
Modified Super-Twisting Algorithm-Based Model Reference Adaptive Observer for Sensorless Control of the Interior Permanent-Magnet Synchronous Motor in Electric Vehicles

Abstract
:1. Introduction
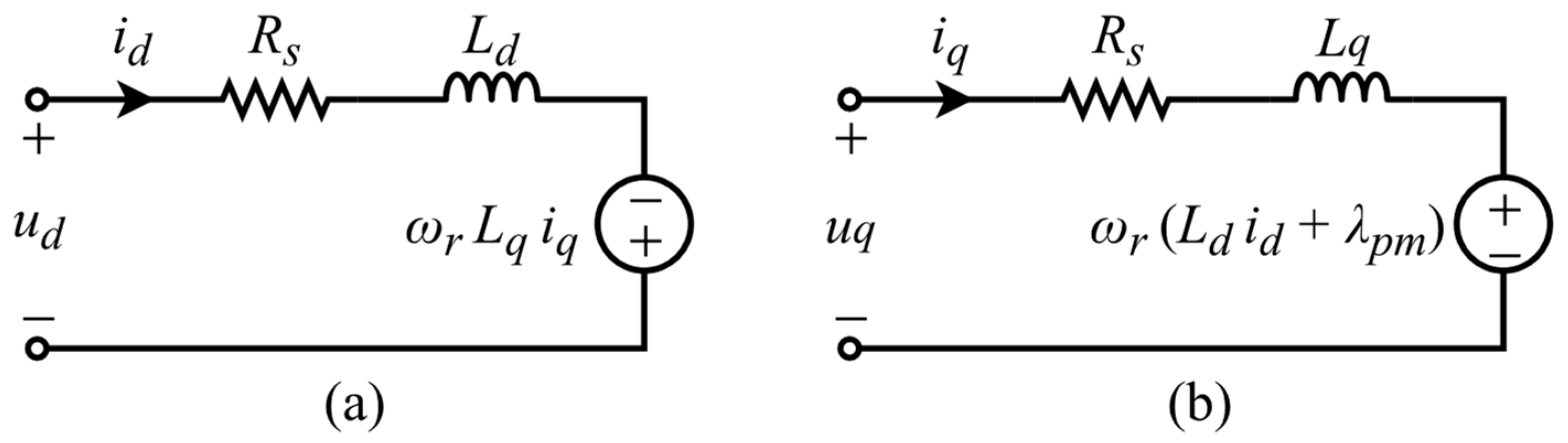
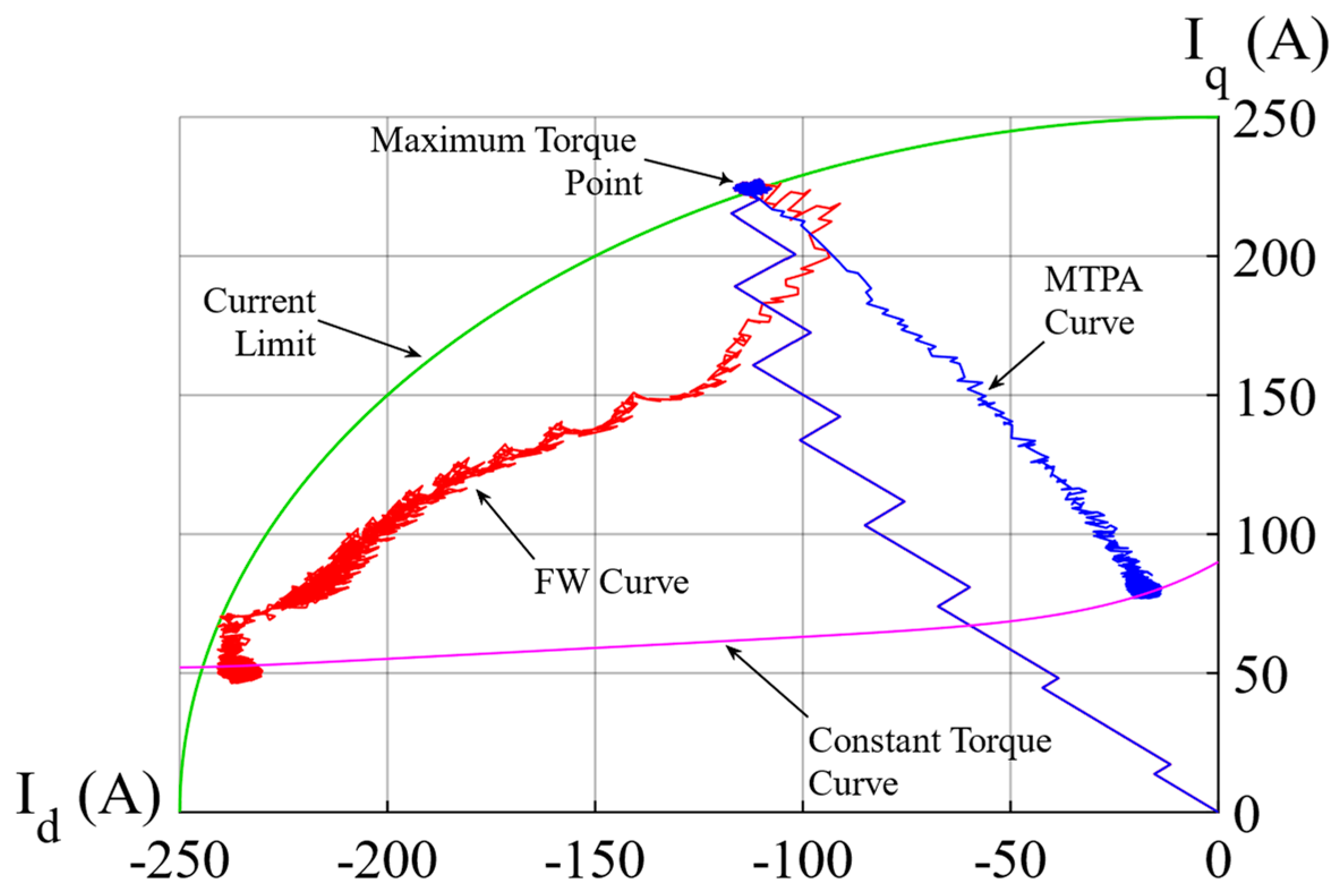
2. Mathematical Model of the IPMSM and MTPA Control Algorithm
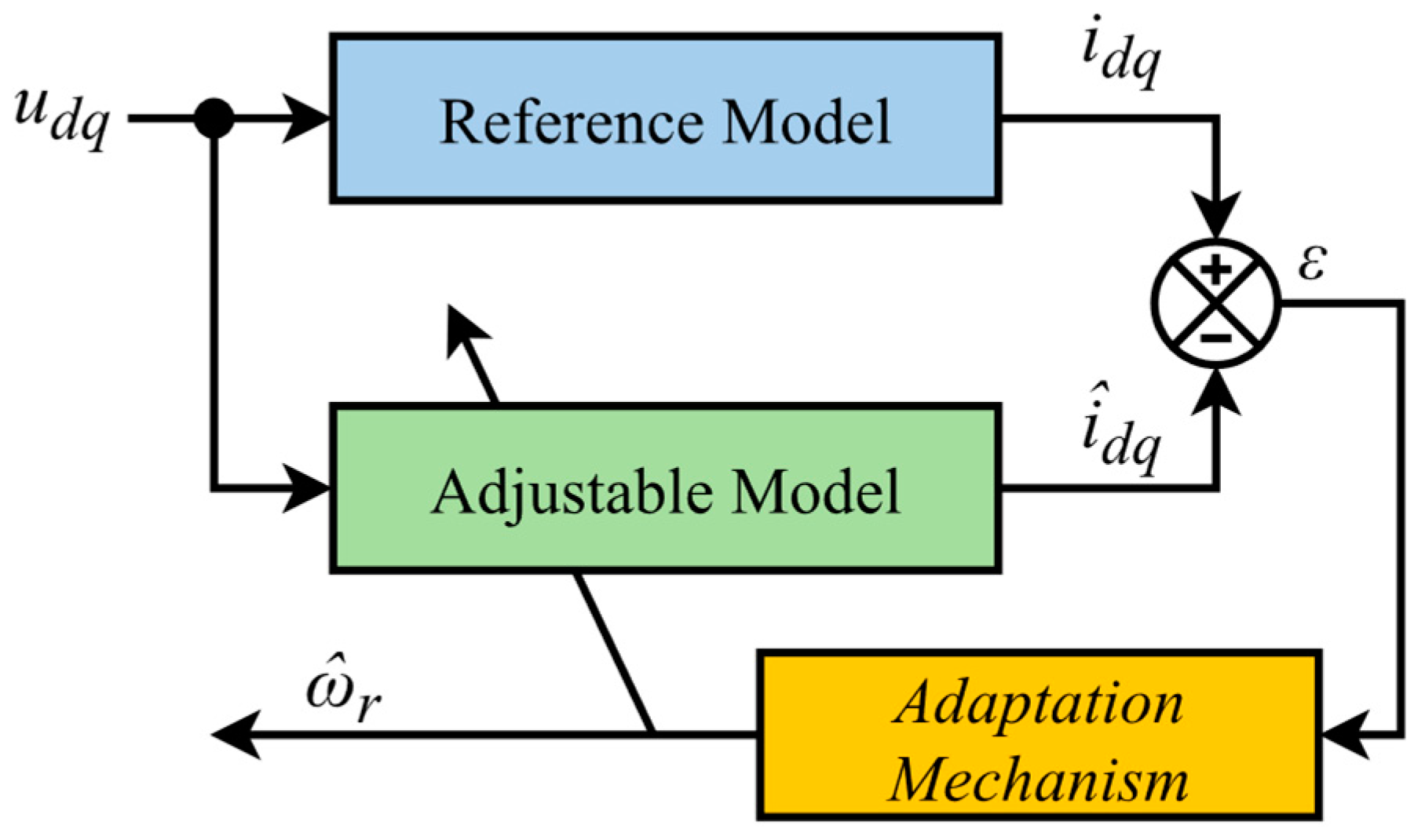
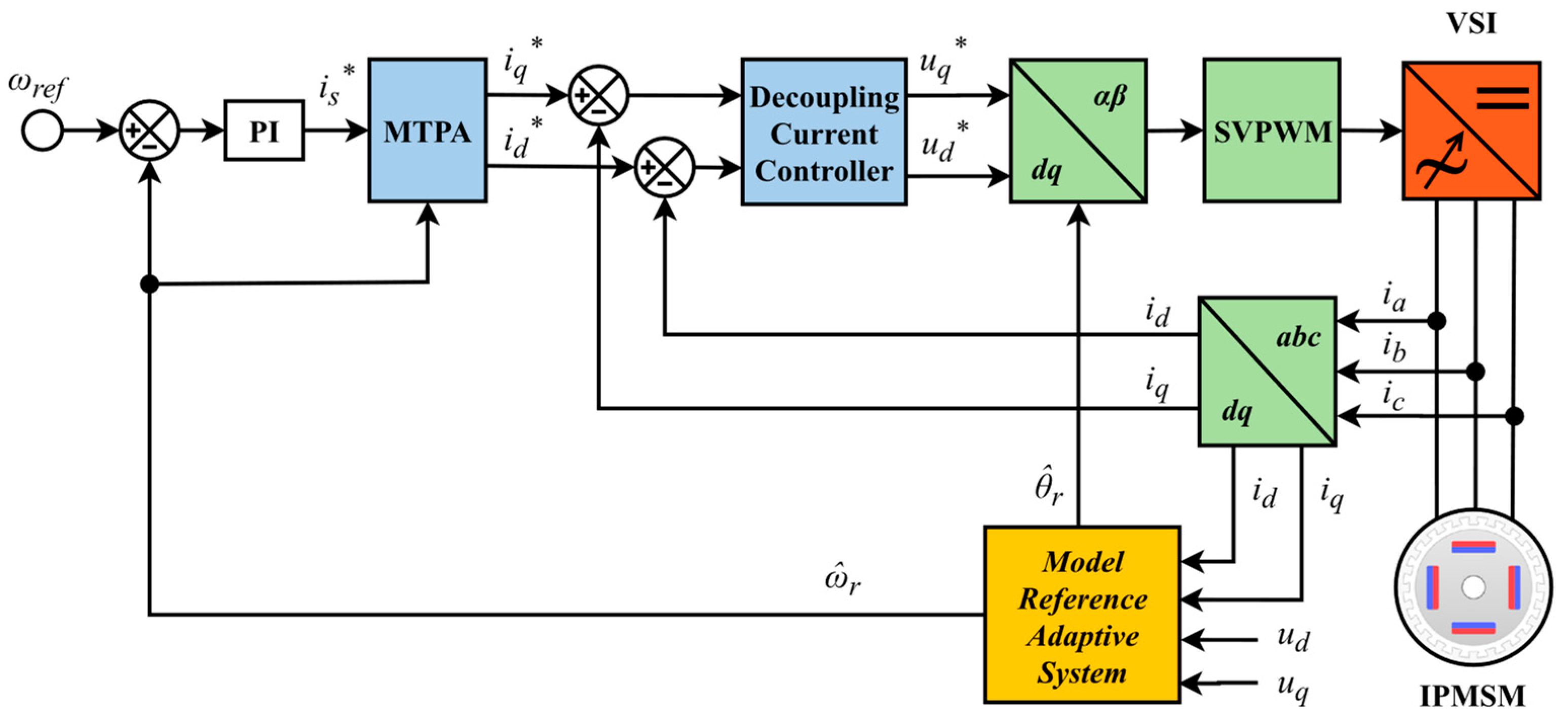
3. Structure of MRAS Observer
4. Sliding Mode-Based MRAS Observer
4.1. The Super-Twisting Algorithm
4.2. Fast Terminal Sliding Mode
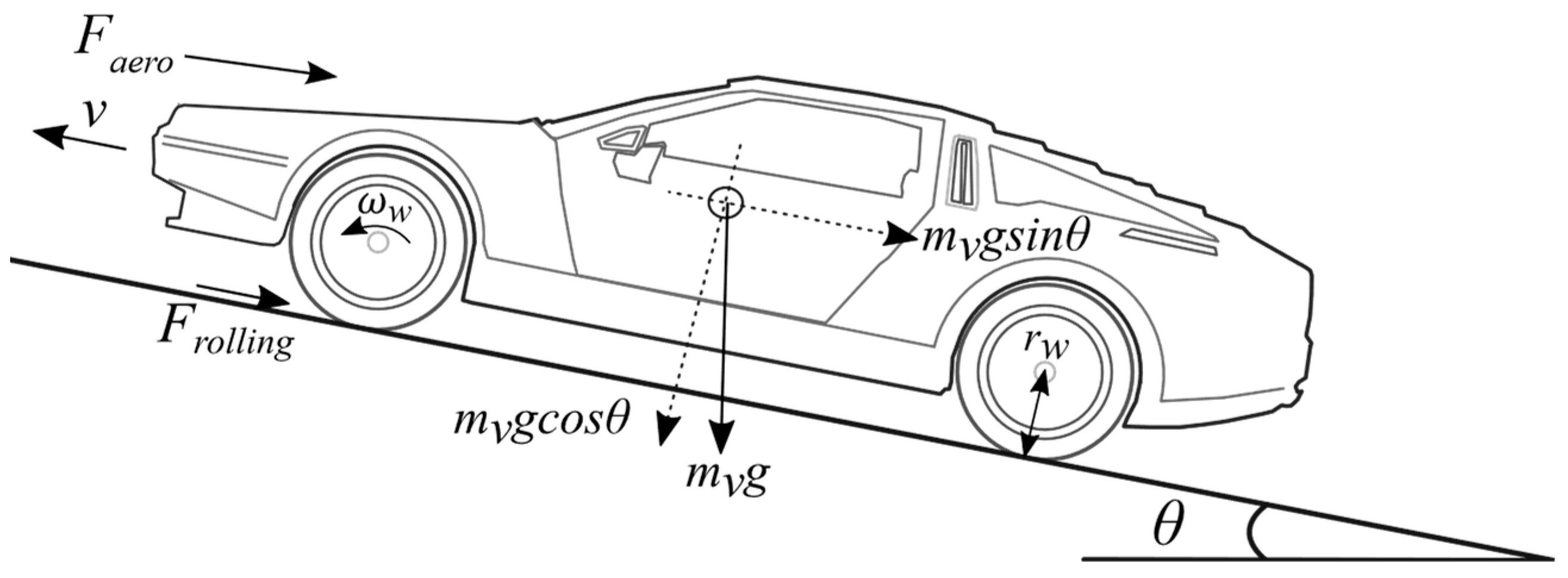
5. Electric Vehicle Model
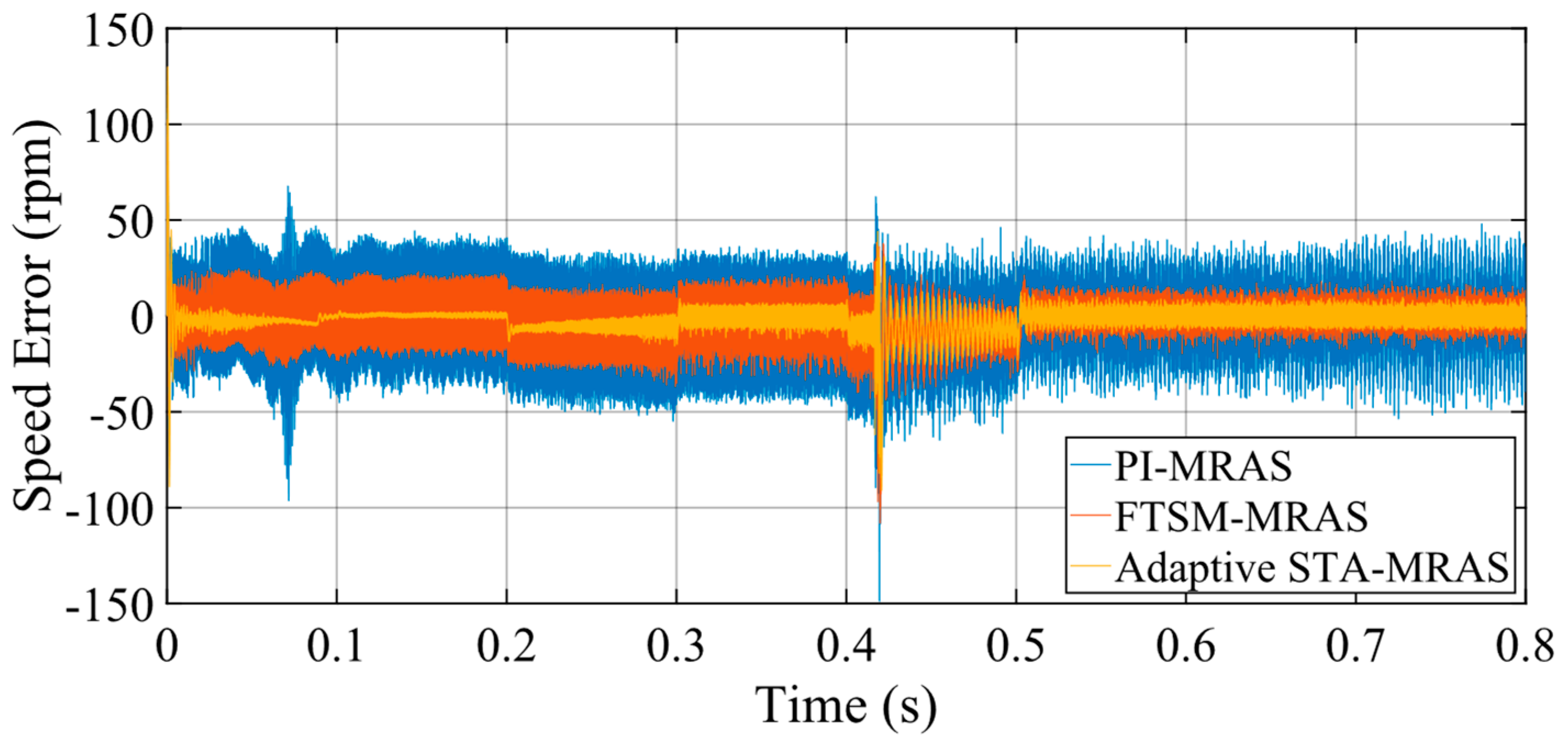
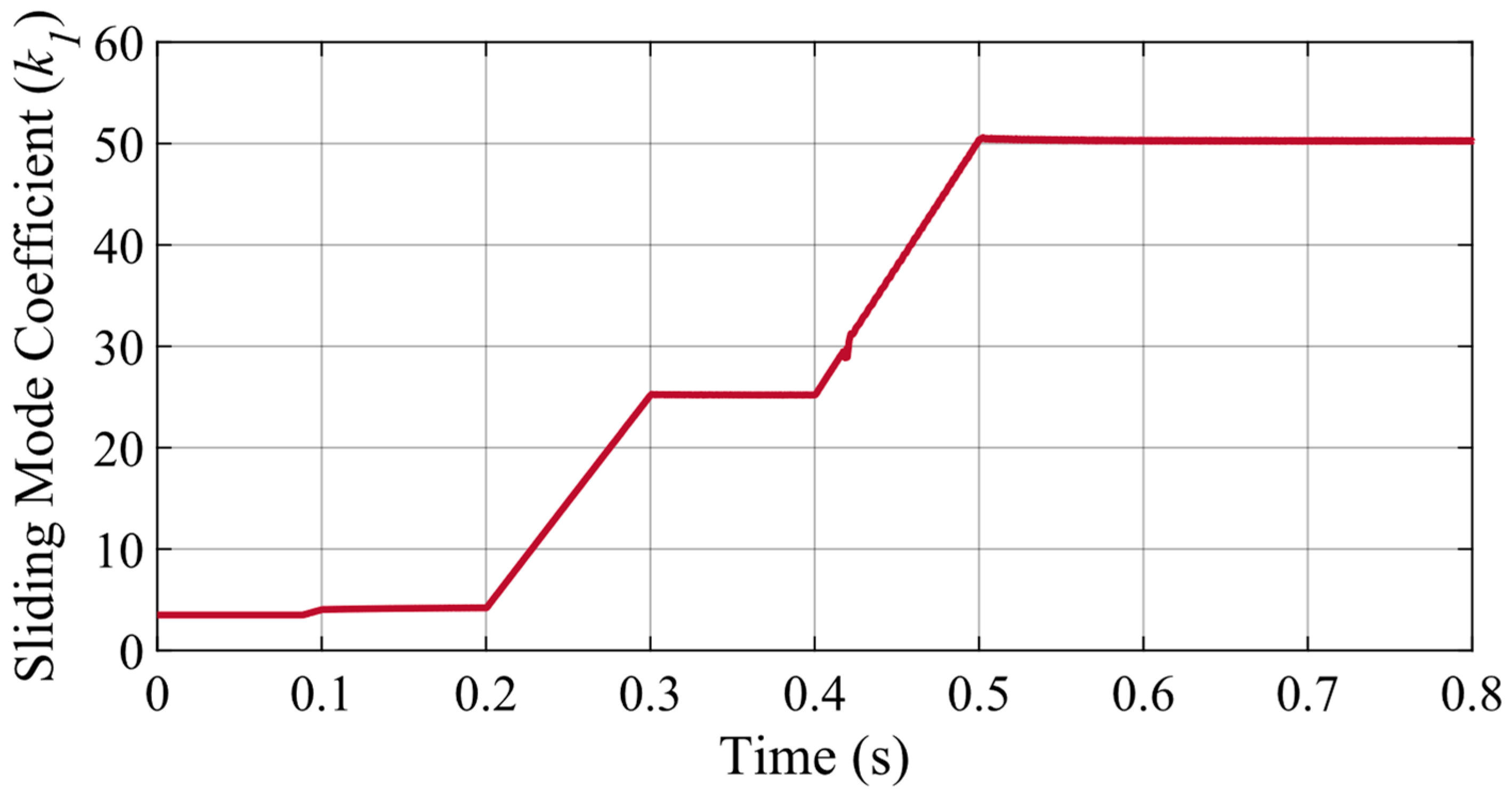
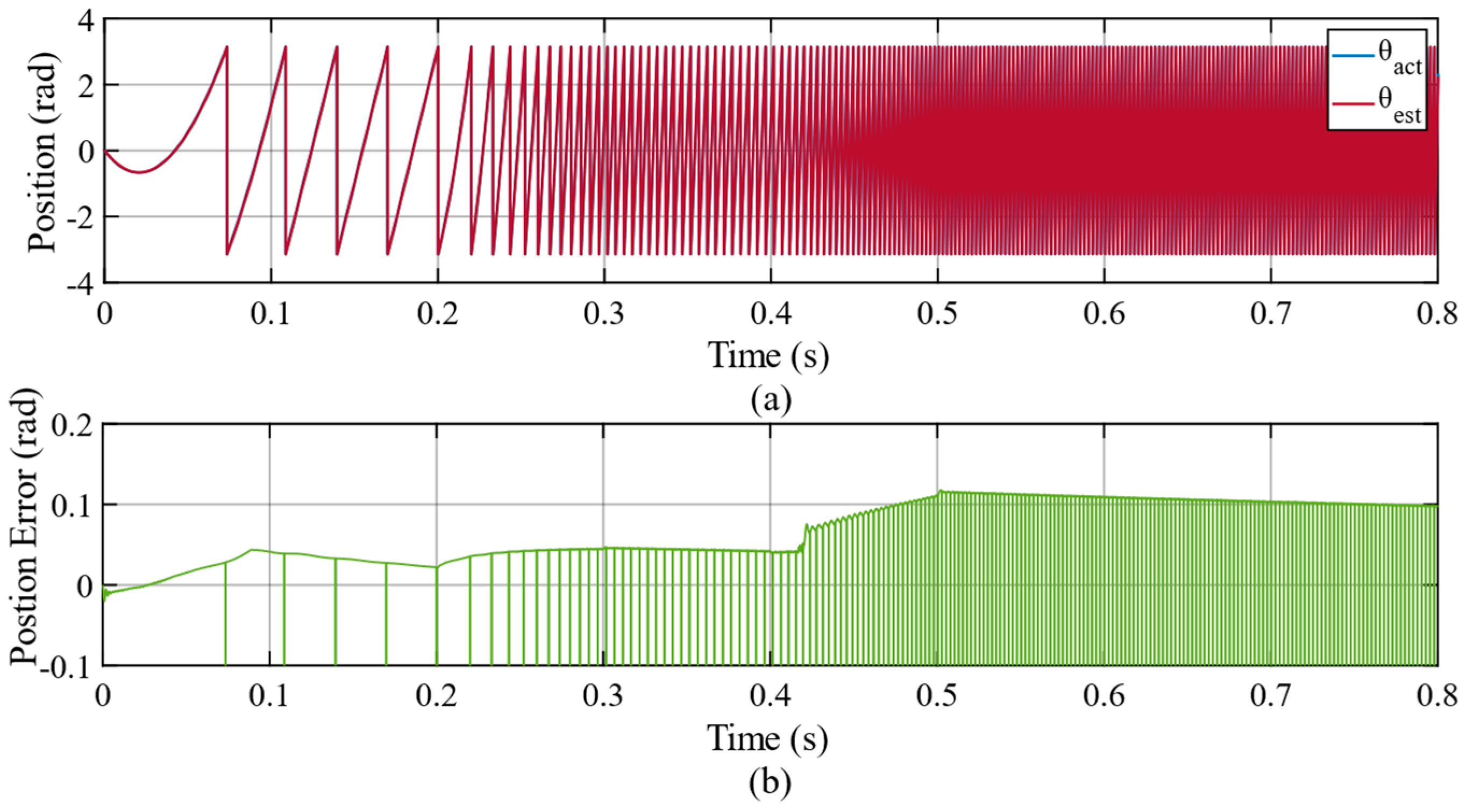
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Gong, C.; Han, Z.; Yu, H. IPMSM Model Predictive Control in Flux-Weakening Operation Using an Improved Algorithm. IEEE Trans. Ind. Electron. 2018, 65, 9378–9387. [Google Scholar] [CrossRef]
- Guo, L.; Parsa, L. Model Reference Adaptive Control of Five-Phase IPM Motors Based on Neural Network. IEEE Trans. Ind. Electron. 2012, 59, 1500–1508. [Google Scholar] [CrossRef]
- Bıçak, A.; Gelen, A. Sensorless Direct Torque Control Based on Seven-Level Torque Hysteresis Controller for Five-Phase IPMSM Using a Sliding-Mode Observer. Eng. Sci. Technol. Int. J. 2021, 24, 1134–1143. [Google Scholar] [CrossRef]
- Lin, F.J.; Liao, Y.H.; Lin, J.R.; Lin, W.T. Interior Permanent Magnet Synchronous Motor Drive System with Machine Learning-Based Maximum Torque per Ampere and Flux-Weakening Control. Energies 2021, 14, 346. [Google Scholar] [CrossRef]
- Foo, G.; Rahman, M.F. Sensorless Vector Control of Interior Permanent Magnet Synchronous Motor Drives at Very Low Speed without Signal Injection. IET Electr. Power Appl. 2010, 4, 131–139. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Kim, E.K.; Kim, J.; Choi, H.H.; Jung, J.W. Fuzzy Model Predictive Direct Torque Control of IPMSMs for Electric Vehicle Applications. IEEE/ASME Trans. Mechatron. 2017, 22, 1542–1553. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R. Sensorless Control of Permanent Magnet Synchronous Machine Based on Second-Order Sliding-Mode Observer With Online Resistance Estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, J.; Chai, B. Adaptive Super-Twisting Sliding Mode Observer Based Robust Backstepping Sensorless Speed Control for IPMSM. ISA Trans. 2019, 92, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Abo-Khalil, A.G.; Eltamaly, A.M.; Alsaud, M.S.; Sayed, K.; Alghamdi, A.S. Sensorless Control for PMSM Using Model Reference Adaptive System. Int. Trans. Electr. Energy Syst. 2021, 31, e12733. [Google Scholar] [CrossRef]
- Chen, J.; Chen, S.; Wu, X.; Tan, G.; Hao, J. A Super-Twisting Sliding-Mode Stator Flux Observer for Sensorless Direct Torque and Flux Control of IPMSM. Energies 2019, 12, 2564. [Google Scholar] [CrossRef]
- Li, L.; Zhou, W.; Bi, X.; Shi, X. Speed Estimation of PMSM Based on a Super-Twisting Slide Mode Observer. Machines 2022, 10, 681. [Google Scholar] [CrossRef]
- Cao, R.; Jiang, N.; Lu, M. Sensorless Control of Linear Flux-Switching Permanent Magnet Motor Based on Extended Kalman Filter. IEEE Trans. Ind. Electron. 2020, 67, 5971–5979. [Google Scholar] [CrossRef]
- Khlaief, A.; Boussak, M.; Châari, A. A MRAS-Based Stator Resistance and Speed Estimation for Sensorless Vector Controlled IPMSM Drive. Electr. Power Syst. Res. 2014, 108, 1–15. [Google Scholar] [CrossRef]
- Badini, S.S.; Verma, V. Parameter Independent Speed Estimation Technique for PMSM Drive in Electric Vehicle. Int. Trans. Electr. Energy Syst. 2021, 31, e13071. [Google Scholar] [CrossRef]
- Verma, V.; Chakraborty, C. New Series of MRAS for Speed Estimation of Vector Controlled Induction Motor Drive. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Dallas, TX, USA, 29 October–1 November 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014; pp. 755–761. [Google Scholar]
- Ravi Teja, A.V.; Verma, V.; Chakraborty, C. A New Formulation of Reactive-Power-Based Model Reference Adaptive System for Sensorless Induction Motor Drive. IEEE Trans. Ind. Electron. 2015, 62, 6797–6808. [Google Scholar] [CrossRef]
- He, Y.; Wang, J.; Wang, Z.; Wang, H.; Wang, Q.; Wei, D.; Zeng, Z. Speed Observation of High-Speed Permanent Magnet Synchronous Motor Based on Fuzzy MRAS. In Proceedings of the 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; pp. 3550–3555. [Google Scholar]
- Jain, M.; Singh, M.; Chandra, A.; Williamson, S.S. Sensorless Control of Permanent Magnet Synchronous Motor Using ANFIS Based MRAS. In Proceedings of the 2011 IEEE International Electric Machines and Drives Conference, IEMDC, Niagara Falls, ON, Canada, 15–18 May 2011; pp. 599–606. [Google Scholar]
- Azza, H.B.; Zaidi, N.; Jemli, M.; Boussak, M. Development and Experimental Evaluation of a Sensorless Speed Control of SPIM Using Adaptive Sliding Mode-MRAS Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 319–328. [Google Scholar] [CrossRef]
- Comanescu, M.; Xu, L. Sliding-Mode MRAS Speed Estimators for Sensorless Vector Control of Induction Machine. IEEE Trans. Ind. Electron. 2006, 53, 146–153. [Google Scholar] [CrossRef]
- Gabbi, T.S.; Gründling, H.A.; Vieira, R.P. Sliding Mode MRAS Speed Observer Applied to Permanent Magnet Synchronous Motor with Decoupled Current Control. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Florence, Italy, 23–26 October 2016; IEEE Computer Society: Piscataway, NJ, USA, 2016; pp. 2929–2934. [Google Scholar]
- Kouriche, L.; Messlem, Y. MRAS-Super Twisting Sliding Mode Observer for Speed Sensorless Vector Control of Induction Motor Drive. Prz. Elektrotech. 2021, 97, 121–127. [Google Scholar] [CrossRef]
- Feng, W.; Bai, J.; Zhang, J. Full-Order Adaptive Observer for Interior Permanent-Magnet Synchronous Motor Based on Novel Fast Super-Twisting Algorithm. Meas. Control 2023, 56, 93–113. [Google Scholar] [CrossRef]
- Soufyane, B.; Abdelhamid, R.; Smail, Z. Adaptation Mechanism Techniques for Improving a Model Reference Adaptive Speed Observer in Wind Energy Conversion Systems. Electr. Eng. 2020, 102, 1621–1637. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous Finite-Time Control for Robotic Manipulators with Terminal Sliding Mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Huang, H.; Tu, Q.; Pan, M.; Jiang, C.; Xue, J. Fast Terminal Sliding Mode Control of Permanent Magnet In-Wheel Motor Based on a Fuzzy Controller. Energies 2020, 13, 188. [Google Scholar] [CrossRef]
- Wang, B.; Luo, C.; Yu, Y.; Wang, G.; Xu, D. Antidisturbance Speed Control for Induction Machine Drives Using High-Order Fast Terminal Sliding-Mode Load Torque Observer. IEEE Trans. Power Electron. 2018, 33, 7927–7937. [Google Scholar] [CrossRef]
- Li, L.; Liu, Q. Research on IPMSM Drive System Control Technology for Electric Vehicle Energy Consumption. IEEE Access 2019, 7, 186201–186210. [Google Scholar] [CrossRef]
- Morimoto, S.; Sanada, M.; Takeda, Y. Wide-Speed Operation of Interior Permanent Magnet Synchronous Motors with High-Performance Current Regulator. IEEE Trans. Ind. Appl. 1994, 30, 920–926. [Google Scholar] [CrossRef]
- Wagg, D.J. Adaptive Control of Nonlinear Dynamical Systems Using a Model Reference Approach. Meccanica 2003, 38, 227–238. [Google Scholar] [CrossRef]
- Wang, B.; Shao, Y.; Yu, Y.; Dong, Q.; Yun, Z.; Xu, D. High-Order Terminal Sliding-Mode Observer for Chattering Suppression and Finite-Time Convergence in Sensorless SPMSM Drives. IEEE Trans. Power Electron. 2021, 36, 11910–11920. [Google Scholar] [CrossRef]
- Levant, A. Sliding Order and Sliding Accuracy in Sliding Mode Control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov Approach to Second-Order Sliding Mode Controllers and Observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Nam, K.H. AC Motor Control and Electric Vehicle Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Jung, S.Y.; Hong, J.; Nam, K. Current Minimizing Torque Control of the IPMSM Using Ferrari’s Method. IEEE Trans. Power Electron. 2013, 28, 5603–5617. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive Second-Order Sliding-Mode Observer for PMSM Sensorless Control Considering VSI Nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| P | number of pole pairs | 2 |
| Ld | d-axis inductance | 0.312 mH |
| Lq | q-axis inductance | 0.606 mH |
| Rs | stator resistance | 16.9 mΩ |
| λpm | permanent-magnet flux linkage | 0.099 Wb |
| Is | maximum current | 176.7 A (rms) |
| P | maximum power | 70 kW |
| UDC | DC link voltage | 360 V |
| Symbol | Parameter | Value |
|---|---|---|
| Vehicle total mass | 1313 kg | |
| Vehicle frontal area | 1.746 m2 | |
| Gear ratio | 5 | |
| Air mass density | 1.225 kg/m3 | |
| Transmission efficiency | 0.95 | |
| Radius of the wheels | 0.29 m | |
| Aerodynamic drag coefficient | 0.3 | |
| Rolling resistance coefficient | 0.009 | |
| Gravitational acceleration | 9.8 m/s2 |
| Operating Condition | Torque | Speed Error | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Max. Value | Min. Value | Mean Value | MAPE | ||||||
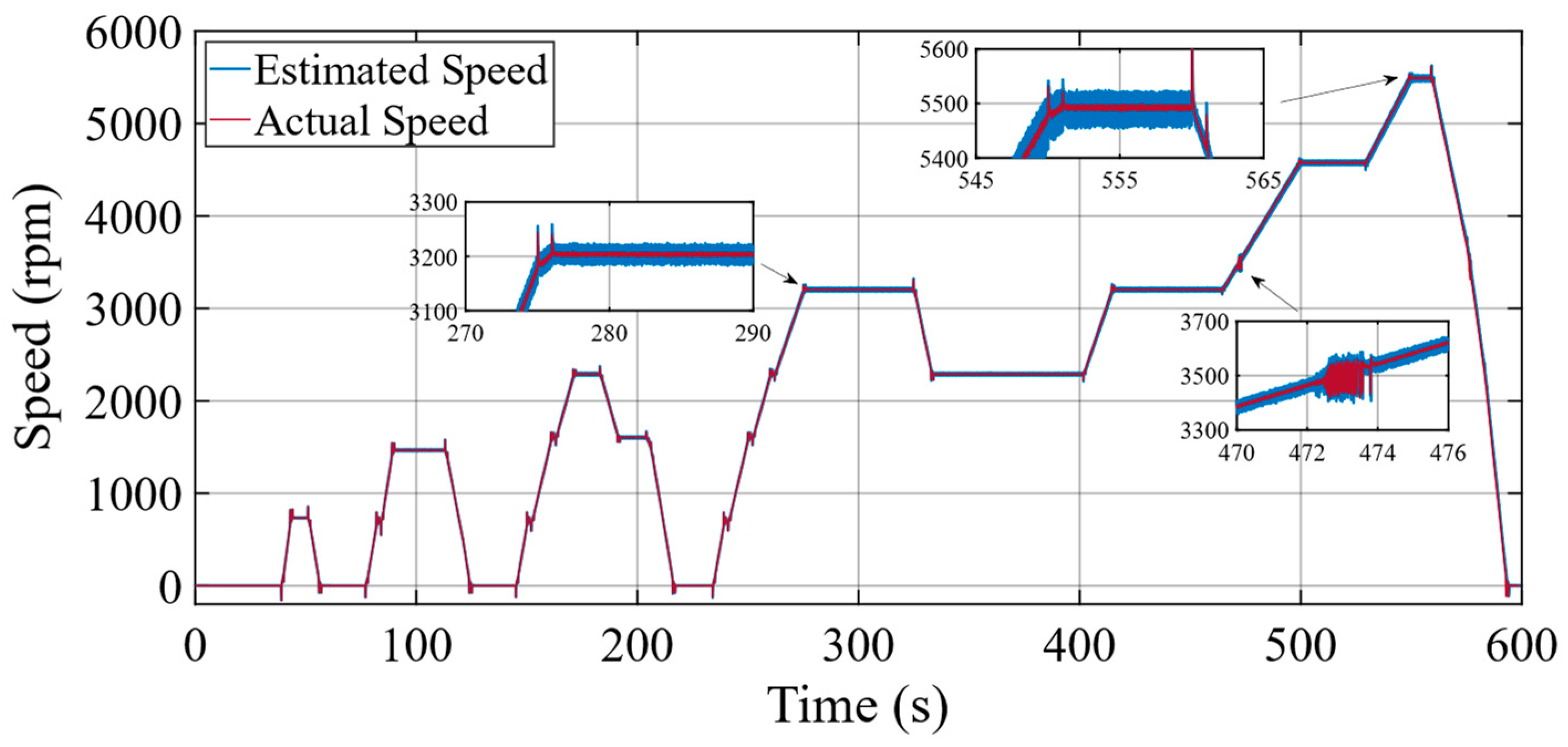
| 3200 rpm, 14.5 Nm (in MTPA) | 18.65 Nm | 11.84 Nm | 15.27 Nm | 6.88% | 35 rpm | −1.29 A | 1.92 A | 25.61 A | 1.56 A |
| 5500 rpm, 28.9 Nm (in FW) | 36.38 Nm | 25.02 Nm | 30.46 Nm | 6.74% | 60 rpm | −211.42 A | 2.47 A | 31.51 A | 1.93 A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bıçak, A.; Gelen, A. Modified Super-Twisting Algorithm-Based Model Reference Adaptive Observer for Sensorless Control of the Interior Permanent-Magnet Synchronous Motor in Electric Vehicles. Machines 2023, 11, 871. https://doi.org/10.3390/machines11090871
Bıçak A, Gelen A. Modified Super-Twisting Algorithm-Based Model Reference Adaptive Observer for Sensorless Control of the Interior Permanent-Magnet Synchronous Motor in Electric Vehicles. Machines. 2023; 11(9):871. https://doi.org/10.3390/machines11090871
Chicago/Turabian StyleBıçak, Aykut, and Ayetül Gelen. 2023. "Modified Super-Twisting Algorithm-Based Model Reference Adaptive Observer for Sensorless Control of the Interior Permanent-Magnet Synchronous Motor in Electric Vehicles" Machines 11, no. 9: 871. https://doi.org/10.3390/machines11090871
APA StyleBıçak, A., & Gelen, A. (2023). Modified Super-Twisting Algorithm-Based Model Reference Adaptive Observer for Sensorless Control of the Interior Permanent-Magnet Synchronous Motor in Electric Vehicles. Machines, 11(9), 871. https://doi.org/10.3390/machines11090871