
Lower Limb Joint Angle Prediction Based on Multistream Signaling and Quantile Regression, Temporal Convolution Network–Bidirectional Long Short-Term Memory Network Neural Network


Abstract

1. Introduction
2. Materials and Methods
- The sEMG and IMU sensors acquire the lower limb muscle signals;
- The resulting data are filtered and subjected to signal smoothing and normalization by preprocessing and post-processing;
- A more comprehensive range of input sequences is obtained by stacking the 3-layer TCN residual module;
- The BiLSTM neural network is imported for joint angle prediction.
2.1. Signal Acquisition
2.2. Signal Processing
2.2.1. Noise Reduction of sEMG Signals
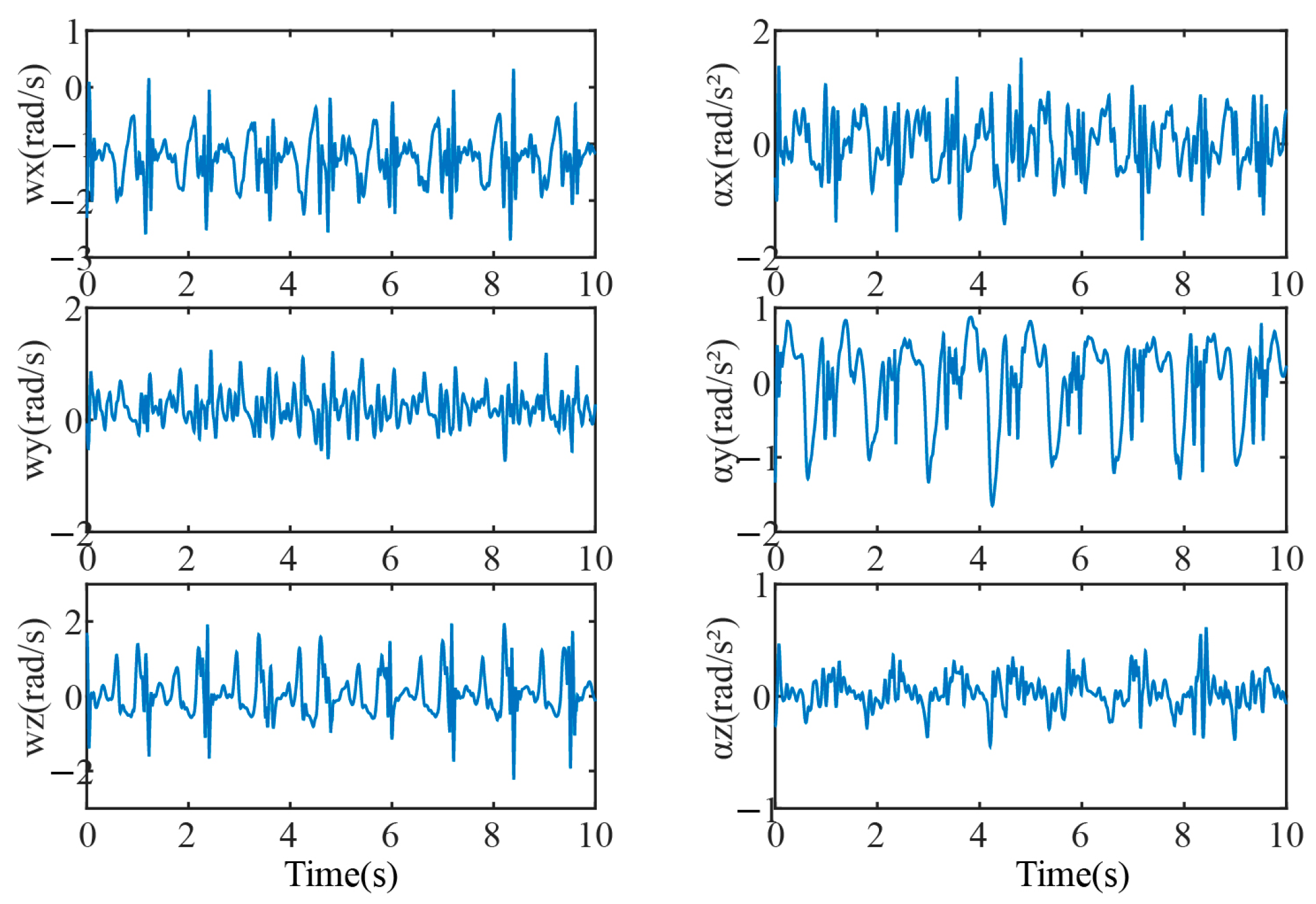
2.2.2. IMU Signal Noise Reduction
2.3. Neural Network Construction
2.3.1. Quantile Regression
2.3.2. Temporal Convolutional Network (TCN)
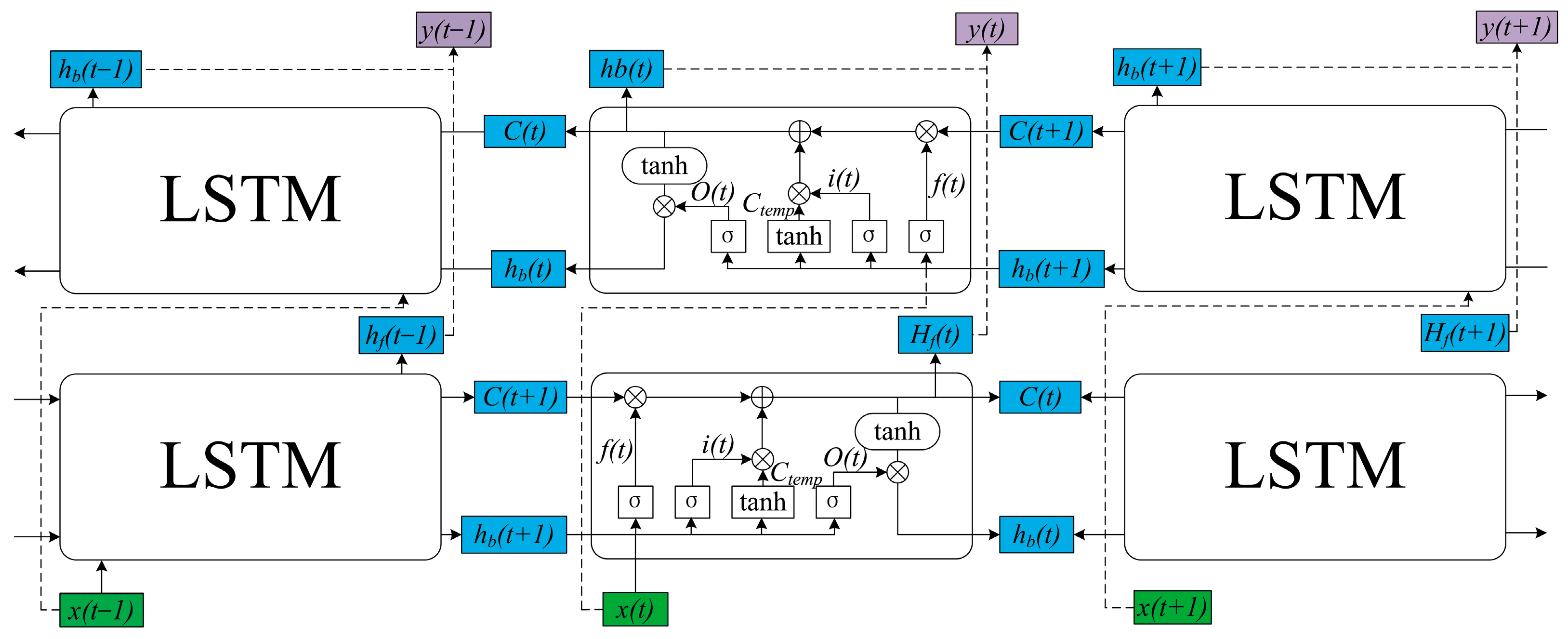
2.3.3. Bidirectional Long Short-Term Memory(BiLSTM)
2.4. Construction of Neural Network Prediction Model (QRTCN-BiLSTM)
3. Results
4. Discussion
4.1. Comparison of Precision Evaluation Indexes
4.2. Evaluation of Training Result Curves
5. Conclusions
- A signal acquisition system for physiological muscle signals and inertial measurement unit (IMU) data was designed to collect sEMG data during human walking and IMU data at both hip and knee joints. Theoretical tools such as wavelet noise reduction, filtering, and noise reduction processing can be applied to the above data to improve the quality and reliability of the signals.
- A neural network prediction model (QRTCN-BiLSTM) was constructed to predict the motion angles of human lower limb joints. This model was analyzed by quantile regression, and it integrates the fast feature extraction property of a temporal convolutional network (TCN) with the efficient temporal analysis performance of a bidirectional long and short-term memory network (BiLSTM). It is expected to present good learning and prediction performance.
- Combining human leg EMG information detection and the data acquisition process, a comparative experimental analysis of QRTCN-BiLSTM and the original QRBiLSTM model was carried out. Both the accuracy and the evaluation of the training result curves indicated that the QRTCN-BiLSTM model can more accurately infer the human motion intention in the task of the joint angle prediction of the lower limb, which provides a theoretical support for the human–machine interaction of rehabilitation robots.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, Y.; Wang, Y.; Zheng, H.; Wei, Z.; Tan, J. Gait Interaction Design of Lower Limb Rehabilitation Exoskeletons: A Review. J. Mech. Eng. 2023, 59, 175–188. [Google Scholar]
- Li, L.-L.; Cao, G.-Z.; Liang, H.-J.; Zhang, Y.-P.; Cui, F. Human lower limb motion intention recognition for exoskeletons: A review. IEEE Sens. J. 2023, 23, 30007–30036. [Google Scholar] [CrossRef]
- Yang, J.; He, Y.; Shi, P.; Yu, H. A review on human intent understanding and compliance control strategies for lower limb exoskeletons. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2022, 236, 1067–1086. [Google Scholar] [CrossRef]
- Nanqiang, S.; Gangfeng, L.; Tianjiao, Z.; Wensheng, L.; Xiaoming, M.; Yanhe, Z.; Jie, Z. Research progress and clinical application of lower limb rehabilitation robot. Inf. Control 2021, 50, 43–53. [Google Scholar]
- Seo, K.; Lee, J.; Park, Y.J. Autonomous hip exoskeleton saves metabolic cost of walking uphill. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 246–251. [Google Scholar]
- Steele, K.M.; Rozumalski, A.; Schwartz, M.H. Muscle synergies and complexity of neuromuscular control during gait in cerebral palsy. Dev. Med. Child Neurol. 2015, 57, 1176–1182. [Google Scholar] [CrossRef]
- Emery, A.E. Population frequencies of inherited neuromuscular diseases—A world survey. Neuromuscul. Disord. 1991, 1, 19–29. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X.; Zhang, M.; Huang, J. Adaptive position constrained assist-as-needed control for rehabilitation robots. IEEE Trans. Ind. Electron. 2023, 71, 4059–4068. [Google Scholar] [CrossRef]
- Lang, X.; Wang, W.; Su, T.; Hou, Z.; He, G.; Ren, S.; Shi, W. Active Compliant and Adaptive Interaction Control for a Lower Limb Rehabilitation Robot. Robot 2021, 43, 547–556. [Google Scholar] [CrossRef]
- Martinez, A.; Lawson, B.; Durrough, C.; Goldfarb, M. A velocity-field-based controller for assisting leg movement during walking with a bilateral hip and knee lower limb exoskeleton. IEEE Trans. Robot. 2018, 35, 307–316. [Google Scholar] [CrossRef]
- Lu, H.; Wang, H.; Feng, Y. Human-machine coupling dynamics modeling and active compliance control of lower limb rehabilitation robot. J. Mech. Eng. 2022, 58, 32–43. [Google Scholar]
- Kyeong, S.; Feng, J.; Ryu, J.K.; Park, J.J.; Lee, K.H.; Kim, J. Surface electromyography characteristics for motion intention recognition and implementation issues in lower-limb exoskeletons. Int. J. Control Autom. Syst. 2022, 20, 1018–1028. [Google Scholar] [CrossRef]
- Qin, P.; Shi, X. A novel method for lower limb joint angle estimation based on sEMG signal. IEEE Trans. Instrum. Meas. 2021, 70, 2511909. [Google Scholar] [CrossRef]
- Nazmi, N.; Abdul Rahman, M.A.; Yamamoto, S.-I.; Ahmad, S.A.; Zamzuri, H.; Mazlan, S.A. A review of classification techniques of EMG signals during isotonic and isometric contractions. Sensors 2016, 16, 1304. [Google Scholar] [CrossRef] [PubMed]
- Farina, D.; Negro, F. Accessing the neural drive to muscle and translation to neurorehabilitation technologies. IEEE Rev. Biomed. Eng. 2012, 5, 3–14. [Google Scholar] [CrossRef] [PubMed]
- Vijayvargiya, A.; Khimraj; Kumar, R.; Dey, N. Voting-based 1D CNN model for human lower limb activity recognition using sEMG signal. Phys. Eng. Sci. Med. 2021, 44, 1297–1309. [Google Scholar] [CrossRef]
- Gao, B.; Wei, C.; Ma, H.; Yang, S.; Ma, X.; Zhang, S. Real-Time Evaluation of the Signal Processing of sEMG Used in Limb Exoskeleton Rehabilitation System. Appl. Bionics Biomech. 2018, 2018, 1391032. [Google Scholar] [CrossRef]
- Chai, Y.; Liu, K.; Li, C.; Sun, Z.; Jin, L.; Shi, T. A novel method based on long short term memory network and discrete-time zeroing neural algorithm for upper-limb continuous estimation using sEMG signals. Biomed. Signal Process. Control 2021, 67, 102416. [Google Scholar] [CrossRef]
- Zhang, F.; Li, P.; Hou, Z.-G.; Lu, Z.; Chen, Y.; Li, Q.; Tan, M. sEMG-based continuous estimation of joint angles of human legs by using BP neural network. Neurocomputing 2012, 78, 139–148. [Google Scholar] [CrossRef]
- Song, Q.; Ma, X.; Liu, Y. Continuous online prediction of lower limb joints angles based on sEMG signals by deep learning approach. Comput. Biol. Med. 2023, 163, 107124. [Google Scholar] [CrossRef]
- Yi, C.; Jiang, F.; Zhang, S.; Guo, H.; Yang, C.; Ding, Z.; Wei, B.; Lan, X.; Zhou, H. Continuous prediction of lower-limb kinematics from multi-modal biomedical signals. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 2592–2602. [Google Scholar] [CrossRef]
- Zhang, Y.-P.; Cao, G.-Z.; Ling, Z.-Q.; He, B.-B.; Cheng, H.-R.; Li, W.-Z.; Cao, S.-B. A real-time gait phase recognition method based on multi-information fusion. In Proceedings of the 2021 18th International Conference on Ubiquitous Robots (UR), Gangneung, Republic of Korea, 12–14 July 2021; pp. 249–255. [Google Scholar]
- Coker, J.; Chen, H.; Schall Jr, M.C.; Gallagher, S.; Zabala, M. EMG and joint angle-based machine learning to predict future joint angles at the knee. Sensors 2021, 21, 3622. [Google Scholar] [CrossRef] [PubMed]
- Baby Jephil, P.; Acharaya, P.; Xu, L.; Guo, K.; Yu, H.; Watsford, M.; Rong, S.; Su, S. Estimation of ankle joint torque and angle based on S-EMG signal for assistive rehabilitation robots. In Biomedical Signal Processing: Advances in Theory, Algorithms and Applications; Springer: Singapore, 2020; pp. 31–47. [Google Scholar]
- Goh, G.L.; Huang, X.; Toh, W.; Li, Z.; Lee, S.; Yeong, W.Y.; Han, B.S.; Ng, T.Y. Joint angle prediction for a cable-driven gripper with variable joint stiffness through numerical modeling and machine learning. Int. J. AI Mater. Des. 2024, 1, 62–74. [Google Scholar] [CrossRef]
- Li, W.; Liu, K.; Sun, Z.; Li, C.; Chai, Y.; Gu, J. A neural network-based model for lower limb continuous estimation against the disturbance of uncertainty. Biomed. Signal Process. Control 2022, 71, 103115. [Google Scholar] [CrossRef]
- Zhu, M.; Guan, X.; Li, Z.; He, L.; Wang, Z.; Cai, K. sEMG-based lower limb motion prediction using CNN-LSTM with improved PCA optimization algorithm. J. Bionic Eng. 2023, 20, 612–627. [Google Scholar] [CrossRef]
- Astudillo, F.; Charry, J.; Minchala, I.; Wong, S. Lower limbs motion intention detection by using pattern recognition. In Proceedings of the 2018 IEEE Third Ecuador Technical Chapters Meeting (ETCM), Cuenca, Ecuador, 15–19 October 2018; pp. 1–6. [Google Scholar]
- Khairuddin, I.M.; Sidek, S.N.; Majeed, A.P.A.; Razman, M.A.M.; Puzi, A.A.; Yusof, H.M. The classification of movement intention through machine learning models: The identification of significant time-domain EMG features. PeerJ Comput. Sci. 2021, 7, e379. [Google Scholar] [CrossRef]
- Srivastava, M.; Anderson, C.L.; Freed, J.H. A new wavelet denoising method for selecting decomposition levels and noise thresholds. IEEE Access 2016, 4, 3862–3877. [Google Scholar] [CrossRef]
- Messer, S.R.; Agzarian, J.; Abbott, D. Optimal wavelet denoising for phonocardiograms. Microelectron. J. 2001, 32, 931–941. [Google Scholar] [CrossRef]
- Van Houdt, G.; Mosquera, C.; Nápoles, G. A review on the long short-term memory model. Artif. Intell. Rev. 2020, 53, 5929–5955. [Google Scholar] [CrossRef]
- Su, Y.; Kuo, C.-C.J. On extended long short-term memory and dependent bidirectional recurrent neural network. Neurocomputing 2019, 356, 151–161. [Google Scholar] [CrossRef]
- Hochreiter, S. Long Short-Term Memory; Neural Computation MIT-Press: Cambridge, MA, USA, 1997. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Sexes | Age | Weight/kg | Height/cm |
|---|---|---|---|---|
| 1 | male | 27 | 75 | 175 |
| 2 | male | 26 | 66 | 175 |
| 3 | male | 26 | 64 | 170 |
| 4 | male | 24 | 80 | 185 |
| 5 | male | 24 | 60 | 172 |
| Joint | RMSE | MAE | R2 | MAPE | Area Coverage | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| QB | QTB | QB | QTB | QB | QTB | QB | QTB | QB | QTB | ||
| Training set | Anglehip (rad) | 0.062 | 0.036 | 0.047 | 0.026 | 0.911 | 0.966 | 2.04% | 1.17% | 95.13% | 97.68% |
| Angleknee (rad) | 0.042 | 0.023 | 0.019 | 0.017 | 0.898 | 0.944 | 0.92% | 0.83% | 94.27% | 98.13% | |
| Test set | Anglehip (rad) | 0.079 | 0.046 | 0.059 | 0.033 | 0.858 | 0.947 | 2.56% | 1.46% | 94.86% | 95.78% |
| Angleknee (rad) | 0.045 | 0.029 | 0.022 | 0.016 | 0.874 | 0.932 | 1.08% | 0.80% | 92.85% | 96.86% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wang, Y.; Guo, F.; Yan, H.; Zhao, F. Lower Limb Joint Angle Prediction Based on Multistream Signaling and Quantile Regression, Temporal Convolution Network–Bidirectional Long Short-Term Memory Network Neural Network. Machines 2024, 12, 901. https://doi.org/10.3390/machines12120901
Wang L, Wang Y, Guo F, Yan H, Zhao F. Lower Limb Joint Angle Prediction Based on Multistream Signaling and Quantile Regression, Temporal Convolution Network–Bidirectional Long Short-Term Memory Network Neural Network. Machines. 2024; 12(12):901. https://doi.org/10.3390/machines12120901
Chicago/Turabian StyleWang, Leilei, Yunxue Wang, Fei Guo, Hao Yan, and Feifei Zhao. 2024. "Lower Limb Joint Angle Prediction Based on Multistream Signaling and Quantile Regression, Temporal Convolution Network–Bidirectional Long Short-Term Memory Network Neural Network" Machines 12, no. 12: 901. https://doi.org/10.3390/machines12120901
APA StyleWang, L., Wang, Y., Guo, F., Yan, H., & Zhao, F. (2024). Lower Limb Joint Angle Prediction Based on Multistream Signaling and Quantile Regression, Temporal Convolution Network–Bidirectional Long Short-Term Memory Network Neural Network. Machines, 12(12), 901. https://doi.org/10.3390/machines12120901