

Application of Multiple Deep Neural Networks to Multi-Solution Synthesis of Linkage Mechanisms
Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Year | Mechanism | Curve Descriptor | NN Model | Additional Features (Selected Portions Only) |
|---|---|---|---|---|---|
| Hoskins & Kramer [16] | 1993 | Crank-Rocker | Power spectrum | Radial basis NN | Hybridizing a gradient-based numerical method |
| Yannou & Vasiliu [17] | 2001 | Crank-Rocker | Fourier series | MLFFNN | Developing an integrated predesign platform RealisMe |
| Xie & Chen [23] | 2007 | Crank-Rocker | Fourier series | MLFFNN | Extending FD to the image space of kinematic mapping |
| Erkaya & Uzmay [24] | 2009 | Slider-Crank | Cartesian positions | MLFFNN | Modelling joint clearance as a massless link |
| Galán-Marín et al. [13] | 2009 | Crank-Rocker | Wavelet | MLFFNN | Sampling precise points at a non-constant time interval |
| Khan et al. [18] | 2015 | Crank-Rocker | Fourier series | MLFFNN | Hybridizing a local optimization procedure |
| Ahmadi et al. [25] | 2016 | General four-bar | Cartesian positions | GMDH-type NNs | Integrating game theory and multi-objective optimization |
| Li & Chen [19] | 2017 | General four-bar | Fourier series | MLFFNN | Proposing arc length normalization |
| Deshpande & Purwar [21] | 2018 | General four-bar | Signature method | Auto-Encoder | Integrating machine learning and computational kinematics for defect-free and part-to-whole synthesis |
| Mo et al. [26] | 2019 | Crank-Rocker | Fourier series | MLFFNN | Obtaining a high precision linkager mechanism |
| Yim et al. [27] | 2021 | General four-bar | Fourier series | Deep MLFFNN | Determining mechanism topology and end-effector location simultaneously based on big data |
| Kapsalyamov et al. [28] | 2022 | Six-linkage-bar | Cartesian positions | Deep MLFFNN | Integrating computational kinematics and machine learning to syntherize two joint trajectories (ankle and knee) |
| Yim et al. [29] | 2023 | Spatial linkage | Fourier series | Deep MLFFNN | Making the NN handle multi-class classification to improve the previous planar linkage synthesis approach |
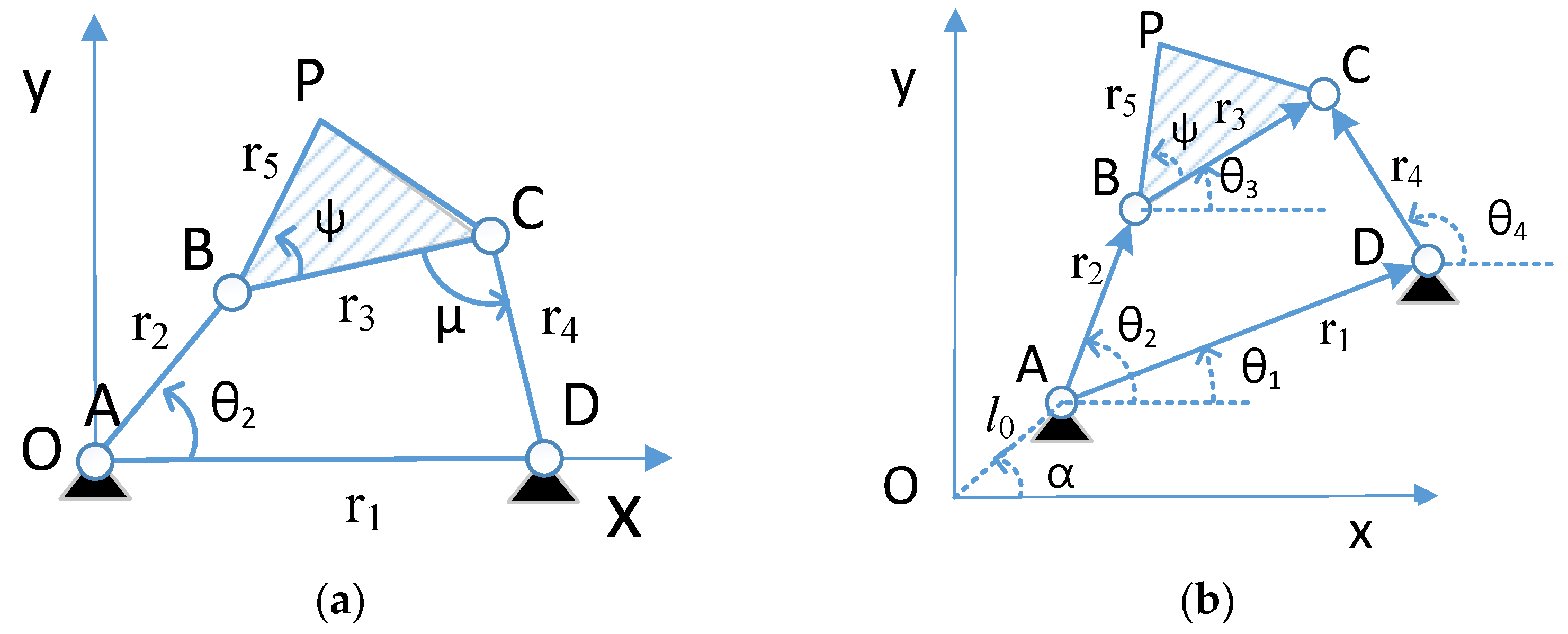
2. Problem Definition and Formulation
2.1. Fourier Descriptor Formulation
2.2. Fourier Coefficient Normalizing and Learning
2.3. One-to-Many Mapping Issues
- (1)
- Cognate linkages
- (2)
- Factors of normalization
- (3)
- Incomplete coupling at precise points
2.4. Learning One-to-Many Mapping by Neural Networks
3. Synthesis Using Multiple DNNs
3.1. Dataset Partition and Generation for DNN Training Flow
3.1.1. Multi-Solution Distribution Evaluation by Random Restart Local Searches (MDE-RRLS)
| Algorithm 1: MDE-RRLS |
Input:
|
Begin
|
3.1.2. Dataset Generation & Partition
3.1.3. Training DNNs by Partitioned Datasets
3.2. Predicting Flow to Obtain One or Multiple Solutions
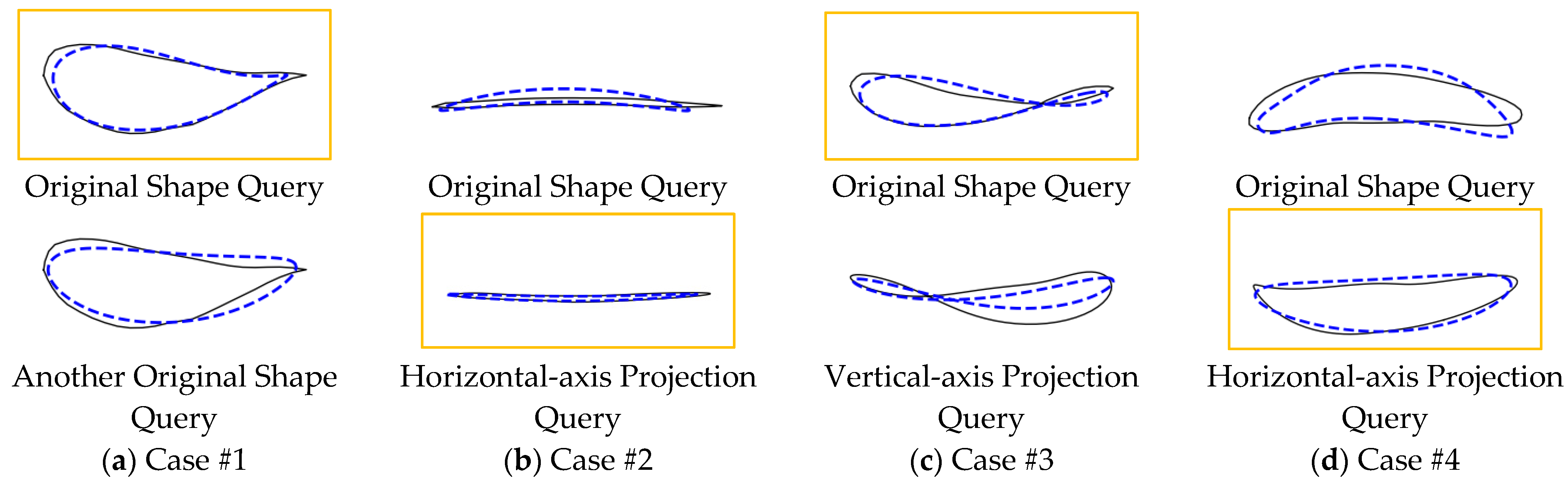
3.2.1. Multi-Facet Query
3.2.2. Voting Method
4. Experiments and Discussions
4.1. MDE-RRLS Evaluation and Selection of Subspace Partitions
4.2. Training Parameter Selection
4.3. Comparison with Literature Cases
5. Application to Design an Industrial Six-Bar Ladle Mechanism
5.1. Design Precise Points and Partition Schemes
5.2. Multi-DNNs Training Results
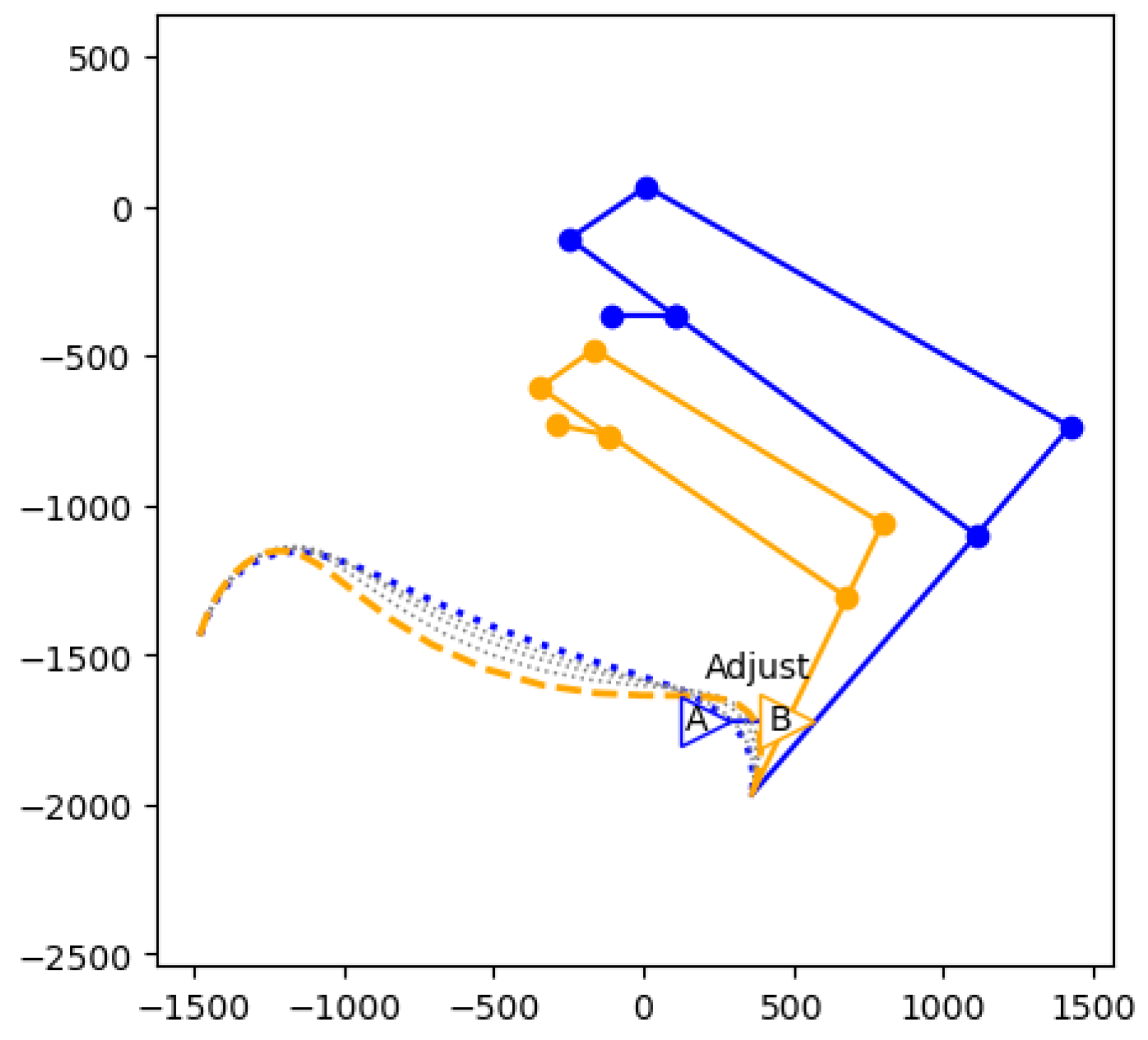
5.3. Design Refinement in a Short-Time Response
6. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, X.; Wei, S.; Liao, Q.; Zhang, Y. A Novel Analytical Method for Function Generation Synthesis of Planar Four-Bar Linkages. Mech. Mach. Theory 2016, 101, 222–235. [Google Scholar] [CrossRef]
- Calvetti, D.; Somersalo, E. Inverse Problems: From Regularization to Bayesian Inference. Wiley Interdiscip. Rev. Comput. Stat. 2018, 10, e1427. [Google Scholar] [CrossRef]
- Lee, W.-T.; Russell, K. Developments in Quantitative Dimensional Synthesis (1970–Present): Four-Bar Path and Function Generation. Inverse Probl. Sci. Eng. 2018, 26, 1280–1304. [Google Scholar] [CrossRef]
- Hernández, A.; Muñoyerro, A.; Urízar, M.; Amezua, E. Comprehensive Approach for the Dimensional Synthesis of a Four-Bar Linkage Based on Path Assessment and Reformulating the Error Function. Mech. Mach. Theory 2021, 156, 104126. [Google Scholar] [CrossRef]
- Cabrera, J.; Simon, A.; Prado, M. Optimal Synthesis of Mechanisms with Genetic Algorithms. Mech. Mach. Theory 2002, 37, 1165–1177. [Google Scholar] [CrossRef]
- Halicioglu, R.; Jomartov, A.; Kuatova, M. Optimum Design and Analysis of a Novel Planar Eight-Bar Linkage Mechanism. Mech. Based Des. Struct. Mach. 2023, 51, 5231–5252. [Google Scholar] [CrossRef]
- Liu, X.; Ding, J.; Wang, C. Design Framework for Motion Generation of Planar Four-Bar Linkage Considering Clearance Joints and Dynamics Performance. Machines 2022, 10, 136. [Google Scholar] [CrossRef]
- Eqra, N.; Abiri, A.H.; Vatankhah, R. Optimal Synthesis of a Four-Bar Linkage for Path Generation Using Adaptive PSO. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 469. [Google Scholar] [CrossRef]
- Sancibrian, R.; Sedano, A.; Sarabia, E.G.; Blanco, J.M. Hybridizing Differential Evolution and Local Search Optimization for Dimensional Synthesis of Linkages. Mech. Mach. Theory 2019, 140, 389–412. [Google Scholar] [CrossRef]
- Acharyya, S.; Mandal, M. Performance of EAs for Four-Bar Linkage Synthesis. Mech. Mach. Theory 2009, 44, 1784–1794. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, G.; Han, X. A Novel Method for Uncertainty Inverse Problems and Application to Material Characterization of Composites. Exp. Mech. 2008, 48, 539–548. [Google Scholar] [CrossRef]
- Pathak, V.K.; Singh, R.; Sharma, A.; Kumar, R.; Chakraborty, D. A Historical Review on the Computational Techniques for Mechanism Synthesis: Developments Up to 2022. Arch. Comput. Methods Eng. 2023, 30, 1131–1156. [Google Scholar] [CrossRef]
- Galán-Marín, G.; Alonso, F.J.; Del Castillo, J.M. Shape Optimization for Path Synthesis of Crank-Rocker Mechanisms Using a Wavelet-Based Neural Network. Mech. Mach. Theory 2009, 44, 1132–1143. [Google Scholar] [CrossRef]
- McGarva, J.; Mullineux, G. Harmonic Representation of Closed Curves. Appl. Math. Model. 1993, 17, 213–218. [Google Scholar] [CrossRef]
- Sharma, S.; Purwar, A.; Jeffrey Ge, Q. An Optimal Parametrization Scheme for Path Generation Using Fourier Descriptors for Four-Bar Mechanism Synthesis. J. Comput. Inf. Sci. Eng. 2019, 19, 014501. [Google Scholar] [CrossRef]
- Hoskins, J.C.; Kramer, G.A. Synthesis of Mechanical Linkages Using Artificial Neural Networks and Optimization. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; p. 822-J. [Google Scholar]
- Vasiliu, A.; Yannou, B. Dimensional Synthesis of Planar Mechanisms Using Neural Networks: Application to Path Generator Linkages. Mech. Mach. Theory 2001, 36, 299–310. [Google Scholar] [CrossRef]
- Khan, N.; Ullah, I.; Al-Grafi, M. Dimensional Synthesis of Mechanical Linkages Using Artificial Neural Networks and Fourier Descriptors. Mech. Sci. 2015, 6, 29–34. [Google Scholar] [CrossRef]
- Li, X.; Chen, P. A Parametrization-Invariant Fourier Approach to Planar Linkage Synthesis for Path Generation. Math. Probl. Eng. 2017, 2017, 8458149. [Google Scholar] [CrossRef]
- Li, X.; Epitropakis, M.G.; Deb, K.; Engelbrecht, A. Seeking Multiple Solutions: An Updated Survey on Niching Methods and Their Applications. IEEE Trans. Evol. Comput. 2016, 21, 518–538. [Google Scholar] [CrossRef]
- Deshpande, S.; Purwar, A. A Machine Learning Approach to Kinematic Synthesis of Defect-Free Planar Four-Bar Linkages. J. Comput. Inf. Sci. Eng. 2019, 19, 021004. [Google Scholar] [CrossRef]
- Chen, C.-H.; Liu, T.-K.; Huang, I.-M.; Chou, J.-H. Multiobjective Synthesis of Six-Bar Mechanisms under Manufacturing and Collision-Free Constraints. IEEE Comput. Intell. Mag. 2012, 7, 36–48. [Google Scholar] [CrossRef]
- Xie, J.; Chen, Y. Application Back Propagation Neural Network to Synthesis of Whole Cycle Motion Generation Mechanism. In Proceedings of the 12th IFToMM World Congress-Besancon-France, Besançon, France, 17–21 June 2007. [Google Scholar]
- Erkaya, S.; Uzmay, I. Optimization of Transmission Angle for Slider-Crank Mechanism with Joint Clearances. Struct. Multidiscip. Optim. 2009, 37, 493–508. [Google Scholar] [CrossRef]
- Ahmadi, B.; Nariman-zadeh, N.; Jamali, A. Path Synthesis of Four-Bar Mechanisms Using Synergy of Polynomial Neural Network and Stackelberg Game Theory. Eng. Optim. 2017, 49, 932–947. [Google Scholar] [CrossRef]
- Mo, X.; Ge, W.; Zhao, D.; Zhang, Y. Path Synthesis of Crank-Rocker Mechanism Using Fourier Descriptors Based Neural Network. In Recent Advances in Mechanisms, Transmissions and Applications, Proceedings of the Fifth MeTrApp Conference 2019; Springer: Singapore, 2020; pp. 32–41. [Google Scholar]
- Yim, N.H.; Lee, J.; Kim, J.; Kim, Y.Y. Big Data Approach for the Simultaneous Determination of the Topology and End-Effector Location of a Planar Linkage Mechanism. Mech. Mach. Theory 2021, 163, 104375. [Google Scholar] [CrossRef]
- Kapsalyamov, A.; Hussain, S.; Brown, N.A.; Goecke, R.; Hayat, M.; Jamwal, P.K. Synthesis of a Six-Bar Mechanism for Generating Knee and Ankle Motion Trajectories Using Deep Generative Neural Network. Eng. Appl. Artif. Intell. 2023, 117, 105500. [Google Scholar] [CrossRef]
- Yim, N.H.; Ryu, J.; Kim, Y.Y. Big Data Approach for Synthesizing a Spatial Linkage Mechanism. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 7433–7439. [Google Scholar]
- Norton, R.L. Fundamentals of Machine Design; McGraw-Hill: New York, NY, USA, 2004. [Google Scholar]
- Wandling Sr, G.R. Synthesis of Mechanisms for Function, Path, and Motion Generation Using Invariant Characterization, Storage and Search Methods; Iowa State University: Ames, IA, USA, 2000. [Google Scholar]
- Yan, H.S. Mechanisms: Theory and Applications, 1st ed.; McGraw Hill Education (Asia): Singapore, 2016; ISBN 978-981-4660-00-6. [Google Scholar]
- Li, X.; Wei, S.; Liao, Q.; Zhang, Y. A Novel Analytical Method for Four-Bar Path Generation Synthesis Based on Fourier Series. Mech. Mach. Theory 2020, 144, 103671. [Google Scholar] [CrossRef]
- Sherman, S.N.; Hauenstein, J.D.; Wampler, C.W. A General Method for Constructing Planar Cognate Mechanisms. J. Mech. Robot. 2021, 13, 031009. [Google Scholar] [CrossRef]
- Roberts, S. On Three-Bar Motion in Plane Space. Proc. Lond. Math. Soc. 1875, 1, 14–23. [Google Scholar] [CrossRef]
- Kang, Y.-H.; Lin, J.-W.; You, W.-C. Comparative Study on the Synthesis of Path-Generating Four-Bar Linkages Using Metaheuristic Optimization Algorithms. Appl. Sci. 2022, 12, 7368. [Google Scholar] [CrossRef]
- Lourenço, H.R.; Martin, O.C.; Stützle, T. Iterated Local Search: Framework and Applications. In Handbook of Metaheuristics; Springer: Boston, MA, USA, 2019; pp. 129–168. [Google Scholar]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Dubey, S.R.; Singh, S.K.; Chaudhuri, B.B. Activation Functions in Deep Learning: A Comprehensive Survey and Benchmark. Neurocomputing 2022, 503, 92–108. [Google Scholar] [CrossRef]
- Chen, C.-H.; Liu, T.-K.; Chou, J.-H. A Novel Crowding Genetic Algorithm and Its Applications to Manufacturing Robots. IEEE Trans. Ind. Inform. 2014, 10, 1705–1716. [Google Scholar] [CrossRef]










| Data Set Amount | Mean (Standard Deviation) of Prediction Errors | (Unit: rad) | ||
|---|---|---|---|---|
| 5000 | 0.7309 (0.0132) | 0.3411 (*0.004) | 0.0329 (0.0079) | 0.0372 (0.0149) |
| 10,000 | 0.7404 (0.0039) | 0.3005 (0.0114) | 0.0282 (0.0159) | 0.0547 (0.0213) |
| 50,000 | 0.7655 (0.0001) | 0.2918 (0.0095) | 0.0137 (0.0062) | 0.0232 (0.0106) |
| 2 Regions | MAX (SUM) |
|---|---|
| * r2:2 | 55 (100) |
| r3:2 | 57 (72) |
| r4:2 | 56 (71) |
| Ψ:2 | 13 (22) |
| r5:2 | 55 (76) |
| CFG:2 | 15 (25) |
| 4 Regions | MAX (SUM) |
| Ψ:4 | 6 (11) |
| Ψ:2, CFG:2 | 3 (6) |
| 8 Regions | MAX (SUM) |
| Ψ:4, CFG:2 | 2 (6) |
| Ψ:8 | 2 (6) |
| Data Amount | RMSE of Predictions in Different Partition Methods | Mean (std) | |||||
|---|---|---|---|---|---|---|---|
| Ψ:2 | CFG:2 | Ψ:4 | Ψ:2, CFG:2 | Ψ:8 | Ψ:4, CFG:2 | No Partition | |
| 80,000 | 0.5597 (0.0423) | 0.596 (0.0302) | 0.5349 (0.0202) | *0.5138 (0.0131) | 0.5552 (0.0222) | 0.5162 (0.0223) | 1.4377 (0.0496) |
| 400,000 | 0.3298 (0.023) | 0.4262 (0.0301) | 0.2866 (0.0261) | 0.2758 (0.0171) | 0.3212 (0.013) | 0.2922 (0.014) | 1.3279 (0.0367) |
| 800,000 | 0.277 (0.0167) | 0.3286 (0.0296) | 0.2296 (0.0125) | 0.232 (0.0244) | 0.2488 (0.011) | 0.2368 (0.0132) | 1.2264 (0.0382) |
| 1,600,000 | 0.2452 (0.0181) | 0.2725 (0.0244) | 0.2197 (0.0182) | 0.2139 (0.0227) | 0.2114 (0.0075) | 0.2061 (0.0148) | 1.1914 (0.0262) |
| Study Cases | r1 | r2 | r3 | r4 | r5 | CFG | Projection | ||
|---|---|---|---|---|---|---|---|---|---|
| #1 | −0.52 | 234.23 | 64.62 | 249.61 | 360.60 | 4.22 | 163.67 | 0 | None |
| #2 | −0.27 | 135.82 | 35.68 | 246.41 | 265.25 | 0.02 | 358.53 | 0 | Horizontal |
| #3 | −0.45 | 299.31 | 76.90 | 361.66 | 402.66 | 4.71 | 298.47 | 0 | None |
| #4 | −0.19 | 234.23 | 85.09 | 260.69 | 141.45 | 0.36 | 230.54 | 0 | Horizontal |
| 2 Regions | MAX (SUM) |
|---|---|
| Cy:2 | 28 (32) |
| r1:2 | 16 (28) |
| r2:2 | 23 (26) |
| r3:2 | 17 (23) |
| r4:2 | 20 (25) |
| r5:2 | 19 (22) |
| r6:2 | 13 (18) |
| r7:2 | *9 (14) |
| 4 Regions | MAX (SUM) |
| r7:4 | 3 (8) |
| r7:2, r6:2 | 3 (6) |
| 8 Regions | MAX (SUM) |
| r7:4, r6:2 | 1 (2) |
| r7:8 | 2 (6) |
| DNN No | ox | oy | cx | cy | r1 | r2 | r3 | r4 | r5 | r6 | r7 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 13.92 | 92.89 | 186.72 | 615.26 | 219.84 | 498.5 | 323.27 | 1427.38 | 452.83 | 1058.51 | 964.14 |
| 2 | 62.56 | 186.41 | 215.45 | 710.56 | 207.65 | 467.71 | 301.6 | 1367.77 | 451.54 | 910.34 | 1088.36 |
| 3 | 95.67 | 115.96 | 186.42 | 618.8 | 203.89 | 438.73 | 259.53 | 1851.51 | 550.87 | 1393.61 | 1597.08 |
| 4 | 114.26 | 176.75 | 210.67 | 690.03 | 200.5 | 426.18 | 297.89 | 1505.03 | 450.45 | 1045.28 | 1530.64 |
| 5 | 4.78 | 246.23 | 217.5 | 709.54 | 194.58 | 469.81 | 305.44 | 1352.53 | 347.01 | 1081.34 | 725.82 |
| 6 | 18.19 | 234.81 | 212.45 | 714.23 | 197.21 | 475.72 | 321.05 | 1486.01 | 391.81 | 1094.67 | 1129.86 |
| 7 | 93.63 | 358.67 | 263.03 | 862 | 188.17 | 447.75 | 296.24 | 1470.82 | 371.21 | 1051.77 | 1210.44 |
| 8 | 37.82 | 133.99 | 213.72 | 684.79 | 222.4 | 503.03 | 331 | 1319.76 | 334.43 | 791.37 | 1208.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-H. Application of Multiple Deep Neural Networks to Multi-Solution Synthesis of Linkage Mechanisms. Machines 2023, 11, 1018. https://doi.org/10.3390/machines11111018
Chen C-H. Application of Multiple Deep Neural Networks to Multi-Solution Synthesis of Linkage Mechanisms. Machines. 2023; 11(11):1018. https://doi.org/10.3390/machines11111018
Chicago/Turabian StyleChen, Chiu-Hung. 2023. "Application of Multiple Deep Neural Networks to Multi-Solution Synthesis of Linkage Mechanisms" Machines 11, no. 11: 1018. https://doi.org/10.3390/machines11111018
APA StyleChen, C.-H. (2023). Application of Multiple Deep Neural Networks to Multi-Solution Synthesis of Linkage Mechanisms. Machines, 11(11), 1018. https://doi.org/10.3390/machines11111018