
A One-Dimensional Convolutional Neural Network-Based Method for Diagnosis of Tooth Root Cracks in Asymmetric Spur Gear Pairs



Abstract
1. Introduction
2. Materials and Methods
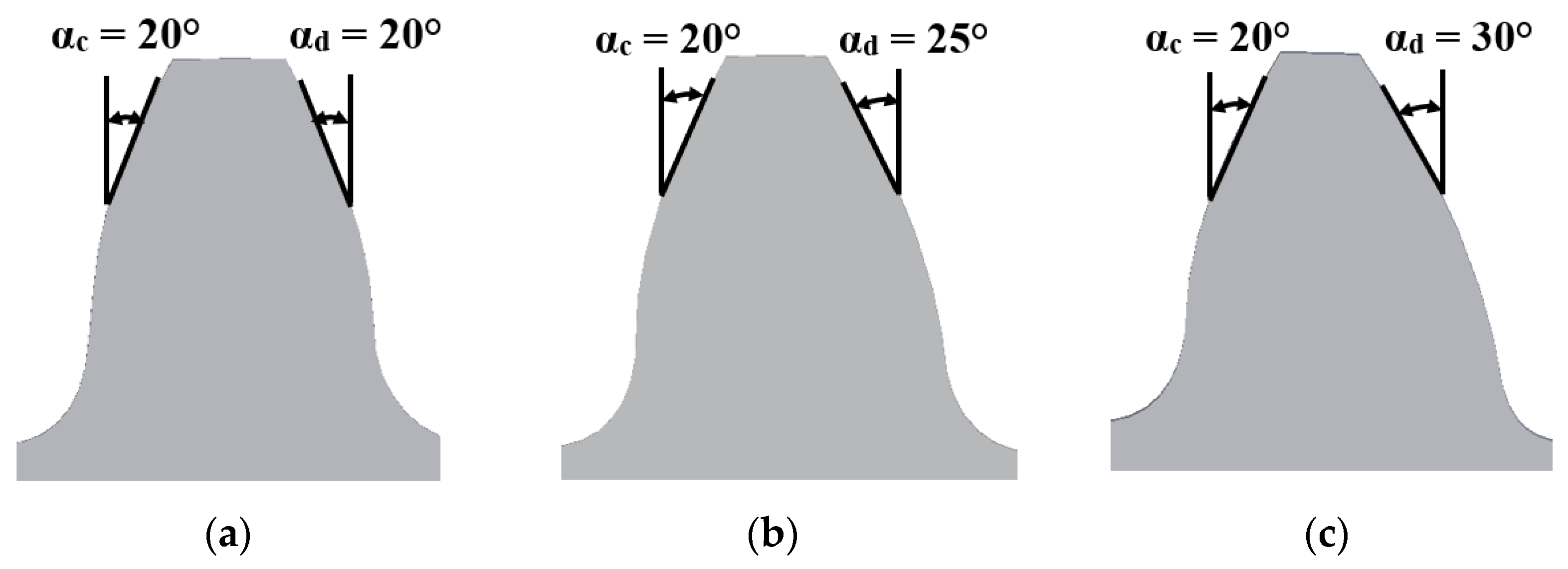
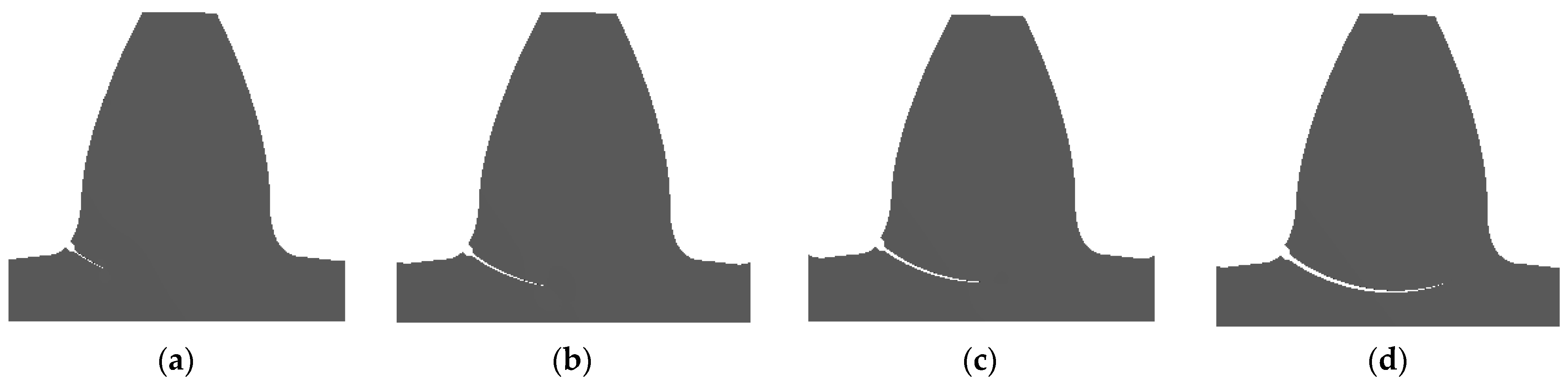
2.1. Identification of Crack Propagation Paths
2.2. Single-Tooth and Meshing Stiffness Calculation
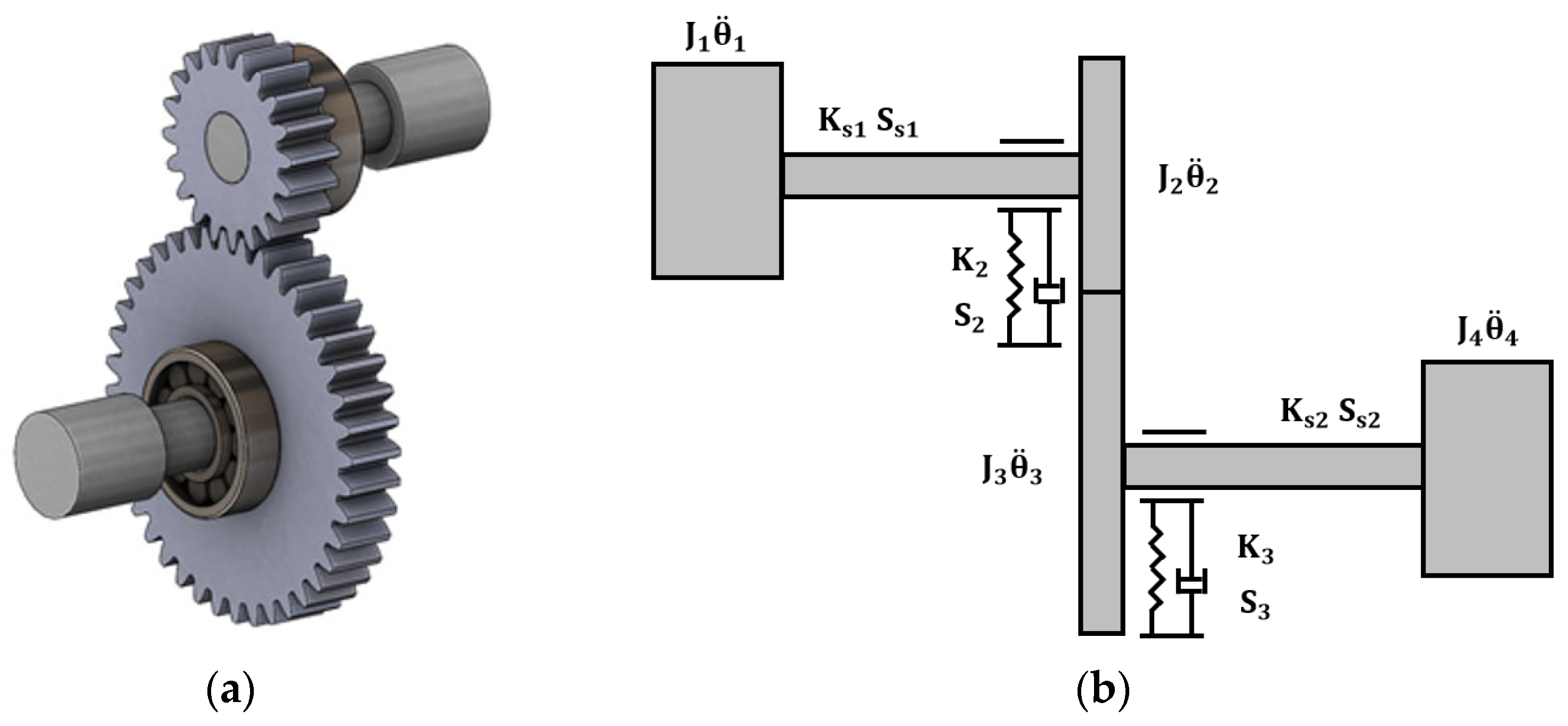
2.3. Dynamic Modeling of a One-Stage Spur Gear Transmission
2.4. Signal-to-Noise Ratio
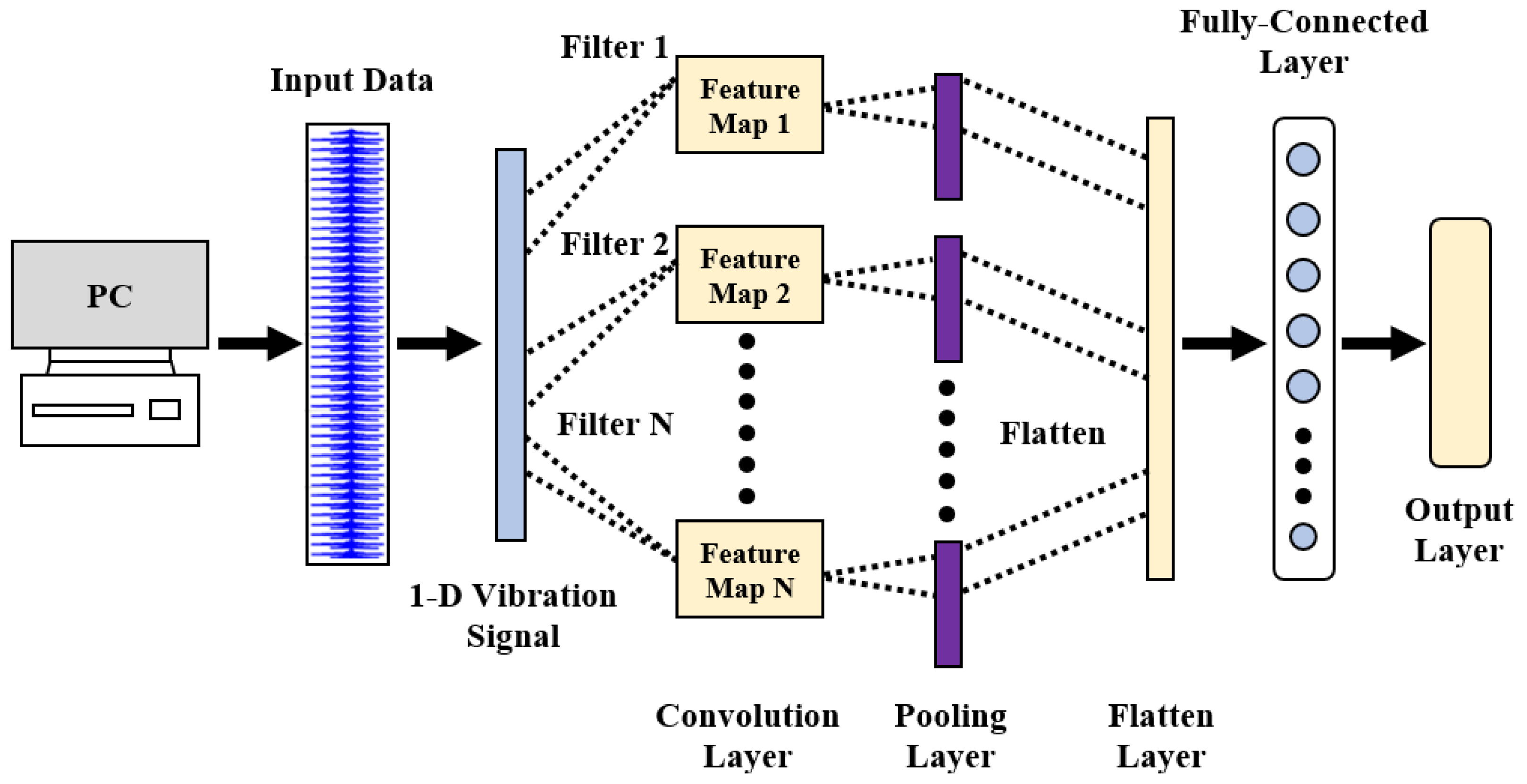
2.5. Convolutional Neural Network Architecture
2.6. Statistical Indicators
3. Results
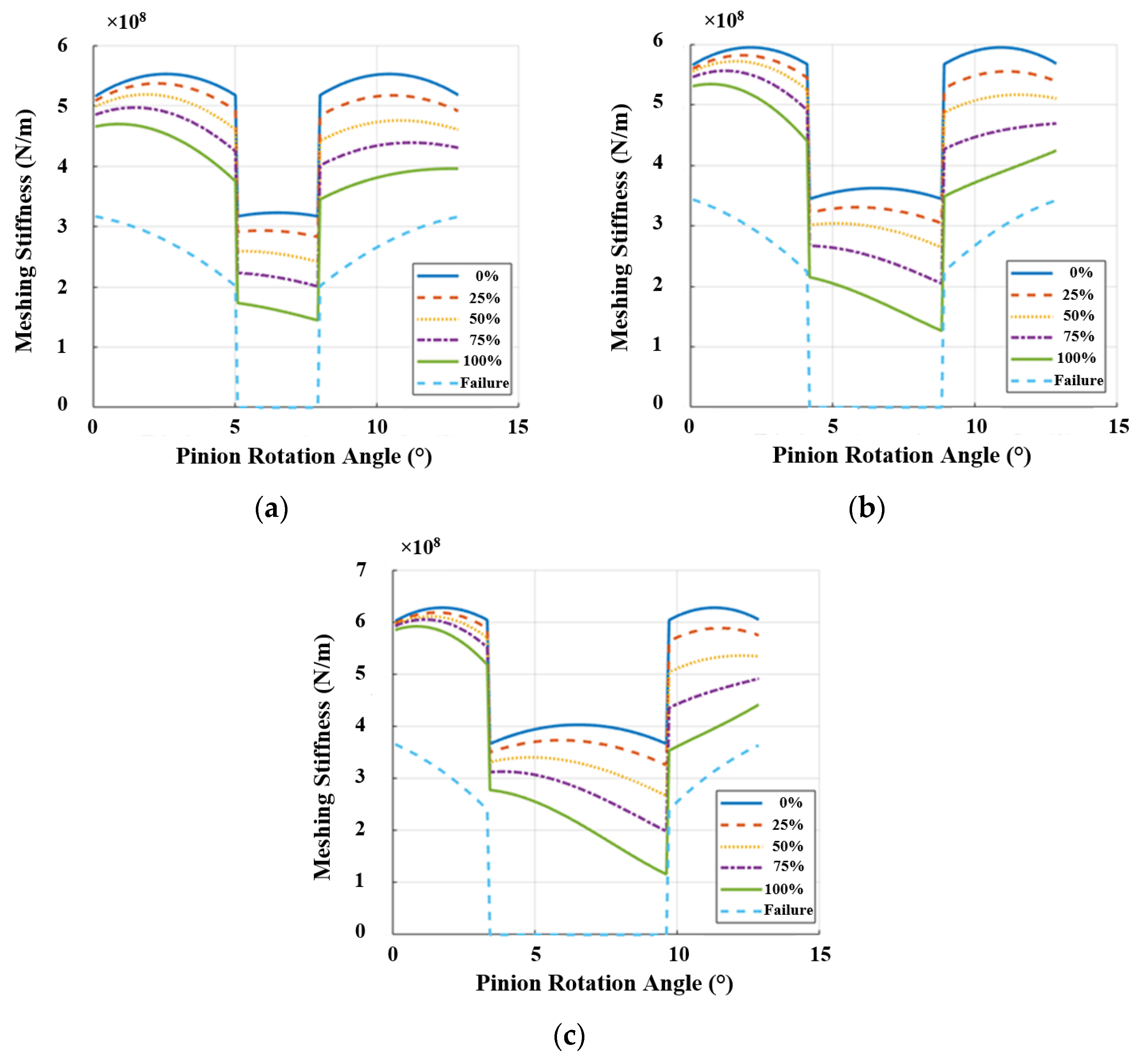
- The TVMS of a spur gear pair decreases in the presence of a tooth crack. In this regard, the reduction in TVMS proportionally enhances as the crack level increases;
- A reduction in TVMS decreases as the DSPA increases. This finding is also compatible with the available literature [9];
- The single-tooth contact region enlarges as DSPA increases, resulting in longer load transmission with a single gear pair.
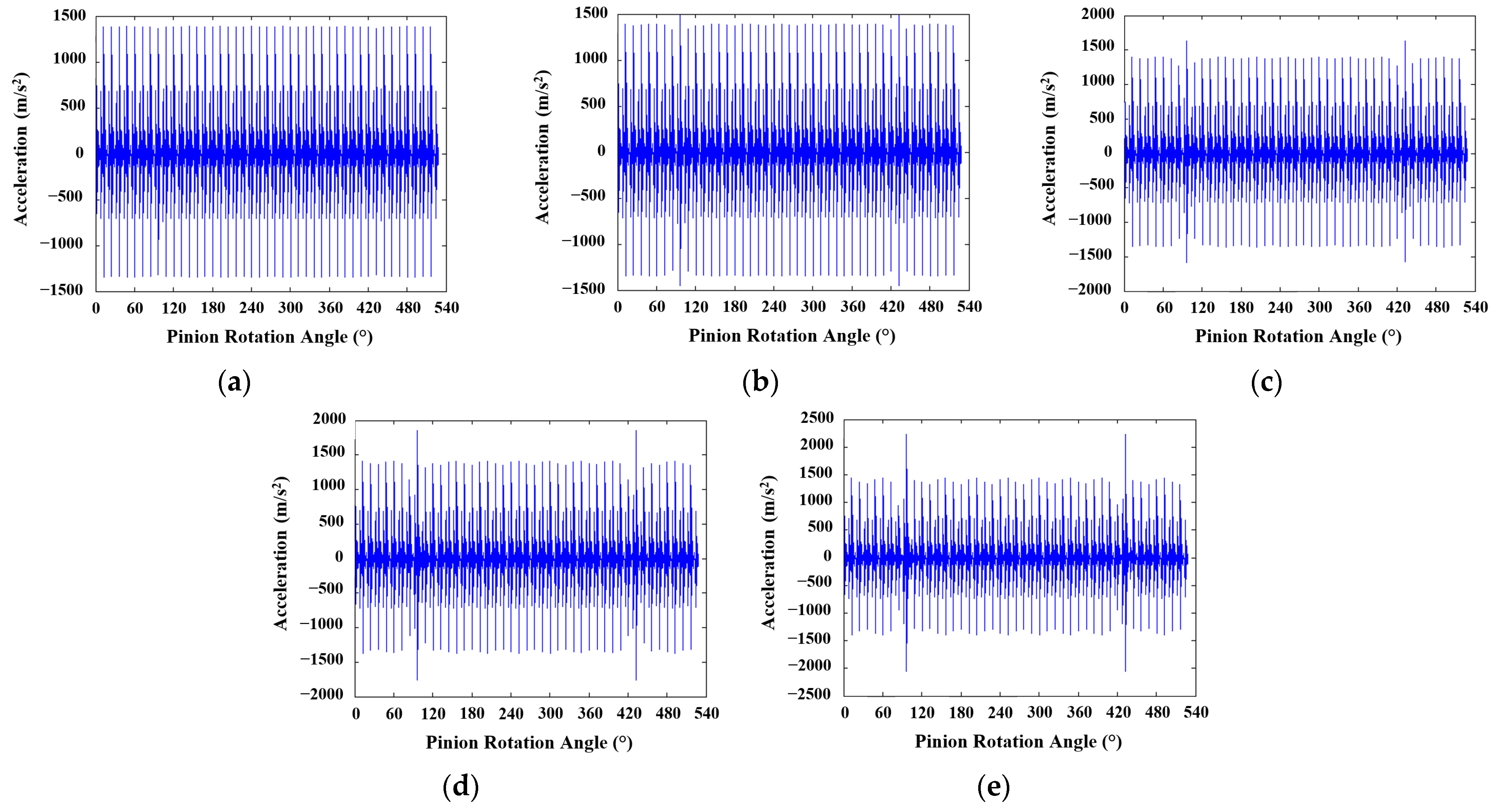
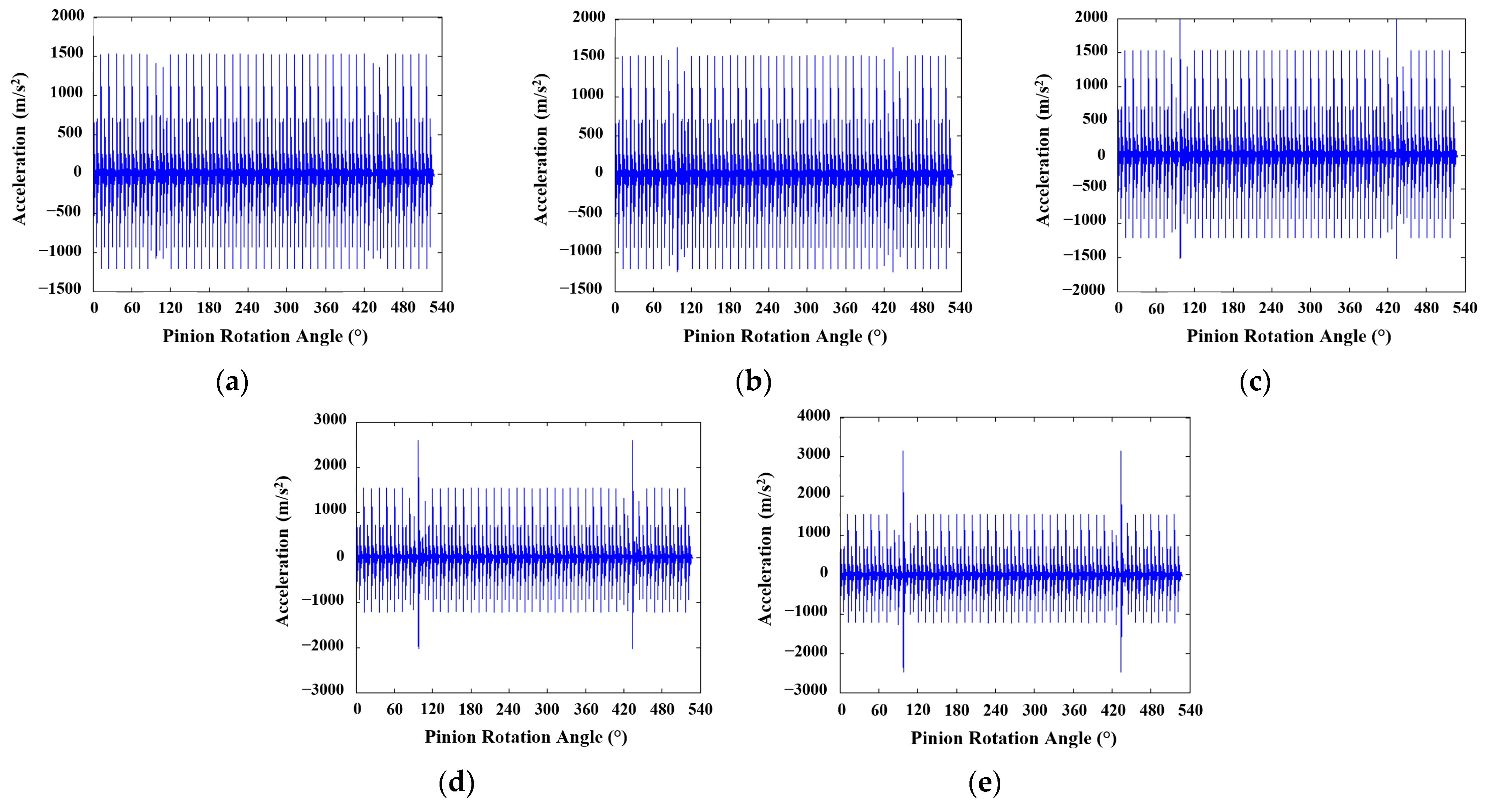
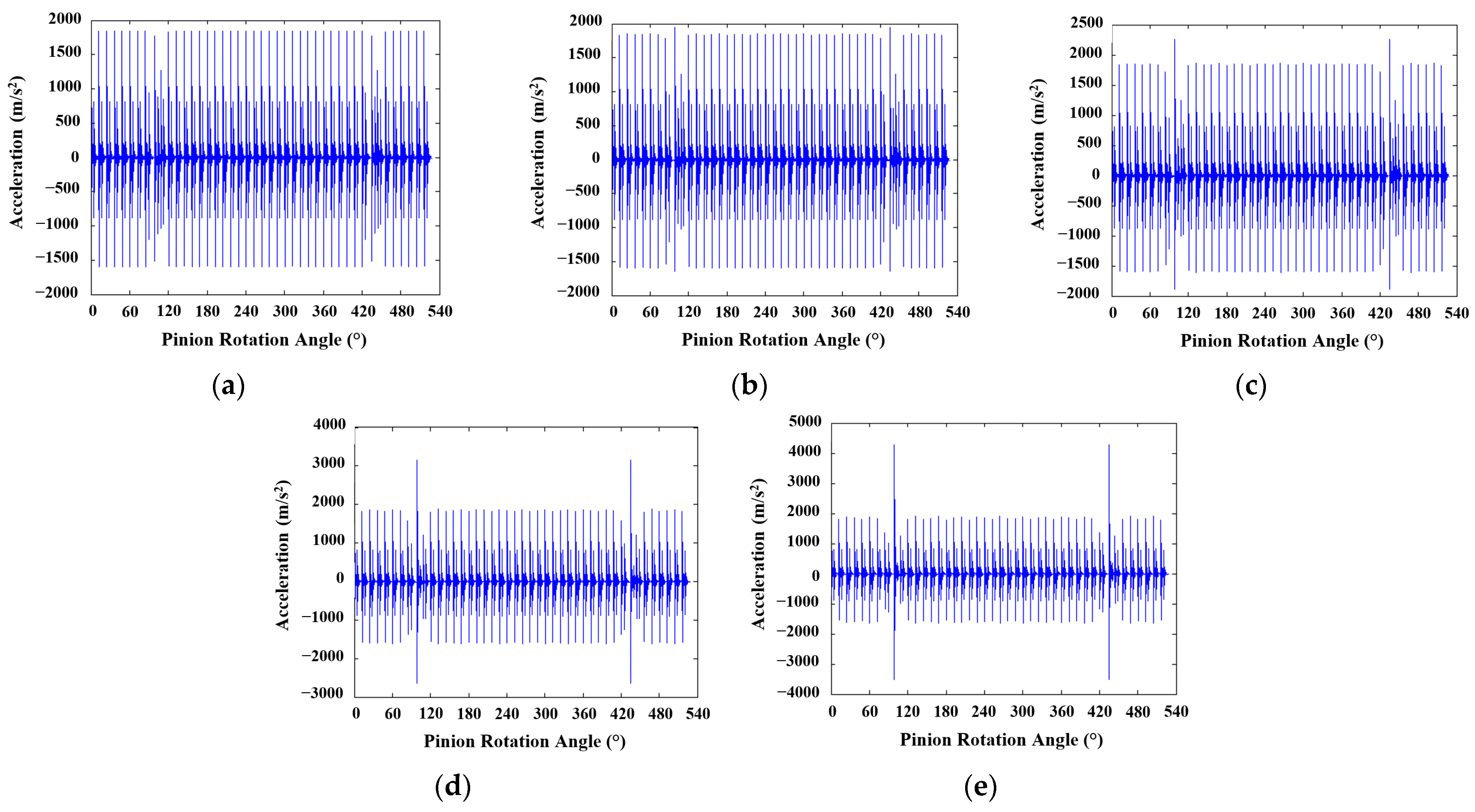
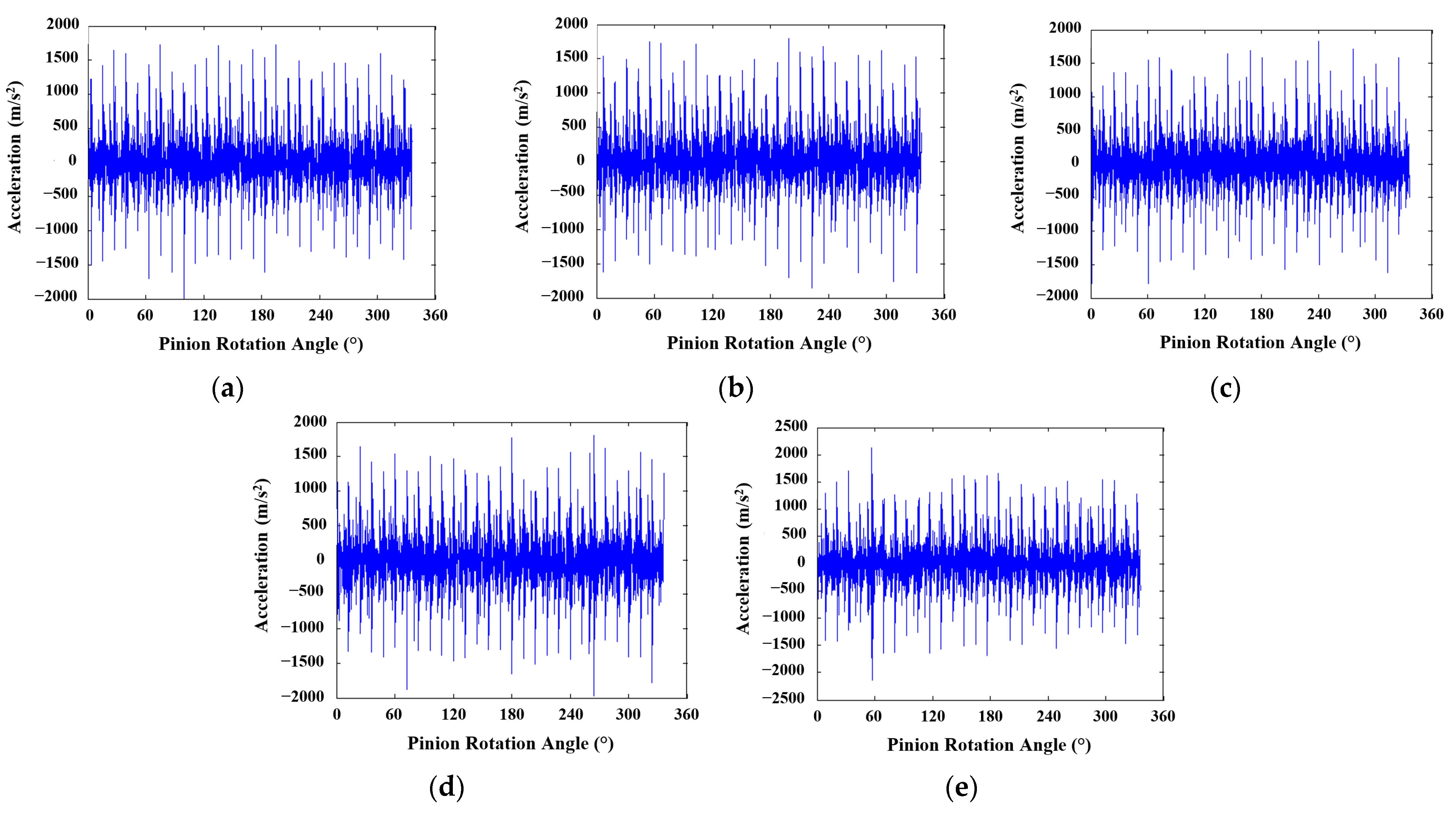
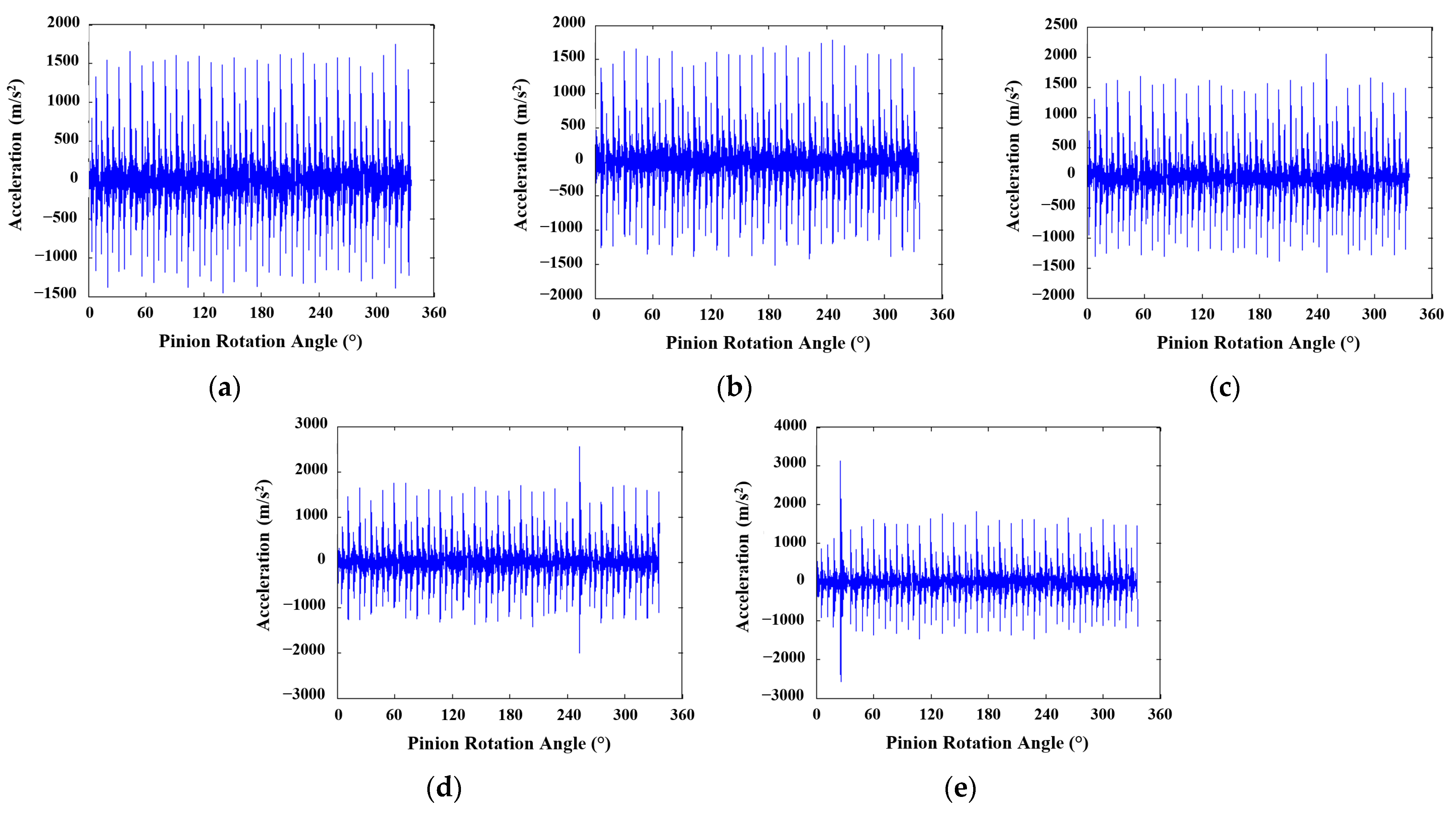
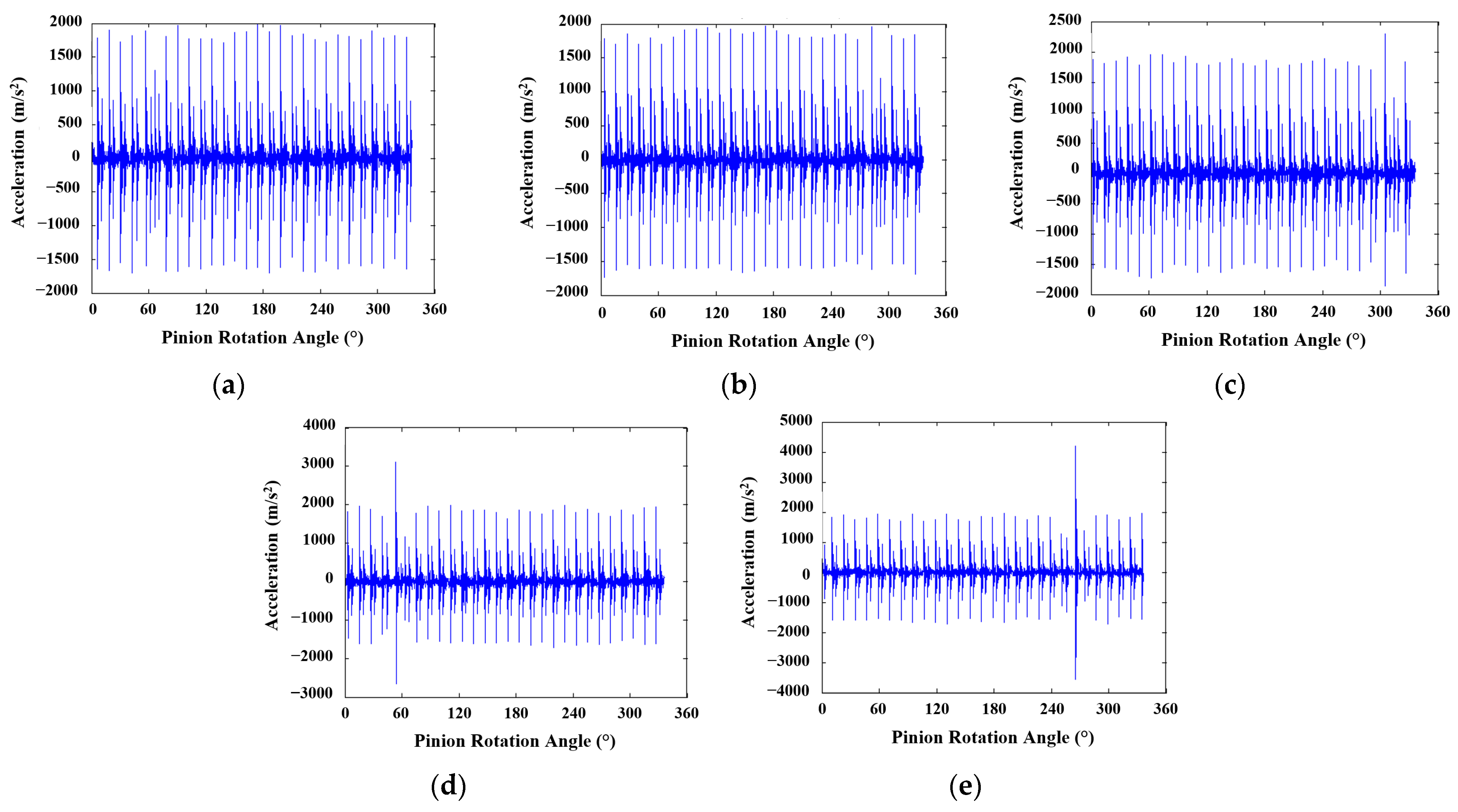
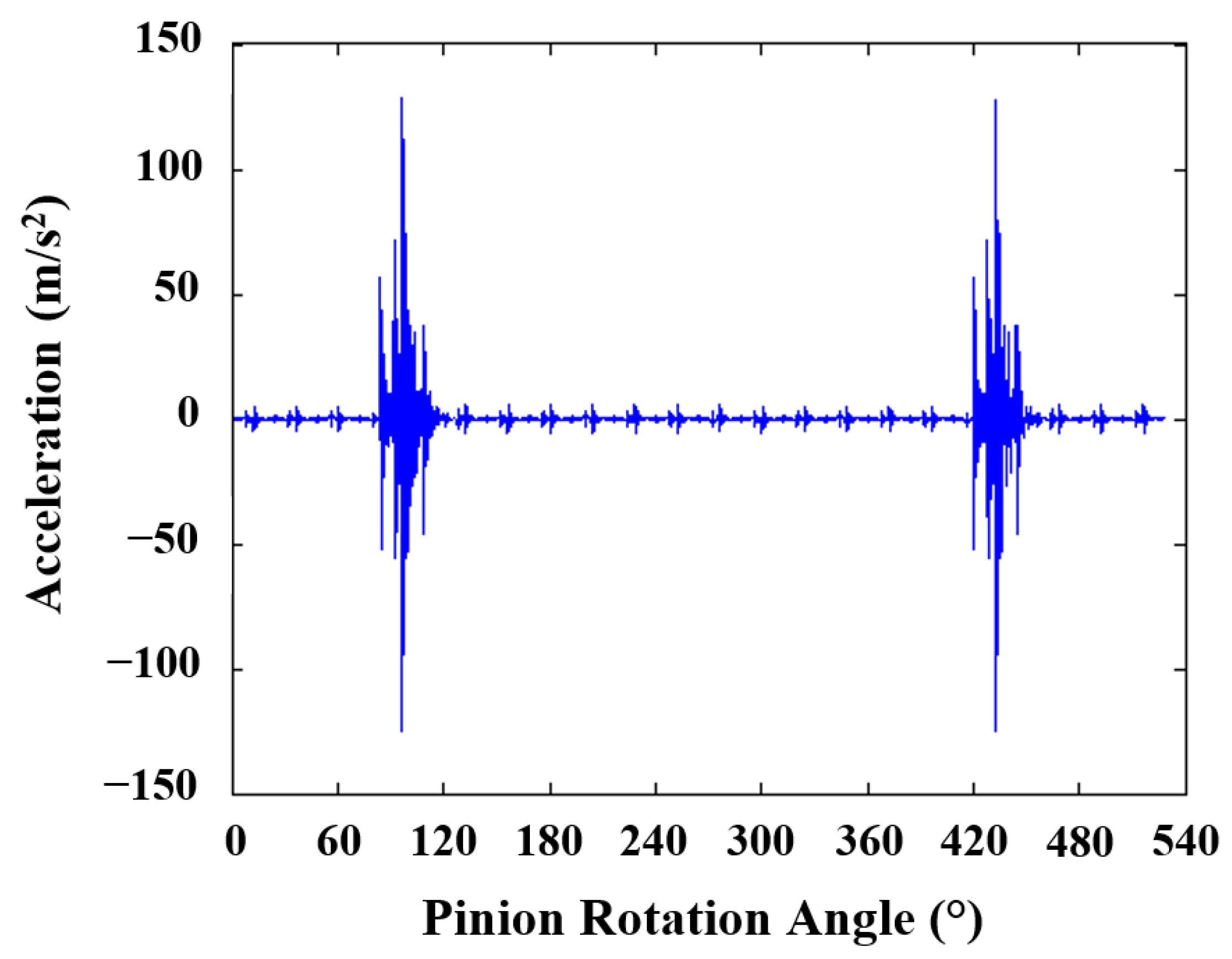
- In the presence of a tooth crack, a peak (i.e., anomaly) in the vibration response is observed as the faulty tooth enters the meshing;
- In this regard, the impact of tooth cracks on the vibration signals becomes more pronounced as DSPA increases. This finding holds promise in terms of detecting tooth cracks more easily through a DL-based method.
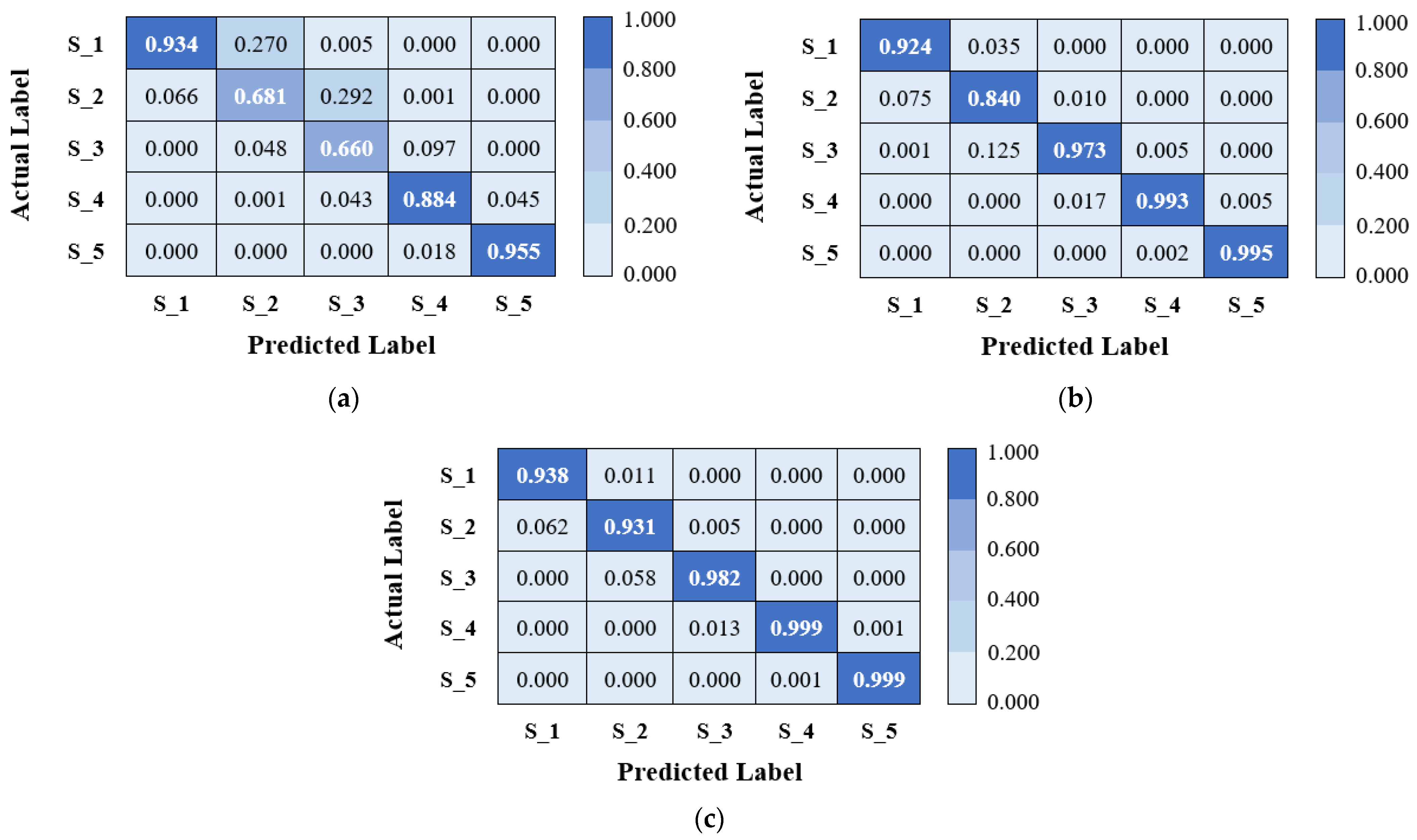
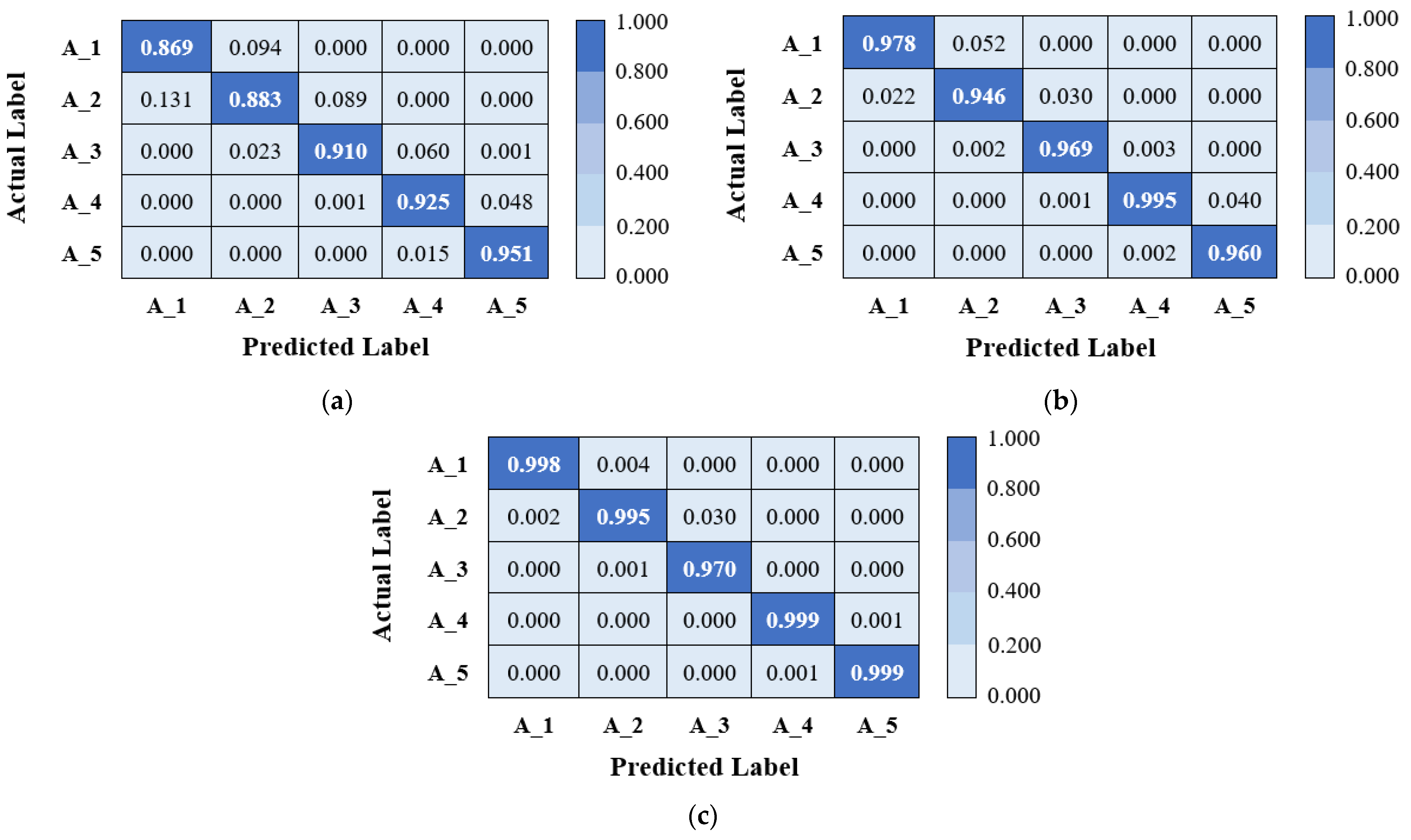
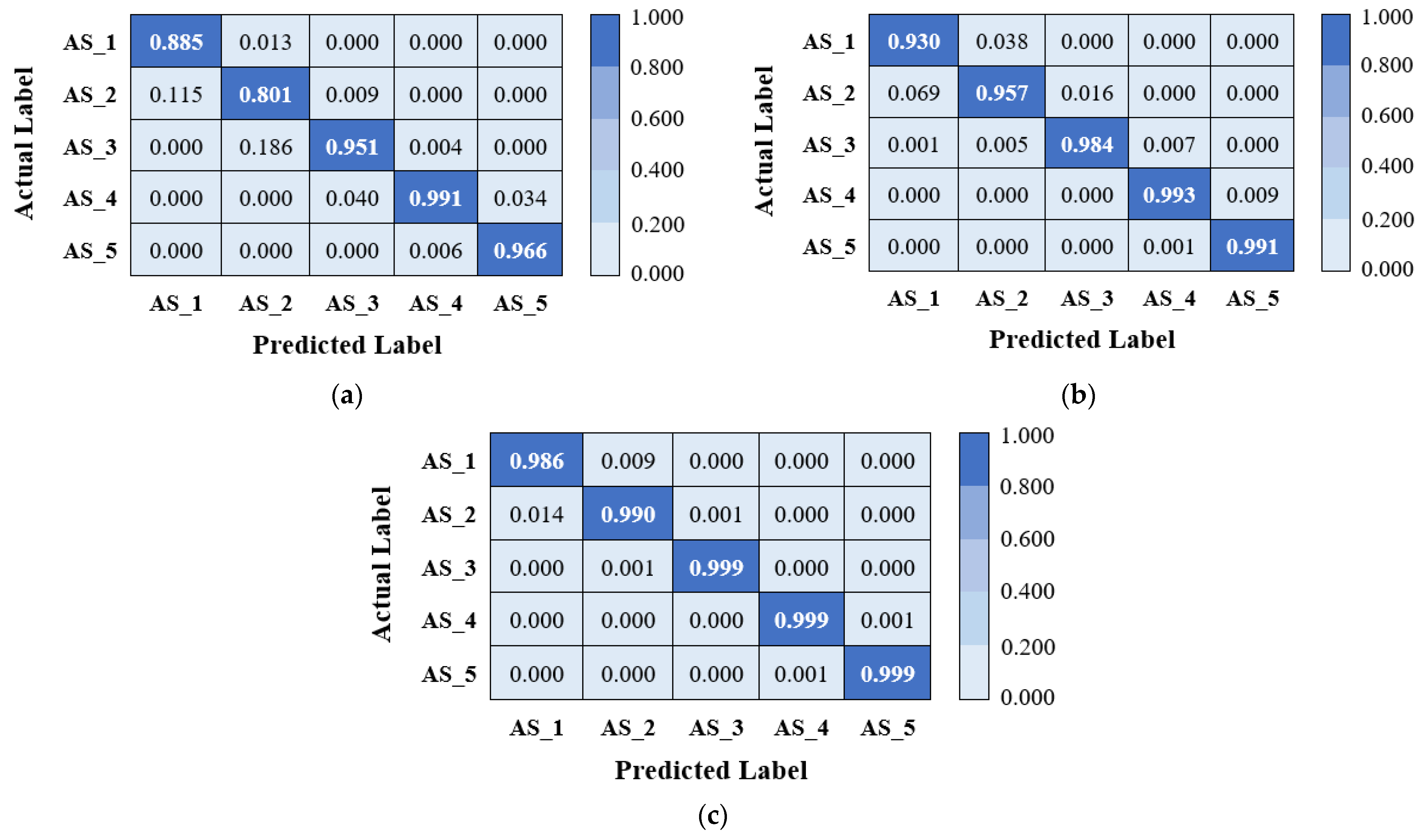
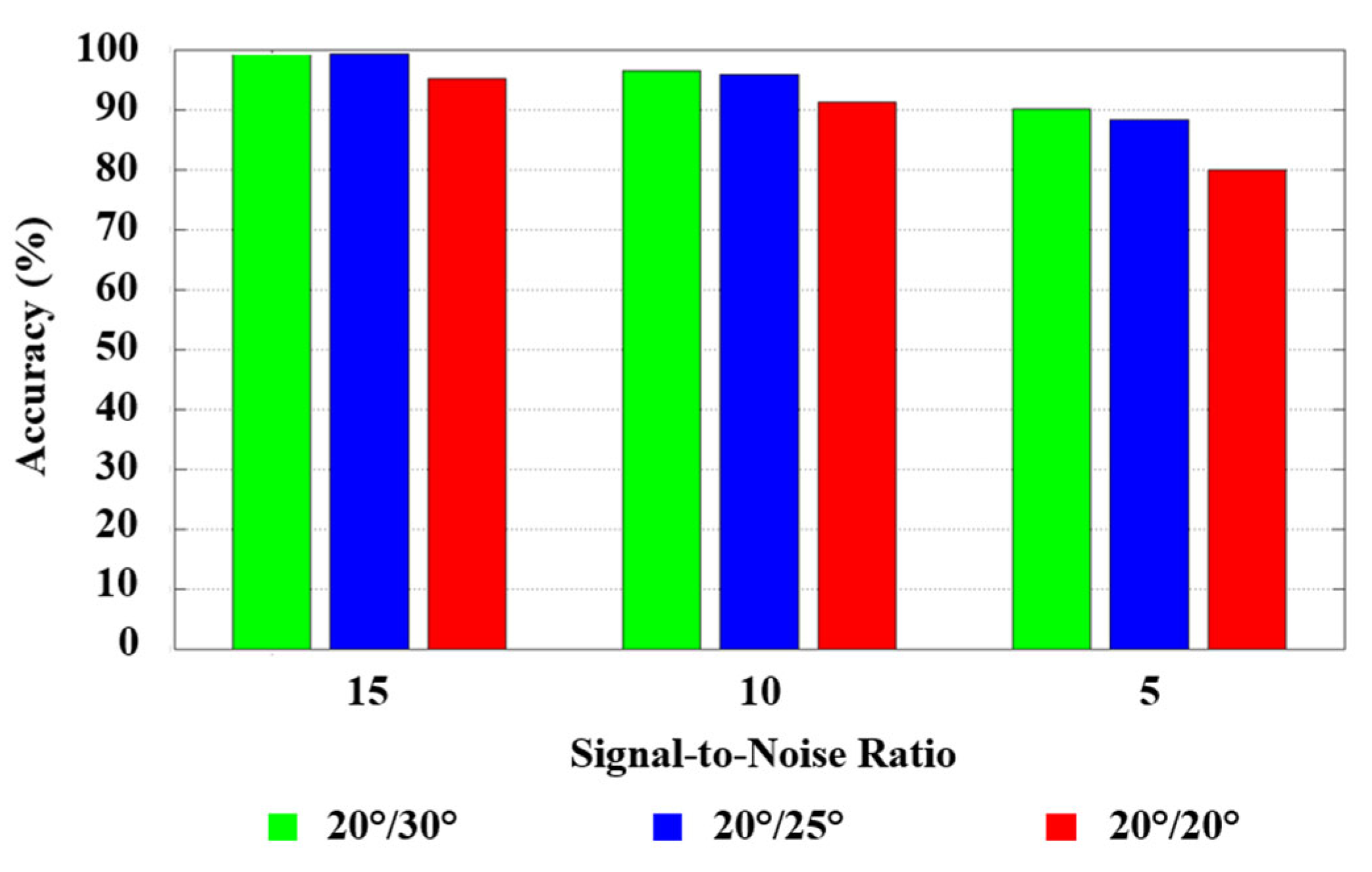
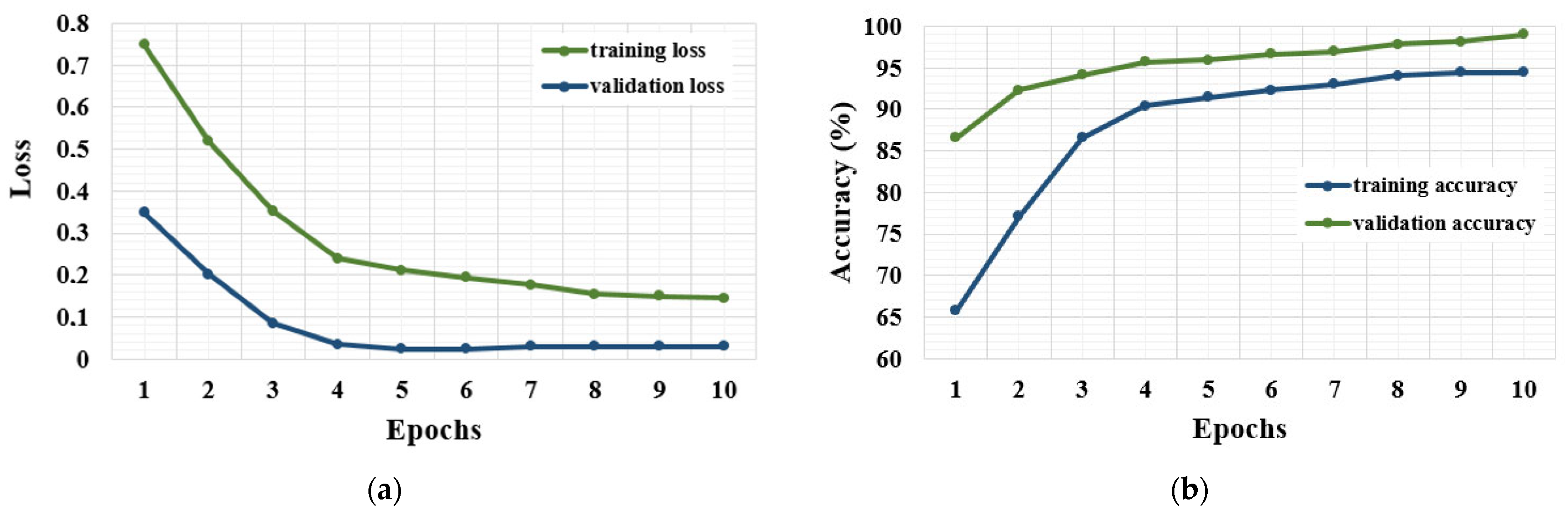
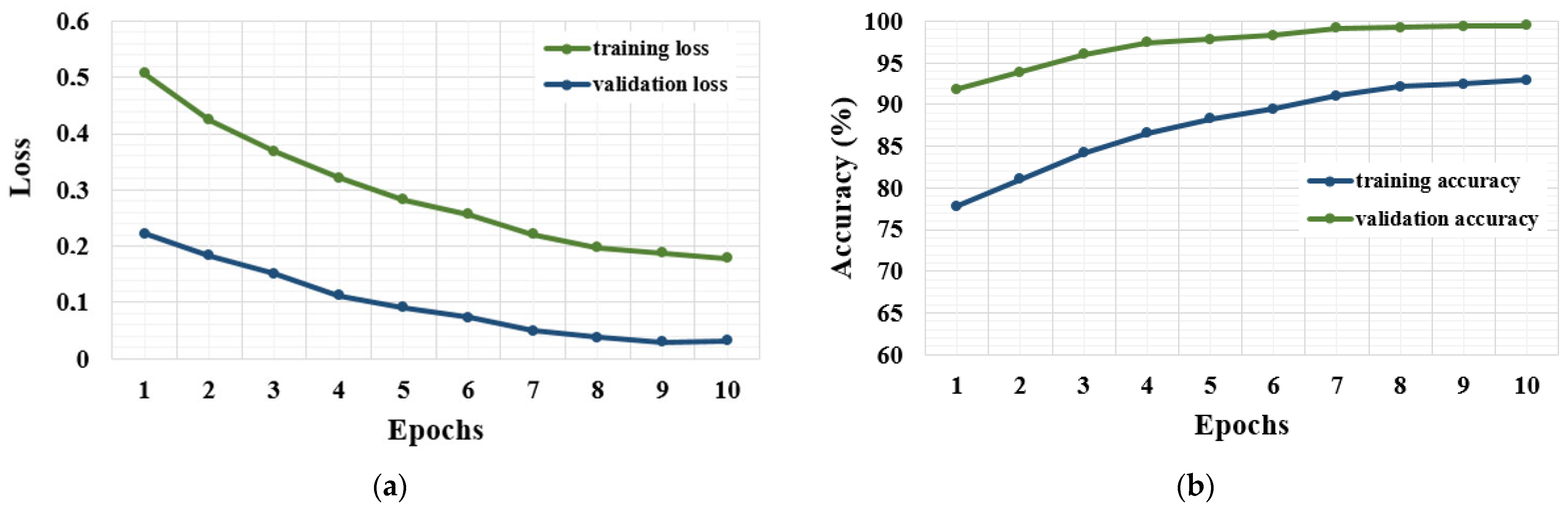
- As expected, the classification accuracy decreased in all scenarios identified within the scope of research work as the noise level increased, meaning SNR value decreased (see Equation (8));
- In all cases, the highest accuracy was obtained for SNR 15 (i.e., lowest noise level), while the lowest accuracy rates were obtained for SNR 5 (i.e., highest noise level);
- It was observed that the average classification accuracy rates were improved as DSPA increased. This finding confirms the hypothesis that tooth asymmetry could provide an advantage in detecting tooth cracks more easily;
- The average classification accuracy could be improved by 12.8% by using an asymmetric (20°/30°) tooth profile instead of a standard (20°/20°) design for high noise levels (i.e., SNR = 5);
- Based on the calculated SD values, it was observed that the variability between the tests performed for each condition was small and acceptable, and the findings were consistent.
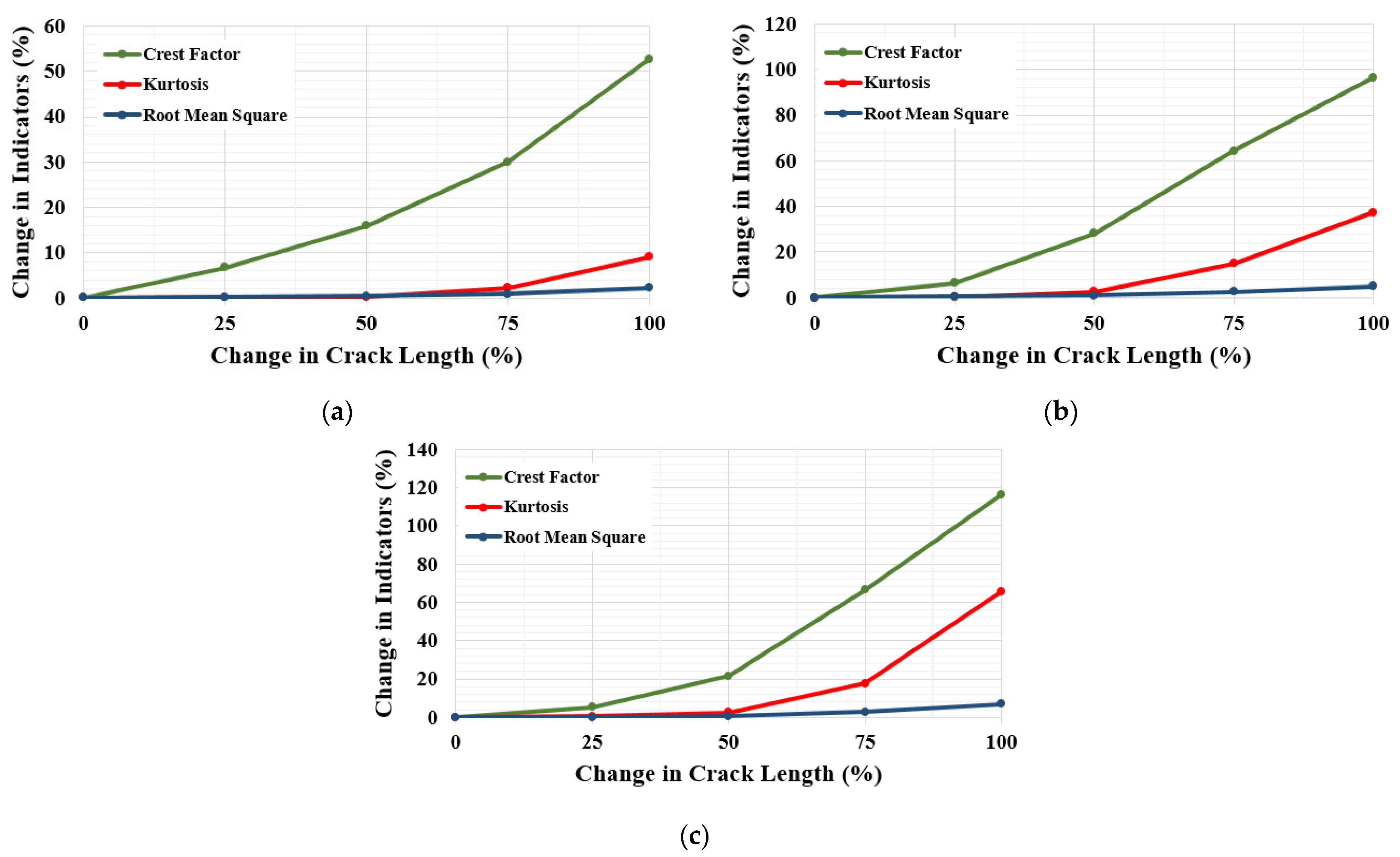
- The statistical indicator values increase as the crack level is proportionally enhanced for all tooth profiles evaluated within the present study;
- The sensitivity of RMS and kurtosis is relatively low for low crack levels, meaning 25% and 50% crack levels. In this regard, the kurtosis performed well compared to RMS for relatively high crack levels;
- The percentage change in statistical indicators was increased as the DSPA increased for all crack levels. This finding supports the proposed DL-based model’s results that the tooth asymmetry could yield an advantage in detecting tooth cracks more easily;
- The percentage change in the most sensitive indicator, i.e., CF, reached 52.75%, 96.4%, and 116.27% for DSPAs of 20°, 25°, and 30°, respectively, for 100% crack level.
Fault Classification with Residual Signals
4. Discussion
- The meshing stiffness of standard and asymmetric spur gear pairs was evaluated comparatively in the case of a tooth crack fault. As a result, it was observed that as DSPA increased, the reduction in TVMS decreased. This finding revealed the superiority of asymmetric tooth profiles over the standard (symmetric) designs in terms of gear meshing stiffness;
- It was demonstrated that the effect of faults (i.e., tooth crack) on vibration signals became more pronounced as DSPA increased;
- The available literature only used ML- or DL-based methods in order to detect faults in gears with a symmetric tooth profile. However, no research study in the literature examined whether an advantage is provided by using an asymmetric tooth profile to facilitate fault detection with ML- or DL-based approaches to add to the improvements it affords in terms of impact resistance, bending strength, and fatigue life. The present research work aims to explore the impact of DSPA (i.e., tooth asymmetry) on a DL-based algorithm’s fault classification accuracy for the first time and make a novel contribution to knowledge in this field;
- The findings demonstrated that the classification accuracy could be improved by up to 12.8% as DSPA increased from 20° to 30°. This result revealed that an advantage could be provided in detecting tooth cracks by using an asymmetric tooth profile instead of a symmetric design. No similar study has been reported using a DL-based approach for fault detection in asymmetric spur gear pairs and whether tooth asymmetry provides an advantage in detecting tooth cracks more easily in the literature.
5. Conclusions
- It was observed that the average classification accuracy was improved for all cases identified within the scope of research work as the DSPA increased;
- In this regard, it was recorded that the model’s ability to classify different crack levels improved by up to circa 12.8% by using an asymmetric (20°/30°) tooth profile instead of a symmetric (20°/20°) design for an SNR of 5;
- The statistical indicator variations also support the hypothesis that tooth asymmetry could facilitate the early fault diagnosis task.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| z | Number of teeth |
| mn | Module |
| ha | Addendum |
| hf | Dedendum |
| αd | DSPA |
| αc | Coast side pressure angle |
| ρ | Tooth fillet radius |
| bt | Face width |
| J1, J2, J3, J4 | Mass moment of inertia of the motor, pinion, gear, and the load |
| θ1, θ2, θ3, θ4 | The rotational angle of the motor, pinion, gear, and the load |
| Ss1, Ss2 | Damping coefficients of shafts |
| Ks1, Ks2 | Stiffness of the shafts |
| m2, m3 | Masses of the pinion and gear |
| y2, y3 | Displacement of the bearings |
| S2, S3 | The damping coefficient of the bearings |
| K2, K3 | Stiffness of the bearings |
| Tin, Tout | Input and output torques |
| W | Dynamic load between the gear pairs |
| rb2, rb3 | Base circles of pinion and gear |
| Cgt | Time-varying damping between the gear pairs |
| Kgt | TVMS of gear pairs |
| ѯ1, ѯ2 | Damping ratios of shafts |
| ѯt | The damping ratio of the meshing gears |
| Psignal | Signal power |
| Pnoise | Noise power |
| k1 | Extracted features by the ith convolution kernel |
| b | The bias of the kernel |
| w | Weight of the kernel |
| m | Number of data points |
| rx | One-dimensional input |
| tl(h, u) | uth neuron of the hth feature map in the ith layer |
| j | jth pooling kernel |
| v | Convolutional kernel’s width |
| TE | Transmission Error |
| CM | Condition Monitoring |
| TVMS | Time-Varying Mesh Stiffness |
| FE | Finite Element |
| DOF | Degree-of-Freedom |
| ML | Machine Learning |
| DL | Deep Learning |
| CNN | Convolutional Neural Network |
| 1-D CNN | One-Dimensional Convolutional Neural Network |
| DSPA | Drive Side Pressure Angle |
| SNR | Signal-to-Noise Ratio |
| ODE | Ordinary Differential Equation |
| FC | Fully Connected |
| ReLu | Rectified Linear Unit |
| RMS | Root Mean Square |
| CF | Crest Factor |
| SD | Standard Deviation |
References
- Kapelevich, A.L. Asymmetric Gearing, 1st ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ma, J.; Liu, T.; Zha, C.; Song, L. Simulation research on the time-varying meshing stiffness and vibration response in micro-cracks in gears under variable tooth shape parameters. Appl. Sci. 2019, 9, 1512. [Google Scholar] [CrossRef]
- Yu, Y.; Shi, J.; Shen, C.; Luo, Y.; Wang, T.; Zhu, Z. Dynamic modelling of gearbox with multiple localized defects and its coupled vibration analysis. Mech. Syst. Signal Process. 2022, 180, 109469. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, J.; Hu, N.; Shen, G.; Li, Y.; Zhang, L. Research on the time-varying mesh stiffness method and dynamic analysis of cracked spur gear system considering the crack position. J. Sound Vib. 2023, 548, 117505. [Google Scholar] [CrossRef]
- Liang, X. Dynamics Based Vibration Signal Modeling and Fault Detection of Planetary Gearboxes. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2016. [Google Scholar]
- Qu, Y.; He, D.; Yoon, J.; Van Hecke, B.; Bechhoefer, E.; Zhu, J. Gearbox tooth cut fault diagnostics using acoustic emission and vibration sensors—A comparative study. Sensors 2014, 14, 1372–1393. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Choi, J.-H. Convolutional neural network for gear fault diagnosis based on signal segmentation approach. Struct. Health Monit. 2019, 18, 1401–1415. [Google Scholar] [CrossRef]
- Doğan, O.; Yuce, C.; Karpat, F. Effects of rim thickness and drive side pressure angle on gear tooth root stress and fatigue crack propagation life. Eng. Fail. Anal. 2021, 122, 105260. [Google Scholar] [CrossRef]
- Doğan, O.; Karpat, F. Crack detection for spur gears with asymmetric teeth based on the dynamic transmission error. Mech. Mach. Theory 2019, 133, 417–431. [Google Scholar] [CrossRef]
- Chen, T.; Wang, Y.; Chen, Z. A novel distribution model of multiple teeth pits for evaluating time-varying mesh stiffness of external spur gears. Mech. Syst. Signal Process. 2019, 129, 479–501. [Google Scholar] [CrossRef]
- Yu, W.; Shao, Y.; Mechefske, C.K. The effects of spur gear tooth spatial crack propagation on mesh stiffness. Eng. Fail. Anal. 2015, 54, 103–119. [Google Scholar] [CrossRef]
- Mohammed, O.D.; Rantatalo, M.; Aidanpää, J.-O.; Kumar, U. Vibration signal analysis for gear fault diagnosis with various crack progression scenarios. Mech. Syst. Signal Process. 2013, 41, 176–195. [Google Scholar] [CrossRef]
- Chaari, F.; Fakhfakh, T.; Haddar, M. Analytical modelling of spur gear tooth crack and influence on gearmesh stiffness. Eur. J. Mech. A Solids 2009, 28, 461–468. [Google Scholar] [CrossRef]
- Fernandez del Rincon, A.; Viadero, F.; Iglesias, M.; García, P.; de-Juan, A.; Sancibrian, R. A model for the study of meshing stiffness in spur gear transmission. Mech. Mach. Theory 2013, 61, 30–58. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Pandey, M. Analytically evaluating the influence of crack on the mesh stiffness of a planetary gear set. Mech. Mach. Theory 2014, 76, 20–38. [Google Scholar] [CrossRef]
- Yu, X.; Huangfu, Y.; Yang, Y.; Du, M.; He, Q.; Peng, Z. Gear fault diagnosis using gear meshing stiffness identified by gearbox housing vibration signals. Front. Mech. Eng. 2022, 17, 57. [Google Scholar] [CrossRef]
- Mohamed, A.S.; Sassi, S.; Paurobally, M.R. Model-based analysis of spur gears’ dynamic behavior in the presence of multiple cracks. Shock Vib. 2018, 2018, 1913289. [Google Scholar] [CrossRef]
- Wang, X.; Mao, D.; Li, X. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D-CNN network. Meas. J. Int. Meas. Confed. 2021, 173, 108518. [Google Scholar] [CrossRef]
- Gecgel, O. Condition Monitoring of Gearbox Components Using Deep Learning with Simulated Vibration Data. Ph.D. Thesis, Texas Tech University, Lubbock, TX, USA, December 2019. [Google Scholar]
- Howard, I.; Jia, S.; Wang, J. The dynamic modelling of a spur gear in mesh including friction and a crack. Mech. Syst. Signal Process 2001, 15, 831–853. [Google Scholar] [CrossRef]
- Ren, F.; Wang, D.; Shi, G.; Wu, X. Investigation on dynamic characteristics of spur gear transmission system with crack fault. Machines 2022, 10, 664. [Google Scholar] [CrossRef]
- Yang, X.; Zhou, P.; Zuo, M.J.; Tian, Z.; Peng, Z. The effect of time-varying operating condition on the crack induced impulses and its application to gearbox tooth crack diagnosis. Mech. Syst. Signal Process 2023, 188, 110026. [Google Scholar] [CrossRef]
- Xu, L.; Wang, T.; Xie, J.; Yang, J.; Gao, G. A mechanism-based automatic fault diagnosis method for gearboxes. Sensors 2022, 22, 9150. [Google Scholar] [CrossRef]
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A Survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef] [PubMed]
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Umar, A.M.; Linus, O.U.; Arshad, H.; Kazaure, A.A.; Gana, U.; Kiru, M.U. Comprehensive review of artificial neural network applications to pattern recognition. IEEE Access 2019, 7, 158820–158846. [Google Scholar] [CrossRef]
- Sun, W.; Yao, B.; Zeng, N.; Chen, B.; He, Y.; Cao, X.; He, W. An intelligent gear fault diagnosis methodology using a complex wavelet enhanced convolutional neural network. Materials 2017, 10, 790. [Google Scholar] [CrossRef]
- D’Andrea, D.; Risitano, G.; Desiderio, E.; Quintarelli, A.; Milone, D.; Alberti, F. Artificial neural network prediction of the optimal setup parameters of a seven degrees of freedom mathematical model of a race car: IndyCar case study. Vehicles 2021, 3, 300–329. [Google Scholar] [CrossRef]
- Carputo, F.; D’Andrea, D.; Risitano, G.; Sakhnevych, A.; Santonocito, D.; Farroni, F. A neural-network-based methodology for the evaluation of the center of gravity of a motorcycle rider. Vehicles 2021, 3, 377–389. [Google Scholar] [CrossRef]
- Yu, H.; Qin, C.; Tao, J.; Liu, C.; Liu, Q. A multi-channel decoupled deep neural network for tunnel boring machine torque and thrust prediction. Tunn. Undergr. Space Technol. 2023, 133, 104949. [Google Scholar] [CrossRef]
- Liu, C.; Cheng, G.; Chen, X.; Pang, Y. Planetary gear feature extraction and fault diagnosis method based VMD and CNN. Sensors 2018, 18, 1523. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Lin, M.-C.; Han, P.-Y.; Fan, Y.-H.; Li, C.-H.G. Development of compound fault diagnosis system for gearbox based on convolutional neural network. Sensors 2020, 20, 6169. [Google Scholar] [CrossRef]
- Kapelevich, A. Geometry and design of involute spur gears with asymmetric teeth. Mech. Mach. Theory 2000, 35, 117–130. [Google Scholar] [CrossRef]
- Shuai, M.; Shuai, M.; Guoguang, J.; Jiabei, G.; Ting, Z.; Shengping, Z. Design principle and modeling method of asymmetric involute internal helical gears. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 244–255. [Google Scholar] [CrossRef]
- Kalay, O.C.; Doğan, O.; Yılmaz, T.G.; Yüce, C.; Karpat, F. A comparative experimental study on the impact strength of standard and asymmetric involute spur gears. Meas. J. Int. Meas. Confed. 2021, 172, 108950. [Google Scholar] [CrossRef]
- Karpat, F.; Ekwaro-Osire, S.; Cavdar, K.; Babalik, F.C. Dynamic analysis of involute spur gears with asymmetric teeth. Int. J. Mech. Sci. 2008, 50, 1598–1610. [Google Scholar] [CrossRef]
- Mo, S.; Li, Y.; Luo, B.; Wang, L.; Bao, H.; Cen, G.; Huang, Y. Research on the meshing characteristics of asymmetric gears considering the tooth profile deviation. Mech. Mach. Theory 2022, 175, 104926. [Google Scholar] [CrossRef]
- Lewicki, D.G. Crack Propagation Studies to Determine Benign or Catastrophic Failure Modes for Aerospace Thin-Rim Gears. Ph.D. Thesis, Case Western Reserve University, Cleveland, OH, USA, August 1995. [Google Scholar]
- Pedersen, N.L. Improving bending stress in spur gears using asymmetric gears and shape optimization. Mech. Mach. Theory 2010, 45, 1707–1720. [Google Scholar] [CrossRef]
- Karpat, F.; Dogan, O.; Yilmaz, T.; Yuce, C.; Kalay, O.C.; Karpat, E.; Kopmaz, O. Effects of drive side pressure angle on gear fatigue crack propagation life for spur gears with symmetric and asymmetric teeth. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Salt Lake City, UT, USA, 11–14 November 2019. [Google Scholar] [CrossRef]
- Doğan, O.; Kalay, O.C.; Karpat, F. Influence of tooth root cracks on the mesh stiffness of asymmetric spur gear pair with different backup ratios. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 717–731. [Google Scholar] [CrossRef]
- Kuang, J.-H.; Lin, A.D. The effect of tooth wear on the vibration spectrum of a spur gear pair. J. Vib. Acoust. 2001, 123, 311–317. [Google Scholar] [CrossRef]
- Yoon, K.Y.; Rao, S.S. Dynamic load analysis of spur gears using a new tooth profile. J. Mech. Des. 1996, 118, 1–6. [Google Scholar] [CrossRef]
- Ozguven, H.N. A non-linear mathematical model for dynamic analysis of spur gears including shaft and bearing dynamics. J. Sound Vib. 1991, 145, 239–260. [Google Scholar] [CrossRef]
- Lin, H.H. Computer Aided Design and Analysis of Spur Gear Dynamics. Ph.D. Thesis, University of Cincinnati, Cincinnati, OH, USA, July 1985. [Google Scholar]
- Yang, Y.; Xia, W.; Han, J.; Song, Y.; Wang, J.; Dai, Y. Vibration analysis for tooth crack detection in a spur gear system with clearance nonlinearity. Int. J. Mech. Sci. 2019, 157–158, 648–661. [Google Scholar] [CrossRef]
- Yang, X. Dynamics-Guided Vibration Signal Analysis for Fixed-Axis Gearbox Fault Diagnosis. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2022. [Google Scholar]
- Cheng, J.; Yang, Y.; Li, X.; Pan, H.; Cheng, J. An early fault diagnosis method of gear based on improved symplectic geometry mode decomposition. Meas. J. Int. Meas. Confed. 2020, 151, 107140. [Google Scholar] [CrossRef]
- Ravikumar, K.N.; Yadav, A.; Kumar, H.; Gangadharan, K.V.; Narasimhadhan, A.V. Gearbox fault diagnosis based on multi-scale deep residual learning and stacked LSTM model. Meas. J. Int. Meas. Confed. 2021, 186, 110099. [Google Scholar] [CrossRef]
- Yuan, Y.; Ge, Z.; Su, X.; Guo, X.; Suo, T.; Liu, Y.; Yu, Q. Crack length measurement using convolutional neural networks and image processing. Sensors 2021, 21, 5894. [Google Scholar] [CrossRef] [PubMed]
- Mohammed, S.A.; Ghazaly, N.M.; Abdo, J. Fault diagnosis of crack on gearbox using vibration-based approaches. Symmetry 2022, 14, 417. [Google Scholar] [CrossRef]
- Wang, H.; Yang, R.; Xiang, J. Numerical simulation of gears for fault detection using artificial intelligence models. Meas. J. Int. Meas. Confed. 2022, 203, 111898. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Entity |
|---|---|---|
| Module (mn) | mm | 3.175 |
| Number of Teeth (z) | 28 | |
| Addendum (ha) | mm | 1 × mn |
| Dedendum (hf) | mm | 1.352 × mn |
| Coast Side Pressure Angle (αc) | deg | 20° |
| DSPA (αd) | deg | 20°/25°/30° |
| Tooth Fillet Radius (ρ) | mm | 0.1 × mn |
| Face Width (bt) | mm | 1 |
| Material | AISI 9310 | |
| Poisson Ratio | 0.3 | |
| Young’s Modulus | N/mm2 | 206,000 |
| Parameter | Unit | Entity |
|---|---|---|
| Power | kW | 10 |
| Pinion Speed | rpm | 1200 |
| Face Width | mm | 25.4 |
| Mass of Pinion and Gear | kg | 0.9918 |
| Mass Moment of Inertias (J2 and J3) | kgm2 | 0.0017 |
| Mass Moment of Inertias (J1 and J4) | kgm2 | 0.0052 |
| Shear Modulus | N/mm2 | 79,300 |
| Shaft Lengths | m | 0.3 |
| Shafts Stiffness | Nm/rad | 10,897 |
| Shafts Damping | Nms/rad | 0.0752 |
| ѯ1 and ѯ2 | 0.01 | |
| ѯt | 0.1 | |
| Bearing Stiffness | N/m | 8 × 109 |
| Bearing Damping | Ns/m | 5000 |
| Layer (Type) | Output Shape | Param |
|---|---|---|
| conv1D (Conv1D) | (None, 128, 4) | 8 |
| max_pooling1D (MaxPooling1D) | (None, 64, 4) | 0 |
| conv1D_1 (Conv1D) | (None, 64, 4) | 20 |
| max_pooling1D (MaxPooling1D) | (None, 32, 4) | 0 |
| dropout (Dropout) | (None, 32, 4) | 0 |
| flatten (Flatten) | (None, 128) | 0 |
| dense (Dense) | (None, 256) | 33,024 |
| dense_1 (Dense) | (None, 128) | 32,896 |
| dense_2 (Dense) | (None, 64) | 8256 |
| dense_3 (Dense) | (None, 5) | 325 |
| Health Condition | Tooth Profile | Label |
|---|---|---|
| Healthy | 20°/20° | S_1 |
| 25% Crack Level | 20°/20° | S_2 |
| 50% Crack Level | 20°/20° | S_3 |
| 75% Crack Level | 20°/20° | S_4 |
| 100% Crack Level | 20°/20° | S_5 |
| Health Condition | Tooth Profile | Label |
|---|---|---|
| Healthy | 20°/25° | A_1 |
| 25% Crack Level | 20°/25° | A_2 |
| 50% Crack Level | 20°/25° | A_3 |
| 75% Crack Level | 20°/25° | A_4 |
| 100% Crack Level | 20°/25° | A_5 |
| Health Condition | Tooth Profile | Label |
|---|---|---|
| Healthy | 20°/30° | AS_1 |
| 25% Crack Level | 20°/30° | AS_2 |
| 50% Crack Level | 20°/30° | AS_3 |
| 75% Crack Level | 20°/30° | AS_4 |
| 100% Crack Level | 20°/30° | AS_5 |
| Tooth Profile | SNR | Test-1 | Test-2 | Test-3 | Overall Accuracy | SD |
|---|---|---|---|---|---|---|
| 20°/20° | 5 | 78.138% | 79.122% | 82.304% | 79.854% | 0.02177 |
| 10 | 91.230% | 94.520% | 88.074% | 91.274% | 0.03223 | |
| 15 | 96.981% | 93.851% | 94.470% | 95.100% | 0.01657 | |
| 5 | 84.865% | 89.341% | 90.765% | 88.323% | 0.03078 | |
| 20°/25° | 10 | 94.798% | 96.963% | 95.653% | 95.804% | 0.01090 |
| 15 | 99.190% | 99.232% | 99.135% | 99.195% | 0.00048 | |
| 5 | 88.452% | 89.866% | 91.886% | 90.068% | 0.01725 | |
| 20°/30° | 10 | 97.083% | 96.402% | 95.944% | 96.476% | 0.00573 |
| 15 | 99.458% | 99.079% | 99.218% | 99.251% | 0.00191 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalay, O.C.; Karpat, E.; Dirik, A.E.; Karpat, F. A One-Dimensional Convolutional Neural Network-Based Method for Diagnosis of Tooth Root Cracks in Asymmetric Spur Gear Pairs. Machines 2023, 11, 413. https://doi.org/10.3390/machines11040413
Kalay OC, Karpat E, Dirik AE, Karpat F. A One-Dimensional Convolutional Neural Network-Based Method for Diagnosis of Tooth Root Cracks in Asymmetric Spur Gear Pairs. Machines. 2023; 11(4):413. https://doi.org/10.3390/machines11040413
Chicago/Turabian StyleKalay, Onur Can, Esin Karpat, Ahmet Emir Dirik, and Fatih Karpat. 2023. "A One-Dimensional Convolutional Neural Network-Based Method for Diagnosis of Tooth Root Cracks in Asymmetric Spur Gear Pairs" Machines 11, no. 4: 413. https://doi.org/10.3390/machines11040413
APA StyleKalay, O. C., Karpat, E., Dirik, A. E., & Karpat, F. (2023). A One-Dimensional Convolutional Neural Network-Based Method for Diagnosis of Tooth Root Cracks in Asymmetric Spur Gear Pairs. Machines, 11(4), 413. https://doi.org/10.3390/machines11040413