


Advanced Fault Detection and Severity Analysis of Broken Rotor Bars in Induction Motors: Comparative Classification and Feature Study Using Dimensionality Reduction Techniques

 ,
, 
 , and
, and 
Abstract
1. Introduction
1.1. Related Works
1.2. Summary of Open Problems and Paper Objective
2. Materials and Methods
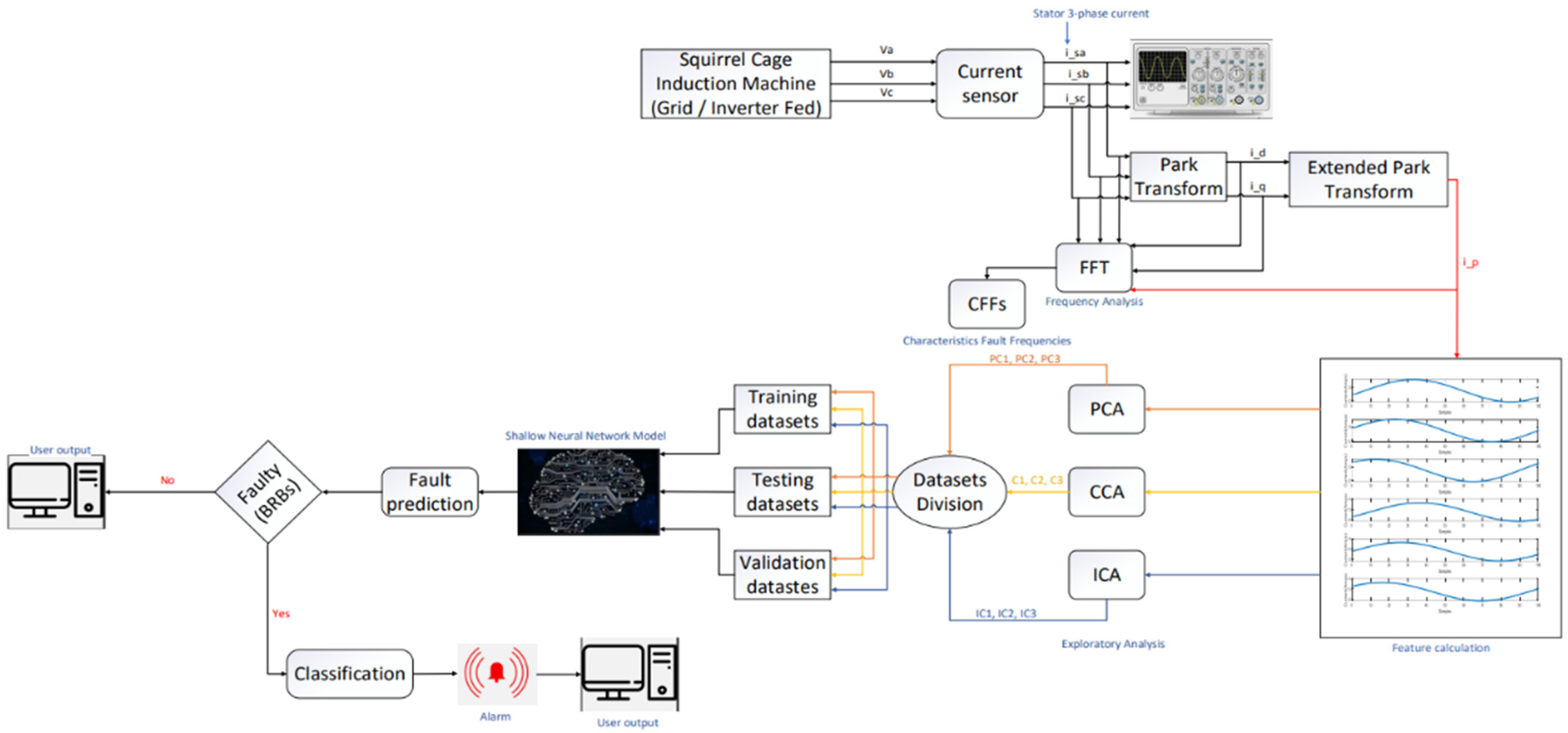
2.1. Methodology
- (a)
- Problem Definition (BRBs): One of the most common IM faults is the broken rotor bar fault. If not detected in a timely manner, this fault can cause significant financial losses and production delays for industries. According to statistics presented in [32], BRB faults contribute to 8–9% of IM faults. Therefore, early identification and precise determination of this fault is crucial to prevent such setbacks.
- (b)
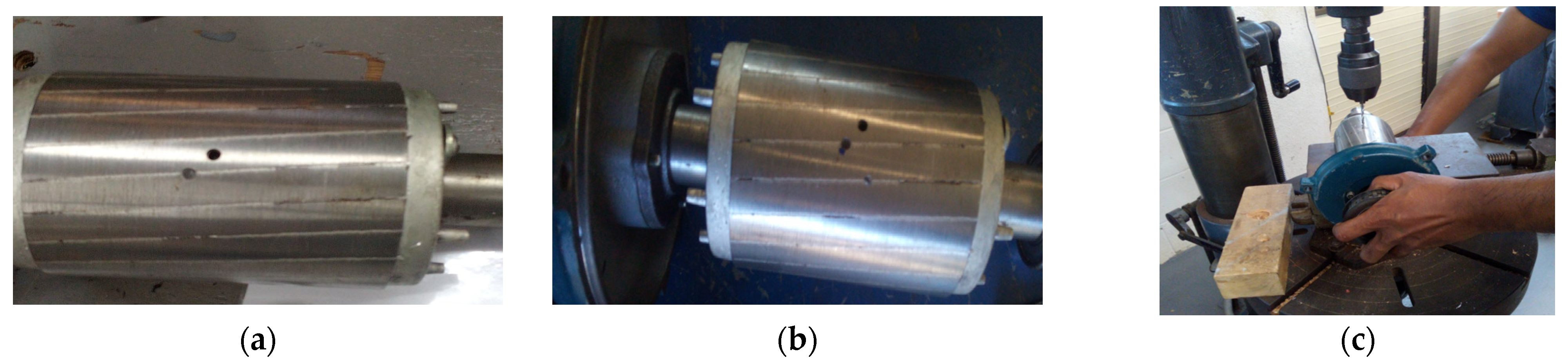
- Fault generation: Experimentation on BRBs was performed with a grid-connected three-phase faulty IM. To induce a fault on the IM, holes were drilled into the rotor bar to determine the fault severity. The motor was then run under the specified configuration, and the corresponding current signatures were recorded. Severity levels created included 1.5 BRBs, 2 BRBs, 2.5 BRBs, and 3 BRBs.
- (c)
- Data acquisition: Three current sensors were used to display the three-phase current signatures on an oscilloscope and then stored on a hard drive. The stator-current signal was acquired at a sampling frequency of 250 Hz, selected to ensure an efficient balance between data volume and computational demands for the proposed machine learning model training. Multiple trials were conducted for each test scenario, with 10 s of data collected per trial, yielding a robust dataset for analysis. This sampling rate was found to be sufficient for capturing the fundamental frequency and primary CFFs associated with BRB faults. While a higher sampling frequency may have improved the resolution of fault indicators, especially for higher-order harmonics, the current sampling rate proved to be effective for the intended quick-detection application and avoided computational delays during processing of the signals.
- (d)
- Data Handling: Stator current signals were processed through several data handling steps to ensure high-quality input for feature extraction and classification. First, the signals were segmented into fixed-length frames, allowing for efficient feature extraction from discrete intervals. Normalization was then applied to each frame to maintain consistent amplitude across samples, which enhanced model accuracy by reducing variance due to signal amplitude changes. This preprocessing pipeline effectively prepared the data for dimensionality reduction and classification, ensuring that fault-specific characteristics were accurately captured and used in the diagnostic model.
- (e)
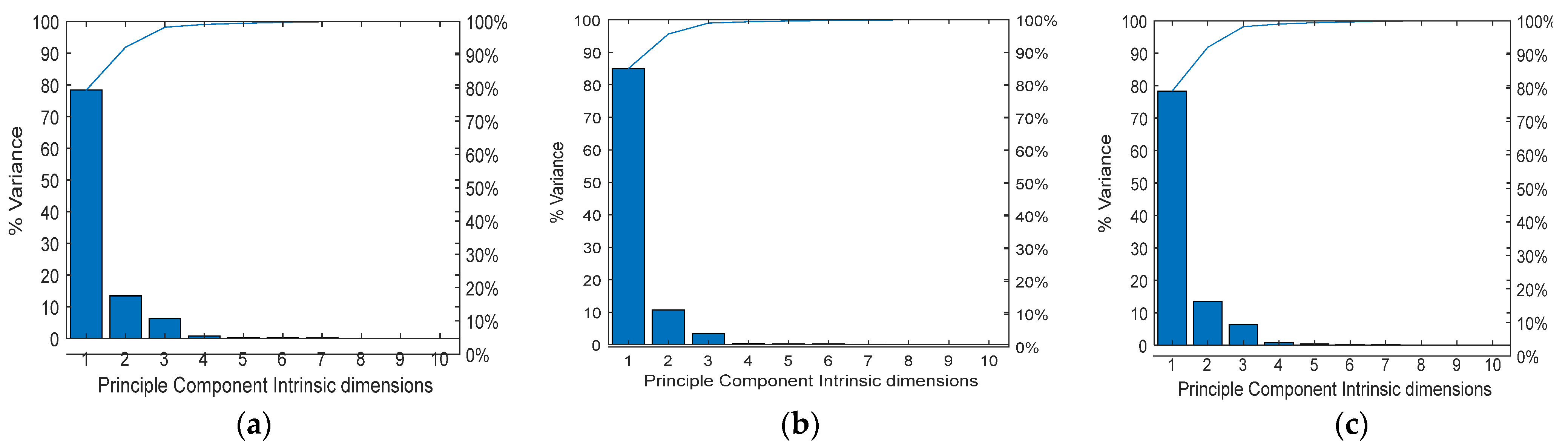
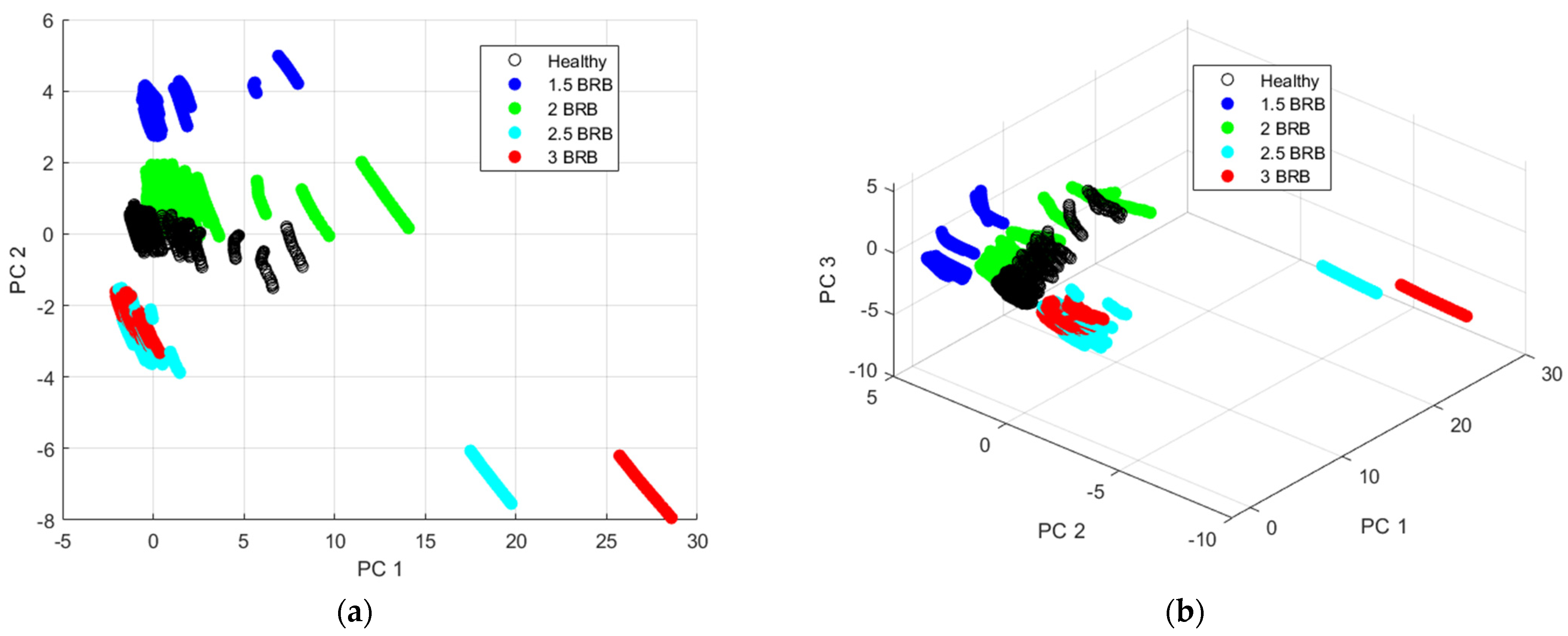
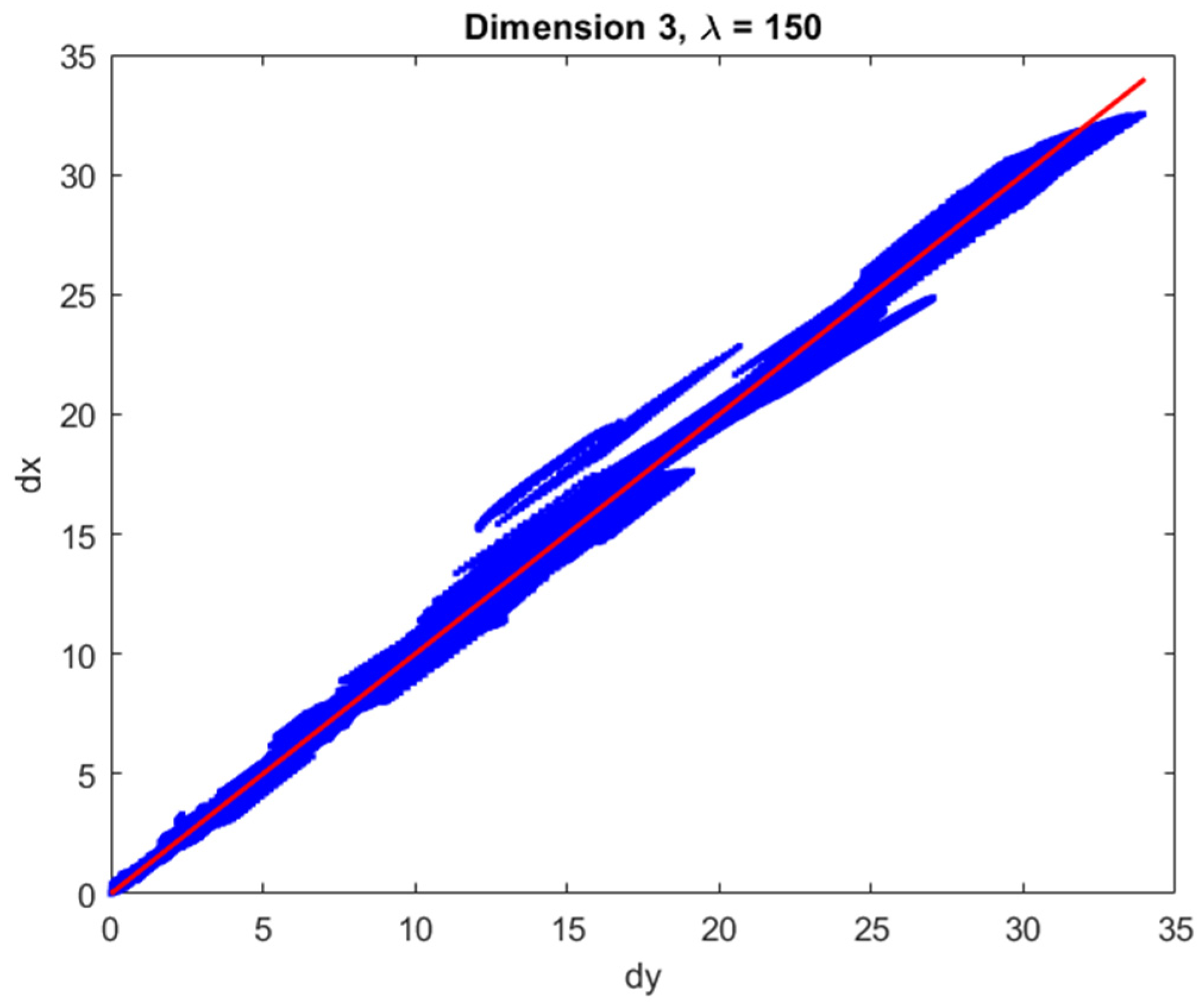
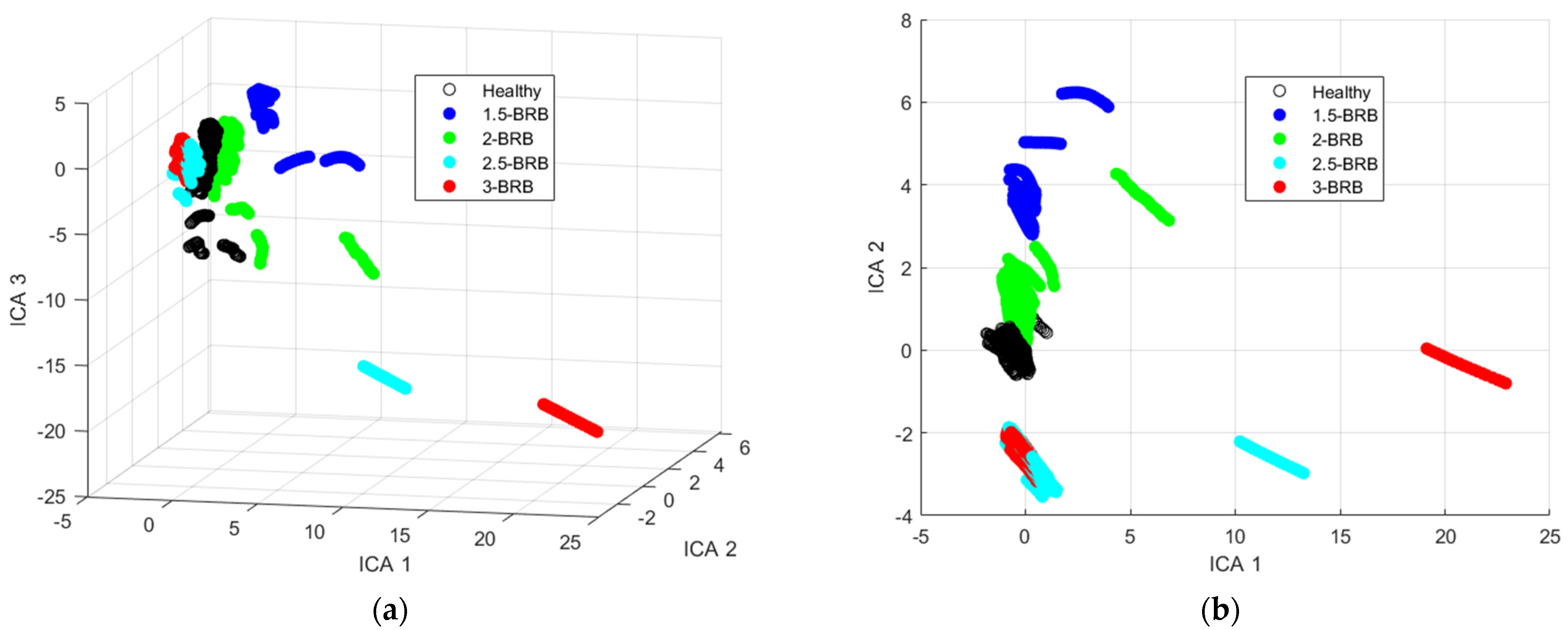
- Exploratory analysis of data: From the raw data, Parks and extended Parks quantity were calculated, followed by the calculation of the fifteen statistical time-domain features. The data were analyzed using frequency analysis by performing the FFT technique to view the CFFs. The data were further analyzed using exploratory analysis tools like PCA, CCA, and ICA.
- (f)
- Model development and training: After going through the exploratory analysis of data, neural and non-neural-based models were designed using MATLAB® software (r2021b). Feature inputs included fifteen time-domain statistical features and transformed PCA, CCA, and ICA features. Standard procedures for partitioning the dataset into training, validation, and test sets were adopted.
- (g)
- Classification of test dataset: Using the test-sets (full features and reduced feature-sets), neural network models, and a few non-neural techniques like decision trees, SVM, and ensemble bagged trees, the BRB faults were analyzed. Furthermore, the accuracies were compared for performance evaluation.
2.2. Experimental Test Rig
3. Results and Discussion
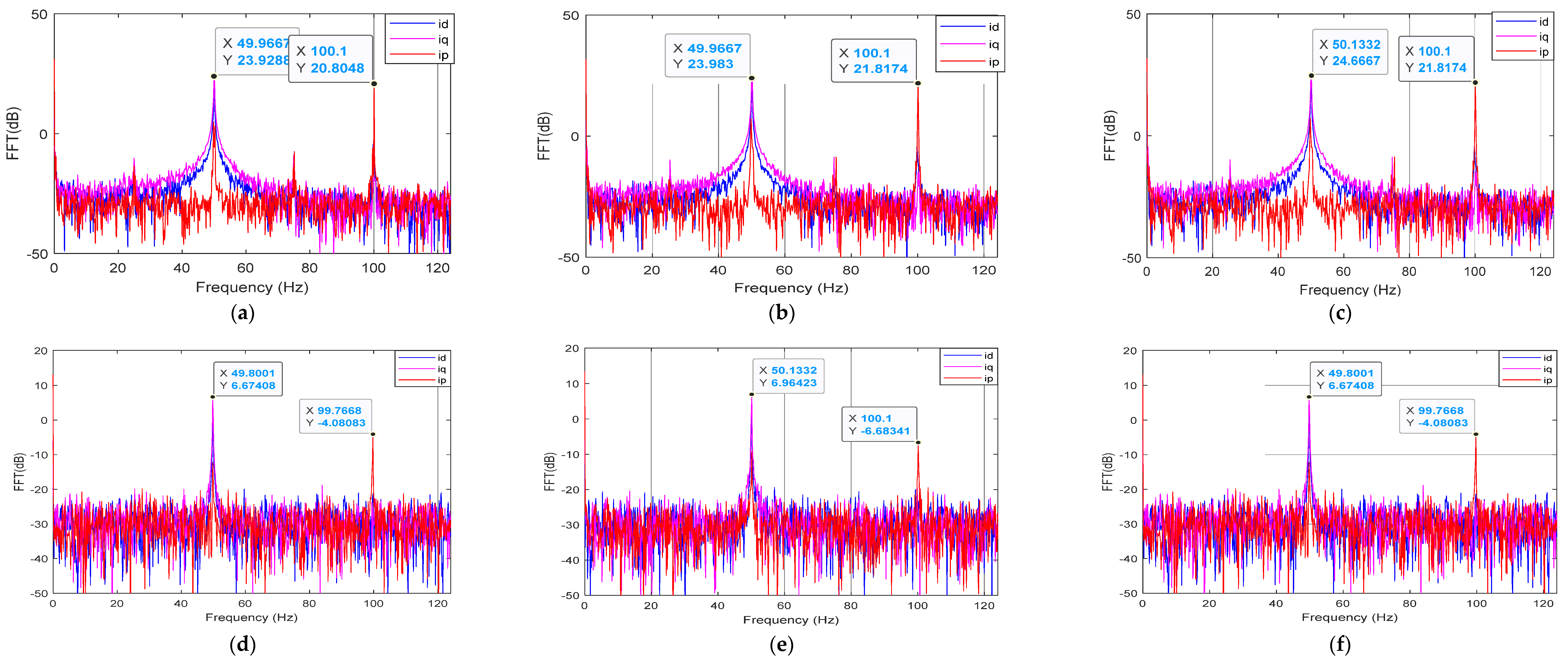
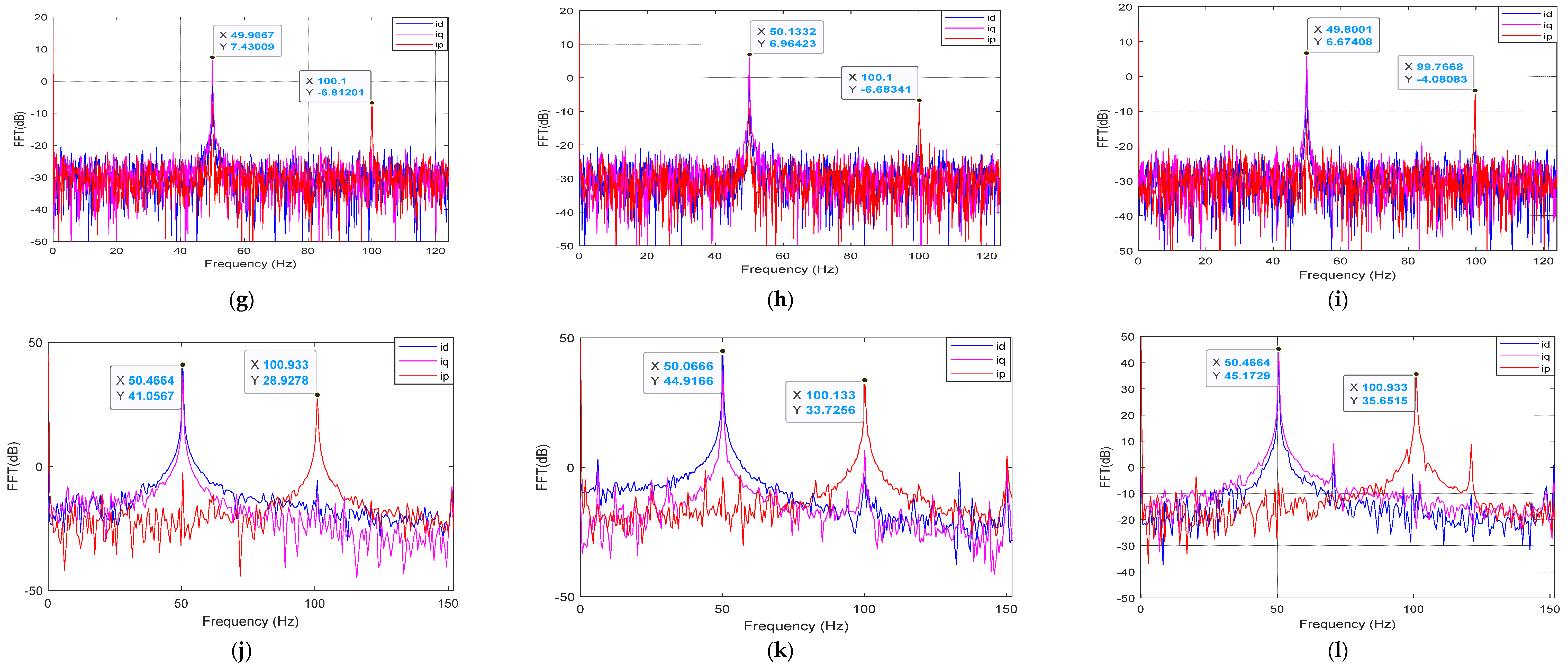
3.1. Frequency Analysis: Fast Fourier Transform
3.1.1. Faulty IM: Different Severity Levels at Different Load Conditions
3.1.2. Park’s and Extended Park Quantity–Frequency Spectrum
3.2. Feature Extraction and Exploratory Analysis
3.3. Dataset Partitioning
- Training dataset (3500 samples): 70%;
- Validation dataset (750 samples): 15%;
- Test dataset (750 samples): 15%.
One-Hot Encoding
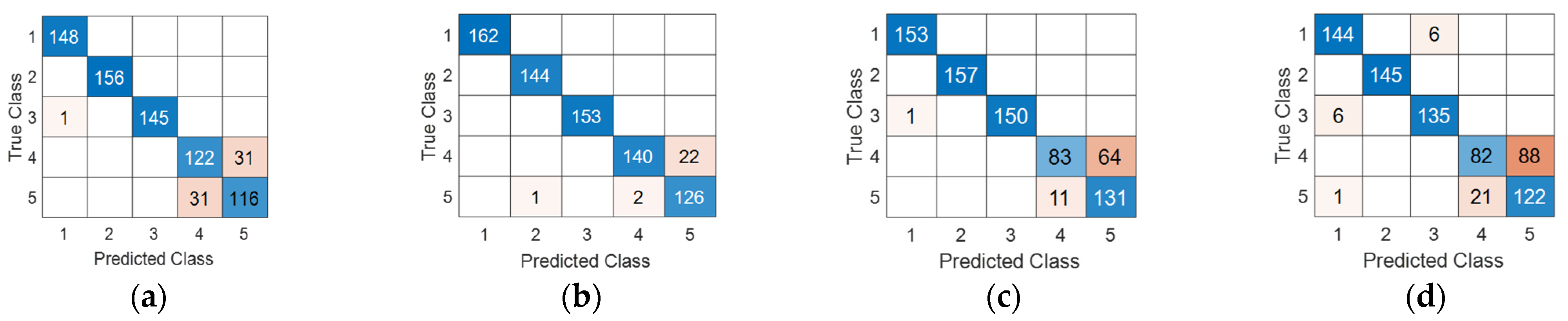
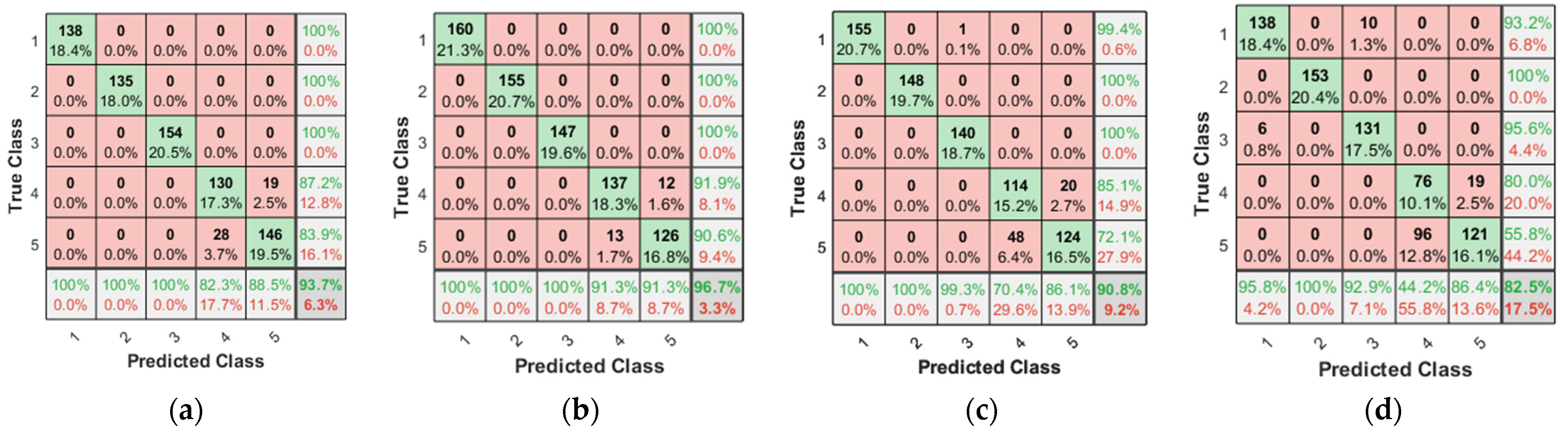
3.4. Classification Using Neural and Non-Neural Based Techniques
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ram, S.; Upadhyay, M. A Review on Different Types of Faults in Induction Motor and Methods to Control Speed of Induction Motors. Res. J. Eng. Technol. Med. Sci. 2022, 5, 192–199. [Google Scholar]
- Venkatasubramanian, V.; Rengaswamy, R.; Yin, K.; Kavuri, S.N. A review of process fault detection and diagnosis: Part I: Quantitative model-based methods. Comput. Chem. Eng. 2003, 27, 293–311. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, S.; Zhang, Y.; Zhang, C.; Wu, J. A Review of Statistical-Based Fault Detection and Diagnosis with Probabilistic Models. Symmetry 2024, 16, 455. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Information Science and Statistics; Springer: New York, NY, USA, 2016. [Google Scholar]
- Zhang, X.; Foo, G.; Don Vilathgamuwa, M.; Tseng, K.J.; Bhangu, B.S.; Gajanayake, C. Sensor fault detection, isolation and system reconfiguration based on extended Kalman filter for induction motor drives. IET Electr. Power Appl. 2013, 7, 607–617. [Google Scholar] [CrossRef]
- Zhou, Z.; Dong, C.; Zhang, Q. Dynamic Fault Tree Analysis Based on Dynamic Uncertain Causality Graph. In Proceedings of the ICONE26, Volume 2: Plant Systems, Structures, Components, and Materials; Risk Assessments and Management, London, UK, 22–26 July 2018. [Google Scholar] [CrossRef]
- Kumar, R.R.; Andriollo, M.; Cirrincione, G.; Cirrincione, M.; Tortella, A. A Comprehensive Review of Conventional and Intelligence-Based Approaches for the Fault Diagnosis and Condition Monitoring of Induction Motors. Energies 2022, 15, 8938. [Google Scholar] [CrossRef]
- Fernandez-Cavero, V.; Pons-Llinares, J.; Duque-Perez, O.; Morinigo-Sotelo, D. Detection of broken rotor bars in nonlinear startups of inverter-fed induction motors. IEEE Trans. Ind. Appl. 2021, 57, 2559–2568. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.; Roger-Folch, J.; Moríñigo-Sotelo, D.; Duque-Pérez, O. Mixed eccentricity diagnosis in Inverter-Fed Induction Motors via the Adaptive Slope Transform of transient stator currents. Mech. Syst. Signal Process. 2014, 48, 423–435. [Google Scholar] [CrossRef]
- Wang, W.; Song, X.; Liu, G.; Chen, Q.; Zhao, W.; Zhu, H. Induction Motor Broken Rotor Bar Fault Diagnosis Based on Third-Order Energy Operator Demodulated Current Signal. IEEE Trans. Energy Convers. 2022, 37, 1052–1059. [Google Scholar] [CrossRef]
- Kabul, A.; Ünsal, A. An alternative approach for the detection of broken rotor bars and bearing faults of induction motor based on vibration signals. In Proceedings of the 2021 8th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 9–11 April 2021; pp. 126–131. [Google Scholar]
- Ramu, S.K.; Irudayaraj, G.C.R.; Subramani, S.; Subramaniam, U. Broken rotor bar fault detection using Hilbert transform and neural networks applied to direct torque control of induction motor drive. IET Power Electron. 2020, 13, 3328–3338. [Google Scholar] [CrossRef]
- Dehina, W.; Boumehraz, M.; Kratz, F. Diagnosis and detection of rotor bars faults in induction motor using HT and DWT techniques. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; pp. 109–115. [Google Scholar]
- Cherif, B.D.E.; Bendiabdellah, A.; Seninete, S. Induction Motor Diagnosis with Broken Rotor Bar Faults Using DWT Technique. In Proceedings of the 2021 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Kuala Lumpur, Malaysia, 12–13 June 2021; pp. 1–5. [Google Scholar]
- Ameid, T.; Ammar, A.; Talhaoui, H.; Azzoug, Y.; Chebaani, M. An automatic rotor bar fault diagnosis using fuzzy logic and DWT-energy for backstepping control driven induction motor in low-speed operation. Soft Comput. 2023, 27, 10411–10426. [Google Scholar] [CrossRef]
- Shi, P.; Chen, Z.; Vagapov, Y.; Zouaoui, Z. A new diagnosis of broken rotor bar fault extent in three phase squirrel cage induction motor. Mech. Syst. Signal Process. 2014, 42, 388–403. [Google Scholar] [CrossRef]
- Jimenez, G.A.; Munoz, A.O.; Duarte-Mermoud, M.A. Fault detection in induction motors using Hilbert and Wavelet transforms. Electr. Eng. 2007, 89, 205–220. [Google Scholar] [CrossRef]
- Reljič, D.; Jerkan, D.; Kanovič, Ž. Broken rotor bar fault detection using advanced IM model and artificial intelligence approach. In Proceedings of the IEEE EUROCON 2019-18th International Conference on Smart Technologies, Novi Sad, Serbia, 1–4 July 2019; pp. 1–6. [Google Scholar]
- Djalel, D.; Yahia, K.; Mostefa Mohamed, T.; Hichem, M.; Khouloud, B. Detection and SVM classification of Broken Rotor bars Fault in induction motor using WPA. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 1001–1005. [Google Scholar] [CrossRef]
- Kumar, S.; Buksh, N.; Raj, K.K.; Kumar, R.R. A Comparative Classification Study for Broken Rotor Bar Fault and its Severity Analysis using Machine Learning Approaches in Rotating Machines. In Proceedings of the 2023 IEEE International Conference on Energy Technologies for Future Grids (ETFG), Wollongong, Australia, 3–6 December 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Preethi, I.; Suryaprakash, S.; Mathankumar, M. A State-of-Art Approach on Fault Detection in Three Phase Induction Motor using AI Techniques. In Proceedings of the 2021 5th International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 8–10 April 2021; pp. 567–573. [Google Scholar] [CrossRef]
- Ghasemi, S.; Sadeghian, A. Application of Hybrid Wavelet-SVM Algorithm to Detect Broken Rotor Bars in Induction Motors. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 01–06. [Google Scholar]
- Veit, A.; Belongie, S. Convolutional networks with adaptive inference graphs. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–18. [Google Scholar]
- Aggarwal, C.C. Neural Networks and Deep Learning; Springer: Cham, Switzerland, 2018; Volume 10, pp. 978–983. [Google Scholar]
- Kumar, R.R.; Cirrincione, G.; Cirrincione, M.; Tortella, A.; Andriollo, M. A Topological Neural-Based Scheme for Classification of Faults in Induction Machines. IEEE Trans. Ind. Appl. 2020, 57, 272–283. [Google Scholar] [CrossRef]
- Kumar, P.; Hati, A.S. Transfer learning-based deep CNN model for multiple faults detection in SCIM. Neural Comput. Appl. 2021, 33, 15851–15862. [Google Scholar] [CrossRef]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly accurate machine fault diagnosis using deep transfer learning. IEEE Trans. Ind. Inform. 2018, 15, 2446–2455. [Google Scholar] [CrossRef]
- Kumar, R.R.; Cirrincione, G.; Cirrincione, M.; Andriollo, M.; Tortella, A. Accurate Fault Diagnosis and Classification Scheme Based on Non-Parametric, Statistical-Frequency Features and Neural Networks. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1747–1753. [Google Scholar] [CrossRef]
- Makuc, D.; Drobnič, K.; Ambrožič, V.; Miljavec, D.; Fišer, R.; Nemec, M. Parameters estimation of induction motor with faulty rotor. Prz. Elektrotech. 2012, 88, 41–46. [Google Scholar]
- Grande-Barreto, J.; Morales-Perez, C.; Rangel-Magdaleno, J.; Peregrina-Barreto, H. Half-broken bar detection using MCSA and statistical analysis. In Proceedings of the 2017 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 8–10 November 2017; pp. 1–5. [Google Scholar]
- Li, H.; Feng, G.; Zhen, D.; Gu, F.; Ball, A.D. A normalized frequency-domain energy operator for broken rotor bar fault diagnosis. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]
- Agah, G.R.; Rahideh, A.; Khodadadzadeh, H.; Khoshnazar, S.M.; Hedayatikia, S. Broken rotor bar and rotor eccentricity fault detection in induction motors using a combination of discrete wavelet transform and Teager–Kaiser energy operator. IEEE Trans. Energy Convers. 2022, 37, 2199–2206. [Google Scholar]
- Zarei, J.; Hassani, H.; Wei, Z.; Karimi, H.R. Broken rotor bars detection via Park’s vector approach based on ANFIS. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2422–2426. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Type | Squirrel Cage |
|---|---|
| Power | |
| Speed | |
| Frequency | |
| Rated Voltage | |
| Rated Current | |
| Number of pair poles | 2 |
| Number of rotor slots | 28 |
| Number of stator slots | 36 |
| Class Type | B |
| Fault Class | Fault Severity | Broken Rotor Bars |
|---|---|---|
| 1 | Healthy | 0 |
| 2 | 2 BRBs (50% severity) | 1.5 |
| 3 | 2 BRBs (100% severity) | 2 |
| 4 | 3 BRBs (50% severity) | 2.5 |
| 5 | 3 BRBs (100% severity) | 3 |
| Classifier | Normalized 15 Features | PCA | CCA | ICA | Comments |
|---|---|---|---|---|---|
| Shallow Dense NN | 93.70 | 96.70 | 90.80 | 82.50 | Number of neurons = 9, Architecture: * IN|FC|5OUT, Activation-SoftMax layer |
| LSTM NN | 91.60 | 96.67 | 89.87 | 83.73 | Number of neurons = 30, Architecture: * IN|FC|5OUT, Activation-SoftMax layer |
| Fine Tree | 86.1 | 76.0 | 70.3 | 67.5 | Max. Number of Splits = 100, Split Criterion: Gini’s Diversity index |
| Medium Tree | 86.9 | 77.3 | 66.1 | 72.0 | Max. Number of Splits = 20, Split Criterion: Gini’s Diversity index |
| Course Tree | 84.1 | 68.0 | 68.3 | 70.3 | Max. Number of Splits = 4, Split Criterion: Gini’s Diversity index |
| Quadratic Discriminant | 94.9 | 94.4 | 94.9 | 70.3 | Full Covariance Structure |
| Quadratic SVM | 91.2 | 92.0 | 94.1 | 68.5 | Kernel Function: Quadratic |
| Cubic SVM | 90.5 | 89.3 | 80.7 | 74.7 | Kernel Function: Cubic |
| Fine Gaussian SVM | 83.9 | 50.5 | 75.9 | 76.8 | Kernel Function: Gaussian |
| Class | Sensitivity (Recall) | Specificity | Precision | F1 Score |
|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | 1 | 1 | 1 |
| 3 | 1 | 1 | 1 | 1 |
| 4 | 0.919 | 0.974 | 0.919 | 0.919 |
| 5 | 0.906 | 0.981 | 0.906 | 0.906 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, R.R.; Waisale, L.O.; Tamata, J.L.; Tortella, A.; H. Kia, S.; Andriollo, M. Advanced Fault Detection and Severity Analysis of Broken Rotor Bars in Induction Motors: Comparative Classification and Feature Study Using Dimensionality Reduction Techniques. Machines 2024, 12, 890. https://doi.org/10.3390/machines12120890
Kumar RR, Waisale LO, Tamata JL, Tortella A, H. Kia S, Andriollo M. Advanced Fault Detection and Severity Analysis of Broken Rotor Bars in Induction Motors: Comparative Classification and Feature Study Using Dimensionality Reduction Techniques. Machines. 2024; 12(12):890. https://doi.org/10.3390/machines12120890
Chicago/Turabian StyleKumar, Rahul R., Litili O. Waisale, Jiuta L. Tamata, Andrea Tortella, Shahin H. Kia, and Mauro Andriollo. 2024. "Advanced Fault Detection and Severity Analysis of Broken Rotor Bars in Induction Motors: Comparative Classification and Feature Study Using Dimensionality Reduction Techniques" Machines 12, no. 12: 890. https://doi.org/10.3390/machines12120890
APA StyleKumar, R. R., Waisale, L. O., Tamata, J. L., Tortella, A., H. Kia, S., & Andriollo, M. (2024). Advanced Fault Detection and Severity Analysis of Broken Rotor Bars in Induction Motors: Comparative Classification and Feature Study Using Dimensionality Reduction Techniques. Machines, 12(12), 890. https://doi.org/10.3390/machines12120890