
A Novel Sliding Mode Momentum Observer for Collaborative Robot Collision Detection



Abstract
:1. Introduction
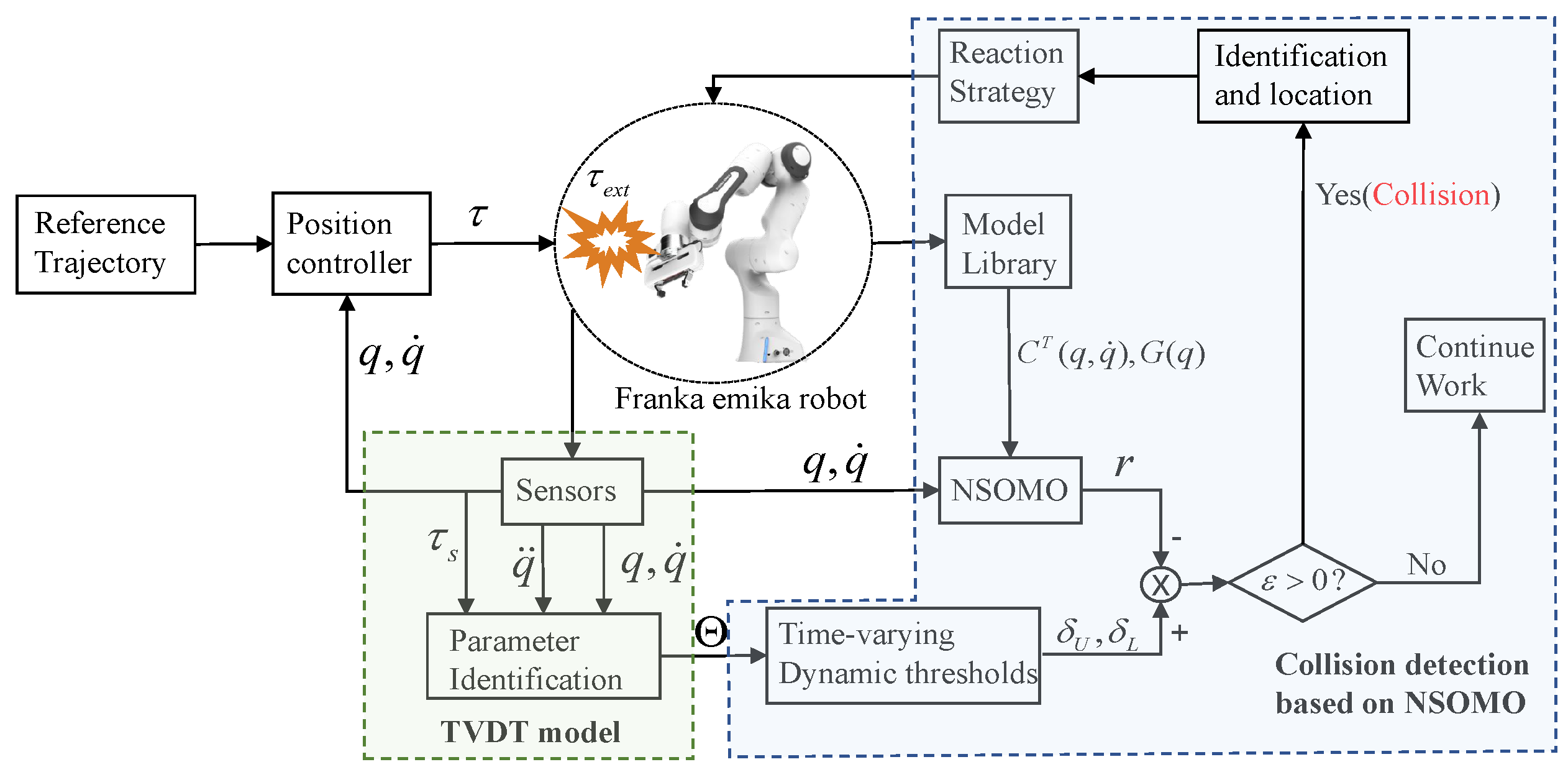
- In order to achieve the required bandwidth and noise immunity for collision detection, a new reaching law (NRL) is designed. The NSOMO is also proposed, exhibiting a slight external torque detection delay, a high external torque estimation accuracy and a small jitter phenomenon. Furthermore, NSOMO can be applied to any robot manipulator, providing a new idea for collision detection technology.
- To further increase detection sensitivity, a TVDT model was constructed by parameter identification of the joint disturbance torque model using offline data. This model can distinguish collision signals from estimated lumped disturbance. It also offers a way to identify collision location based on collision signal.
- Complete stability analysis and reaching time calculation were provided for NRL. For NSOMO, a comprehensive stability proof and a stable region were analyzed. It gives theoretical support for generalizing this approach to other robot systems.
2. Preliminaries
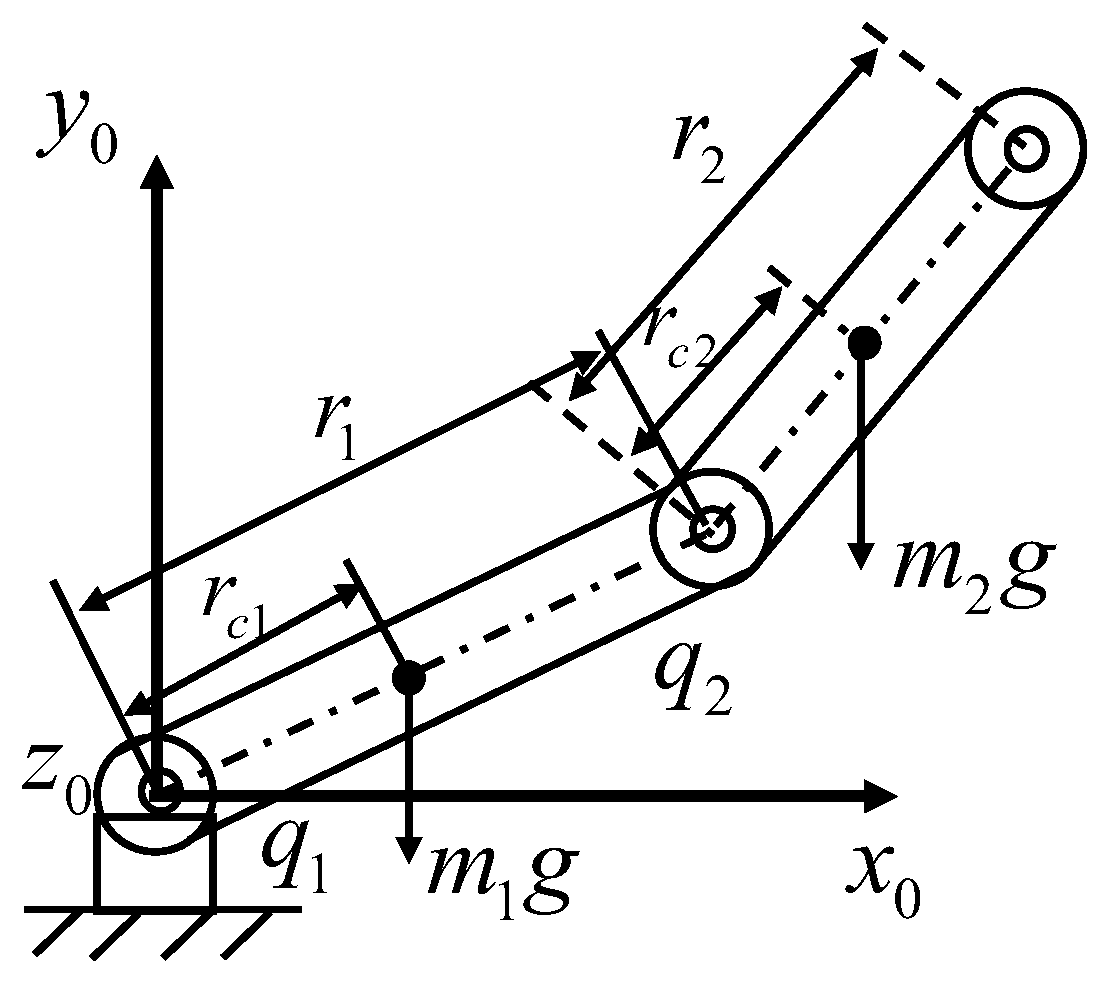
2.1. Model of Robot Dynamics
2.2. Basic Sliding Mode Theory Knowledge
3. Novel Sliding Mode Momentum Observer Design
3.1. Observer Design
3.2. Analysis of the Observer
3.2.1. Existence and Accessibility Proof of NRL
3.2.2. NRL Steady-State Chatter Analysis
3.2.3. NRL Reaching Time Analysis
3.2.4. Analysis of NSOMO Disturbance Stability Bounds
4. Collision Detection Approach
4.1. Time-Varying Dynamic Threshold (TVDT)
4.2. Collision Detection, Identification and Reaction
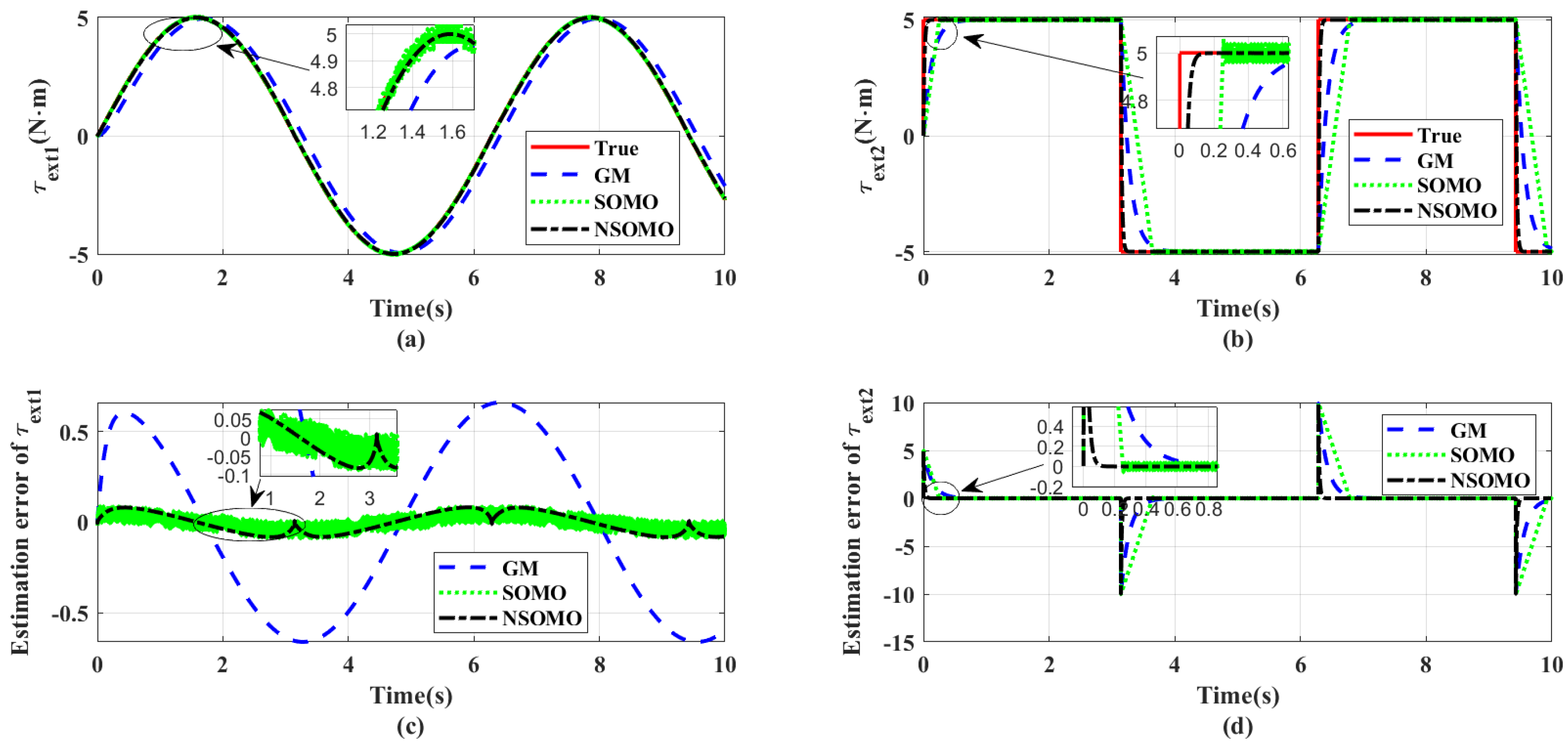
5. Simulation Validation
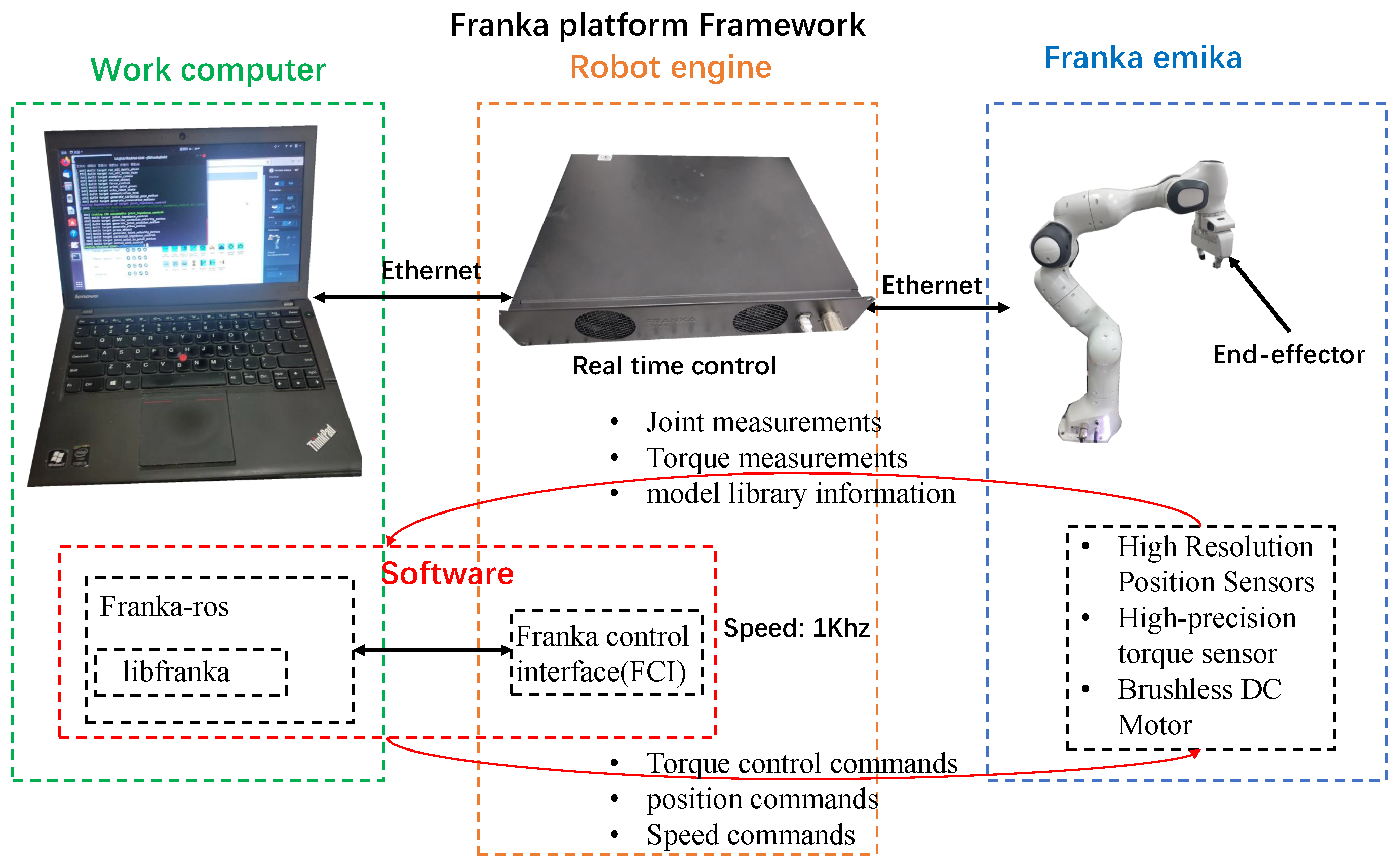
6. Experimental Validation
6.1. Experimental Setup
6.2. Collision Threshold Model Identification Experiment
6.3. External Torque Detection Experiment
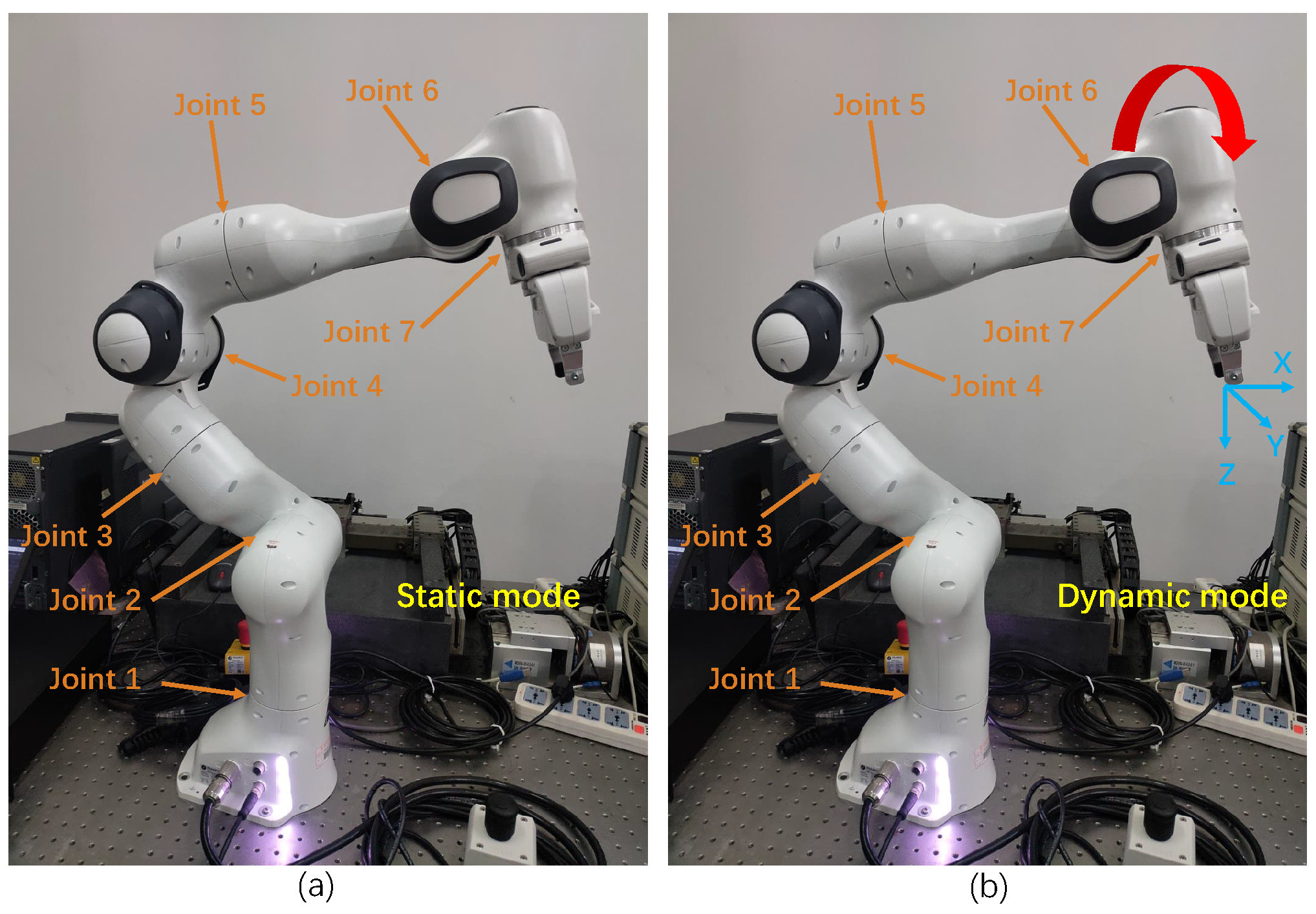
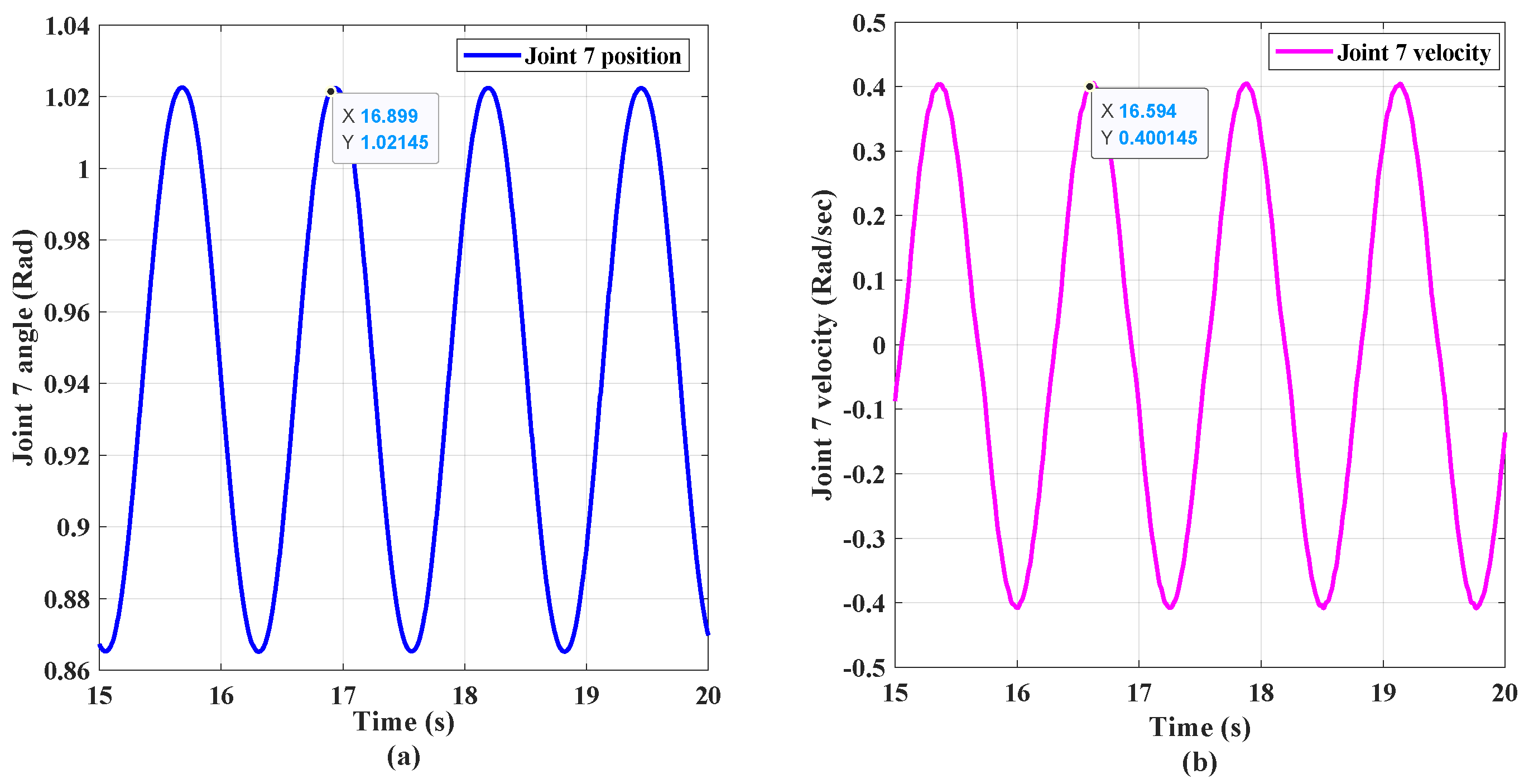
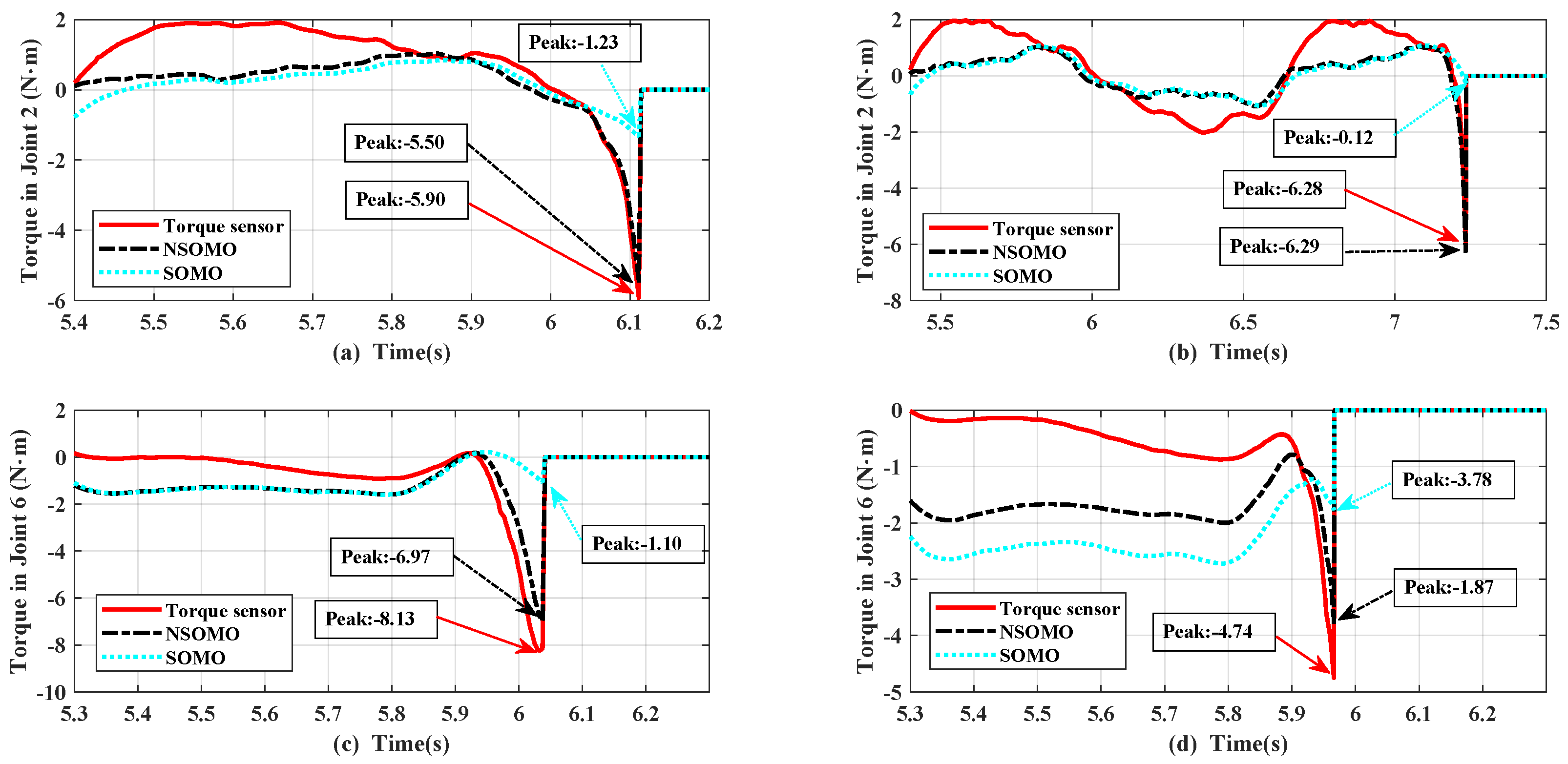
6.3.1. Dynamic External Torque Detection Experiment
6.3.2. Quasi-Static External Torque Detection Experiment
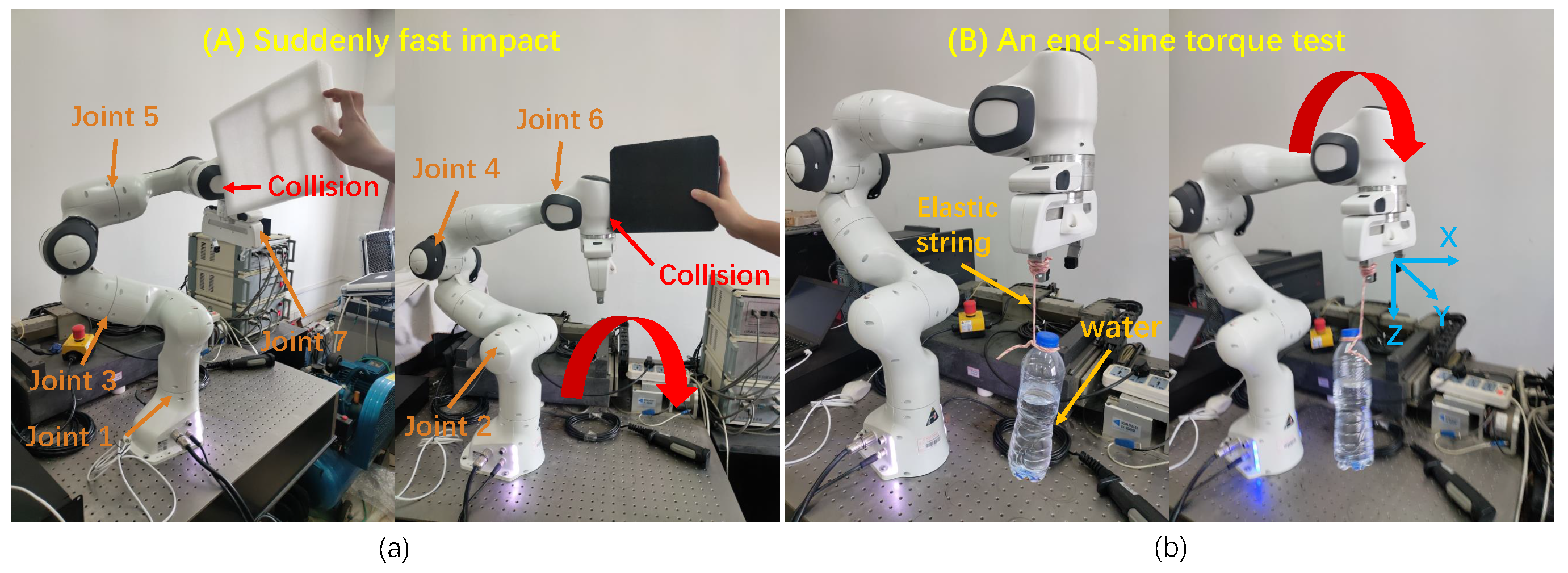
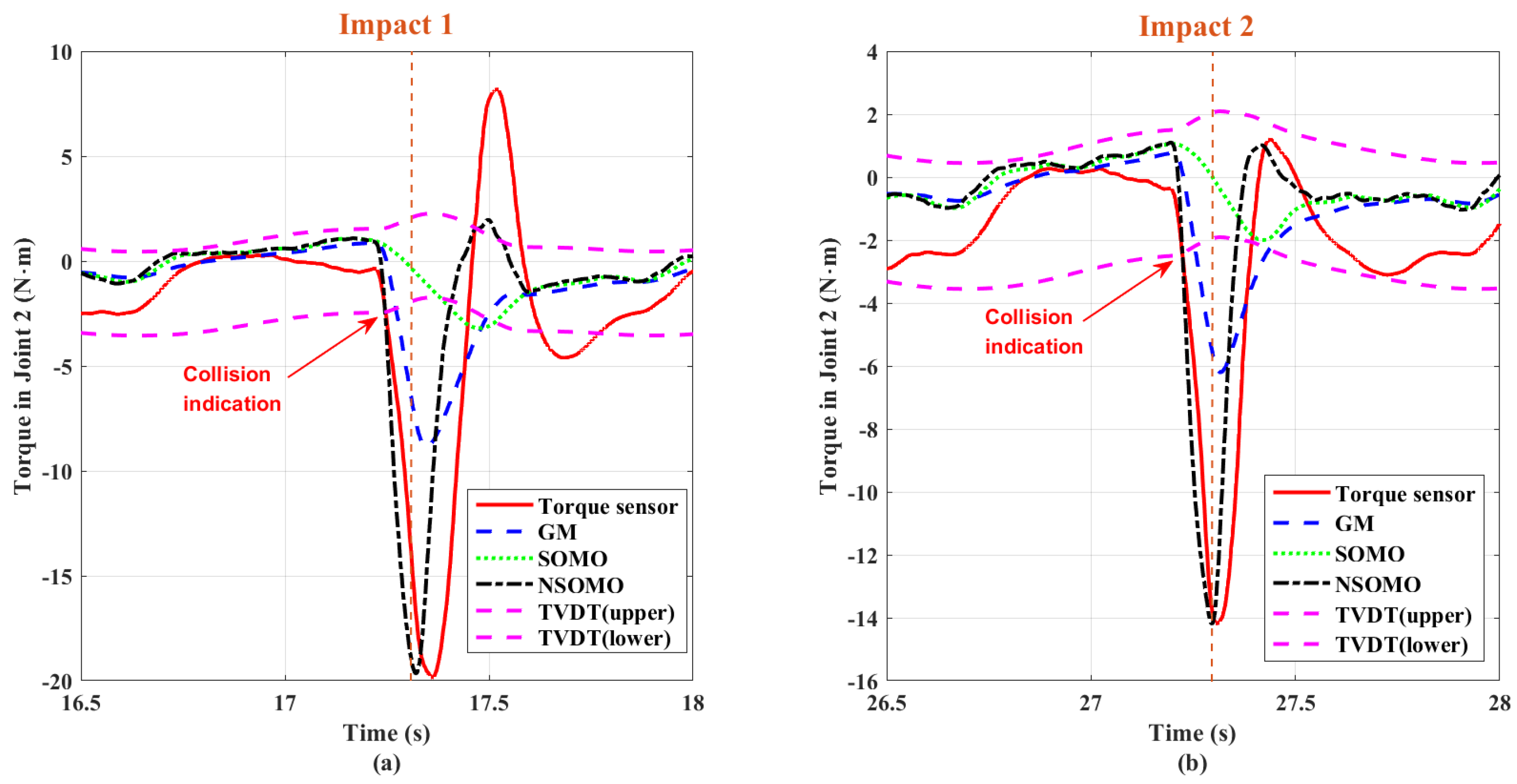
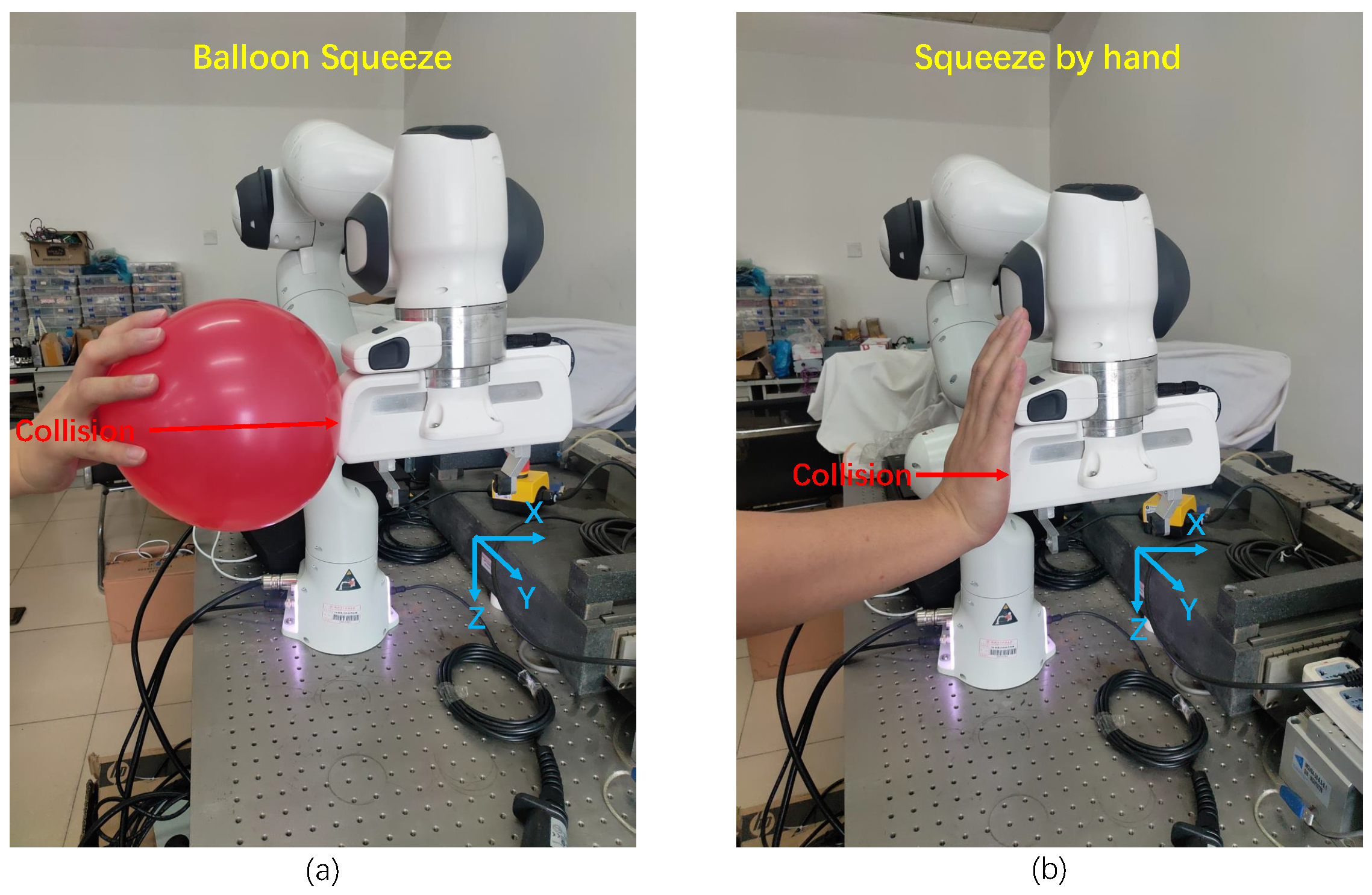
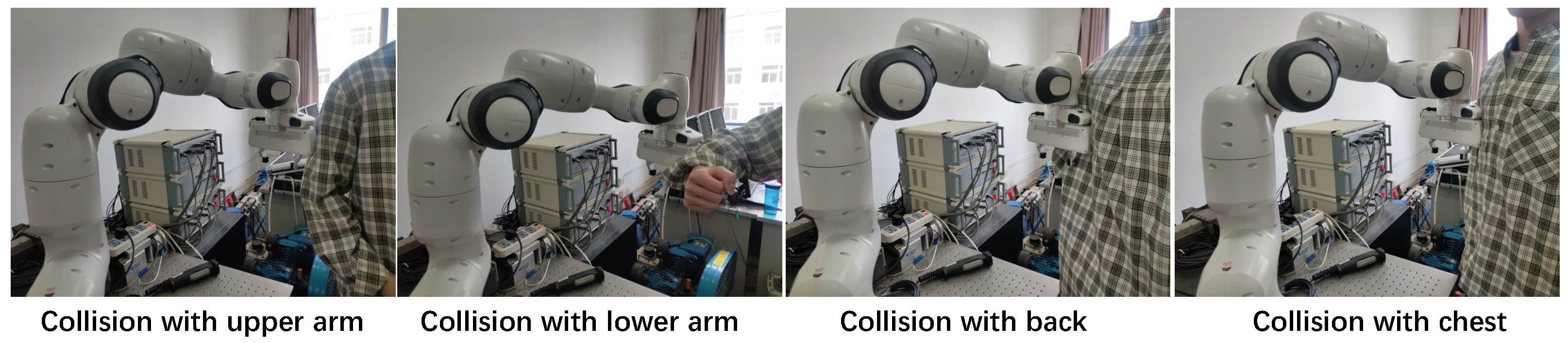
6.4. Human–Robot Interaction Collision Detection Experiment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Requirements for safe robots: Measurements, analysis and new insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Ceriani, N.M.; Rocco, P.; Ding, H.; Matthias, B. Safety in human-robot collaborative manufacturing environments: Metrics and control. IEEE Trans. Autom. Sci. Eng. 2015, 13, 882–893. [Google Scholar] [CrossRef]
- Scimmi, L.S.; Melchiorre, M.; Mauro, S.; Pastorelli, S. Multiple Collision Avoidance between Human Limbs and Robot Links Algorithm in Collaborative Tasks. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Porto, Portugal, 29–31 July 2018; Volume 2, pp. 301–308. [Google Scholar]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human–robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef]
- Yogeswaran, N.; Dang, W.; Navaraj, W.T.; Shakthivel, D.; Khan, S.; Polat, E.O.; Gupta, S.; Heidari, H.; Kaboli, M.; Lorenzelli, L.; et al. New materials and advances in making electronic skin for interactive robots. Adv. Robot. 2015, 29, 1359–1373. [Google Scholar] [CrossRef]
- Birjandi, S.A.B.; Kühn, J.; Haddadin, S. Observer-extended direct method for collision monitoring in robot manipulators using proprioception and imu sensing. IEEE Robot. Autom. Lett. 2020, 5, 954–961. [Google Scholar] [CrossRef]
- Je, H.W.; Baek, J.Y.; Lee, M.C. A study of the collision detection of robot manipulator without torque sensor. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; IEEE: New York, NY, USA, 2009; pp. 4468–4471. [Google Scholar]
- Ohishi, K.; Ohde, H. Collision and force control for robot manipulator without force sensor. In Proceedings of the IECON’94—20th Annual Conference of IEEE Industrial Electronics, Bologna, Italy, 5–9 September 1994; IEEE: New York, NY, USA, 1994; Volume 2, pp. 766–771. [Google Scholar]
- Cao, P.; Gan, Y.; Dai, X. Finite-time disturbance observer for robotic manipulators. Sensors 2019, 19, 1943. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- Ren, T.; Dong, Y.; Wu, D.; Chen, K. Collision detection and identification for robot manipulators based on extended state observer. Control Eng. Pract. 2018, 79, 144–153. [Google Scholar] [CrossRef]
- Moe, S.; Rustad, A.M.; Hanssen, K.G. Machine learning in control systems: An overview of the state of the art. In Proceedings of the International Conference on Innovative Techniques and Applications of Artificial Intelligence, Cambridge, UK, 11–13 December 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 250–265. [Google Scholar]
- Yu, W.; Wu, M.; Huang, B.; Lu, C. A generalized probabilistic monitoring model with both random and sequential data. Automatica 2022, 144, 110468. [Google Scholar] [CrossRef]
- Zhao, C. Perspectives on nonstationary process monitoring in the era of industrial artificial intelligence. J. Process Control 2022, 116, 255–272. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges, and perspectives. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1700–1716. [Google Scholar] [CrossRef]
- Chen, H.; Li, L.; Shang, C.; Huang, B. Fault detection for nonlinear dynamic systems with consideration of modeling errors: A data-driven approach. IEEE Trans. Cybern. 2022. [Google Scholar] [CrossRef] [PubMed]
- Sharkawy, A.N.; Koustoumpardis, P.N.; Aspragathos, N.A. Manipulator collision detection and collided link identification based on neural networks. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Patras, Greece, 6–8 June 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 3–12. [Google Scholar]
- Park, K.M.; Kim, J.; Park, J.; Park, F.C. Learning-based real-time detection of robot collisions without joint torque sensors. IEEE Robot. Autom. Lett. 2020, 6, 103–110. [Google Scholar] [CrossRef]
- Chen, C.; Huang, J.; Wu, D.; Tu, X. Interval Type-2 Fuzzy Disturbance Observer Based TS Fuzzy Control for a Pneumatic Flexible Joint. IEEE Trans. Ind. Electron. 2021, 69, 5962–5972. [Google Scholar] [CrossRef]
- Ito, H.; Yamamoto, K.; Mori, H.; Ogata, T. Efficient multitask learning with an embodied predictive model for door opening and entry with whole-body control. Sci. Robot. 2022, 7, eaax8177. [Google Scholar] [CrossRef]
- De Luca, A.; Albu-Schaffer, A.; Haddadin, S.; Hirzinger, G. Collision detection and safe reaction with the DLR-III lightweight manipulator arm. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE: New York, NY, USA, 2006; pp. 1623–1630. [Google Scholar]
- Haddadin, S. Towards Safe Robots: Approaching Asimov’s 1st Law; Springer: Berlin/Heidelberg, Germany, 2013; Volume 90. [Google Scholar]
- Oh, Y.; Chung, W.K. Disturbance-observer-based motion control of redundant manipulators using inertially decoupled dynamics. IEEE/ASME Trans. Mechatron. 1999, 4, 133–146. [Google Scholar]
- De Luca, A.; Schroder, D.; Thummel, M. An acceleration-based state observer for robot manipulators with elastic joints. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; IEEE: New York, NY, USA, 2007; pp. 3817–3823. [Google Scholar]
- De Luca, A.; Mattone, R. Actuator failure detection and isolation using generalized momenta. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; IEEE: New York, NY, USA, 2003; Volume 1, pp. 634–639. [Google Scholar]
- Briquet-Kerestedjian, N.; Makarov, M.; Grossard, M.; Rodriguez-Ayerbe, P. Generalized momentum based-observer for robot impact detection—Insights and guidelines under characterized uncertainties. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Mauna Lani Resort, HI, USA, 27–30 August 2017; IEEE: New York, NY, USA, 2017; pp. 1282–1287. [Google Scholar]
- Haddadin, S.; Albu-Schaffer, A.; De Luca, A.; Hirzinger, G. Collision detection and reaction: A contribution to safe physical human-robot interaction. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: New York, NY, USA, 2008; pp. 3356–3363. [Google Scholar]
- Zhang, X.; Zhao, J.; Zhang, M.; Liu, X. Disturbance Recognition and Collision Detection of Manipulator Based on Momentum Observer. Sensors 2020, 20, 4187. [Google Scholar] [CrossRef]
- Wu, H.; Li, S.; Wu, G. Collision detection algorithm for robot manipulator based on momentum deviation observer. Electr. Mach. Control 2015, 19, 97–104. [Google Scholar]
- Cao, P.; Gan, Y.; Dai, X. Model-based sensorless robot collision detection under model uncertainties with a fast dynamics identification. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419853713. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Zhu, M.; Xu, Z.; Mu, D. A nonlinear momentum observer for sensorless robot collision detection under model uncertainties. Mechatronics 2021, 78, 102603. [Google Scholar] [CrossRef]
- Guo, M.; Zhang, H.; Feng, C.; Liu, M.; Huo, J. Manipulator residual estimation and its application in collision detection. Ind. Robot. Int. J. 2018, 45, 354–362. [Google Scholar] [CrossRef]
- Birjandi, S.A.B.; Haddadin, S. Model-adaptive high-speed collision detection for serial-chain robot manipulators. IEEE Robot. Autom. Lett. 2020, 5, 6544–6551. [Google Scholar] [CrossRef]
- Heo, Y.J.; Kim, D.; Lee, W.; Kim, H.; Park, J.; Chung, W.K. Collision detection for industrial collaborative robots: A deep learning approach. IEEE Robot. Autom. Lett. 2019, 4, 740–746. [Google Scholar] [CrossRef]
- Wahrburg, A.; Morara, E.; Cesari, G.; Matthias, B.; Ding, H. Cartesian contact force estimation for robotic manipulators using Kalman filters and the generalized momentum. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; IEEE: New York, NY, USA, 2015; pp. 1230–1235. [Google Scholar]
- Han, L.; Mao, J.; Cao, P.; Gan, Y.; Li, S. Towards sensorless interaction force estimation for industrial robots using high-order finite-time observers. IEEE Trans. Ind. Electron. 2021, 69, 7275–7284. [Google Scholar] [CrossRef]
- Garofalo, G.; Mansfeld, N.; Jankowski, J.; Ott, C. Sliding mode momentum observers for estimation of external torques and joint acceleration. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: New York, NY, USA, 2019; pp. 6117–6123. [Google Scholar]
- Brahmi, B.; Laraki, M.H.; Brahmi, A.; Saad, M.; Rahman, M.H. Improvement of sliding mode controller by using a new adaptive reaching law: Theory and experiment. ISA Trans. 2020, 97, 261–268. [Google Scholar] [CrossRef]
- Haddadin, S.; Parusel, S.; Johannsmeier, L.; Golz, S.; Gabl, S.; Walch, F.; Sabaghian, M.; Jaehne, C.; Hausperger, L.; Haddadin, S. The Franka Emika Robot: A Reference Platform for Robotics Research and Education. IEEE Robot. Autom. Mag. 2022, 29, 46–64. [Google Scholar] [CrossRef]
- Jung, B.j.; Choi, H.R.; Koo, J.C.; Moon, H. Collision detection using band designed disturbance observer. In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Korea, 20–24 August 2012; IEEE: New York, NY, USA, 2012; pp. 1080–1085. [Google Scholar]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-Mode Robot Control with Exponential Reaching Law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Haddadin, S.; De Luca, A.; Albu-Schäffer, A. Robot collisions: A survey on detection, isolation, and identification. IEEE Trans. Robot. 2017, 33, 1292–1312. [Google Scholar] [CrossRef]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef]
- Li, P.; Ma, J.J.; Zheng, Z.Q. Sliding mode control approach based on nonlinear integrator. Control Theory Appl. 2011, 28, 619–624. [Google Scholar]
- Rohith, G. Fractional power rate reaching law for augmented sliding mode performance. J. Frankl. Inst. 2021, 358, 856–876. [Google Scholar] [CrossRef]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Moulay, E.; Perruquetti, W. Finite time stability conditions for non-autonomous continuous systems. Int. J. Control 2008, 81, 797–803. [Google Scholar] [CrossRef]
- Brahmi, B.; Bojairami, I.E.; Saad, M.; Driscoll, M.; Zemam, S.; Laraki, M.H. Enhancement of sliding mode control performance for perturbed and unperturbed nonlinear systems: Theory and experimentation on rehabilitation robot. J. Electr. Eng. Technol. 2021, 16, 599–616. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Tan, J.; Zhou, Z.; Zhu, X.; Zhang, Y. Attitude control for flying wing unmanned aerial vehicles based on fractional order integral sliding-mode. Control Theory Appl. 2015. [Google Scholar] [CrossRef]
- Li, W.; Han, Y.; Wu, J.; Xiong, Z. Collision detection of robots based on a force/torque sensor at the bedplate. IEEE/ASME Trans. Mechatron. 2020, 25, 2565–2573. [Google Scholar] [CrossRef]
- Sotoudehnejad, V.; Kermani, M.R. Velocity-based variable thresholds for improving collision detection in manipulators. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: New York, NY, USA, 2014; pp. 3364–3369. [Google Scholar]
- Sotoudehnejad, V.; Takhmar, A.; Kermani, M.R.; Polushin, I.G. Counteracting modeling errors for sensitive observer-based manipulator collision detection. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; IEEE: New York, NY, USA, 2012; pp. 4315–4320. [Google Scholar]
- Eberman, B.S. Whole-Arm Manipulation: Kinematics and Control. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1989. [Google Scholar]
- Rosenstrauch, M.J.; Krüger, J. Safe human-robot-collaboration-introduction and experiment using ISO/TS 15066. In Proceedings of the 2017 3rd International conference on control, automation and robotics (ICCAR), Nagoya, Japan, 22–24 April 2017; IEEE: New York, NY, USA, 2017; pp. 740–744. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Parameters |
|---|---|
| GM | |
| SOMO | |
| NSOMO |
| Approach | J1 | J2 | J1 Delay | J1 Raising Time | J2 Regulation Time |
|---|---|---|---|---|---|
| GM | 8.49 Nm | 8.67 Nm | 0.15 s | 1.5 s | 0.70 s |
| SOMO | 0.60 Nm | 16.01 Nm | 0.01 s | 1.33 s | 0.24 s |
| NSOMO | 1.05 Nm | 1.06 Nm | 0.02 s | 1.35 s | 0.10 s |
| Approach | Suddenly Fast Impact | End-Sine Torque Test | Balloon Squeeze | Squeeze by Hand | ||||
|---|---|---|---|---|---|---|---|---|
| Joint 2 | Joint 2 | Joint 3 | Joint 3 | |||||
| Delay (s) | RMS (N·m) | Delay (s) | RMS (N·m) | Delay (s) | RMS (N·m) | Delay (s) | RMS (N·m) | |
| GM | 0.10 | 3.858 | 0.22 | .680 | 0.98 | 0.295 | 0.35 | 0.677 |
| SOMO | 0.03 | 5.501 | 0.18 | 0.177 | 0.52 | 0.257 | 0.28 | 0.570 |
| NSOMO | 0.01 | 3.537 | 0.14 | 0.167 | 0.51 | 0.245 | 0.20 | 0.554 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, S.; Dang, X.; Sun, S.; Wang, Y.; Gui, M. A Novel Sliding Mode Momentum Observer for Collaborative Robot Collision Detection. Machines 2022, 10, 818. https://doi.org/10.3390/machines10090818
Long S, Dang X, Sun S, Wang Y, Gui M. A Novel Sliding Mode Momentum Observer for Collaborative Robot Collision Detection. Machines. 2022; 10(9):818. https://doi.org/10.3390/machines10090818
Chicago/Turabian StyleLong, Shike, Xuanju Dang, Shanlin Sun, Yongjun Wang, and Mingzhen Gui. 2022. "A Novel Sliding Mode Momentum Observer for Collaborative Robot Collision Detection" Machines 10, no. 9: 818. https://doi.org/10.3390/machines10090818
APA StyleLong, S., Dang, X., Sun, S., Wang, Y., & Gui, M. (2022). A Novel Sliding Mode Momentum Observer for Collaborative Robot Collision Detection. Machines, 10(9), 818. https://doi.org/10.3390/machines10090818