
Predictive Speed Control of a DC Universal Motor Applied to Monitor Electric Vehicle Batteries




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
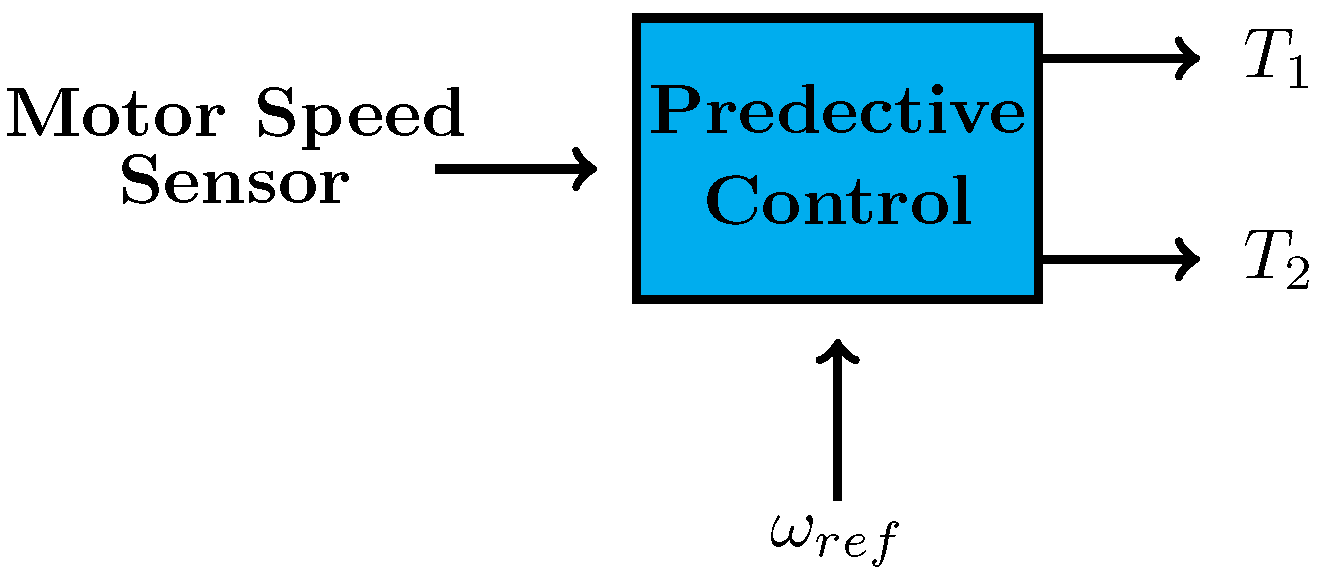
- Design a predictive controller to regulate the angular speed of a bidirectional DC-DC converter. This control strategy must be robust against system faults.
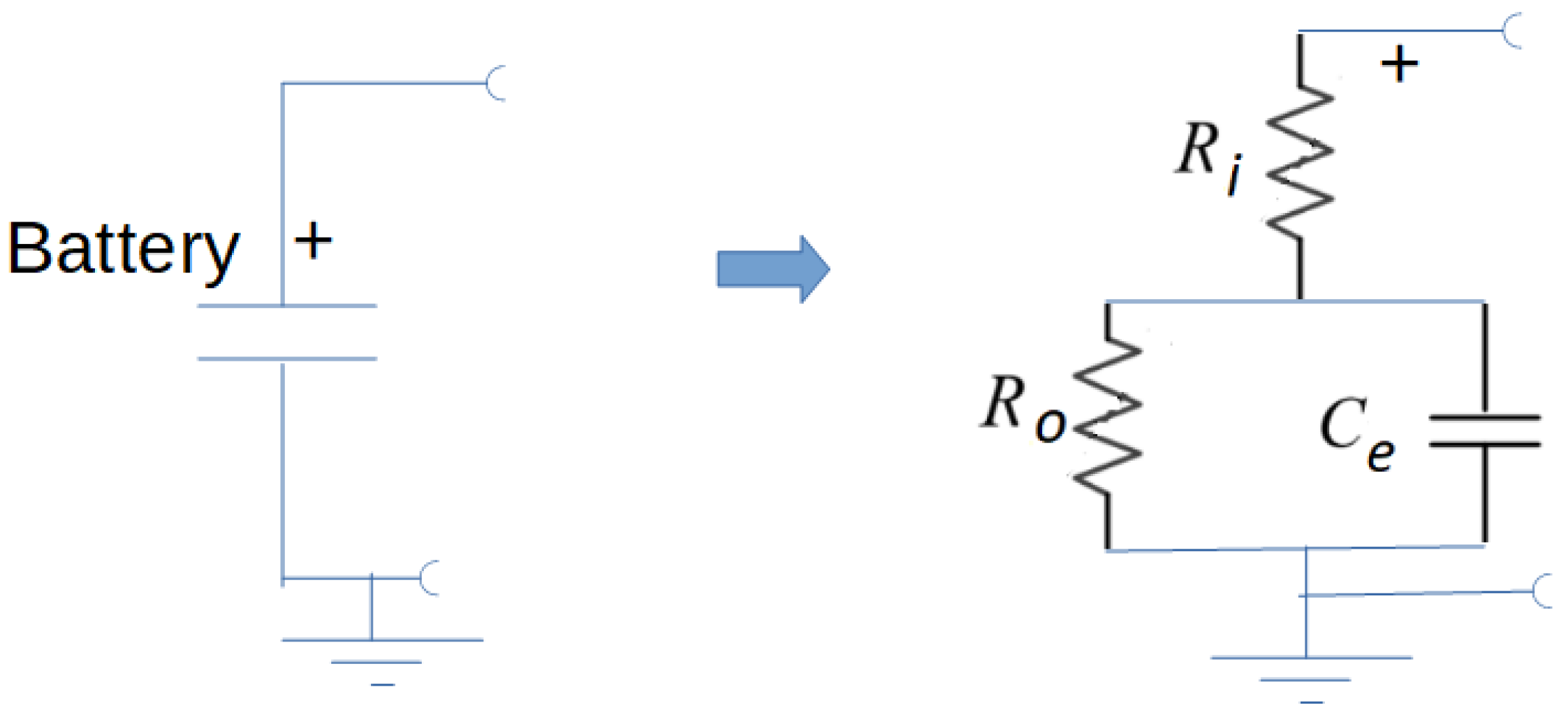
- Design a fault emulator for an electric car battery emulator by modifying the DC-DC experimental platform by adding an external capacitor. This modification captures damage to the charge capacity of an electric battery.
- Propose a statistical fault detection algorithm to capture the failure behavior of the battery.
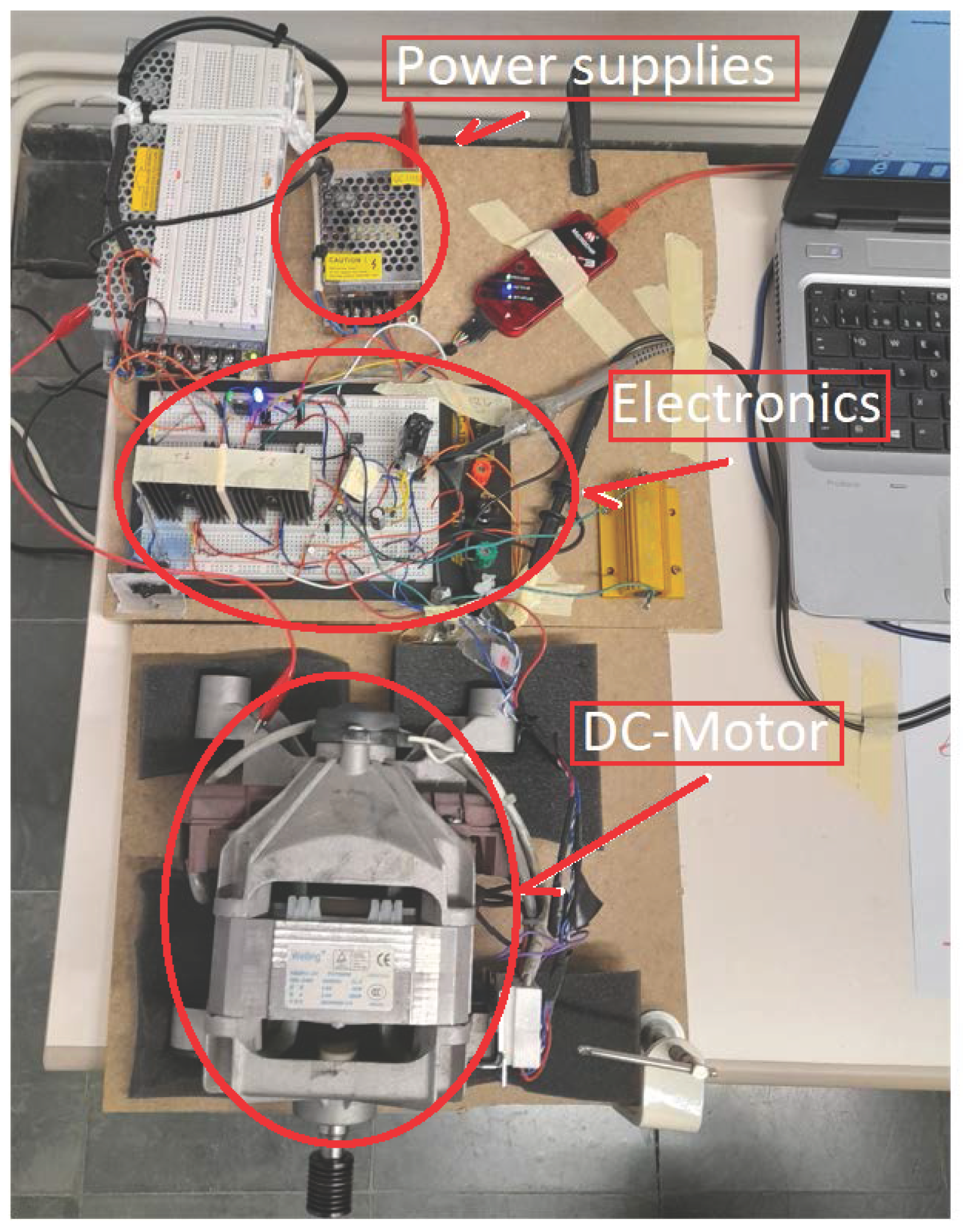
- From the point of view of electronics, we designed an experimental platform capable of emulating the energy management between a battery and an ultra-capacitor.
- From the point of view of statistical data analyses, our approach can discriminate between healthy and faulty cases of the ultra-capacitor model on our experimental platform.
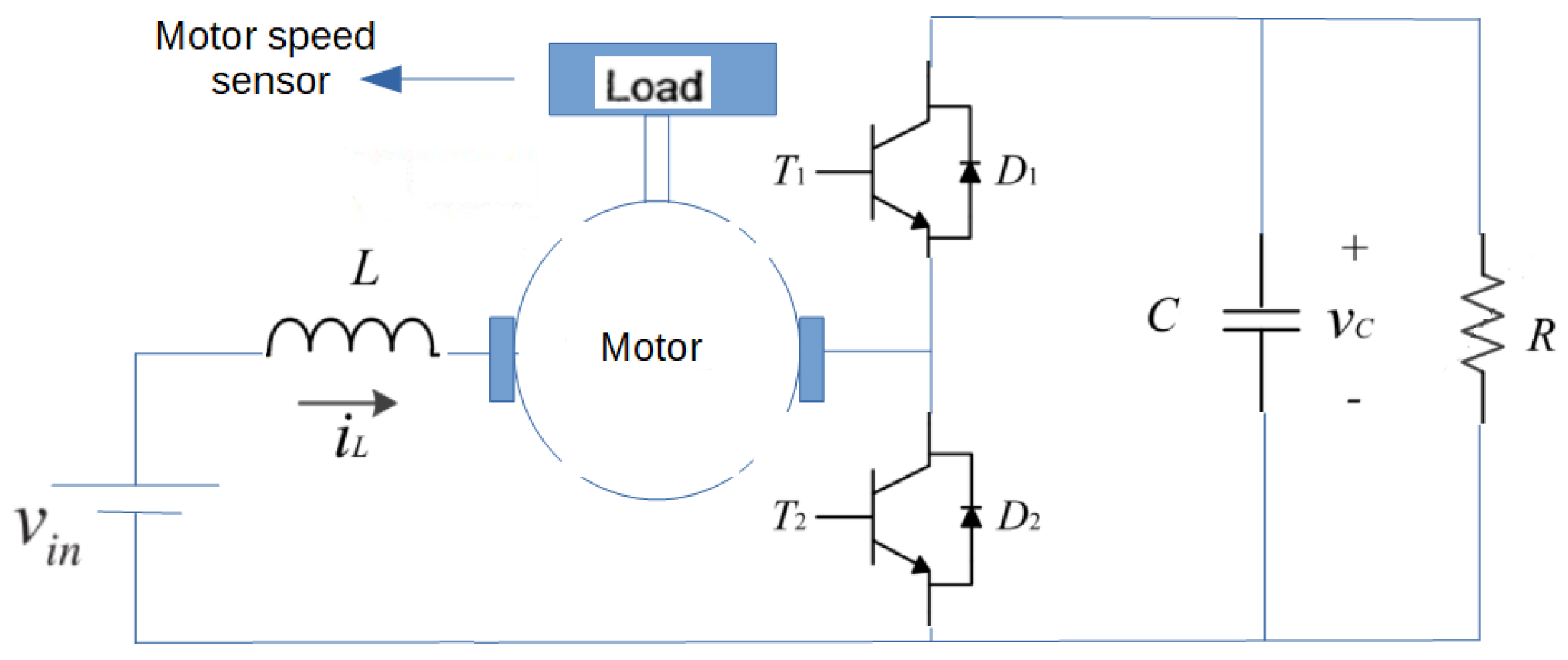
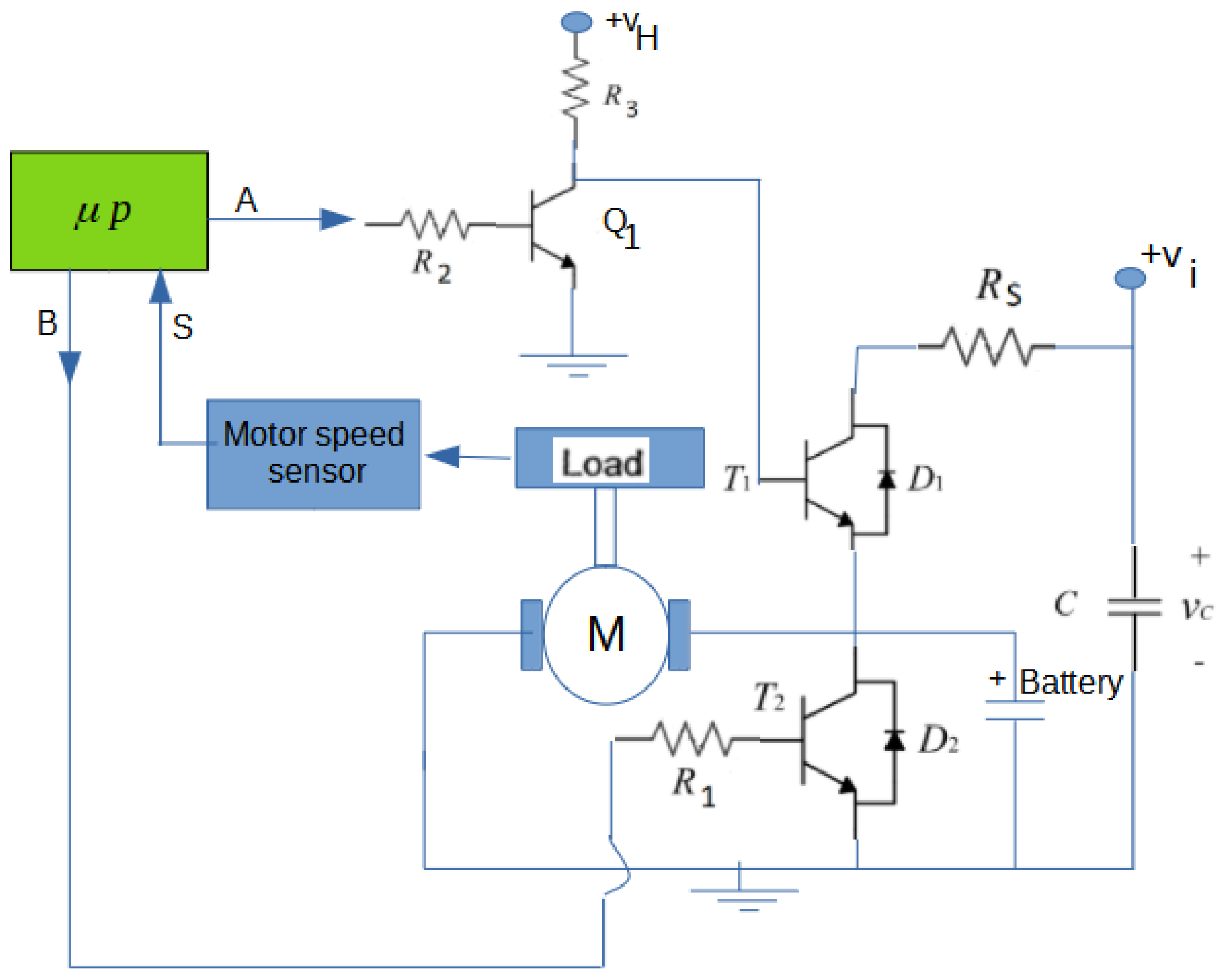
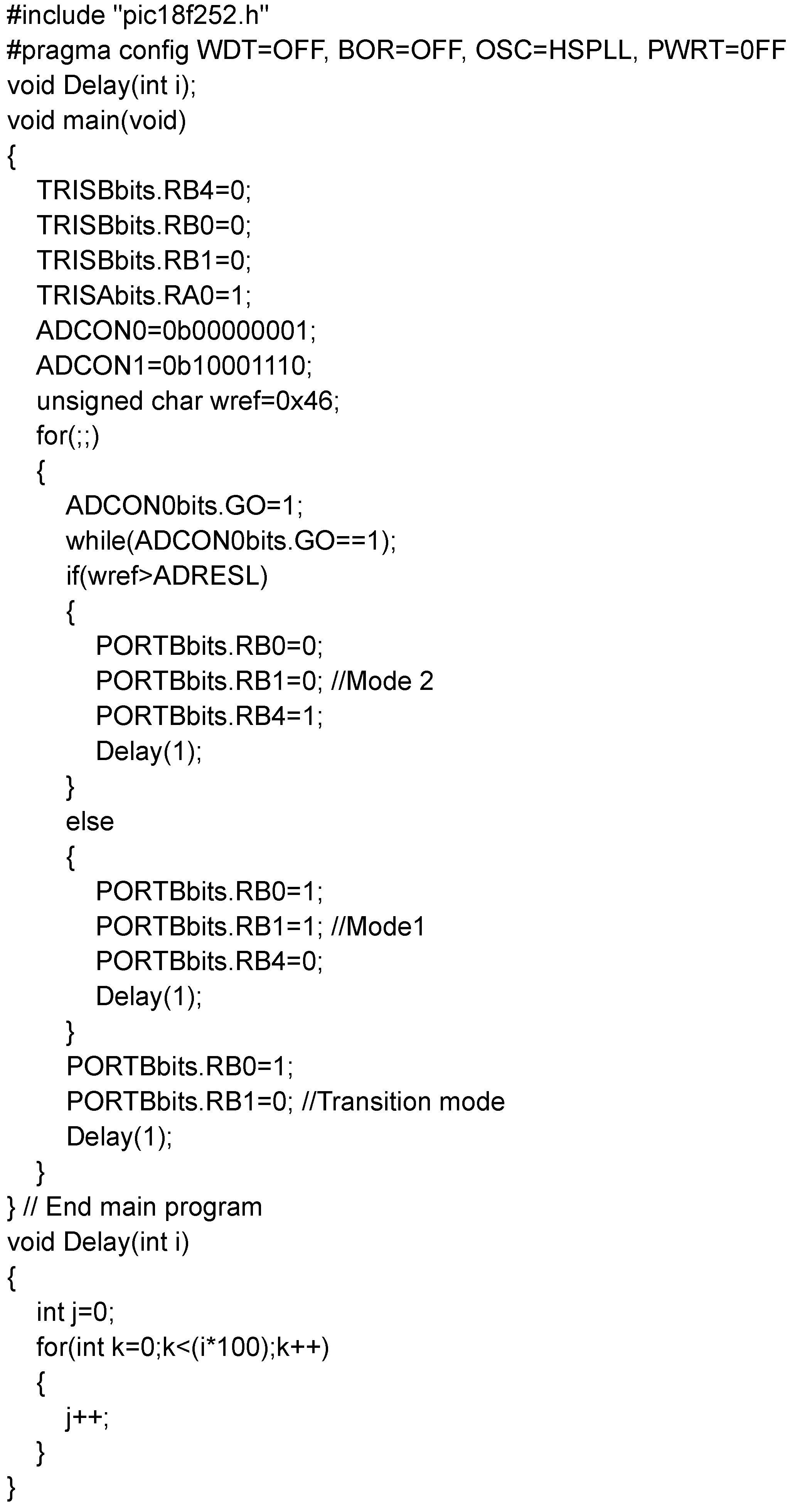
2. The Bidirectional DC-DC Converter Configuration
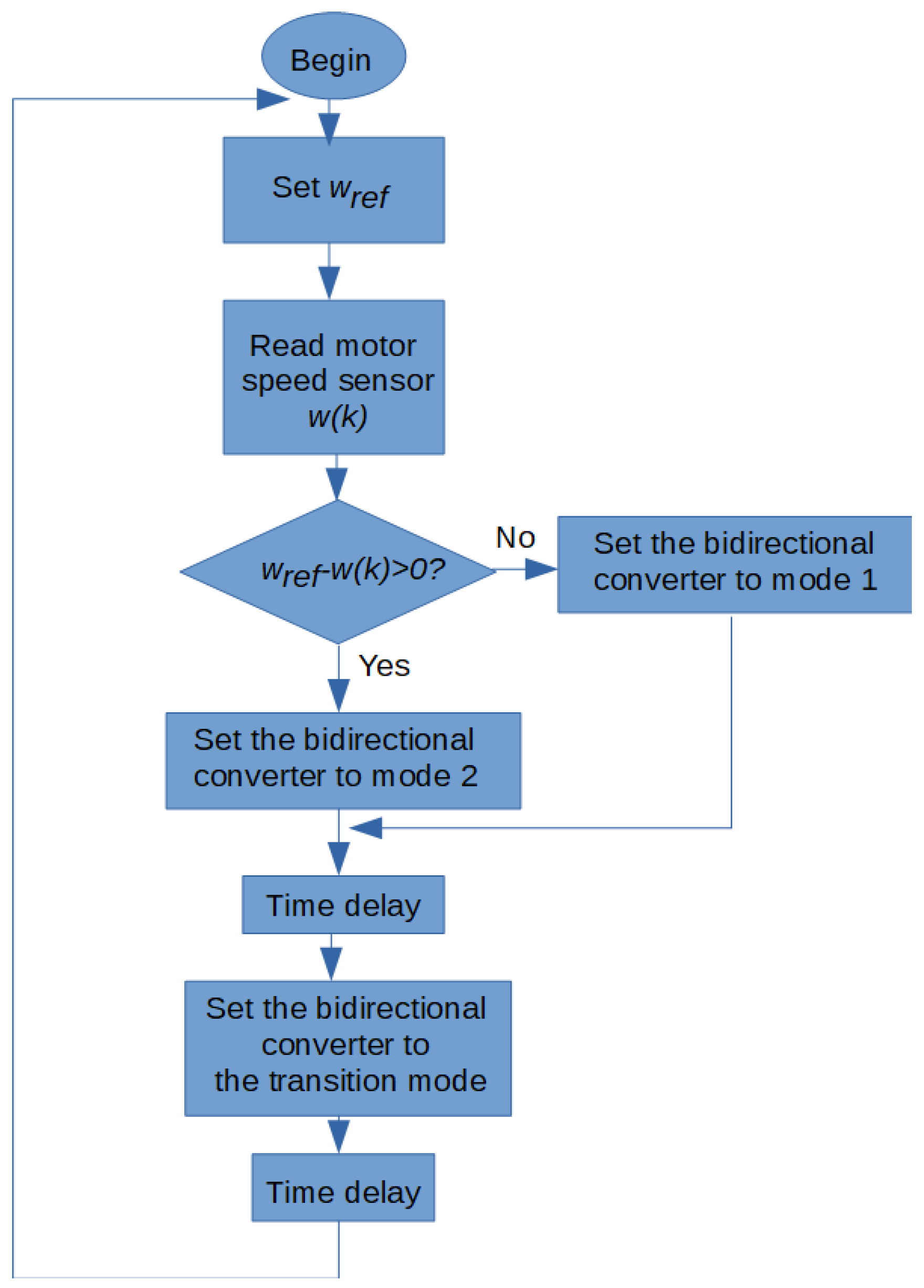
- Mode 1: transistor is turned on and is turned off. The current increases almost linearly. Then, the capacitor is discharged through the electrical load R.
- Mode 2: transistor is turned off and is turned on. The current decreases almost linearly. In this mode, the capacitor is charged. The electrical load R also receives electrical energy.
3. Mathematical Model of a DC Motor
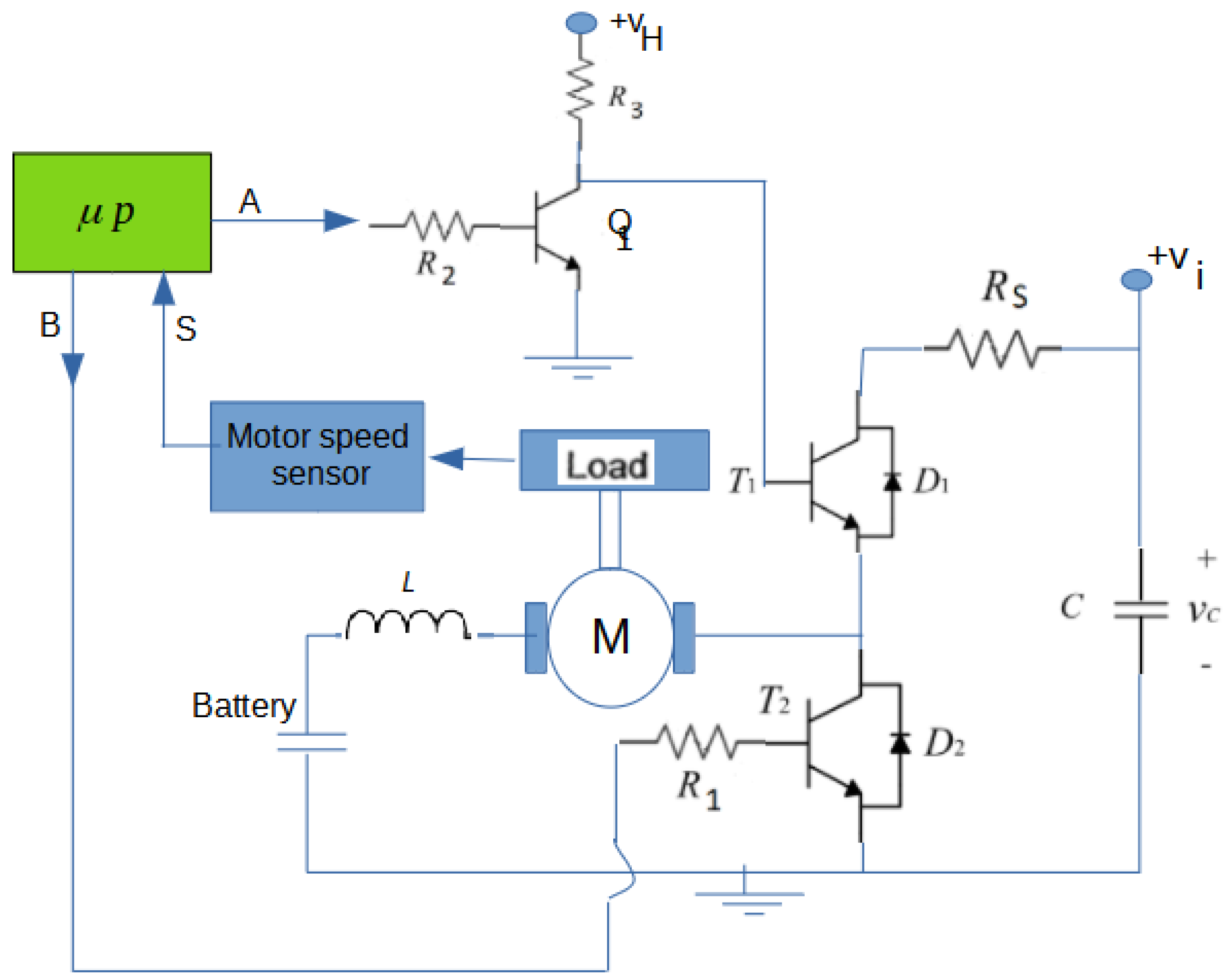
4. Experimental Platform Design: The Short Circuit Battery Set-Up
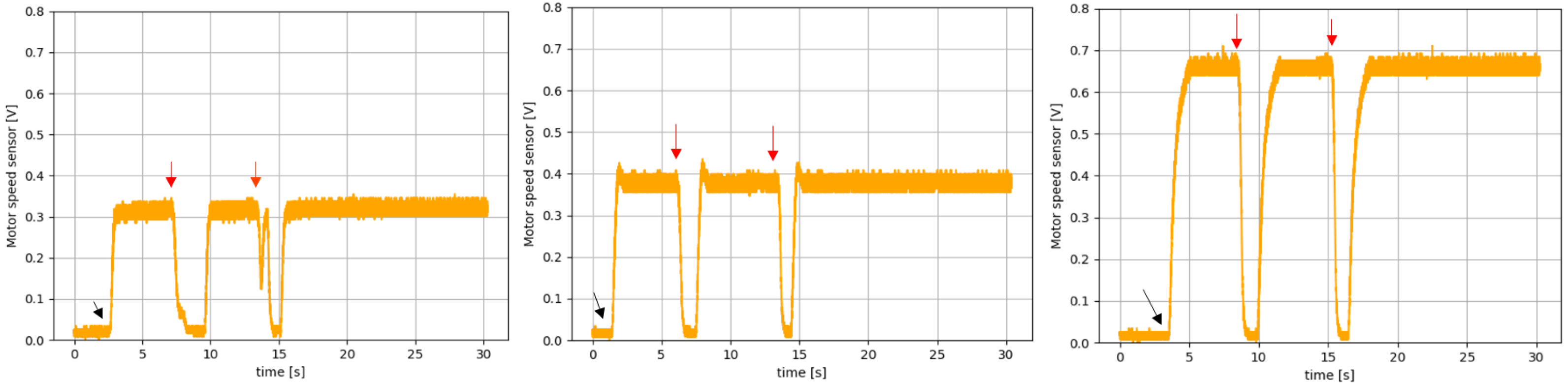
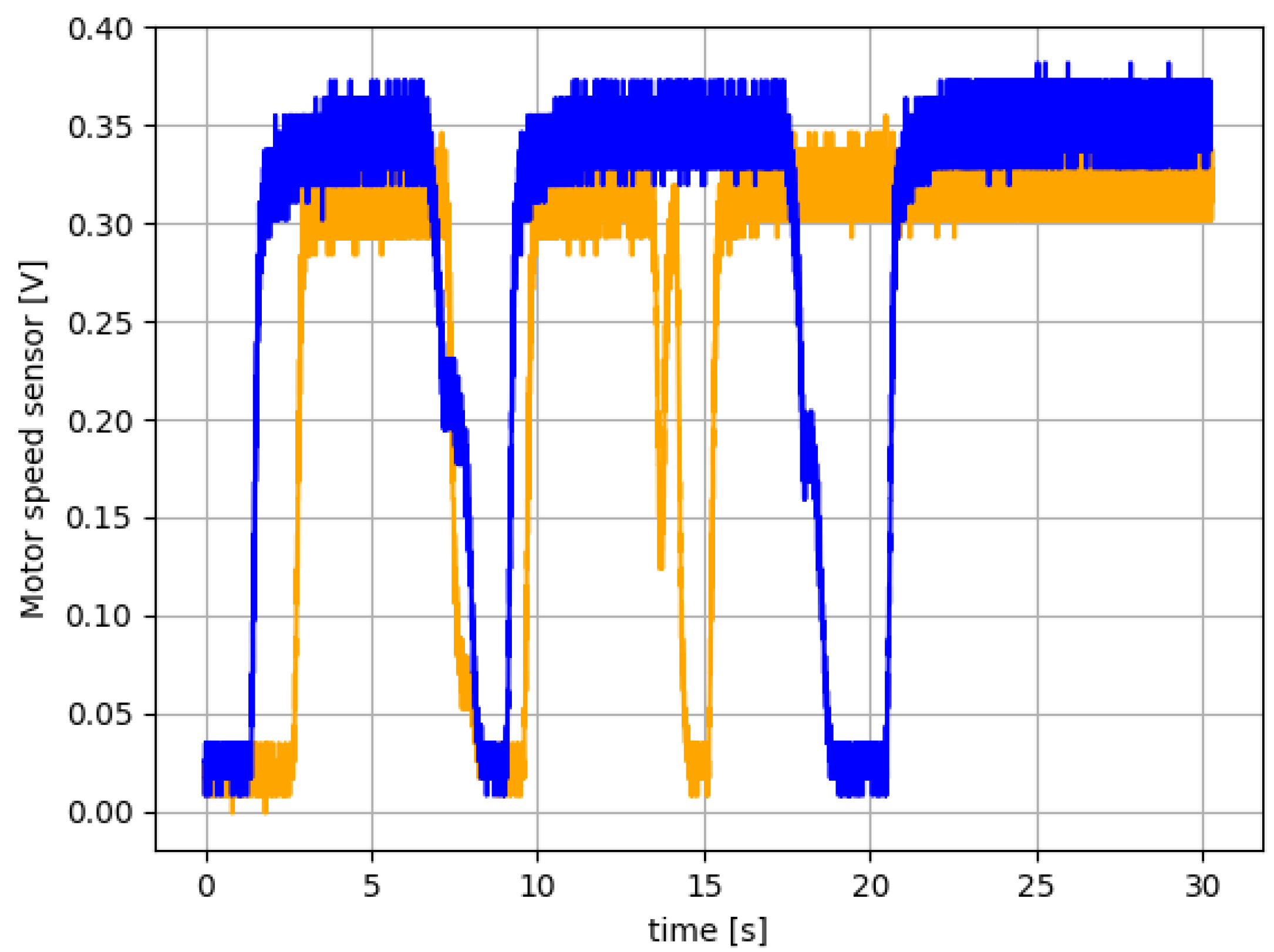
5. Short-Circuit State Experimentation
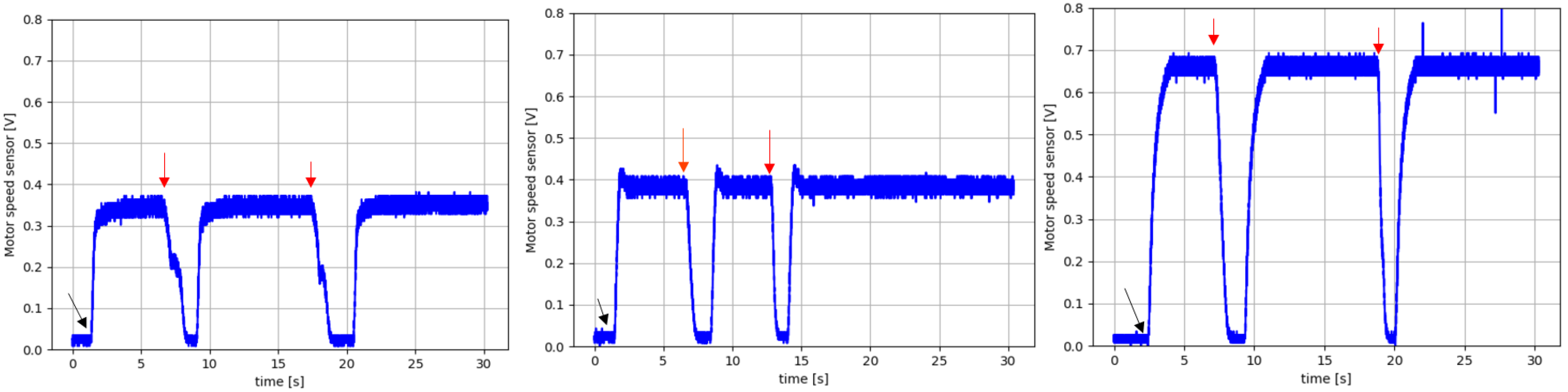
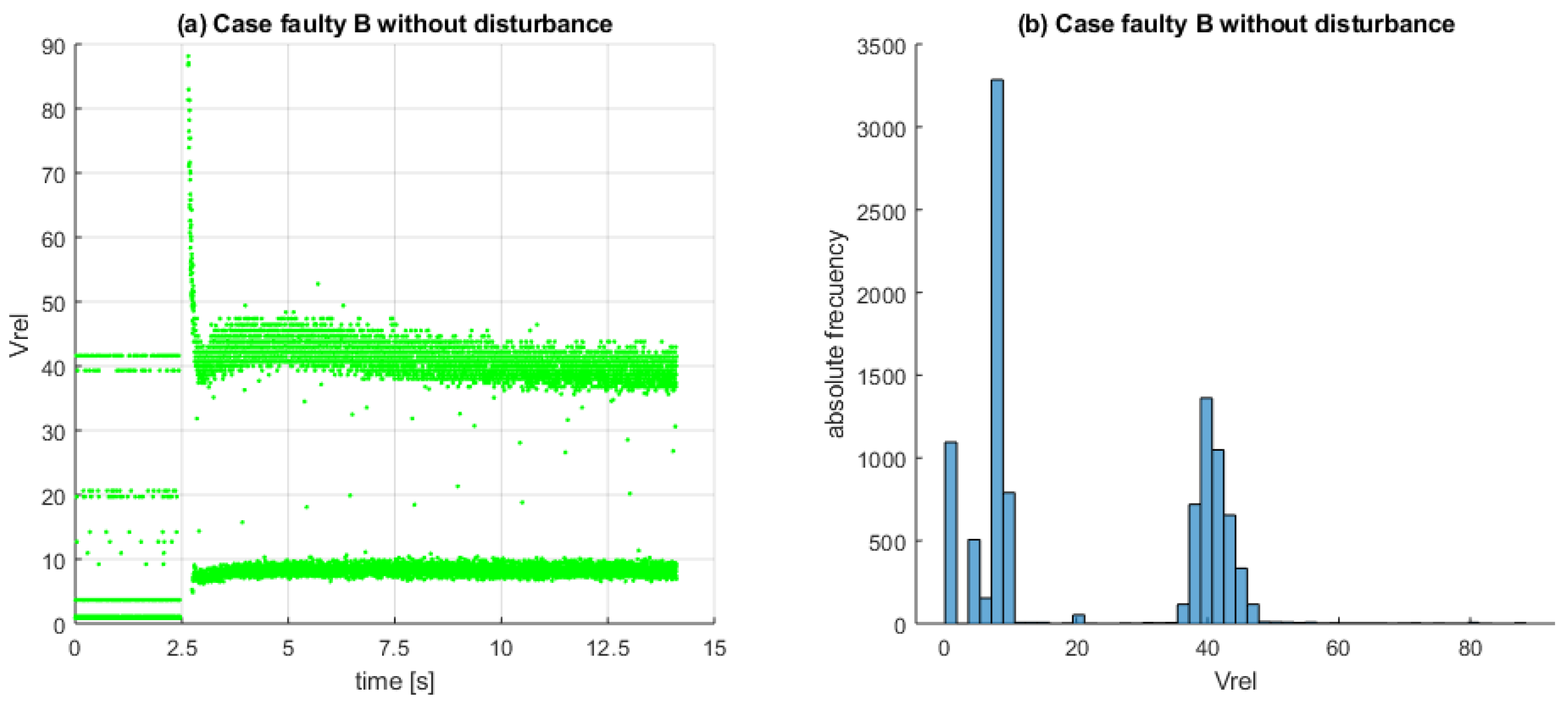
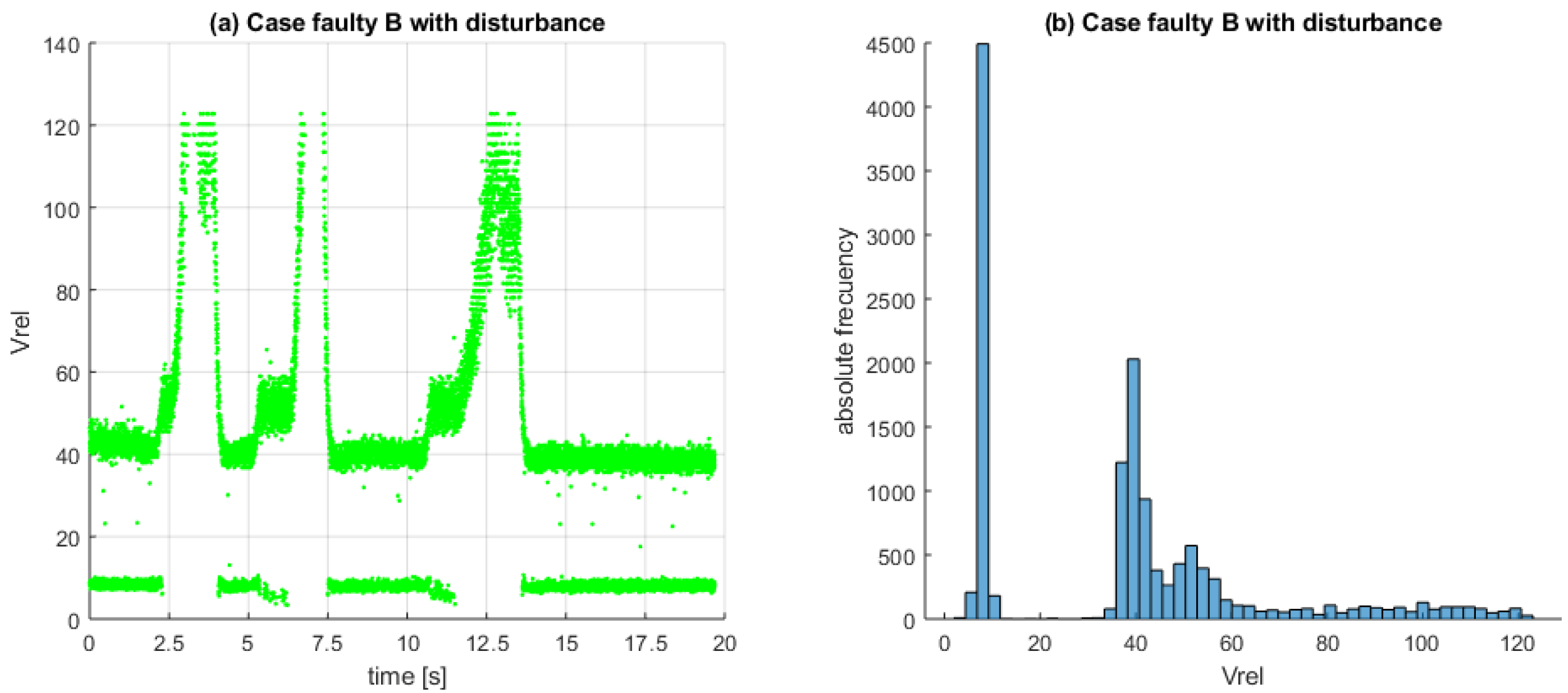
6. Experimental Results for the Faulty Car Battery Emulator Setup
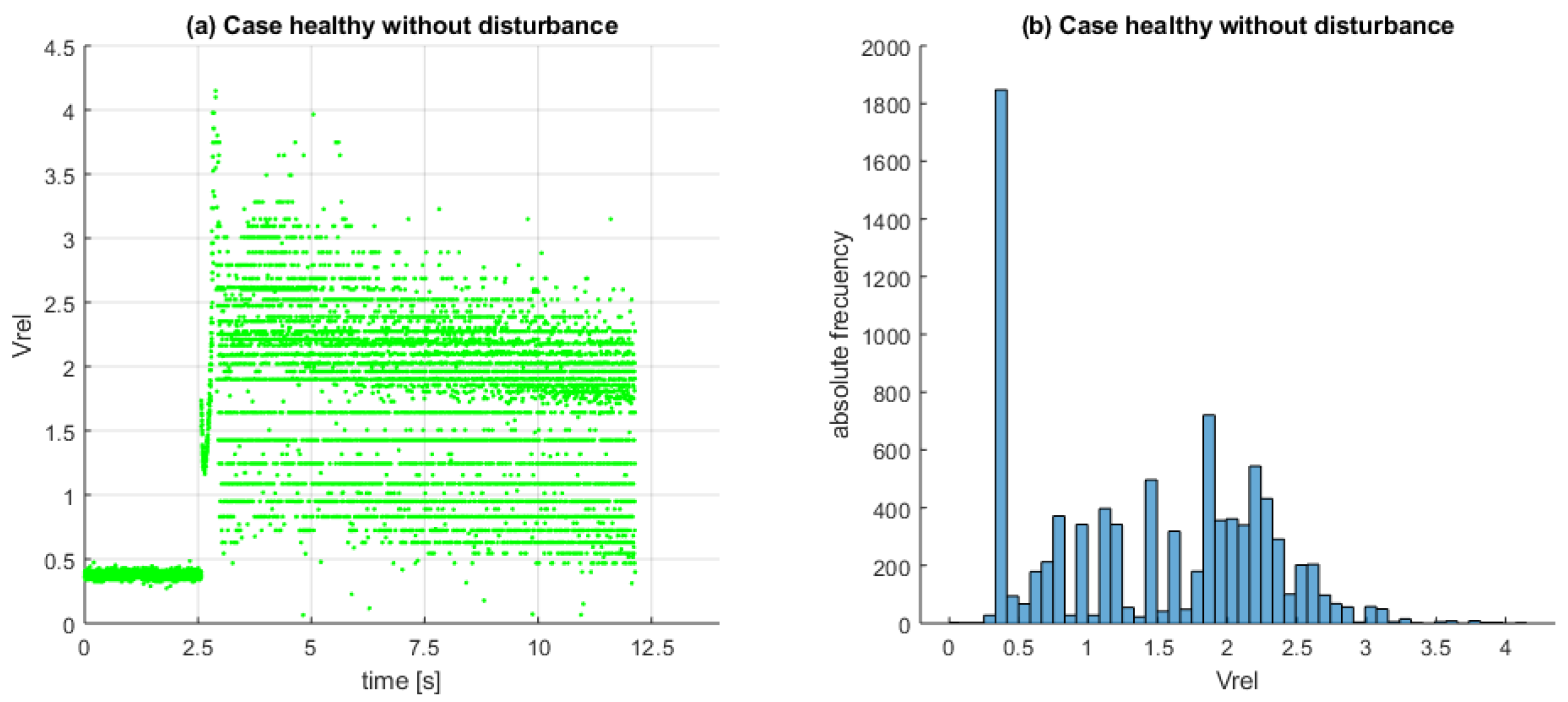
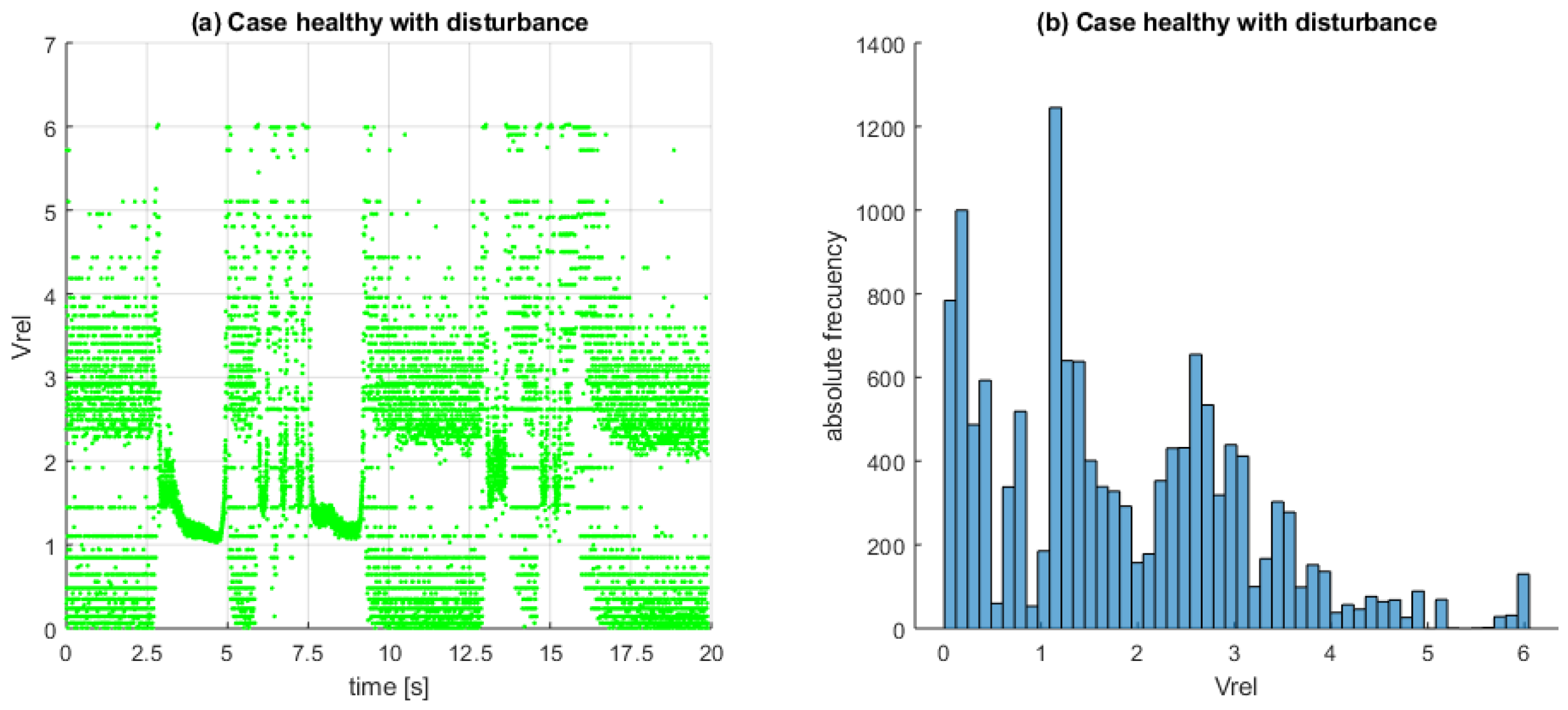
- Healthy case: M ;
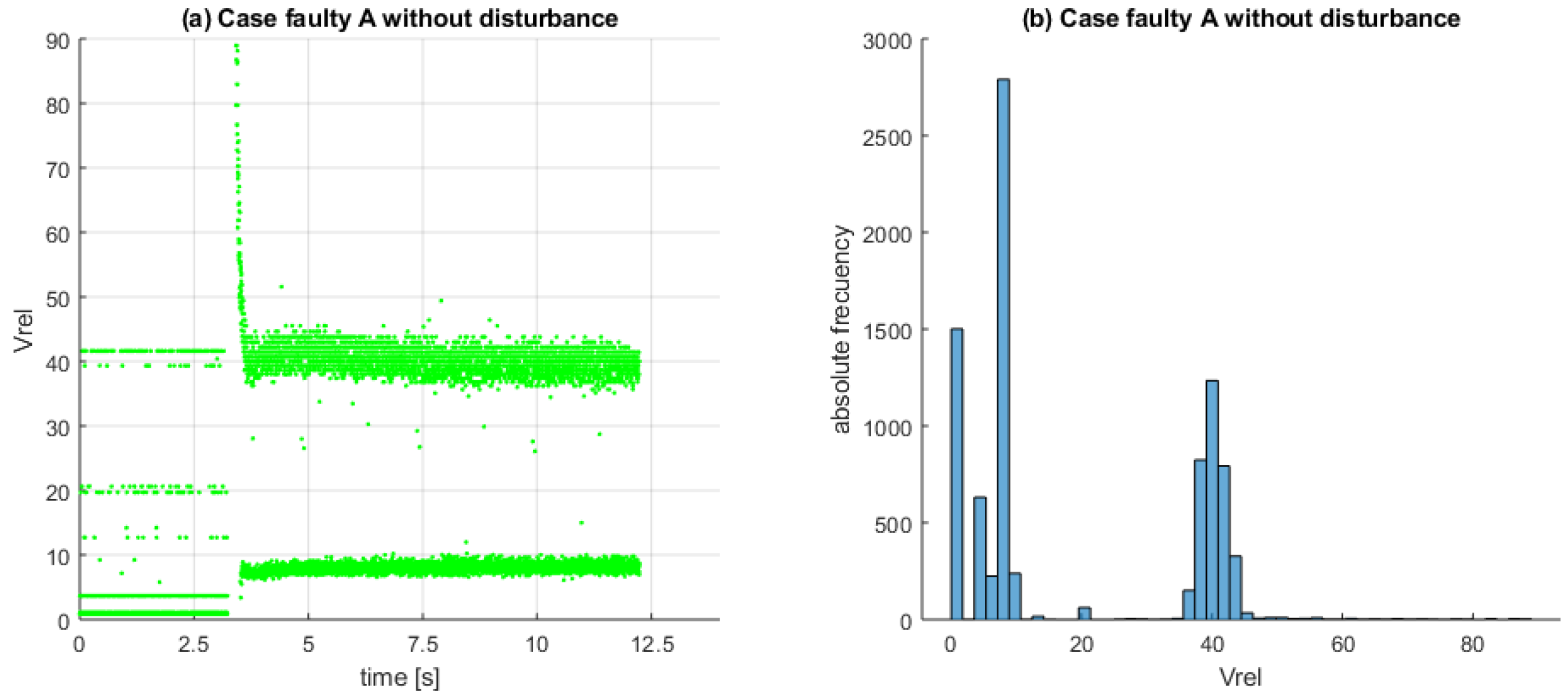
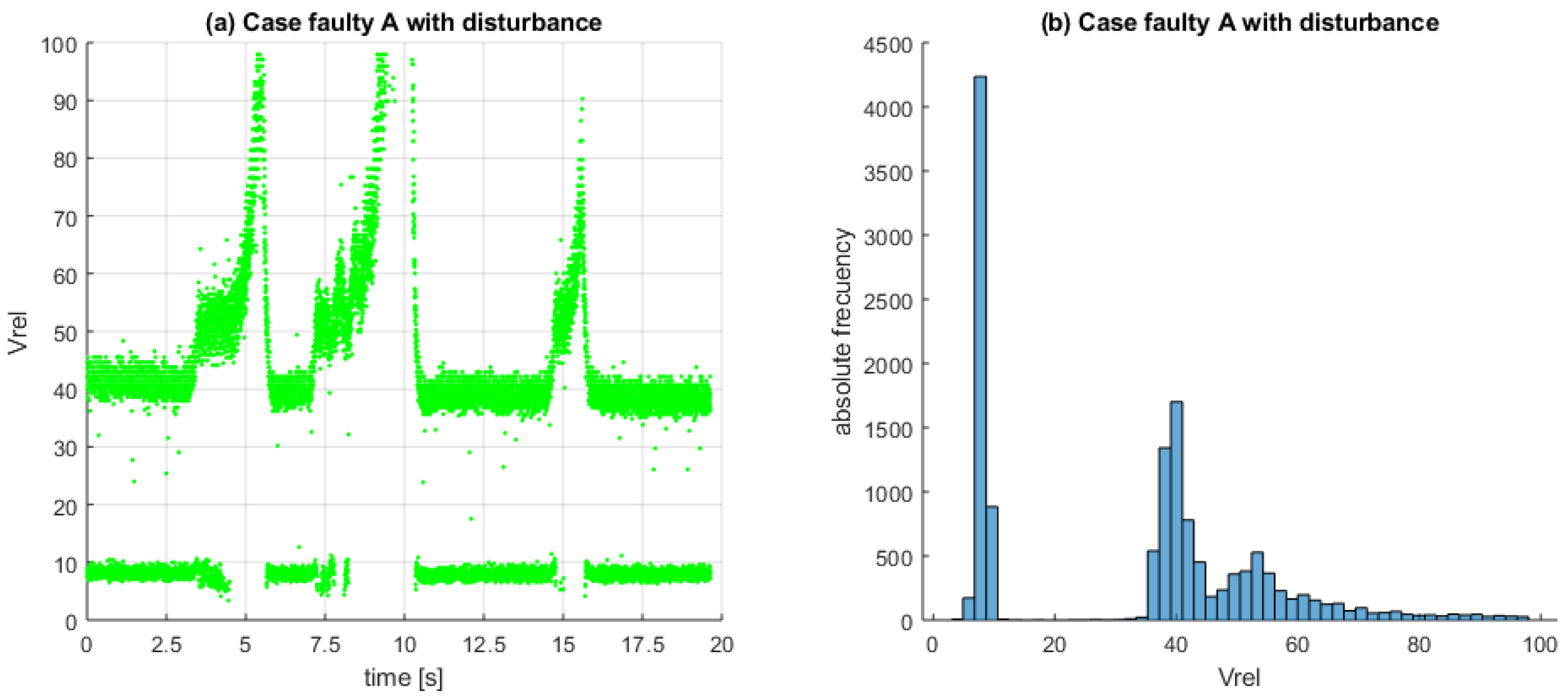
- Faulty case A: K ;
- Faulty case B: K .
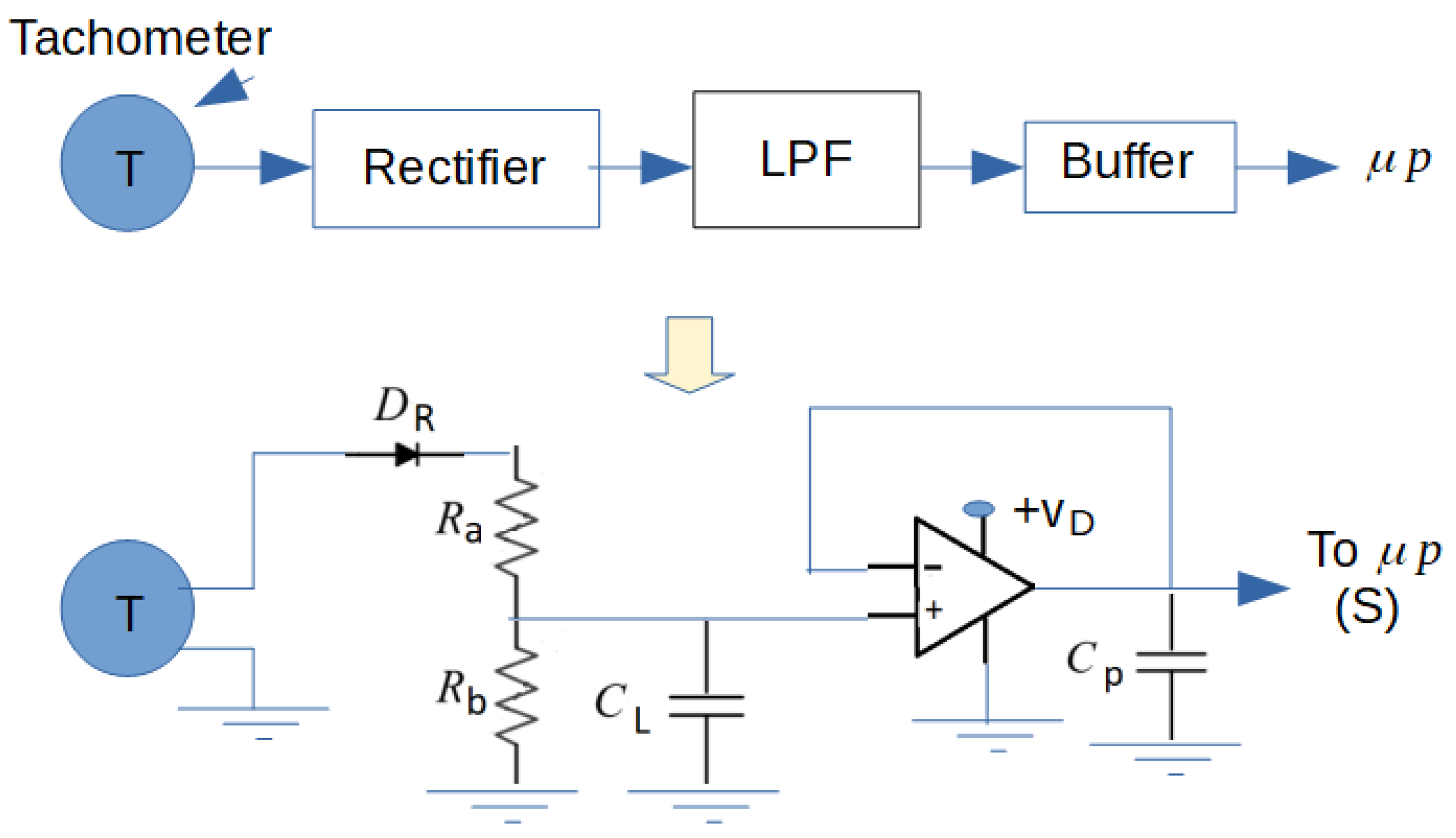
- The motor speed sensor can be improved by using encoders or potentiometers. These sensors are more accurate in measuring the motor speed.
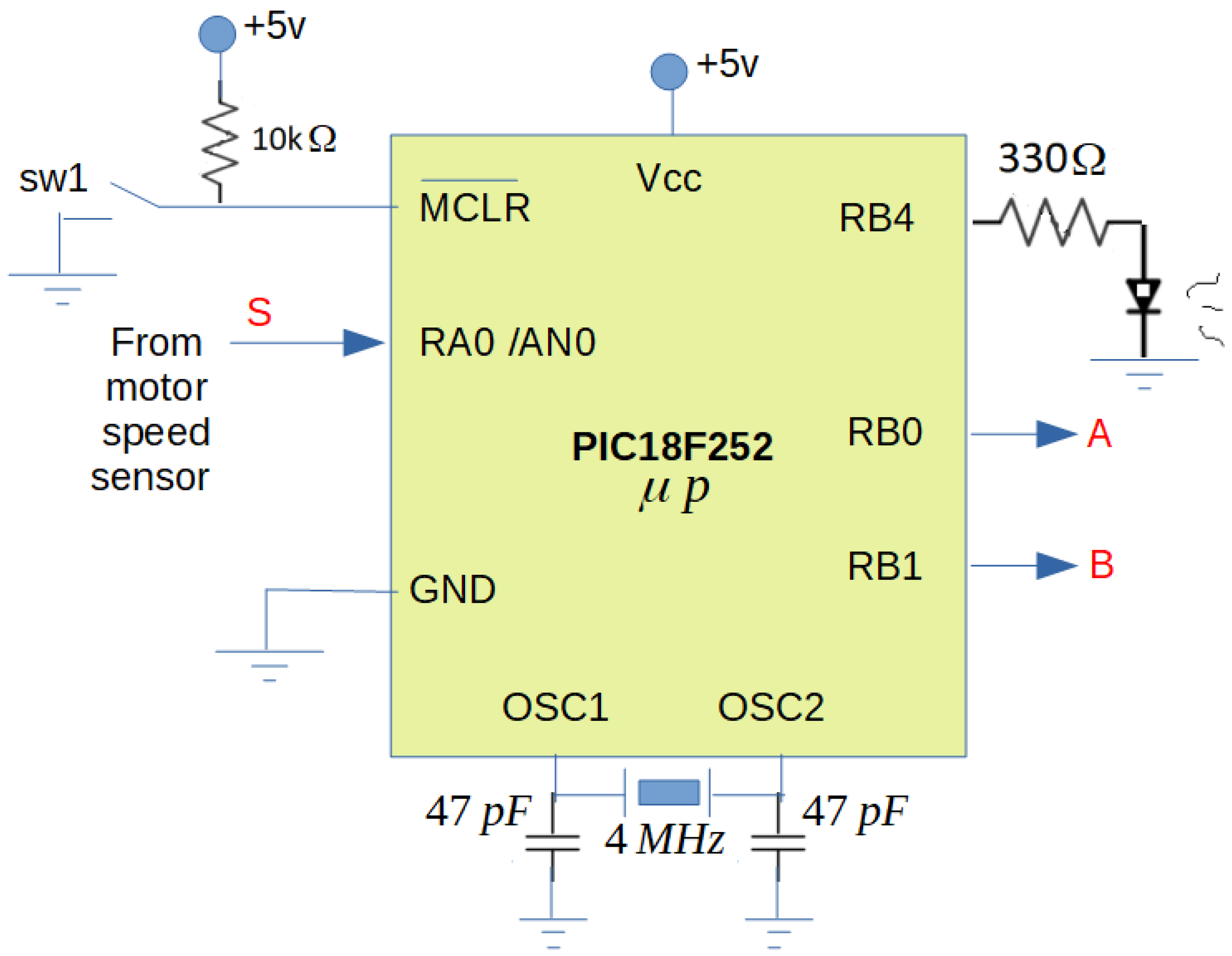
- NPN power transistors can be replaced by their equivalent MOSFET parts. These are more applicable from a power electronics point of view.
- Change the circuit into a printed circuit.
7. Battery Diagnoses System Design
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| DC | Direct Current |
| PID | Proportional Integral Derivative |
Appendix A

References
- Imran, O.A.; Abed, W.N.A.D.; Jbarah, A.N. Speed control of universal motor. Int. J. Power Electron. Drive Syst. 2019, 10, 41–47. [Google Scholar] [CrossRef]
- Ramadan, E.A.; El-Bardini, M.; Fkirin, M.A. Design and FPGA-implementation of an improved adaptive fuzzy logic controller for DC motor speed control. Ain Shams Eng. J. 2014, 5, 803–816. [Google Scholar] [CrossRef]
- Alexandridis, A.T.; Konstantopoulos, G.C. Modified PI speed controllers for series-excited dc motors fed by dc/dc boost converters. Control Eng. Pract. 2014, 23, 14–21. [Google Scholar] [CrossRef]
- Zeghoudi, A.; Chermitti, A. A comparison between a Fuzzy and PID controller for universal motor. Int. J. Comput. Appl. Technol. 2014, 104, 32–36. [Google Scholar] [CrossRef]
- Maheswararao, C.U.; Babu, Y.K.; Amaresh, K. Sliding mode speed control of a DC motor. In Proceedings of the International Conference on Communication Systems and Network Technologies (IEEE-CSNT), Jammu, India, 3–5 June 2011; pp. 387–391. [Google Scholar]
- Takano, M.; Kurotani, K.; Takeda, K.; Tanisaka, A.; Kusumoto, S.; Yano, K. Application of h infinity control to motor speed control system. In Proceedings of the International Conference on Industrial Electronics, Control and Instrumentation (IECON’91), Kobe, Japan, 28 October–1 November 1991. [Google Scholar]
- Roy, T.K.; Paul, L.C.; Sarkar, M.I.; Pervej, M.F.; Tumpa, F.K. Adaptive controller design for speed control of DC motors driven by a DC-DC buck converter. In Proceedings of the International Conference on Electrical, Computer and Communication Engineering (IEEE-ECCE), Cox’s Bazar, Bangladesh, 16–18 February 2017. [Google Scholar]
- Sun, L.; You, F. Machine Learning and Data-Driven Techniques for the Control of Smart Power Generation Systems: An Uncertainty Handling Perspective. Engineering 2021, 7, 1239–1247. [Google Scholar] [CrossRef]
- De León Puig, N.I.P.; Bozalakov, D.; Acho, L.; Vandevelde, L.; Rodellar, J. An Adaptive–Predictive control scheme with dynamic Hysteresis Modulation applied to a DC–DC buck converter. ISA Trans. 2020, 105, 240–255. [Google Scholar] [CrossRef]
- Madhusudan, K.S.A.P.J.; Parikh, P.A. Design and Development of Universal Motor Control Unit using MATLAB and Arduino. In Proceedings of the National Conference on Emerging Trends, Challenges and Opportunities in Power Sector, Ahmedabad, India, 3–4 March 2017. [Google Scholar]
- Elkady, D.A.; Azazy, H.Z.; Mansour, A.S.; Shokrallah, S.S. Adaptive PI Speed controller for a universal motor. Engin. Res. J. 2015, 38, 101–108. [Google Scholar] [CrossRef]
- Hamza, B.A.; Lilia, E.A. Simulation and rapid control prototyping of DC powered universal motors speed control: Towards an efficient operation in future DC homes. Eng. Sci. Technol. Int. J. 2022, 34, 101092. [Google Scholar]
- El-Nagar, A.M.; El-Bardini, M. Practical implementation for the interval type-2 fuzzy PID controller using a low cost microcontroller. Ain Shams Eng. J. 2014, 5, 475–487. [Google Scholar] [CrossRef]
- Rojas-Dueñas, G.; Riba, J.R.; Moreno-Eguilaz, M. Modeling of a DC-DC bidirectional converter used in mild hybrid electric vehicles from measurements. Measurement 2021, 183, 109838. [Google Scholar] [CrossRef]
- Yang, J.; Cheng, F.; Duodu, M.; Li, M.; Han, C. High-Precision Fault Detection for Electric Vehicle Battery System Based on Bayesian Optimization SVDD. Energies 2022, 15, 8331. [Google Scholar] [CrossRef]
- Mendoza-Torres, A.; Visairo, N.; Nuñez, C.; Armenta, J.; Rodríguez, E.; Cervantes, I. Switching rule for a bidirectional DC/DC converter in an electric vehicle. Control Eng. Pract. 2019, 82, 108–117. [Google Scholar] [CrossRef]
- Viswanatha, V. Microcontroller based bidirectional buck-boost converter for photo-voltaic power plant. J. Electr. Syst. Inf. Technol. 2018, 5, 745–758. [Google Scholar]
- Rashid, M.H. Power Electronics: Circuits, Devices, and Applications, 3rd ed.; Pearson Education: Hoboken, NJ, USA, 2009; pp. 289–292. [Google Scholar]
- De Souza, A.D.R.; Efimov, D.; Raïssi, T.; Ping, X. Robust output feedback model predictive control for constrained linear systems via interval observers. Automatica 2022, 135, 109951. [Google Scholar] [CrossRef]
- Zhang, P. Advanced Industrial Control Technology; William Andrew Publishing: Oxford, UK, 2010; Chapter 2; pp. 41–70. [Google Scholar]
- Elmorshedy, M.F.; Xu, W.; El-Sousy, F.F.M.; Islam, M.R.; Ahmed, A.A. Recent Achievements in Model Predictive Control Techniques for Industrial Motor: A Comprehensive State-of-the-Art. IEEE Access 2021, 9, 58170–58191. [Google Scholar] [CrossRef]
- Wenliang, J.; Xudong, W.; Kai, Z.; Lihua, L. The Minimum Cost Current Predictive Control Strategy for Three-Phase Inverter. In Proceedings of the International Symposium on Computer, Consumer and Control (IEE-IS3C), Xi’an, China, 4–6 July 2016. [Google Scholar]
- Bernardi, E.; Adam, E.J. Fault-tolerant predictive control based on linear parameter varying scheme for industrial processes. J. Taiwan Inst. Chem. Eng. 2021, 129, 1–14. [Google Scholar] [CrossRef]
- Cai, M.; He, X.; Zhou, D. Fault-tolerant tracking control for nonlinear observer-extended high-order fully-actuated systems. J. Frankl. Inst. 2023, 360, 136–153. [Google Scholar] [CrossRef]
- Gibergans-Báguena, J.; Buenestado, P.; Pujol-Vázquez, G.; Acho, L. A Proportional Digital Controller to Monitor Load Variation in Wind Turbine Systems. Energies 2022, 15, 568. [Google Scholar] [CrossRef]
- Yin, H.; Wang, Z.; Liu, P.; Zhang, Z.; Li, Y. Voltage fault diagnosis of power batteries based on boxplots and gini impurity for electric vehicles. In Proceedings of the IEEE Electric Vehicles International Conference (EV), Bucharest, Romania, 3–4 October 2019; pp. 1–5. [Google Scholar]
- Ablay, G. An observer-based fault diagnosis in battery systems of hybrid vehicles. In Proceedings of the 8th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 28–30 November 2013; pp. 238–242. [Google Scholar]
- Wang, Z.; Hong, J.; Liu, P.; Zhang, L. Voltage fault diagnosis and prognosis of battery systems based on entropy and Z-score for electric vehicles. Appl. Energy 2017, 196, 289–302. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, P.; Wang, Z. Real-time fault diagnosis method of battery system based on Shannon entropy. Energy Procedia 2017, 105, 2354–2359. [Google Scholar] [CrossRef]
- Shen, J.; Khaligh, A. Design and real-time controller implementation for a battery-ultracapacitor hybrid energy storage system. IEEE Trans. Ind. Inform. 2016, 12, 1910–1918. [Google Scholar] [CrossRef]
- Xu, G.; Du, X.; Li, Z.; Zhang, X.; Zheng, M.; Miao, Y.; Gao, Y.; Liu, Q. Reliability design of battery management system for power battery. Microelectron. Reliab. 2018, 88, 1286–1292. [Google Scholar] [CrossRef]
- Cheng, M.W.; Wang, S.M.; Lee, Y.S.; Hsiao, S.H. Fuzzy controlled fast charging system for lithium-ion batteries. In Proceedings of the International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 1498–1503. [Google Scholar]
- Bansal, U.K.; Narvey, R. Speed control of DC motor using fuzzy PID controller. Adv. Electron. Electr. Eng. 2013, 3, 1209–1220. [Google Scholar]
- Petráš, I. Fractional-order feedback control of a DC motor. J. Electr. Eng. 2009, 60, 117–128. [Google Scholar]
- Santana, J.; Naredo, J.L.; Sandoval, F.; Grout, I.; Argueta, O.J. Simulation and construction of a speed control for a DC series motor. Mechatronics 2002, 12, 1145–1156. [Google Scholar] [CrossRef]
- Zhao, D.; Zhang, N. An improved nonlinear speed controller for series DC motors. In Proceedings of the of the 17th World Congress, The International Federation of Automatic Control, Seoul, Republic of Korea, 6–11 July 2008. [Google Scholar]
- Ponce De León Puig, N.I.; Rodellar, J.; Acho, L. Predictive Control with Dynamic Hysteresis Reference Trajectory: Application to a Structural Base-Isolation Model. J. Appl. Comput. Mech. 2021, 7, 1242–1251. [Google Scholar] [CrossRef]
- Maiciejowski, J.M. Predictive Control with Constraints; Prentice Hall: New York, NY, USA, 2002. [Google Scholar]
- Norambuena, M.; Lezana, P.; Rodriguez, J. A method to eliminate steady-state error of model predictive control in power electronics. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2525–2530. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.; Propp, K.; Longo, S.; Wild, M. A review on electric vehicle battery modelling: From Lithium-ion toward Lithium–Sulphur. Renew. Sustain. Energy Rev. 2016, 56, 1008–1021. [Google Scholar] [CrossRef]
- Sun, Z.; Han, Y.; Wang, Z.; Chen, Y.; Liu, P.; Qin, Z.; Zhang, Z.; Wu, Z.; Song, C. Detection of voltage fault in the battery system of electric vehicles using statistical analysis. Appl. Energy 2021, 307, 118172. [Google Scholar] [CrossRef]
- Li, S.; Zhang, C.; Du, J.; Cong, X.; Zhang, L.; Jiang, Y.; Wang, L. Fault diagnosis for lithium-ion batteries in electric vehicles based on signal decomposition and two-dimensional feature clustering. Green Energy Intell. Transp. 2022, 1, 100009. [Google Scholar] [CrossRef]
- Wu, M.; Du, W.; Zhang, F.; Zhao, N.; Wang, J.; Wang, L.; Huang, W. Fault Diagnosis Method for Lithium-Ion Battery Packs in Real-World Electric Vehicles Based on K-Means and the Fréchet Algorithm. ACS Omega 2022, 7, 40145–40162. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Z.; Liu, P.; Wang, Z.; Zhang, L. Fault Diagnosis of Battery Systems for Electric Vehicles Based on Voltage Abnormality Combining the Long Short-term Memory Neural Network and the Equivalent Circuit Model. IEEE Trans. Power Electron. 2021, 36, 1303–1315. [Google Scholar] [CrossRef]
- Qiu, Y.; Sun, J.; Shang, Y.; Wang, D.A. Fault Diagnosis and Prognosis Method for Lithium-Ion Batteries Based on a Nonlinear Autoregressive Exogenous Neural Network and Boxplot. Symmetry 2021, 13, 1714. [Google Scholar] [CrossRef]






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buenestado, P.; Gibergans-Báguena, J.; Acho, L.; Pujol-Vázquez, G. Predictive Speed Control of a DC Universal Motor Applied to Monitor Electric Vehicle Batteries. Machines 2023, 11, 740. https://doi.org/10.3390/machines11070740
Buenestado P, Gibergans-Báguena J, Acho L, Pujol-Vázquez G. Predictive Speed Control of a DC Universal Motor Applied to Monitor Electric Vehicle Batteries. Machines. 2023; 11(7):740. https://doi.org/10.3390/machines11070740
Chicago/Turabian StyleBuenestado, Pablo, José Gibergans-Báguena, Leonardo Acho, and Gisela Pujol-Vázquez. 2023. "Predictive Speed Control of a DC Universal Motor Applied to Monitor Electric Vehicle Batteries" Machines 11, no. 7: 740. https://doi.org/10.3390/machines11070740
APA StyleBuenestado, P., Gibergans-Báguena, J., Acho, L., & Pujol-Vázquez, G. (2023). Predictive Speed Control of a DC Universal Motor Applied to Monitor Electric Vehicle Batteries. Machines, 11(7), 740. https://doi.org/10.3390/machines11070740