
RFWBS Model: Multilevel Hybrid Mapping Solution Framework for Designing Neurorehabilitation Physiotherapy Devices


Abstract
1. Introduction
- (1)
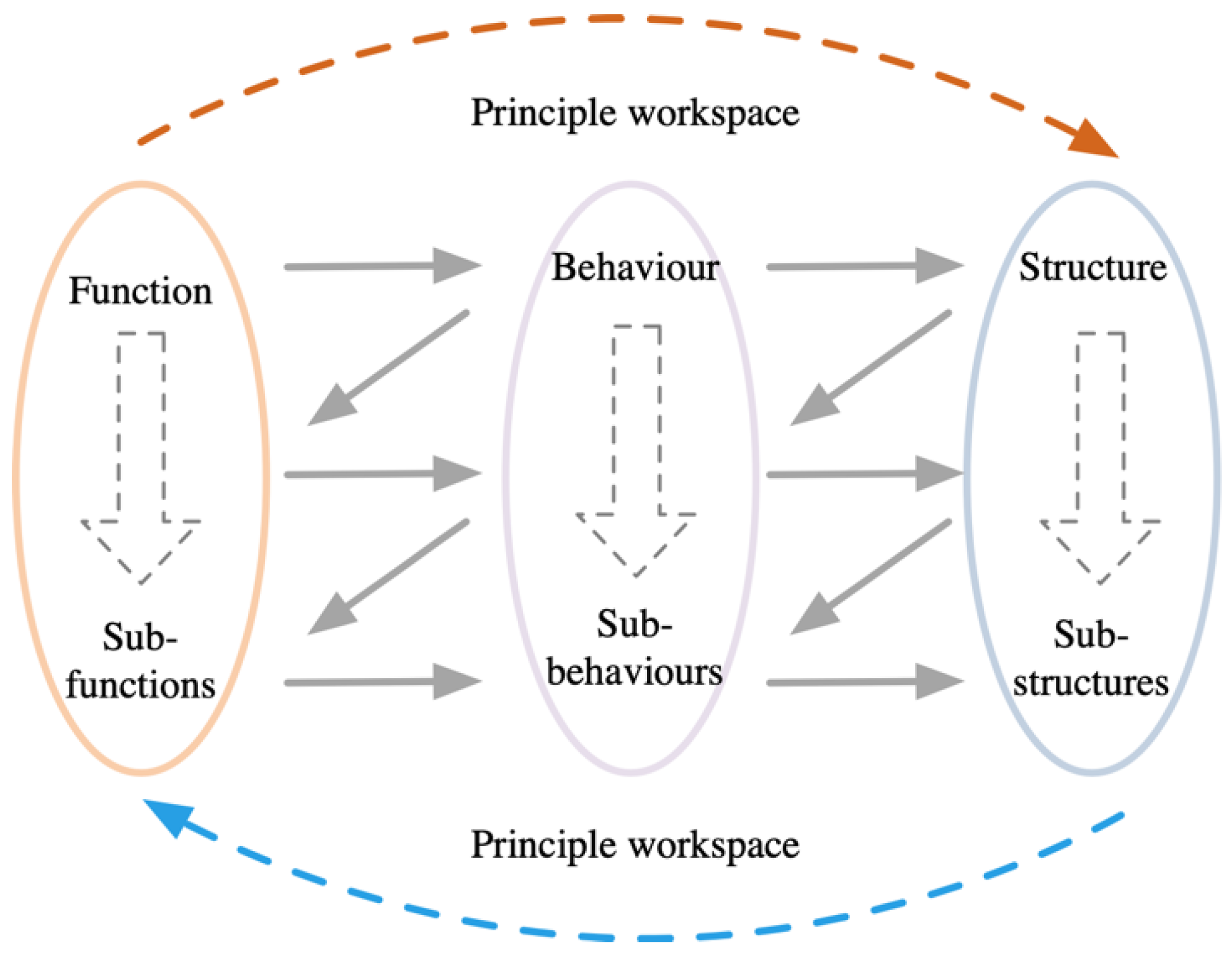
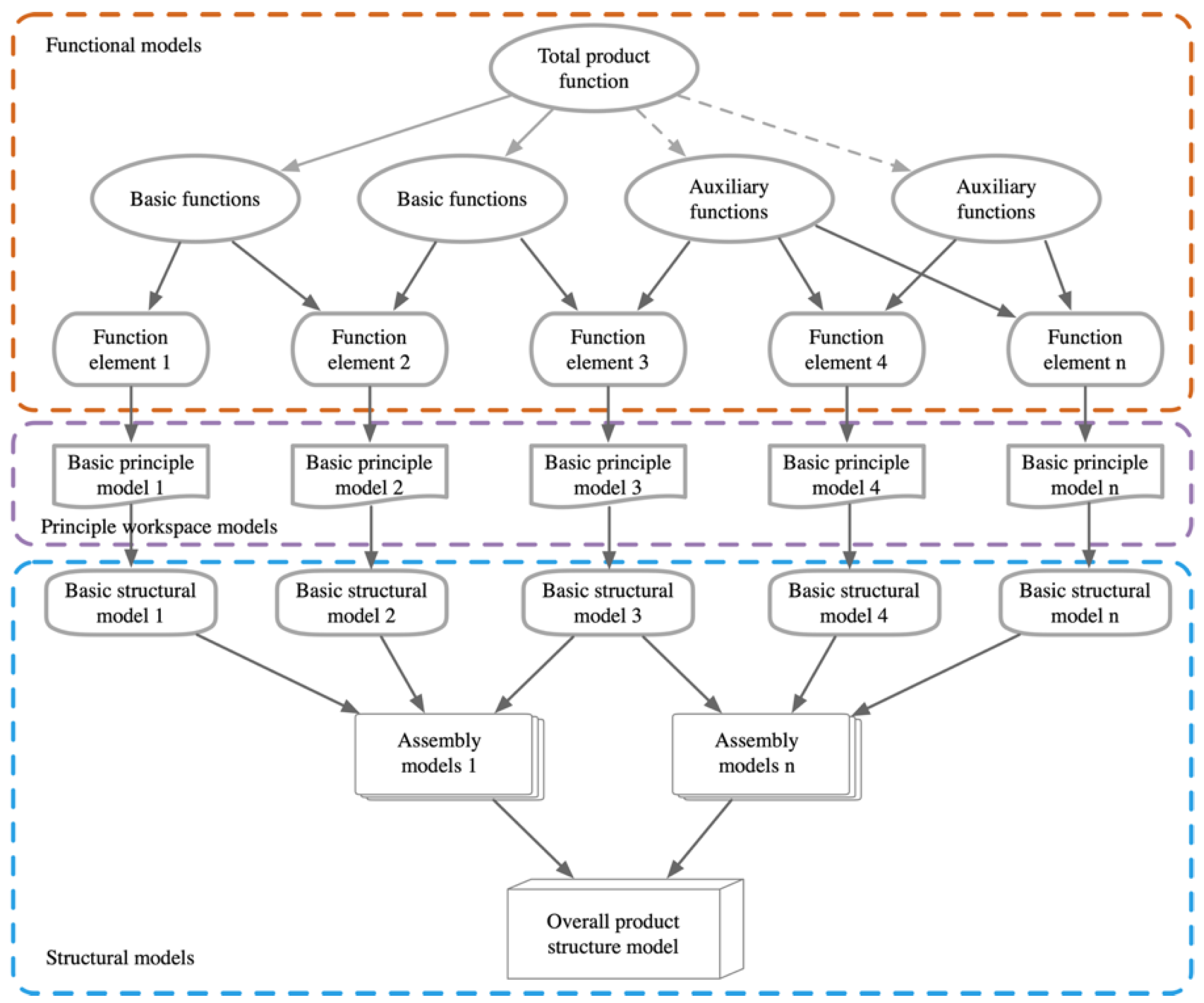
- The existing FBS model has been optimized by incorporating considerations of user requirements and the principle workspace. A fundamental framework supporting conceptual product design modeling has been proposed. This establishes a hierarchical study of complex product modularization within the product architecture, investigating the correlations among functionality, principles, behavior, and structure.
- (2)
- Multi-level hybrid mapping solutions have been applied to the RFWBS model, studying modular reconstruction design methods. Combining key elements of innovative design for neurorehabilitation therapy equipment, a design support platform for neurorehabilitation devices has been developed, creating a top-down iterative design decomposition model.
- (3)
- Building upon the product modular design theory of the RFWBS model, the extended RFWBS model has been employed in the design of neurorehabilitation therapy equipment. Addressing product functional requirements, a variant-driven approach has been used to drive the configuration design from user requirements. Taking a specific neurorehabilitation robotic glove as the design subject, the method’s rationality has been validated through kinematic and dynamic analyses.
2. Methodology
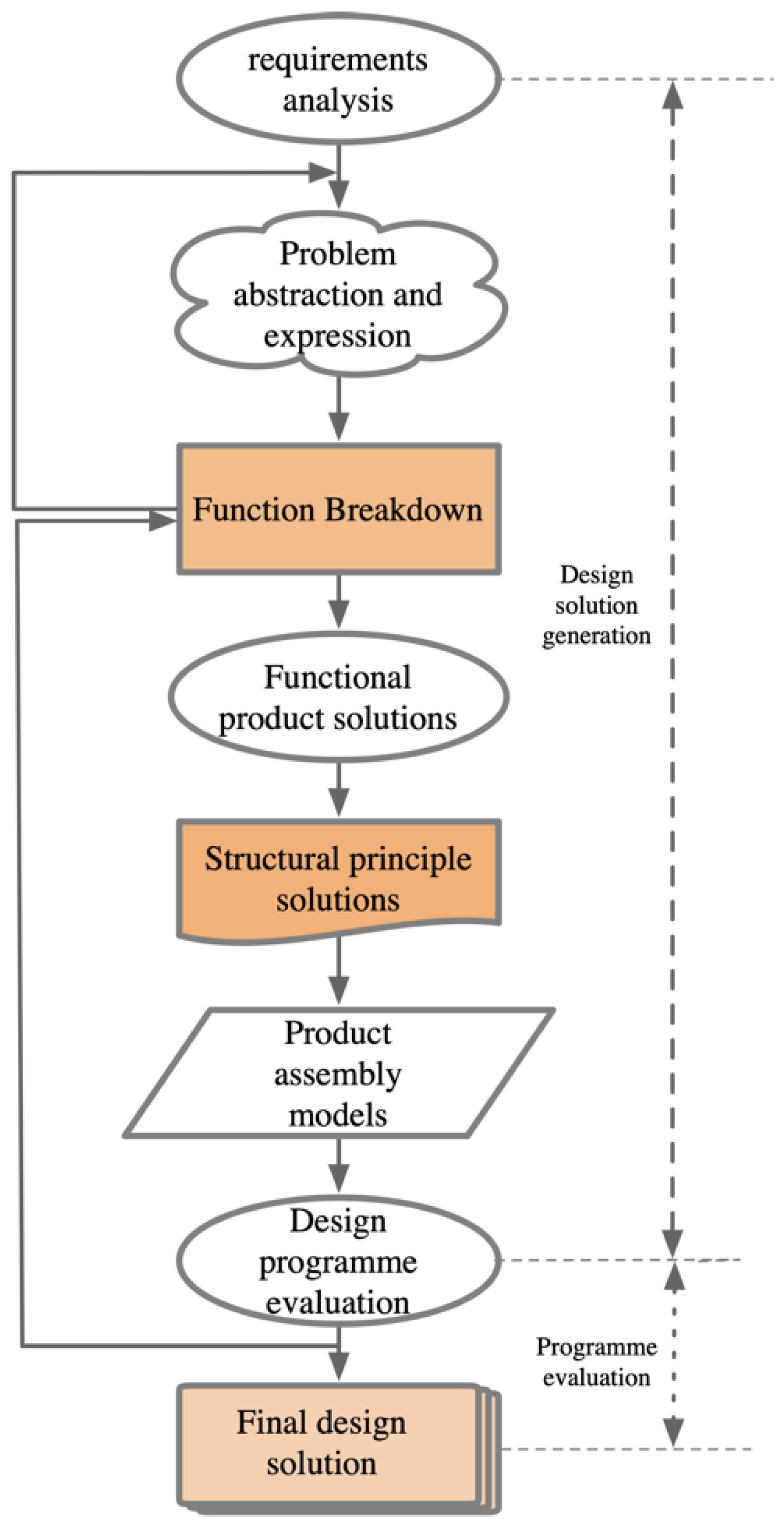
2.1. Product Design Processes
2.1.1. Function–Behavior–Structure Model
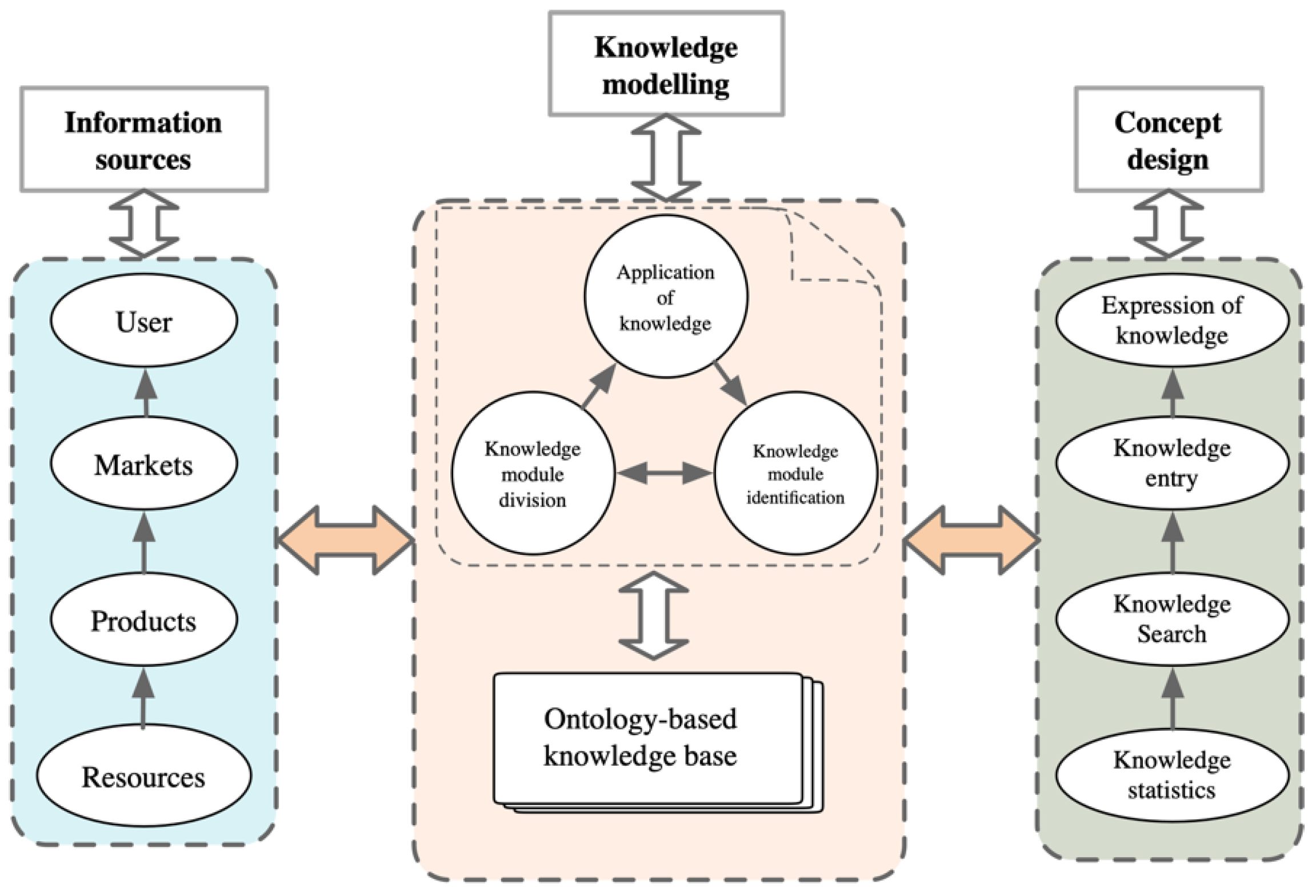
2.1.2. Ontology-Based Product Design
2.1.3. Knowledge System Framework
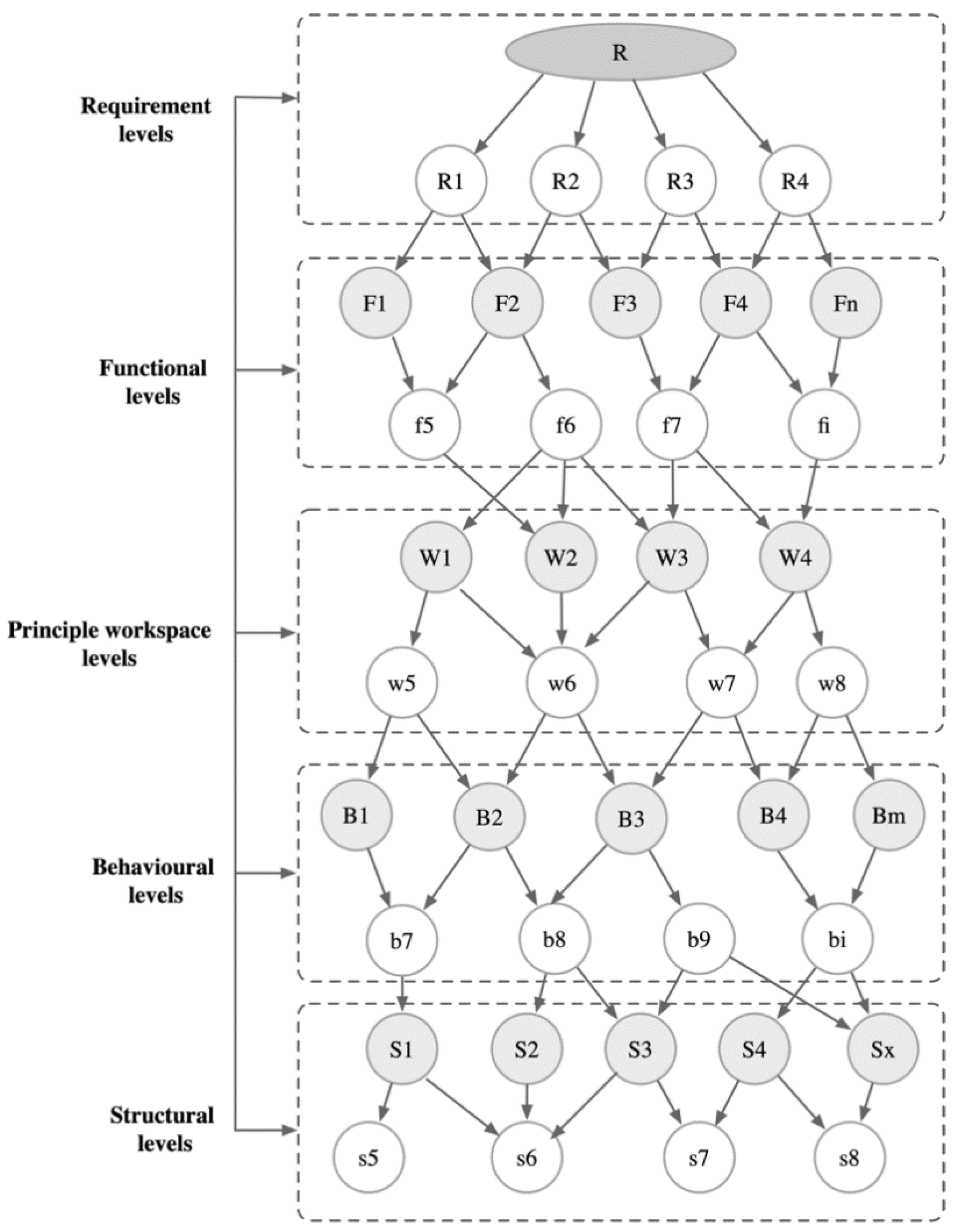
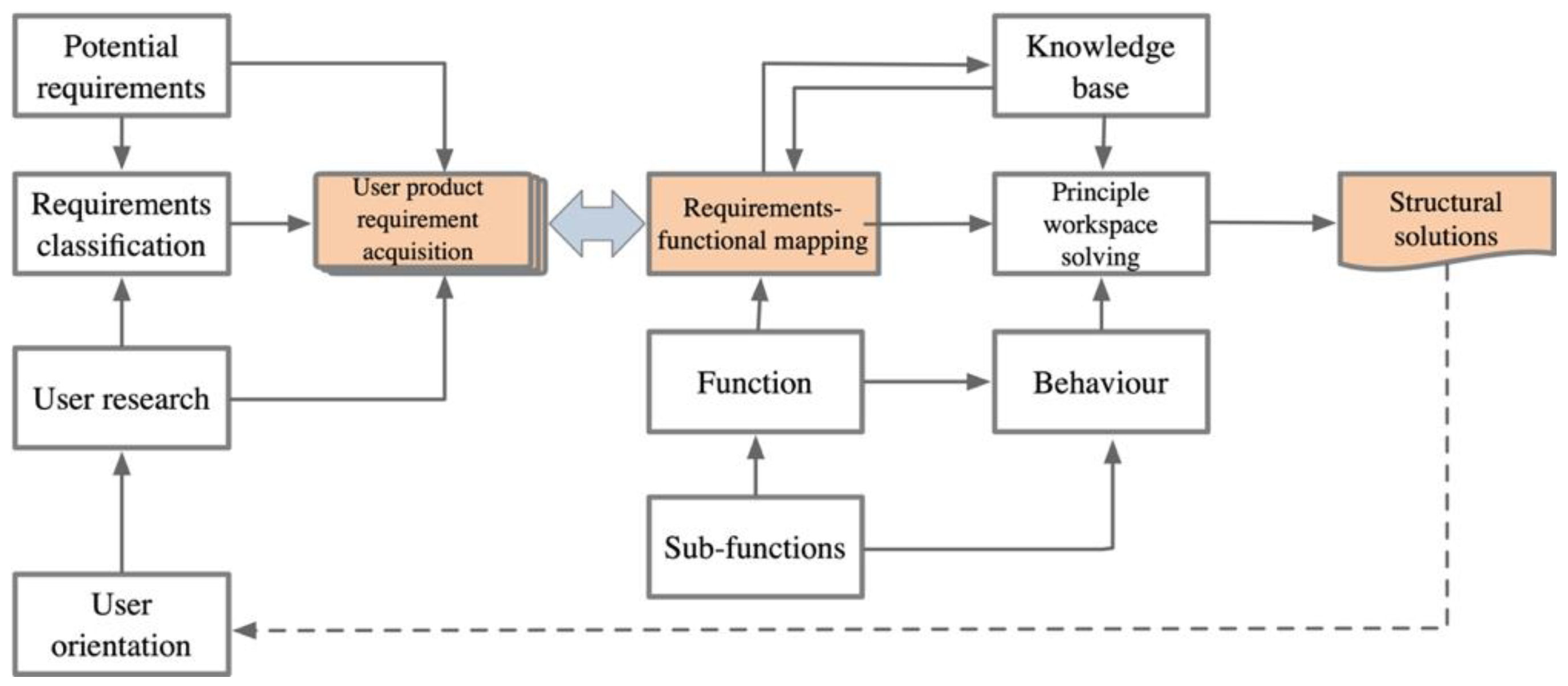
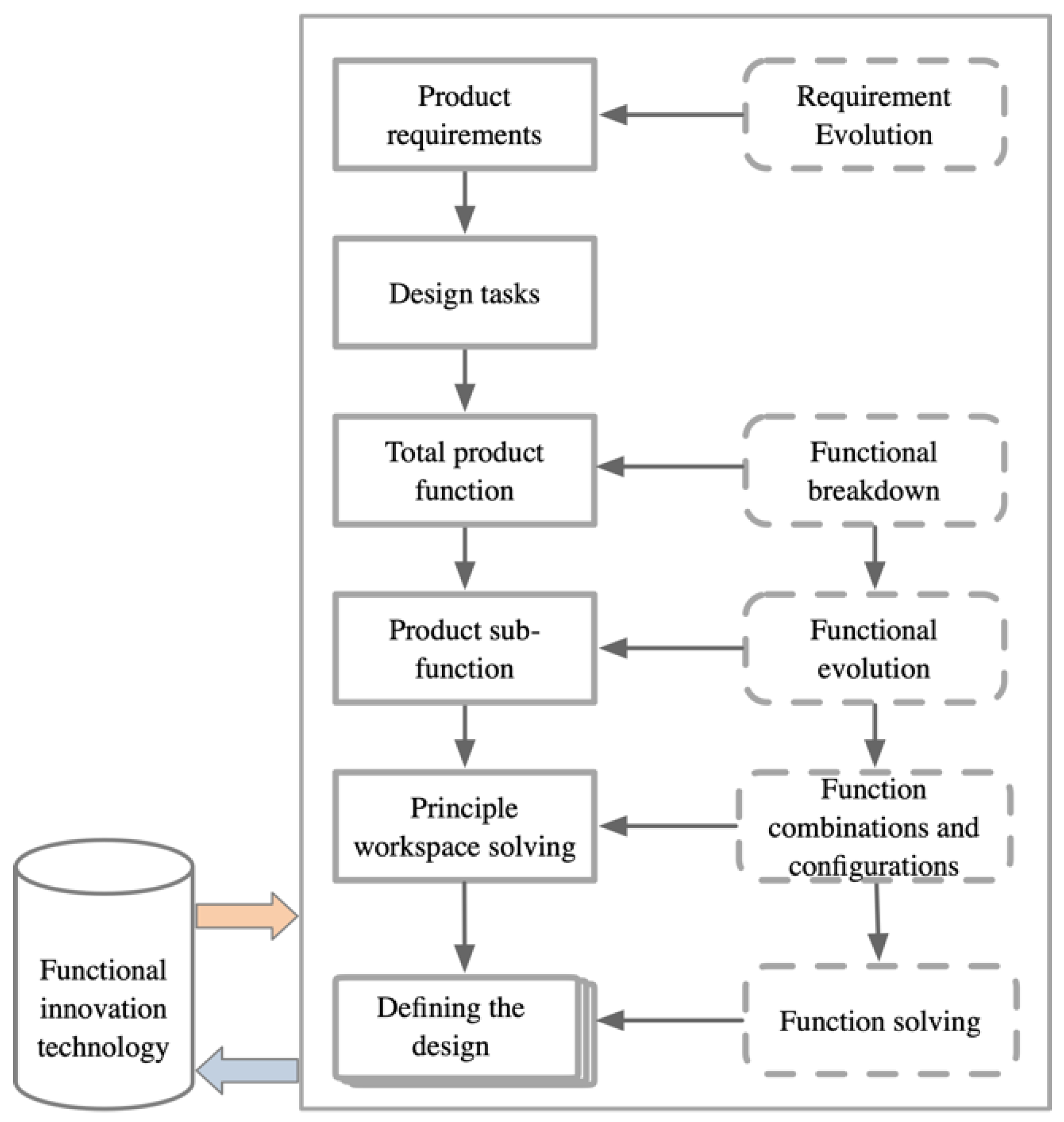
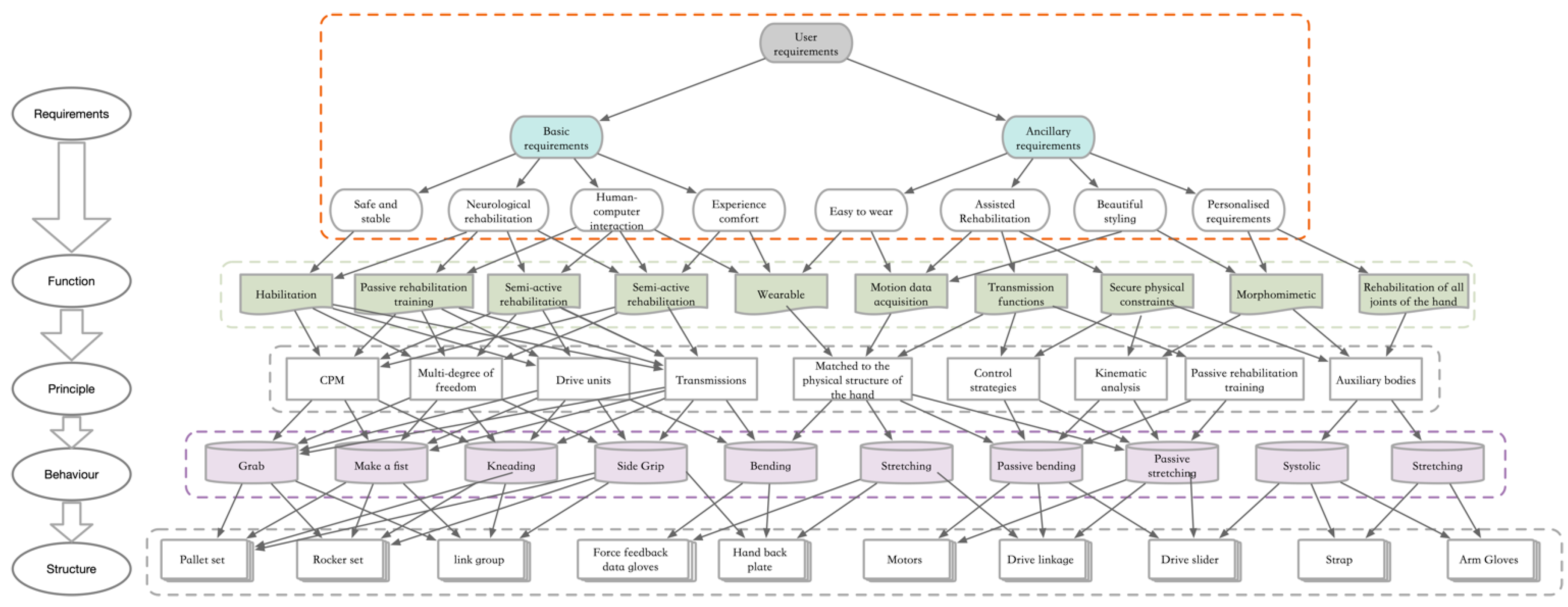
2.2. Proposed Model
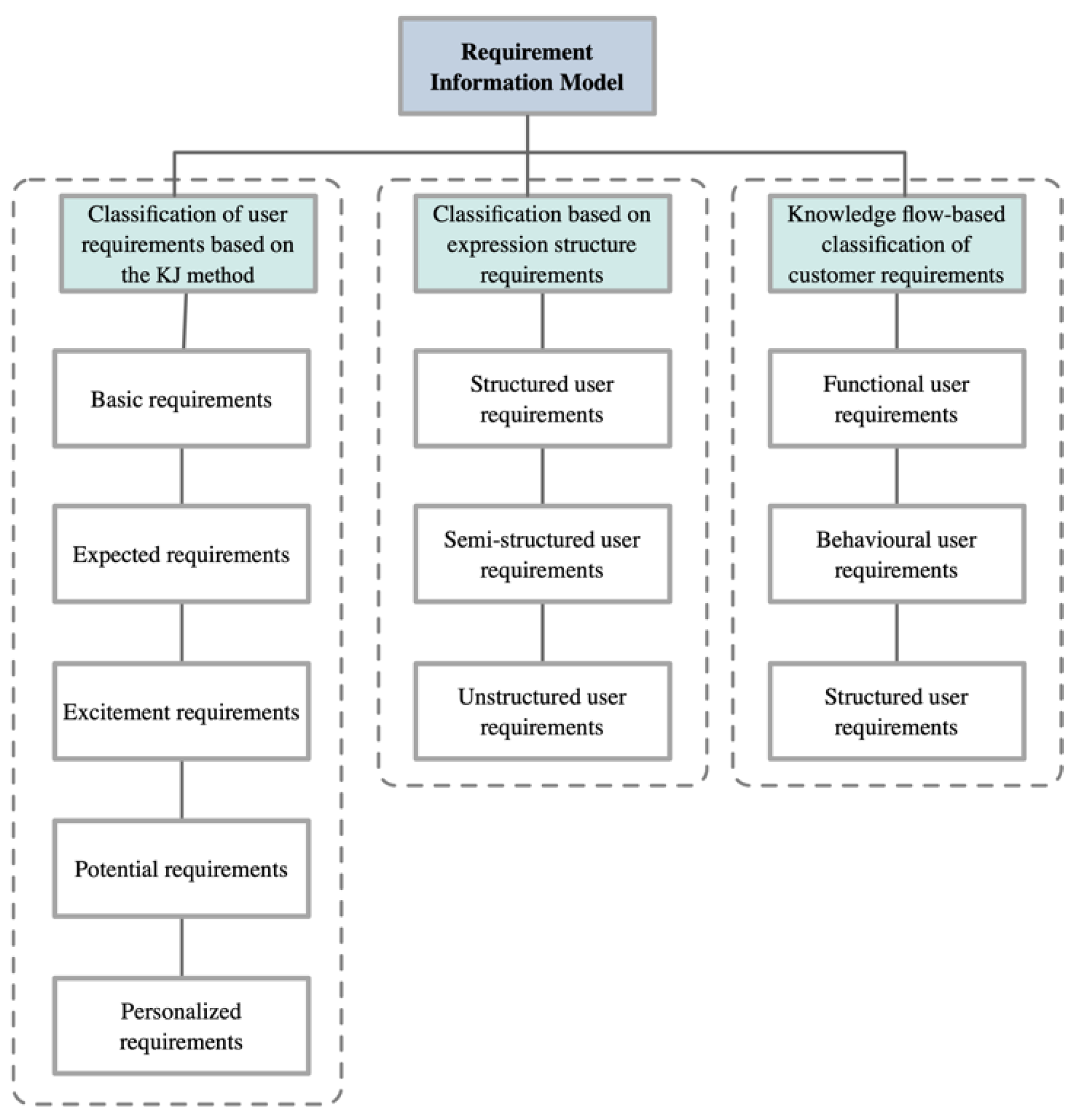
2.2.1. User Requirements Module
2.2.2. Functional Innovation and Behavioral Modules
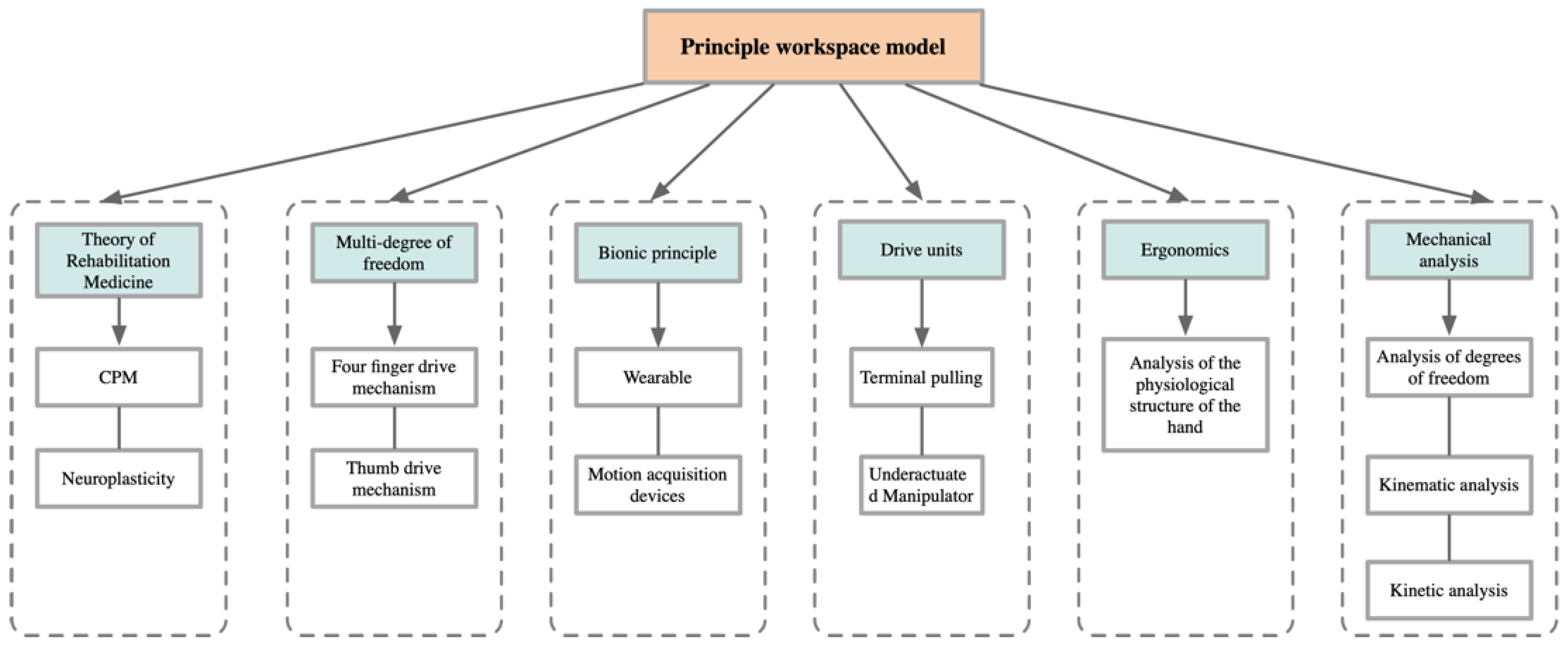
2.2.3. Principle Workspace Module
2.2.4. Structural Module
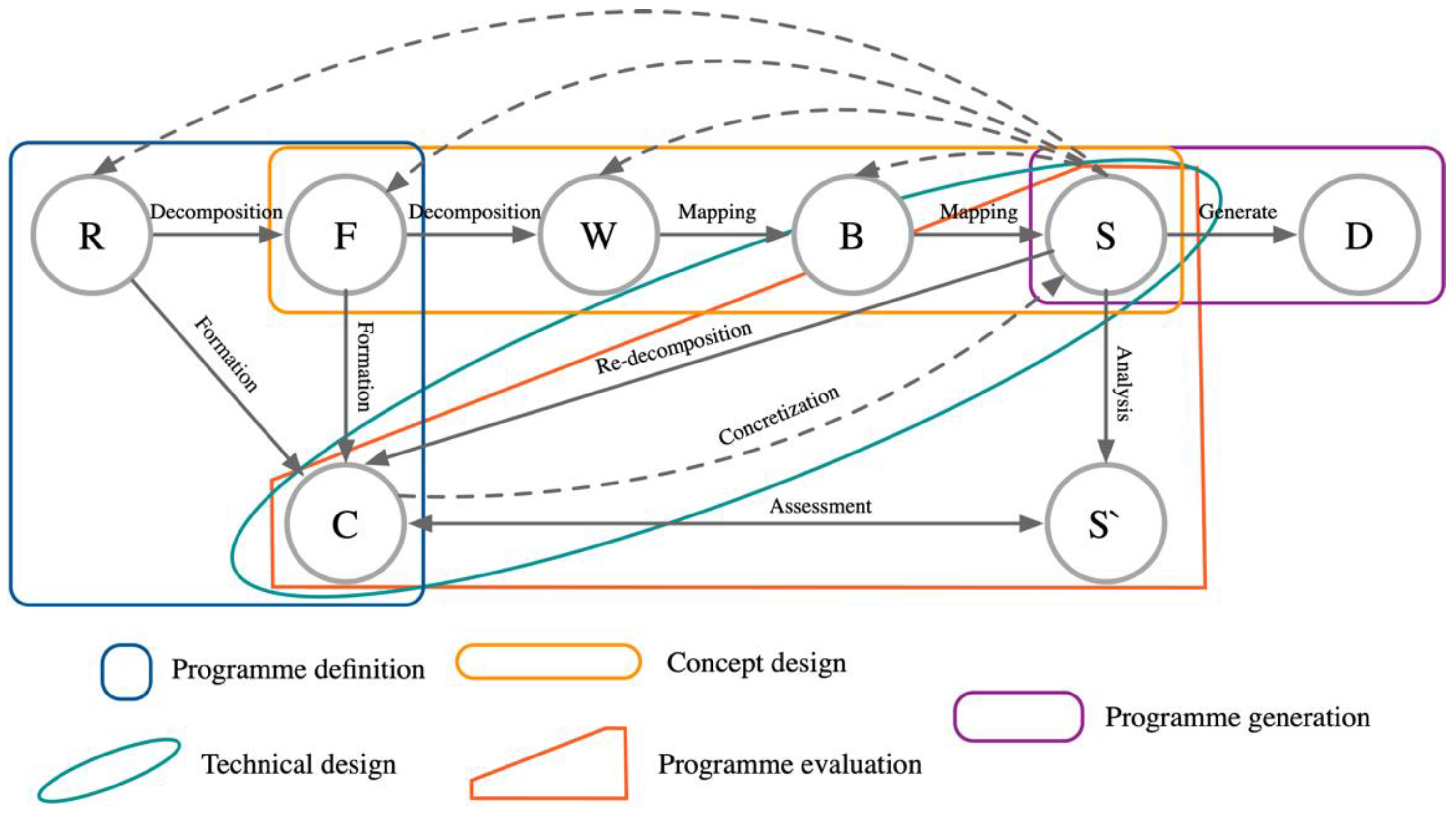
2.2.5. Iteration-Based RFWBS Model
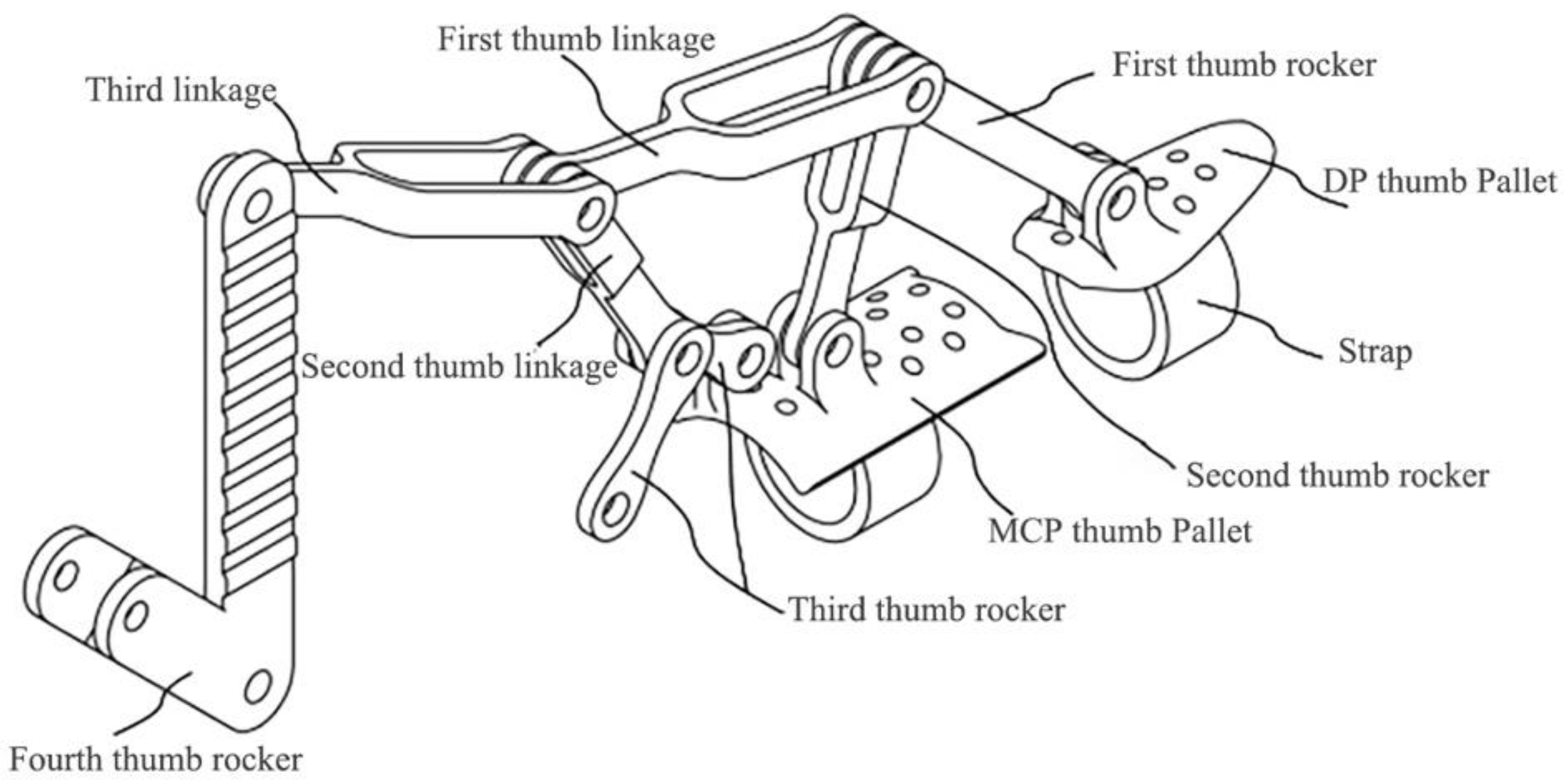
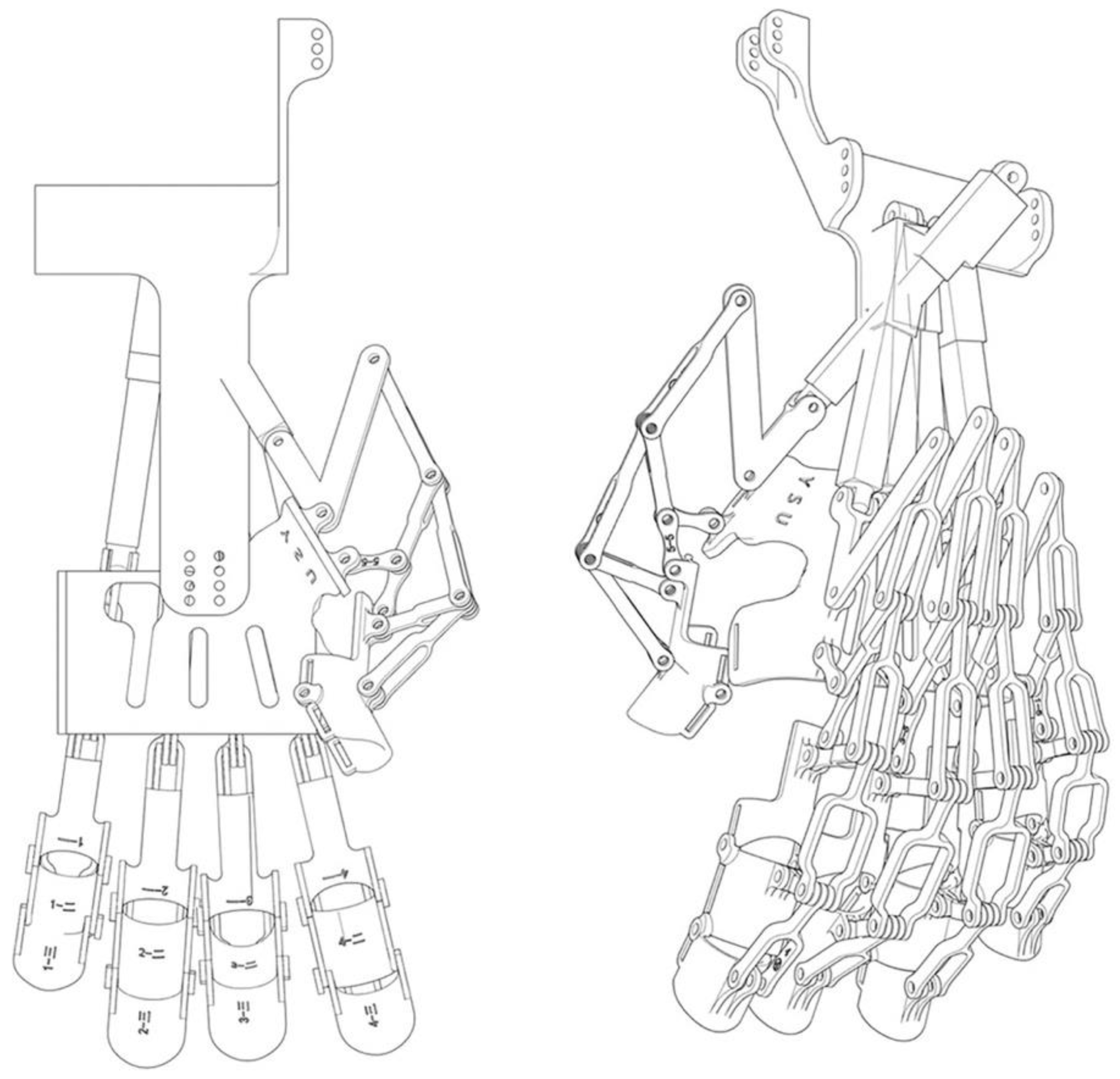
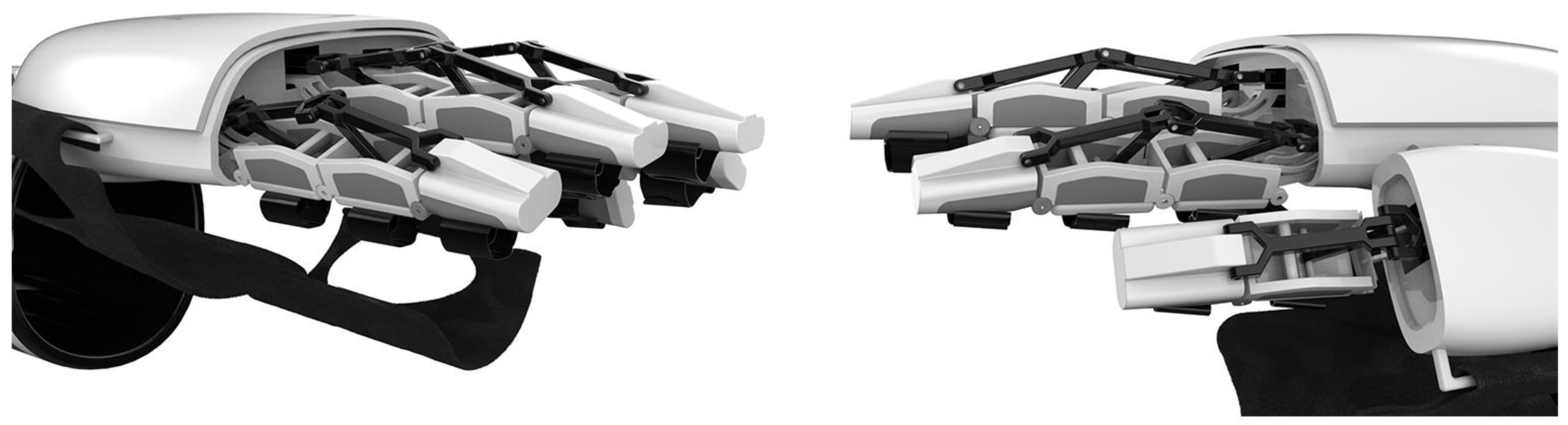
3. Application to Neurorehabilitation Manipulators
3.1. Analysis of User Requirements Dimensions
3.2. Module Configuration
3.3. Mapping of the RFWBS Model to the Neurorehabilitation Manipulator
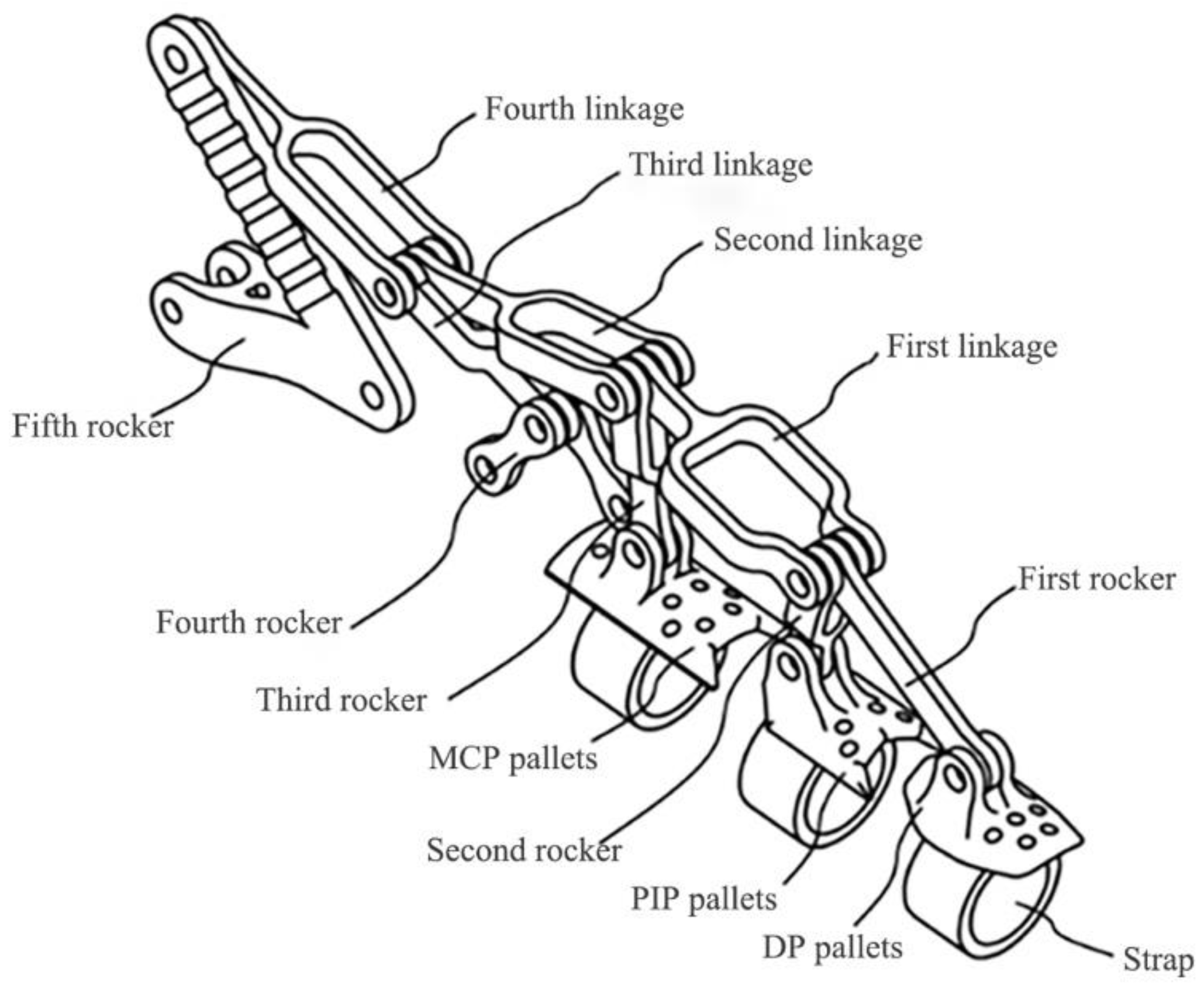
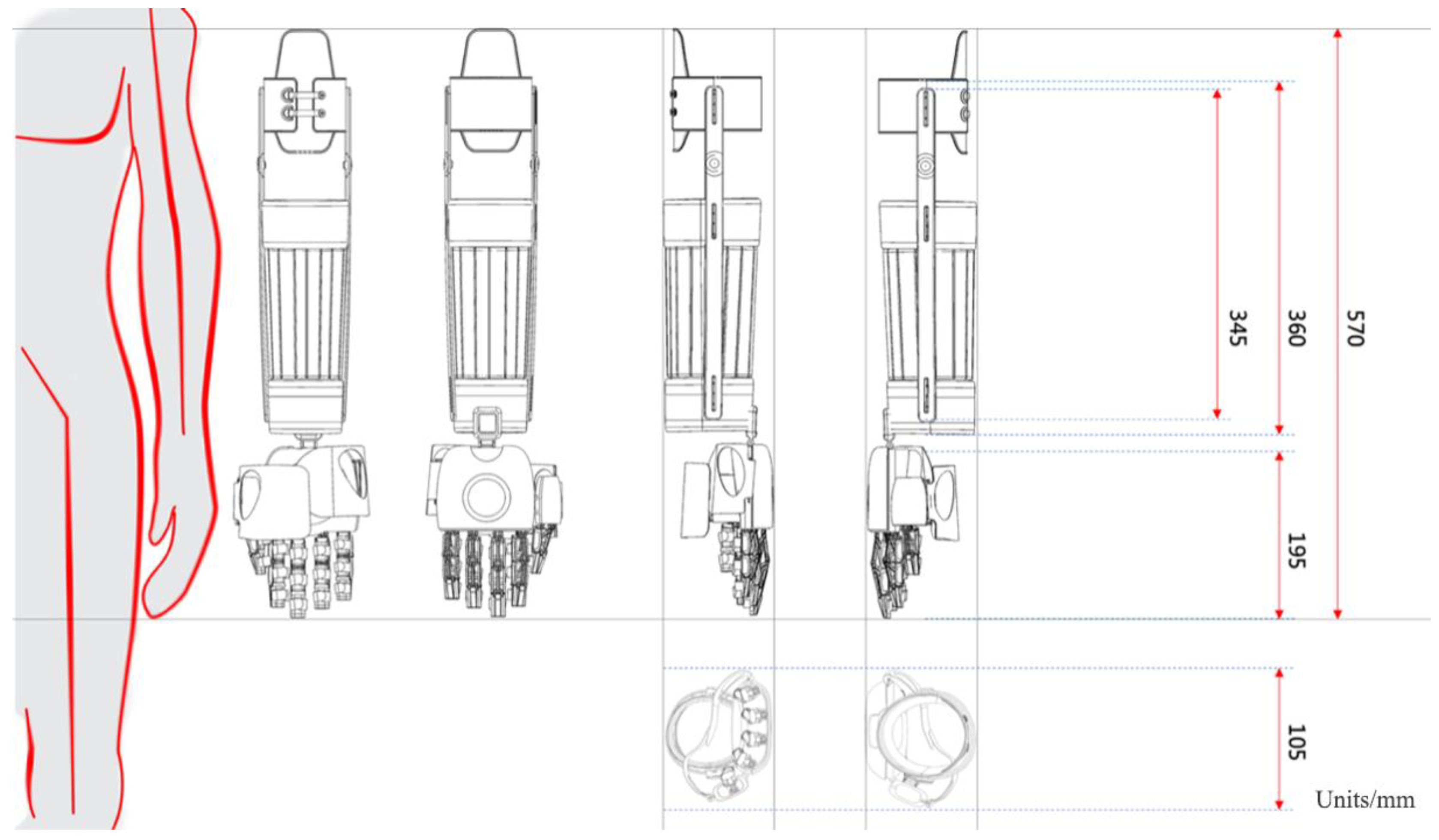
3.4. General Structural Configuration
3.5. Neurorehabilitation Robotic Program Generation
4. Simulation for Verification
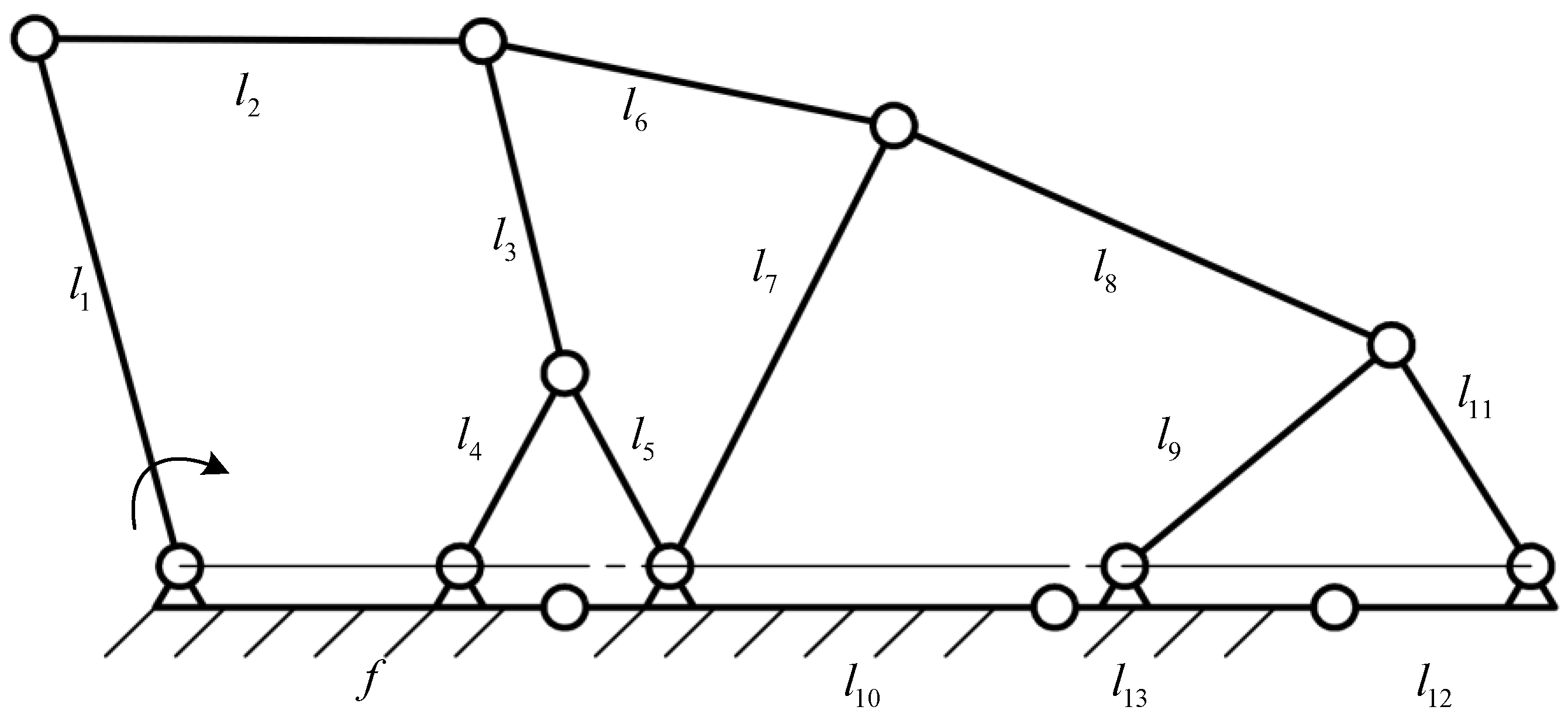
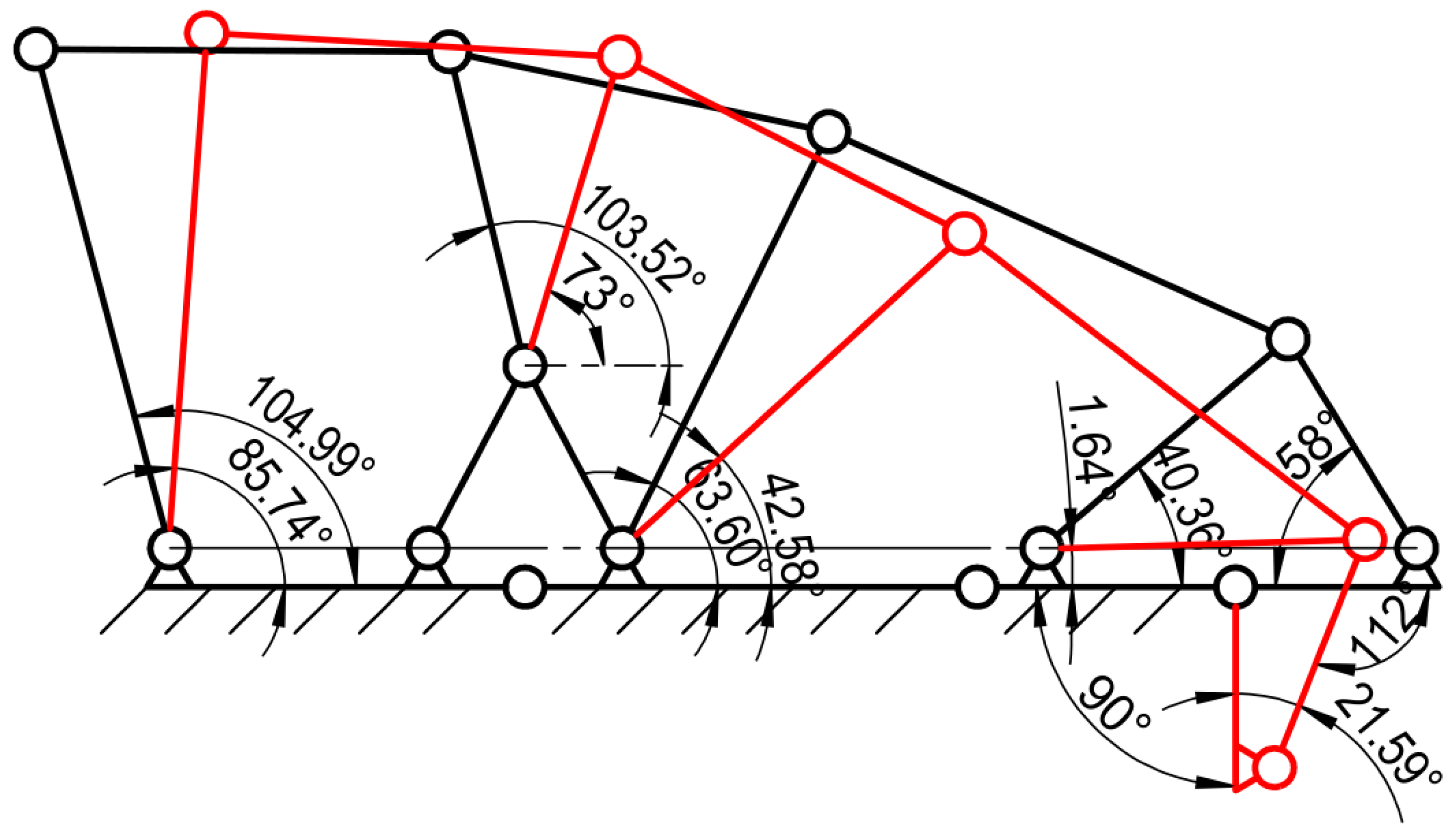
4.1. Kinematic Model
- (1)
- Friction factors are negligible.
- (2)
- The relative displacement between the human hand and neurorehabilitation robotic glove can be ignored.
- (3)
- The voluntary movements of the IP joint of the thumb and DIP joints of the remaining four fingers are negligible.
- (4)
- The movements of the four fingers and thumb are synchronized.
4.2. Analysis of the Degrees of Freedom
4.3. Kinematic Analysis
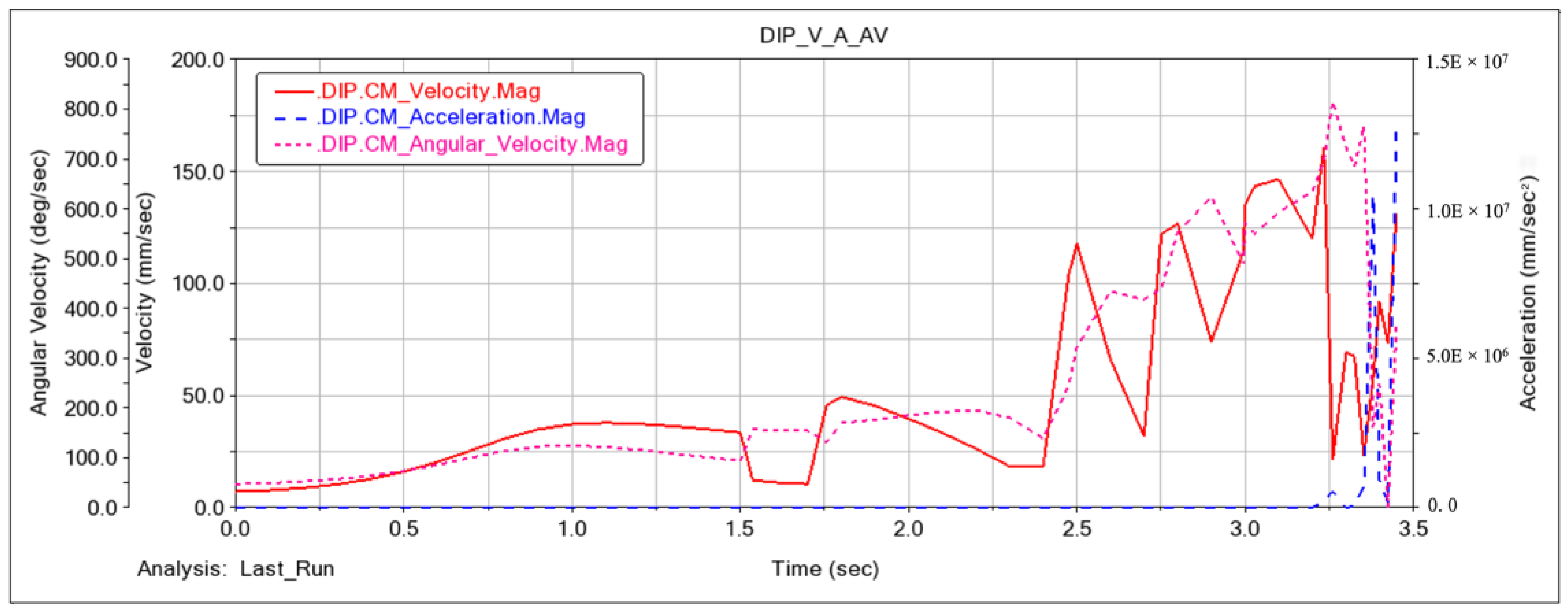
4.4. Kinetic Analysis
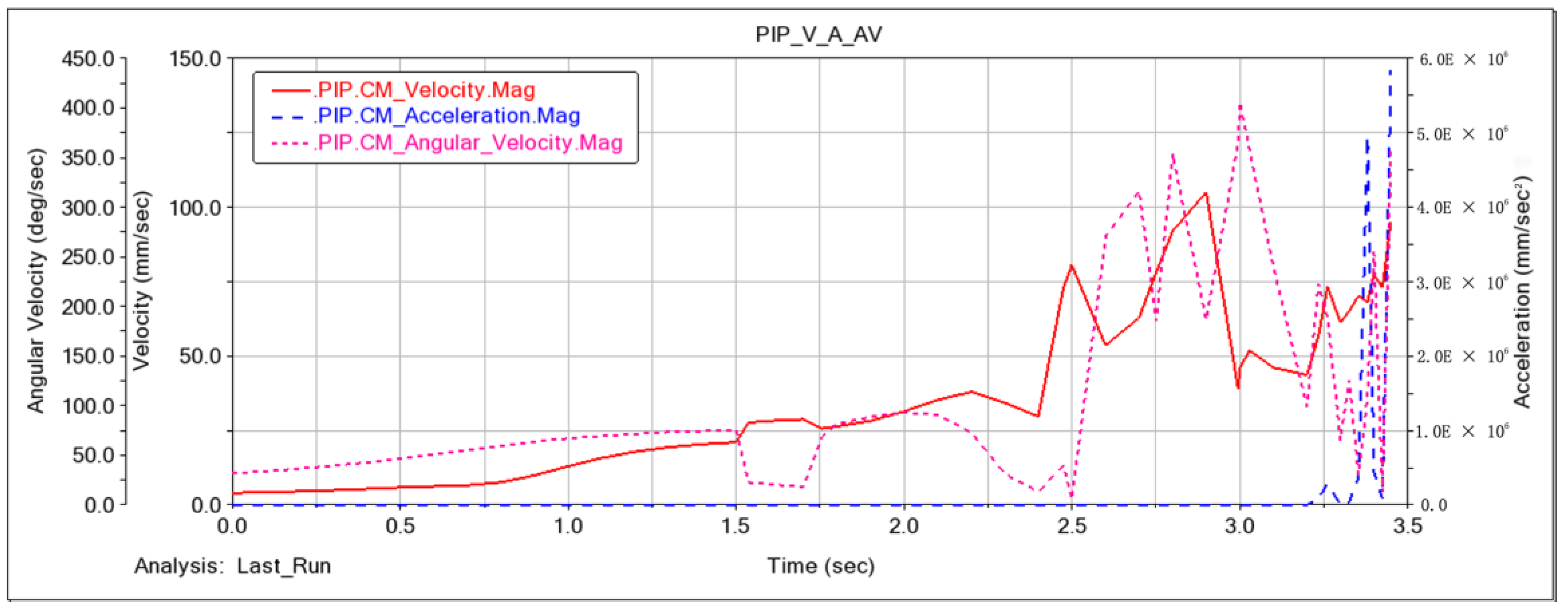
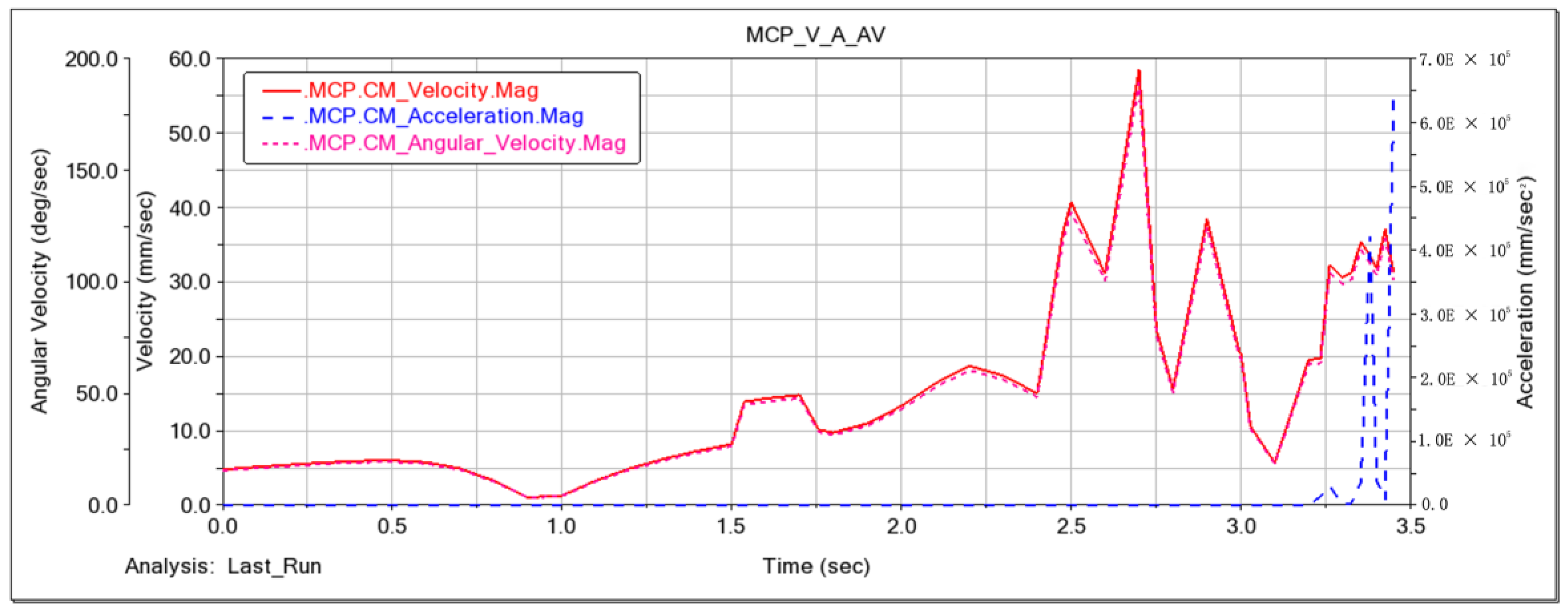
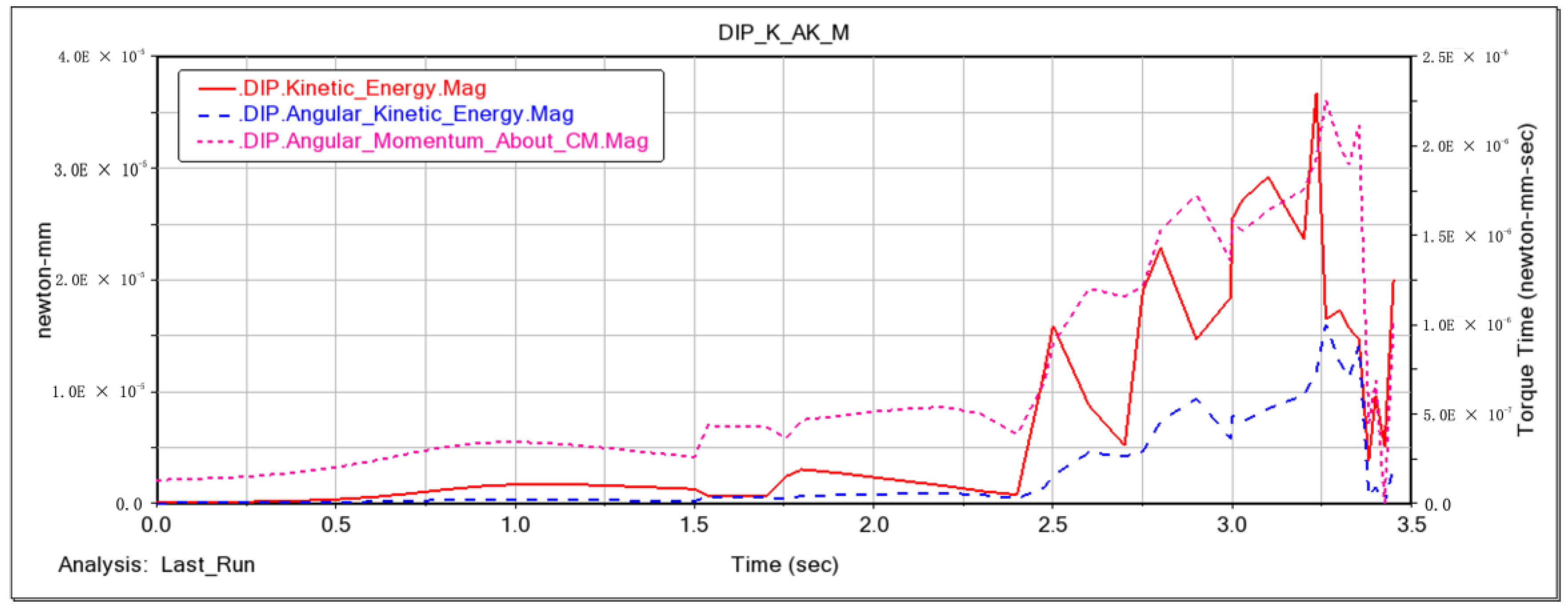
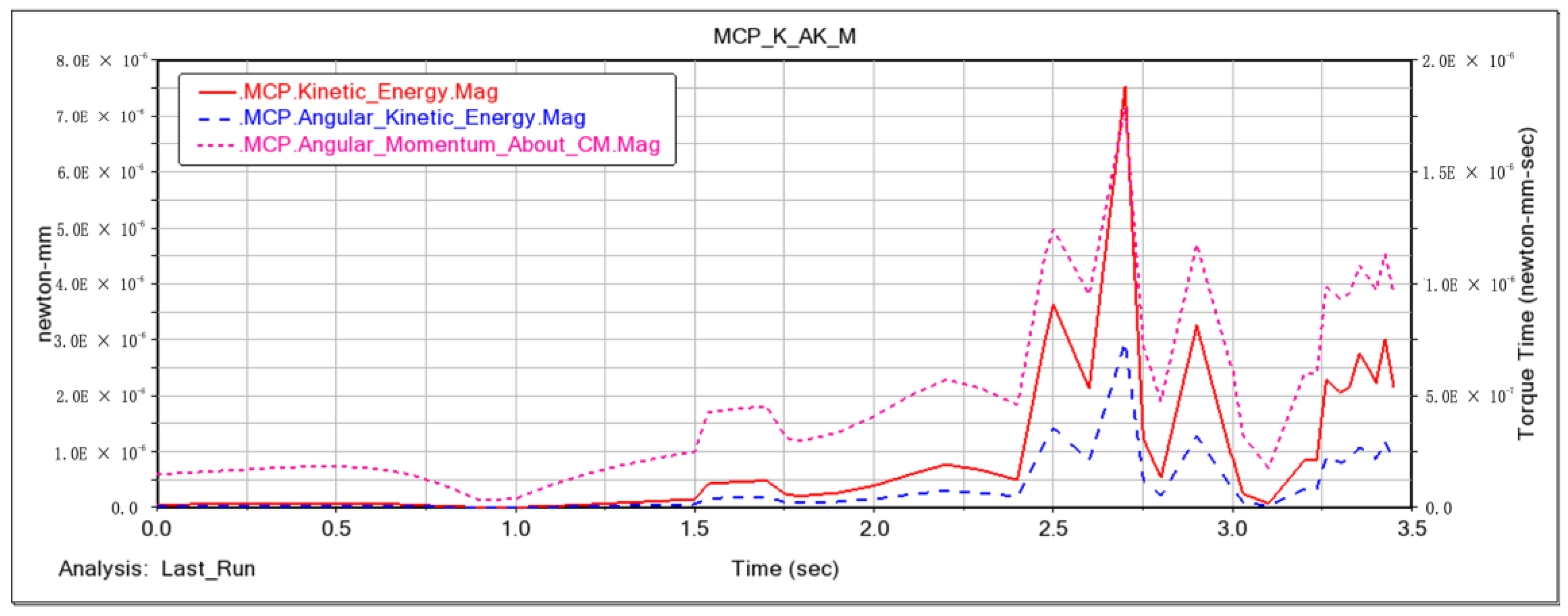
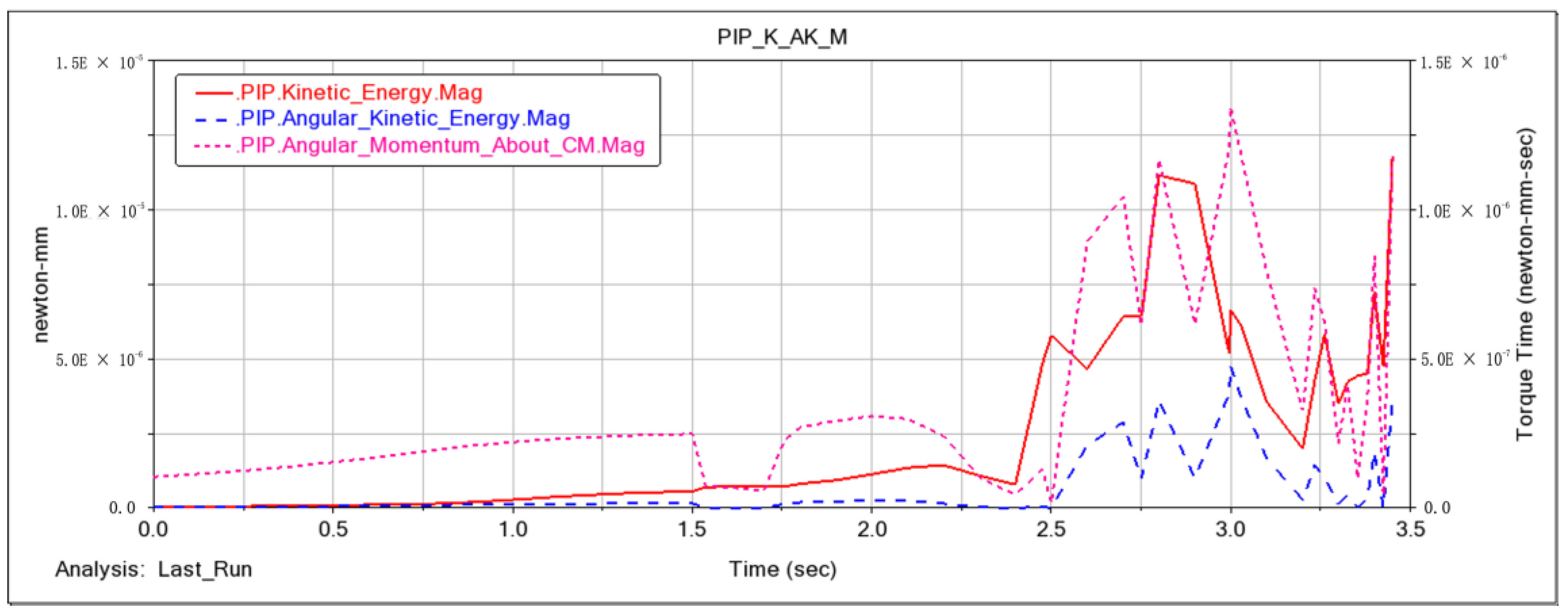
5. Discussion
6. Conclusions
- (1)
- The research focus of this project tends to analyze, summarize, and generalize the design procedures and methods of structure–function mapping, aiming to enhance and improve primarily in the field of human–machine integration. However, there is limited coverage of the control system for neurorehabilitation robotic gloves and the design methods for human–machine interaction.
- (2)
- To establish a systematic modular design method based on RFWBS for neurorehabilitation therapy devices, this paper takes a rehabilitation robotic glove as an example to verify the established design and modeling methods. However, it is necessary to apply this method to other mechanical systems continuously, aiming to refine and enrich the modular design method of RFWBS.
- (3)
- Through simulation analysis, it is found that the hand exoskeleton structure needs to be worn to restrict the workspace, enabling the exoskeleton structure to have good kinematic and dynamic performance. However, when the exoskeleton structure moves independently, due to under-actuation, there are significant angular velocity fluctuations when joint movements exceed the natural range of motion, affecting the overall performance of the mechanism. In future work, we will build a prototype of the structure, conduct performance testing, optimize the structure based on experimental data, and then complete the work related to the verification and comparison of the issues mentioned above. In future designs, we will focus on applying the RFWBS model to the physical prototype to enhance the human–machine interaction, comfort, and safety of the prototype.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CPM | Continuous passive motion |
| FBS | Function–behavior–structure |
| MCP | Metacarpophalangeal |
| IP | Interphalangeal |
| DIP | Distal interphalangeal |
References
- Aisen, M.L.; Kerkovich, D.; Mast, J.; Mulroy, S.; AL Wren, T.; Kay, R.M.; Rethlefsen, S.A. Cerebral palsy: Clinical care and neurological rehabilitation. Lancet Neurol. 2011, 10, 844–852. [Google Scholar] [CrossRef]
- Young, J.A.; Tolentino, M. Neuroplasticity and Its Applications for Rehabilitation. Am. J. Ther. 2011, 18, 70–80. [Google Scholar] [CrossRef] [PubMed]
- Xing, Y.; Bai, Y. A Review of Exercise-Induced Neuroplasticity in Ischemic Stroke: Pathology and Mechanisms. Mol. Neurobiol. 2020, 57, 4218–4231. [Google Scholar] [CrossRef] [PubMed]
- Rossini, P.M.; Calautti, C.; Pauri, F.; Baron, J.-C. Post-stroke plastic reorganisation in the adult brain. Lancet Neurol. 2003, 2, 493–502. [Google Scholar] [CrossRef] [PubMed]
- Lynch, D.; Ferraro, M.; Krol, J.; Trudell, C.M.; Christos, P.; Volpe, B.T. Continuous passive motion improves shoulder joint integrity following stroke. Clin. Rehabil. 2005, 19, 594–599. [Google Scholar] [CrossRef] [PubMed]
- Stefanova, I. Effects of using continuous passive motion device in the rehabilitation upper limb following stroke. In Proceedings of the EIIC—2nd Electronic International Interdisciplinary Conference, Zilina, Slovakia, 8–12 August 2016; pp. 240–242. [Google Scholar] [CrossRef]
- Volpe, B.T.; Ferraro, M.; Lynch, D.; Christos, P.; Krol, J.; Trudell, C.; Krebs, H.I.; Hogan, N. Robotics and other devices in the treatment of patients recovering from stroke. Curr. Atheroscler. Rep. 2004, 6, 314–319. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Q.-X.; Ge, L.; Wang, C.C.; Ma, Q.-S.; Liao, Y.-T.; Huang, P.-P.; Wang, G.-D.; Xie, Q.-L.; Rask, M. Robot-assisted therapy for balance function rehabilitation after stroke: A systematic review and meta-analysis. Int. J. Nurs. Stud. 2019, 95, 7–18. [Google Scholar] [CrossRef]
- Singh, N.; Saini, M.; Kumar, N.; Srivastava, M.V.P.; Mehndiratta, A. Evidence of neuroplasticity with robotic hand exoskeleton for post-stroke rehabilitation: A randomized controlled trial. J. Neuroeng. Rehabil. 2021, 18, 76. [Google Scholar] [CrossRef]
- Tefertiller, C.; Pharo, B.; Evans, N.; Winchester, P. Efficacy of rehabilitation robotics for walking training in neurological disorders: A review. J. Rehabil. Res. Dev. 2011, 48, 387–416. [Google Scholar] [CrossRef]
- Lamé, G.; Yannou, B.; Cluzel, F. Usage-driven problem design for radical innovation in healthcare. BMJ Innov. 2018, 4, 15–23. [Google Scholar] [CrossRef]
- Chandrasegaran, S.K.; Ramani, K.; Sriram, R.D.; Horváth, I.; Bernard, A.; Harik, R.F.; Gao, W. The evolution, challenges, and future of knowledge representation in product design systems. Comput. Des. 2013, 45, 204–228. [Google Scholar] [CrossRef]
- Tang, D.; Zhu, R.; Tang, J.; Xu, R.; He, R. Product design knowledge management based on design structure matrix. Adv. Eng. Inform. 2010, 24, 159–166. [Google Scholar] [CrossRef]
- Galle, P. The ontology of Gero’s FBS model of designing. Des. Stud. 2009, 30, 321–339. [Google Scholar] [CrossRef]
- Vermaas, P.E.; Dorst, K. On the conceptual framework of John Gero’s FBS-model and the prescriptive aims of design methodology. Des. Stud. 2007, 28, 133–157. [Google Scholar] [CrossRef]
- Cascini, G.; Fantoni, G.; Montagna, F. Situating needs and requirements in the FBS framework. Des. Stud. 2013, 34, 636–662. [Google Scholar] [CrossRef]
- Gero, J.S.; Kannengiesser, U. The situated function–behaviour–structure framework. Des. Stud. 2004, 25, 373–391. [Google Scholar] [CrossRef]
- Christophe, F.; Bernard, A.; Coatanéa, E. RFBS: A model for knowledge representation of conceptual design. CIRP Ann. 2010, 59, 155–158. [Google Scholar] [CrossRef]
- Gu, C.-C.; Hu, J.; Peng, Y.-H.; Li, S. FCBS model for functional knowledge representation in conceptual design. J. Eng. Des. 2012, 23, 577–596. [Google Scholar] [CrossRef]
- Li, S. A matrix-based clustering approach for the decomposition of design problems. Res. Eng. Des. 2011, 22, 263–278. [Google Scholar] [CrossRef]
- Fan, B.; Qi, G.; Hu, X.; Yu, T. A network methodology for structure-oriented modular product platform planning. J. Intell. Manuf. 2015, 26, 553–570. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, M.; Xie, Y.; Zhang, Z. A new model of conceptual design based on Scientific Ontology and intentionality theory. Part II: The process model. Des. Stud. 2015, 38, 139–160. [Google Scholar] [CrossRef]
- Yannou, B.; Cluzel, F.; Lamé, G. Draft: Adapting the FBS model of designing for usage-driven innovation processes. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2018; p. 10. [Google Scholar]
- Qin, H.; Wang, H.; Johnson, A.L. A RFBSE model for capturing engineers’ useful knowledge and experience during the design process. Robot. Comput. Manuf. 2017, 44, 30–43. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, P.; Lee, C.-H.; Chen, C.-H. Knowledge Representation and Reasoning Methods in the Concept Develop-ment of Product Design: A State-of-the-Art Review. In Transdisciplinary Engineering Methods for Social Innovation of Industry; IOS Press: Amsterdam, The Netherlands, 2018; pp. 478–487. [Google Scholar]
- Yuan, L.; Liu, Y.; Sun, Z.; Cao, Y.; Qamar, A. A hybrid approach for the automation of functional decomposition in conceptual design. J. Eng. Des. 2016, 27, 333–360. [Google Scholar] [CrossRef]
- Umeda, Y.; Tomiyama, T. FBS Modeling: Modeling Scheme of Function for Conceptual Design. In Proceedings of the 9th International Workshop on Qualitative Reasoning, Amsterdam, The Netherlands, 16–19 May 1995; p. 8. [Google Scholar]
- Chakrabarti, A.; Bligh, T.P. A scheme for functional reasoning in conceptual design. Des. Stud. 2001, 22, 493–517. [Google Scholar] [CrossRef]
- Chen, B.; Xie, Y. Functional knowledge integration of the design process. Sci. China Technol. Sci. 2017, 60, 209–218. [Google Scholar] [CrossRef]
- Wu, C.; Chen, T.; Li, Z.; Liu, W. A function-oriented optimising approach for smart product service systems at the conceptual design stage: A perspective from the digital twin framework. J. Clean. Prod. 2021, 297, 126597. [Google Scholar] [CrossRef]
- Price, C.J.; Friston, K.J. Functional ontologies for cognition: The systematic definition of structure and function. Cogn. Neuropsychol. 2005, 22, 262–275. [Google Scholar] [CrossRef]
- Wynn, D.; Clarkson, J. Models of designing. In Design Process Improvement; Clarkson, J., Eckert, C., Eds.; Springer: London, UK, 2005; pp. 34–59. [Google Scholar] [CrossRef]
- Gui, J.-K.; Mäntylä, M. Functional understanding of assembly modelling. Comput. Des. 1994, 26, 435–451. [Google Scholar] [CrossRef]
- Nomaguchi, Y.; Fujita, K. Knowledge representation framework for interactive capture and management of reflection process in product concepts development. Adv. Eng. Inform. 2013, 27, 537–554. [Google Scholar] [CrossRef]
- Wang, Z.; Cui, L.; Guo, W.; Zhao, L.; Yuan, X.; Gu, X.; Tang, W.; Bu, L.; Huang, W. A design method for an intelligent manufacturing and service system for rehabilitation assistive devices and special groups. Adv. Eng. Inform. 2022, 51, 101504. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension of User Requirements | Numbers | User Requirements |
|---|---|---|
| Basic Requirements | R1 | Safety and Stability |
| R2 | Neurorehabilitation | |
| R3 | Precise Human–Machine Interaction | |
| R4 | Comfortable Use | |
| Auxiliary Requirements | R5 | Ease of Wear |
| R6 | Assisted Rehabilitation | |
| R7 | Aesthetic Design | |
| R8 | Personalized Requirements |
| Number of Iterations | q | |||
|---|---|---|---|---|
| 0 (0°) | 1 | 1.7710 (101.47°) | 0.0552 | −0.0412 |
| 2 | 1.8104 (103.73°) | 0.0031 | −0.0003 | |
| 3 | 1.8324 (104.99°) | 3 × 10−8 | −2 × 10−7 | |
| 1.5708 (90°) | 1 | 1.4375 (82.36°) | −0.0376 | −0.0125 |
| 2 | 1.4694 (84.19°) | 0.0002 | −0.0001 | |
| 3 | 1.4964 (85.74°) | −1 × 10−8 | −1 × 10−7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Jiang, N.; Lee, K.Y.; Yu, J.; Han, X. RFWBS Model: Multilevel Hybrid Mapping Solution Framework for Designing Neurorehabilitation Physiotherapy Devices. Machines 2024, 12, 43. https://doi.org/10.3390/machines12010043
Zhang P, Jiang N, Lee KY, Yu J, Han X. RFWBS Model: Multilevel Hybrid Mapping Solution Framework for Designing Neurorehabilitation Physiotherapy Devices. Machines. 2024; 12(1):43. https://doi.org/10.3390/machines12010043
Chicago/Turabian StyleZhang, Peng, Nan Jiang, Kyoung Yong Lee, Jinxu Yu, and Xin Han. 2024. "RFWBS Model: Multilevel Hybrid Mapping Solution Framework for Designing Neurorehabilitation Physiotherapy Devices" Machines 12, no. 1: 43. https://doi.org/10.3390/machines12010043
APA StyleZhang, P., Jiang, N., Lee, K. Y., Yu, J., & Han, X. (2024). RFWBS Model: Multilevel Hybrid Mapping Solution Framework for Designing Neurorehabilitation Physiotherapy Devices. Machines, 12(1), 43. https://doi.org/10.3390/machines12010043