to consider the feasibility of the proposed device and its prototype more than satisfactory, as well as the efficiency of the numerical evaluation of the motion of the crank during exercise of the arm. The results of these first experiences suggest the planning of an adequate experimental campaign in the near future not only to characterize the functionality and benefits of arm motion exercise with the proposed assisting device incorporating the sensorized crank, but also to plan further strategies and exercises that can fully exploit the possibilities of the device designed especially for applications in the geriatric field for simple motion exercises to be carried out in an autonomous way by elderly users. Obviously, these first experiences have already highlighted problems that require further investigation, such as ensuring an assembly with tighter tolerances and also thinking about alternative gripping systems that can be useful for users who have difficulty grasping the knob currently available.
The user-autonomous operation can be ensured by the design and operation of the rotating crank, since the simple arm movement can be performed in full or partial rotation with the arm moving in the plane above the workspace of the rotating crank.
The safety of users using the device autonomously is achieved because the rotating crank, being sensored, can be stopped when either the velocity or the driving force exceeds the user’s threshold values, which can be predetermined before starting an exercise. The safety of users (patients or elderly people) is ensured by designing an appropriate cube frame that is safely configured next to the user, while all of the device components are inside it, leaving only the rotating crank available the operation. The exercise operation is run by turning the crank in the horizontal or vertical plane, where the user’s arm can freely move so that the risk of entrapment is avoided since the exposed area of the shaft is small enough to not allow clothing to snag during exercises. The device’s power voltage is 5 V, which is a very low voltage and common in the remote control of conventional home elements. This voltage is provided by two long-lasting and rechargeable batteries that are housed in a protective box to which access is not necessary during exercise.
The user-friendly operation without the need for constant supervision can be planned by transmitting the data and/or storage of the measurements acquired by the device sensors to a supervisor or healthcare operator. In addition, once those threshold operation values for a planned exercise have been set, the device can be operated by a user without any direct supervision.
Furthermore, the sensorization designed with only sensors for the biomechanics of movement can and must be enriched with further sensors as required in physiotherapy practices and motion sport exercise. The sensorization should also be implemented in smart systems for direct visualization by the users on their smartphones or tablets, and the data should be made available for remote monitoring by healthcare professionals who can evaluate, encourage, and guide arm motion exercises, together with monitoring the physical and psychological state of the elderly users.
A campaign with a sufficient number of subjects should be carried out in future work, and the plan should include ethical considerations and authorization from the Ethical Committee of the Tor Vergata Polyclinic Hospital, with all of the necessary aspects and procedures. In this paper, the test was carried out by one author only as a first laboratory check of the feasibility of the prototype, with no other issues of ethical considerations.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}