
Active Braking Strategy Considering VRU Motion States in Curved Road Conditions

Abstract
1. Introduction
2. The Position of the Vehicle and VRUs under Curved Road Conditions
3. The Collision Avoidance Strategy of the Active Braking System under Curved Road Conditions
3.1. Safety Assessment of VRUs
- 1.
- If y < −D
- 2.
- If −D < y < D, VRUs are already in the safe driving area of the vehicle, so at this time, the time = 0.
- 3.
- If y > D,
- 1.
- If y < −D,
- 2.
- If ,
- 3.
- If y > D,
3.2. Safety Distance Model
- 1.
- The distance traveled by the vehicle during the braking coordination period (b–e) is calculated as follows:
- 2.
- During the brake continuous braking period (e–f), the vehicle decelerates at a uniform deceleration rate , its initial speed is , its final speed is 0, and the distance of the vehicle driving is:
3.3. Automobile Collision Avoidance Strategy
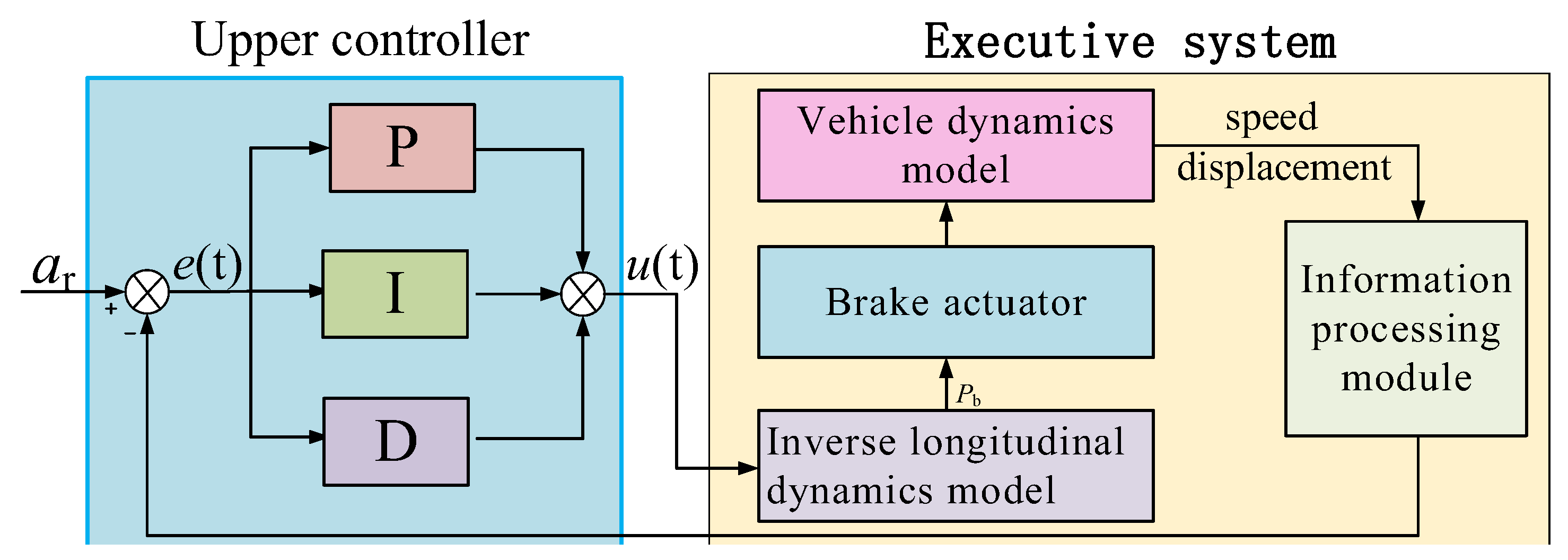
4. Active Brake Controller
4.1. Design of the Upper Controller Based on the Sliding Mode Control
4.2. Design of the Lower Controller Based on Discrete PID Control
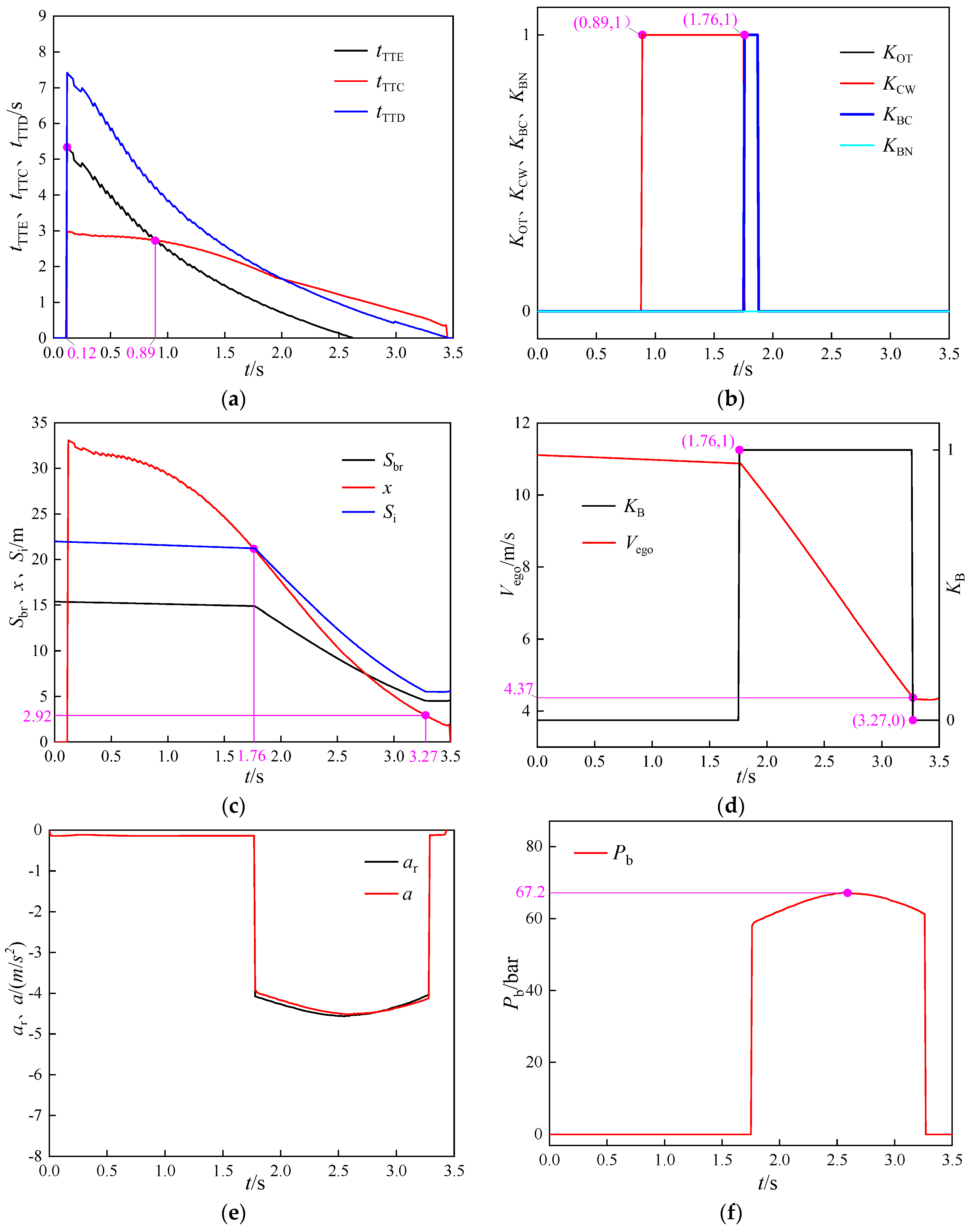
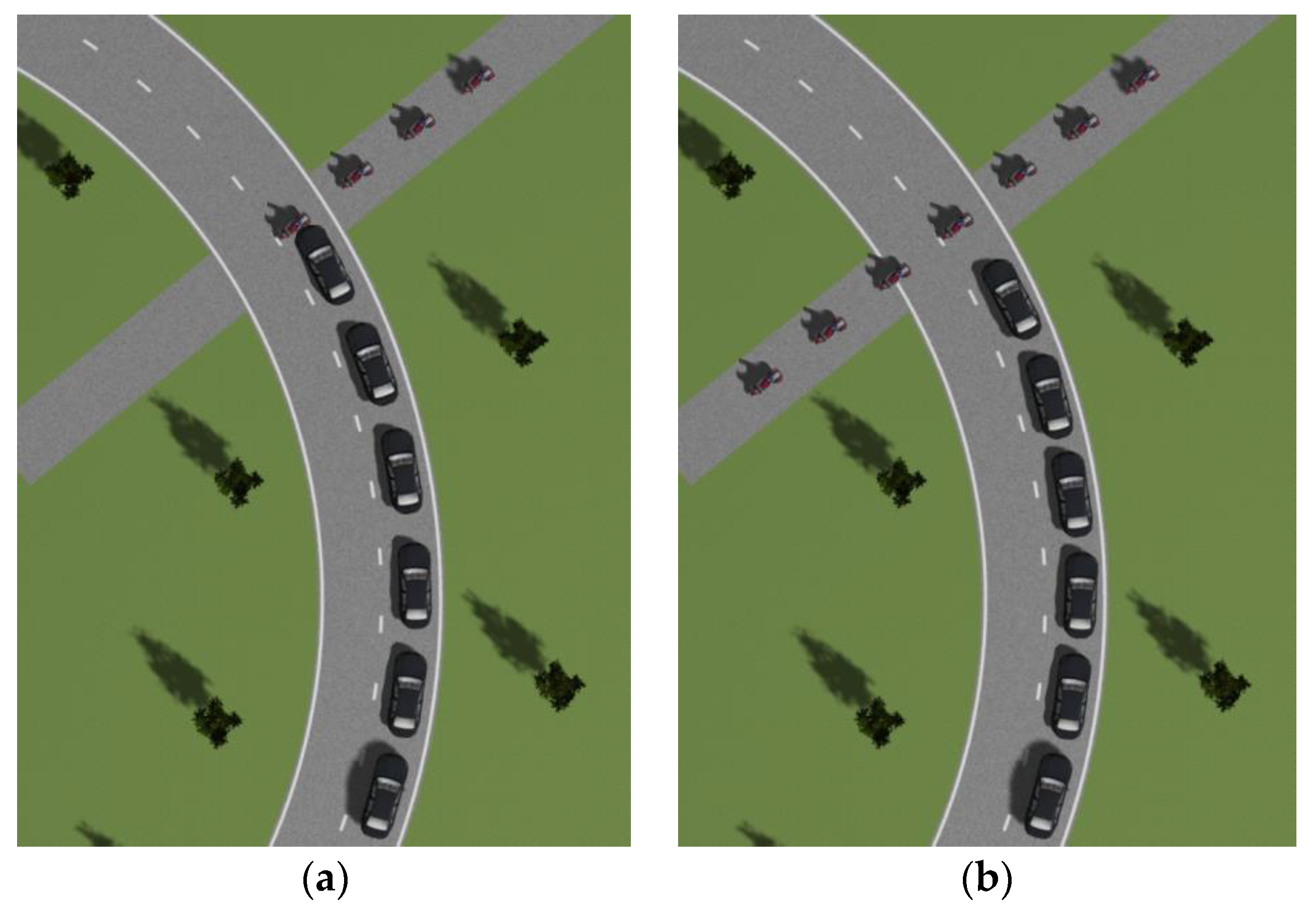
5. Simulation and Verification of the Active Braking Effect under Curved Conditions
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Chen, Q.; Chen, Y.; Bostrom, O.; Ma, Y.; Liu, E. A Comparison Study of Car-To-Pedestrian and Car-To-E-Bike Accidents: Data Source: The China In-Depth Accident Study (CIDAS); Technical Paper: 2014-01-0519; SAE: Hong Kong, China, 2014. [Google Scholar]
- Li, Y.W.; Zhang, X.; Wang, W.J.; Ju, X.F. Factors affecting electric bicycle rider injury in accident based on random forest model. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 196–200. [Google Scholar]
- Zhu, X.Y.; Chu, Z.M.; Zhu, D.A.; Zhu, J.A.; Dai, S. China electric bicycle traffic accident analysis and countermeasures. Urban Transp. China 2021, 1906, 64–70. [Google Scholar]
- Naci, H.; Chisholm, D.; Baker, T.D. Distribution of road traffic deaths by road user group: A global comparison. Inj. Prev. 2009, 15, 5559. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Klauer, S.G.; Fang, Y.; Hankey, J.M.; Antin, J.F.; Perez, M.A.; Lee, S.E.; Dingus, T.A. The effects of age on crash risk associated with driver distraction. Int. J. Epidemiol. 2017, 46, 258–265. [Google Scholar] [CrossRef] [PubMed]
- Rosén, E.; Sander, U. Pedestrian fatality risk as a function of car impact speed. Accid. Anal. Prev. 2009, 41, 536–542. [Google Scholar] [CrossRef]
- Zhao, Y.; Ito, D.; Mizuno, K. AEB effectiveness evaluation based on car-to-cyclist accident reconstructions using video of drive recorder. Traffic Inj. Prev. 2019, 20, 100–106. [Google Scholar] [CrossRef]
- Edwards, M.; Nathanson, A.; Wisch, M. Estimate of potential benefit for Europe of fitting Autonomous Emergency Braking (AEB) systems for pedestrian protection to passenger cars. Traffic Inj. Prev. 2014, 15 (Suppl. S1), S173–S182. [Google Scholar] [CrossRef]
- Themann, P.; Kotte, J.; Raudszus, D.; Eckstein, L. Impact of positioning uncertainty of vulnerable road users on risk minimization in collision avoidance systems. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 1201–1206. [Google Scholar]
- Bachmann, M.; Morold, M.; David, K. On the required movement recognition accuracy in cooperative VRU collision avoidance systems. IEEE Trans. Intell. Transp. Syst. 2020, 223, 1708–1717. [Google Scholar] [CrossRef]
- Nkenyereye, L.; Liu, C.H.; Song, J. Towards secure and privacy preserving collision avoidance system in 5G fog-based Internet of Vehicles. Future Gener. Comp. Syst. 2019, 95, 488–499. [Google Scholar] [CrossRef]
- Eilbrecht, J.; Bieshaar, M.; Zernetsch, S.; Doll, K.; Sick, B.; Stursberg, O. Model-Predictive Planning for Autonomous Vehicles Anticipating Intentions of Vulnerable Road Users by Artificial Neural Networks. In Proceedings of the IEEE SSCI, Honolulu, HI, USA, 27 November–1 December 2017; p. 18. [Google Scholar]
- Park, M.K.; Lee, S.Y.; Kwon, C.K.; Kim, S.W. Design of Pedestrian Target Selection with Funnel Map for Pedestrian AEB System. IEEE Trans. Veh. Technol. 2017, 665, 3597–3609. [Google Scholar] [CrossRef]
- Guo, L.; Ren, Z.J.; Ge, P.S.; Chang, J. Advanced emergency braking controller design for pedestrian protection oriented automotive collision avoidance system. Sci. World J. 2014, 2014, 218–246. [Google Scholar]
- Li, J.X.; Yao, L.; Xu, X.; Cheng, B.; Ren, J.K. Deep reinforcement learning for pedestrian collision avoidance and human-machine cooperative driving. Inform. Sci. 2020, 532, 110–124. [Google Scholar] [CrossRef]
- Lee, H.K.; Shin, S.G.; Kwon, D.S. Design of emergency braking algorithm for pedestrian protection based on Multi-Sensor Fusion. Int. J. Automot. Technol. 2017, 186, 1067–1076. [Google Scholar] [CrossRef]
- Zadeh, R.B.; Ghatee, M.; Eftekhari, H.R. Three-Phases Smartphone-Based Warning System to Protect Vulnerable Road Users Under Fuzzy Conditions. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2086–2098. [Google Scholar] [CrossRef]
- Duan, J.L.; Li, R.J.; Hou, L.; Wang, W.J.; Li, G.F.; Li, S.E.; Cheng, B.; Gao, H.B. Driver braking behavior analysis to improve autonomous emergency braking systems in typical Chinese vehicle-bicycle conflicts. Accid. Anal. Prev. 2017, 108, 7482. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Yu, W.F.; Wang, X.H.; Xu, Q.; Wang, H.G.; Wu, W.G. AEB effectiveness research methods based on reconstruction results of truth Vehicle-to-TW accidents in China. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2029–2039. [Google Scholar] [CrossRef]
- Pan, C.H. Research on Pedestrian-Vehicle Interaction Strategies of Autonomous Vehicles. Master’s Thesis, Zhejiang University, Zhejiang, China, 2021. [Google Scholar]
- Wang, J.J.; Guo, W.B.; Zhang, Y.S. Simulation and verification of the control strategies for Pedestrian Active Collision Avoidance system based on V2X. Automob. Technol. 2022, 5, 4149. [Google Scholar]
- Li, M.H. Research on Pedestrian Collision Avoidance Method for Intelligent Vehicle Based on V2X in Occlusion Environment; Beijing Institute of Technology: Beijing, China, 2018. [Google Scholar]
- Yuan, C.C.; Song, J.H.; He, Y.G.; Jie, S.; Chen, L. Active collision avoidance algorithm of autonomous vehicle based on pedestrian trajectory prediction. J. Jiangsu Univ. 2021, 42, 1–8. [Google Scholar]
- Hallmark, S.; Goswamy, A.; Litteral, T.; Hawkins, N.; Smadi, O. Evaluation of sequential dynamic chevron warning systems on rural Two-Lane curves. Transport. Res. Rec. 2020, 2674, 648–657. [Google Scholar] [CrossRef]
- Wang, B.; Hallmark, S.; Savolainen, P. Crashes and Near-Crashes on horizontal curves along rural Two-Lane highways: Analysis of naturalistic driving data. J. Saf. Res. 2017, 6312, 163–169. [Google Scholar] [CrossRef]
- Qu, C.; Qi, W.Y.; Wu, P. A High Precision and Efficient Time-to-Collision Algorithm for Collision Warning Based V2X Applications. In Proceedings of the 2018 and International Conference on Robotics and Automation Sciences (ICRAS 2018), Wuhan, China, 23–25 June 2018. [Google Scholar]
- Lopez, A.; Sherony, R.; Chien, S.; Li, L.X.; Yi, Q.; Chen, Y.B. Analysis of the Braking Behavior in Pedestrian Automatic Emergency Braking. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Zhang, X.; Yang, W.; Tang, X.; Wang, Y. Lateral distance detection model based on convolutional neural network. IET Intell. Transp. Syst. 2018, 13, 3139. [Google Scholar] [CrossRef]
- Mobayen, S.Y. Fast terminal sliding mode controller design for nonlinear second-order systems with time-varying uncertainties. Complexity 2015, 21, 239–244. [Google Scholar] [CrossRef]
- Ebrahimi, N.; Ozgoli, S.; Ramezani, A. Model-free sliding mode control, theory and application. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2018, 232, 1292–1301. [Google Scholar] [CrossRef]
- Liang, B.; Zhu, Y.Q.; Li, Y.R.; He, P.J.; Li, W.L. Adaptive nonsingular fast terminal sliding mode control for braking systems with Electro-Mechanical actuators based on radial basis function. Energies 2017, 10, 1637. [Google Scholar] [CrossRef]
- Bandyopadhyay, B.; Janardhanan, S. Discrete-Time Sliding Mode Control: A Multidate Output Feedback Approach. In Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Shtessel, Y.; Fridman, L.; Plestan, F. Adaptive sliding mode control and observation. Int. J. Control. 2016, 89, 1743–1746. [Google Scholar] [CrossRef]
- Liu, X.; Sun, X.X.; Dong, W.; Yang, P.S. A new discrete-time sliding mode control method based on restricted variable trending law. Acta Autom. Sin. 2013, 39, 1552–1557. [Google Scholar] [CrossRef]
- Baek, W.; Song, B. Design and validation of a longitudinal velocity and distance controller via hardware-in-the-loop simulation. Int. J. Automot. Technol. 2009, 10, 95–102. [Google Scholar] [CrossRef]
- Lee, M.H.; Park, H.G.; Lee, S.H.; Yoon, K.S.; Lee, K.S. An adaptive cruise control system for autonomous vehicles. Int. J. Precis Eng. Man. 2013, 14, 373–380. [Google Scholar] [CrossRef]
- Gounis, K.; Bassiliades, N. Intelligent momentary assisted control for autonomous emergency braking. Simul. Model. Pract. Theory 2021, 115, 102–450. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, X.; Lei, Q.; Cheng, X. Research on longitudinal active collision avoidance of autonomous emergency braking pedestrian system (AEB-P). Sensors 2019, 19, 4671. [Google Scholar] [CrossRef]
- Zhang, M.F.; Li, M.; Chen, Z.F.; Wang, P.W.; Cheng, W.D. Left-turn motion planning of autonomous vehicles at unsignalized intersections in an environment of heterogeneous traffic flow containing autonomous and Human-driven vehicles. China J. Highw. Transp. 2021, 347, 6778. [Google Scholar]
- Yang, W.; Zhao, H.Y.; Shu, H. Simulation and verification of the control strategies for AEB pedestrian collision avoidance system. J. Chongqing Univ. 2019, 422, 1–10. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Collision Scenarios | Vehicle Speed (km/h) | Electric Bicycle Initial Velocity (km/h) | Electric Bicycle Motion Status | Electric Bicycle Acceleration (m/s) | Electric Bicycle Sports Direction |
|---|---|---|---|---|---|
| Scenarios 1 | 40 | 20 | Uniform acceleration | 1.2 | From the outside to the inside of the curve |
| Scenarios 2 | 40 | 20 | Uniform acceleration | 1.2 | From the inside to the outside of the curve |
| Scenarios 3 | 40 | 30 | Uniform deceleration | −1.2 | From the outside to the inside of the curve |
| Scenarios 4 | 40 | 30 | Uniform deceleration | −1.2 | From the inside to the outside of the curve |
| Scenarios 5 | 40 | 25 | Uniform speed | 0 | From the outside to the inside of the curve |
| Scenarios 6 | 40 | 25 | Uniform speed | 0 | From the inside to the outside of the curve |
| Simulation Vehicle | Wheelbase/m | Distance from Centroid to front Axle/m | Distance from Centroid to Rear Axis/m | Centroid Height/m | Quality/kg | Length/m | Width/m | Maximum Braking Pressure/bar |
|---|---|---|---|---|---|---|---|---|
| vehicle | 2.94 | 1.17 | 1.77 | 0.55 | 1820 | 5.2 | 2.0 | 150 |
| electric bicycle | 1.5 | 0.821 | 0.679 | 0.595 | 297 | 2.2 | 0.82 | 80 |
| Collision Avoidance Strategy Parameters | |||
|---|---|---|---|
| 0.2 | 0.02 | 1.6 | 1.0 |
| Symbol | |||
|---|---|---|---|
| Value | 0.7 | 0.3 | 0.01 |
| Collision Scenarios | |||
|---|---|---|---|
| Scenario 1 | 12.5 | 0.4 | 0 |
| Scenario 2 | 12.5 | 0.4 | 0 |
| Scenario 3 | 12 | 0.4 | 0 |
| Scenario 4 | 12 | 0.4 | 0 |
| Scenario 5 | 12.5 | 0.3 | 0 |
| Scenario 6 | 12.5 | 0.3 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, L.; Li, L.; Ge, R. Active Braking Strategy Considering VRU Motion States in Curved Road Conditions. Machines 2023, 11, 100. https://doi.org/10.3390/machines11010100
Hong L, Li L, Ge R. Active Braking Strategy Considering VRU Motion States in Curved Road Conditions. Machines. 2023; 11(1):100. https://doi.org/10.3390/machines11010100
Chicago/Turabian StyleHong, Liang, Liang Li, and Ruhai Ge. 2023. "Active Braking Strategy Considering VRU Motion States in Curved Road Conditions" Machines 11, no. 1: 100. https://doi.org/10.3390/machines11010100
APA StyleHong, L., Li, L., & Ge, R. (2023). Active Braking Strategy Considering VRU Motion States in Curved Road Conditions. Machines, 11(1), 100. https://doi.org/10.3390/machines11010100