
Localization of Mobile Manipulator in Vineyards for Autonomous Task Execution


Abstract
1. Introduction
1.1. HEKTOR Project
1.2. All-Terrain Mobile Manipulator- ATMM-VIV
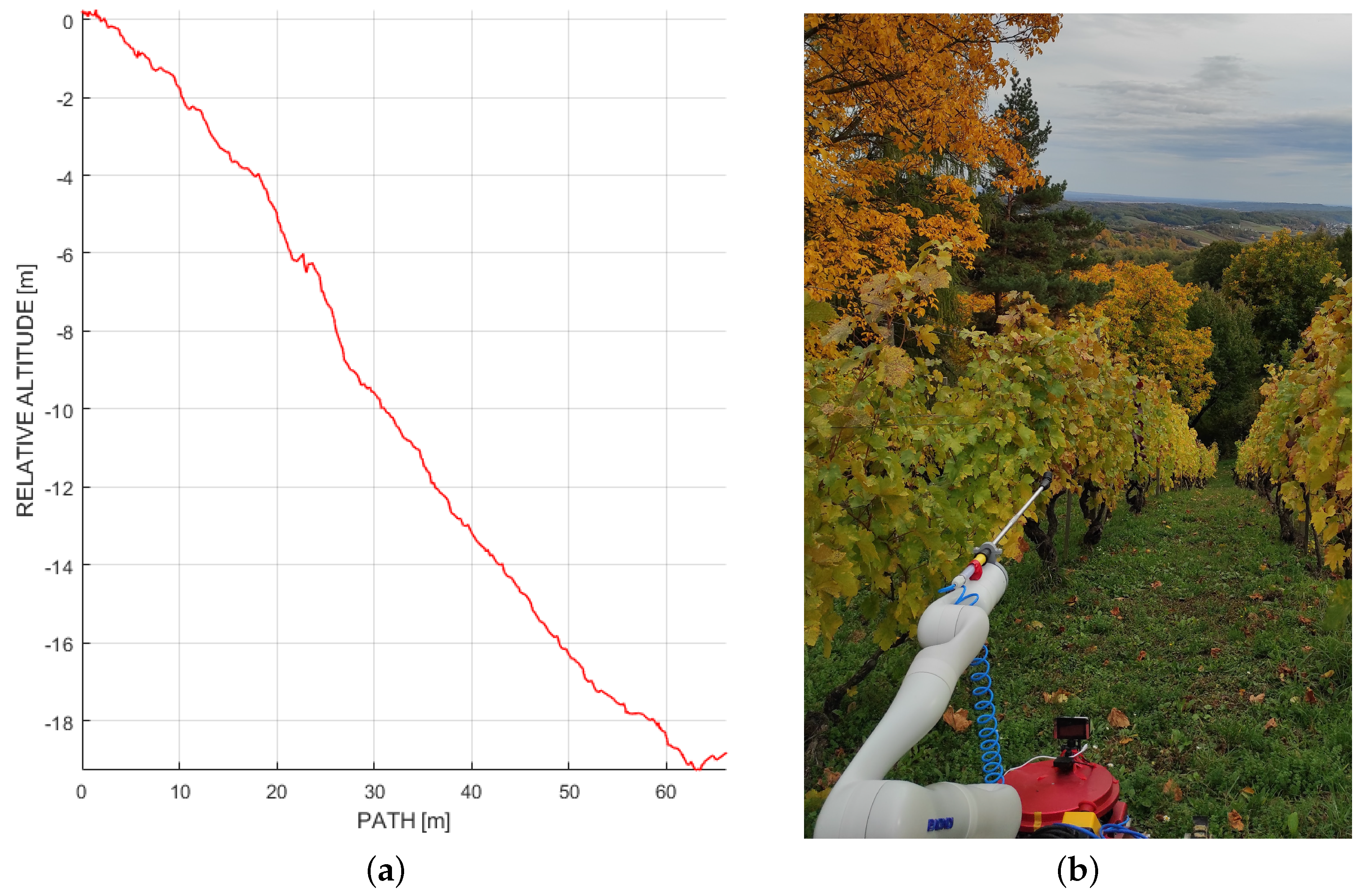
1.3. HEKTOR Vineyard Navigation
2. Related Work
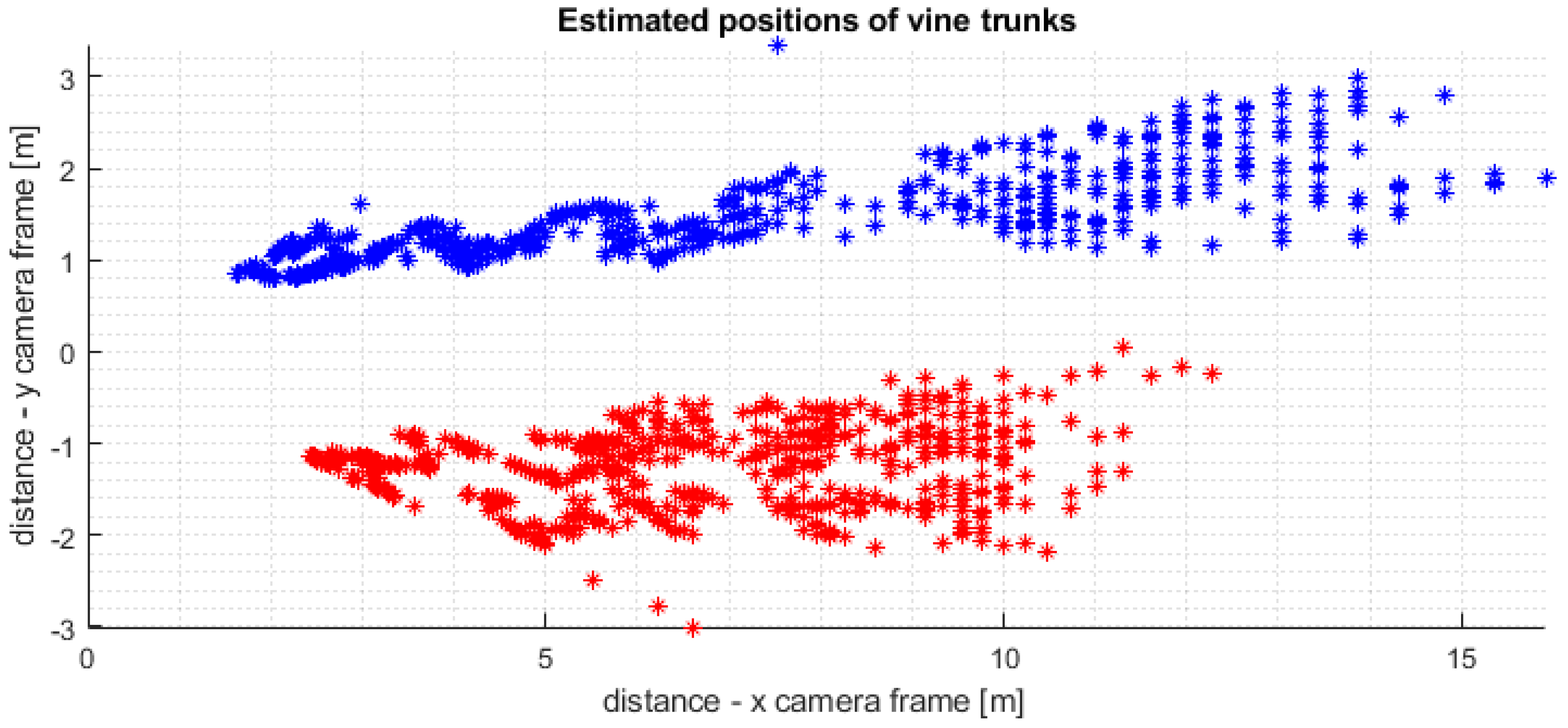
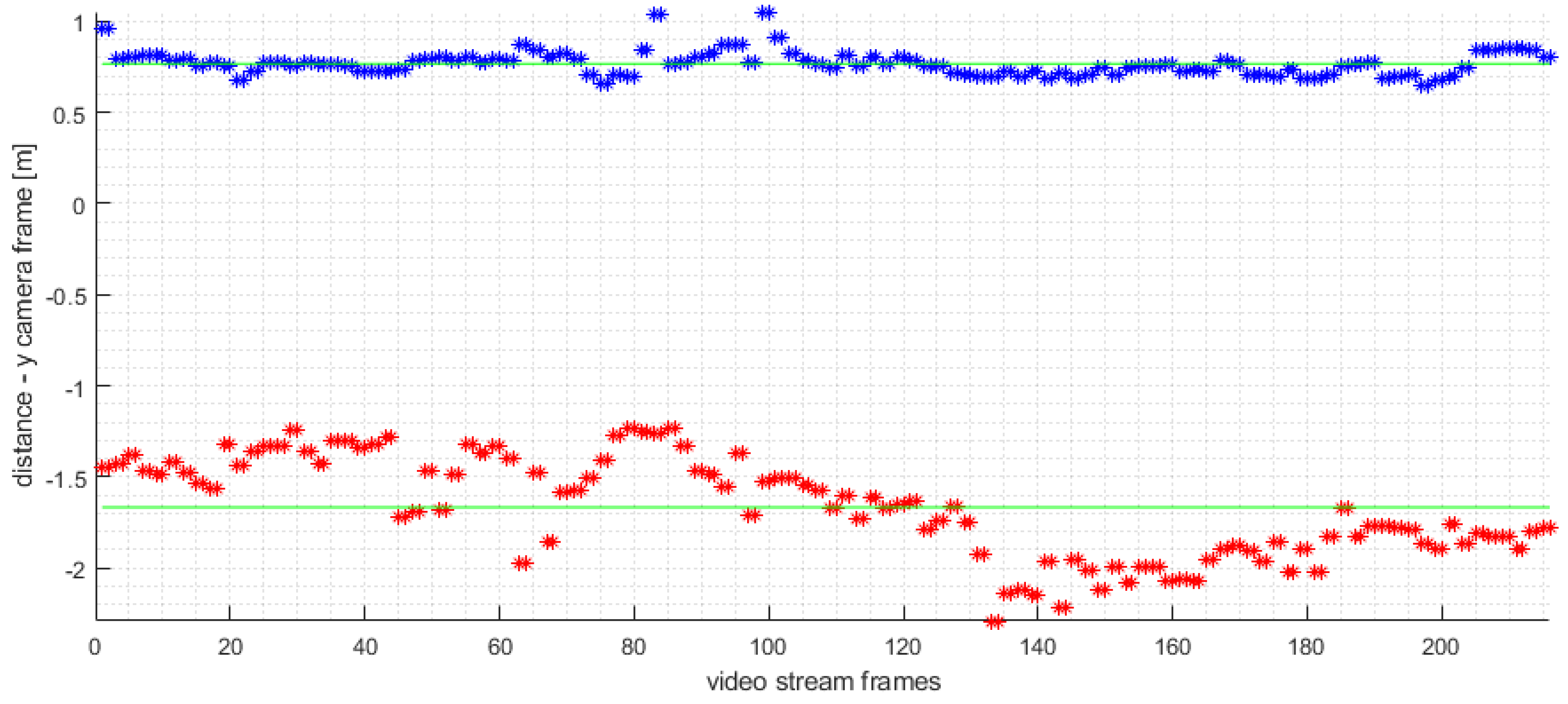
3. Vine Trunk Localization
Detection of Objects of Interest
4. Experimental Verification
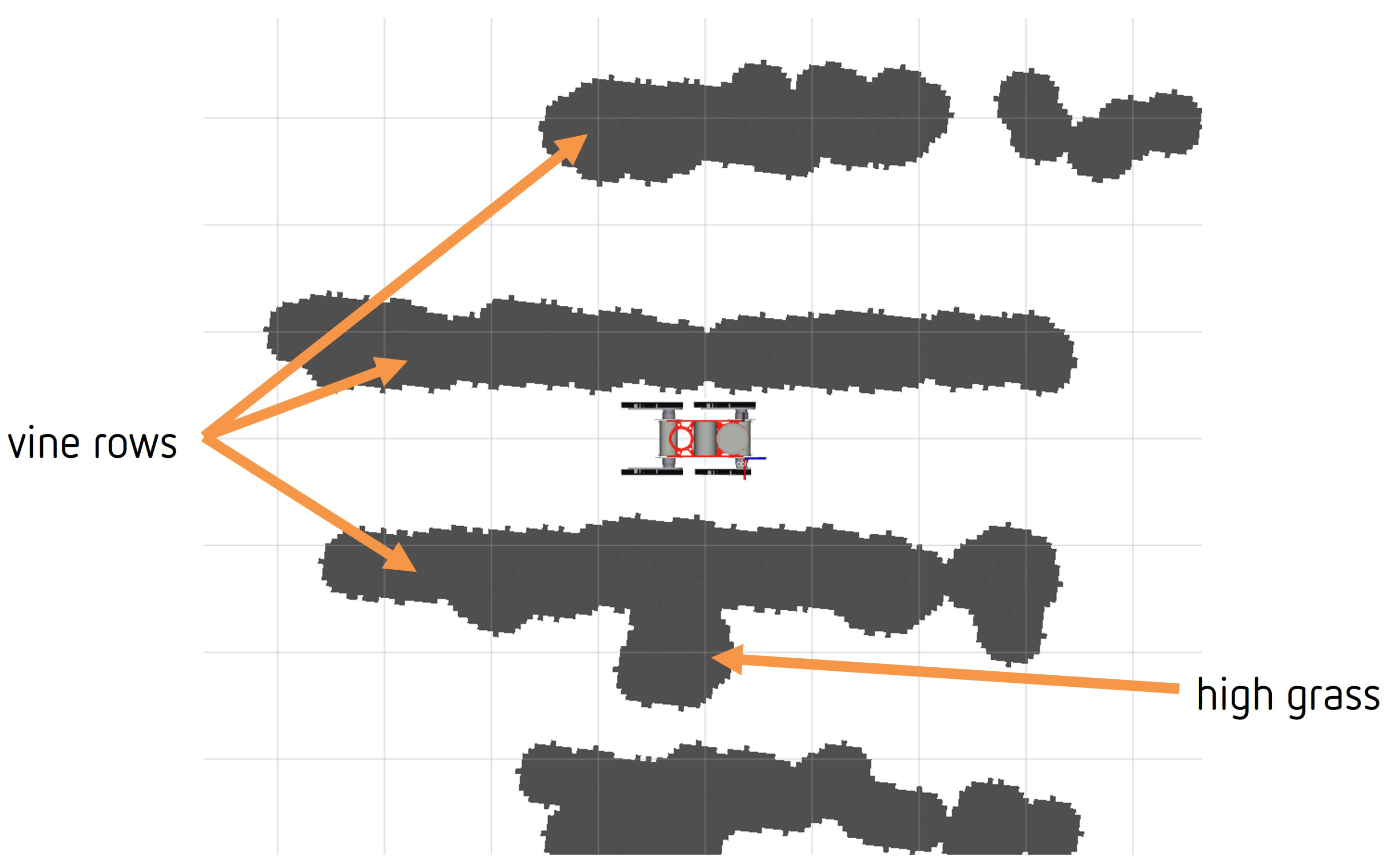
Vine Trunk Detection as a Goal Setting Method
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Oliveira, L.F.; Moreira, A.P.; Silva, M.F. Advances in agriculture robotics: A state-of-the-art review and challenges ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Gonzalez-de Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field robots for intelligent farms—Inhering features from industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Duckett, T.; Pearson, S.; Blackmore, S.; Grieve, B.; Chen, W.H.; Cielniak, G.; Cleaversmith, J.; Dai, J.; Davis, S.; Fox, C.; et al. Agricultural robotics: The future of robotic agriculture. arXiv 2018, arXiv:1806.06762. [Google Scholar] [CrossRef]
- Roure, F.; Bascetta, L.; Soler, M.; Matteucci, M.; Faconti, D.; Gonzalez, J.P.; Serrano, D. Lessons Learned in Vineyard Monitoring and Protection from a Ground Autonomous Vehicle. In Advances in Robotics Research: From Lab to Market; Springer: Berlin/Heidelberg, Germany, 2020; pp. 81–105. [Google Scholar] [CrossRef]
- Dos Santos, F.N.; Sobreira, H.; Campos, D.; Morais, R.; Paulo Moreira, A.; Contente, O. Towards a reliable robot for steep slope vineyards monitoring. J. Intell. Robot. Syst. 2016, 83, 429–444. [Google Scholar] [CrossRef]
- Miller, G.T.; Spoolman, S. Sustaining the Earth; Cengage Learning: Boston, MA, USA, 2014. [Google Scholar]
- Goricanec, J. Heterogeneous autonomous robotic system in viticulture and mariculture-project overview. In Proceedings of the 2021 16th International Conference on Telecommunications (ConTEL), Zagreb, Croatia, 30 June–2 July 2021; pp. 181–188. [Google Scholar] [CrossRef]
- Kapetanović, N.; Goričanec, J.; Vatavuk, I.; Hrabar, I.; Stuhne, D.; Vasiljević, G.; Kovačić, Z.; Mišković, N.; Antolović, N.; Anić, M.; et al. Heterogeneous Autonomous Robotic System in Viticulture and Mariculture: Vehicles Development and Systems Integration. Sensors 2022, 22, 2961. [Google Scholar] [CrossRef] [PubMed]
- Stuhne, D.; Vatavuk, I.; Hrabar, I.; Vasiljević, G.; Kovačić, Z. Automated Suckering of Vines with a Mobile Robot and a Torque-controlled Suckering Tool. In Proceedings of the 2022 International Conference on Smart Systems and Technologies (SST), Macau, China, 30–31 December 2022; pp. 349–354. [Google Scholar] [CrossRef]
- Vatavuk, I.; Stuhne, D.; Vasiljević, G.; Kovačić, Z. Direct Drive Brush-Shaped Tool with Torque Sensing Capability for Compliant Robotic Vine Suckering. Sensors 2023, 23, 1195. [Google Scholar] [CrossRef] [PubMed]
- Vatavuk, I.; Vasiljević, G.; Kovačić, Z. Task Space Model Predictive Control for Vineyard Spraying with a Mobile Manipulator. Agriculture 2022, 12, 381. [Google Scholar] [CrossRef]
- Hrabar, I.; Goričanec, J.; Kovačić, Z. Towards Autonomous Navigation of a Mobile Robot in a Steep Slope Vineyard. In Proceedings of the 2021 44th International Convention on Information, Communication and Electronic Technology (MIPRO), Opatija, Croatia, 27 September–1 October 2021; pp. 1119–1124. [Google Scholar] [CrossRef]
- Hrabar, I.; Vasiljević, G.; Kovačić, Z. Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards. Electronics 2022, 11, 217. [Google Scholar] [CrossRef]
- Santos, L.; Santos, F.N.; Magalhães, S.; Costa, P.; Reis, R. Path planning approach with the extraction of topological maps from occupancy grid maps in steep slope vineyards. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Gondomar, Porto, 24–29 April 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Roure, F.; Moreno, G.; Soler, M.; Faconti, D.; Serrano, D.; Astolfi, P.; Bardaro, G.; Gabrielli, A.; Bascetta, L.; Matteucci, M. GRAPE: Ground robot for vineyard monitoring and protection. In Proceedings of the Iberian Robotics Conference, Sevilla, Spain, 22–24 November 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 249–260. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Rawankar, A.; Hoshino, Y. Autonomous and safe navigation of mobile robots in vineyard with smooth collision avoidance. Agriculture 2021, 11, 954. [Google Scholar] [CrossRef]
- Astolfi, P.; Gabrielli, A.; Bascetta, L.; Matteucci, M. Vineyard autonomous navigation in the echord++ grape experiment. IFAC-PapersOnLine 2018, 51, 704–709. [Google Scholar] [CrossRef]
- Hroob, I.; Polvara, R.; Molina, S.; Cielniak, G.; Hanheide, M. Benchmark of visual and 3D lidar SLAM systems in simulation environment for vineyards. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, Lincoln, UK, 8–10 September 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 168–177. [Google Scholar] [CrossRef]
- Ahmadi, A.; Nardi, L.; Chebrolu, N.; Stachniss, C. Visual servoing-based navigation for monitoring row-crop fields. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4920–4926. [Google Scholar] [CrossRef]
- Vit, A.; Shani, G. Comparing rgb-d sensors for close range outdoor agricultural phenotyping. Sensors 2018, 18, 4413. [Google Scholar] [CrossRef] [PubMed]
- Condotta, I.C.; Brown-Brandl, T.M.; Pitla, S.K.; Stinn, J.P.; Silva-Miranda, K.O. Evaluation of low-cost depth cameras for agricultural applications. Comput. Electron. Agric. 2020, 173, 105394. [Google Scholar] [CrossRef]
- Aghi, D.; Cerrato, S.; Mazzia, V.; Chiaberge, M. Deep semantic segmentation at the edge for autonomous navigation in vineyard rows. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3421–3428. [Google Scholar] [CrossRef]
- Aguiar, A.S.; Monteiro, N.N.; Santos, F.N.d.; Solteiro Pires, E.J.; Silva, D.; Sousa, A.J.; Boaventura-Cunha, J. Bringing semantics to the vineyard: An approach on deep learning-based vine trunk detection. Agriculture 2021, 11, 131. [Google Scholar] [CrossRef]
- de Aguiar, A.S.P.; dos Santos, F.B.N.; dos Santos, L.C.F.; de Jesus Filipe, V.M.; de Sousa, A.J.M. Vineyard trunk detection using deep learning–An experimental device benchmark. Comput. Electron. Agric. 2020, 175, 105535. [Google Scholar] [CrossRef]
- Santos, L.C.; Aguiar, A.S.; Santos, F.N.; Valente, A.; Ventura, J.B.; Sousa, A.J. Navigation stack for robots working in steep slope vineyard. In Proceedings of the SAI Intelligent Systems Conference, London, UK, 3–4 September 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 264–285. [Google Scholar] [CrossRef]
- Sarmento, J.; Aguiar, A.S.; Santos, F.N.d.; Sousa, A.J. Robot navigation in vineyards based on the visual vanish point concept. In Proceedings of the 2021 International Symposium of Asian Control Association on Intelligent Robotics and Industrial Automation (IRIA), Goa, India, 20–22 September 2021; pp. 406–413. [Google Scholar] [CrossRef]
- Badeka, E.; Kalampokas, T.; Vrochidou, E.; Tziridis, K.; Papakostas, G.; Pachidis, T.; Kaburlasos, V. Real-time vineyard trunk detection for a grapes harvesting robot via deep learning. In Proceedings of the Thirteenth International Conference on Machine Vision, Rome, Italy, 8–12 November 2021; Volume 11605, pp. 394–400. [Google Scholar] [CrossRef]
- Martini, M.; Cerrato, S.; Salvetti, F.; Angarano, S.; Chiaberge, M. Position-Agnostic Autonomous Navigation in Vineyards with Deep Reinforcement Learning. In Proceedings of the 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), Mexico City, Mexico, 22–26 August 2022; pp. 477–484. [Google Scholar] [CrossRef]
- Van Dijk, T.; De Croon, G. How Do Neural Networks See Depth in Single Images? In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 2183–2191. [Google Scholar] [CrossRef]
- Jocher, G. YOLOv5 by Ultralytics. 2020. Available online: https://doi.org/10.5281/zenodo.3908559 (accessed on 16 March 2022).
- VineSet. Available online: http://vcriis01.inesctec.pt/datasets/DataSet/VineSet.zip (accessed on 8 February 2022).
- Humain-Lab-Vine-Trunk-Dataset. Available online: https://github.com/humain-lab/vine-trunk (accessed on 5 April 2022).
- Tzutalin. Labellmg. Available online: https://github.com/heartexlabs/labelImg (accessed on 7 March 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Comment | Value |
|---|---|---|
| image HSV-hue augmentation | fraction | 0.15 |
| image HSV-saturation augmentation | fraction | 0.7 |
| image HSV-value augmentation | fraction | 0.4 |
| image rotation | +/− deg | 15.0 |
| image translation | +/− fraction | 0.1 |
| image scale | +/− gain | 0.5 |
| image shear | +/− deg | 0.0 |
| image perspective | +/− fraction | 0.0001 |
| image flip up-down | probability | 0.0 |
| image flip left-right | probability | 0.5 |
| image mosaic | probability | 0.0 |
| image mixup | probability | 0.0 |
| segment copy-paste | probability | 0.0 |
| Correct | False Positive | False Negative | Double Detection | Neighboring Row |
|---|---|---|---|---|
| 298 | 14 | 16 | 14 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hrabar, I.; Kovačić, Z. Localization of Mobile Manipulator in Vineyards for Autonomous Task Execution. Machines 2023, 11, 414. https://doi.org/10.3390/machines11040414
Hrabar I, Kovačić Z. Localization of Mobile Manipulator in Vineyards for Autonomous Task Execution. Machines. 2023; 11(4):414. https://doi.org/10.3390/machines11040414
Chicago/Turabian StyleHrabar, Ivan, and Zdenko Kovačić. 2023. "Localization of Mobile Manipulator in Vineyards for Autonomous Task Execution" Machines 11, no. 4: 414. https://doi.org/10.3390/machines11040414
APA StyleHrabar, I., & Kovačić, Z. (2023). Localization of Mobile Manipulator in Vineyards for Autonomous Task Execution. Machines, 11(4), 414. https://doi.org/10.3390/machines11040414