


Humanitarian Demining Serial-Tracked Robot: Design and Dynamic Modeling


Abstract
1. Introduction
- Munitions and explosive devices research—refers to the gathering of information on discovered explosive munitions, namely recognition, which means classifying them into a category (grenade, bomb, projectile, or guided or unguided missile) and identifying that munition, which refers to the type of ammunition (thrown, released, propelled, or placed), its type and condition, for what purpose it was used, how it reached the target, the mechanism of operation and the method of initiation. This step can be performed by specialized EOD personnel or by non-EOD personnel (Explosive Ordnance Reconnaissance Officers who have completed a specialized course);
- Clearing areas of conventional explosive munitions to eliminate any threat produced by them by neutralizing and destroying them according to certain specific procedures tested and applied by EOD personnel;
- The neutralization and destruction of improvised explosive devices, a capability that is most often achieved in military conflict zones by locating, identifying, making safe, and destroying them; neutralization and destruction of chemical, biological, radiological, and nuclear munitions, a capability that requires thorough training in chemical agents and their methods of disposal without causing damage.
2. Previous Work
3. Design of the Mechanical Structures of the Serial-Tracked Demining Robot
- The tracked base, this type of moving robot is more suitable for rough terrains and ensures the stability of the robot during military operations;
- The robotic system is a TRTTR serial modular robot with 5 degrees of freedom (3 translations and 2 rotation modulus). The robot is equipped with an end-effector to carry out demining tasks, respectively clearing the land of exploded mines;
- The unexploded mine detection device with a translation system mounted on the bottom of the tracked base.
- The robot must autonomously perform the full range of activities necessary for the field cleaning process: survey, field scanning, marking the corridors made in the minefields, and destroying the mines, in different weather conditions and land surfaces, respectively [29];
- The robot should be built on a low budget, to have reduced overall dimensions, increased scanning capability, and a demining speed of at least 1.5 m/s in slightly rugged terrain so that it can be used in humanitarian demining;
- The robot must mark the corridors in the minefields throughout the execution of the demining mission;
- It must have a robust construction to ensure good resistance to explosions and to be easy to repair or replace malfunctioning parts. To protect the exposed mechanical parts of the structure of the horizontal and vertical arm of the serial robot are provided with flexible non-flammable covers;
- The robot should operate based on solar energy using energy-conserving photovoltaic cells to ensure uninterrupted operation at the normal parameters of the robot, both during the day and at night. Selection of drive motors with minimal energy consumption and reduced masses and dimensions, respectively;
- For human operators or EOD safety, it must be handled remotely (wireless).
4. Dynamic Model of the TRTTR Serial Structure of Tracked Robot
5. Numerical Validation of Dynamic Model
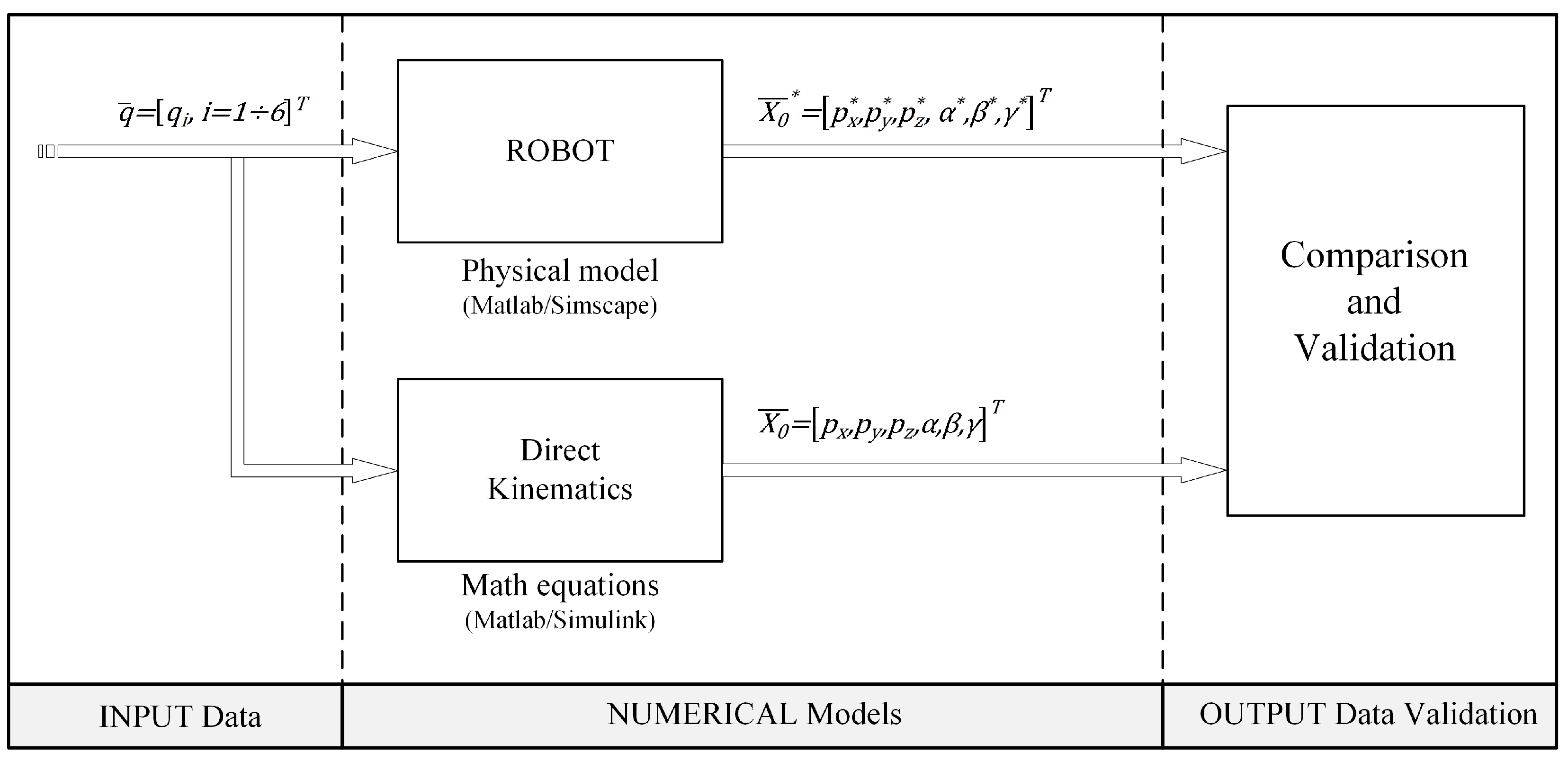
5.1. Method Description
5.1.1. Validation of Direct Kinematics Model
5.1.2. Validation of Dynamic Model (Lagrange Equations)
5.2. Numerical Results
- Robot—Physical Model: physical modeling of robot components with elements from the Matlab/Simulink/Simscape/MultiBody libraries;
- Direct Kinematics model: math equations according to [10];
- Dynamic model—Lagrange equations: Simulink implementation of the Lagrange Equations (17).
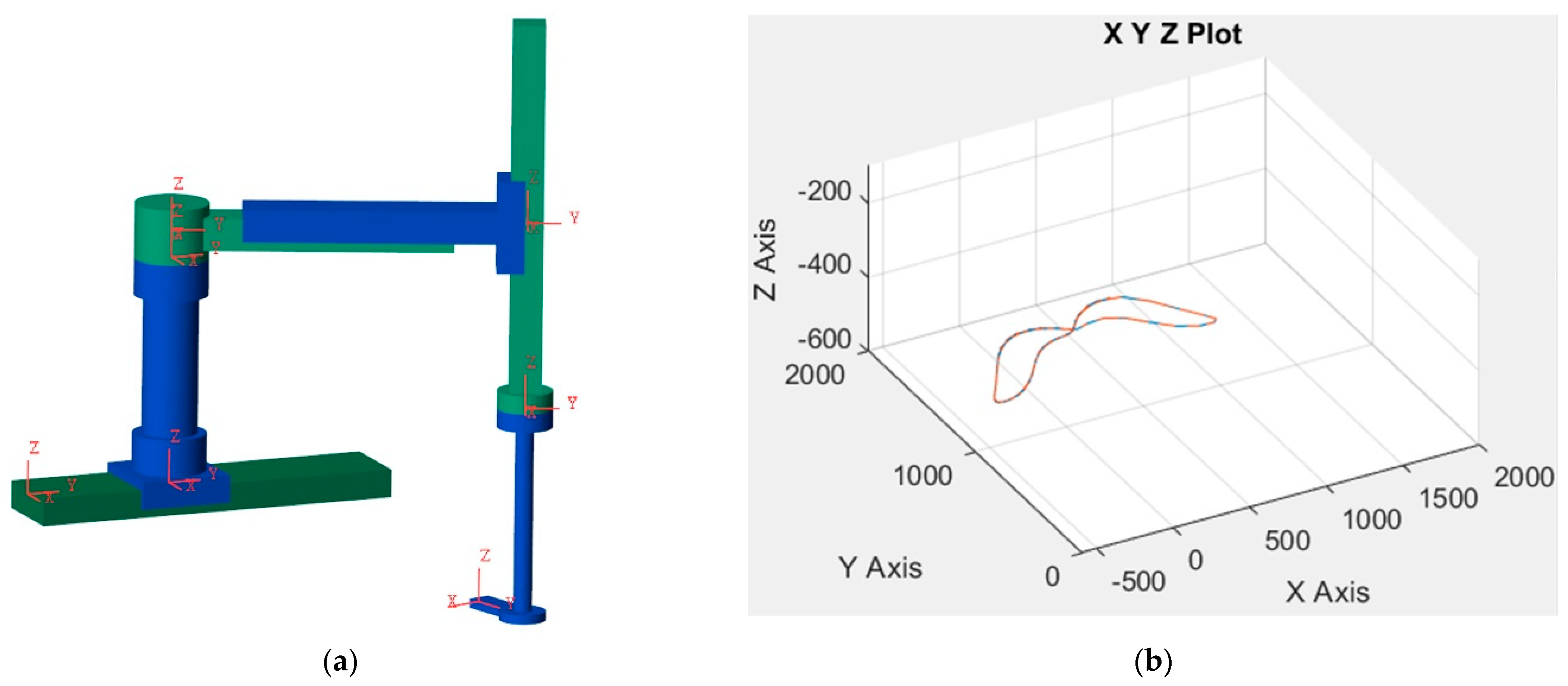
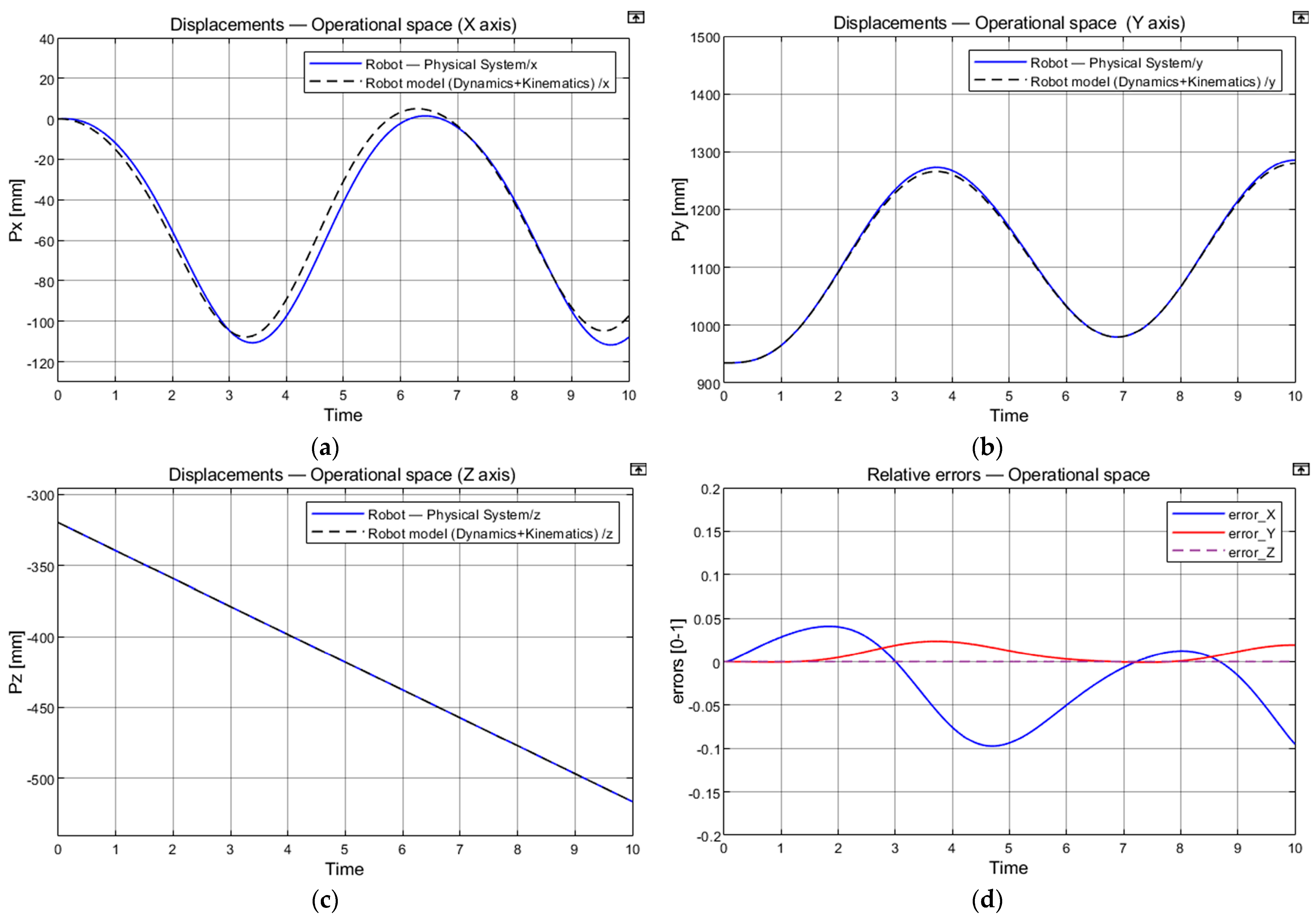
5.2.1. Validation of Direct Kinematic Model
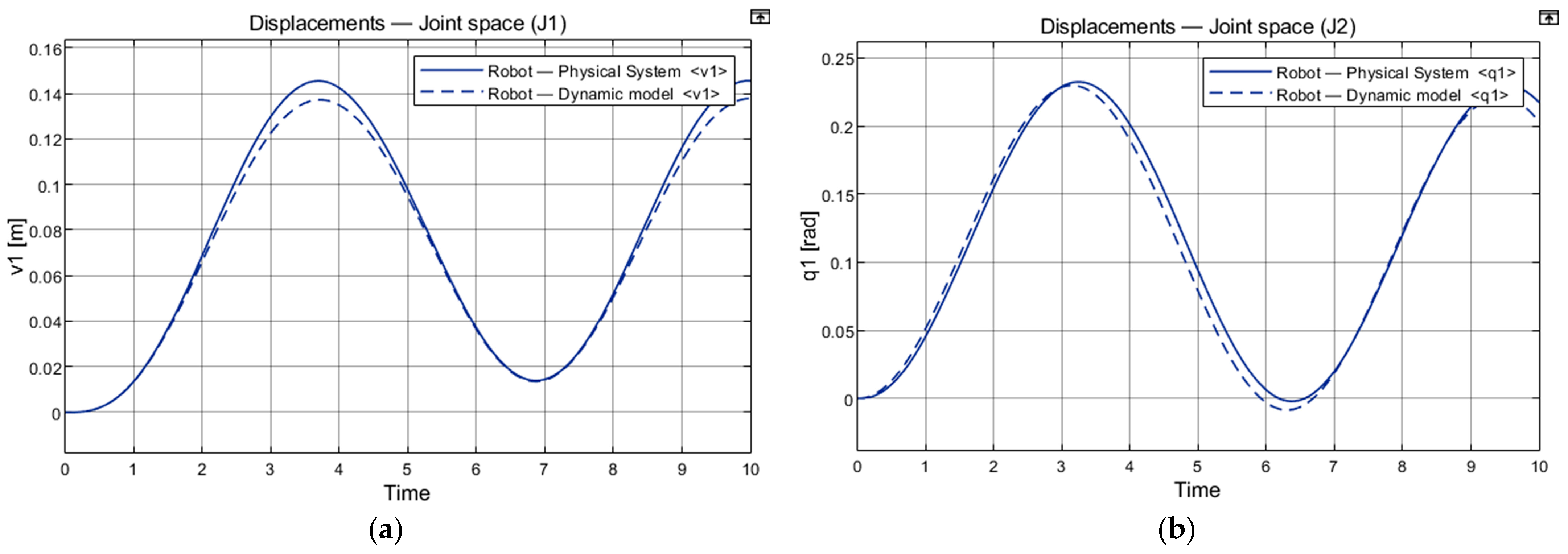
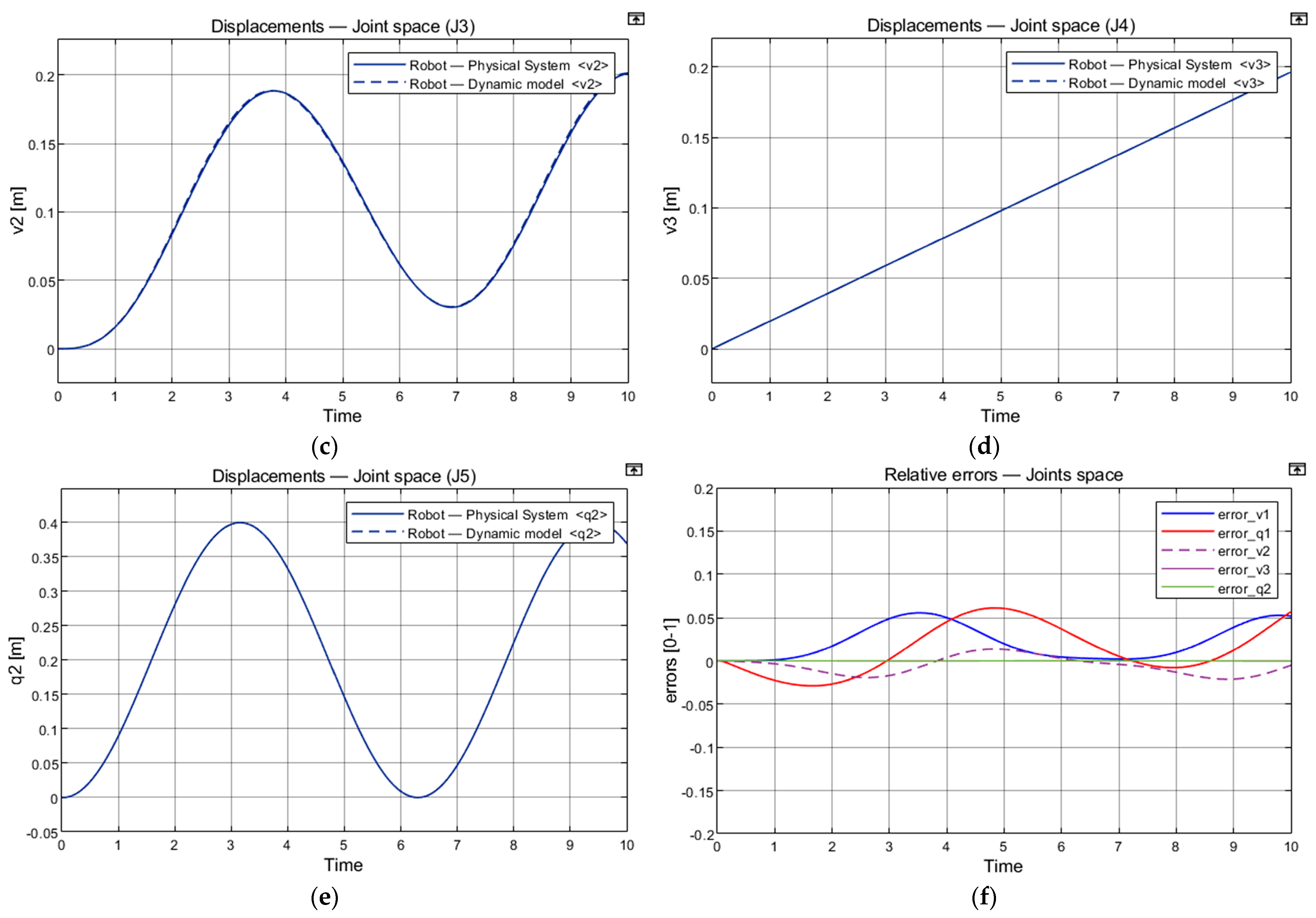
5.2.2. Validation of Dynamic Model
6. Driving Motors Selection of the Translation Modules
7. Conclusions
8. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Portugal, D.; Cabrita, G.; Gouveia, B.D.; Santos, D.C.; Prado, J.A. RETRACTED: An autonomous all terrain robotic system for field demining missions. Robot. Auton. Syst. 2015, 70, 126–144. [Google Scholar] [CrossRef]
- Rachkov, M.Y.; Marques, L.; De Almeida, A.T. Multisensor Demining Robot. Auton. Robot. 2005, 18, 275–291. [Google Scholar] [CrossRef]
- Available online: https://reliefweb.int/report/colombia/colombia-antipersonnel-mines-and-explosive-remnants-war (accessed on 7 January 2023).
- Debenest, P.; Fukushima, E.F.; Tojo, Y.; Hirose, S. A New Approach to Humanitarian Demining Part 1: Mobile Platform for Operation on Unstructured Terrain. Auton. Robot. 2005, 18, 303–321. [Google Scholar] [CrossRef]
- Available online: https://reliefweb.int/report/mali/mali-increase-civilian-victims-explosive-devices-dg-echo-unmas-echo-daily-flash-14-october-2022 (accessed on 7 January 2023).
- JP 3-42 Joint Explosive Ordnance Disposal. Available online: http://www.jcs.mill (accessed on 16 January 2022).
- Gao, F.; Zhang, H.; Li, Y.; Deng, W. Research on target recognition and path planning for EOD robot. Int. J. Comput. Appl. Technol. 2018, 57, 325–333. [Google Scholar] [CrossRef]
- Fang, W. Design of Obstacle Avoidance Control System for Mobile Robot Based on Vision. In Cyber Security Intelligence and Analytics: The 4th International Conference on Cyber Security Intelligence and Analytics (CSIA 2022); Springer: Cham, Switzerland, 2022; pp. 1005–1011. [Google Scholar] [CrossRef]
- Petrişor, S.M.; Simion, M. Example of good practices regarding the organological construction of a robotized technological product for humanitarian engineering operations. Acta Tech. Napoc. Ser. Appl. Math. Mech. Eng. 2021, 64, 395–402. Available online: https://atna-mam.utcluj.ro/index.php/Acta/article/view/1643 (accessed on 14 November 2021).
- Petrişor, S.M.; Simion, M. Aspects Regarding the Elaboration of the Geometric, Kinematic and Organological Study of a Robotic Technological Product “Humanitarian PetSim Robot” Used as an Avant-Garde Element of the Human Factor in High Risk Areas. In Intelligent Systems and Applications: Proceedings of the 2020 Intelligent Systems Conference (IntelliSys); Springer: Berlin/Heidelberg, Germany, 2020; pp. 322–334. [Google Scholar] [CrossRef]
- Jaradat, M.A.; Bani-Salim, M.; Awad, F. A Highly-Maneuverable Demining Autonomous Robot: An Over-Actuated Design. J. Intell. Robot. Syst. 2018, 90, 65–80. [Google Scholar] [CrossRef]
- de Cubber, G.; Balta, H.; Lietart, C. Teodor: A Semi-Autonomous Search and Rescue and Demining Robot. Appl. Mech. Mater. 2014, 658, 599–605. [Google Scholar] [CrossRef]
- Hemapala, M.; Belotti, V.; Michelini, R.; Razzoli, R. Humanitarian demining: Path planning and remote robotic sweeping. Ind. Robot. Int. J. Robot. Res. Appl. 2009, 36, 146–156. [Google Scholar] [CrossRef]
- Tojo, Y.; Debenest, P.; Fukushima, E.F.; Hirose, S. Robotic System for Humanitarian Demining Development of Weight-Compensated Pantograph Manipulator. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 2025–2030. [Google Scholar]
- Debenest, P.; Fukushima, E.F.; Tojo, Y.; Hirose, S. A New Approach to Humanitarian Demining Part 2: Development and Analysis of Pantographic Manipulator. Auton. Robot. 2005, 18, 323–336. [Google Scholar] [CrossRef]
- Hemapala, K.; Razzoli, R.P. Design and Development of a Landmines Removal Robot. Int. J. Adv. Robot. Syst. 2012, 9, 5. [Google Scholar] [CrossRef]
- Mori, Y.; Takayama, K.; Adachi, T.; Omote, S.; Nakamura, T. Feasibility Study on an Excavation-Type Demining Robot. Auton. Robot. 2005, 18, 263–274. [Google Scholar] [CrossRef]
- Montes, H.; Mena, L.; Fernández, R.; Sarria, J.; de Santos, P.G.; Armada, M. Hexapod robot for humanitarian demining. In Proceedings of the 8th IARP Workshop on Robotics for Risky Environments, Escola Naval da Marinha Portuguesa, Lisboa, Portugal, 28–29 January 2015; Available online: http://hdl.handle.net/10261/111656 (accessed on 14 October 2022).
- Colon, E.; De Cubber, G.; Ping, H.; Habumuremyi, J.-C.; Sahli, H.; Baudoin, Y. Integrated Robotic systems for Humanitarian Demining. Int. J. Adv. Robot. Syst. 2007, 4, 24. [Google Scholar] [CrossRef]
- Baudoin, Y.; Acheroy, M.; Piette, M.; Salmon, J.P. Humanitarian Demining and Robotics. J. Mine Action 1999, 3, 1–9. Available online: https://commons.lib.jmu.edu/cisr-journal/vol3/iss2/ (accessed on 14 October 2022).
- Kang, S.P.; Choi, J.; Suh, S.-B.; Kang, S. Design of mine detection robot for Korean mine field. In 2010 IEEE Workshop on Advanced Robotics and its Social Impacts; IEEE: Piscataway, NJ, USA, 2010; pp. 53–56. [Google Scholar] [CrossRef]
- Havlík, S.; Licko, P. Humanitarian Demining: The Challenge for Robotic Research. J. Humanit. Demining 1998, 2, 2. [Google Scholar]
- Colon, E.; Hong, P.; Habumuremyi, J.-C.; Doroftei, I.; Baudoin, Y.; Shali, H.; Milojevic, D.; Weemaels, J. An integrated robotic system for antipersonnel mines detection. Control Eng. Pract. 2002, 10, 1283–1291. [Google Scholar] [CrossRef]
- Habib, M.K. Service Robots and Humanitarian Demining, Mobile Robots Towards New Applications; Lazinica, A., Ed.; I-Tech Education and Publishing: Rijeka, Croatia, 2006; pp. 449–480. ISBN 978-3-86611-314-5. [Google Scholar] [CrossRef]
- Habib, M.K. Humanitarian Demining: The Problem, Difficulties, Priorities, Demining Technology and the Challenge for Robotics, Humanitarian Demining: Innovative Solutions and the Challenges of Technology; Habib, M.K., Ed.; I-Tech Education and Publishing: Vienna, Austria, 2008; p. 392. ISBN 978-3-902613-11-0. [Google Scholar]
- Kopacek, P. Robots for Humanitarian Demining. In Advances in Automatic Control; The Springer International Series in Engineering and Computer Science; Voicu, M., Ed.; Springer: Boston, MA, USA, 2004; Volume 754. [Google Scholar]
- Santana, P.F.; Barata, J.; Correia, L. Sustainable Robots for Humanitarian Demining. Int. J. Adv. Robot. Syst. 2007, 4, 207–218. [Google Scholar] [CrossRef]
- Gonzalez de Santos, P.; Garcia, E.; Cobano, J.A.; Guardabrazo, T. Using Walking Robots for Humanitarian Demining Tasks. In Proceedings of the 35th International Symposium on Robotics, Paris, France, 23–26 March 2004. [Google Scholar]
- Swett, B.A.; Hahn, E.N.; Llorens, A.J. Designing Robots for the Battlefield: State of the Art, In Robotics, AI, and Humanity; von Braun, J., Archer, S.M., Reichberg, G.M., Sánchez Sorondo, M., Eds.; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Petrişor, S.M. Industrial Robots Used in Special Applications, The ”Nicolae Bălcescu”; Land Forces Academy Publishing House: Sibiu, Romania, 2010. [Google Scholar]
- Li, D.-Q.; Hong, H.-J.; Jiang, X.-L. Dynamics Modeling, Control System Design and Simulation of Manipulator Based on Lagrange Equation. In Mechanism and Machine Science. ASIAN MMS CCMMS 2016, Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2017; Volume 408, pp. 1129–1141. [Google Scholar] [CrossRef]
- Ispas, V. Manipulators and Industrial Robots; Didactic and Pedagogic Publishing House: Bucharest, Romania, 2004. [Google Scholar]
- Negrean, I. Kinematics and Dynamics of Robots: Modeling—Experiment—Precision; Didactic and Pedagogic Publishing House: Bucharest, Romania, 1999. [Google Scholar]
- Drimer, D.; Oprean, A.; Dorin, A.; Alexandrescu, M.; Paris, A.; Panaitopol, N.; Udrea, C.; Crişan, I. Industrial Robots and Manipulators; Technical Publishing House: Bucharest, Romania, 1985. [Google Scholar]
- Petrişor, S.M.; Bârsan, G. Aspects on the design, implementation, and simulation of a tracked mini robot destined for special applications in theatres of operations. In Proceedings of the Sixth International Conference on Machine Vision (ICMV 2013), London, UK, 16–17 November 2013. [Google Scholar] [CrossRef]
- Chircor, M.; Curaj, A. Kinematic, Dynamic Elements and Trajectory Planning of Industrial Robots; The Publishing House of the Romanian Academy: Bucharest, Romania, 2001. [Google Scholar]
- Chişiu, A.; Matieşan, D.; Mãdãrãşan, T.; Pop, D. Machine Parts; Didactic and Pedagogic Publishing House Bucharest: Bucharest, Romania, 1981. [Google Scholar]
- Petrişor, S.M.; Bârsan, G. Aspects on the Calculus and Construction of Translation Modules in the Mechanical Structure of an Industrial Robot Possessing Four Degrees of Freedom. Appl. Mech. Mater. 2013, 390, 166–171. [Google Scholar] [CrossRef]
- Available online: https://www.directindustry.com/prod/trinamic-motion-control-gmbh-co-kg/product-60190-687513.html (accessed on 7 January 2023).
- STAS 6012-82, General Purpose Reducers. Transmission Reports. Available online: https://bjiasi.ebibliophil.ro/mon/stas-6012-82-reductoare-de-turatie-rapoarte-de-transmitere-b837rnnx/ (accessed on 7 January 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Frictional Force | Dwell Angle | Power Driving Motor and | Theoretical Driving |
|---|---|---|---|---|
| Type | Ff | φ | Angular Speed | Moment |
| Ratio | Mm_theoretical | |||
| Pm/nm | ||||
| [N] | [°] | [kW·min/rot] | [N·m] | |
| MTB SIL | 33.367 | 4.852 | 1.65421·10−3 | 1.93 |
| MTV SIL | 16.226 | 4.852 | 0.1253·10−3 | 0.10 |
| MT SIL | 7.626 | 4.852 | 0.02385·10−3 | 0.35 |
| Module | Selected | Servo- | Rotation Speed | Driving Power | Mass |
|---|---|---|---|---|---|
| Type | Driving Motor | Motor Type | nm | P | m |
| Moment | |||||
| Mm_selected | |||||
| [N·m] | [rpm] | [kW] | [kg] | ||
| MTB SIL | 2.15 | QBL17E40-01D-05RO | 5000 | 1.2 | 3.3 |
| MTV SIL | 0.18 | QBL4208-81-04-019 | 4000 | 0.07 | 1.5 |
| MT SIL | 0.56 | QBL4208-81-04-019 | 4000 | 0.08 | 1.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petrişor, S.M.; Simion, M.; Bârsan, G.; Hancu, O. Humanitarian Demining Serial-Tracked Robot: Design and Dynamic Modeling. Machines 2023, 11, 548. https://doi.org/10.3390/machines11050548
Petrişor SM, Simion M, Bârsan G, Hancu O. Humanitarian Demining Serial-Tracked Robot: Design and Dynamic Modeling. Machines. 2023; 11(5):548. https://doi.org/10.3390/machines11050548
Chicago/Turabian StylePetrişor, Silviu Mihai, Mihaela Simion, Ghiţã Bârsan, and Olimpiu Hancu. 2023. "Humanitarian Demining Serial-Tracked Robot: Design and Dynamic Modeling" Machines 11, no. 5: 548. https://doi.org/10.3390/machines11050548
APA StylePetrişor, S. M., Simion, M., Bârsan, G., & Hancu, O. (2023). Humanitarian Demining Serial-Tracked Robot: Design and Dynamic Modeling. Machines, 11(5), 548. https://doi.org/10.3390/machines11050548