
Early Fault Diagnosis of Rolling Bearing Based on Threshold Acquisition U-Net

Abstract
1. Introduction
- U-Net has a weak ability to extract fault features of vibration signals under low SNR conditions.
2. Methodology
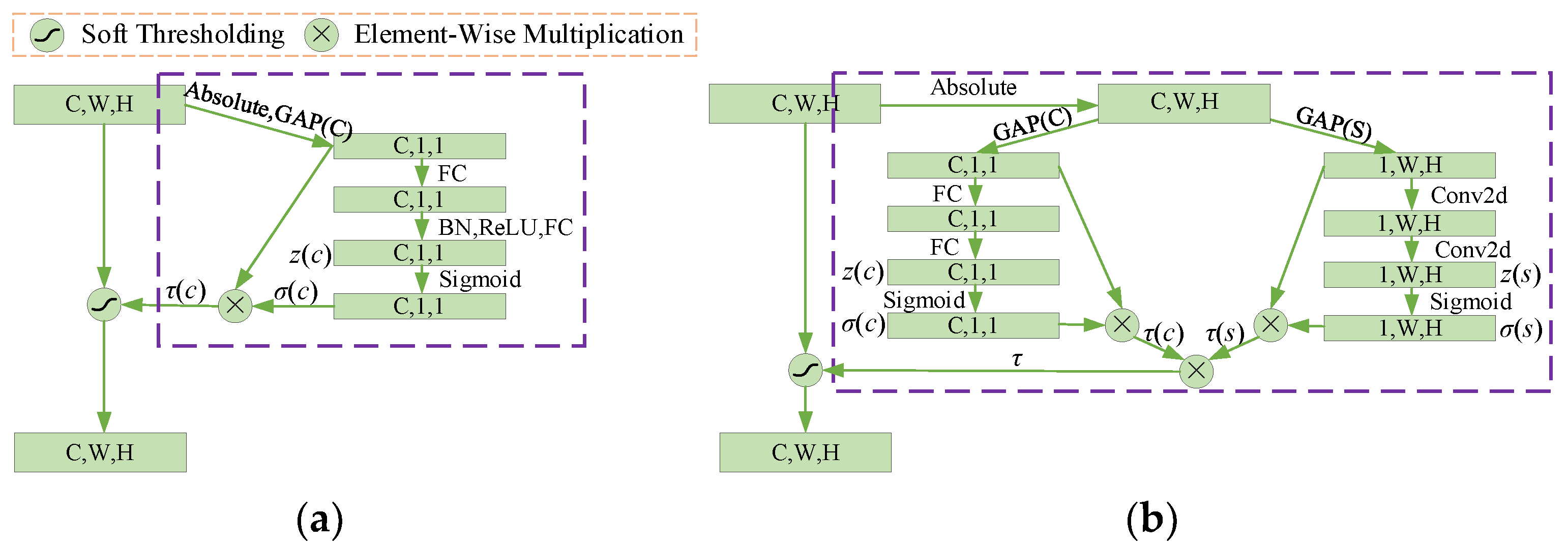
2.1. Channel Spatial Threshold Acquisition Network
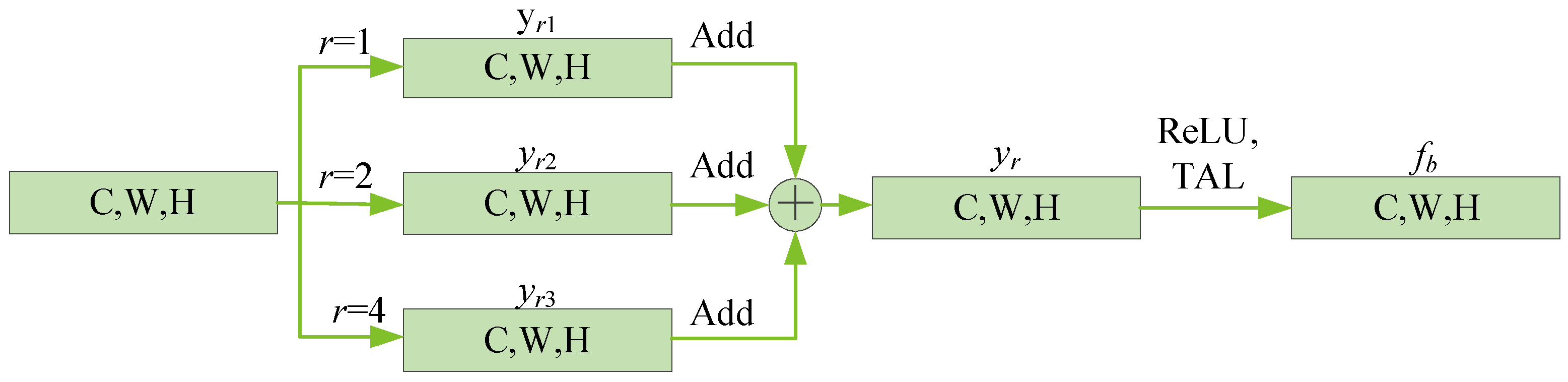
2.2. Dilated Convolution Module
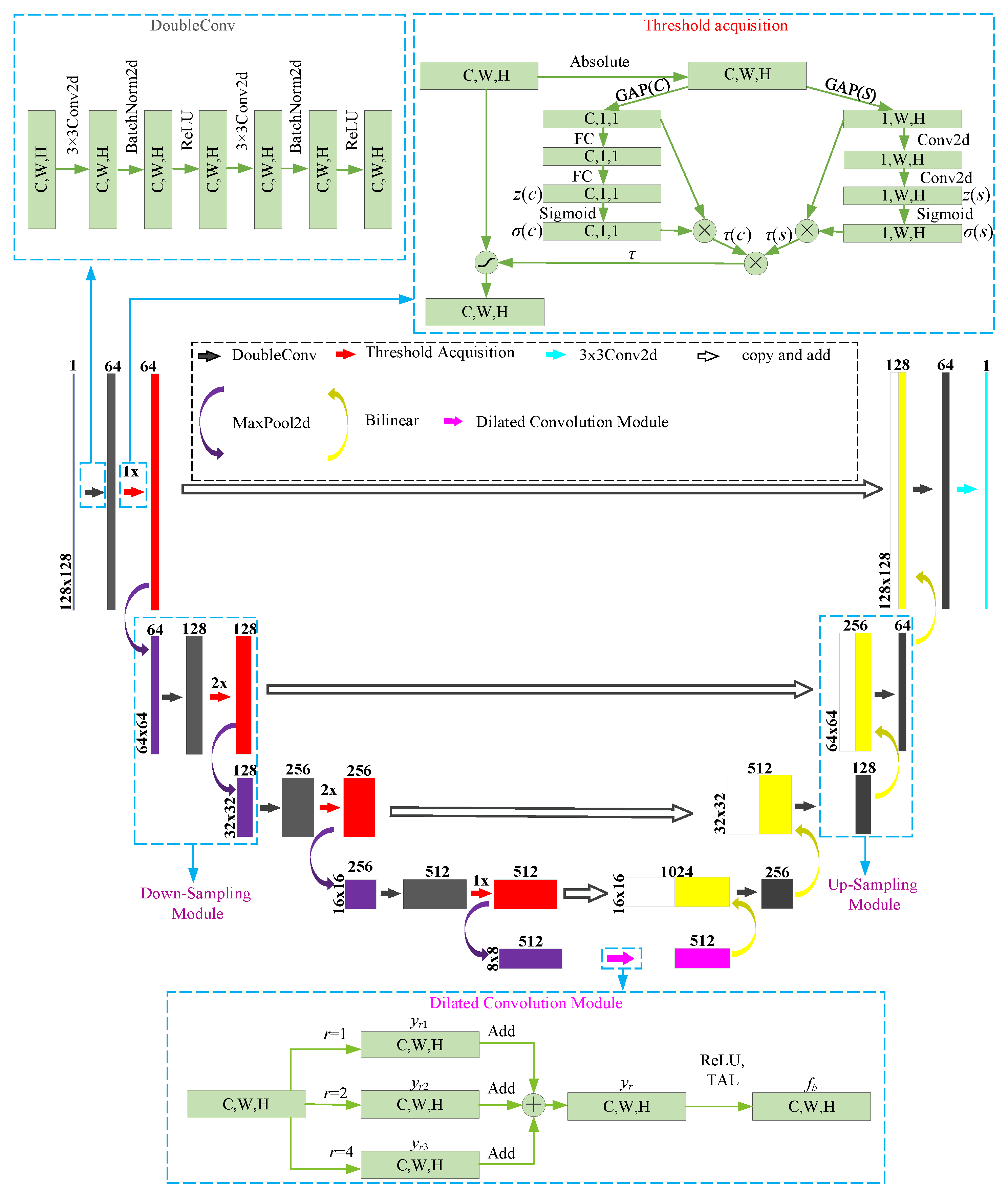
2.3. TA-UNet
2.3.1. Down-Sampling Module
2.3.2. Up-Sampling Module
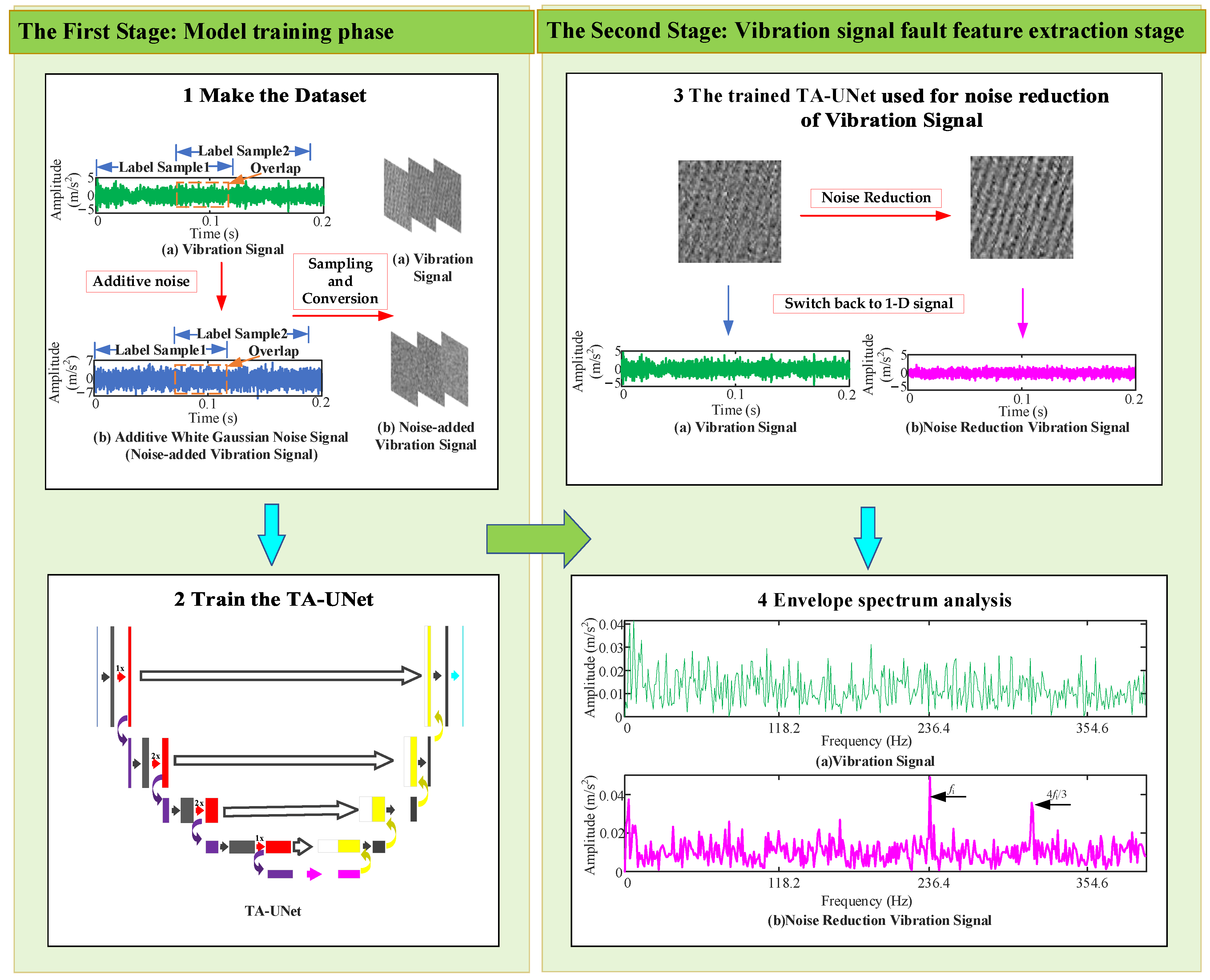
2.4. Early Fault Diagnosis Method of Rolling Bearing
3. Validation of TA-UNet Noise Reduction Capability
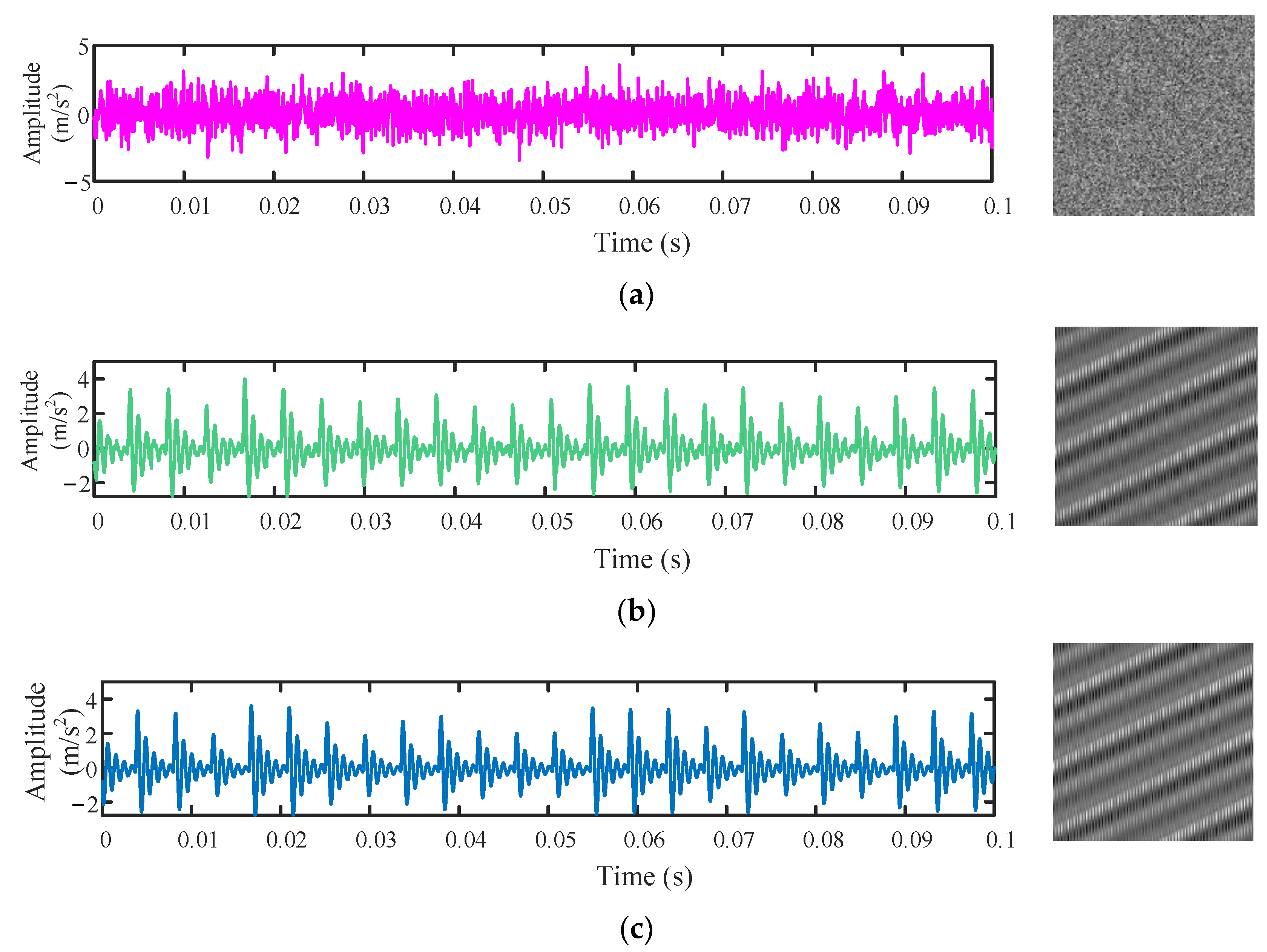
3.1. The Dataset of the Simulation Signal
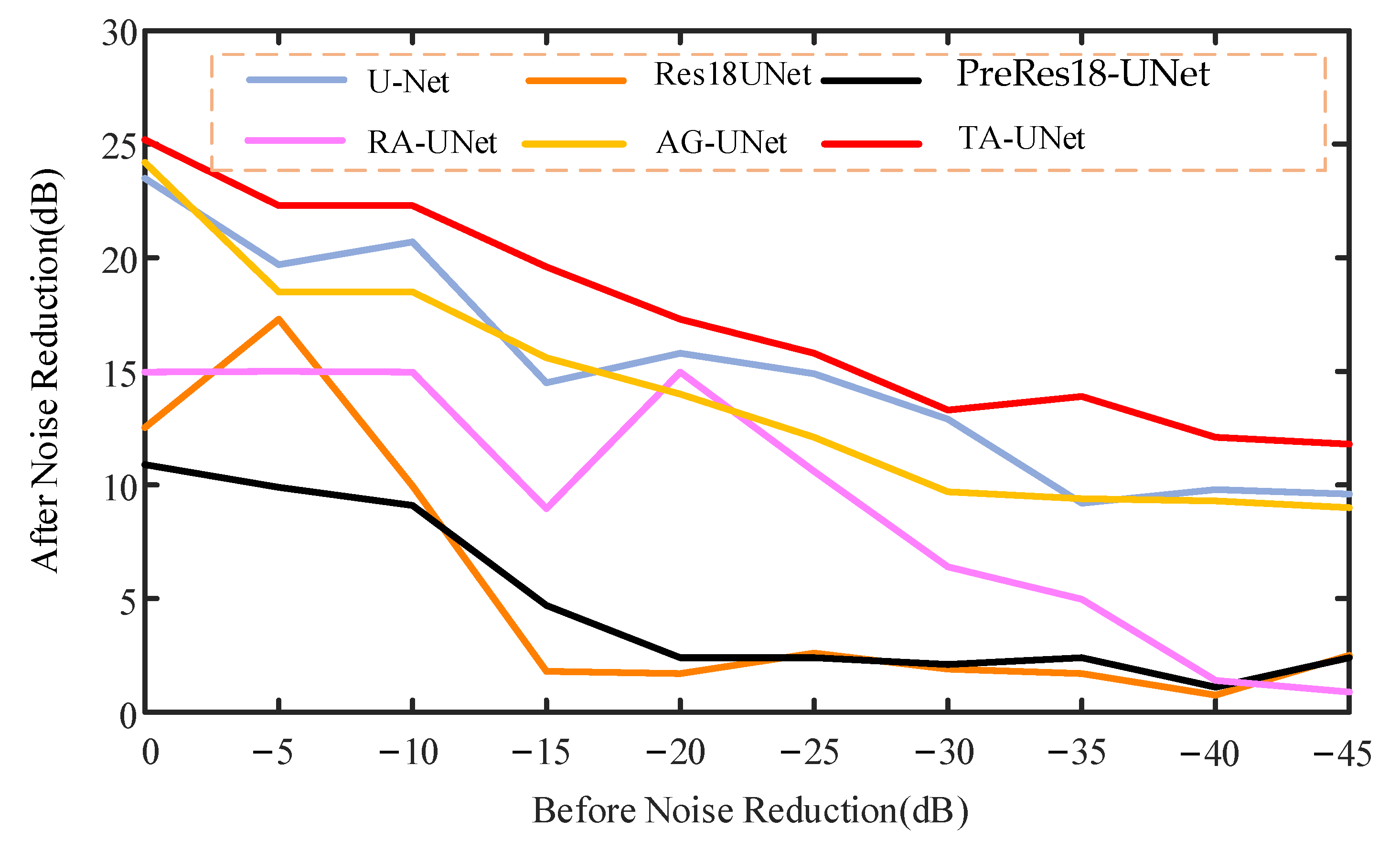
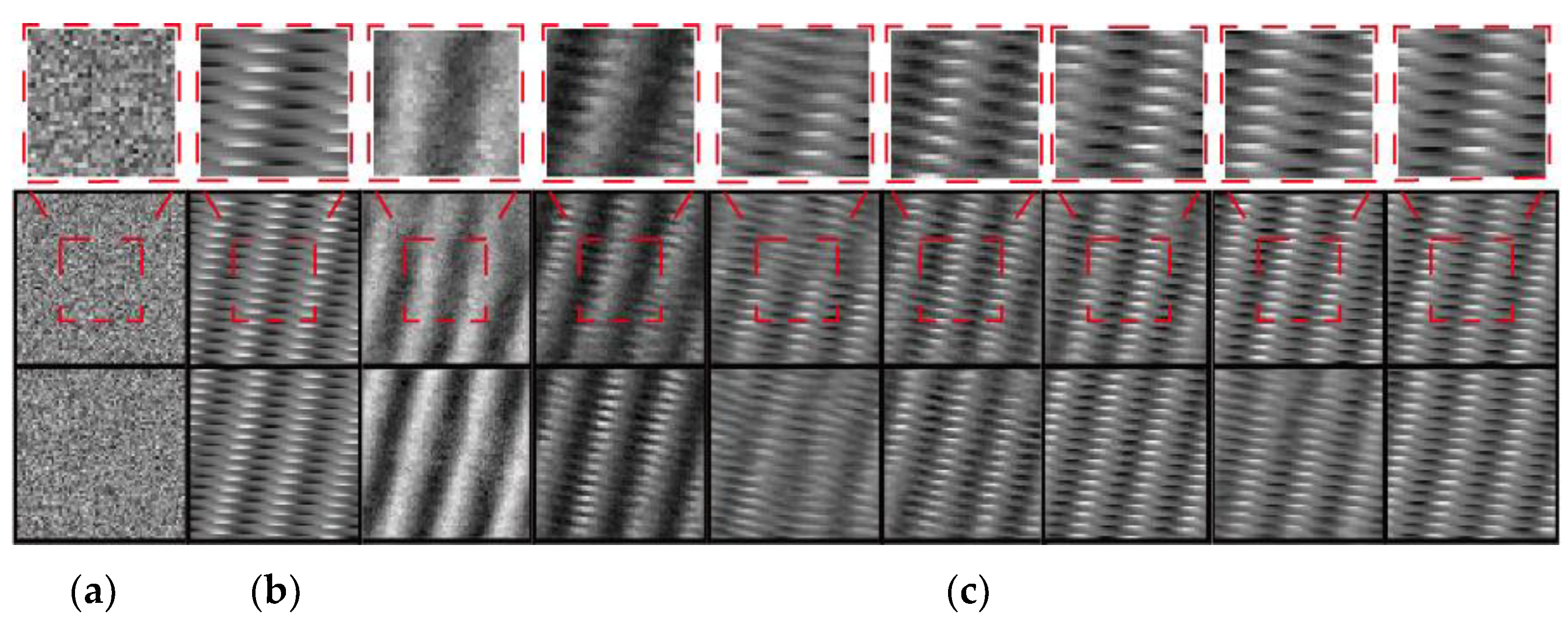
3.2. Comparison of Noise Reduction Results
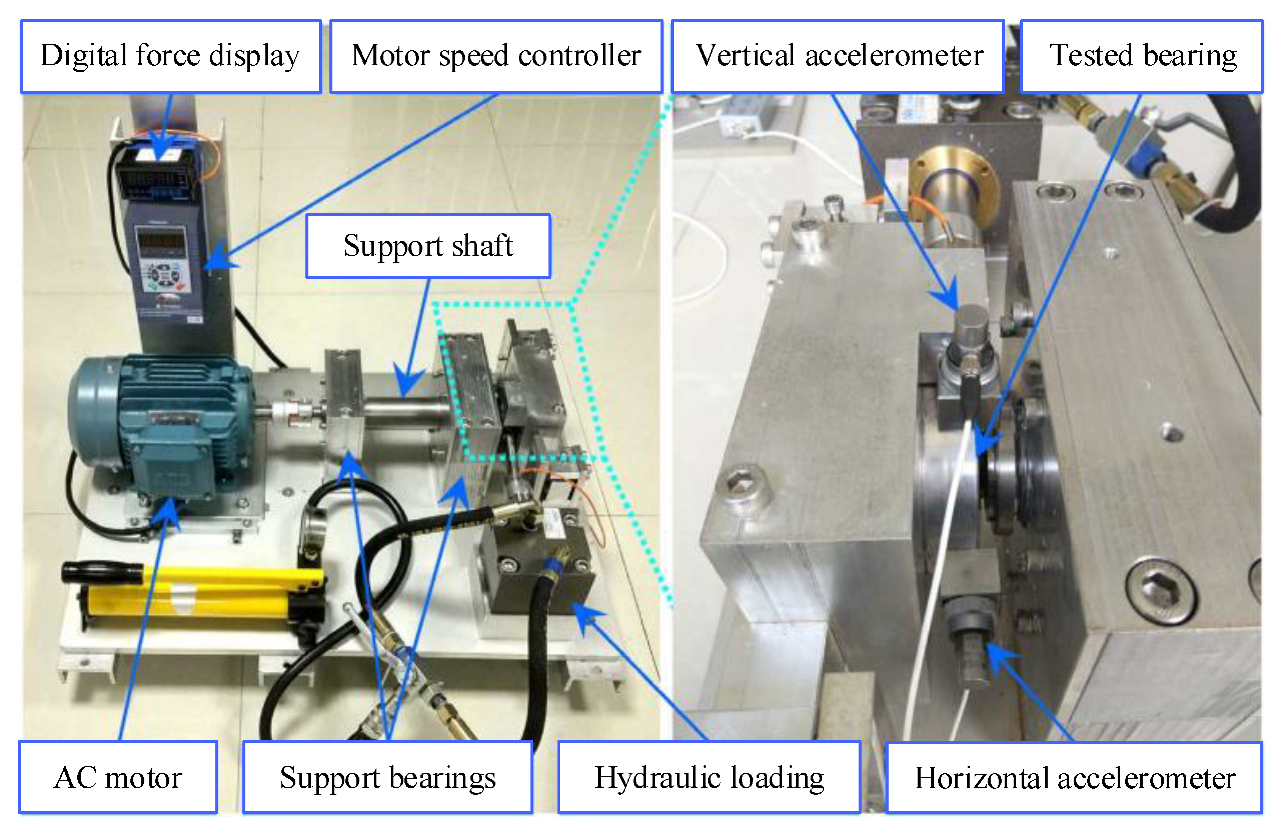
4. Verification of Diagnostic Method
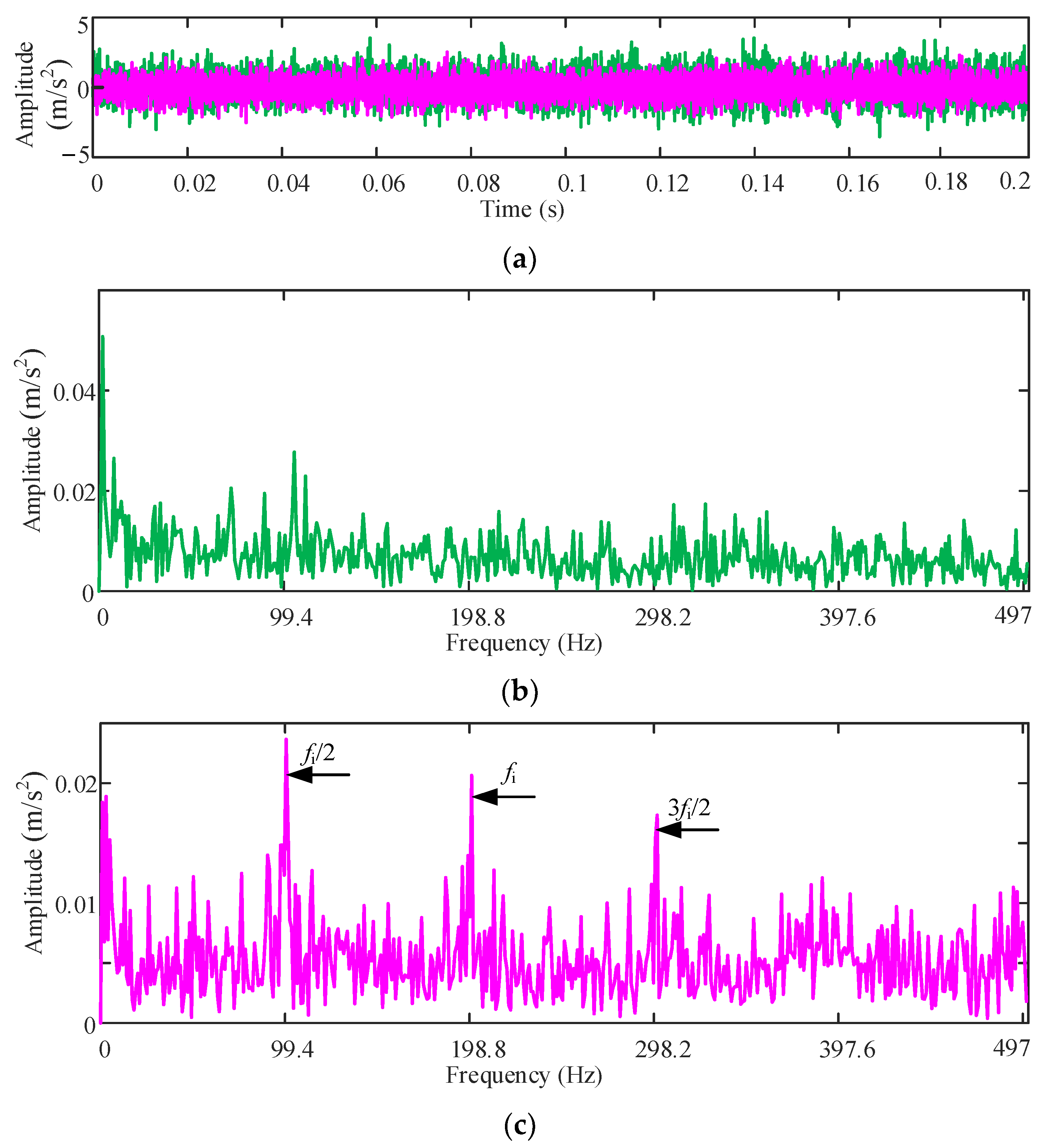
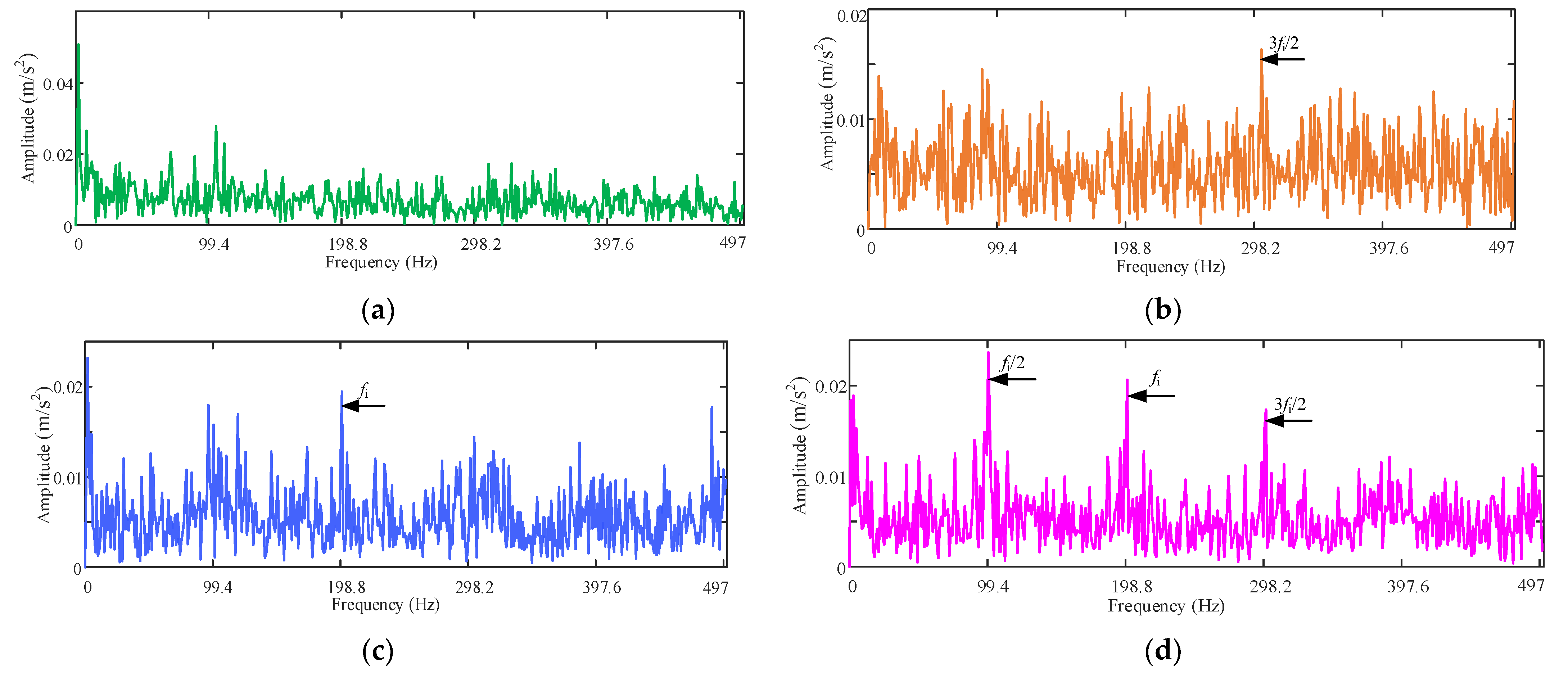
4.1. Case 1
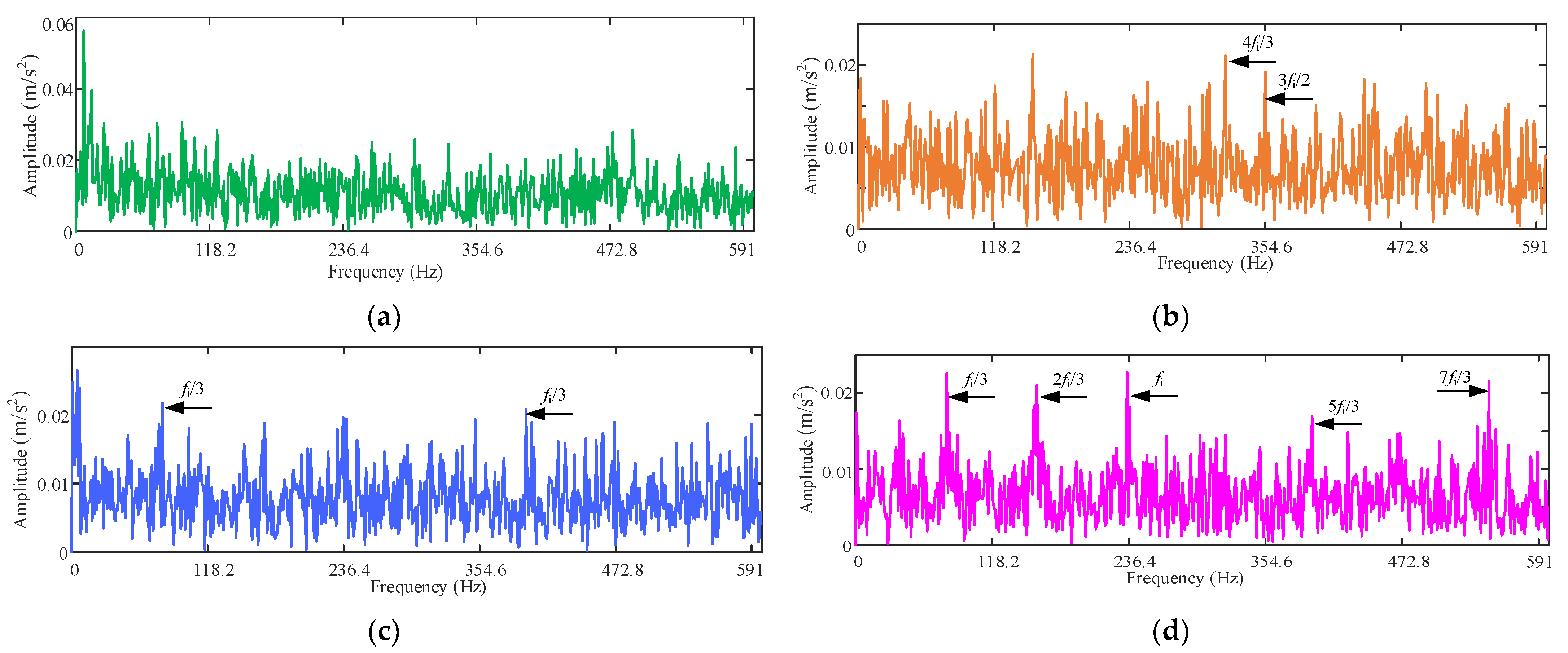
4.2. Case 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gu, R.; Chen, J.; Hong, R.; Wang, H.; Wu, W. Incipient fault diagnosis of rolling bearings based on adaptive variational mode decomposition and Teager energy operator. Measurement 2020, 149, 106941. [Google Scholar] [CrossRef]
- Ren, X.; Zhang, Y.; Xing, Y.; Wang, C. Rolling bearing early fault diagnosis based on angular domain cascade maximum correlation kurtosis deconvolution. Chin. J. Sci. Instrum. 2015, 36, 2104–2111. (In Chinese) [Google Scholar]
- Pang, B.; Tian, T.; Tang, G.J. Fault state recognition of wind turbine gearbox based on generalized multi-scale dynamic time warping. Struct. Health Monit. 2021, 20, 3007–3023. [Google Scholar] [CrossRef]
- Harmouche, J.; Delpha, C.; Diallo, D. Improved Fault Diagnosis of Ball Bearings Based on the Global Spectrum of Vibration Signals. IEEE Trans. Energy Convers. 2015, 30, 376–383. [Google Scholar] [CrossRef]
- Zhang, K.; Tang, B.; Deng, L.; Tan, Q.; Yu, H. A fault diagnosis method for wind turbines gearbox based on adaptive loss weighted meta-ResNet under noisy labels. Mech. Syst. Signal Process. 2021, 161, 107963. [Google Scholar] [CrossRef]
- Feng, K.; Ji, J.C.; Ni, Q.; Beer, M. A review of vibration-based gear wear monitoring and prediction techniques. Mech. Syst. Signal Process. 2023, 182, 109605. [Google Scholar] [CrossRef]
- Lu, P.; Powrie, H.E.; Wood, R.J.; Harvey, T.J.; Harris, N.R. Early wear detection and its significance for condition monitoring. Tribol. Int. 2021, 159, 106946. [Google Scholar] [CrossRef]
- Zhang, H.; Ma, J.; Li, X.; Xiao, S.; Gu, F.; Ball, A. Fluid-asperity interaction induced random vibration of hydrodynamic journal bearings towards early fault diagnosis of abrasive wear. Tribol. Int. 2021, 160, 107028. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Wang, X.; Liu, B.; Liang, X. Early fault diagnosis of rolling bearings based on hierarchical symbol dynamic entropy and binary tree support vector machine. J. Sound Vib. 2018, 428, 72–86. [Google Scholar] [CrossRef]
- Yu, D.; Cheng, J.; Yang, Y. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Process. 2005, 19, 259–270. [Google Scholar] [CrossRef]
- Guo, J.; Zhen, D.; Li, H.; Shi, Z.; Gu, F.; Ball, A.D. Fault feature extraction for rolling element bearing diagnosis based on a multi-stage noise reduction method. Measurement 2019, 139, 226–235. [Google Scholar] [CrossRef]
- Liu, W.Y.; Gao, Q.W.; Ye, G.; Ma, R.; Lu, X.N.; Han, J.G. A novel wind turbine bearing fault diagnosis method based on Integral Extension LMD. Measurement 2015, 74, 70–77. [Google Scholar] [CrossRef]
- Xiong, G.; Przystupa, K.; Teng, Y.; Xue, W.; Huan, W.; Feng, Z.; Qiong, X.; Wang, C.; Skowron, M.; Kochan, O.; et al. Online Measurement Error Detection for the Electronic Transformer in a Smart Grid. Energies 2021, 14, 3551. [Google Scholar] [CrossRef]
- Ni, Q.; Ji, J.C.; Feng, K.; Halkon, B. A fault information-guided variational mode decomposition (FIVMD) method for rolling element bearings diagnosis. Mech. Syst. Signal Process. 2022, 164, 108216. [Google Scholar] [CrossRef]
- Pang, B.; Nazari, M.; Tang, G. Recursive variational mode extraction and its application in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2022, 165, 108321. [Google Scholar] [CrossRef]
- Lu, G.; Wen, X.; He, G.; Yi, X.; Yan, P. Early Fault Warning and Identification in Condition Monitoring of Bearing via Wavelet Packet Decomposition Coupled with Graph. IEEEASME Trans. Mechatron. 2022, 27, 3155–3164. [Google Scholar] [CrossRef]
- Gunawan, R.; Tran, Y.; Zheng, J.; Nguyen, H.; Chai, R. Image Recovery from Synthetic Noise Artifacts in CT Scans Using Modified U-Net. Sensors 2022, 22, 7031. [Google Scholar] [CrossRef] [PubMed]
- Tan, H.; Ou, D.; Zhang, L.; Shen, G.; Li, X.; Ji, Y. Infrared Sensation-Based Salient Targets Enhancement Methods in Low-Visibility Scenes. Sensors 2022, 22, 5835. [Google Scholar] [CrossRef]
- Kim, D.W.; Ryun Chung, J.; Jung, S.W. GRDN: Grouped Residual Dense Network for Real Image Denoising and GAN-Based Real-World Noise Modeling. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 15–20 June 2019; pp. 2086–2094. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- O’Shea, K.; Nash, R. An introduction to convolutional neural networks. arXiv 2015, arXiv:1511.08458. [Google Scholar]
- Gong, L.; Fan, S. A CNN-Based Method for Counting Grains within a Panicle. Machines 2022, 10, 30. [Google Scholar] [CrossRef]
- Piratelo, P.H.M.; de Azeredo, R.N.; Yamao, E.M.; Bianchi Filho, J.F.; Maidl, G.; Lisboa, F.S.M.; de Jesus, L.P.; Penteado Neto, R.D.A.; Coelho, L.D.S.; Leandro, G.V. Blending Colored and Depth CNN Pipelines in an Ensemble Learning Classification Approach for Warehouse Application Using Synthetic and Real Data. Machines 2021, 10, 28. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention. In MICCAI 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Cai, S.; Tian, Y.; Lui, H.; Zeng, H.; Wu, Y.; Chen, G. Dense-UNet: A novel multiphoton in vivo cellular image segmentation model based on a convolutional neural network. Quant. Imaging Med. Surg. 2020, 10, 1275–1285. [Google Scholar] [CrossRef]
- Feng, C.; Zhang, H.; Wang, H.; Wang, S.; Li, Y. Automatic Pixel-Level Crack Detection on Dam Surface Using Deep Convolutional Network. Sensors 2020, 20, 2069. [Google Scholar] [CrossRef] [PubMed]
- Qiu, L.; Cai, W.; Yu, J.; Zhong, J.; Wang, Y.; Li, W.; Chen, Y.; Wang, L. A two-stage ECG signal denoising method based on deep convolutional network. bioRxiv 2020, 2020.03.27.012831. [Google Scholar] [CrossRef]
- Stoller, D.; Ewert, S.; Dixon, S. Wave-u-net: A multi-scale neural network for end-to-end audio source separation. arXiv 2018, arXiv:1806.03185. [Google Scholar]
- Hao, X.; Su, X.; Wang, Z.; Zhang, H. UNetGAN: A Robust Speech Enhancement Approach in Time Domain for Extremely Low Signal-to-noise Ratio Condition. In Proceedings of the Interspeech 2019, Graz, Austria, 15–19 September 2019; pp. 1786–1790. [Google Scholar]
- Shang, Z.; Sun, L.; Xia, Y.; Zhang, W. Vibration-based damage detection for bridges by deep convolutional denoising autoencoder. Struct. Health Monit. 2021, 20, 1880–1903. [Google Scholar] [CrossRef]
- Yu, K.; Fu, Q.; Ma, H.; Lin, T.R.; Li, X. Simulation data driven weakly supervised adversarial domain adaptation approach for intelligent cross-machine fault diagnosis. Struct. Health Monit. 2021, 20, 2182–2198. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 136–144. [Google Scholar] [CrossRef]
- Wang, X.; Shen, C.; Xia, M.; Wang, D.; Zhu, J.; Zhu, Z. Multi-scale deep intra-class transfer learning for bearing fault diagnosis. Reliab. Eng. Syst. Saf. 2020, 202, 107050. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, Z.; Zhou, S.; Feng, K.; Yu, K.; Liu, Z. Supervised Contrastive Learning-Based Domain Adaptation Network for Intelligent Unsupervised Fault Diagnosis of Rolling Bearing. IEEEASME Trans. Mechatron. 2022, 27, 5371–5380. [Google Scholar] [CrossRef]
- Zhao, M.; Zhong, S.; Fu, X.; Tang, B.; Pecht, M. Deep Residual Shrinkage Networks for Fault Diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 4681–4690. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Yang, J.; Zhu, J.; Wang, H.; Yang, X. Dilated MultiResUNet: Dilated multiresidual blocks network based on U-Net for biomedical image segmentation. Biomed. Signal Process. Control 2021, 68, 102643. [Google Scholar] [CrossRef]
- Yu, F.; Koltun, V. Multi-scale context aggregation by dilated convolutions. arXiv 2015, arXiv:1511.07122. [Google Scholar]
- Huang, W.; Yin, G.; Geng, K. Object detection in complex driving scene based on dilated convolution feature adaptive fusion. J. Southeast Univ. Nat. Sci. Ed. 2021, 51, 1076–1083. [Google Scholar]
- Odena, A.; Dumoulin, V.; Olah, C. Deconvolution and Checkerboard Artifacts. Distill 2016, 1, e3. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Stephan, M.; Santra, A. Radar-based Human Target Detection using Deep Residual U-Net for Smart Home Applications. In Proceedings of the 2019 18th IEEE International Conference on Machine Learning and Applications (ICMLA), Boca Raton, FL, USA, 16–19 December 2019; pp. 175–182. [Google Scholar] [CrossRef]
- Jin, Q.; Meng, Z.; Sun, C.; Cui, H.; Su, R. RA-UNet: A hybrid deep attention-aware network to extract liver and tumor in CT scans. Front. Bioeng. Biotechnol. 2020, 8, 605132. [Google Scholar] [CrossRef]
- Yin, Y.; Xu, D.; Wang, X.; Zhang, L. AGUnet: Annotation-guided U-net for fast one-shot video object segmentation. Pattern Recognit. 2021, 110, 107580. [Google Scholar] [CrossRef]
- Yu, J. Health Condition Monitoring of Machines Based on Hidden Markov Model and Contribution Analysis. IEEE Trans. Instrum. Meas. 2012, 61, 2200–2211. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2020, 69, 401–412. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approximate Entropy | Sample Entropy | Fuzzy Entropy | |
|---|---|---|---|
| The vibration signal | 2.029 | 1.936 | 0.193 |
| The noise-reduced vibration signal | 1.473 | 1.346 | 0.170 |
| The amount of the decrease in entropy after the signal is denoised | 27.4% | 30.4% | 12.0% |
| Approximate Entropy | Sample Entropy | Fuzzy Entropy | |
|---|---|---|---|
| The vibration signal | 2.211 | 2.171 | 0.161 |
| The noise-reduced vibration signal | 1.964 | 1.852 | 0.141 |
| The amount of the decrease in entropy after the signal is denoised | 11.2% | 15.0% | 12.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Zhang, L.; Zhang, N.; Yang, S.; Zhang, Y. Early Fault Diagnosis of Rolling Bearing Based on Threshold Acquisition U-Net. Machines 2023, 11, 119. https://doi.org/10.3390/machines11010119
Zhang D, Zhang L, Zhang N, Yang S, Zhang Y. Early Fault Diagnosis of Rolling Bearing Based on Threshold Acquisition U-Net. Machines. 2023; 11(1):119. https://doi.org/10.3390/machines11010119
Chicago/Turabian StyleZhang, Dongsheng, Laiquan Zhang, Naikang Zhang, Shuo Yang, and Yuhao Zhang. 2023. "Early Fault Diagnosis of Rolling Bearing Based on Threshold Acquisition U-Net" Machines 11, no. 1: 119. https://doi.org/10.3390/machines11010119
APA StyleZhang, D., Zhang, L., Zhang, N., Yang, S., & Zhang, Y. (2023). Early Fault Diagnosis of Rolling Bearing Based on Threshold Acquisition U-Net. Machines, 11(1), 119. https://doi.org/10.3390/machines11010119