3. Poles
Poles are linked to the MK theory in the same way the poles were a critical part of Burmester’s original planar synthesis theory [
11,
12,
13]. The pole positions are also shown in
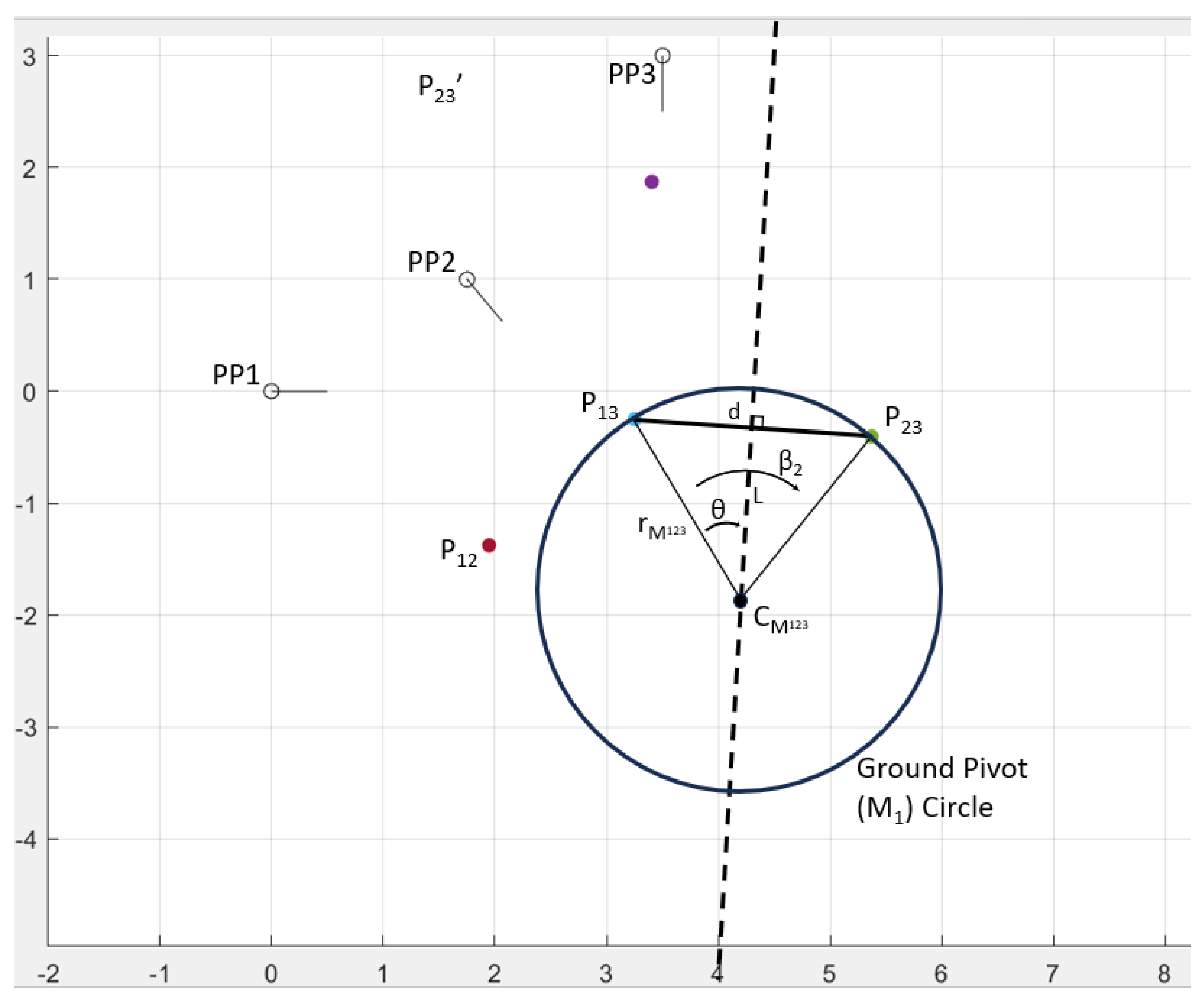
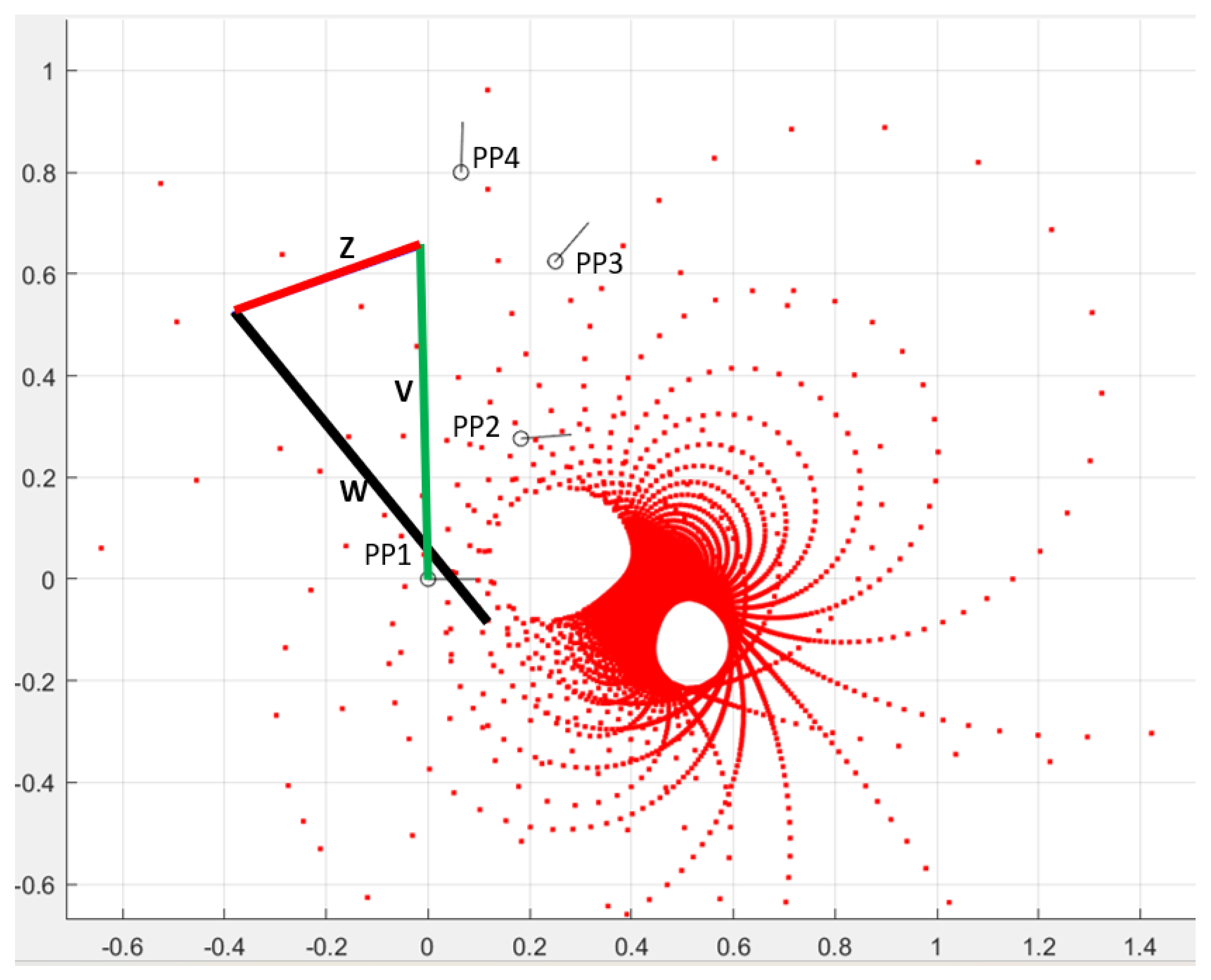
Figure 1 along with the MK circles, and they denote special points in the plane; given any two prescribed positions of a moving plane including their rotation angles, the pole represents the fixed pivot location about which a rigid link would purely rotate that plane from one position to the other. For dyads, the location of poles of the moving plane can be precisely found using Equations (2)–(4), which express the position of the pole relative to the first prescribed position of the moving plane [
2] (p. 119). The image poles express a similar concept but are found by reflecting their corresponding natural pole across a line formed by two other poles. For example, in
Figure 1, pole P
23′ is found by reflecting the point P
23 across the line
.
In
Figure 1, it is observed that although a uniform increment is used for each value of β
3, the solution density of ground and moving pivots is highest around certain poles, and the density is the lowest at the opposite end of the circle. Notice that for the ground pivot circle of a three-position problem, this high-density region forms around pole P
13. While the circles are continuous if an infinite number of points are plotted, this indicates that a larger range of β
3 values have their solution adjacent to the given pole.
Other poles follow the same equation patterns, with any pole relative to position one using Equation (2) (with the appropriate change in numbers, e.g., substitute subscript 3′s for 2′s), and poles between any other two positions are found using Equation (3). Image poles are found by first identifying the base pole (i.e., P
23 to find P
23′), and then using Equation (4).
In which b is the y-intercept coordinate of the line passing through the points P
12 and P
23, m is the slope of that same line, and d is the expression shown in Equation (5). Real() and imag() denote the real and imaginary components of the pole [
14].
Poles have special significance in the dyad solution space. In
Figure 1, the value of free choice β
2 has been held constant, while β
3 was varied. If β
2 is also varied, an interesting pattern emerges. In
Figure 2, six values of β
2 are plotted with the same several hundred values of β
3 as before. Each unique value of β
2 generates a new circle. What makes this outcome so interesting, though, is that each of these circles passes through the same two points, which happen to be the poles.
These properties observed for the MK circles are due to each pole representing a special case of the selected free choices that will be present on every circle. For example, P
13 is a consistent ground pivot solution because of the case when β
3 = α
3. In this instance, the dyad will behave similarly to a single link as it rotates from position one to three, and therefore the only place a ground pivot could exist is P
13. Similarly, P
13 is a consistent moving pivot location because of the special case where β
3 = 0, in which case all motion between positions one and three would have to stem from the rotation of the moving plane about the pivot point K
1. The poles are also useful as they mark points that the Burmester curves pass through for the four specified positions, allowing for a rough sketch of the shape of the curves with limited calculation [
2,
15].
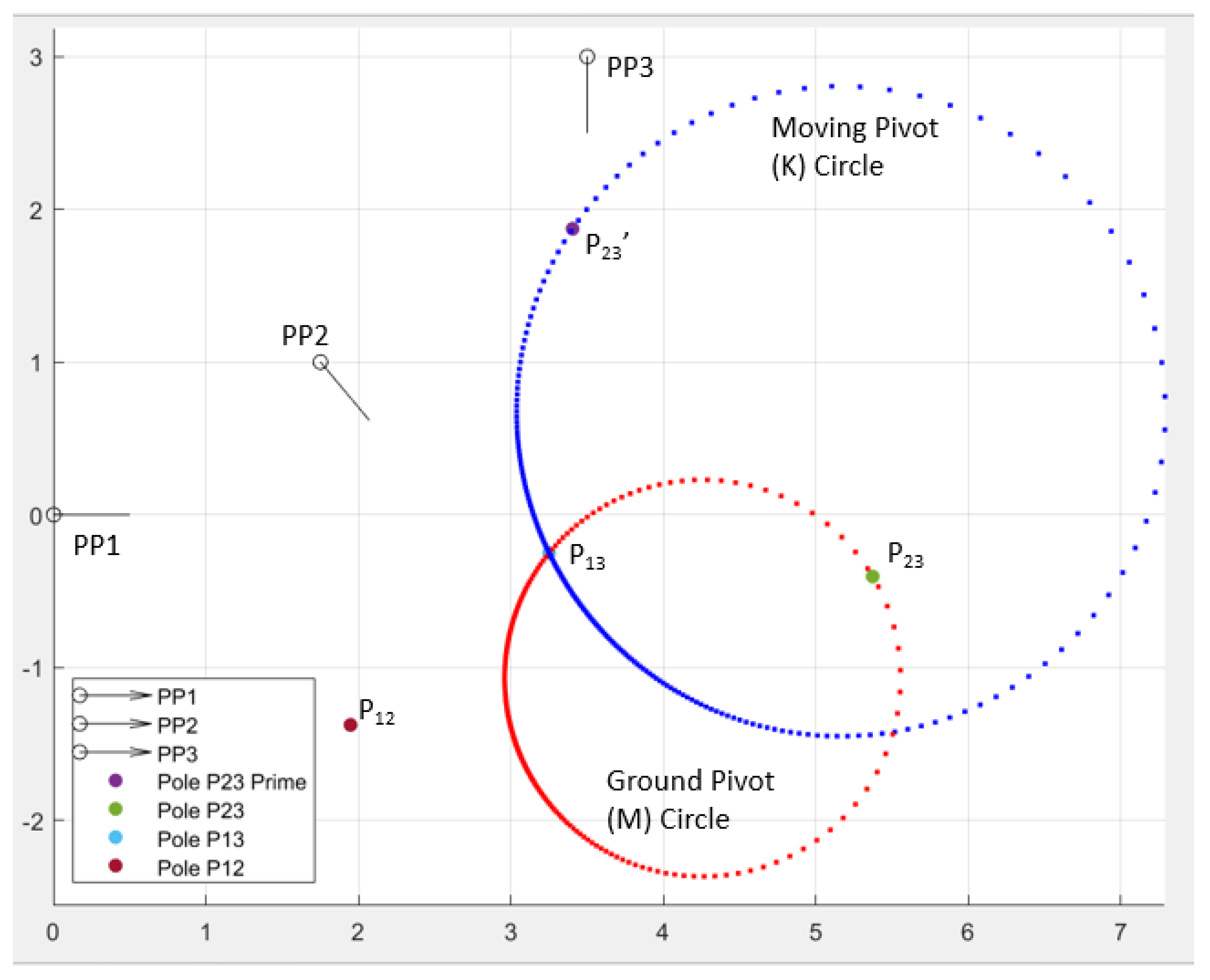
At times it may be valuable to create the circles directly. In this case, there are two primary approaches to finding the center points and radius of the circles. Any circle may be defined by three points which it intersects, so one process is to find three points on each circle and then derive the circle description from these points. The other approach is purely geometric and is derived from the pole positions: for three positions, find each of the natural poles and the image pole P
23′ using Equations (2)–(4). P
13 and P
23 are associated with the M circle, and P
13 and P
23′ are associated with the K circle. To find the circle centers, draw a perpendicular bisector through each of these two pairs of poles. These two lines are the centerlines on which the center points of each circle will lie. For each unique value of β
2, use the angular relationships established in Equations (6) and (7) to find the center points (C
M and C
K) of the M and K circles, respectively.
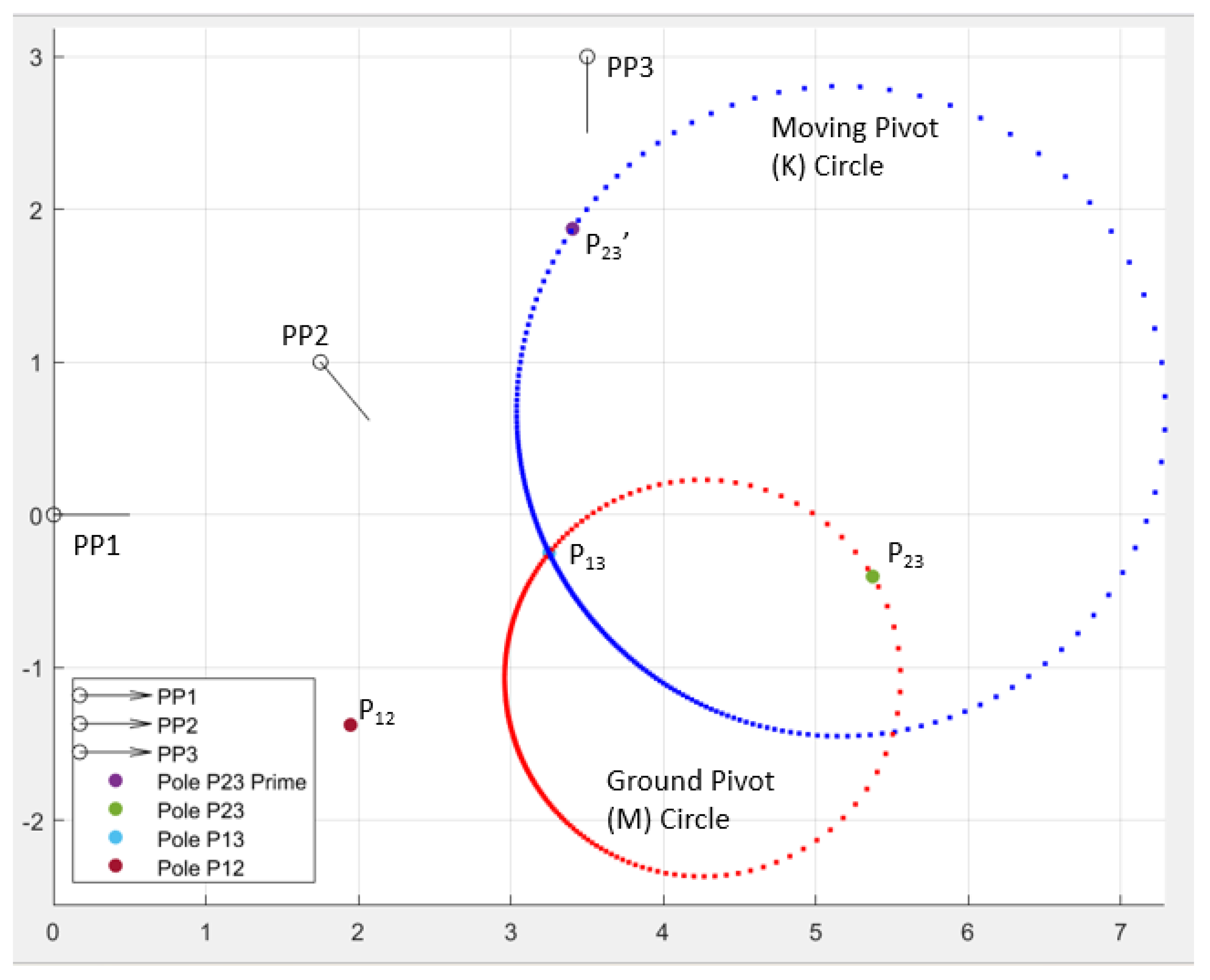
These angles locate the position of the center of each circle. Once located, the radius of each circle is given in Equations (8) and (9). For the M circle, if the value of β
2 is negative, an observer viewing pole P
13 from the center of the circle would rotate clockwise by the angle
to arrive at pole P
23 (as in
Figure 3). If the value of β
2 is positive, the observer rotates counterclockwise from P
13 to P
23.
Using this approach, the complete set of dyad solutions for a particular value of β2 is found without using the standard form equation.
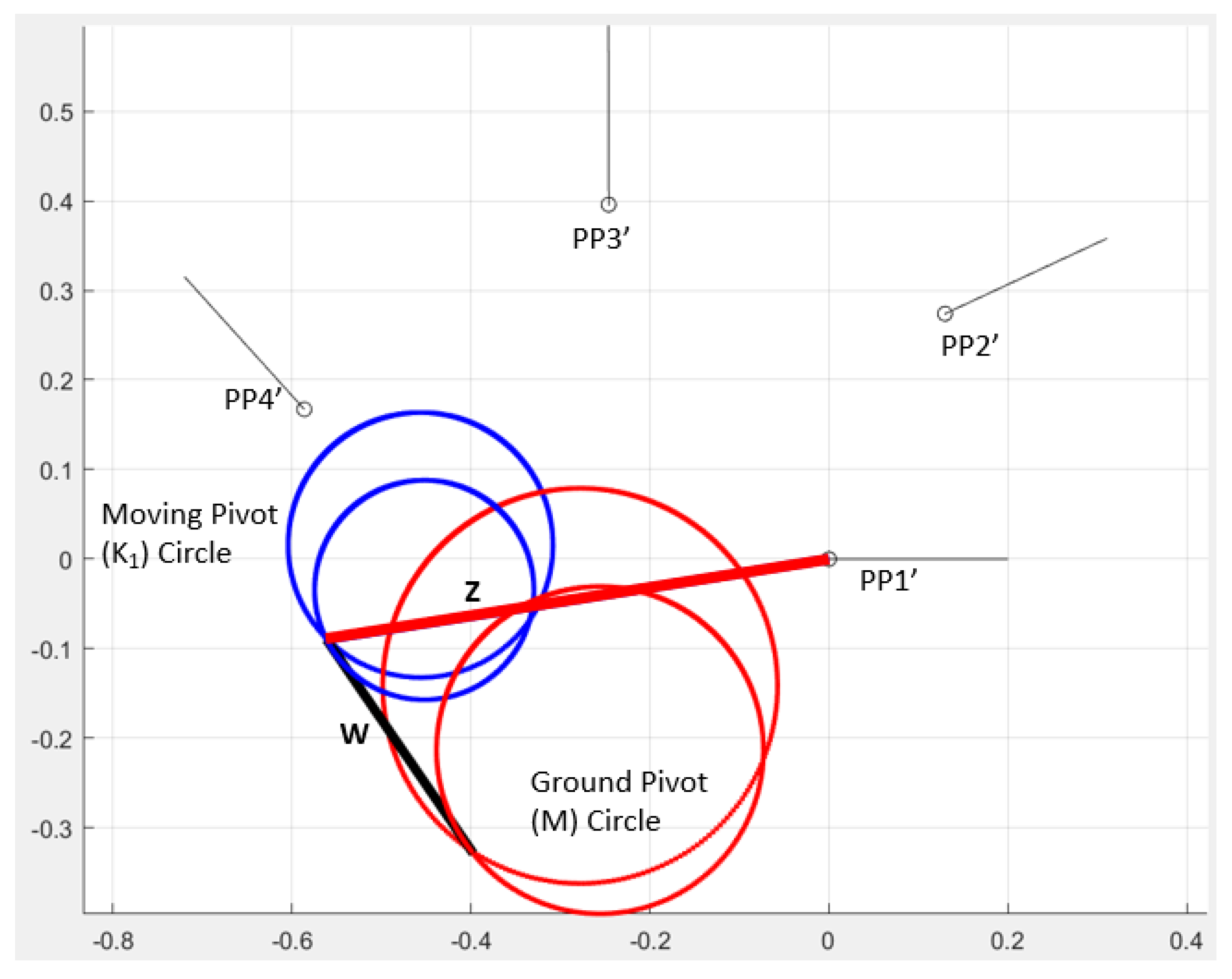
If the motion generation problem requires four precision positions, a linear solution is no longer possible, which at first glance seems to render the MK circles useless, as plotting them relies on a linear solver technique. However, there still is a practical application for them. As an example, consider first finding a possible ground pivot (M location) for the four-position problem; it is impossible to make a single circle that spans the four positions, but the solution can be reimagined as an intersection of two sets of M circles, with each set drawn from three of the four positions. Typically, the first circle is taken from precision positions 1, 2, and 3, while the second is created using positions 1, 2, and 4. Where these circles intersect represents a pivot location that fulfills both the first three positions, and positions 1, 2, and 4. For any given value of β
2, iterating through values of β
3 will generate the 123 circle, and iterating through values of β
4 will generate the 124 circle. The pairs of circles will intersect zero, one (if the circles are tangent to one another), or two times, indicating the number of solutions available for the given value of β
2. These intersecting circle pairs for both M and K circles can be seen in
Figure 4.
For a motion-generation dyad, the maximum number of prescribed positions with an exact solution is five (See
Table 1). There are no free choices in this case. An example figure of the MK circles for a dyad in five prescribed positions is shown in
Appendix B. The geometric formulation introduced in Equations (2)–(9) allows for the formulation of a new algorithm which may be used to identify intersections between these sets of circles in terms of the free choice variable β
2. The procedure is as follows.
First, find the coordinates and radius of each circle in terms of β
2 using Equations (6)–(9). If the inter-center distance between any two circles is greater than r
M1 + r
M2, the circles do not intersect, and no solutions exist for that given value of β
2. Second, the distance from each circle center to the radical line must be found. For any two non-congruent circles, the radical line is the line passing through their intersection points [
16,
17]. These distances are given in Equation (10), where d is the distance between the circle’s center-points.
Using this term, a, the distance along the radical line between the intersection point and the line between the circle centers is calculated using Equation (11).
With the variables a, d, and y
1 determined, all the required information is known to identify the intersection points. The last step is to adjust the coordinate system to align the local system with the global coordinate system. This is achieved by multiplying by unit vectors set in the proper directions. The two vectors are given in Equations (12) and (13) [
18].
These vectors are utilized in the following expression, which locates the one or two intersection points between two circles relative to the center of the first circle.
This function is determined entirely by the value of β2 and the pole positions, which are set by the problem definition. The simplest way to implement this expression for the five-position case is to identify the intersection points between the first two circles, and then find the intersections between the third circle and either of the first two. A viable value of β2 is determined in any case where a matching intersection point is found.
5. Triad Circles
One key difference in finding a single circle set for the triad versus the dyad, is the size of the matrices, and consequently, the number of positions considered. The standard form equations of a triad are shown in Equation (15), for four positions.
See
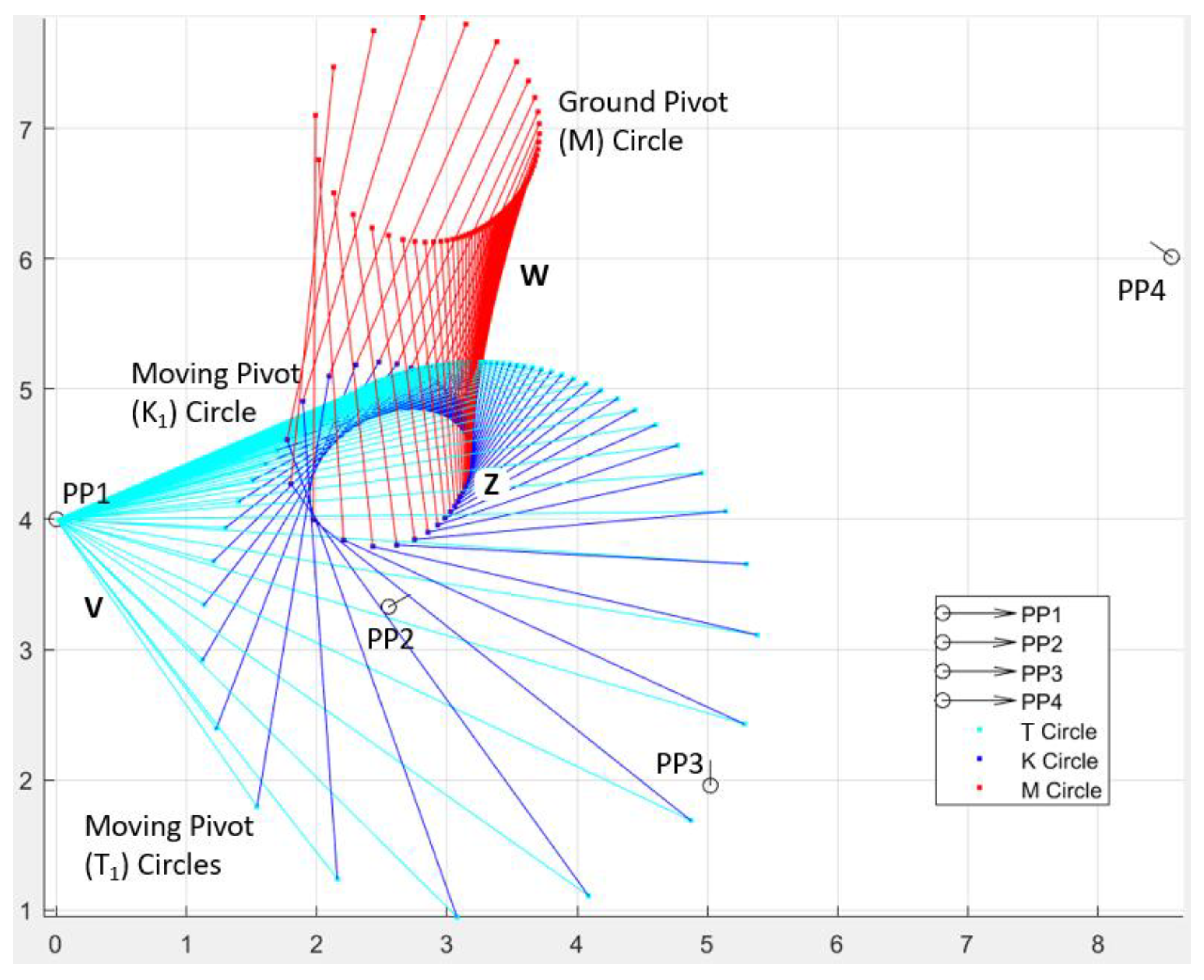
Table 2 for a list of prescribed positions of motion generation of a triad along with the corresponding free choices. This table and Equation (8) reveal that the solution to these standard form equations is linear through four motion generation prescribed positions, where the dyad was only linear in up to three positions. This results in the basic case of the triad MKT circle representing four positions, rather than three, e.g., for the dyad. The MKT circles for a typical triad case are shown in
Figure 5.
One additional difference to note is just how many more variables are at play in triad synthesis for the linear solution case (
Table 2). There is a whole additional set of rotational angles—the gamma values which represent the angular displacements of the third link—and one more rotational angle in each set (e.g., β
2, β
3, and β
4, as opposed to β
2 and β
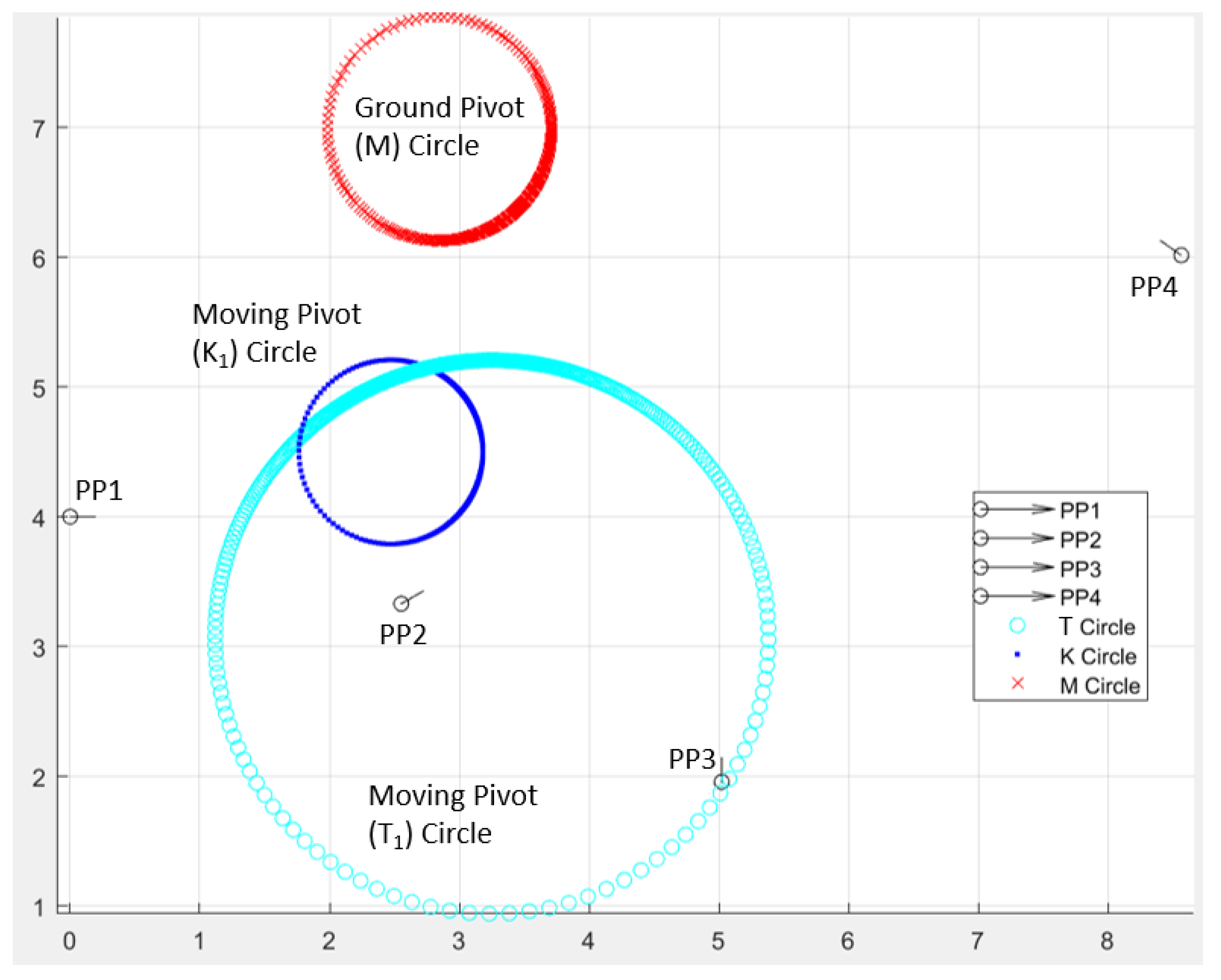
3 for the dyad). An example of varying multiple free choice variables is shown in
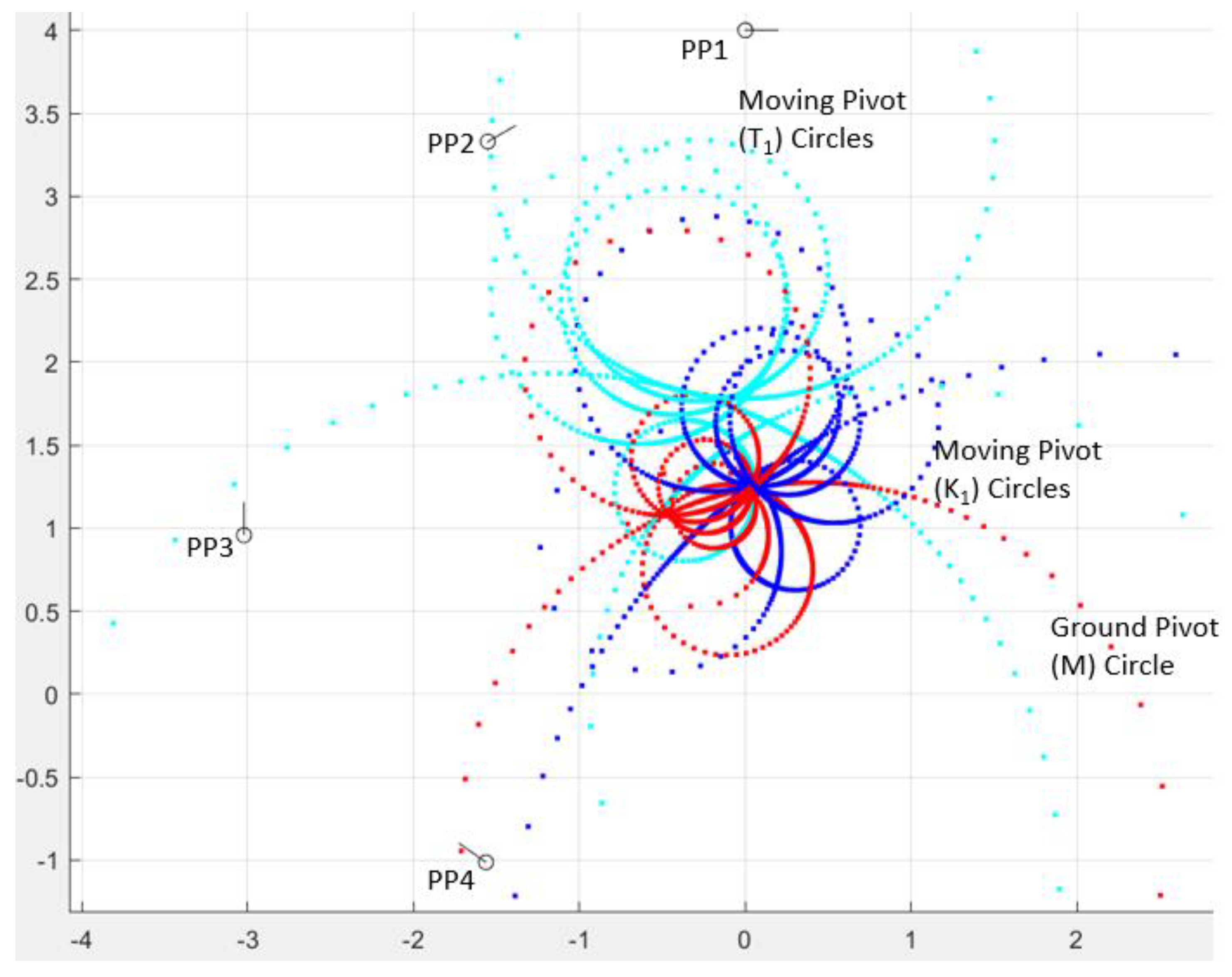
Figure 6. In this Figure, α
2 and α
3 are free choices that locate the center point location of the circles. For each new value of α
2 or α
3 that is plotted, an additional circle emerges. The points on these pivot circles are found by varying the value of α
4 from 0 to 360°.
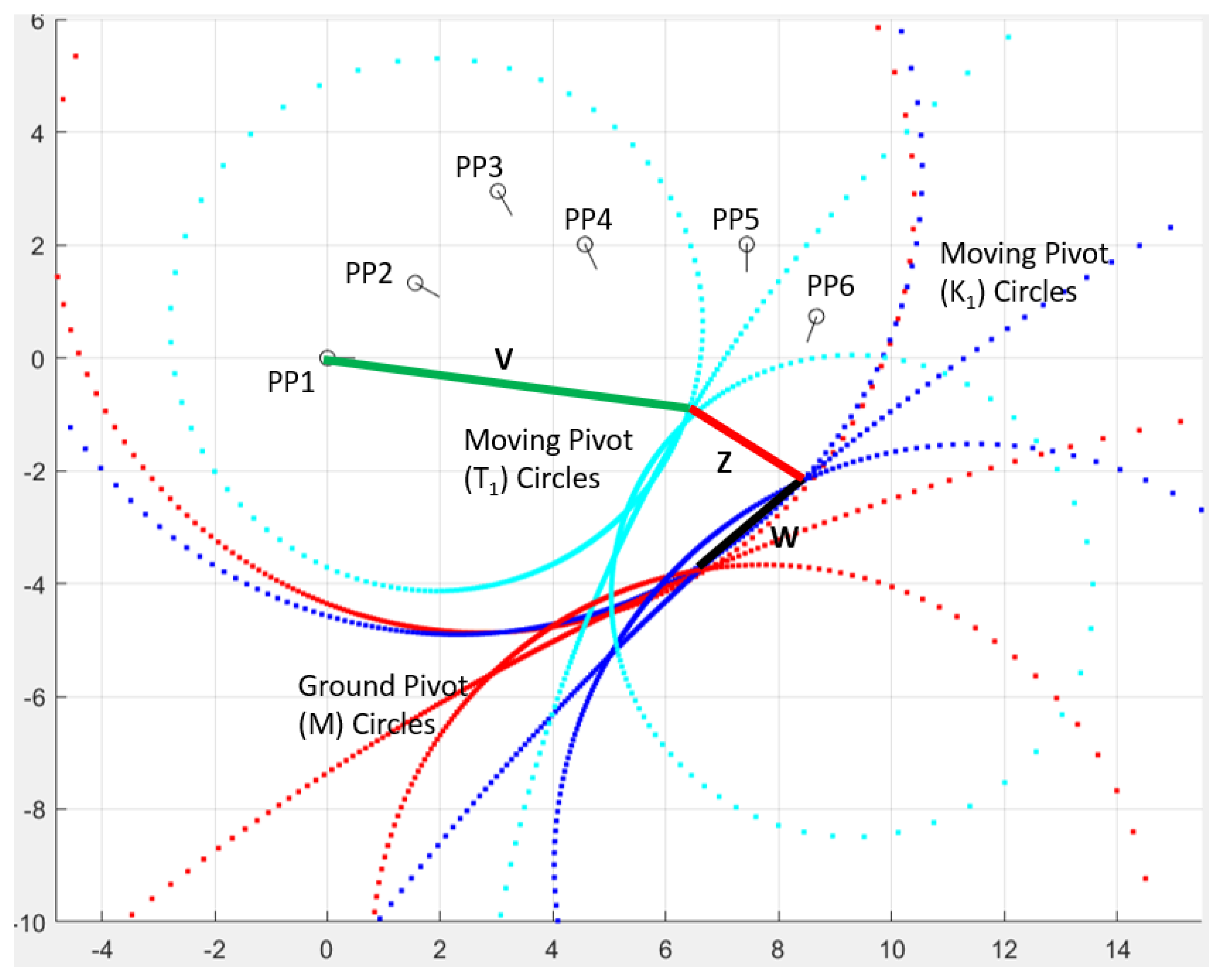
Figure 6 shows six circles of each type (M ground, K
1 moving pivot, T
1 moving pivot).
An astute observer may notice that in
Figure 6 it appears as though the circles are quite close to portraying the pole behavior visible in
Figure 2 for a dyad, with every unique circle in each color-coded set passing through the same two points—revealed in that case to be the poles. However, in this case, there are a few outliers, and not every circle coalesces at the same two points. It seems intuitive that an analogous structure to the dyad poles would exist for the triad, as many similar special cases exist. For instance, if βj = αj, or αj = γj, the triad simplifies to a dyad as Z rotates congruently to W or V, further indicating the existence of special pivot points. A full investigation into the position and properties of these hypothetical triad poles is left for future work, but the concept shows promise for a more complete understanding of the triad solution space.
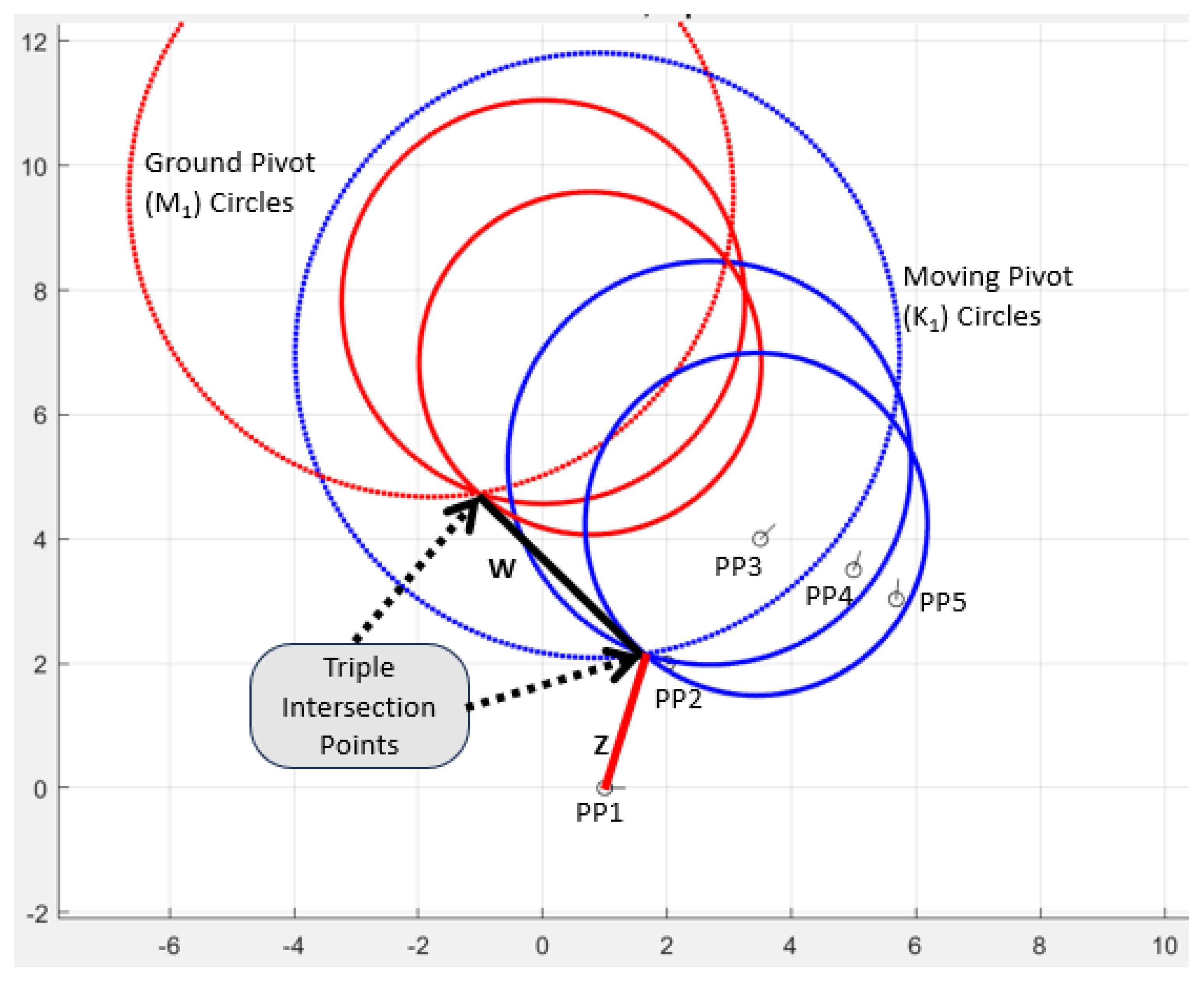
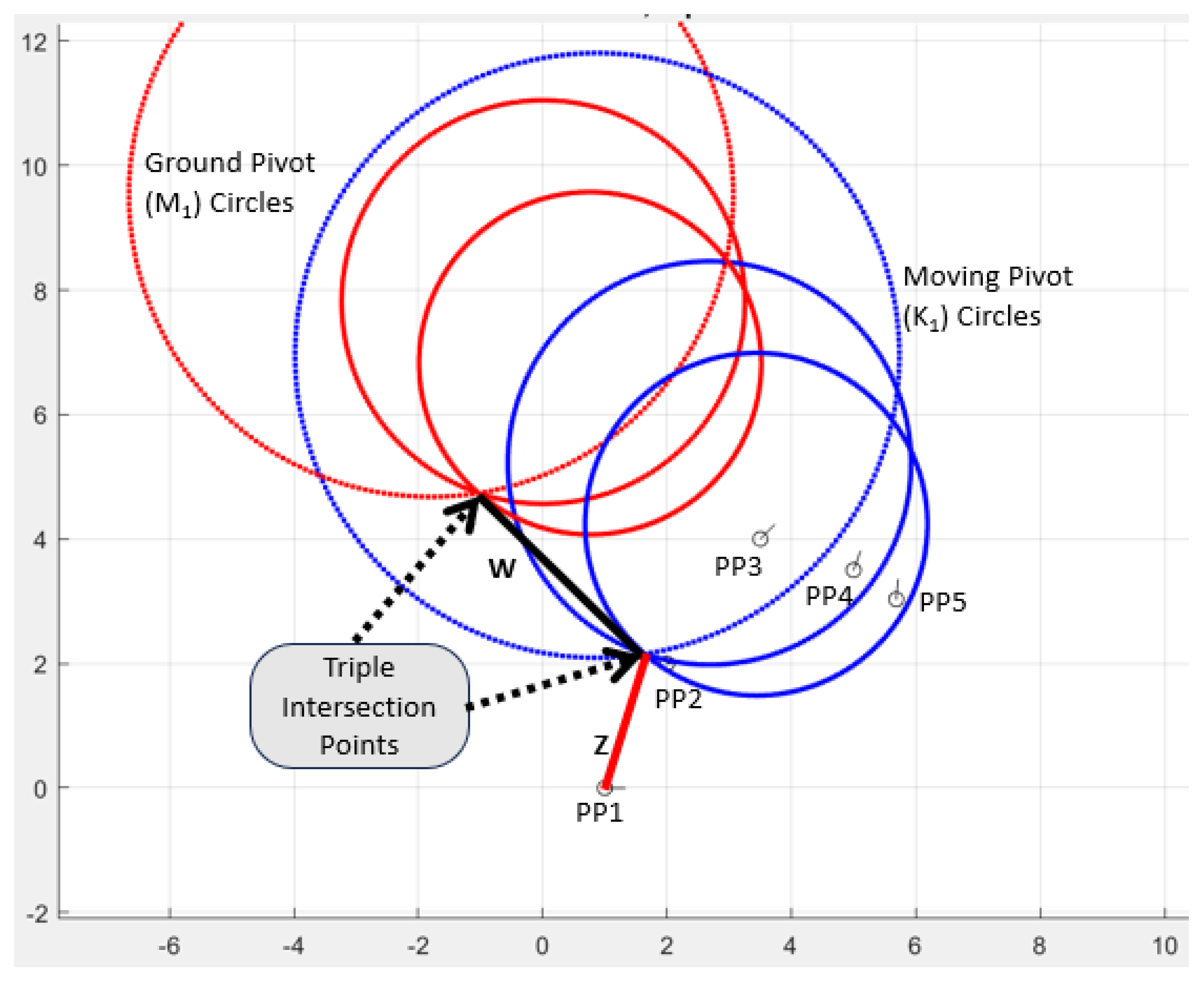
As with the dyad, the triad can be expanded beyond its linear solution case of four positions: all the way up to seven prescribed positions. Solutions are found by identifying intersections between the respective circles.
Figure 7 shows a sample triad for five prescribed positions. Figures depicting the six- and seven-position cases are included in
Appendix B.
Although the dyad in five prescribed positions similarly required a three-way intersection and did not allow any free choices, the triad in six prescribed poses does still allow one free choice. Typically, this is chosen as either β
2 or α
2. The solution is found at the three-way intersection of circles formed from positions 1,2,3,4, 1,2,3,5 and 1,2,3,6. A designer may make a free choice for the value of β
2, then solve for the value of β
3 which produces a triple intersection point (if indeed any exist, not all values of β
2 are guaranteed to produce a valid solution) [
5] (p. 43).
Figure A5 depicts a triple intersection point for a triad solved for six prescribed positions. In
Figure A6, a solution triad is shown for a problem defined by seven precision positions. In the seven-position case, four circles must intersect at a single point, and the designer has no free choices. This makes the seven-position case quite difficult to implement practically, as solutions are extremely limited.
6. Example
To demonstrate the kinematic synthesis solution procedure for a mechanism made up of dyads and triads, the MK and MKT circle methodology presented above is applied to a practical mechanism example. One common aesthetic and practical challenge in cabinets and boxes is how to implement the hinges to open the container lid. Perhaps the most used and inexpensive solution is a simple external single-axis hinge. However, external hinges have their drawbacks. They are difficult to conceal, potentially hampering the aesthetics of the container, and they take up space on the outside. Oftentimes kitchen cabinets will use external hinges, but the cabinet doors then need to be spaced far enough apart to allow space for these hinges. To solve this issue, internal hinges may be used. However, due to the thickness of the cabinet doors, single-axis hinges need to be inset into the cabinet door, or else they will be physically impossible to open. Moving beyond simple hinges, a linkage mechanism can resolve these challenges, as a mechanism allows for both translational and rotational motion. Here, a lid/door opening mechanism will be synthesized which first pushes the lid laterally away from the container, and then rotates the lid open, allowing the mechanism to reside fully inside the container.
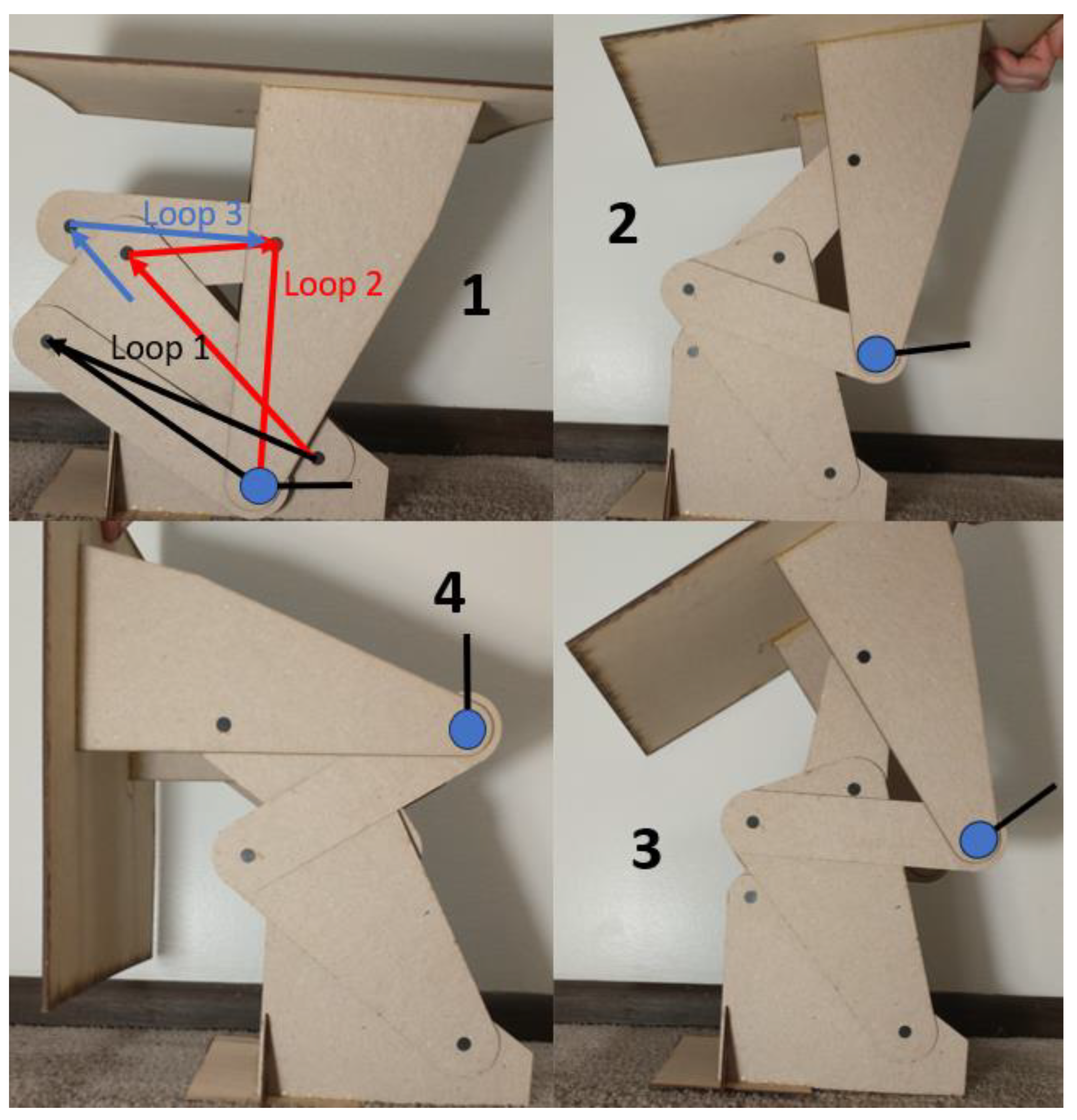
Solution: first, a basic linkage topology must be selected. Based on observation and experience it is doubtful whether a basic four-bar linkage would be able to achieve the desired translation and rotation while still fitting inside a reasonably small space. The Watt 1 six-bar mechanism is known for producing complex motions, so that is the linkage topology selected. This mechanism is shown with its dyad and triad loops highlighted in
Figure 8.
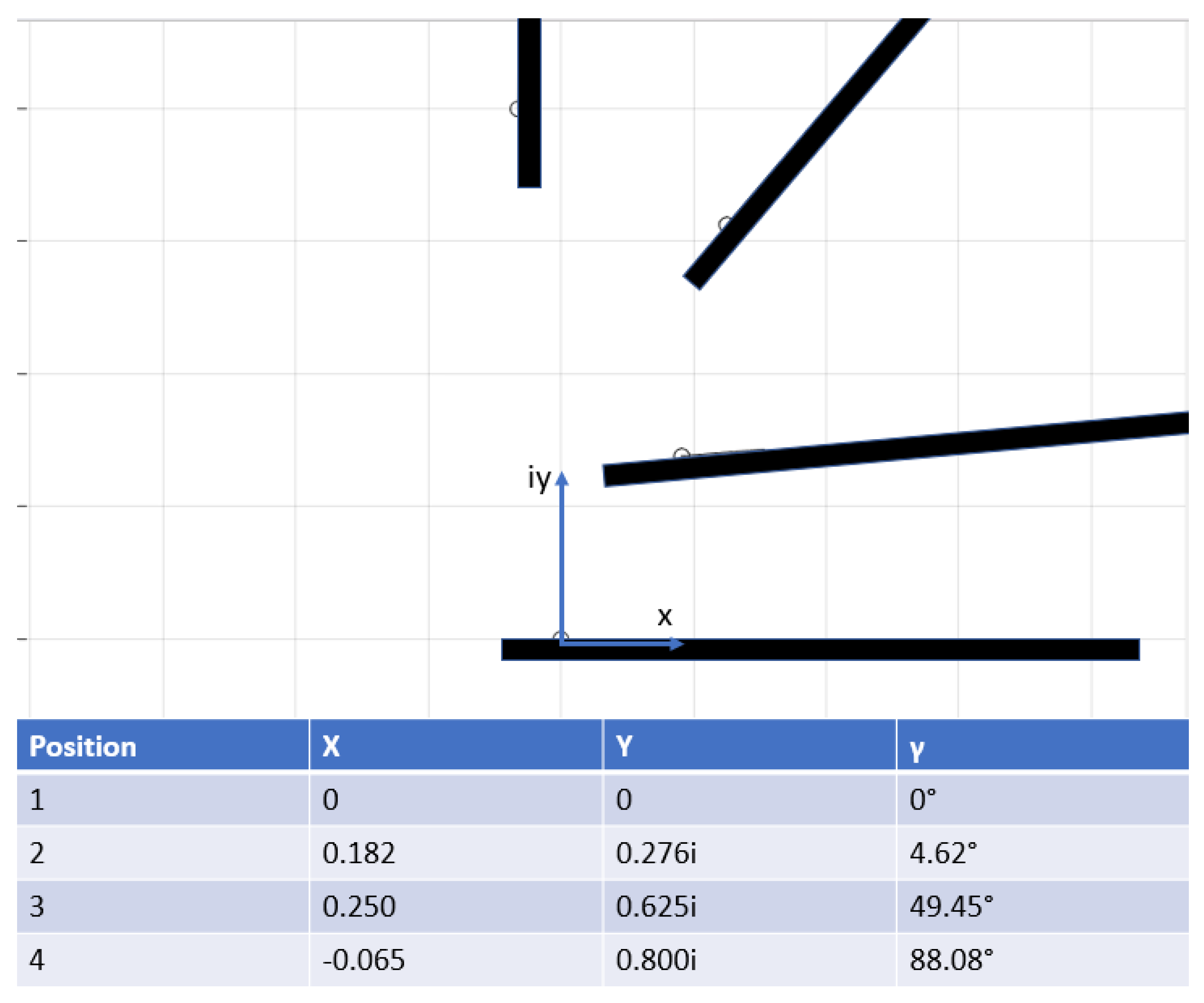
This problem will be solved using four prescribed positions of the motion generation link, here chosen as the third link in the triad. The first two positions will guide the translation of the lid away from the container, while the next two focus on rotating the lid away from the opening, as shown in
Figure 9.
To synthesize the Watt 1 mechanism, first, the dyad identified as loop one in
Figure 8b is synthesized. Then, the triad (loop two) is designed; note that the triad loop shares a ground pivot and the rotation angle β of its first link with the loop one dyad. Finally, the third loop (another dyad) is synthesized. This dyad’s ground pivot location is completely free of the other two, but its second link shares its rotation angles with the second link of the triad. The key synthesis process details are summarized in
Table 3.
6.1. Loop One
The first dyad has additional free choices that are not afforded to the other loops. In the topology shown in
Figure 8a, the displacement angles of the first link are the same as the first link of the triad. This means that both the β
j and α
j angles are initially free selections for this dyad, but their values have great implications for the other two chains. Thus, even for four prescribed positions, there are many more possible solutions for this dyad than can be represented by a single selection of input parameters. In
Figure 10, the MK circles for the selected four-precision position dyad problem are shown.
6.2. Loop Two
The synthesis procedure becomes a bit more complex with the introduction of the second synthesis loop, the triad. Here, to affirm the Watt 1 topology, the ground pivot location must be specified to match the dyad formed in loop one. Additionally, all the β and γ angle values are specified, as γ
1–4 are given in the problem definition, and β
1–4 must match the β values of the dyad calculated in loop one or else they cannot combine into the single ternary link 2 in
Figure 8a. This means that only the α angles remain unprescribed. Any of these three α
j angles may be chosen as a free choice, but the other two must be solved for. One way to do this with the MKT circles is to iterate through many values of α
3 and α
4 for a given value of α
2, then pick out the set of pivots based on whichever set produces a matching ground pivot to loop one. While inexact, designers should be able to quickly find matching solutions within four or five decimal point accuracy by increasing the number of selections considered for α
3 and α
4. This procedure is applied in
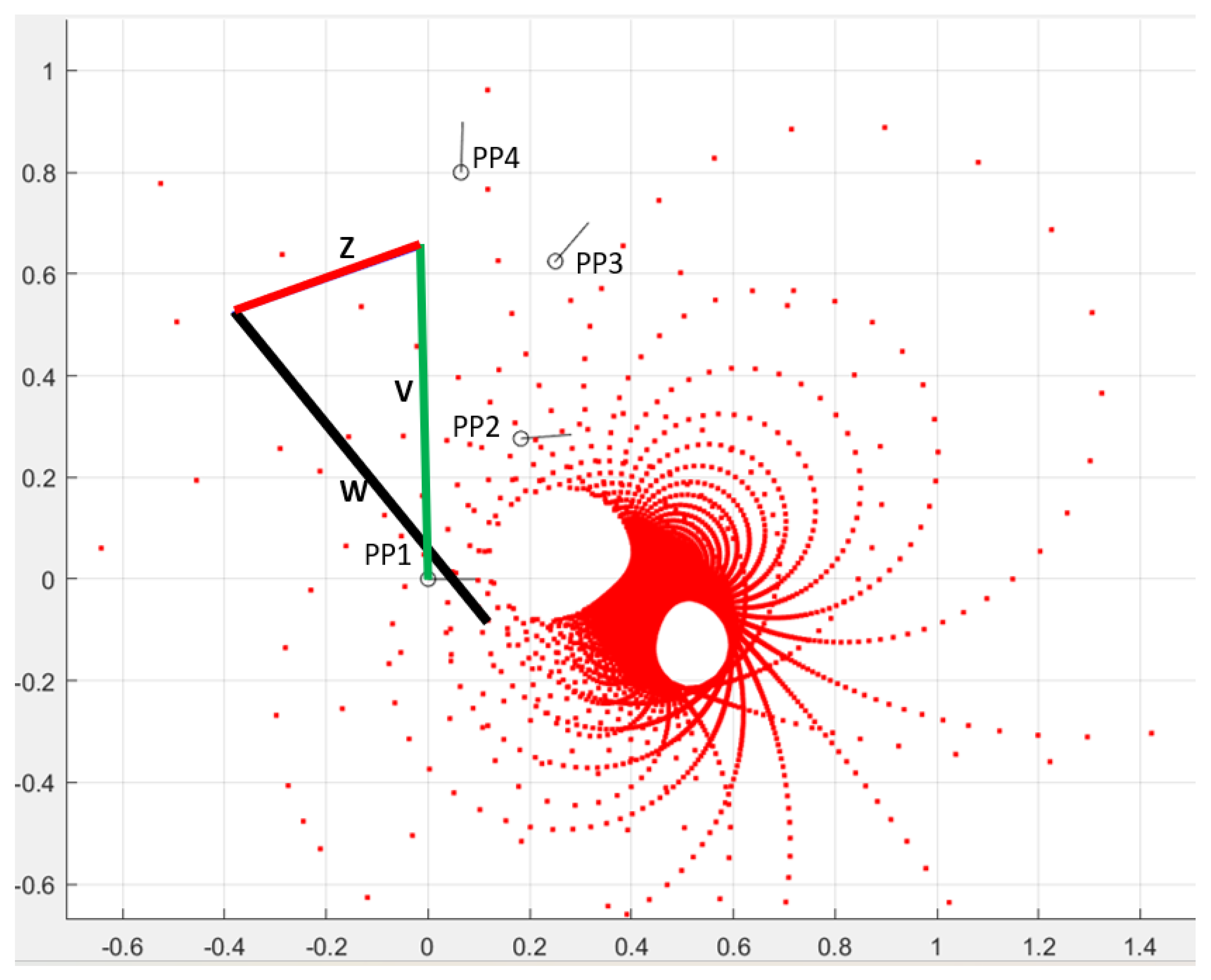
Figure 11. Only the ground pivot circles are shown, with 50 circles plotted comprised of 200 points each.
Many designers will find it informative to generate and examine
Figure 11 prior to synthesizing the loop one dyad, due to its ability to reveal so-called ‘forbidden regions’ [
1,
2,
3,
4]. These are areas in the plane where no viable ground pivot solutions exist, despite a high solution density elsewhere.
Figure 11 shows two of these pockets, with one centered around (0.55, −0.1) and the other just above the selected ground pivot around (0.3, 0.05). Varying the value of α
2 will cause these regions to shift, but if a particular value of α
2 is desired for the triad, it may be necessary to reassign the free choice values of the loop one dyad to make finding a viable solution possible.
Once again, each circle represents a unique angle value of α3, and each pivot point on the circles is plotted via a unique value of α4 (or vice versa). So, once the matching ground pivot point is identified, the values of α3 and α4 are inherently known—they are whichever two values were used to create that point. In this example, the solution is found when α3 = 90.062 and α4 = 132.141 degrees, based on a free-choice value of α2 = 24.919 degrees. This value of α2 was selected after some trial and error with the final mechanism construction, as the value appeared to produce favorable motion results.
6.3. Loop Three
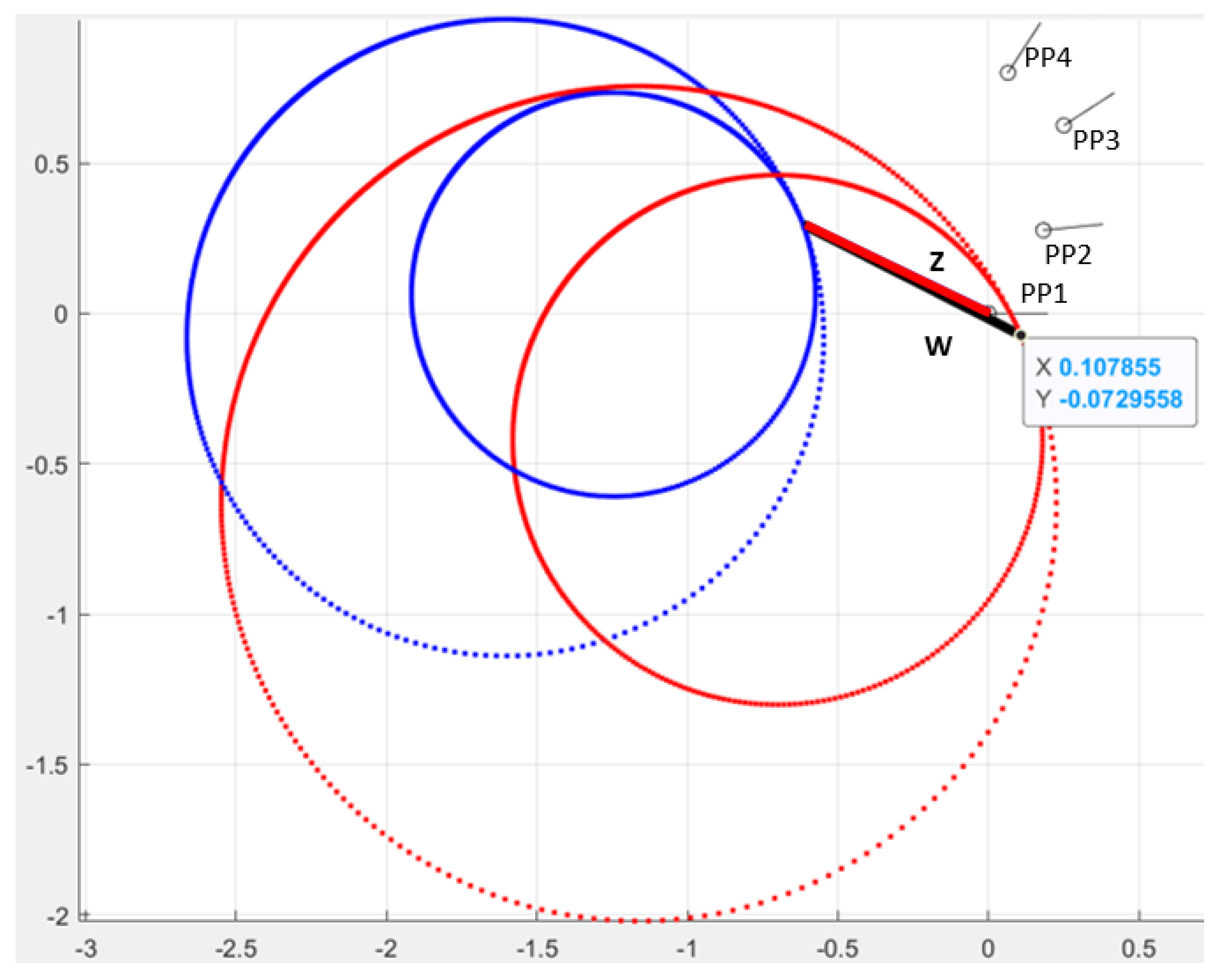
The second dyad may be synthesized in the same manner as the first dyad—finding the intersection of two sets of MK circles. Now that the triad chain has been identified, the α
j angles for the loop three dyad are prescribed, as they must match with the α
j values of the triad to form link five, shown in
Figure 8. It is also important to note that the precision positions are no longer those specified in the first two loops, but rather the distal precision position minus the
V vector of the triad at this position. This new distal displacement is symbolized by
, determined as shown in Equation (16).
This is due to the chosen loop configuration for the Watt 1 topology shown in
Figure 8, which requires that the second dyad extend up to the end of the second link of the triad. This also means that rather than using the γ
j angles to define the motion, the α
j angles of the triad define the motion.
For this second dyad, there is no ground pivot specification required, meaning any candidate solutions that meet the overall design parameters will be sufficient. The problem can be quickly solved using the standard MK circle approach, as shown in
Figure 12. To show that loop-based approaches to assembling multi-chain mechanisms are interchangeable, this second dyad was also synthesized using the previously developed compatibility linkage approach [
5]; a sample calculation is shown in
Appendix A.
All the required synthesis information for the Watt 1 mechanism is now compiled. The final step is to combine the necessary segments from different loops and assemble the completed mechanism. It is important to note that this solution procedure does not have built-in checks for circuit, branch, or other types of motion defects that could prevent a mechanism from operating as intended. Identifying and eliminating these defects will require some additional work after the initial synthesis process has been completed. Finding and eliminating defects has been a field of extensive study in kinematic synthesis [
19,
20,
21,
22,
23,
24]. Balli and Chand wrote an effective review of these topics which can be found in reference [
25]. An image of the completed mechanism in its four prescribed positions is shown in
Figure 13. For this prototype, the mechanism was scaled up by a factor of 10 to increase the ease of prototype construction and to make the motion more visible. The key unscaled linkage parameters are summarized in
Table 4.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}