1. Introduction
For the last decade, autonomous driving has been known as a next-generation solution for future transportation in research institutes and the automotive industry because it can reduce several types of traffic accidents and make road safety and traffic flow better [
1,
2,
3]. For example, it was shown that a human driver with an excessive acceleration or braking style has a significant harmful impact on fuel consumption and emission pollutions [
4]. For those reasons, autonomous driving is considered as a potential alternative for the current transportation system problems. From the literature survey, it is well known that a generic modular system architecture for autonomous driving consists of detection, localization, prediction, planning, and control. Among them, localization, prediction, planning, and control can be merged into a single step, called end-to-end driving [
2]. Among these topics, path-tracking control (PTC) has been widely studied. Consequently, a great number of papers have been published in the research area of PTC [
5,
6,
7,
8,
9,
10,
11,
12,
13]. In this paper, it is assumed that PTC aims at the level 5 of autonomous driving [
14].
Generally, most of the PTC proposed to date has been designed on high-friction roads. Although this has shown good path-tracking performance on high-friction roads, it does not hold on low-friction roads [
15,
16,
17]. This means that the tire–road friction coefficient,
μ, has a significant influence on the path-tracking performance. More specifically, this is caused by the fact that the lateral tire force becomes much smaller due to low
μ conditions. Another problem, due to the same reason, is that several actuator combinations, such as front-wheel steering (FWS), four-wheel steering (4WS), and four-wheel independent braking/driving (4WIB/4WID), have little influences on the path-tracking performance [
16,
17]. In the opposite case, a PTC designed on low
μ roads also shows poor path-tracking performance on high
μ ones due to the longer preview distance under low
μ conditions. In other words, on high
μ roads, for better path tracking, it needs a smaller preview distance than that needed on low
μ roads.
To cope with the problem caused by the variations in
μ, several methods have been proposed to date. As the most popular one, gain scheduling has been selected for PTC under various operating conditions [
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. This method designs several controllers at several fixed points of time-varying parameters, and then interpolates or linearly combines those controllers over a range of time-varying ones. Finally, if a current point is identified or estimated, the corresponding controller is selected from interpolation or linear combination and is applied to PTC. Most papers using gain scheduling adopted vehicle speed and its inverse as a scheduling variable. On the contrary, there are few papers that selected
μ as a scheduling variable.
An adaptive control has also been used as a robust controller for PTC [
28,
29,
30,
31,
32,
33,
34,
35,
36]. This method of control changes controller gains according to variations in vehicle speed, cornering stiffness, and
μ. In this method, those parameters related to PTC are estimated by parameter adaptation schemes, such as recursive-least-square (RLS) or neural networks [
31,
32,
36]. Then, the estimated parameters are directly used in a controller. The drawback of adaptive control is that a parameter adaptation scheme is needed for the controller, and the control performance highly depends on the speed and accuracy of parameter adaptation. Gain scheduling and adaptive control have been combined with
H∞ control, MPC, and SMC [
18,
19,
21,
22,
23,
24,
25,
27,
31,
34].
When coping with the parameter variations, such as vehicle speed and
μ, the simplest method is to adopt adaptive look-ahead or preview distance schemes [
37,
38,
39,
40,
41,
42]. In those papers, a preview distance was adaptively adjusted using fuzzy reasoning according to parameter variations. The vehicle speed, side-slip angle, yaw rate, and road curvature were fed into the fuzzy membership function, and the preview distance or the velocity gain was obtained by fuzzy reasoning. However, most of those papers selected the vehicle speed as a scheduling variable, except in [
41]. In this paper,
μ is selected as a scheduling parameter.
In this paper, a state-space model is obtained from the target path and 2-DOF bicycle model [
16,
17,
18,
19,
20,
21,
23,
24,
25,
26,
27,
31,
32,
33,
34,
35,
36,
38,
42,
43]. This state-space model has the state variables of the lateral offset and heading errors, the side-slip angle, and the yaw rate. Using the state-space model, LQR is designed in this paper [
16,
17,
18,
20,
26,
43]. For LQR design, the LQ objective function with weights on the state variables is defined. The input configurations of LQR are FWS and 4WS, which are easily represented in the state-space model [
16,
17,
43]. To improve the path-tracking performance, the constraints on tire-slip angles are applied [
43].
To cope with the variations in
μ, an adaptive preview distance scheme (APDS) is proposed in this paper. The APDS consists of three consecutive steps. The first step is to design the LQR on the road, where
μ is 0.8. The second step is to tune the preview distance using the gain of LQR obtained from the first step in order to obtain the best path-tracking performance for each
μ, divided from 0.3 to 0.8 with an interval of 0.1. The third step is to apply curve fitting with an exponential function to those preview distances with respect to
μ. Those steps are performed through simulation using vehicle simulation software. A double-lane-change maneuver for collision avoidance is selected as a test scenario [
16,
17,
26,
38,
43]. A notable feature is that a fixed gain is used when tuning the preview distances for several
μ conditions. The only tuning parameter is the preview distance or the velocity gain. For this reason, this method is quite simple, compared to the previously proposed methods that used fuzzy reasoning.
The contributions of this paper can be summarized as follows:
This paper presents an adaptive preview distance scheme in order to overcome the problem caused by the variations in μ. This method is quite simple, compared to the previously proposed methods.
FWS and 4WS are used as actuators for PTC in this paper. With those steering actuators, the effects of various actuators on the adaptive preview distance scheme and path-tracking performance are investigated.
This paper has five sections.
Section 2 describes the vehicle model and LQR design procedures for PTC. The APDS is also presented in this section. In
Section 3, measures used to evaluate performance are presented. Simulation is performed and the results are analyzed in
Section 4. Conclusions are drawn in
Section 5.
2. Design of a Path-Tracking Controller with an Adaptive Preview Distance Scheme
In this paper, an LQR that uses full-state feedback was selected as a PTC. Using the state-space model and the LQ objective function, the LQR was designed. To maximize the lateral tire forces on low μ roads, constraints were imposed on the front and rear steering angles. With LQR, the APDS was proposed.
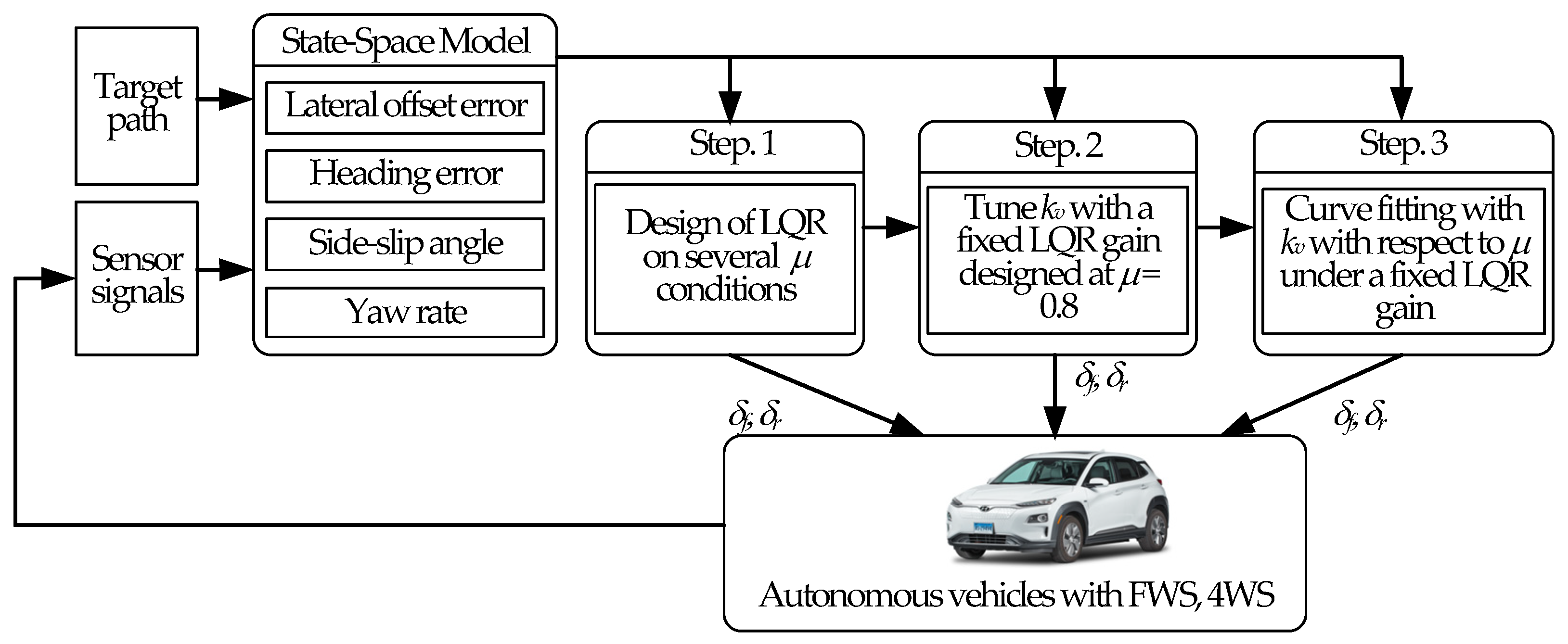
Figure 1 shows the schematic diagram of the path-tracking controller with the APDS proposed in this paper. As shown in
Figure 1, the proposed APDS consisted of three steps. The first step was to design the LQR on several
μ conditions. The second step was to tune the preview distance or the velocity gain,
kv, with a fixed LQR gain, designed on the road where
μ was 0.8. The third step was to apply curve fitting to
kv with respect to
μ.
2.1. Derivation of State-Space Model
In the context of PTC, a 2-DOF bicycle model was selected to represent a vehicle, as discussed in the literature [
16,
17,
18,
19,
20,
21,
23,
24,
25,
26,
27,
31,
32,
33,
34,
35,
36,
38,
42,
43].
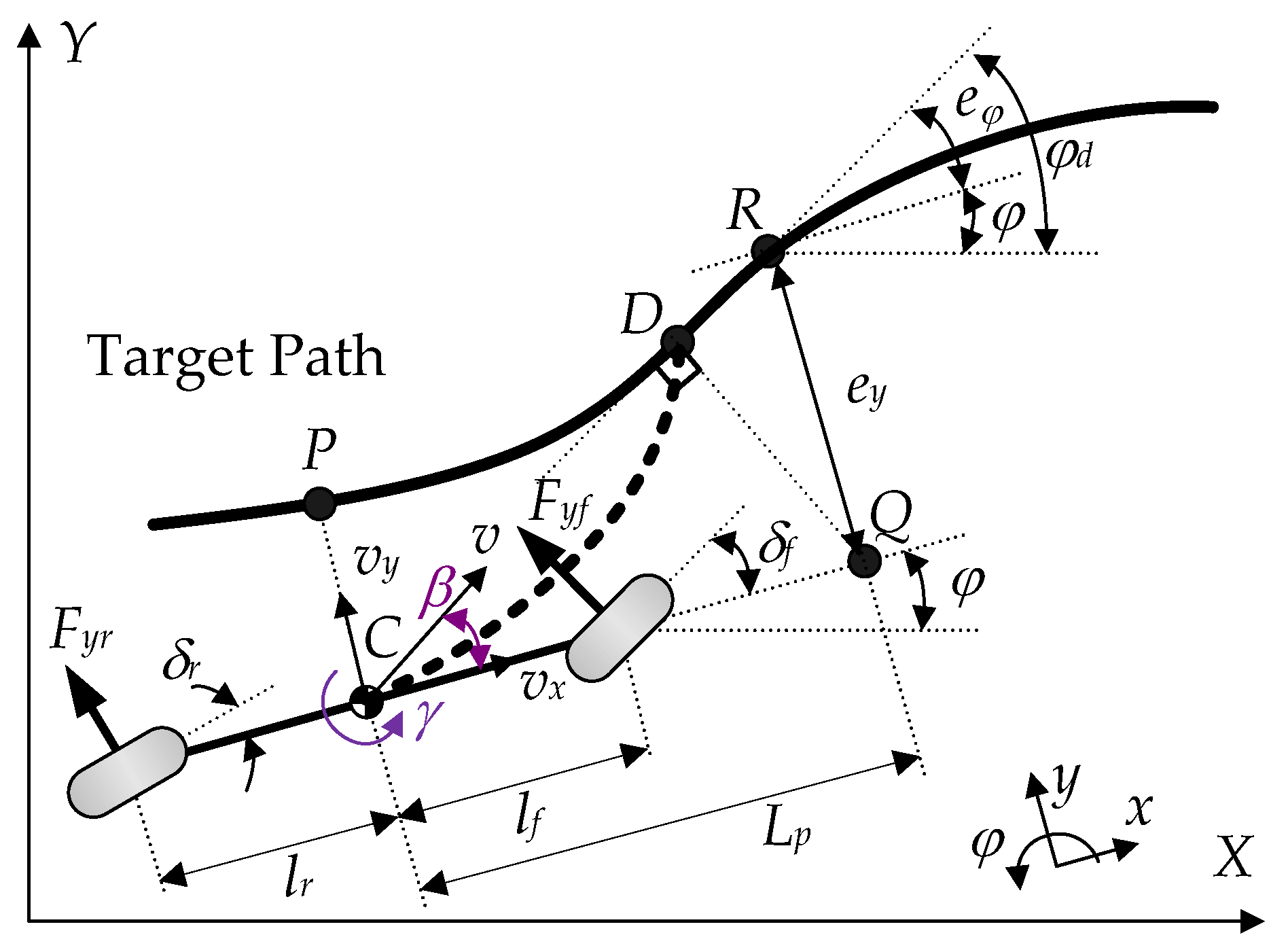
Figure 2 outlines the coordinates and variables used to describe this model, along with the target path for path tracking. This model is focused on modeling the yaw and lateral motions of a vehicle while assuming a constant longitudinal velocity,
vx. The state variables were the yaw rate,
γ, and the side-slip angle,
β, which is defined as the ratio between the longitudinal and lateral velocities. The equations of motion (1) were established [
16,
17]. The tire-slip angles,
κf and
κr, at the front and rear wheels were defined, as in (2), and the calculation of linear lateral tire forces,
Fyf and
Fyr, is detailed in (3). By combining (1), (2), and (3), the time derivatives of the state variables for the bicycle model were derived, as in (4).
The literature on PTC introduces the lateral offset error,
ey, and the heading error,
eφ, at the point
P, as shown in
Figure 2. For better path-tracking performance, this paper adopted a look-ahead or preview function, drawing upon the work of various researchers [
37,
38,
39,
40,
41,
42,
43]. The preview distance,
Lp, was determined, as in (5). Here,
kv is a velocity gain, which stands for the preview interval. The adaptive preview distance scheme proposed in this paper is to tune
kv according to the variations in
μ. In
Figure 2, point
C corresponds to the center of gravity (C.G.). The preview point, labeled as
Q, and the point
R on the target path were determined based on the computed look-ahead distance,
Lp. At the point
R, the time derivatives of the errors,
ey and
eφ, were calculated, as in (6), while assuming that
eφ was limited to be less than 10° and, accordingly, was approximated as sin
eφ ≈
eφ:
Utilizing the state variables
ey,
eφ,
β, and
γ, the state vector,
x, the disturbance,
w, and control input,
u, were established, as in (7). The state-space equation for the path-tracking control system, as presented in (8), is a result of the integration of (4), (6), and (7). Within (8), the matrices for the system, the disturbance, and the control input are denoted by
A,
B1, and
B2:
The control input, denoted as
u in (7), comprises two elements: front steering angle,
δf, and rear steering angle,
δr. These elements were used to define two distinct control inputs,
uFWS and
u4WS, corresponding to input configurations, FWS and 4WS. Derived from (9), the input matrices
B2,FWS and
B2,4WS were determined, as in (10), with
B2(
i) representing the
i-th column of matrix
B2 [
16]:
2.2. Design of LQR
The input configurations, FWS and 4WS, had associated objective functions denoted as
JFWS and
J4WS, which are presented in (11). These functions have been transformed into the vector-matrix format, as demonstrated in (12). The matrices
Q and
Ri in (12) are defined in (13). The determination of the weight,
ρi, was accomplished through the utilization of Bryson’s rule, as outlined in (14), where
ξi is crucial, as it represents the maximum allowable value for the respective terms [
16,
17,
43,
44]. The procedure for tuning in path tracking was executed by making adjustments to
ξi. The control input, denoted as
uFWS and
u4WS within the LQR framework, was calculated in accordance with (15). It is essential to mention that
Pi represents the solution to the Riccati equation for FWS and 4WS:
2.3. Constraint on Tire-Slip Angle
It is well known that the lateral tire force,
Fy, is a function of the tire-slip angle,
α, and tire–road friction,
μ. Generally, front and rear steering angles,
αf and
αr, are easily saturated on low
μ roads. After saturation, lateral tire forces generated by steering angles are reduced [
45,
46]. As a result, cornering or tracking performance is deteriorated. To overcome the problem, it is necessary to constrain the front and rear steering angles with tire-slip ones [
43].
It is assumed that the lateral tire force,
Fy, has its maximum,
Fy,max, at the tire-slip angle,
κmax. If the tire-slip angle,
κ, is larger than
κmax,
Fy is saturated and smaller than
Fy,max. For that reason,
κ should be constrained to be smaller than
κmax, as shown in (16). In the case of this condition, a path-tracking controller cannot provide the maximum performance. By combining (16) with (2), (17) was derived. From (17), the constraints on the steering angles,
δf and
δr, were obtained, as in (18). The constraints, as in (18), were applied to the steering angles obtained from LQR. In this paper,
κmax was set to 5°. In order to facilitate (18), the measurement or estimation of
β is essential. However, it is hard to measure
β with an onboard sensor in real vehicles. For this reason, it is necessary to estimate
β with an observer or an estimator. To estimate
β, a Kalman Filter was selected in this paper [
47]:
2.4. Adaptive Preview Distance Scheme
As mentioned earlier, the APDS proposed in this paper aimed to tune the velocity gain, kv, according to the variations in μ. In this paper, μ was divided from 0.3 to 0.8 at 0.1 intervals. The vehicle speed was fixed at 60 km/h.
The scheme consisted of three steps. The first step was to design the LQR by tuning the velocity gain,
kv, and the weights in
JFWS and
J4WS on the road where
μ was 0.8. We denoted these LQR gains as
KFWS (0.8) and
K4WS (0.8). With those fixed gains, the second step was to tune
kv to achieve the best path-tracking performance for each
μ, from 0.3 to 0.7. The third step was to apply curve fitting to those velocity gains with respect to
μ. For curve fitting, an exponential function, (19), was selected. If
μ is known a priori, the best
kv on the corresponding
μ is easily obtained from the fitted exponential function, (19):
As shown in the APDS, the LQR gain was fixed once it was designed. The only tuning parameter was the velocity gain,
kv. This is quite simple, compared to the previously proposed methods that used fuzzy reasoning [
37,
38,
41,
42]. However, it is necessary to tune
kv for each
μ, which is identical to a gain-scheduling controller.
When designing LQR in the first step, μ was selected as 0.8. If μ was selected as 0.3, the LQR showed severe overshoot on high μ roads because the gain of LQR designed on low μ road had large gains. On the contrary, if μ was selected as 0.8 in the first step, then the LQR would not show overshoot on low μ roads because the LQR gains were smaller.
3. Performance Measures for Path-Tracking Control
In the area of PTC,
ey and
eφ were selected as a measure, which is needed to assess the path-tracking performance. On the contrary, this paper adopted different measures from
ey and
eφ used in the conventional PTC. The measures were defined from the vehicle trajectory on a double-lane-change maneuver for collision avoidance, which was selected as the target path [
16,
17,
26,
38,
43].
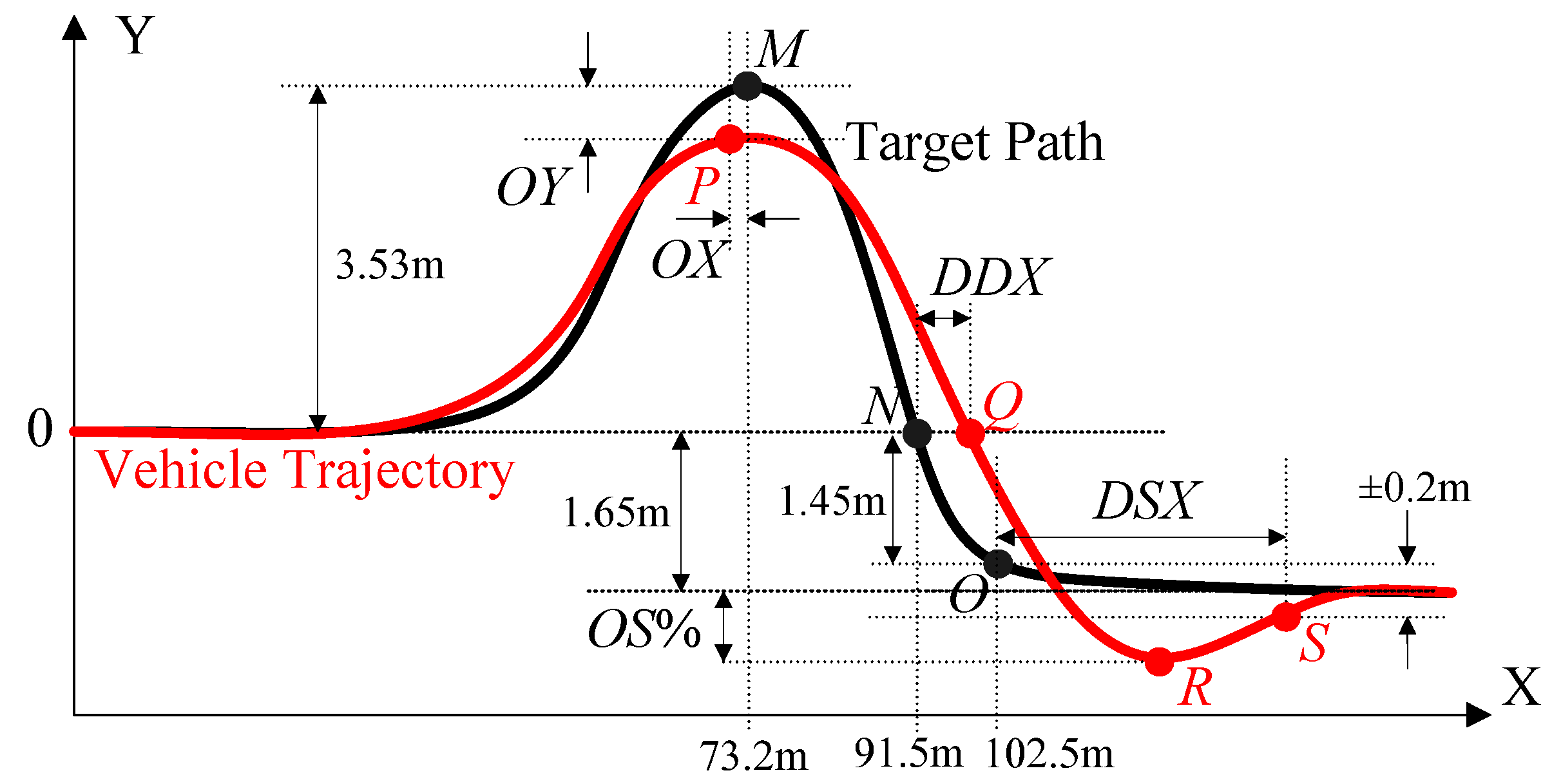
Figure 3 shows both the vehicle’s trajectory and the target path. In this paper, five measures, representing path-tracking performance, were defined, as in (20), based on the points along the target path and the vehicle’s trajectory: the peak’s center offset,
OX, the peak’s lateral offset,
OY, the percentage overshoot,
OS%, the response delay,
DDX, and the settling delay,
DSX. These measures are depicted in
Figure 3. In (20), X and Y in the parentheses correspond to the x- and y-positions of the points,
M,
N,
O,
P,
Q,
R, and
S, respectively. In essence, smaller absolute values of these measures corresponded to improved path-tracking performance:
In
Figure 3,
OX and
OY represent the agility and reachability of the path-tracking controller, respectively. In this study, if
OY exceeded −0.05 m, the path-tracking performance was regarded as satisfactory. In this paper, the LQR was tuned such that
OY was near −0.02 m.
OS% implies lateral damping, which reflects agility. In this paper, if
OS% remained less than 16% = 0.85 m, it was considered that the performance was satisfactory.
DDX corresponds to response delays, signifying the agility of longitudinal motion. This measure is exactly proportional to
μ.
DSX can be interpreted as settling time, indicating the convergence speed of the vehicle’s lateral motion toward a target y-position, i.e., −1.65 m. In this paper, if
DSX was less than 16 m, it was considered that the performance was satisfactory. Generally, the best performance was attained when OS% was near 1%, provided that Δ
Y was larger than −0.05 m. More comprehensive explanations of these metrics can be found in [
16,
17,
43].
It is natural that OX and DDX increase as μ decreases. In other words, these variables are hard to reduce using the LQR. If kv increases for a longer preview distance, then OX and OY decrease. For this reason, it is necessary to tune kv and the weights in the LQ objective function simultaneously. From this idea, the APDS was proposed.
4. Simulation and Discussion
A simulation was performed to verify the path-tracking performance of the proposed APDS in terms of the five measures presented in (20). The LQRs, i.e.,
KFWS and
K4WS, were implemented and designed on MATLAB/Simulink 2019a, connected with CarSim [
48]. A target path in
Figure 3 was selected as a test scenario. In the simulation, the F-segment sedan model provided in CarSim was selected [
48]. From the model, the parameters of the bicycle model can be found in [
16,
17]. The steering actuators of FWS and 4WS were modeled as the 1st-order system, where the time constant was 0.05. When designing the LQRs, the speed controller in CarSim was applied in order to keep the constant speed, 60 km/h.
4.1. First Step: Design of LQR for Several μ Conditions
In this section, LQRs with FWS and 4WS were designed for each
μ, divided from 0.3 to 0.8 at intervals of 0.1. This was achieved by tuning
kv and the weights,
ξi, in
JFWS and
J4WS for different
μ values.
Table 1 and
Table 2 show the tuning results of LQRs with FWS and 4WS for each
μ. The values of the five measures on the same
μ condition, as shown in
Table 1 and
Table 2, were nearly identical to one another. This means that FWS and 4WS can yield identical results, and that 4WS is not needed for path tracking.
Table 3 and
Table 4 show the simulation results of
KFWS (0.8) and
K4WS (0.8) with the corresponding
kv values. As shown in
Table 3 and
Table 4, the path-tracking performance was deteriorated because
μ was not considered. Especially, the performance deterioration was severe at low conditions, such as 0.3 and 0.4.
As shown in
Table 1 and
Table 2, the velocity gain,
kv, became larger as
μ decreased. In other words, a larger
kv is needed in low
μ conditions. These results imply that the preview distance,
Lp or
kv, should be adjusted according to the variations in
μ. From
Table 1 and
Table 2,
KFWS (0.8) and
K4WS (0.8) were obtained. We denoted the first step as CASE1.
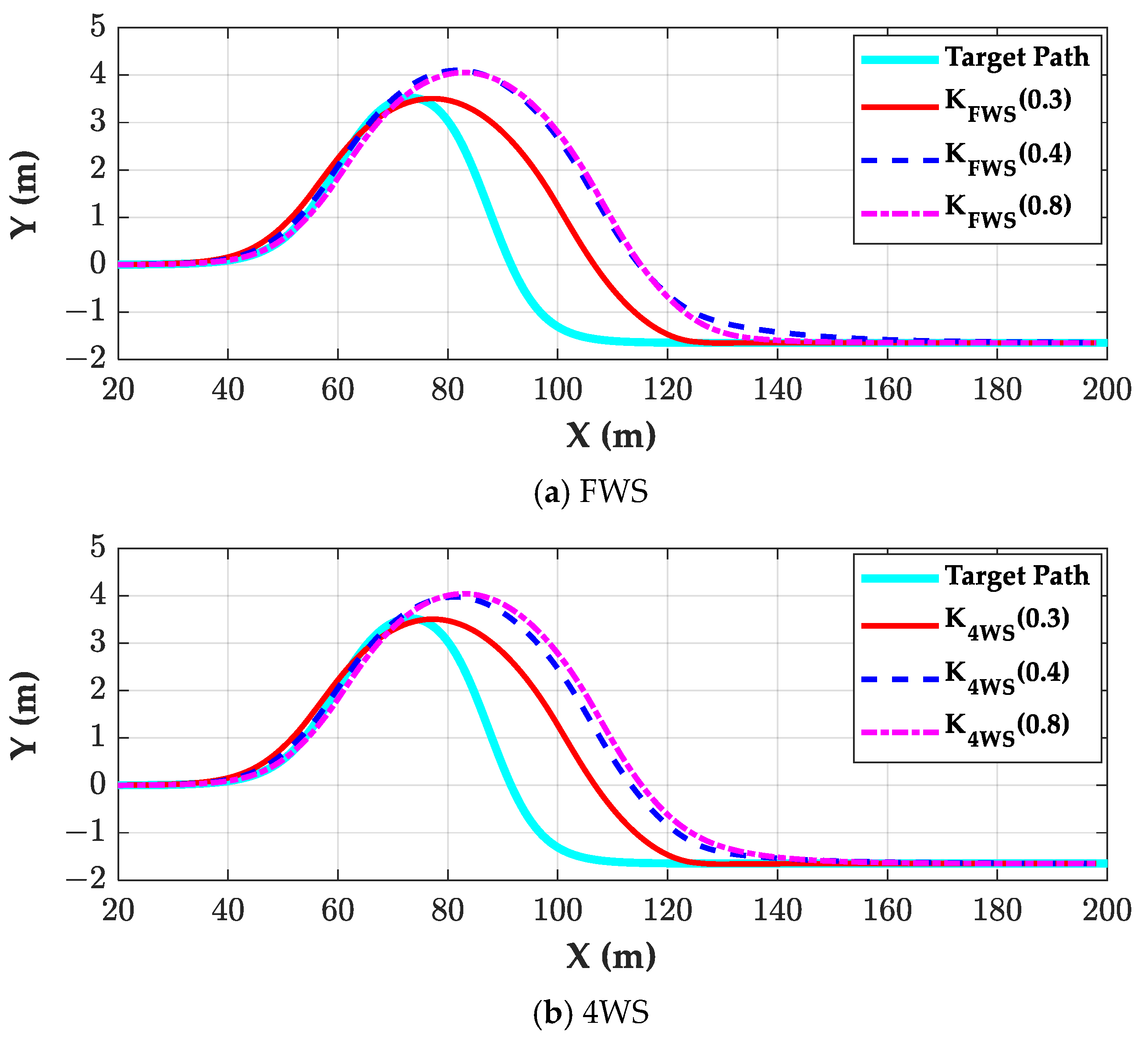
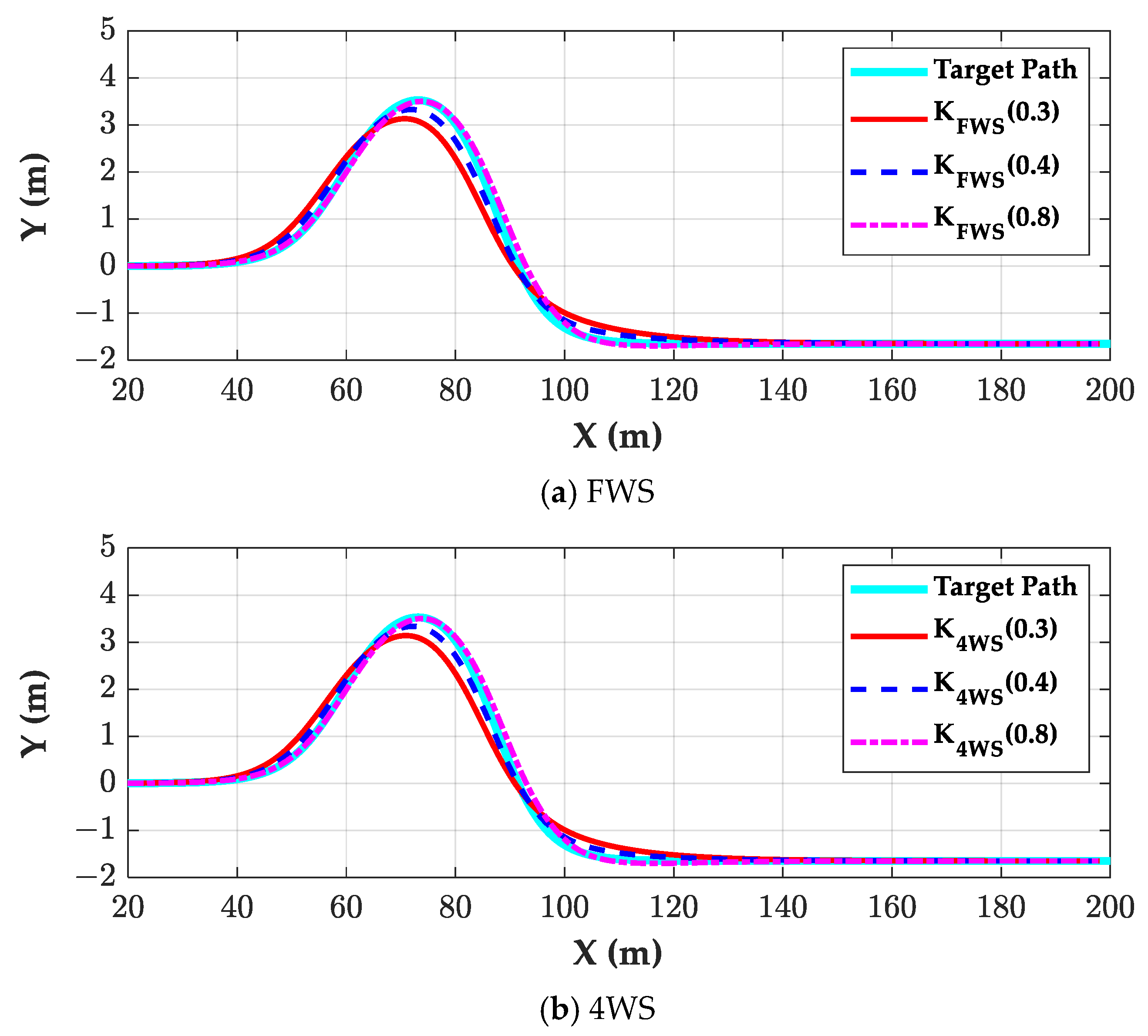
Figure 4 and
Figure 5 show the simulation results of
KFWS (0.8) and
K4WS (0.8) on the road where
μ was 0.3 and 0.8, respectively. In
Figure 4,
KFWS (0.3) and
K4WS (0.3) were the best controllers for FWS and 4WS, respectively. Similarly, in
Figure 5,
KFWS (0.8) and
K4WS (0.8) were the best controllers for FWS and 4WS, respectively.
As shown in
Figure 4, those controllers tuned on the road where
μ was 0.4 or 0.8 showed poor path-tracking performance because they were not designed on the road where
μ was 0.3. The controllers,
KFWS (0.4),
K4WS (0.4),
KFWS (0.8), and
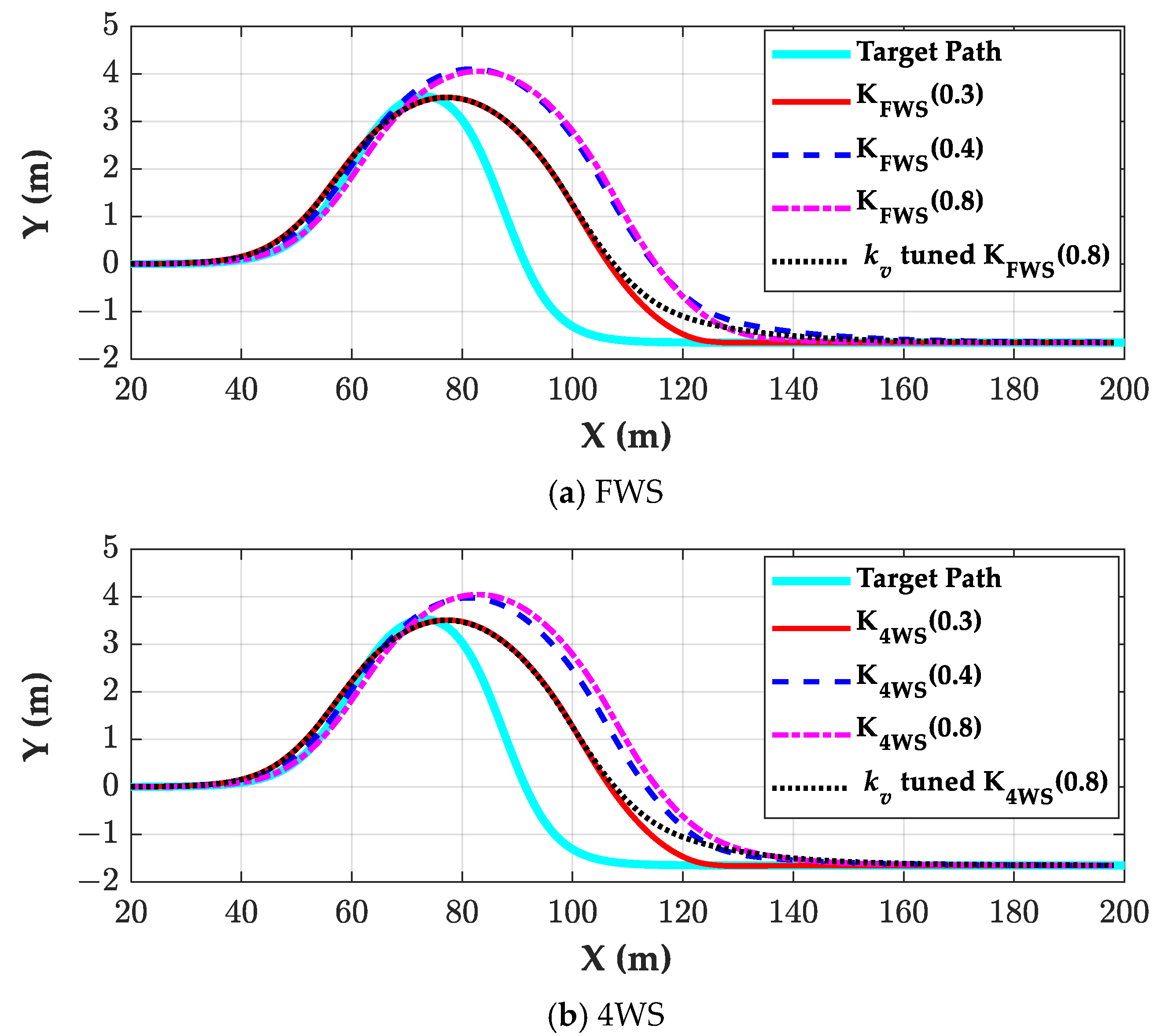
K4WS (0.8), showed large overshoot along the positive lateral direction. On the other hand, as shown in
Figure 5, those controllers tuned on the road where
μ was 0.3 or 0.4 showed poor path-tracking performance on the road where
μ was 0.8 because the preview distances of these controllers were too large. As a result, there were large negative
OY values, which can cause collision. Generally, a controller designed under low
μ conditions has a larger preview distance than those designed under high
μ conditions.
For better performance, the preview distance, Lp, or the velocity gain, kv, should be tuned with the fixed gains, KFWS (0.8) and K4WS (0.8), according to the variations in μ. This was performed in the second step.
4.2. Second Step: Tuning of kv Under Different μ Conditions with Fixed LQR Gains
In this section, the velocity gain, kv, was tuned with the fixed LQR gains, i.e., KFWS (0.8) and K4WS (0.8), under different μ conditions. It should be noted that only kv was tuned for the best path-tracking performance.
Table 5 and
Table 6 show the tuning results of
kv for
KFWS (0.8) and
K4WS (0.8) under different
μ conditions. As shown in the tables, with the fixed gains, tuning the single parameter
kv could provide comparable results to those in
Table 1 and
Table 2, and improved results from
Table 3 and
Table 4. More specifically,
OX,
OY, and
DSX of
KFWS (0.8) on the road where
μ was 0.3 were improved from 10.34, 0.633, and 42.42 to 4.05, −0.020, and 32.39, respectively. In terms of
OX and
DSX, through the tuning of
kv, those values were reduced by 60% and 24%, respectively. However, in the second step,
DSX values were deteriorated on the road where
μ was 0.3 or 0.4. This was inevitable because the lateral tire force was small under low
μ conditions.
As mentioned earlier, this step did not need different gains under corresponding μ conditions. It needed only a single fixed gain, i.e., KFWS (0.8) or K4WS (0.8). We denoted the second step as CASE2.
Figure 6 shows the simulation results of the tuned
kv with
KFWS (0.8) and
K4WS (0.8) on the road where
μ was 0.3. As shown in
Figure 6, the tuned
kv values with
KFWS (0.8) and
K4WS (0.8) showed good path-tracking performance, compared to the tuning results in
Table 1 and
Table 2. However, there were large differences among the settling delays,
DSX, in
Table 1 and
Table 5, and
Table 2 and
Table 6. On the contrary, the values of
OX and
OY in
Table 1 and
Table 5, and
Table 2 and
Table 6 were nearly identical to one another. This indicates that collision avoidance was satisfied with the tuned
kv with
KFWS (0.8) and
K4WS (0.8), regardless of the magnitude of
DSX.
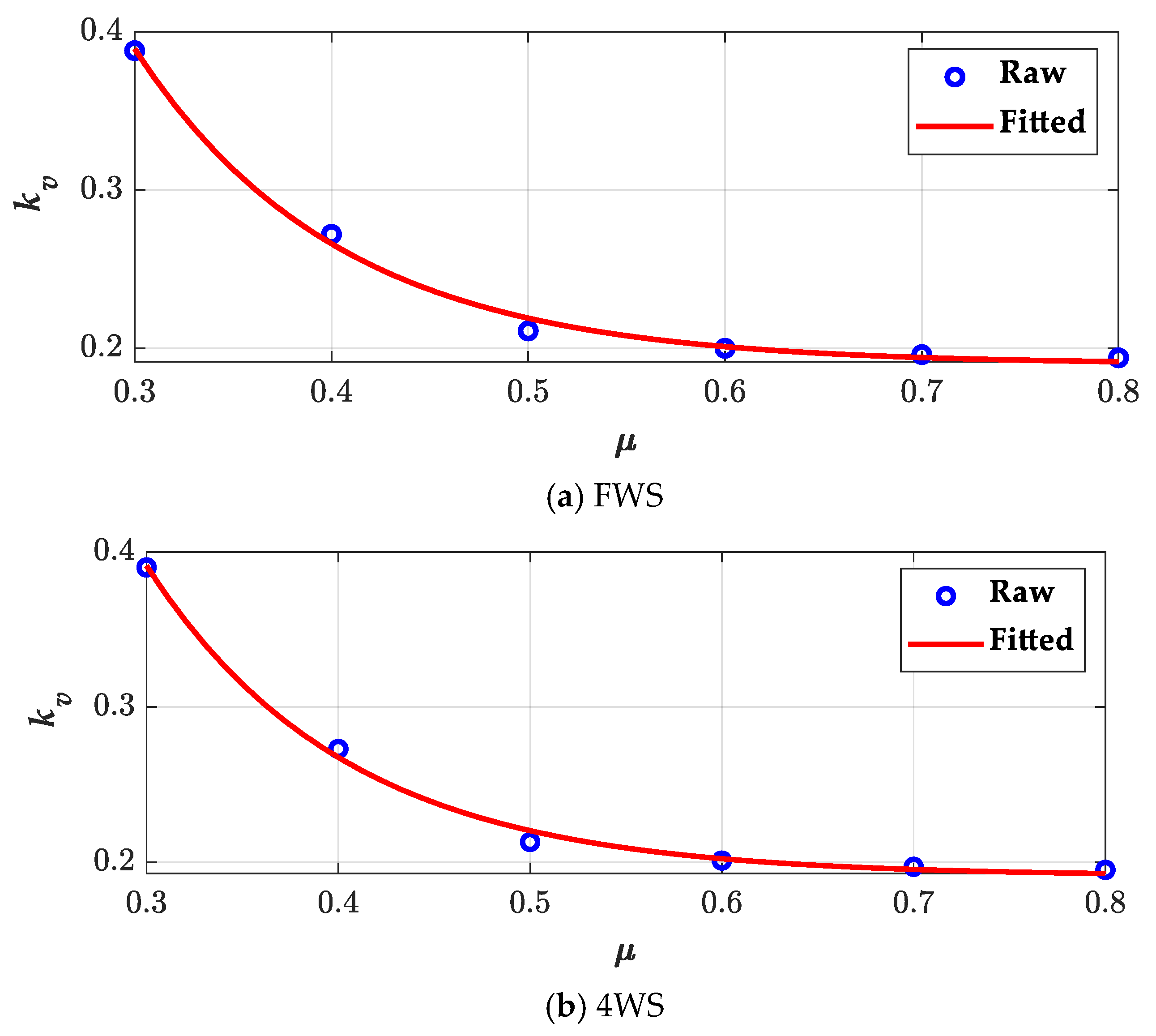
4.3. Third Step: Curve Fitting with the Velocity Gain, kv, with Respect to μ
In this section, curve fitting was applied to the tuned
kv values in
Table 5 and
Table 6 for
KFWS (0.8) and
K4WS (0.8) with respect to
μ. For curve fitting, the exponential function in (19) was adopted.
Figure 7 shows the curve-fitting results of
kv with respect to
μ for FWS and 4WS. As shown in
Figure 7, the velocity gains were well fitted with the exponential function, and there were little differences between FWS and 4WS.
To validate the curve fitting of
kv over
μ, a simulation was performed using the exponentially fitted
kv with
KFWS (0.8) and
K4WS (0.8) under different
μ conditions. To emphasize the estimation performance of the curve fitting,
μ was divided from 0.3 to 0.8 at intervals of 0.05.
Table 7 and
Table 8 show the simulation results of the exponentially fitted
kv for FWS and 4WS. As shown in the tables, the performance of the APDS was comparable to the results in
Table 5 and
Table 6. We denoted the third step as CASE3.
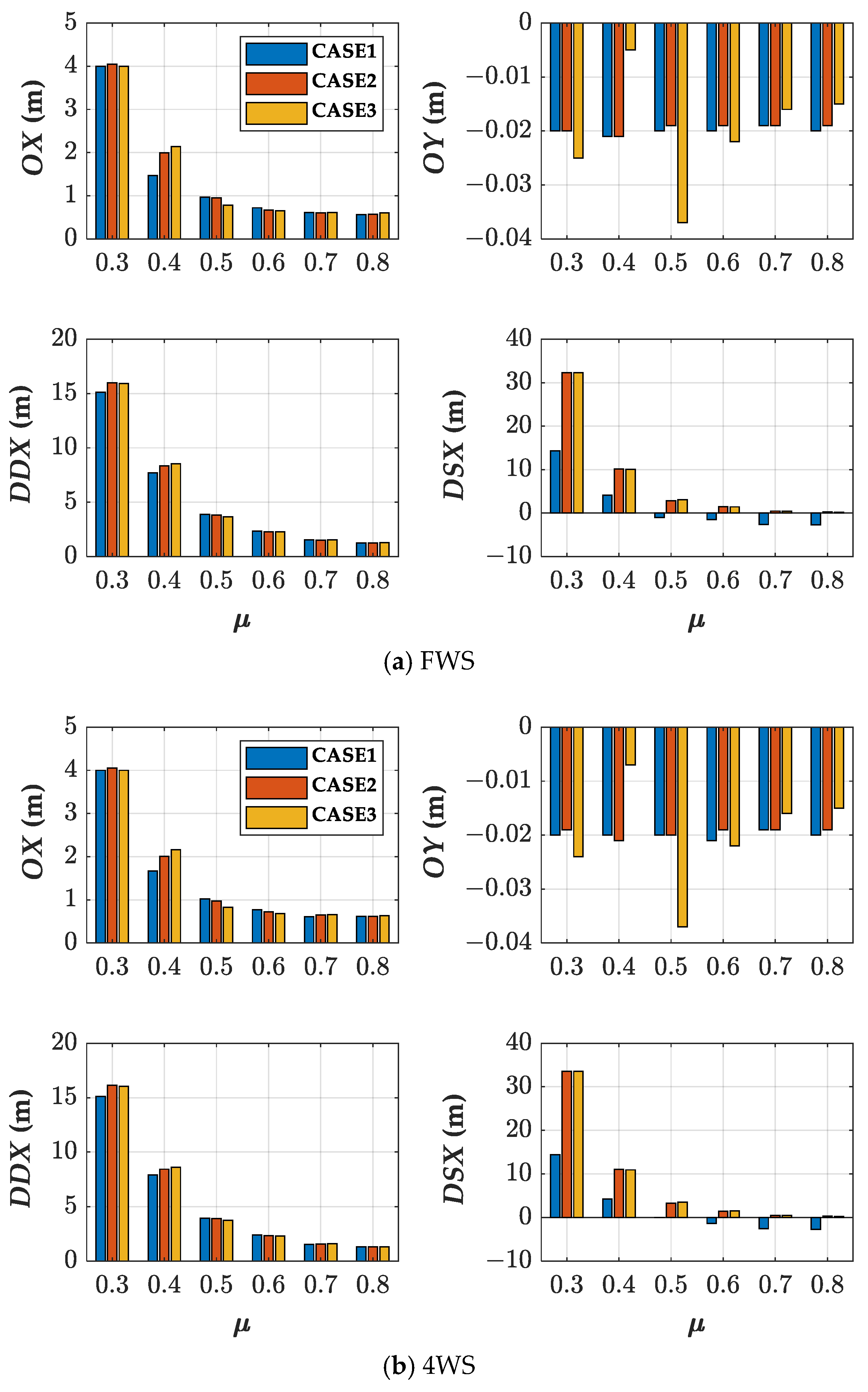
Figure 8 shows the comparison results among the three cases, CASE1, CASE2, and CASE3, for FWS and 4WS. As shown in
Figure 8, there were small differences among
OX,
OY, and
DDX for different
μ conditions. However, there were large differences among
DSX on the road where
μ was 0.3 and 0.4. These results mean that the proposed APDS was effective for different
μ conditions.
Figure 8 shows that there were little differences between FWS and 4WS. This indicates that additional actuators, such as 4WIB and 4WID, had little influence on the performance of the APDS.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}