

Aerodynamic Performance of V8 Octorotor MAV with Different Rotor Configurations in Hover

Abstract
1. Introduction
2. Aerodynamic Model of V8 Octorotor MAV
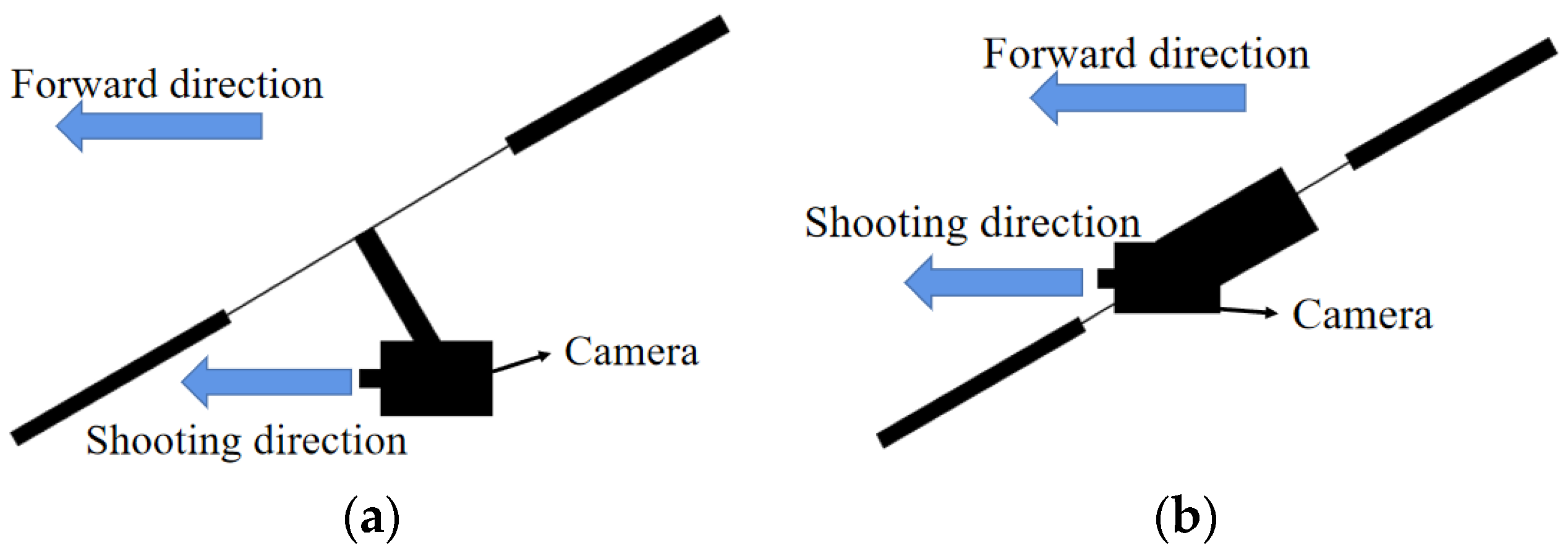
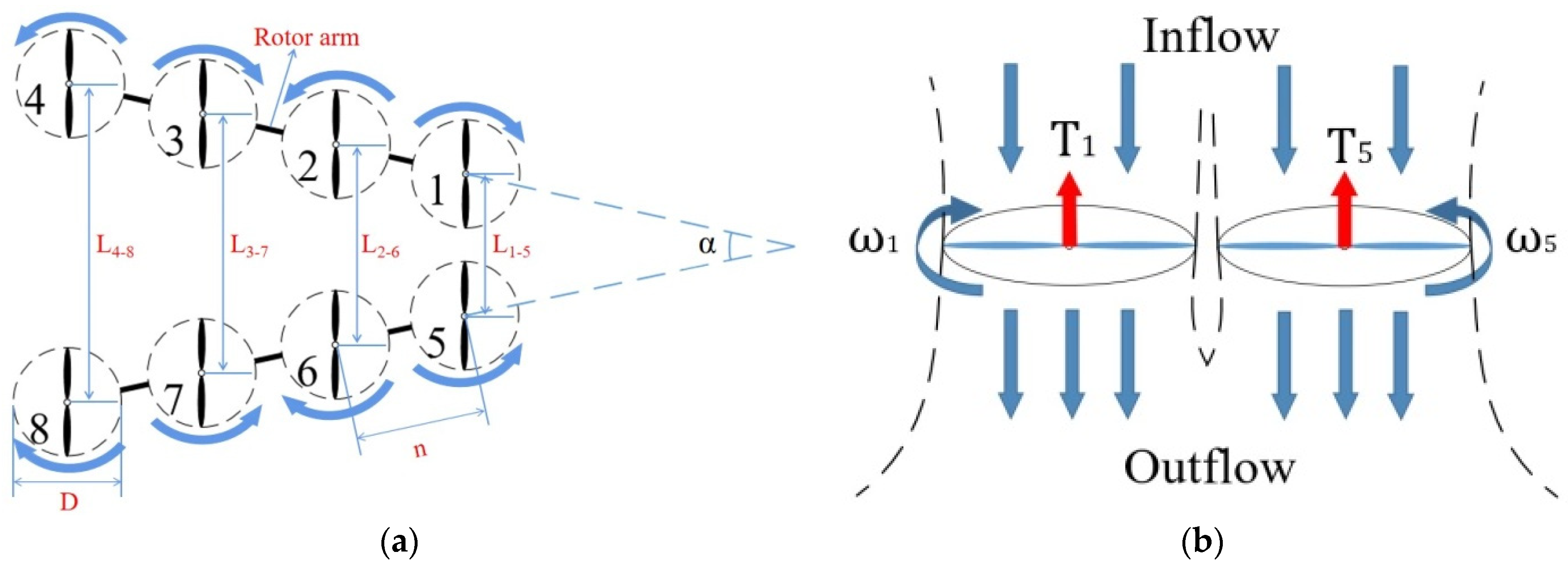
2.1. V8 Configuration
2.2. Theoretical Analyze
2.2.1. Aerodynamic performance
2.2.2. Turbulence Analysis
3. Technique Approach
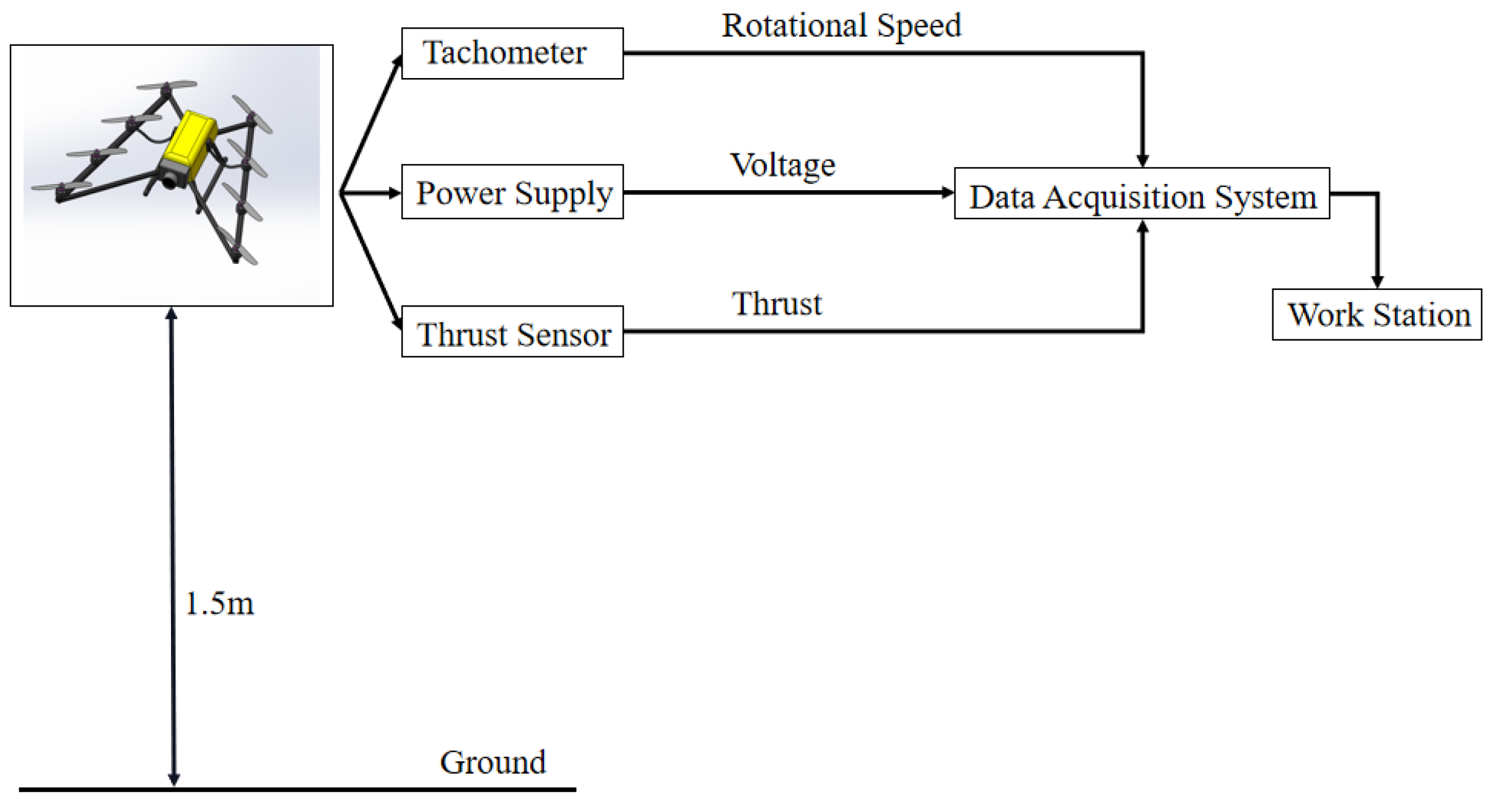
3.1. Experiment
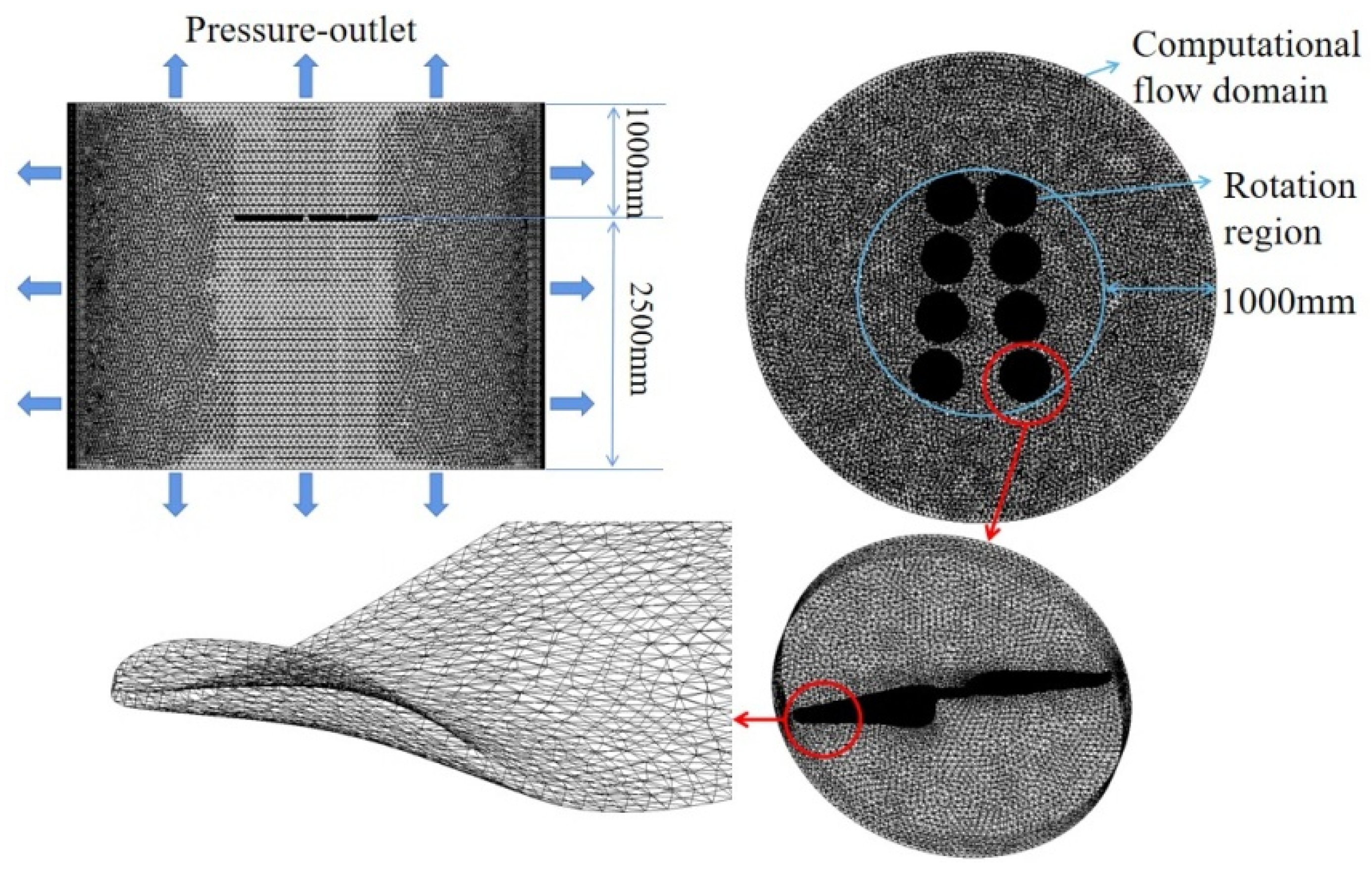
3.2. Numerical Simulation
4. Results
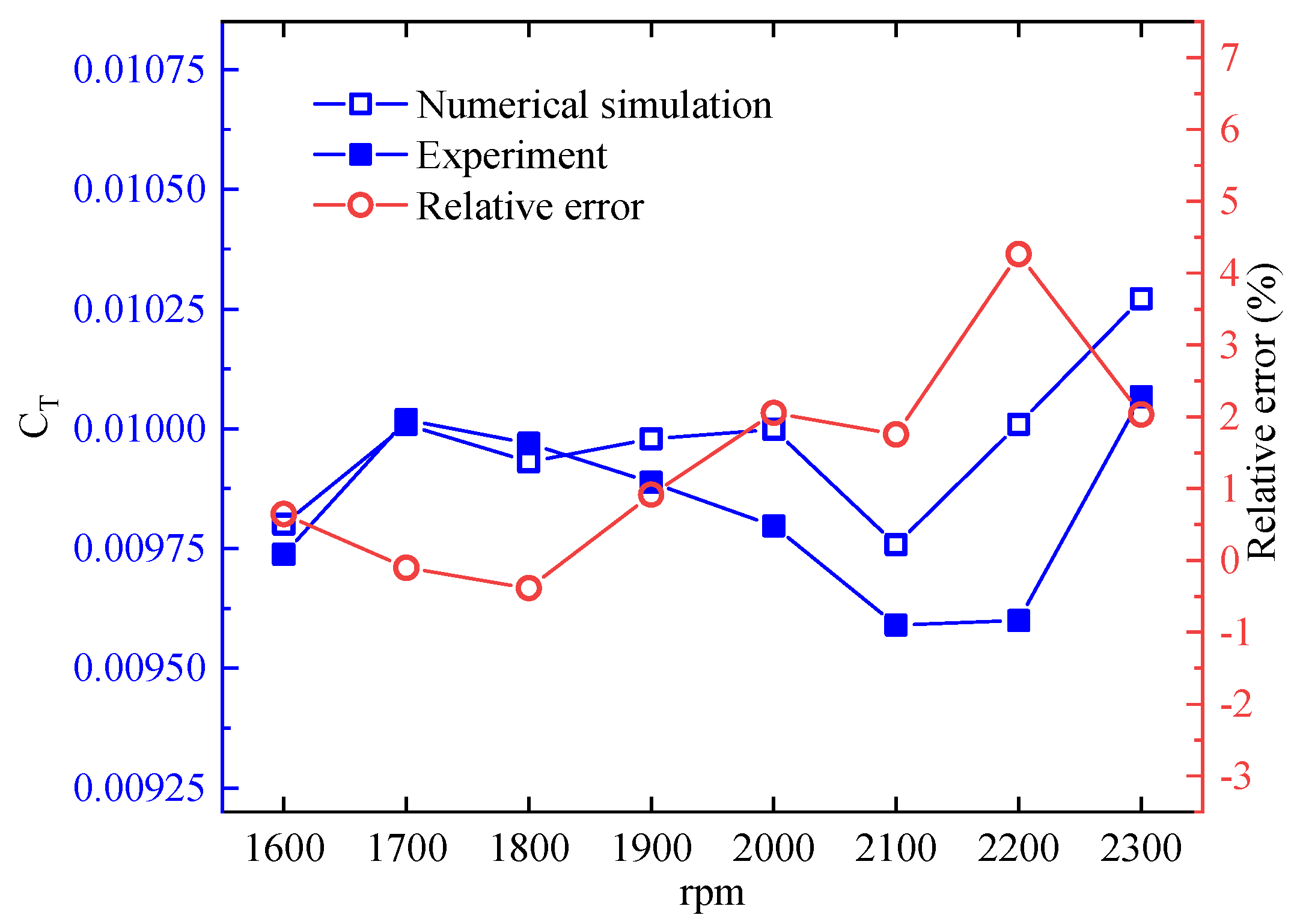
4.1. Experiment Results
4.2. Numerical Simulations Results
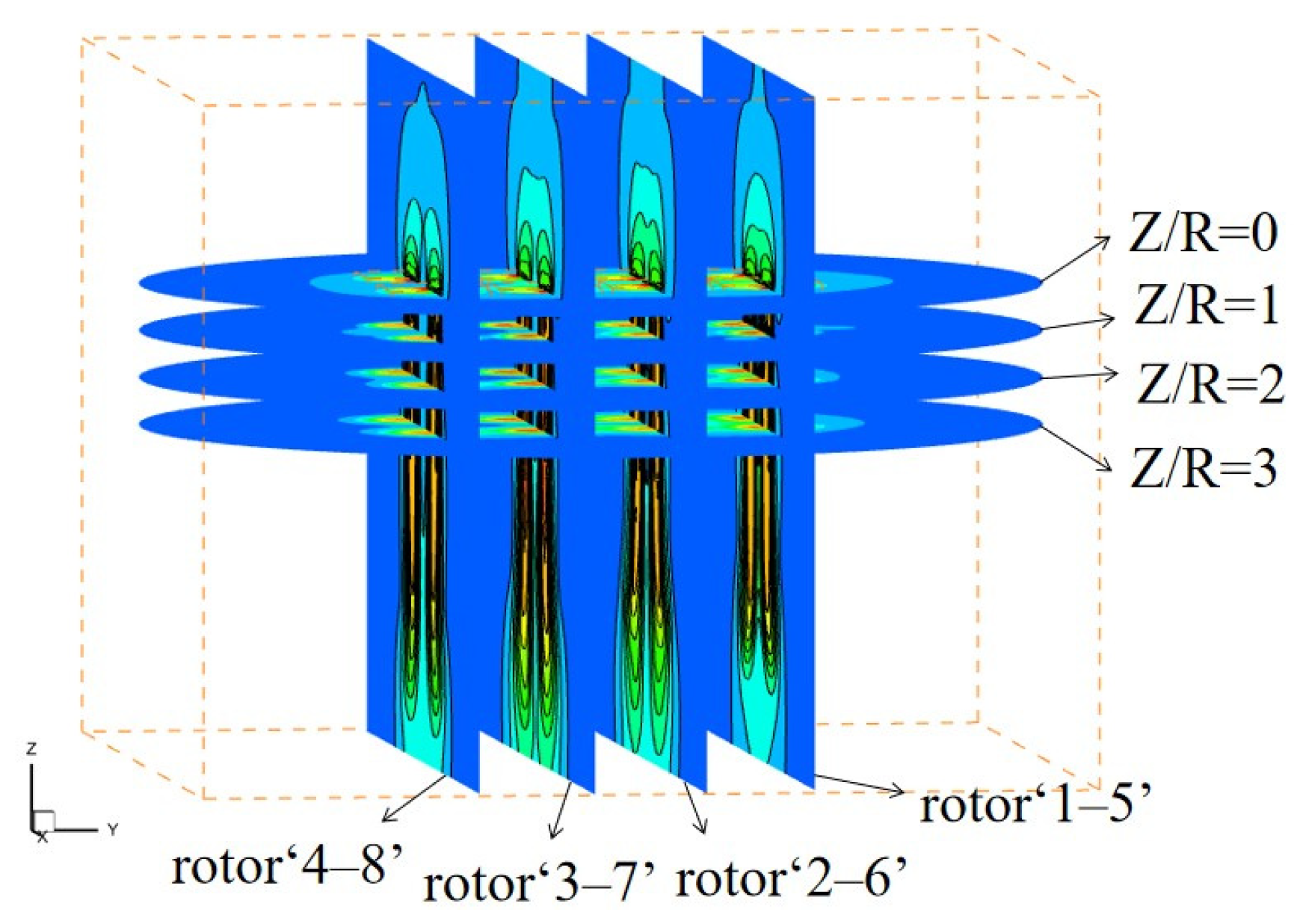
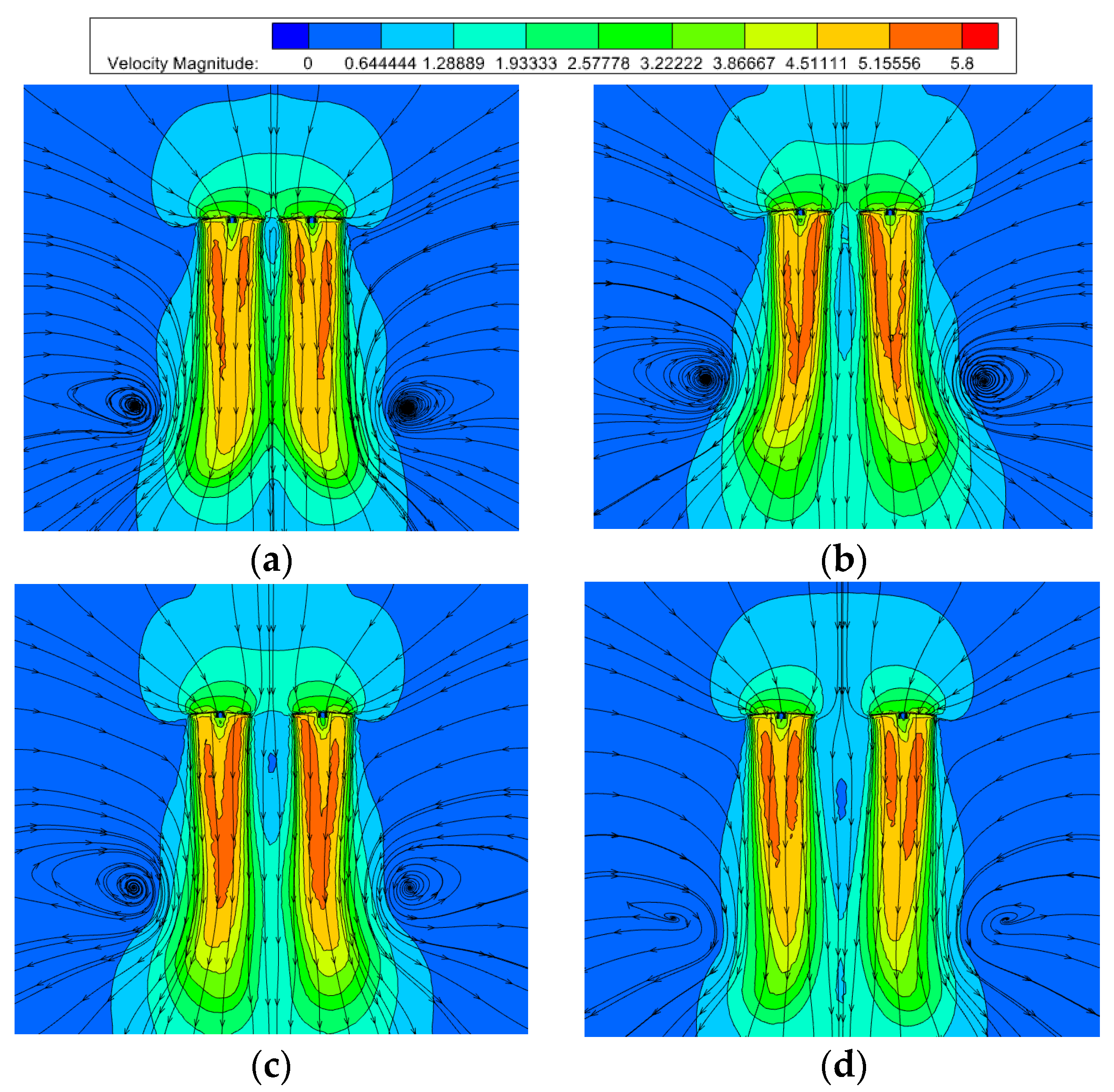
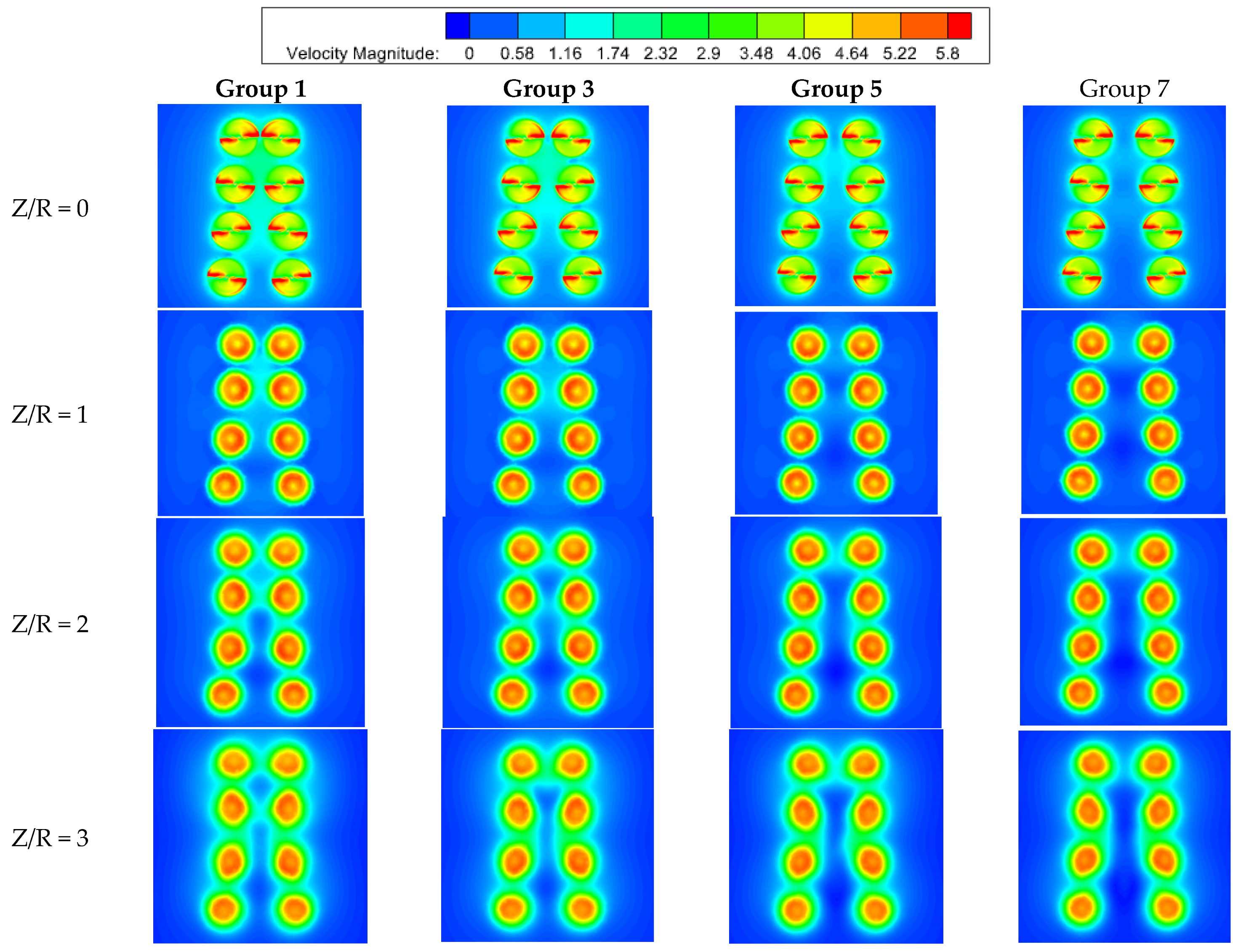
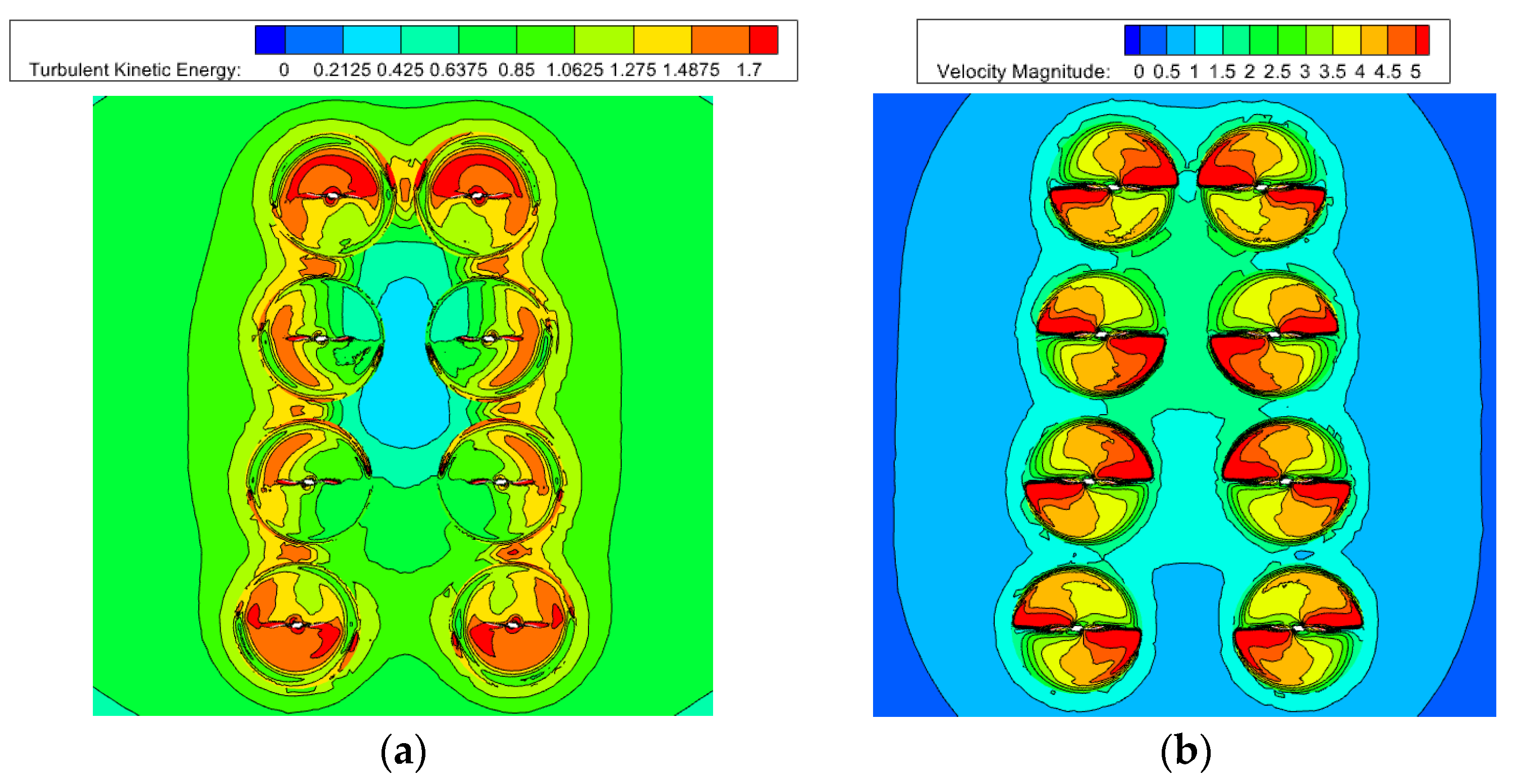
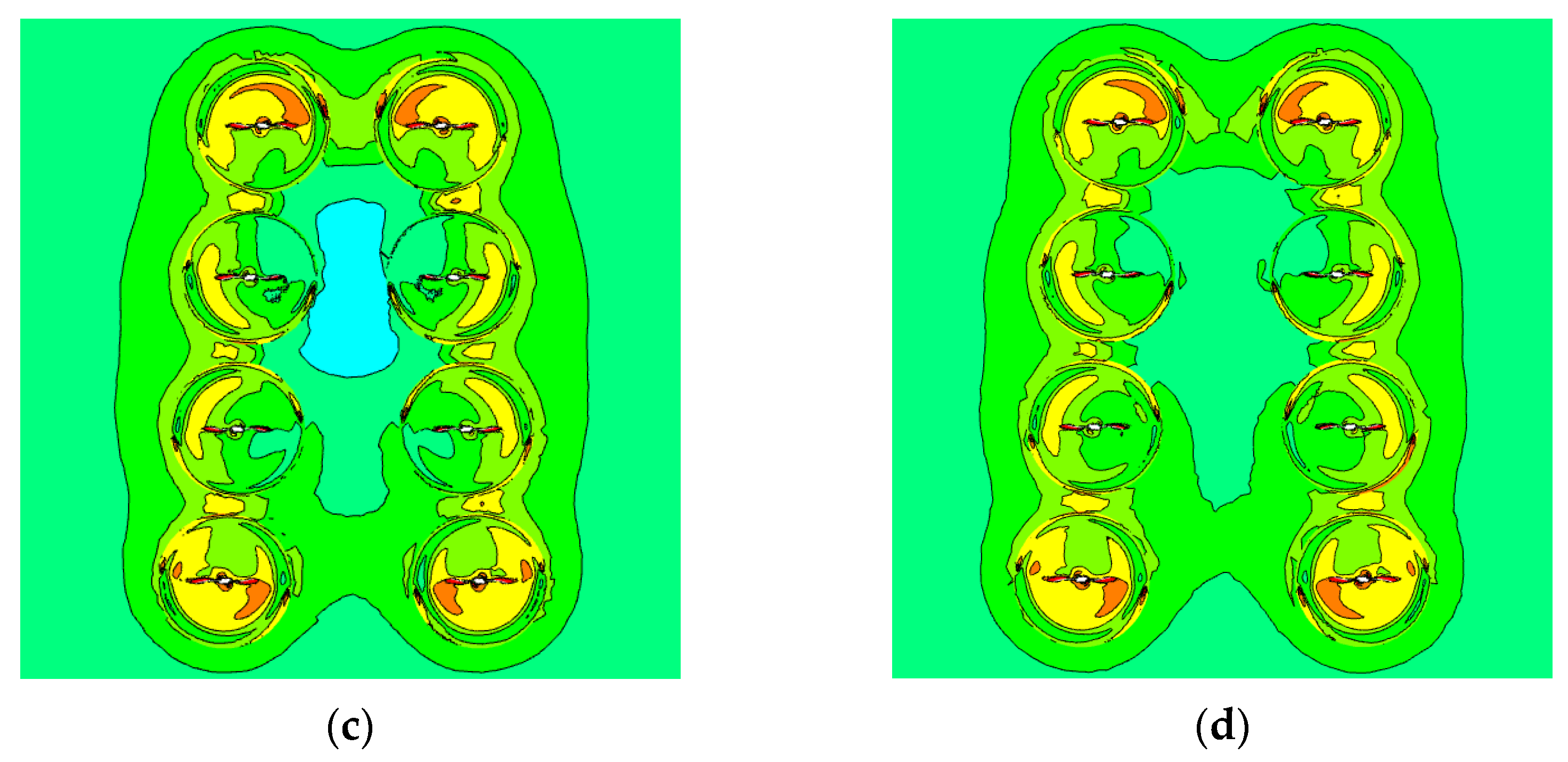
4.2.1. Velocity and Streamline Distribution
4.2.2. Turbulent Kinetic Energy Distribution
5. Conclusions
- (1)
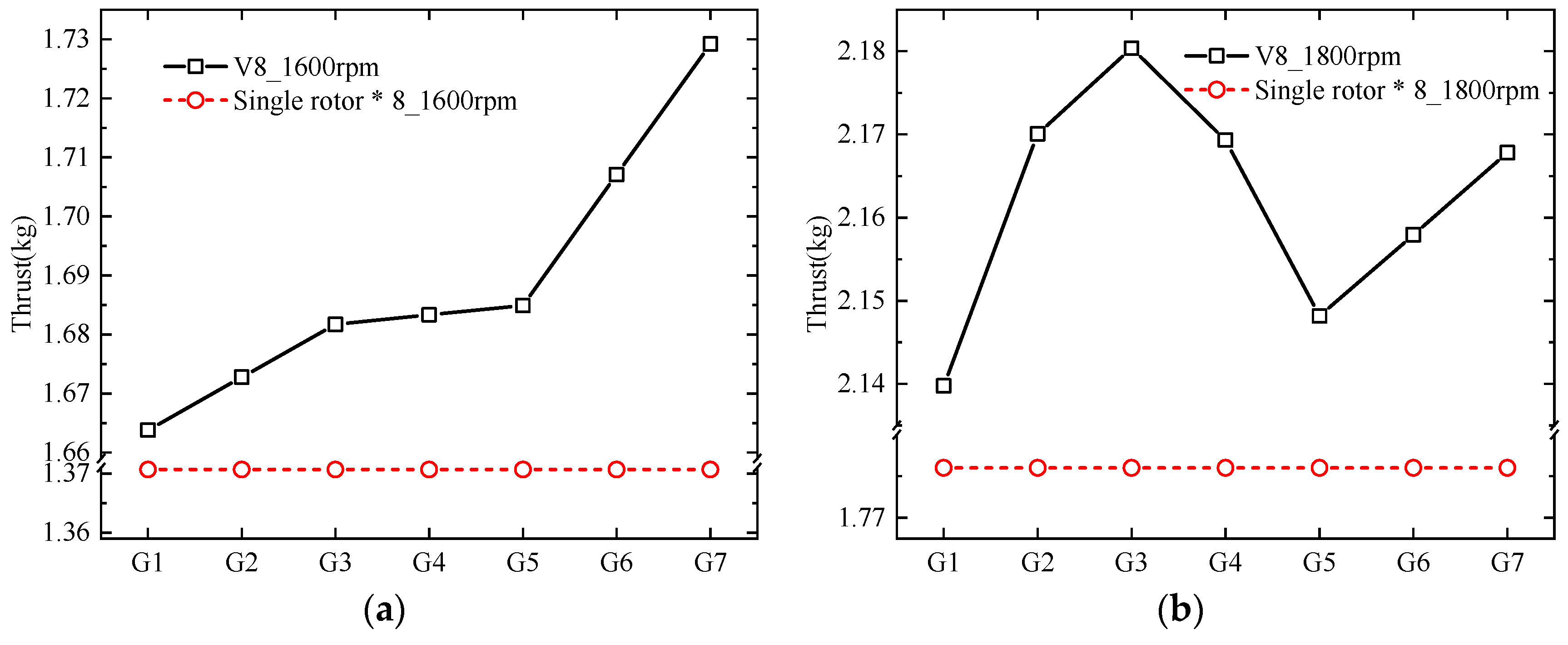
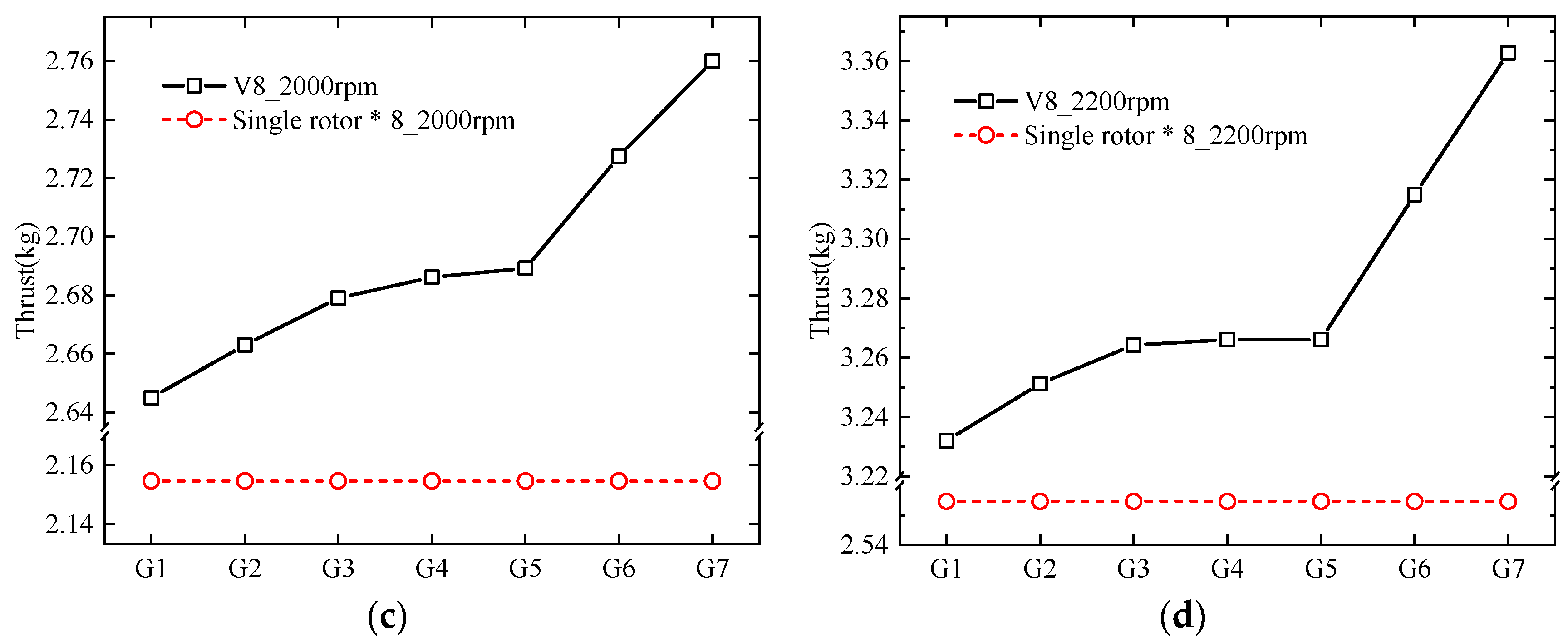
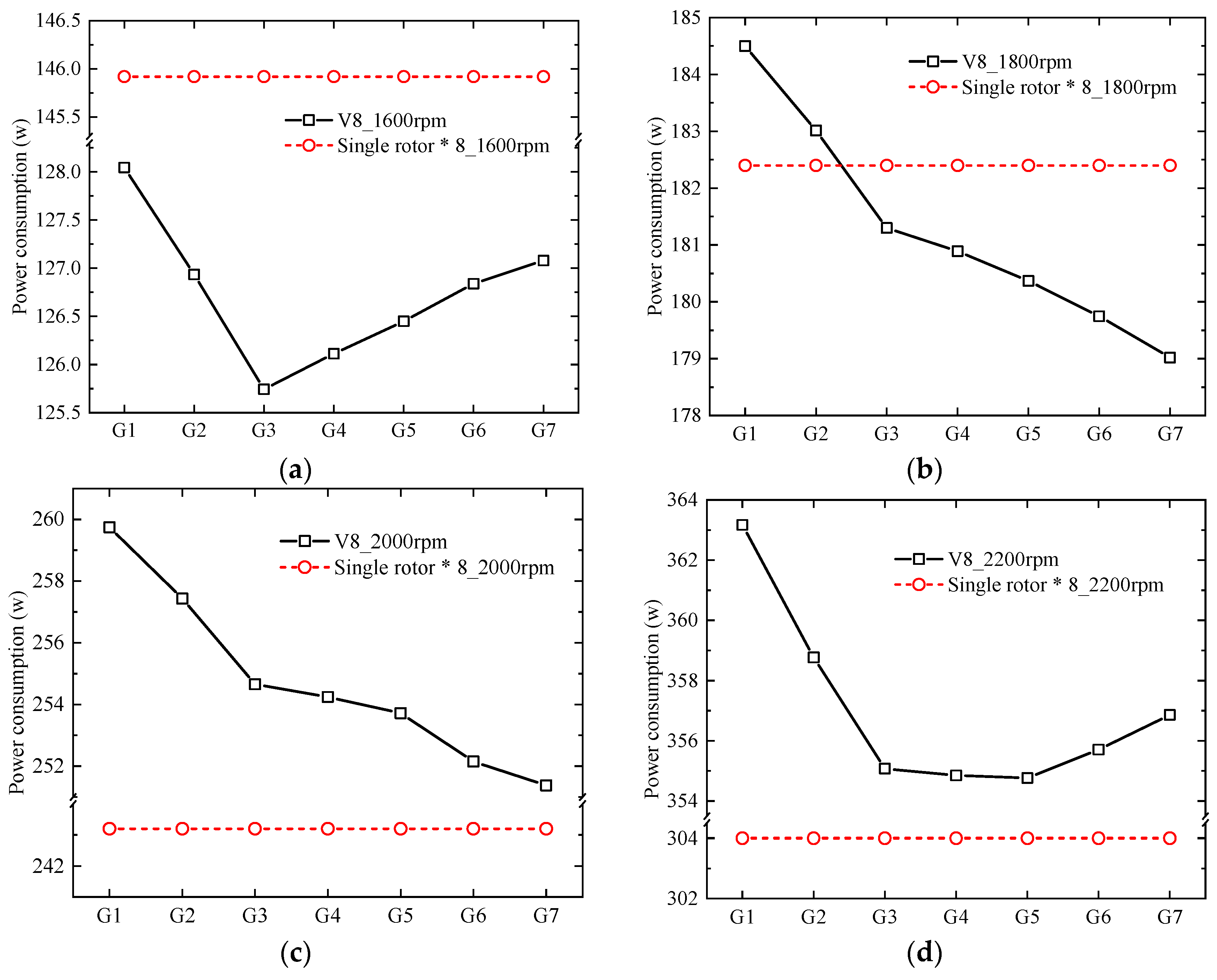
- The aerodynamic performance of the V8 Octorotor MAV is much improved compared to traditional MAVs. The thrust increased with the rotor spacing and it is also higher than the sum of the eight single rotors, which indicates that the rotor interference is inclined to increase the thrust as an improvement of the V8 Octorotor MAV. Additionally, the power consumption is also decreased, especially for the lower rotor spacing. It is interesting to note that the aerodynamic performance characterized with power loading and flight efficiency is much improved in this case.
- (2)
- Numerical simulations showed that the improved performance comes from the collapse of the suction forces on the tip and the increase in turbulent kinetic energy caused by the flow separation. The outflow is relatively unsteady at some rotor spacing, and the rotor is apt to have somewhat greater interaction with its own wake. This highlighted interaction may lead to the decrease of PL. For higher rotor spacing, the vortex deformation related to the power consumption also results from the movement of the vortices and the symmetric of the vortices, which may cause vibration or extra power consumption, or even offset the rotor interference with a small extra induced power.
- (3)
- The V8 Octorotor MAV of Group 3 (1.2D–1.4D–1.6D–1.8D) is the optimal rotor configuration in hover where the downwash interference is relatively stable for all the rotor speed and the turbulent kinetic energy is also concentrated at the blade tip. In this case, the V8 Octorotor MAV is advantageous for obtaining extra thrust with decreasing power for higher flight duration and hover efficiency. Further studies will involve the advanced control strategies with the rotor interference and more field flight tests.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Atmaca, M.; Cetin, B.; Yilmaz, E. CFD Analysis of Unmanned Aerial Vehicles (UAV) Moving in Flocks. Acta Phys. Pol. A 2019, 135, 694–696. [Google Scholar] [CrossRef]
- Otsuka, H.; Nagatani, K. Thrust Loss Saving Design of Overlapping Rotor Arrangement on Small Multirotor Unmanned Aerial Vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3242–3248. [Google Scholar]
- Teng, H.; Ahmad, I.; Alamgir, M.S.M.; Chang, K. 3D Optimal Surveillance Trajectory Planning for Multiple UAVs by Using Particle Swarm Optimization With Surveillance Area Priority. IEEE Access 2020, 8, 86316–86327. [Google Scholar] [CrossRef]
- Ni, X.; Yin, Q.; Wei, X.; Zhong, P.; Nie, H. Research on Landing Stability of Four-Legged Adaptive Landing Gear for Multirotor UAVs. Aerospace 2022, 9, 776. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, G.P.; Xia, C. Analysis of fixed-wing VTOL aircraft with gas-driven fan propulsion system. Aerosp. Sci. Technol. 2020, 104, 105984. [Google Scholar] [CrossRef]
- Bogue, R. The role of robots in the green economy. Ind. Robot. Int. J. Robot. Res. Appl. 2022, 49, 6–10. [Google Scholar] [CrossRef]
- Rezazadeh, S.; Shahri, A.M.; Farrokhi, M. Dynamical Modeling and Experimental Validation of a Novel V8 Octorotor Flying Robot. In Proceedings of the 2016 4th International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 January 2016; pp. 366–371. [Google Scholar]
- Cole, J.A.; Krebs, T.; Barcelos, D.; Bramesfeld, G. Influence of Propeller Location, Diameter, and Rotation Direction on Aerodynamic Efficiency. J. Aircr. 2021, 58, 63–71. [Google Scholar] [CrossRef]
- Lei, Y.; Huang, Y.; Wang, H. Aerodynamic Performance of an Octorotor SUAV with Different Rotor Spacing in Hover. Processes 2020, 8, 1364. [Google Scholar] [CrossRef]
- Zou, X.; Ling, M.; Zhai, W. Aerodynamic and Vibration Characteristics of the Micro-Octocopter at Low Reynolds Number. Mob. Inf. Syst. 2021, 2021, 3691559. [Google Scholar] [CrossRef]
- Salazar, S.; Romero, H.; Lozano, R.; Castillo, P. Modeling and Real-Time Stabilization of an Aircraft Having Eight Rotors. J. Intell. Robot. Syst. 2009, 54, 455–470. [Google Scholar] [CrossRef]
- Osmic, N.; Kuric, M.; Petrovic, I. Detailed octorotor modeling and PD control. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 2182–2189. [Google Scholar]
- Haddadi, S.J.; Zarafshan, P. Design and Fabrication of an Autonomous Octorotor Flying Robot. In Proceedings of the 3rd RSI/ISM International Conference on Robotics and Mechatronics (ICROM), Tehran, Iran, 7–9 October 2015; pp. 702–707. [Google Scholar]
- Sadeghi, P.S.; Shahri, A.M.; Ardestani, M.A. LQG-I Control for Attitude Stabilization of V8 Octorotor Flying Robot. In Proceedings of the 6th Conference on Artificial Intelligence and Robotics (IRANOPEN), Qazvin, Iran, 9 April 2016; pp. 151–157. [Google Scholar]
- Castillo, P.; Lozano, R.; Dzul, A. Stabilization of a mini rotorcraft with four rotors. IEEE Control. Syst. Mag. 2005, 25, 45–55. [Google Scholar]
- Tayebi, A.; Mcgilvray, S. Attitude stabilization of a four-rotor aerial robot. In Proceedings of the 43rd IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; pp. 1216–1221. [Google Scholar]
- Luo, J.; Zhu, L.; Yan, G. Novel Quadrotor Forward-Flight Model Based on Wake Interference. AIAA J. 2015, 53, 3522–3533. [Google Scholar] [CrossRef]
- Bohorquez, F.; Samuel, P.; Sirohi, J.; Pines, D.; Rudd, L.; Perel, R. Design, analysis and hover performance of a rotary wing micro air vehicle. J. Am. Helicopter Soc. 2003, 48, 80–90. [Google Scholar] [CrossRef]
- Matus-Vargas, A.; Rodriguez-Gomez, G.; Martinez-Carranza, J. Ground effect on rotorcraft unmanned aerial vehicles: A review. Intell. Serv. Robot. 2021, 14, 99–118. [Google Scholar] [CrossRef]
- Lei, Y.; Bai, Y.; Xu, Z.; Gao, Q.; Zhao, C. An experimental investigation on aerodynamic performance of a coaxial rotor system with different rotor spacing and wind speed. Exp. Therm. Fluid Sci. 2013, 44, 779–785. [Google Scholar] [CrossRef]
- Ismail, N.I.; Zulkifli, A.H.; Abdullah, M.Z.; Basri, M.H.; Abdullah, N.S. Computational aerodynamic analysis on perimeter reinforced (PR)-compliant wing. Chin. J. Aeronaut. 2013, 26, 1093–1105. [Google Scholar] [CrossRef]
- Lin, L.; He, M.; Ma, W.; Wang, Q.; Zhai, H.; Deng, C. Dynamic Characteristic Analysis of the Multi-Stage Centrifugal Pump Rotor System with Uncertain Sliding Bearing Structural Parameters. Machines 2022, 10, 473. [Google Scholar] [CrossRef]
- Qin, K.; Ma, G.; Yao, G.; Xi, Y. Airfoil Pneumatic Impact of Missile Exhaust Jet Stream. J. Proj. Rocket. Missiles Guid. 2014, 34, 123–125+195. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Type | Accuracy |
|---|---|---|
| Tachometer | CZL601 | ±0.02% F.S. |
| Thrust sensor | DT2234C | ±0.05 n% + 1 d |
| Power supply | 903465 | 2000 mAh 3.7 V/25 C |
| No. | L1,5–L2,6–L3,7–L4,8 |
|---|---|
| Group 1 | 1.025D–1.225D–1.425D–1.625D |
| Group 2 | 1.1D–1.3D–1.5D–1.7D |
| Group 3 | 1.2D–1.4D–1.6D–1.8D |
| Group 4 | 1.3D–1.5D–1.7D–1.9D |
| Group 5 | 1.4D–1.6D–1.8D–2D |
| Group 6 | 1.5D–1.7D–1.9D–2.1D |
| Group 7 | 1.6D–1.8D–2.0D–2.2D |
| Rotor Diameter, mm | Average Chord, mm | Reynolds Number, 105 | Air Density, kg/m3 | Air Viscosity, kg/(m·s) | RPM | Mach Number |
|---|---|---|---|---|---|---|
| 400 | 35 | 0.59~0.99 | 1.225 | 1.7894 × 10−5 | 1500~2300 | 0.1–0.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, Y.; Feng, Z.; Ma, C. Aerodynamic Performance of V8 Octorotor MAV with Different Rotor Configurations in Hover. Machines 2023, 11, 429. https://doi.org/10.3390/machines11040429
Lei Y, Feng Z, Ma C. Aerodynamic Performance of V8 Octorotor MAV with Different Rotor Configurations in Hover. Machines. 2023; 11(4):429. https://doi.org/10.3390/machines11040429
Chicago/Turabian StyleLei, Yao, Zhicheng Feng, and Chensong Ma. 2023. "Aerodynamic Performance of V8 Octorotor MAV with Different Rotor Configurations in Hover" Machines 11, no. 4: 429. https://doi.org/10.3390/machines11040429
APA StyleLei, Y., Feng, Z., & Ma, C. (2023). Aerodynamic Performance of V8 Octorotor MAV with Different Rotor Configurations in Hover. Machines, 11(4), 429. https://doi.org/10.3390/machines11040429