
Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle

 ,
,  ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
3. Results and Discussions
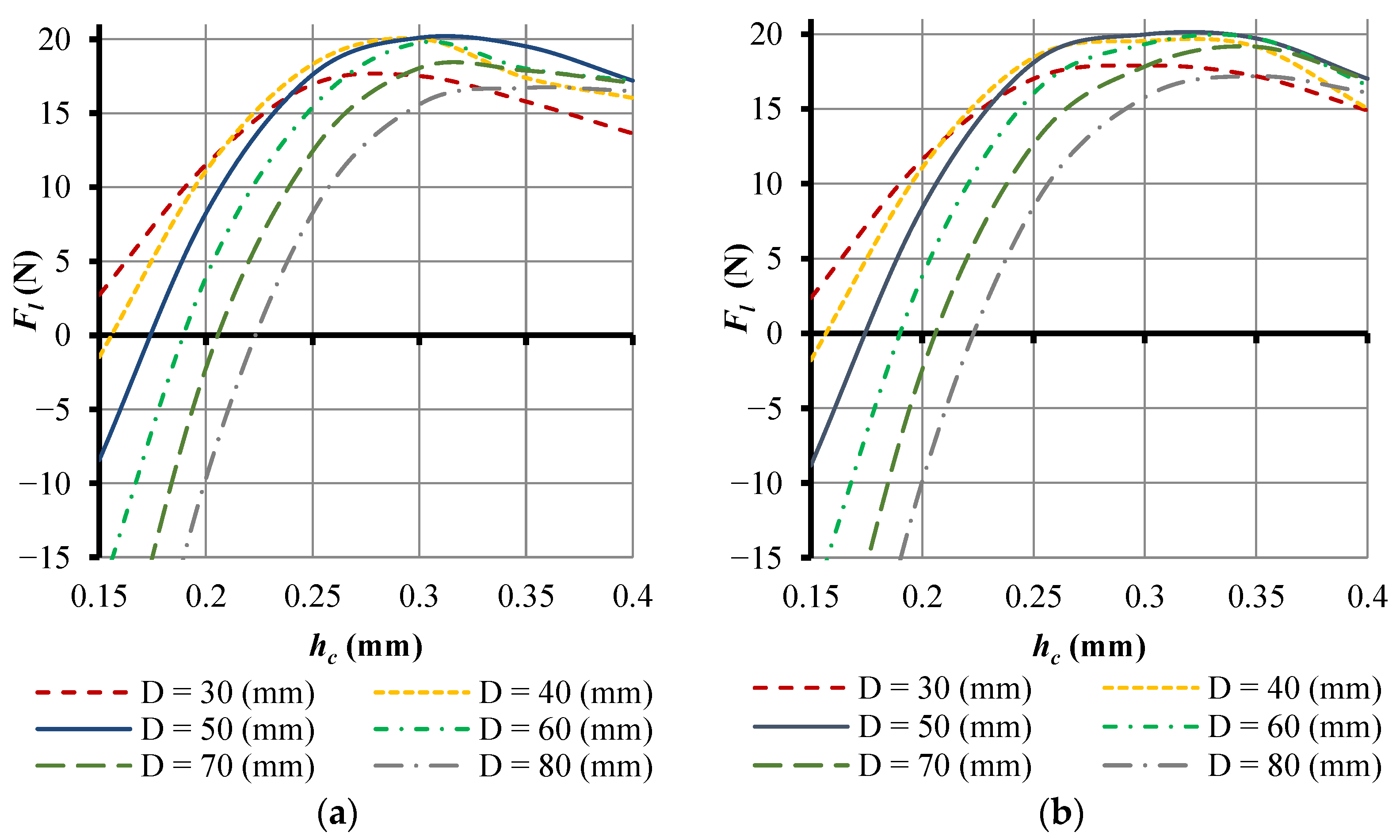
- In the nozzle area, as the height of the gap increases, the resistance with which the air comes into contact when it enters the gap decreases, as does the speed of air movement. Therefore, the pressure in front of the nozzle decreases with increasing gap height;
- In the area of supersonic air velocity, increasing the height of the gap reduces the effect of narrowing the airflow, which in turn reduces the inertial effect and the effect of viscous friction. This leads to the fact that as the gap increases, the vacuum increases, but the vacuum zone decreases.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chan, F.T.S.; Ip, R.W.L.; Lau, H. Integration of expert system with analytic hierarchy process for the design of material handling equipment selection system. J. Mater. Process. Technol. 2001, 116, 137–145. [Google Scholar] [CrossRef]
- Ceccarelli, M. Fundamentals of the mechanics of robots. In Fundamentals of Mechanics of Robotic Manipulation; Springer: Dordrecht, The Netherlands, 2004; pp. 73–240. [Google Scholar] [CrossRef]
- Shameli, E.; Khamesee, M.B.; Huissoon, J.P. Nonlinear controller design for a magnetic levitation device. Microsyst. Technol. 2007, 13, 831–835. [Google Scholar] [CrossRef]
- Henrich, D.; Wörn, H. Robot Manipulation of Deformable Objects; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar] [CrossRef]
- Fantoni, G.; Santochi, M.; Dini, G.; Tracht, K.; Scholz-Reiter, B.; Fleischer, J.; Hansen, H.N. Grasping devices and methods in automated production processes. CIRP Ann. 2014, 63, 679–701. [Google Scholar] [CrossRef]
- Fantoni, G.; Capiferri, S.; Tilli, J. Method for supporting the selection of robot grippers. Procedia CIRP 2014, 21, 330–335. [Google Scholar] [CrossRef]
- Li, X.; Kagawa, T. Development of a new noncontact gripper using swirl vanes. Robot. Comput.-Integr. Manuf. 2013, 29, 63–70. [Google Scholar] [CrossRef]
- Ozcelik, B.; Erzincanli, F.; Findik, F. Evaluation of handling results of various materials using a non-contact end-effector. Ind. Robot Int. J. 2003, 30, 363–369. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Fendo, O. Justification of design and parameters of Bernoulli–vacuum gripping device. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417741740. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F. Gasdynamic analysis of the Bernoulli grippers interaction with the surface of flat objects with displacement of the center of mass. Vacuum 2019, 159, 524–533. [Google Scholar] [CrossRef]
- Official Website of Festo AG & Co, Bernoulli Gripper OGGB. Available online: https://www.festo.com/se/en/p/bernoulli-grippers-id_OGGB/?page=0 (accessed on 23 March 2023).
- Official Website of SMC. Available online: https://www.smcworld.com/webcatalog/en-jp/categoryID/1036?ca_id=1036 (accessed on 23 March 2023).
- Official Website of Emerson. Non-Contact Transport System. Available online: https://www.emerson.com/en-us/catalog/automation-solutions/fluid-control-pneumatics/vacuum-technologies? (accessed on 23 March 2023).
- Official Website of Schmalz; Schmalz, J. Floating Suction Cups SBS, Special Grippers. Available online: https://www.schmalz.com/en/vacuum-technology-for-automation/vacuum-components/special-grippers/floating-suction-cups/floating-suction-cups-sbs (accessed on 23 March 2023).
- Mykhailyshyn, R.; Savkiv, V.; Maruschak, P.; Xiao, J. A systematic review on pneumatic gripping devices for industrial robots. Transport 2022, 37, 201–231. [Google Scholar] [CrossRef]
- Konishcheva, O.V.; Briukhovetskaia, E.V.; Brungardt, M.V.; Shhepin, A.N.; Kudrjavcev, I.V. Study of a swirling gas jet emanated from a vortex jet gripper onto a plain barrier. J. Phys. Conf. Ser. 2020, 1515, 042037. [Google Scholar] [CrossRef]
- Konischeva, O.V.; Bruhoveckaya, E.V.; Kudryavtsev, I.V. Effect of Design Features of Vortex Jet Grippers on Their Load Capacity. In Proceedings of the 6th International Conference on Industrial Engineering (ICIE 2020), Sochi, Russia, 17–21 May 2020; pp. 213–218. [Google Scholar] [CrossRef]
- Stühm, K.; Tornow, A.; Schmitt, J.; Grunau, L.; Dietrich, F.; Dröder, K. A novel gripper for battery electrodes based on the Bernoulli-principle with integrated exhaust air compensation. Procedia CIRP 2014, 23, 161–164. [Google Scholar] [CrossRef][Green Version]
- Tanaka, Y.; Suzuki, R.; Edamura, K.; Yokota, S. Design and Fabrication of Micro Gripper Using Functional Fluid Power. Int. J. Autom. Technol. 2022, 16, 448–455. [Google Scholar] [CrossRef]
- Liu, D.; Liang, W.; Zhu, H.; Teo, C.S.; Tan, K.K. Development of a distributed Bernoulli gripper for ultra-thin wafer handling. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 265–270. [Google Scholar] [CrossRef]
- Welanetz, L.F.; Syosset, N.Y. A suction device using air under pressure. J. Appl. Mech. Trans. Am. Soc. Mech. Eng. 1956, 78, 269. [Google Scholar] [CrossRef]
- Brun, X.F.; Melkote, S.N. Analysis of stresses and breakage of crystalline silicon wafers during handling and transport. Sol. Energy Mater. Sol. Cells 2009, 93, 1238–1247. [Google Scholar] [CrossRef]
- Brun, X.F.; Melkote, S.N. Modeling and prediction of the flow, pressure, and holding force generated by a Bernoulli handling device. J. Manuf. Sci. Eng. 2009, 131, 031018. [Google Scholar] [CrossRef]
- Brun, X.; Melkote, S.N. Effect of substrate flexibility on the pressure distribution and lifting force generated by a Bernoulli gripper. J. Manuf. Sci. Eng. 2012, 134, 051010. [Google Scholar] [CrossRef]
- Liu, D.; Teo, C.S.; Liang, W.; Tan, K.K. Soft-acting, noncontact gripping method for ultrathin wafers using distributed Bernoulli principle. IEEE Trans. Autom. Sci. Eng. 2018, 16, 668–677. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y.; Mei, D.; Dai, S. Development of an Annular-Shaped Bernoulli Gripper for Contactless Gripping of Large-Size Silicon Wafer. In Proceedings of the 2021 IEEE 16th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xiamen, China, 25–29 April 2021; pp. 1871–1876. [Google Scholar] [CrossRef]
- Giesen, T.; Bürk, E.; Fischmann, C.; Gauchel, W.; Zindl, M.; Verl, A. Advanced gripper development and tests for automated photovoltaic wafer handling. Assem. Autom. 2013, 33, 334–344. [Google Scholar] [CrossRef]
- Mykhailyshyn, R.; Savkiv, V.; Boyko, I.; Prada, E.; Virgala, I. Substantiation of Parameters of Friction Elements of Bernoulli Grippers with a Cylindrical Nozzle. Int. J. Manuf. Mater. Mech. Eng. (IJMMME) 2021, 11, 17–39. [Google Scholar] [CrossRef]
- Li, X.; Kagawa, T. Theoretical and experimental study of factors affecting the suction force of a Bernoulli gripper. J. Eng. Mech. 2014, 140, 04014066. [Google Scholar] [CrossRef]
- Ozcelik, B.; Erzincanli, F. A non-contact end-effector for the handling of garments. Robotica 2002, 20, 447–450. [Google Scholar] [CrossRef]
- Dini, G.; Fantoni, G.; Failli, F. Grasping leather plies by Bernoulli grippers. CIRP Ann. 2009, 58, 21–24. [Google Scholar] [CrossRef]
- Failli, F.; Dini, G. An innovative approach to the automated stacking and grasping of leather plies. CIRP Ann. 2004, 53, 31–34. [Google Scholar] [CrossRef]
- Erzincanli, F.; Sharp, J.M.; Erhal, S. Design and operational considerations of a non-contact robotic handling system for non-rigid materials. Int. J. Mach. Tools Manuf. 1998, 38, 353–361. [Google Scholar] [CrossRef]
- Davis, S.; Gray, J.O.; Caldwell, D.G. An end effector based on the Bernoulli principle for handling sliced fruit and vegetables. Robot. Comput.-Integr. Manuf. 2008, 24, 249–257. [Google Scholar] [CrossRef]
- Petterson, A.; Ohlsson, T.; Caldwell, D.G.; Davis, S.; Gray, J.O.; Dodd, T.J. A Bernoulli principle gripper for handling of planar and 3D (food) products. Ind. Robot Int. J. 2010, 37, 518–526. [Google Scholar] [CrossRef]
- Diahovchenko, I.; Mykhailyshyn, R.; Danylchenko, D.; Shevchenko, S. Rogowsky coil applications for power measurement under non-sinusoidal field conditions. Energetika 2019, 65, 14–20. [Google Scholar] [CrossRef]
- Mykhailyshyn, R.; Savkiv, V.; Fey, A.M.; Xiao, J. Gripping Device for Textile Materials. IEEE Trans. Autom. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- McIlwraith, L.; Christie, A. Contactless Handling of Objects. U.S. Patent 6,601,888, 5 August 2003. [Google Scholar]
- Shi, K.; Li, X. Experimental and theoretical study of dynamic characteristics of Bernoulli gripper. Precis. Eng. 2018, 52, 323–331. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Fendo, O.; Mykhailyshyn, M. Orientation modeling of Bernoulli gripper device with off-centered masses of the manipulating object. Procedia Eng. 2017, 187, 264–271. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Mikhalishin, M. Modeling of Bernoulli gripping device orientation when manipulating objects along the arc. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418762670. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Maruschak, P.; Kyrylovych, V.; Duchon, F.; Chovanec, Ľ. Gripping devices of industrial robots for manipulating offset dish antenna billets and controlling their shape. Transport 2021, 36, 63–74. [Google Scholar] [CrossRef]
- Mykhailyshyn, R.; Xiao, J. Influence of inlet parameters on power characteristics of Bernoulli gripping devices for industrial robots. Appl. Sci. 2022, 12, 7074. [Google Scholar] [CrossRef]
- Mykhailyshyn, R.; Duchoň, F.; Mykhailyshyn, M.; Majewicz Fey, A. Three-Dimensional Printing of Cylindrical Nozzle Elements of Bernoulli Gripping Devices for Industrial Robots. Robotics 2022, 11, 140. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Mikhalishin, M. Energy efficiency analysis of the manipulation process by the industrial objects with the use of Bernoulli gripping devices. J. Electr. Eng. 2017, 68, 496–502. [Google Scholar] [CrossRef][Green Version]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Maruschak, P.; Prentkovskis, O. Substantiation of Bernoulli grippers parameters at non-contact transportation of objects with a displaced center of mass. In Transport Means 2018: Proceedings of the 22nd International Scientific Conference, Trakai, Lithuania, 3–5 October 2018; Kaunas University of Technology: Kaunas, Lithuania, 2018; pp. 3–5. [Google Scholar]
- Liu, H.; Li, X.; Ma, Q.; Feng, W. Development non-contact gripper with flowrate-amplification using Coanda ejector. Vacuum 2021, 187, 110108. [Google Scholar] [CrossRef]
- Zhang, W.; Hong, J.; Ahmed, S.; Ounaies, Z.; Frecker, M. A Two-Stage Optimization Procedure for the Design of an EAP-Actuated Soft Gripper. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019; Volume 59247, p. V05BT07A051. [Google Scholar] [CrossRef]
- Stupin, S.A.; Ogorodnikova, O.M. Topology optimization in designing of anthropomorphic gripper for a robot. In Proceedings of the AIP Conference Proceedings, Ekaterinburg, Russia, 18–22 May 2020; Volume 2313, p. 040011. [Google Scholar] [CrossRef]
- Sang, L.; Wang, H.; Tian, Y. Analysis, Design and Experimental Research of a Novel Bilateral Patient Transfer Robot. Machines 2022, 10, 33. [Google Scholar] [CrossRef]
- Li, P.; Yun, Z.; Gao, K.; Si, L.; Du, X. Design and Test of a Force Feedback Seedling Pick-Up Gripper for an Automatic Transplanter. Agriculture 2022, 12, 1889. [Google Scholar] [CrossRef]
- Ouyang, F.; Guan, Y.; Yu, C.; Yang, X.; Cheng, Q.; Chen, J.; Zhao, J.; Zhang, Q.; Guo, Y. An Optimization Design Method of Rigid-Flexible Soft Fingers Based on Dielectric Elastomer Actuators. Micromachines 2022, 13, 2030. [Google Scholar] [CrossRef]
- Stojiljković, D.; Milošević, M.; Ristić-Durrant, D.; Nikolić, V.; Pavlović, N.T.; Ćirić, I.; Ivačko, N. Simulation, Analysis, and Experimentation of the Compliant Finger as a Part of Hand-Compliant Mechanism Development. Appl. Sci. 2023, 13, 2490. [Google Scholar] [CrossRef]
- Batsuren, K.; Yun, D. Soft Robotic Gripper with Chambered Fingers for Performing In-Hand Manipulation. Appl. Sci. 2019, 9, 2967. [Google Scholar] [CrossRef]
- Bharanidaran, R.; Ramesh, T. A modified post-processing technique to design a compliant based microgripper with a plunger using topological optimization. Int. J. Adv. Manuf. Technol. 2017, 93, 103–112. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, C.; Zong, W.; Huang, X.; Ma, L.; Lian, G. Optimization of Clamping and Conveying Device for Sunflower Oil Combine Harvester Header. Agriculture 2021, 11, 859. [Google Scholar] [CrossRef]
- Li, Z.; Yao, S.; Yun, F.; Wang, X.; Wang, L.; Wu, Y. Simulation and Optimization of the Nozzle Section Geometry for a Suspension Abrasive Water Jet. Machines 2022, 10, 3. [Google Scholar] [CrossRef]
- Ma, L.; Yan, H.; Ren, Y.; Li, L.; Cai, C. Numerical Investigation of Flow Force and Cavitation Phenomenon in the Pilot Stage of Electrical-Hydraulic Servo Valve under Temperature Shock. Machines 2022, 10, 423. [Google Scholar] [CrossRef]
- Chen, L.; Cheng, M.; Cai, Y.; Guo, L.; Gao, D. Design and Optimization of High-Pressure Water Jet for Coal Breaking and Punching Nozzle Considering Structural Parameter Interaction. Machines 2022, 10, 60. [Google Scholar] [CrossRef]
- Wang, G.; Yang, Y.; Wang, C.; Shi, W.; Li, W.; Pan, B. Effect of Nozzle Outlet Shape on Cavitation Behavior of Submerged High-Pressure Jet. Machines 2022, 10, 4. [Google Scholar] [CrossRef]
- Kamensky, K.M.; Hellum, A.M.; Mukherjee, R. Power Scaling of Radial Outflow: Bernoulli Pads in Equilibrium. J. Fluids Eng. 2019, 141, 101201. [Google Scholar] [CrossRef]
- Shi, K.; Li, X. Optimization of outer diameter of Bernoulli gripper. Exp. Therm. Fluid Sci. 2016, 77, 284–294. [Google Scholar] [CrossRef]
- Liu, D.; Wang, M.; Fang, N.; Cong, M.; Du, Y. Design and tests of a non-contact Bernoulli gripper for rough-surfaced and fragile objects gripping. Assem. Autom. 2020, 40, 735–743. [Google Scholar] [CrossRef]
- Yu, X.; Zhao, J.; Li, X. Optimization of mechanical performance of a Bernoulli gripper based on the force characteristic curve synthesis method. Ind. Robot 2022, 49, 1169–1177. [Google Scholar] [CrossRef]
- Snegiryov, A.Y. High-Performance Computing in Technical Physics. In Numerical Simulation of Turbulent Flows; Polytechnic University Publ.: St. Petersburg, Russia, 2009. [Google Scholar]
- Cant, S. High-performance computing in computational fluid dynamics: Progress and challenges. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2002, 360, 1211–1225. [Google Scholar] [CrossRef]
- Amundson, J.; Macridin, A.; Spentzouris, P. High-Performance Computing Modeling Advances Accelerator Science for High-Energy Physics. Comput. Sci. Eng. 2014, 16, 32–41. [Google Scholar] [CrossRef]
- Alfonsi, G. On direct numerical simulation of turbulent flows. Appl. Mech. Rev. 2011, 64, 020802. [Google Scholar] [CrossRef]
- Kajishima, T.; Taira, K.; Kajishima, T.; Taira, K. Numerical simulation of turbulent flows. In Computational Fluid Dynamics: Incompressible Turbulent Flows; Springer: Cham, Switzerland, 2017; pp. 207–235. [Google Scholar] [CrossRef]
- Martell, M.B.; Perot, J.B.; Rothstein, J.P. Direct numerical simulations of turbulent flows over superhydrophobic surfaces. J. Fluid Mech. 2009, 620, 31–41. [Google Scholar] [CrossRef]
- Garbaruk, A.V. Modern Approaches to Modeling Turbulence; Polytechnic University Publ.: St. Petersburg, Russia, 2016. [Google Scholar]
- Malikov, Z.M.; Madaliev, M.E. Numerical Simulation of Turbulent Flows Based on Modern Turbulence Models. Comput. Math. Math. Phys. 2022, 62, 1707–1722. [Google Scholar] [CrossRef]
- Aubin, J.; Fletcher, D.F.; Xuereb, C. Modeling turbulent flow in stirred tanks with CFD: The influence of the modeling approach, turbulence model and numerical scheme. Exp. Therm. Fluid Sci. 2004, 28, 431–445. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Menter, F.R.; Smirnov, P.E.; Liu, T.; Avancha, R. A one-equation local correlation-based transition model. Flow Turbul. Combust. 2015, 95, 583–619. [Google Scholar] [CrossRef]
- Zhang, J.; Fu, S. An efficient approach for quantifying parameter uncertainty in the SST turbulence model. Comput. Fluids 2019, 181, 173–187. [Google Scholar] [CrossRef]
- Hu, P.; Li, Y.; Han, Y.; Cai, S.C.; Xu, X. Numerical simulations of the mean wind speeds and turbulence intensities over simplified gorges using the SST k-ω turbulence model. Eng. Appl. Comput. Fluid Mech. 2016, 10, 359–372. [Google Scholar] [CrossRef]
- Li, X.; Li, N.; Tao, G.; Liu, H.; Kagawa, T. Experimental comparison of Bernoulli gripper and vortex gripper. Int. J. Precis. Eng. Manuf. 2015, 16, 2081–2090. [Google Scholar] [CrossRef]
- Wagner, M.; Chen, X.; Nayyerloo, M.; Wang, W.; Chase, J.G. A novel wall climbing robot based on Bernoulli effect. In Proceedings of the 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 210–215. [Google Scholar] [CrossRef]
- Birglen, L.; Schlicht, T. A statistical review of industrial robotic grippers. Robot. Comput.-Integr. Manuf. 2018, 49, 88–97. [Google Scholar] [CrossRef]
- Wolf, A.; Schunk, H.A. Grippers in Motion: The Fascination of Automated Handling Tasks; Carl Hanser Verlag GmbH Co. KG: Munich, Germany, 2018. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mykhailyshyn, R.; Duchoň, F.; Virgala, I.; Sinčák, P.J.; Majewicz Fey, A. Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle. Machines 2023, 11, 667. https://doi.org/10.3390/machines11060667
Mykhailyshyn R, Duchoň F, Virgala I, Sinčák PJ, Majewicz Fey A. Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle. Machines. 2023; 11(6):667. https://doi.org/10.3390/machines11060667
Chicago/Turabian StyleMykhailyshyn, Roman, František Duchoň, Ivan Virgala, Peter Jan Sinčák, and Ann Majewicz Fey. 2023. "Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle" Machines 11, no. 6: 667. https://doi.org/10.3390/machines11060667
APA StyleMykhailyshyn, R., Duchoň, F., Virgala, I., Sinčák, P. J., & Majewicz Fey, A. (2023). Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle. Machines, 11(6), 667. https://doi.org/10.3390/machines11060667