
Prediction of Thermal Deformation and Real-Time Error Compensation of a CNC Milling Machine in Cutting Processes

Abstract
:1. Introduction
2. Thermal Error Compensation for a CNC Milling Machine
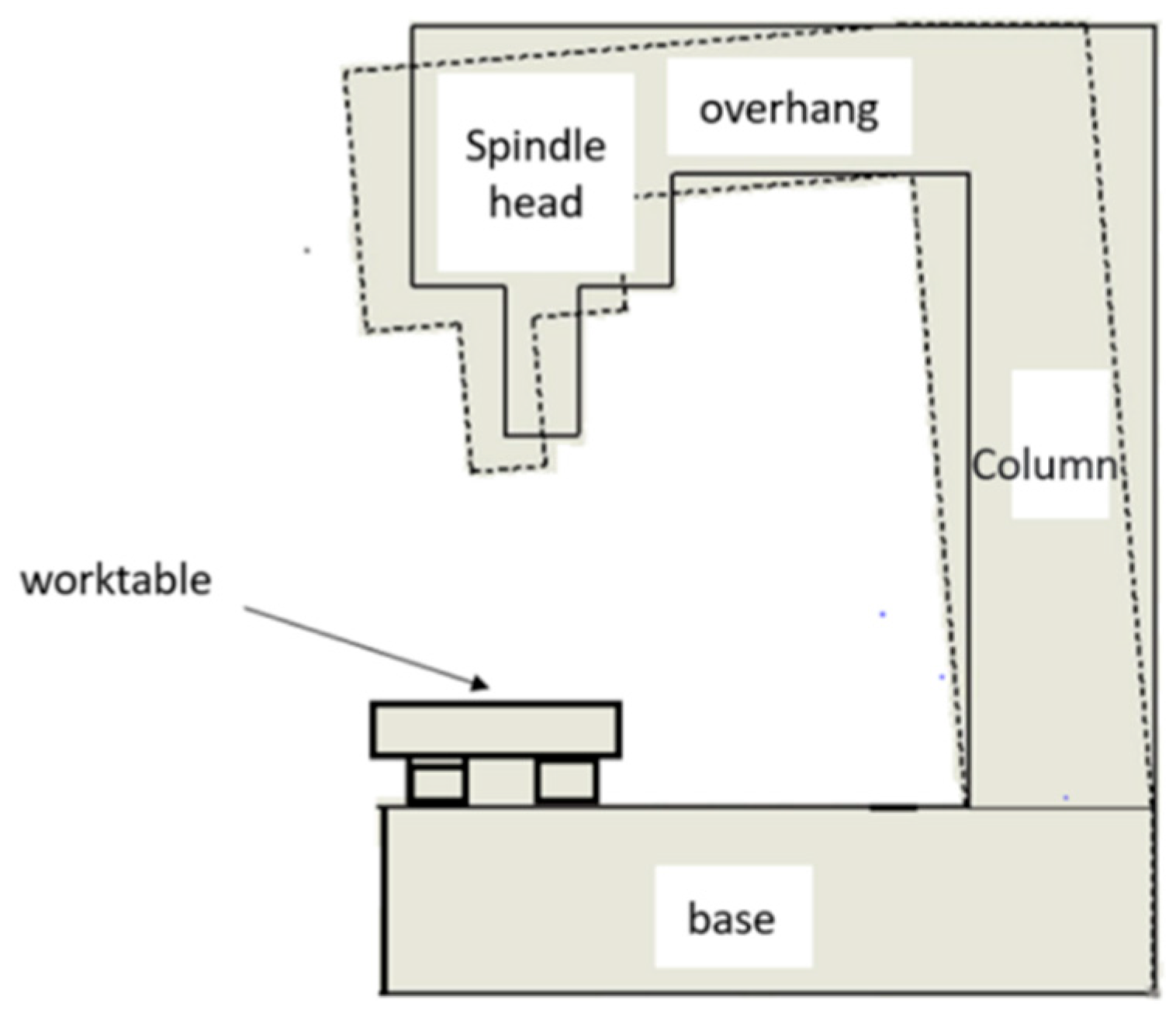
2.1. CNC Three-Axis Milling Machine
2.2. Thermal Deformation Principle
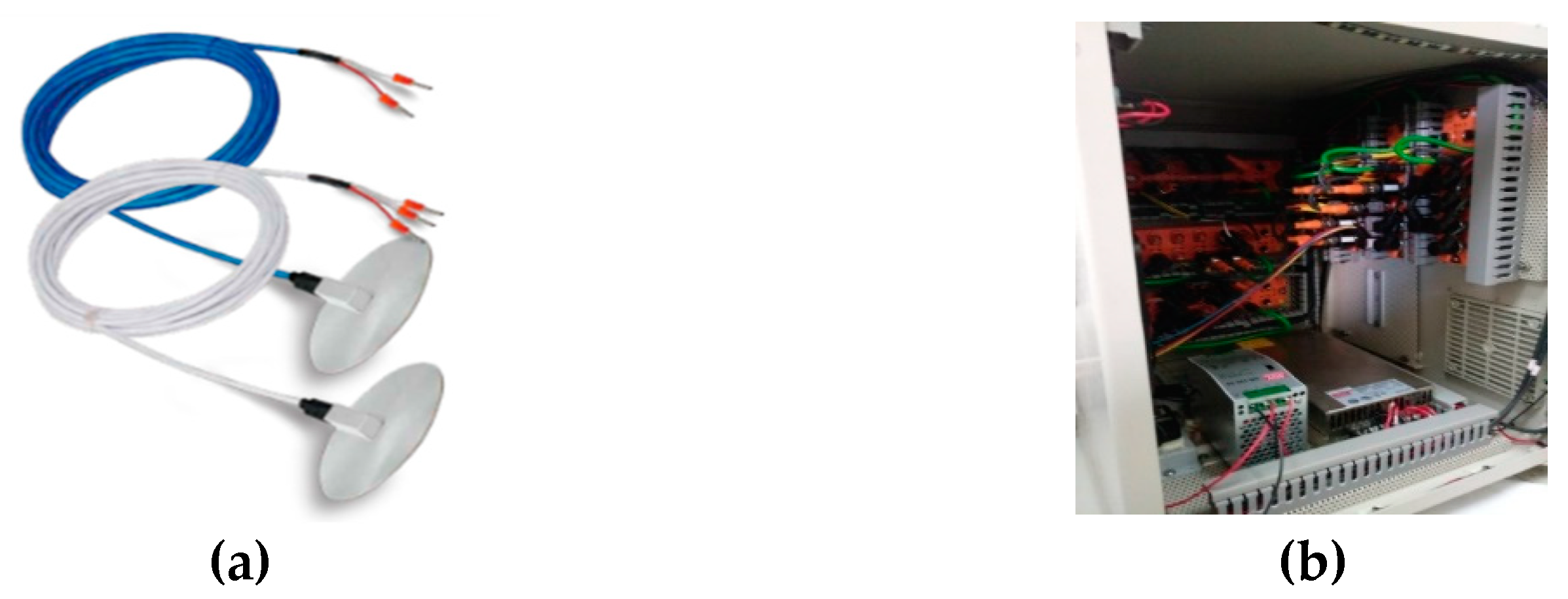
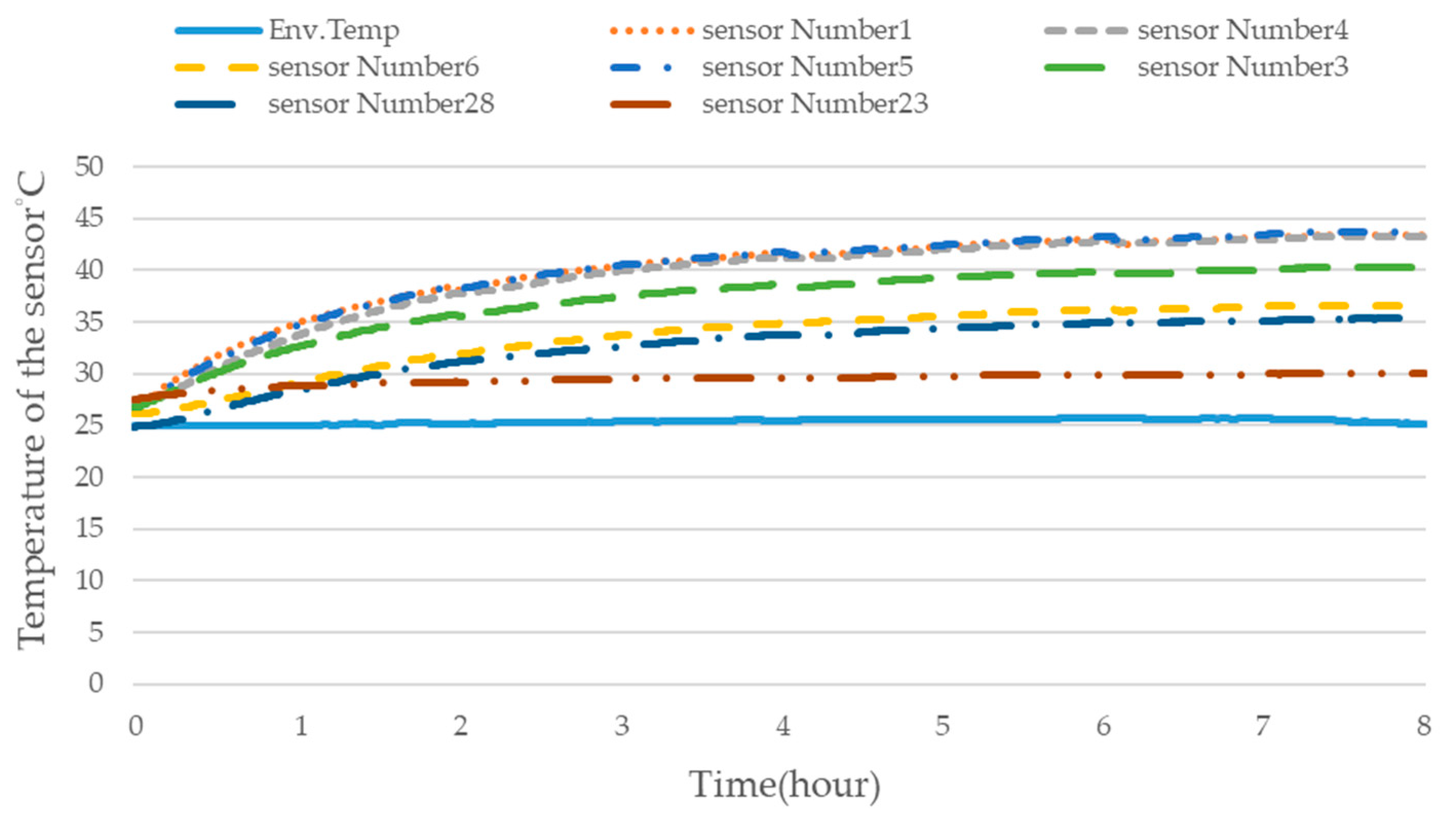
2.3. Temperature Sensors
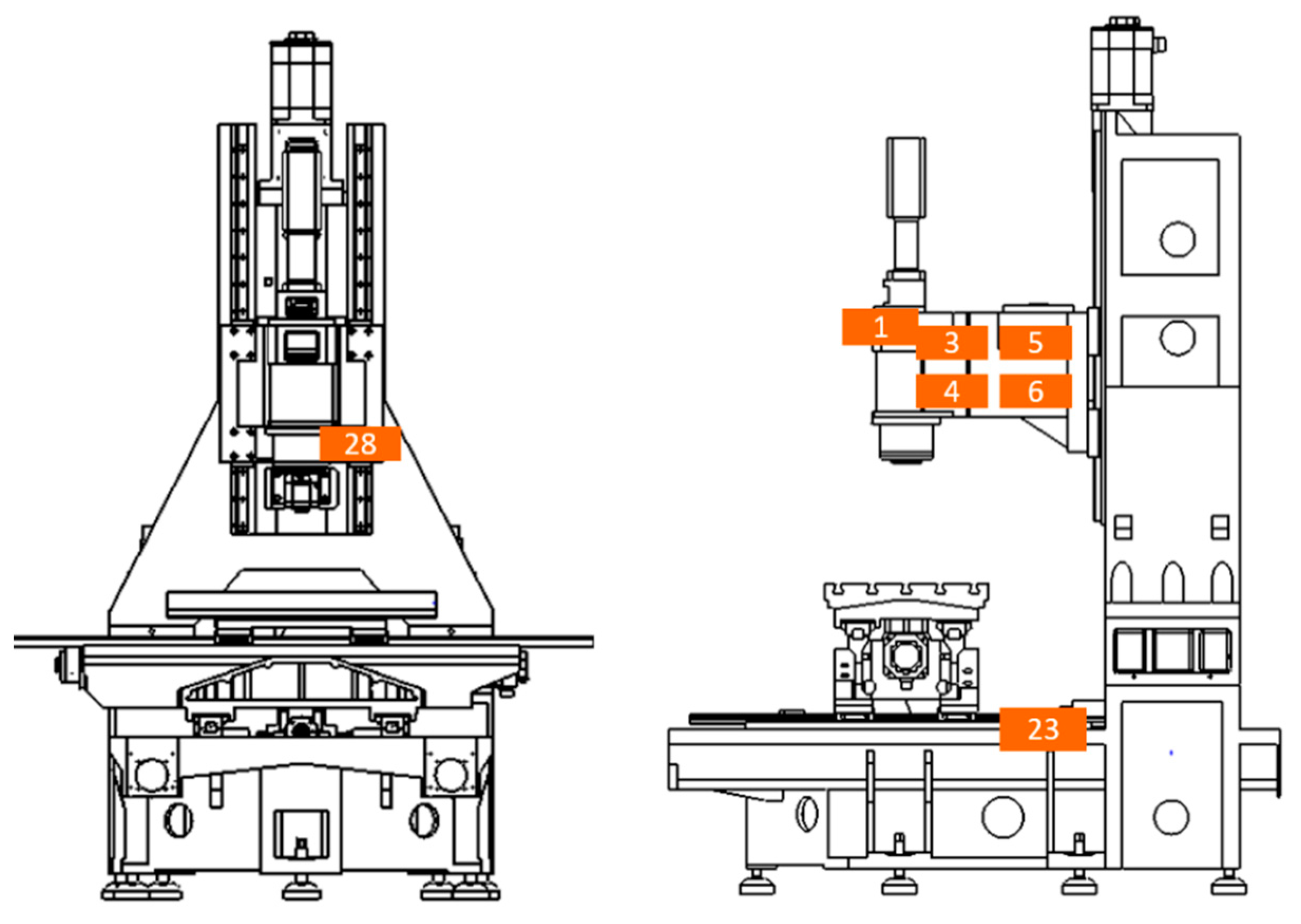
Installation Location of Temperature Sensors
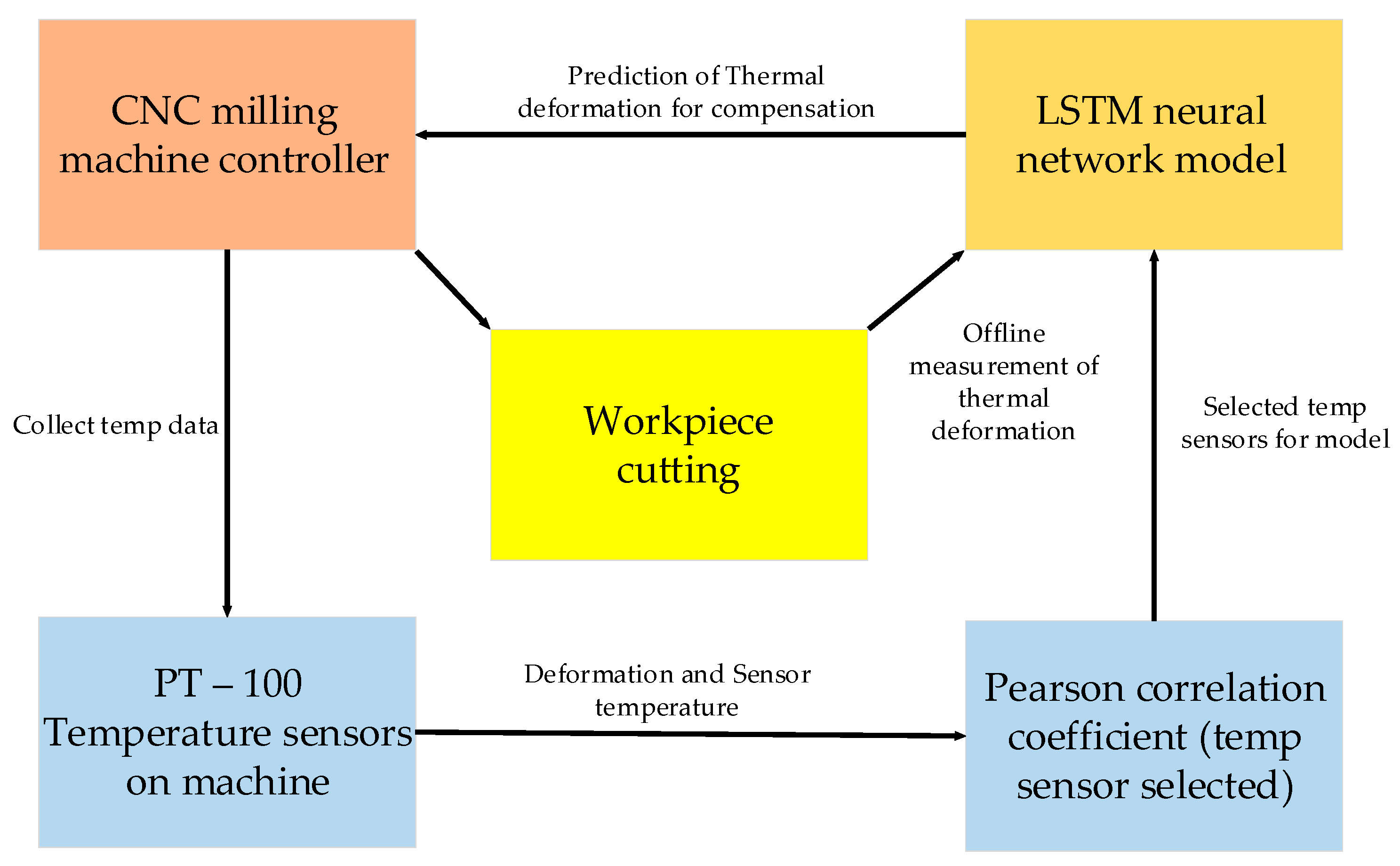
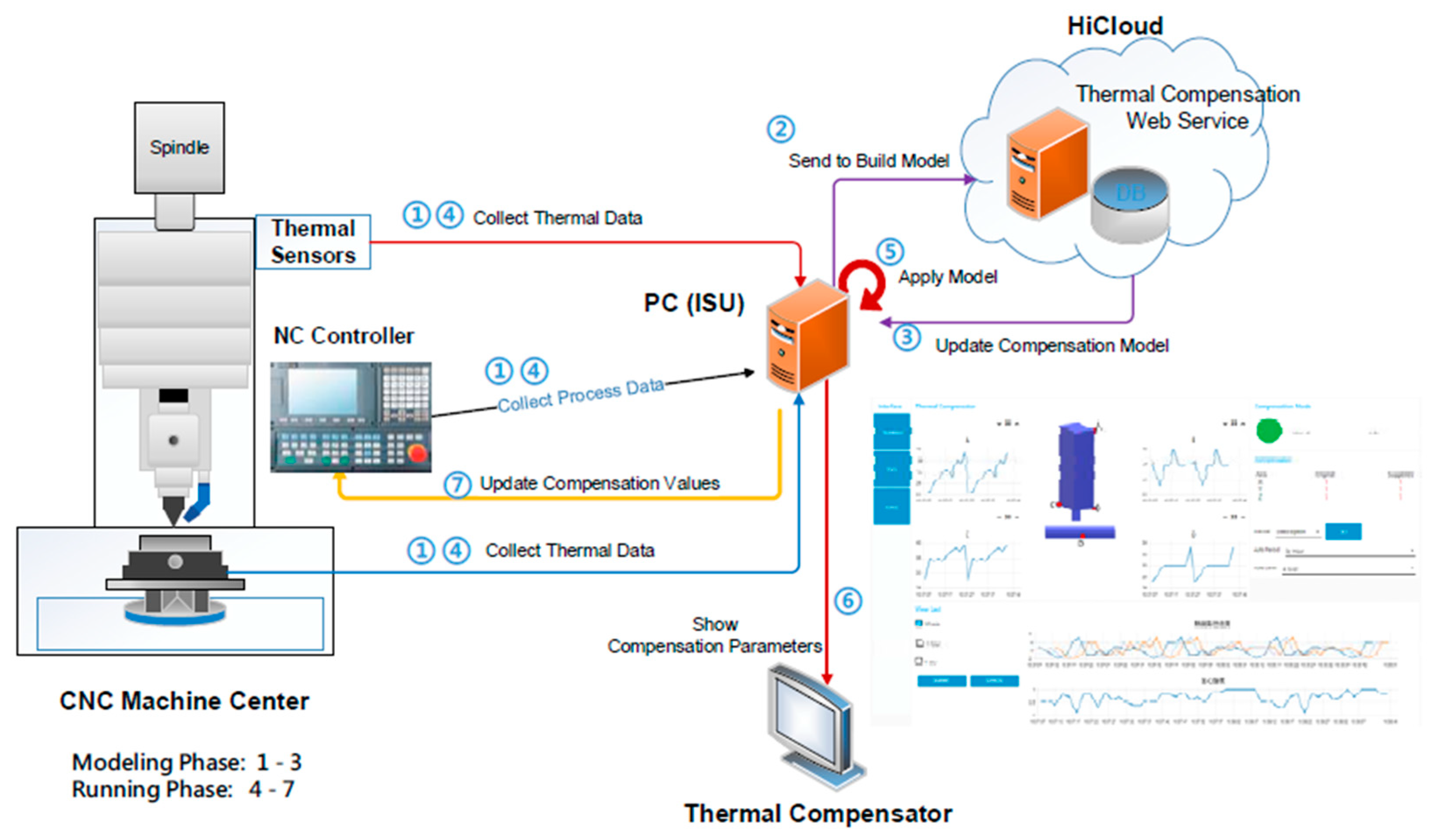
2.4. Compensation of Thermal Errors
3. Thermal Deformation Experiment of Actual Cutting Processes
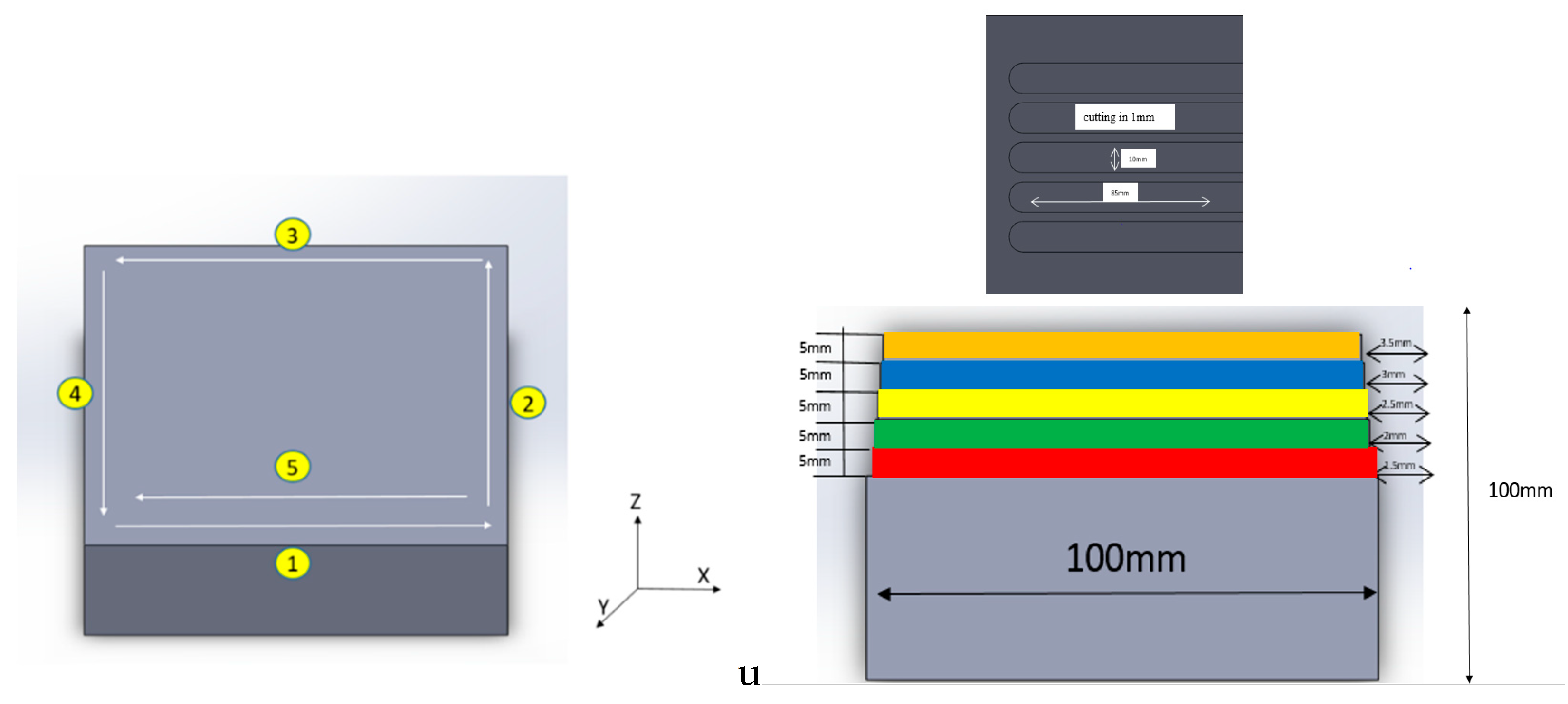
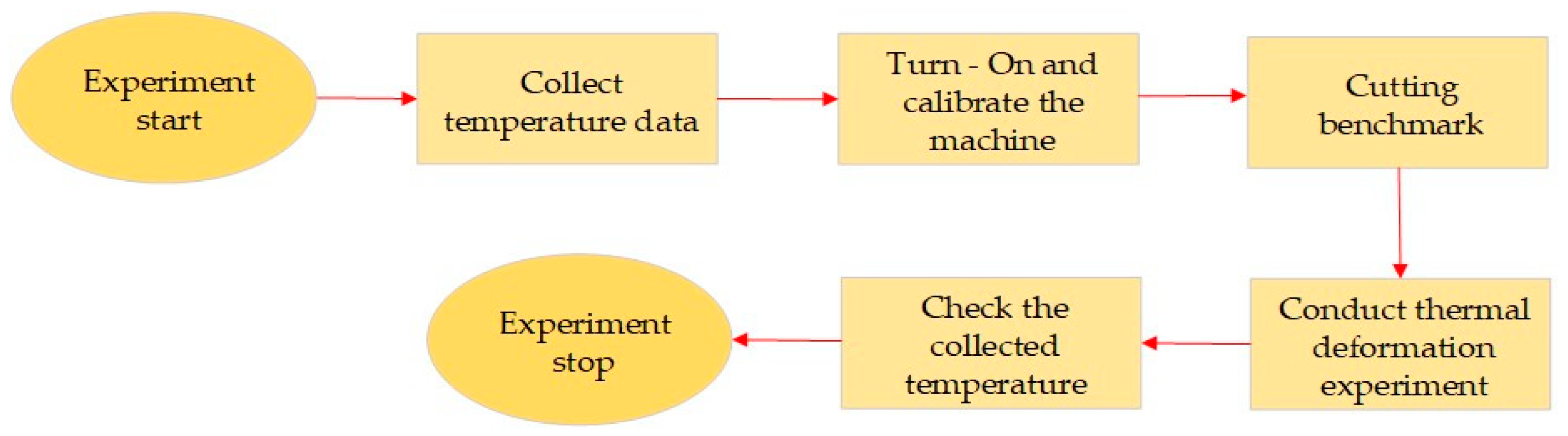
3.1. Experiments of Thermal Deformation Measurement
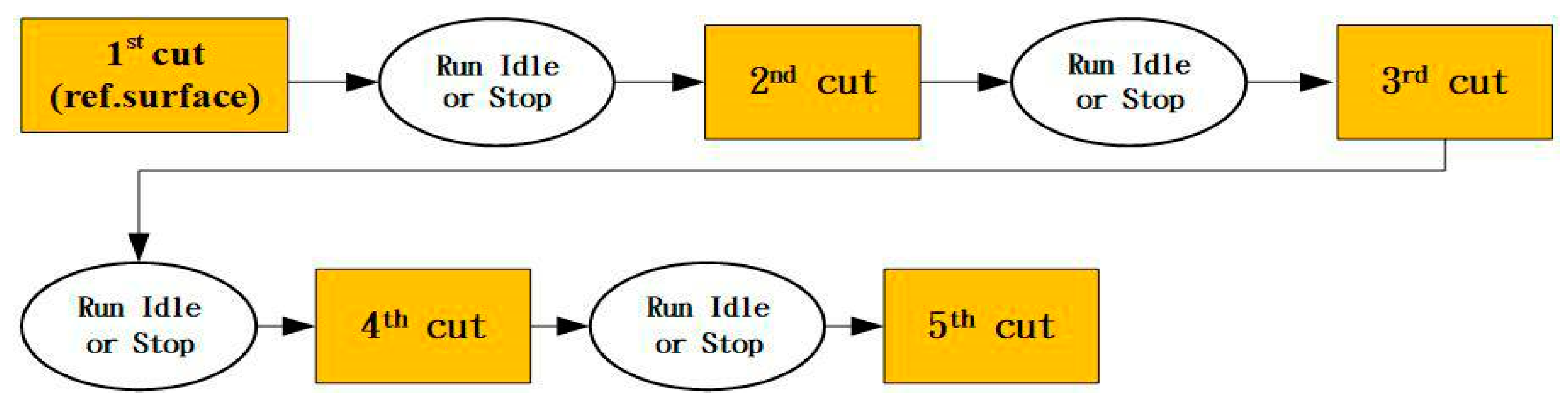
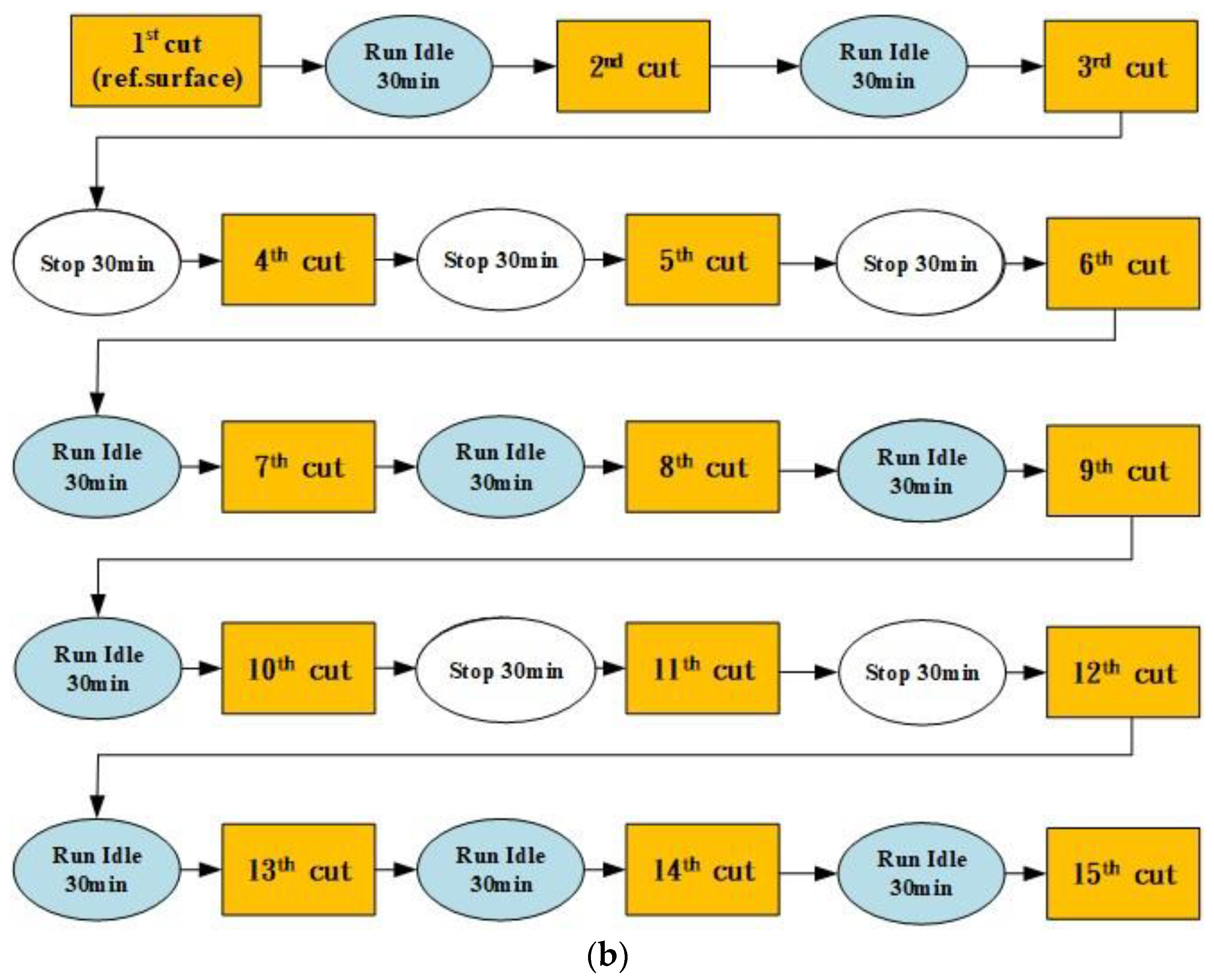
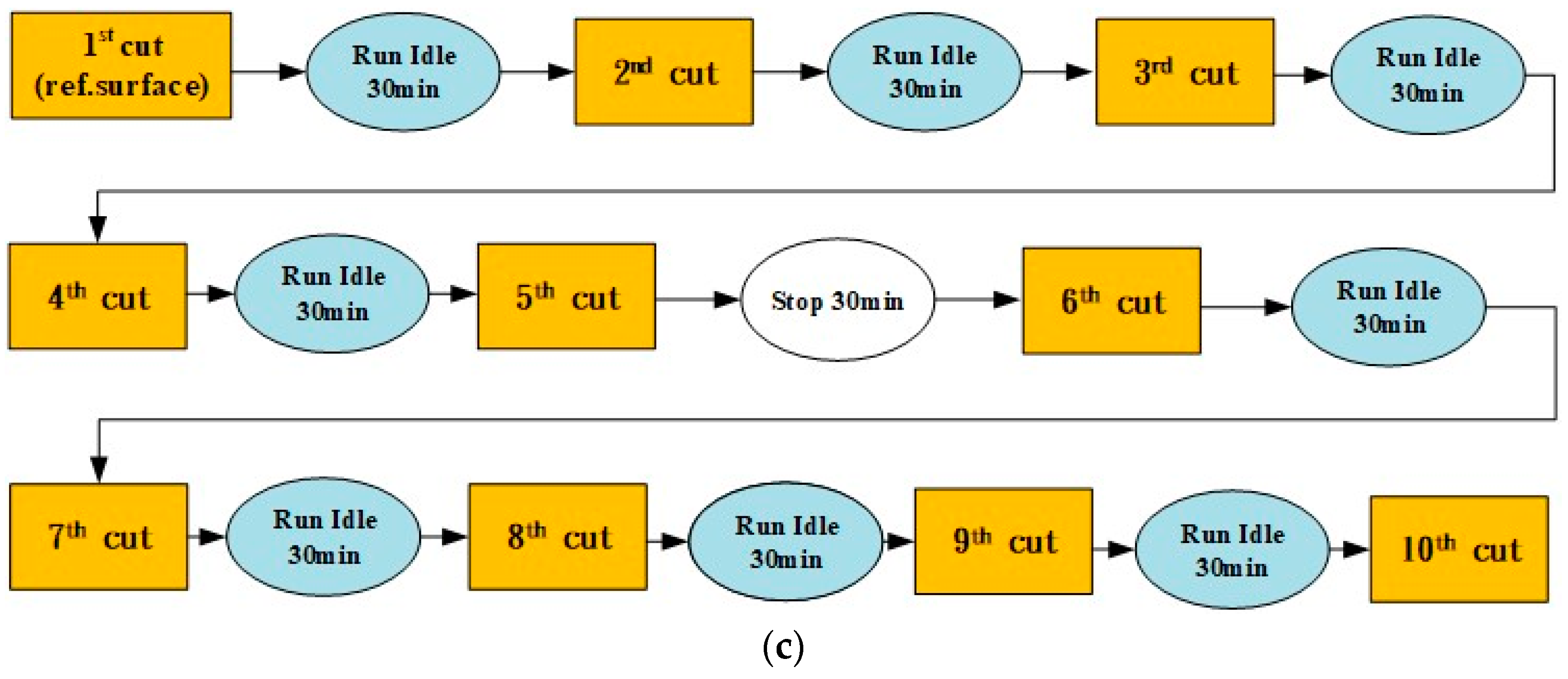
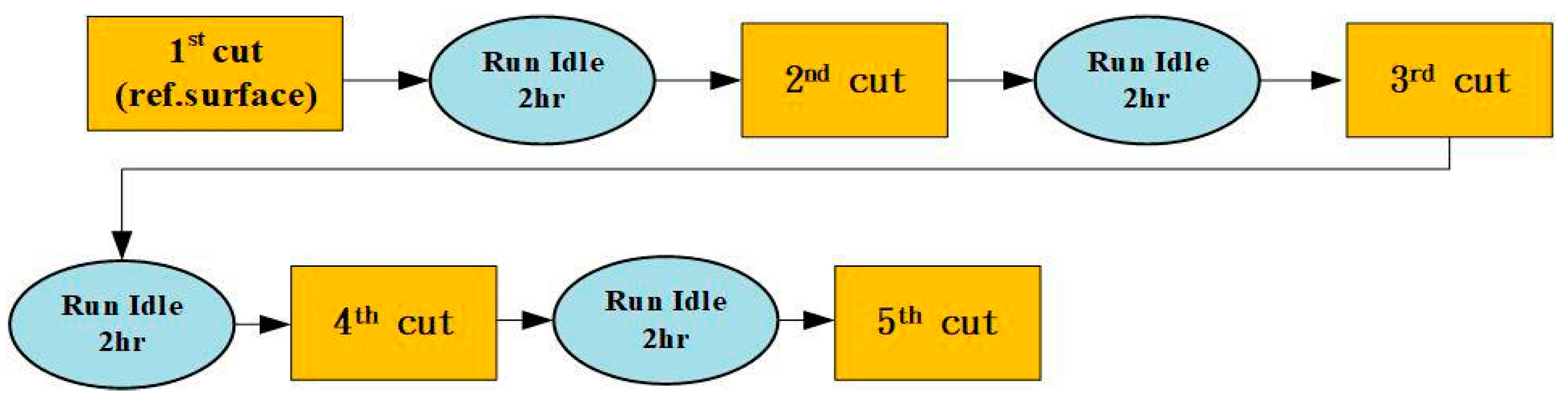
3.2. Experimental Procedure of Thermal Deformation
3.3. Cutting Experiments of Thermal Deformation
4. Pearson’s Correlation Coefficients and Selection of Critical Temperature Sensors
4.1. Pearson’s Correlation Coefficient Formula
4.2. Selection of Crucial Temperature Sensors
5. Prediction Model of Thermal Error
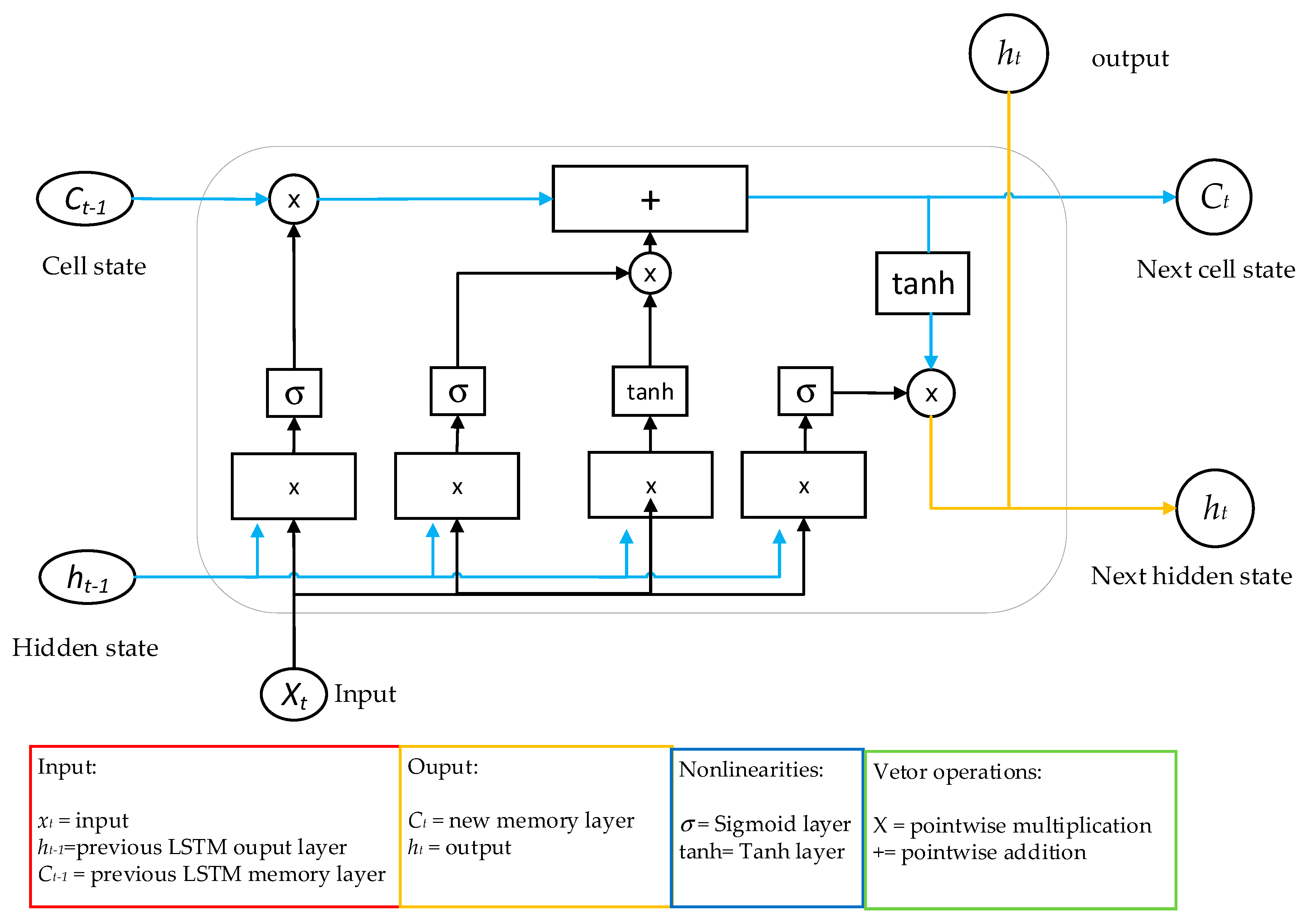
5.1. Long- and Short-Term Memory (LSTM) Neural Network
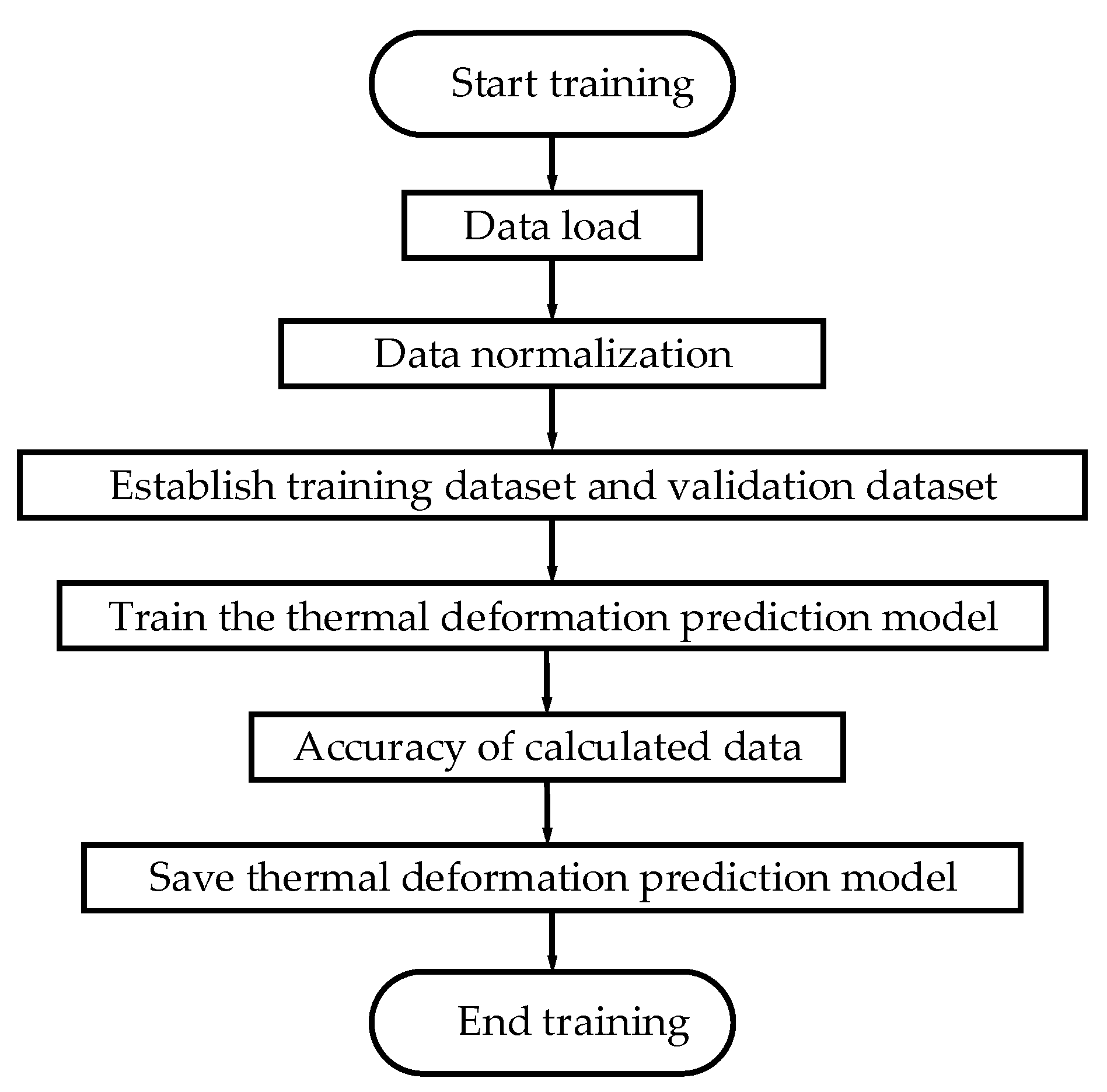
5.2. AI Model of This Study
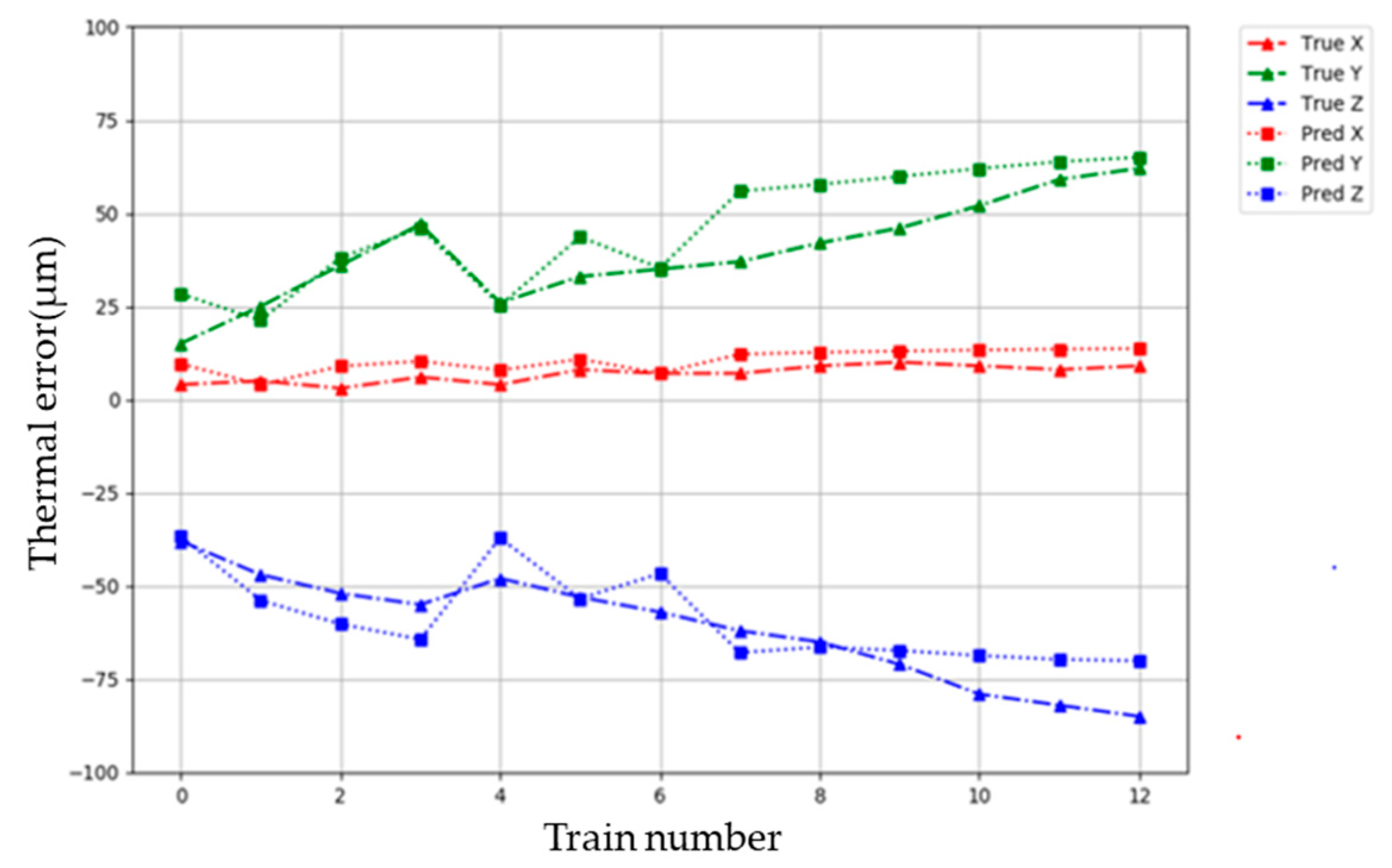
6. Prediction Model of Thermal Error Verified by Actual Cutting Experiments
7. Real-Time Compensation of Thermal Errors
8. Conclusions
- A three-axis vertical CNC milling machine was used as the experimental machine, and 32 PT-100 temperature sensors were installed inside the machine parts to measure the temperature of key machine parts under different working conditions in cutting processes. Seven crucial temperature sensors, which have a high correlation with the thermal deformation of the machine, were selected by Pearson’s correlation coefficient. With one additional sensor of ambient temperature, in total, eight temperature sensors were used to construct the prediction model of thermal error.
- This study demonstrates that an LSTM neural network, adopted as the prediction model of thermal error, can perform very well in real-time error compensation of a CNC milling machine. This methodology should be able to be implemented in other CNC cutting machine tools.
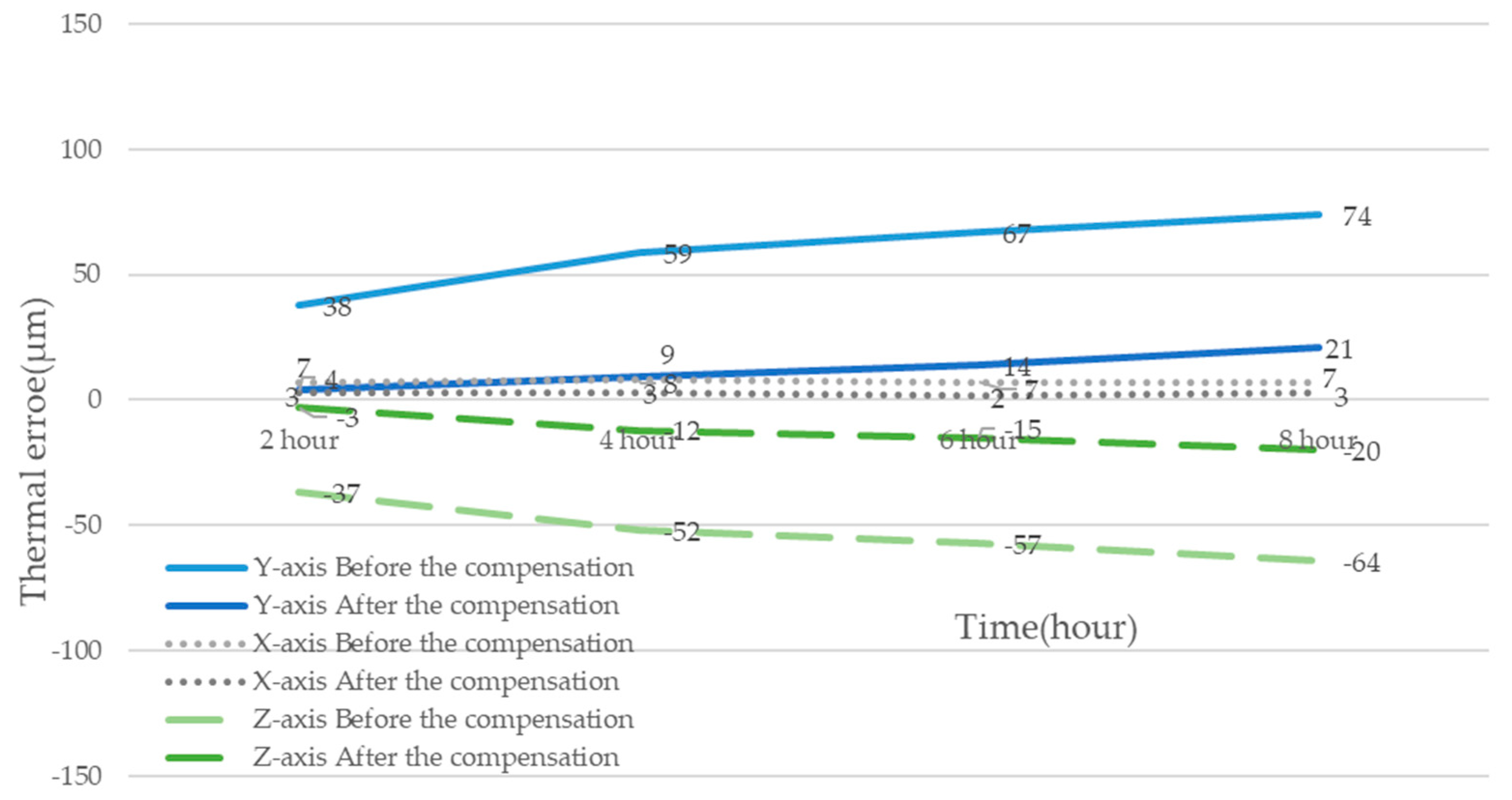
- In an 8 h cutting experiment, the dimensions of the workpiece showed that, with real-time error compensation, the thermal error in X-axis decreased from 7 µm to 3 µm, the thermal error in Y-axis decreased from 74 µm to 21 µm, and the thermal error in Z-axis decreased from −64 µm to −20 µm. The results show that the prediction model of thermal error and the real-time error compensation can significantly reduce the thermal error and improve the dimensional accuracy of the workpiece.
- Future work on related research topics includes the exploration of other selection methods in temperature-sensitive sensors and compensation results of long machining sequences, i.e., 12 h or 18 h continuous machining processes.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rosenblatt, F. A probabilistic model for information storage and organization in the brain. Psychol. Rev. 1958, 65, 386–408. [Google Scholar] [CrossRef]
- Chen, J.S.; Yuan, J.X.; Ni, J.; Wu, S.M. Real-time compensation for time-variant volumetric errors on a machining center. J. Eng. Ind.-T ASME 1993, 115, 472. [Google Scholar] [CrossRef]
- Che, J.S. Study of thermally induced machine tool errors in real cutting conditions. Int. J. Mach. Tools Manuf. 1996, 36, 1401–1411. [Google Scholar]
- Horejša, O.; Mareša, M.; Novotnýa, L. Advanced modelling of thermally induced displacements and its implementation into standard cnc controller of horizontal milling center. Proc. Cirp 2012, 4, 67–72. [Google Scholar] [CrossRef]
- Mian, N.S.; Fletcher, S.; Longstaff, A.P.; Myers, A. Efficient estimation by FEA of machine tool distortion due to environmental temperature perturbations. Precis. Eng. 2013, 37, 372–379. [Google Scholar] [CrossRef]
- Miao, S. Improvement of the robustness of thermal error time series model prediction for CNC machine tools. Precis. Eng. 2016, 24, 10. [Google Scholar]
- Zhang, C.; Gao, F.; Yan, L. Thermal error characteristic analysis and modeling for machine tools due to time-varying environmental temperature. Precis. Eng. 2016, 47, 231–238. [Google Scholar] [CrossRef]
- Zhou, Z.D.; Gui, L.; Tan, Y.G.; Liu, M.Y.; Liu, Y.; Li, R.Y. Actualities and development of heavy-duty cnc machine tool thermal error monitoring technology. Chin. J. Mech. Eng. 2017, 30, 1262–1281. [Google Scholar] [CrossRef]
- Groos, L.; Held, C.; Keller, F.; Wendt, K.; Franke, M.; Gerwien, N. Mapping and compensation of geometric errors of a machine tool at different constant ambient temperatures. Precis. Eng. 2020, 63, 10–17. [Google Scholar] [CrossRef]
- Yang, J.; Yuan, J.; Ni, J. Thermal error mode analysis and robust modeling for error compensation on a cnc turning center. Int. J. Mach. Tools Manuf. 1999, 39, 367–1381. [Google Scholar] [CrossRef]
- Donmez, M.A.; Hahn, M.H.; Soons, J.A. A novel cooling system to reduce thermally-induced errors of machine tools. CIRP Ann. 2007, 56, 521–524. [Google Scholar] [CrossRef]
- Miao, E.; Liu, Y.; Liu, H. Study on the effects of changes in temperature-sensitive points on thermal error compensation model for CNC machine tool. Int. J. Mach. Tools Manuf. 2015, 97, 50–59. [Google Scholar] [CrossRef]
- Li, F. Research on modeling and prediction methods of thermal errors in heavy CNC machine tools. J. Mech. Eng. 2016, 52, 11. [Google Scholar]
- Tsai, H.C. Thermal Deformation Prediction of Three-Axis CNC Tooling Machine Based on Full Machine Temperature Rise Model. Master’s Thesis, Institute of Electrical Engineering, National Kaohsiung First University of Science and Technology, Kaohsiung, Taiwan, 2018. [Google Scholar]
- Liu, Q.; Yan, J.; Truong, D.C.; Zhou, Z.; Xu, W.; Ji, C. Identification and optimal selection of temperature-sensitive measuring points of thermal error compensation on a heavy-duty machine tool. Int. J. Adv. Manuf. Tech. 2016, 85, 345–353. [Google Scholar] [CrossRef]
- Li, B.; Tian, X.; Zhang, M. Thermal error modeling of machine tool spindle based on the improved algorithm optimized BP neural network. Int. J. Adv. Manuf. Tech. 2019, 105, 1497–1505. [Google Scholar] [CrossRef]
- Fu, G.; Gong, H.; Gao, H.; Gu, T.; Cao, Z. Integrated thermal error modeling of machine tool spindle using a chicken swarm optimization algorithm-based radial basic function neural network. Int. J. Adv. Manuf. Tech. 2019, 105, 2039–2055. [Google Scholar] [CrossRef]
- Liu, H.; Miao, E.; Zhang, L.; Li, L.; Hou, Y.; Tang, D. Thermal error modeling for machine tools: Mechanistic analysis and solution for the pseudocorrelation of temperature-sensitive. IEEE Access 2020, 8, 63497–63513. [Google Scholar] [CrossRef]
- Yue, H.T.; Guo, C.G.; Li, Q.; Zhao, L.J.; Hao, G.B. Thermal error modeling of CNC milling machining spindle based on an adaptive chaos particle swarm optimization algorithm. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 427. [Google Scholar] [CrossRef]
- Yue, H.T.; Gua, C.G.; Li, Q.; Zhao, L.J.; Hao, G.B. Thermal error modeling of CNC milling machine tool spindle system in load machining: Based on optimal specific cutting energy. J. Braz. Soc. Mech. Sci. 2020, 46, 2020. [Google Scholar] [CrossRef]
- Li, G.; Tang, X.; Li, Z.; Xu, K.; Li, C. The temperature-sensitive point screening for spindle thermal error modeling based on IBGOA-feature selection. Precis. Eng. 2022, 73, 140–152. [Google Scholar] [CrossRef]
- Kumar, S.; Srinivasu, D.S. Optimal number of thermal hotspots selection on motorized milling spindle to predict its thermal deformation. Mater. Today-Proc. 2022, 62, 3376–3385. [Google Scholar] [CrossRef]
- Pahk, H.J.; Lee, S.W. Thermal error measurement and real time compensationsystem for the cnc machine tools incorporating the spindle thermal error and the feed axis thermal error. Int. J. Adv. Manuf. Tech. 2002, 20, 487–494. [Google Scholar] [CrossRef]
- Chang, Y.T. Application of Inverted Transfer Class Neural Network for Thermal Displacement Measurement and Compensation of Vertical Machining Machines. Master’s Thesis, Department of Mechanical Engineering, National Chin-Yi University, Taiwan, 2014. [Google Scholar]
- Chung, M.S. Application of Neural-like Network for Thermal Error Compensation of a CNC Flat-Processing Machine. Master’s Thesis, Department of Information Engineering, School of Electrical Engineering, National Chin-Yi University, Taiwan, 2018. [Google Scholar]
- Huang, L.; Liu, Y.; Du, L.; Yang, H. Thermal error analysis, modeling and compensation of five-axis machine tools. J. Mech. Sci. Technol. 2020, 34, 4295–4305. [Google Scholar] [CrossRef]
- Mares, M.; Horejs, O.; Havlik, L. Thermal error compensation of a 5-axis machine tool using indigenous temperature sensors and CNC integrated Python code validated with a machined test piece. Precis. Eng. 2021, 66, 21–30. [Google Scholar] [CrossRef]
- Huang, T.C. Deep Neural Networks for Thermal Error Estimation On a Dual-Axis Platform. Master’s Thesis, Institute of Mechanical Engineering, National Chung Cheng University, Taiwan, 2018. [Google Scholar]
- Liu, J.; Ma, C.; Gui, H.; Wang, S. Thermally-induced error compensation of spindle system based on long short term memory neural networks. Appl. Soft Comput. 2021, 102, 107094. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, X.; Zhang, G.; Jiang, W.; Li, B. Thermal error analysis and modeling for high-speed motorized spindles based on LSTM-CNN. Int. J. Adv. Manuf. Tech. 2022, 121, 3243–3257. [Google Scholar] [CrossRef]
- Guo, J.; Xiong, Q.; Chen, J.; Miao, E.; Wu, C.; Zhu, Q.; Yang, Z.; Chen, J. Study of static thermal deformation modeling based on a hybrid CNN-LSTM model with spatiotemporal correlation. Int. J. Adv. Manuf. Tech. 2022, 119, 2601–2613. [Google Scholar] [CrossRef]
- Pearson’s Correlation Coefficient. Available online: https://chih-sheng-huang821.medium.com (accessed on 26 December 2022).
- Deep Learning—LSTM Model Solution. Available online: https://antkillerfarm.github.io/dl/2017/06/22/Deep_Learning_7.html (accessed on 26 December 2022).
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crucial Temperature Sensors | |
|---|---|
| Sensor No. | Location |
| 1 | Upper spindle |
| 3 | Upper overhang |
| 4 | Lower overhang |
| 5 | Upper overhang |
| 6 | Lower overhang |
| 23 | Y-axis bearing |
| 28 | Z-axis slider |
| Axial Direction | Thermal Error without Real-Time Compensation (µm) | Thermal Error with Real-Time Compensation (µm) |
|---|---|---|
| X | 11 µm | 6 µm |
| Y | 35 µm | 3 µm |
| Z | −51 µm | −24 µm |
| X-Axis | ||
|---|---|---|
| Time | Thermal Error without Real-Time Compensation | Thermal Error with Real-Time Compensation |
| 2 h | 7 | 3 |
| 4 h | 8 | 3 |
| 6 h | 7 | 2 |
| 8 h | 7 | 3 |
| Y-Axis | ||
|---|---|---|
| Time | Thermal Error without Real-Time Compensation | Thermal Error with Real-Time Compensation |
| 2 h | 38 | 4 |
| 4 h | 59 | 9 |
| 6 h | 67 | 14 |
| 8 h | 74 | 21 |
| Z-Axis | ||
|---|---|---|
| Time | Thermal Error without Real-Time Compensation | Thermal Error with Real-Time Compensation |
| 2 h | −37 | −3 |
| 4 h | −52 | −12 |
| 6 h | −57 | −15 |
| 8 h | −64 | −20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, D.-K.; Huang, H.-C.; Feng, T.-C. Prediction of Thermal Deformation and Real-Time Error Compensation of a CNC Milling Machine in Cutting Processes. Machines 2023, 11, 248. https://doi.org/10.3390/machines11020248
Nguyen D-K, Huang H-C, Feng T-C. Prediction of Thermal Deformation and Real-Time Error Compensation of a CNC Milling Machine in Cutting Processes. Machines. 2023; 11(2):248. https://doi.org/10.3390/machines11020248
Chicago/Turabian StyleNguyen, Dang-Khoa, Hua-Chih Huang, and Tzu-Chen Feng. 2023. "Prediction of Thermal Deformation and Real-Time Error Compensation of a CNC Milling Machine in Cutting Processes" Machines 11, no. 2: 248. https://doi.org/10.3390/machines11020248
APA StyleNguyen, D.-K., Huang, H.-C., & Feng, T.-C. (2023). Prediction of Thermal Deformation and Real-Time Error Compensation of a CNC Milling Machine in Cutting Processes. Machines, 11(2), 248. https://doi.org/10.3390/machines11020248