
Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System




Abstract
:1. Introduction
1.1. General Framework
1.2. Background
1.3. Aim of This Work
2. Modelling and Design of the Robotic Fish
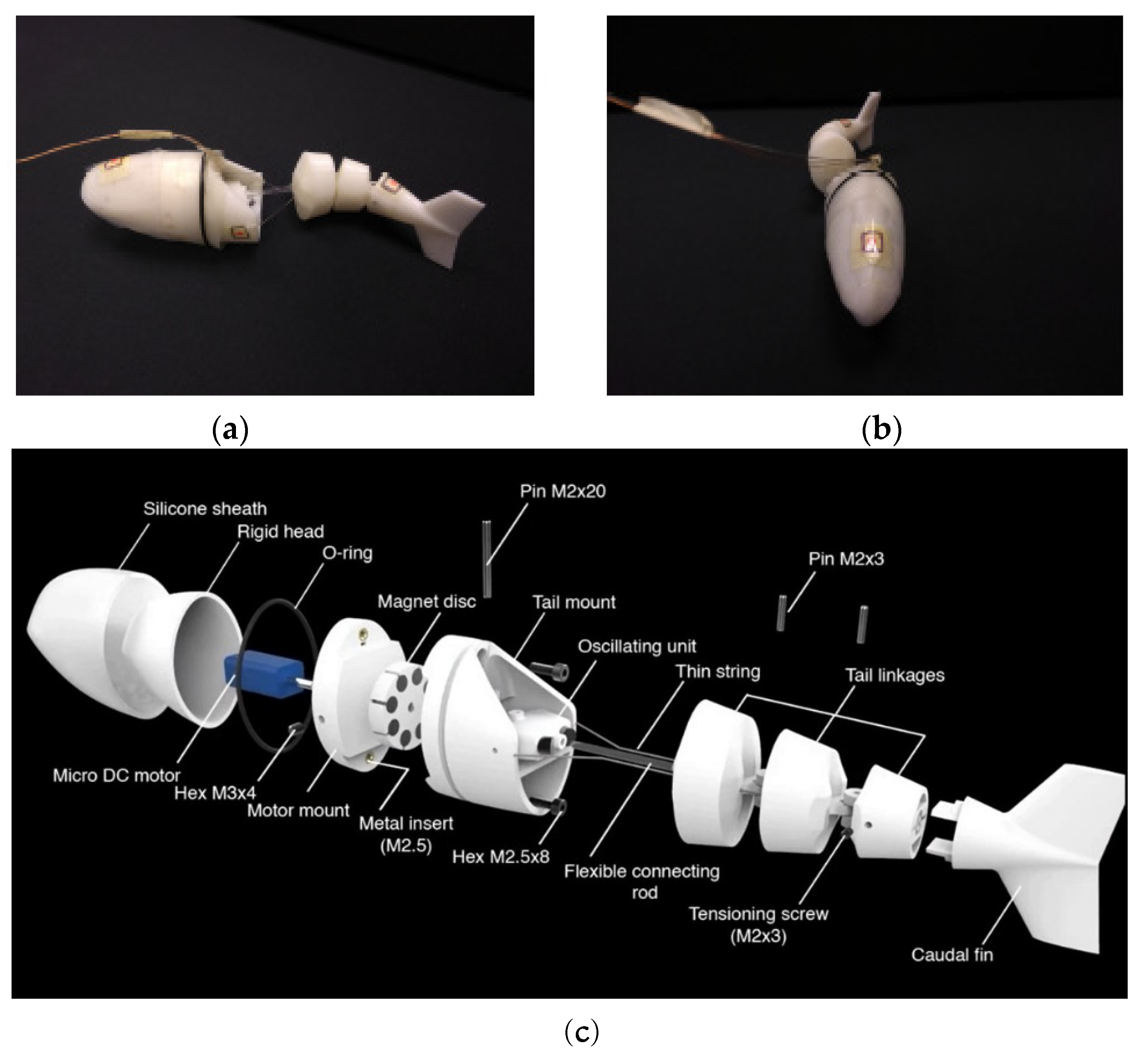
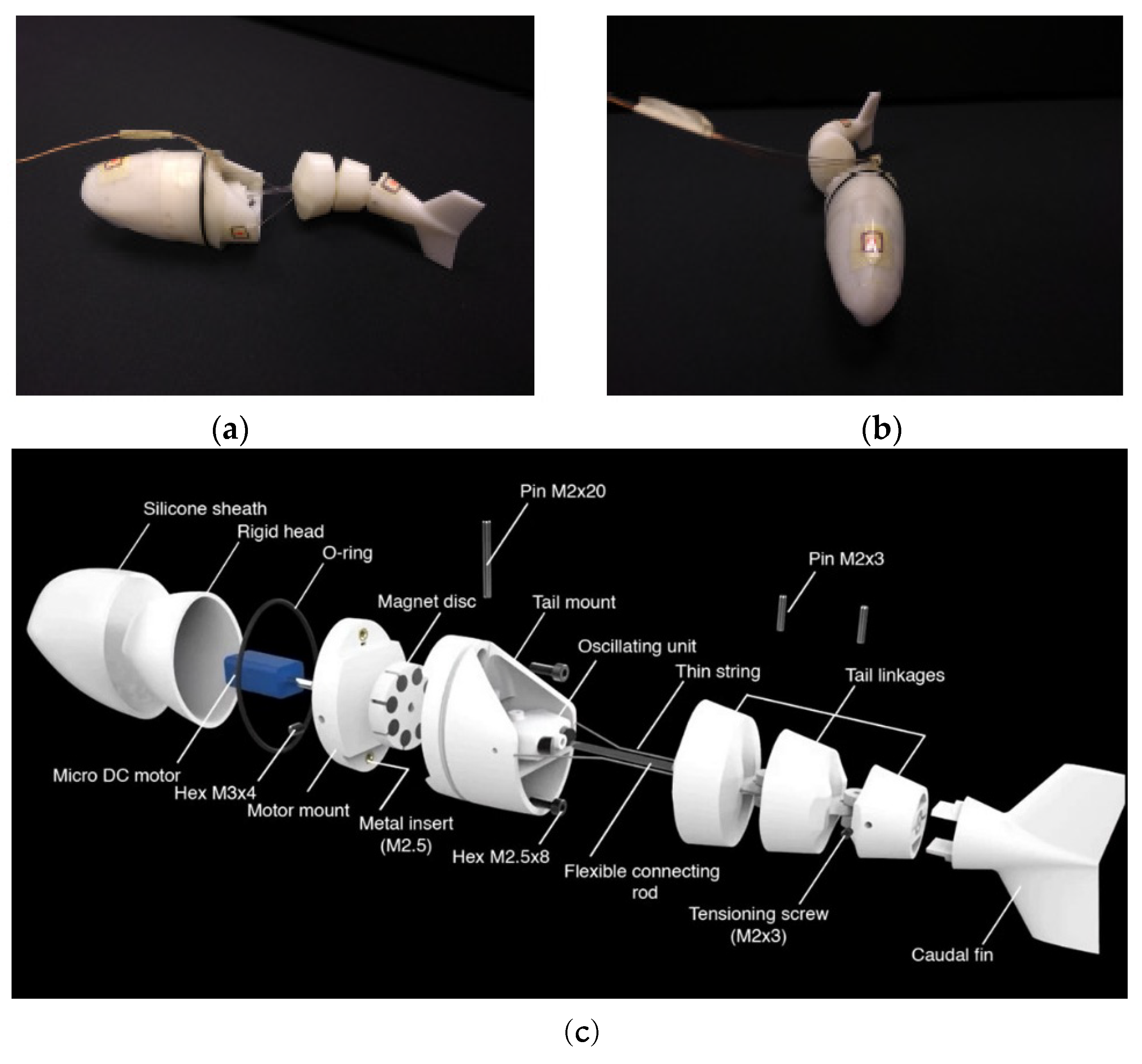
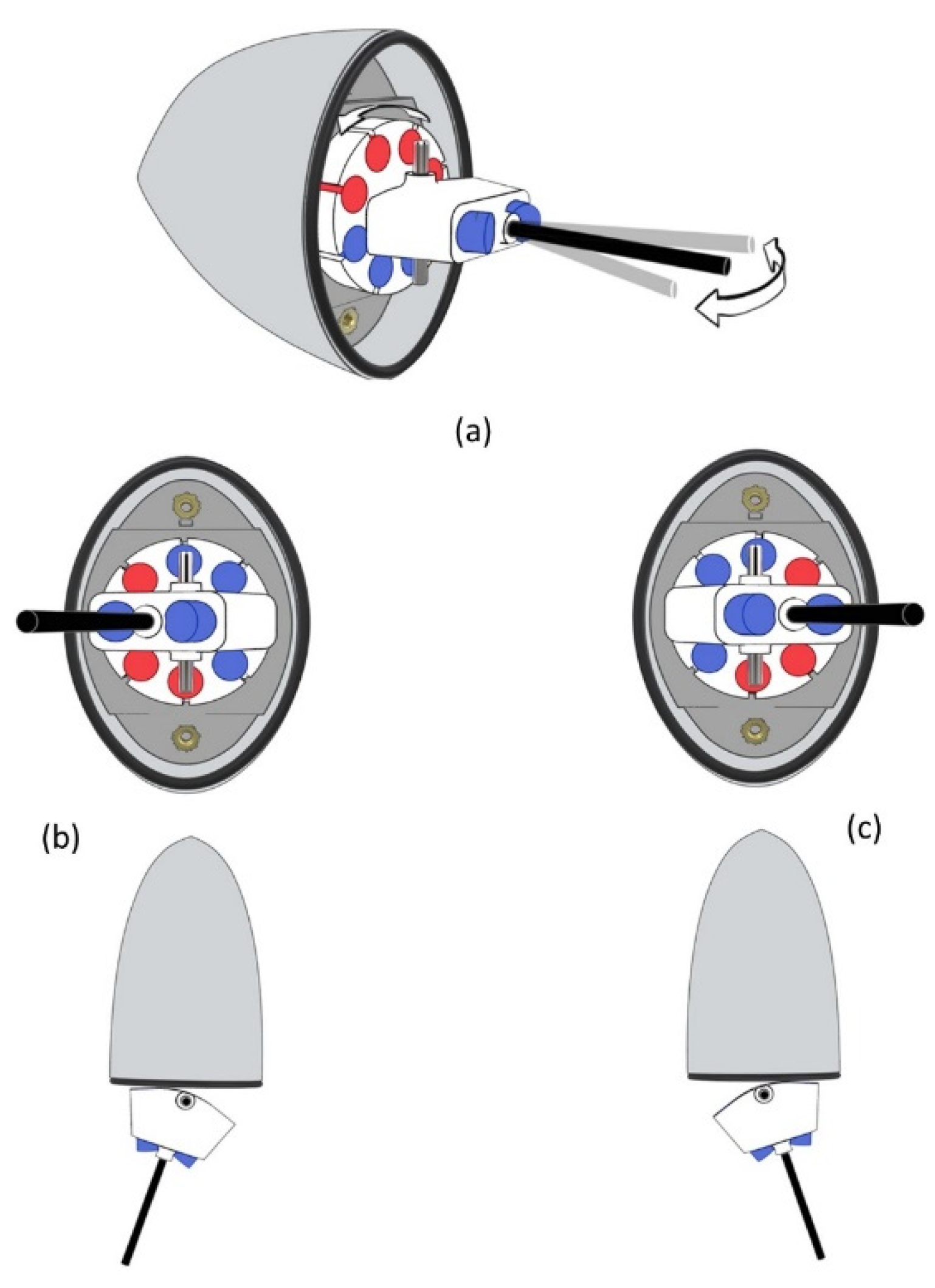
2.1. Overview of the Complete Prototype and Working Principle
- Hydrodynamic waterproof head.
- Three links, the last of which with a built-in caudal fin.
- Power supply wires.
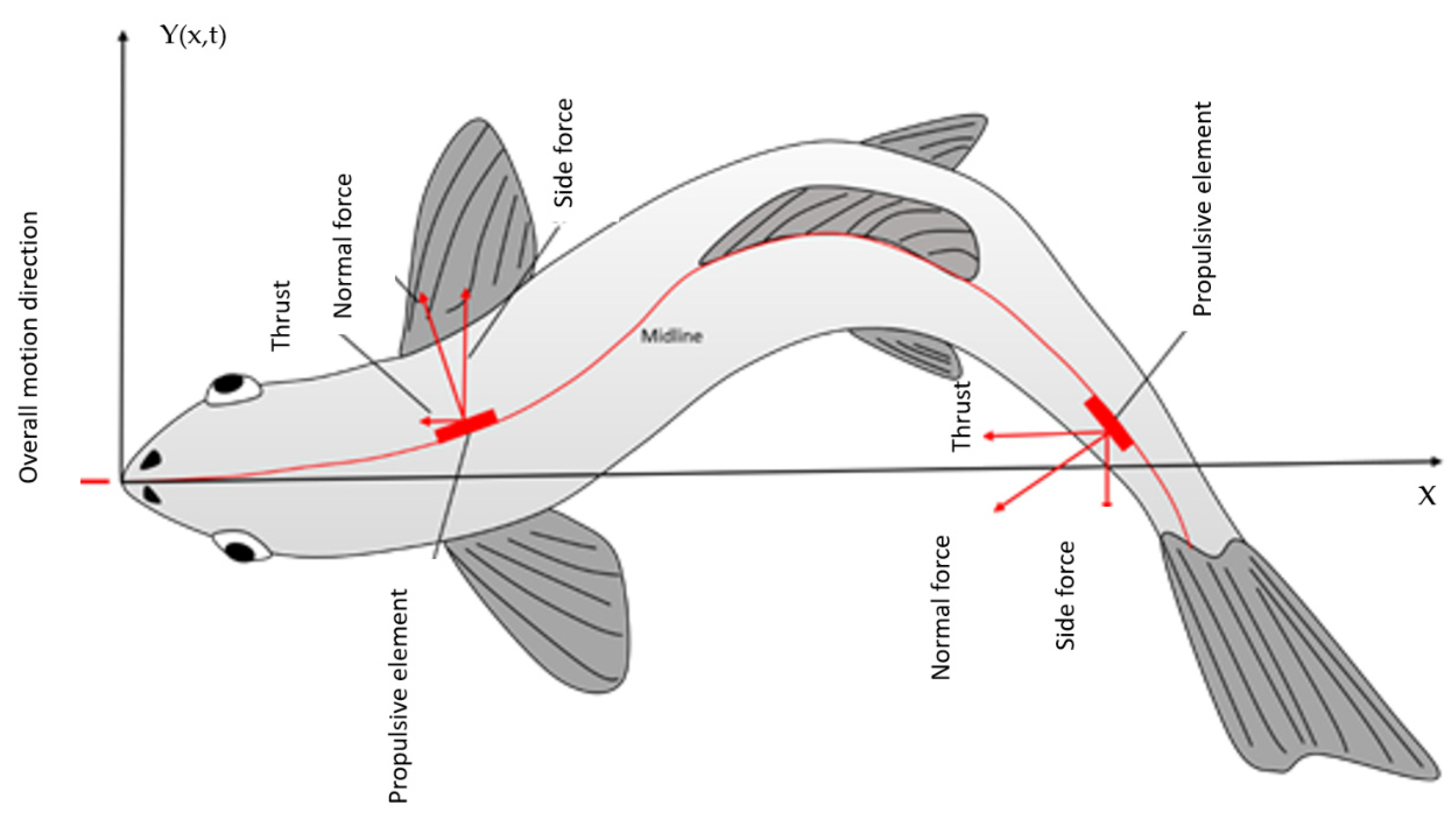
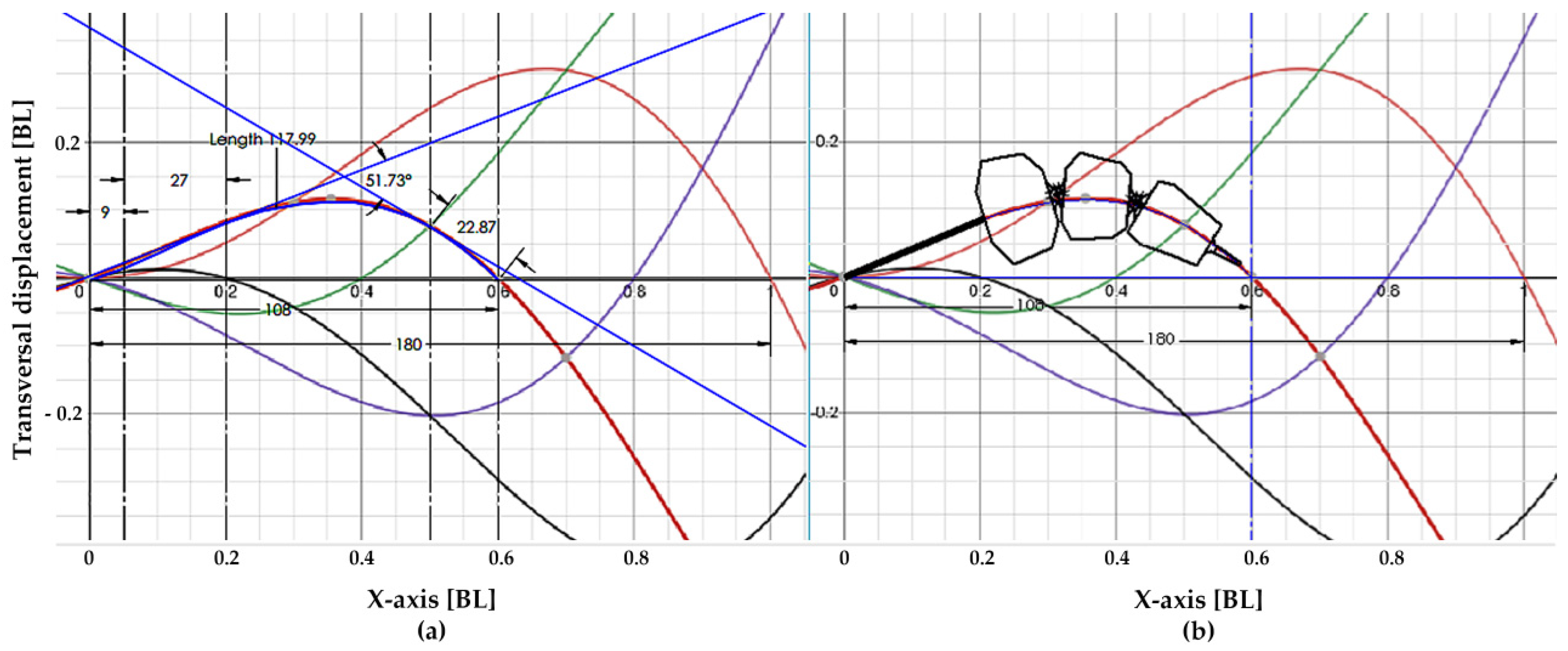
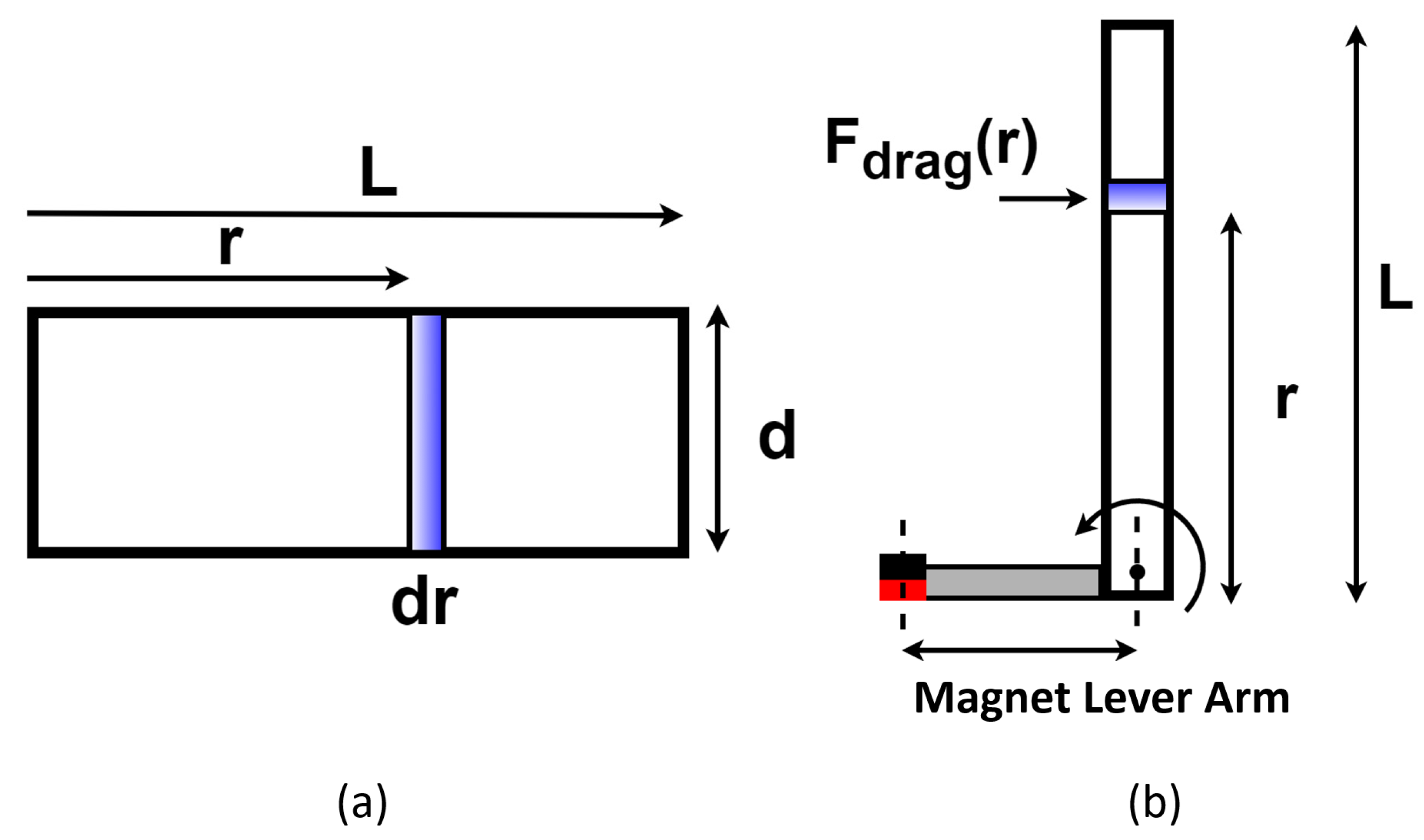
2.2. Modelling of the Travelling Wave
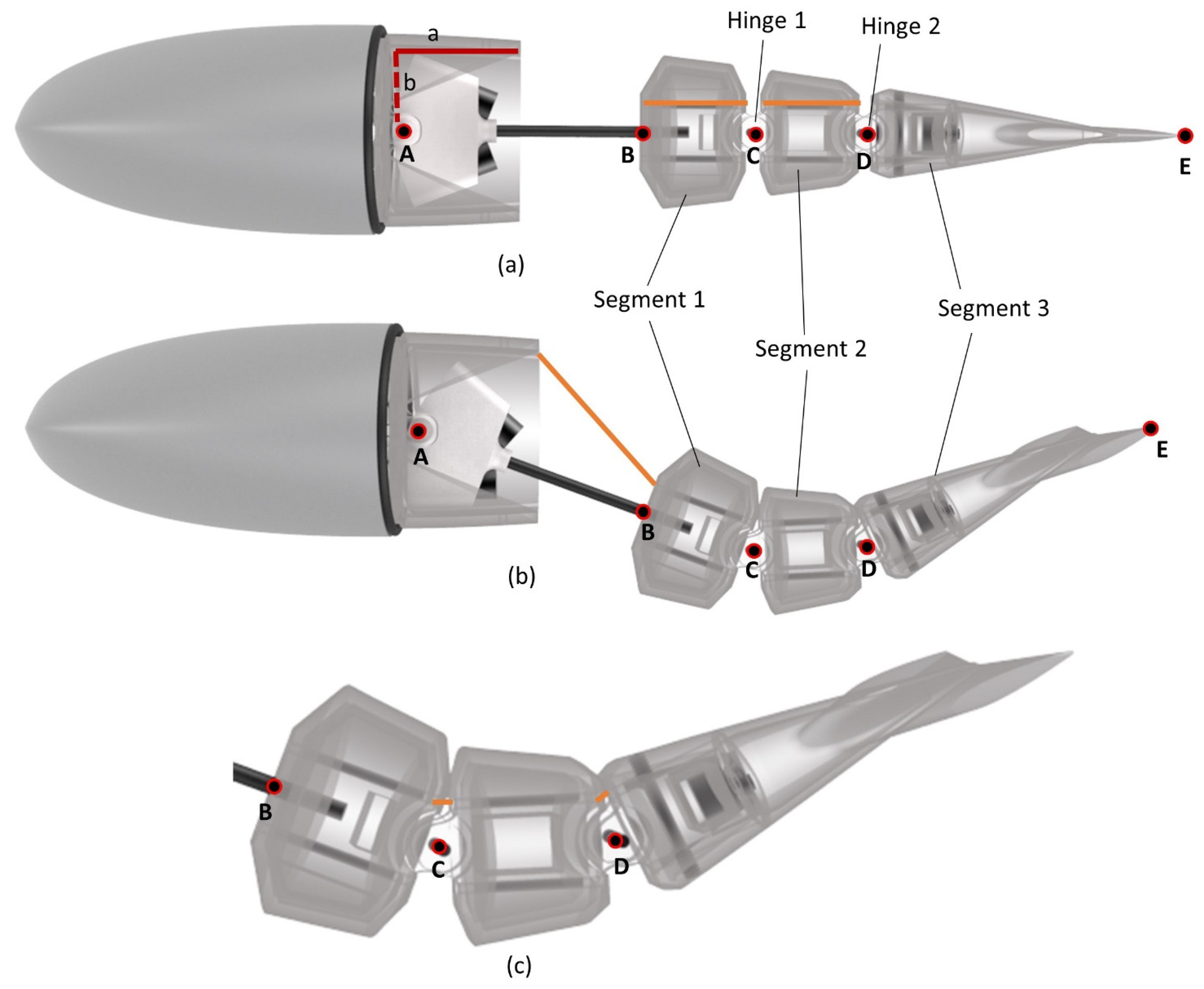
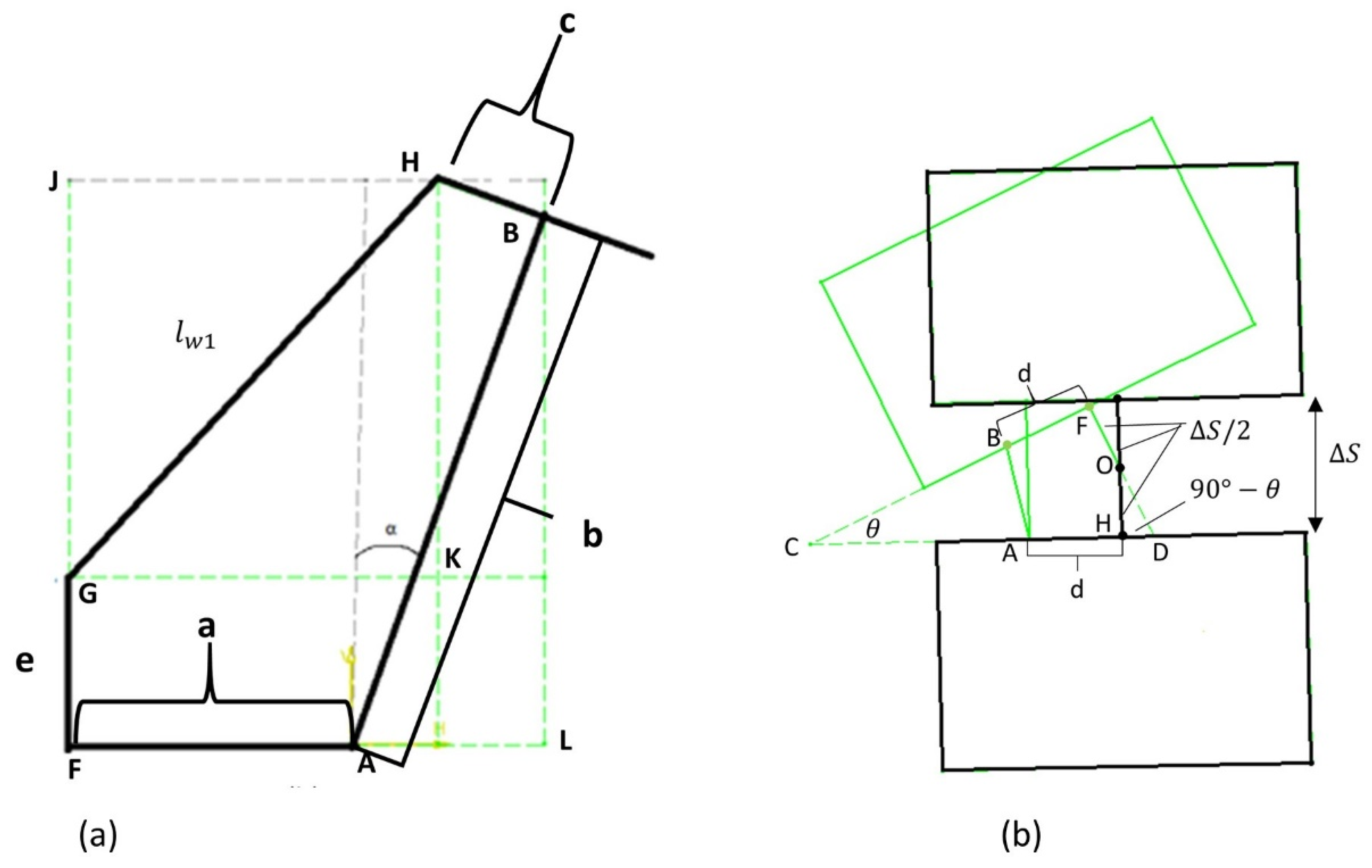
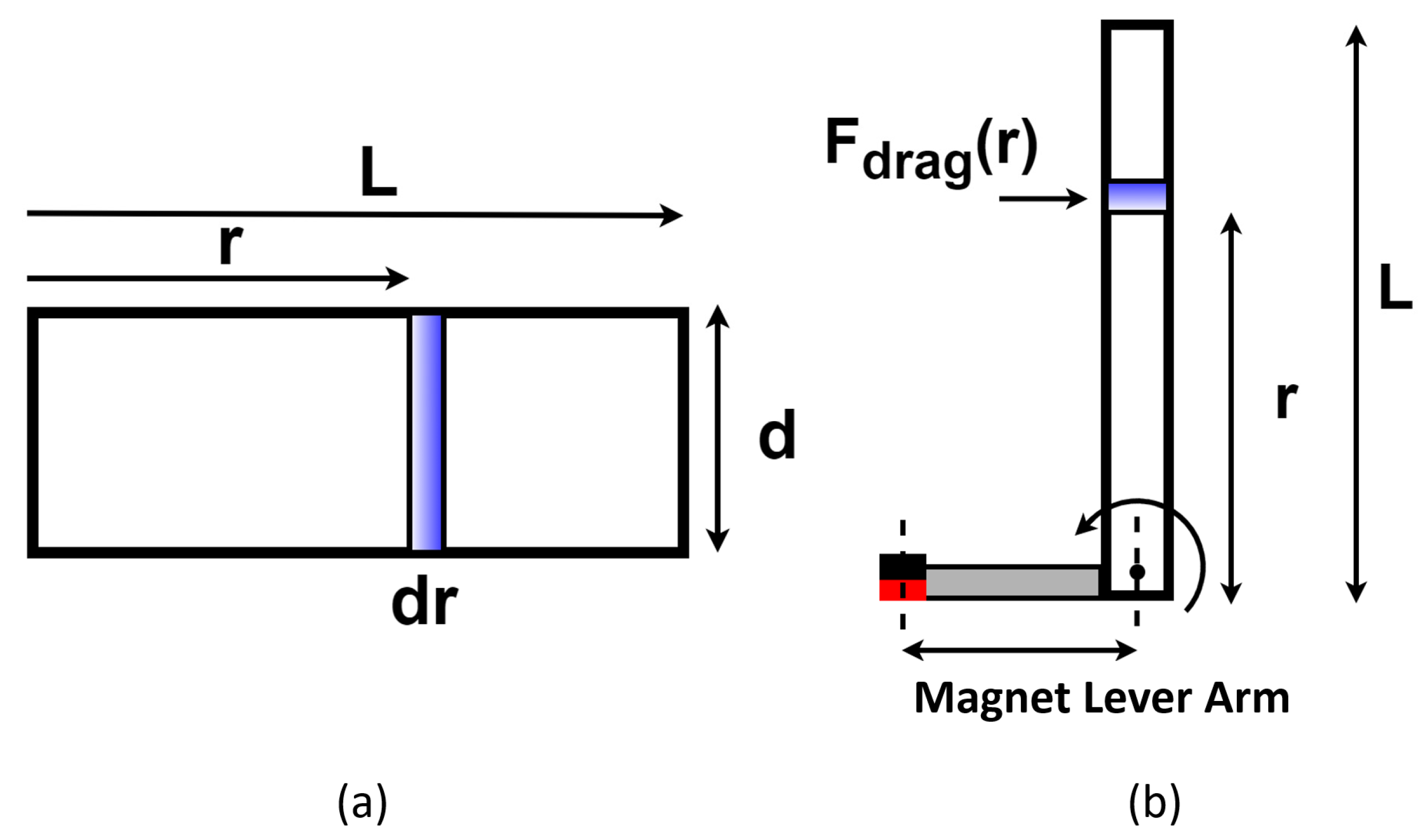
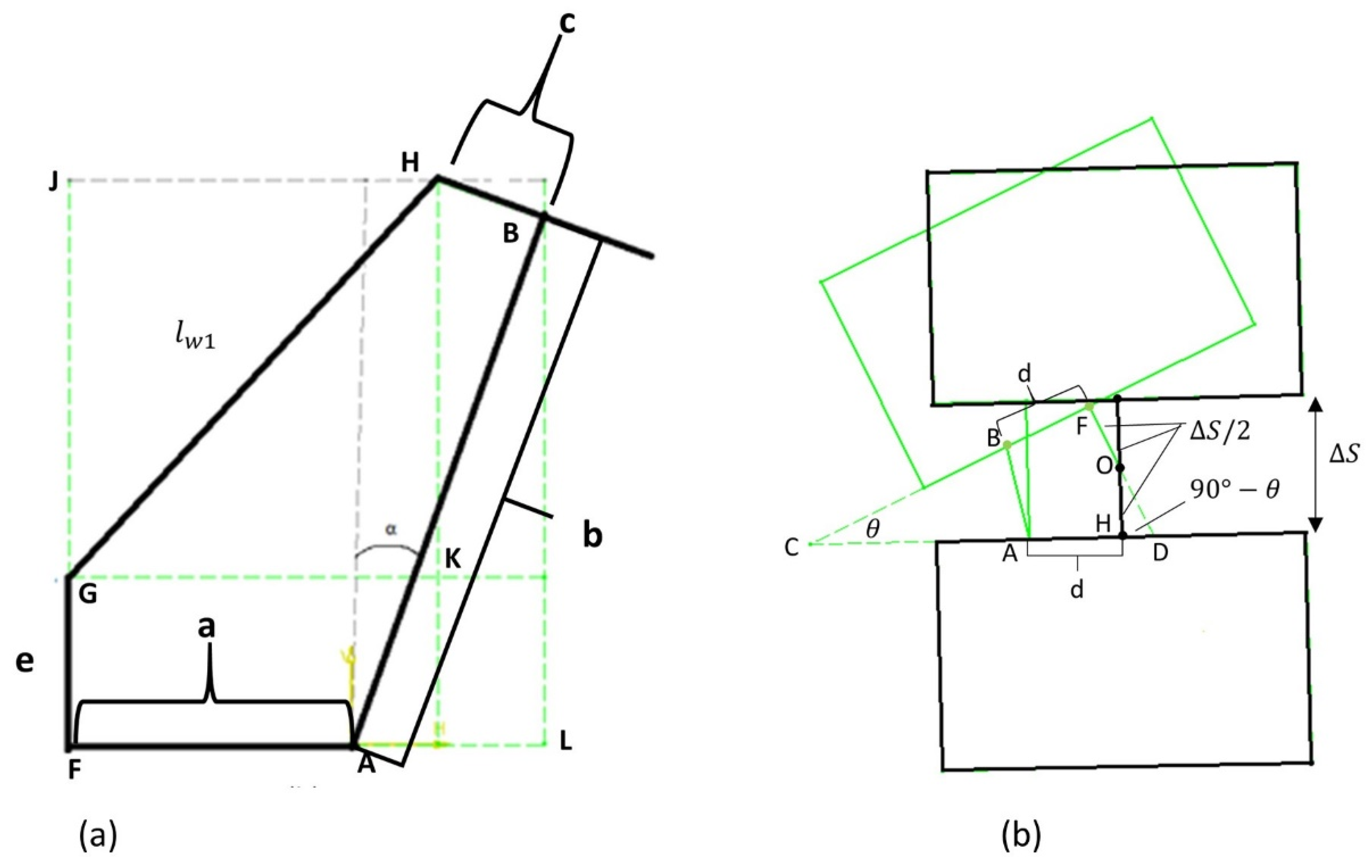
2.3. Wire Mechanism Calculation
2.4. Final Robot Design
2.4.1. Magnet Selection
2.4.2. Motor Selection
2.4.3. 3D Model and Manufacture of the Robotic Fish
2.4.4. Vertical Stability of the Robotic Fish
3. Experimental Tests
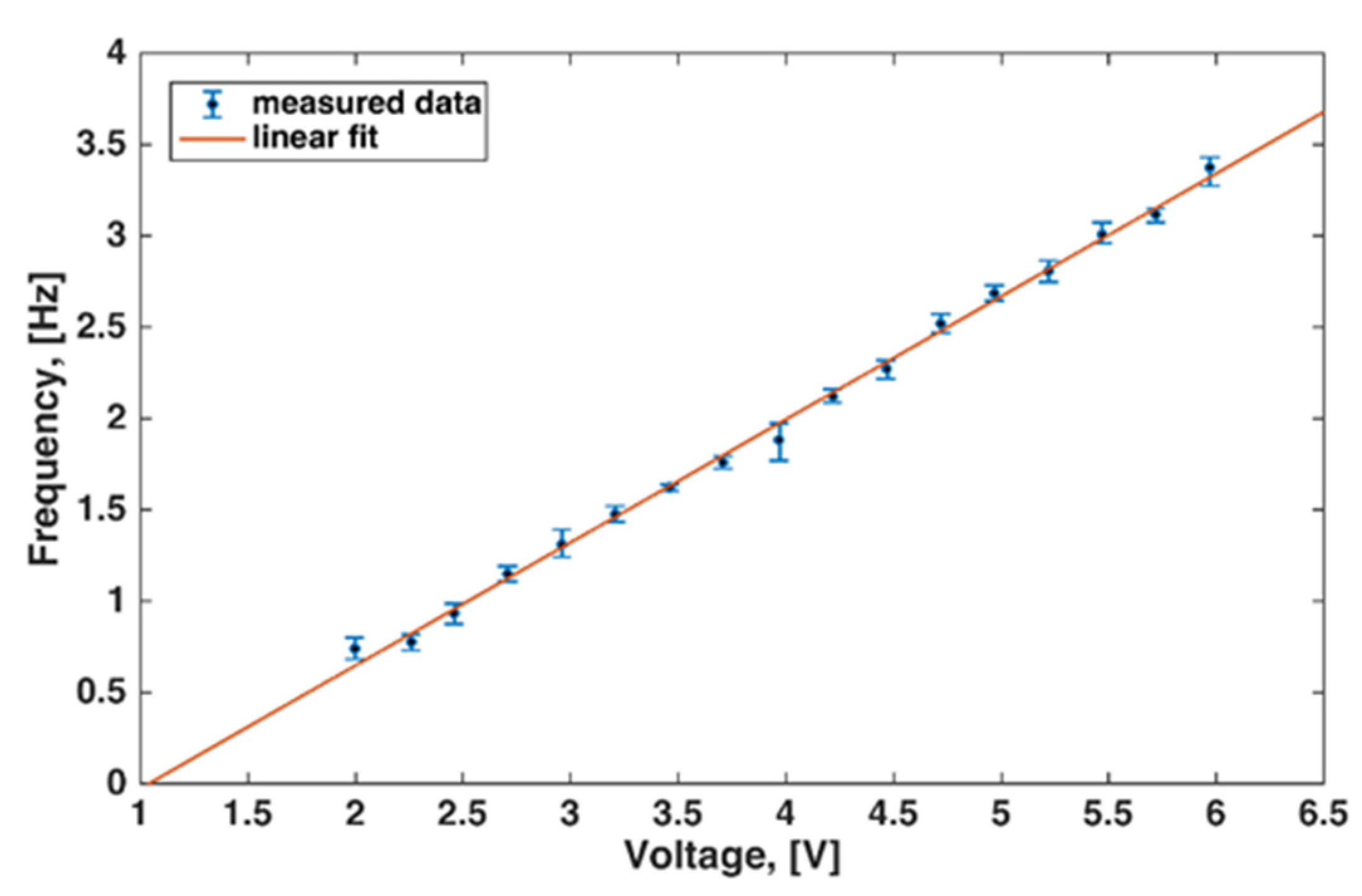
- Motor voltage-to-tail beat frequency mapping.
- Electrical power consumption at different tail beat frequencies.
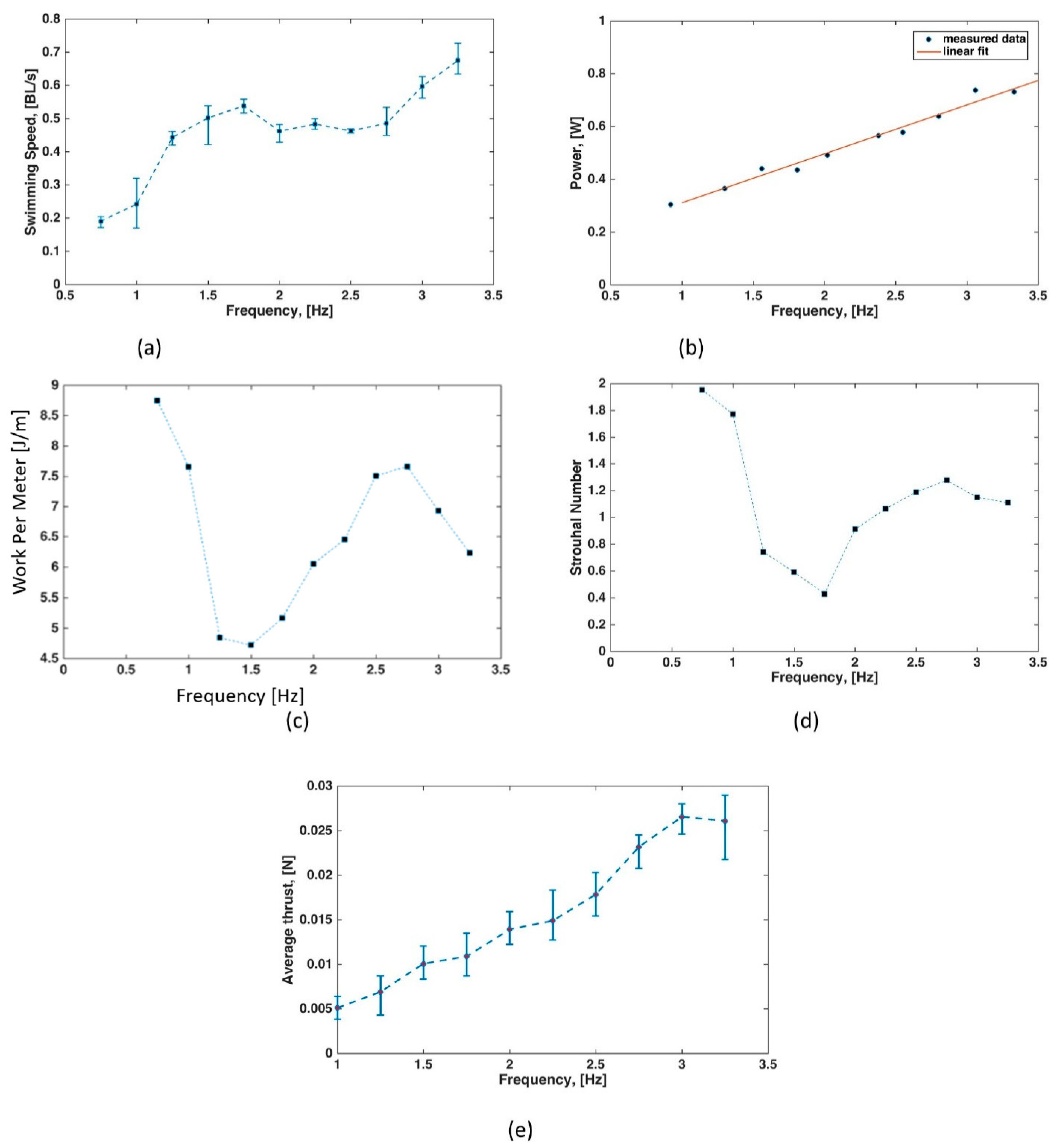
- Average swimming speed at different tail beat frequencies.
- Average thrust generated at different tail beat frequencies.
- Cost of transport at different tail beat frequencies.
- Strouhal number, which denotes the efficiency of swimming, at different tail beat frequencies.
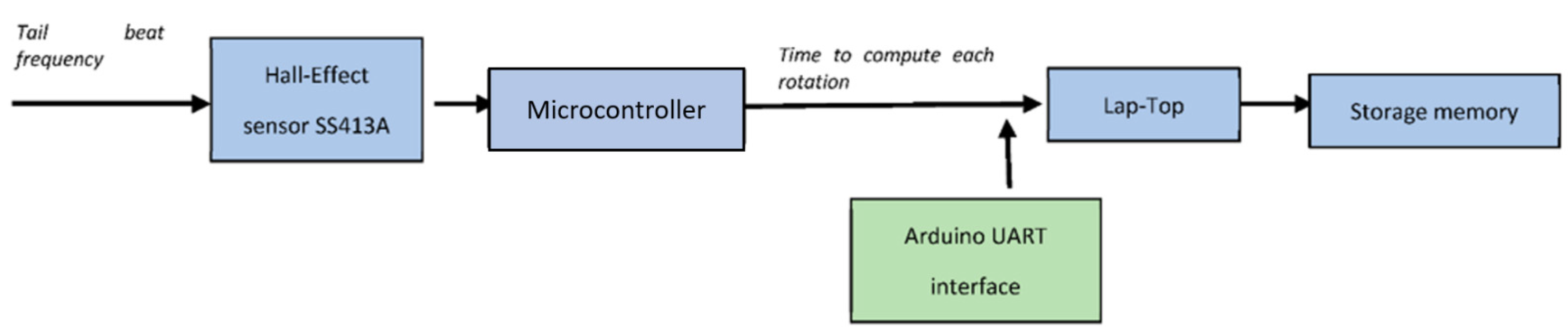
3.1. Setup I
3.2. Setup II—Average Swimming Speed at Different Tail Beat Frequencies, Power Consumption, and Cost of Transport
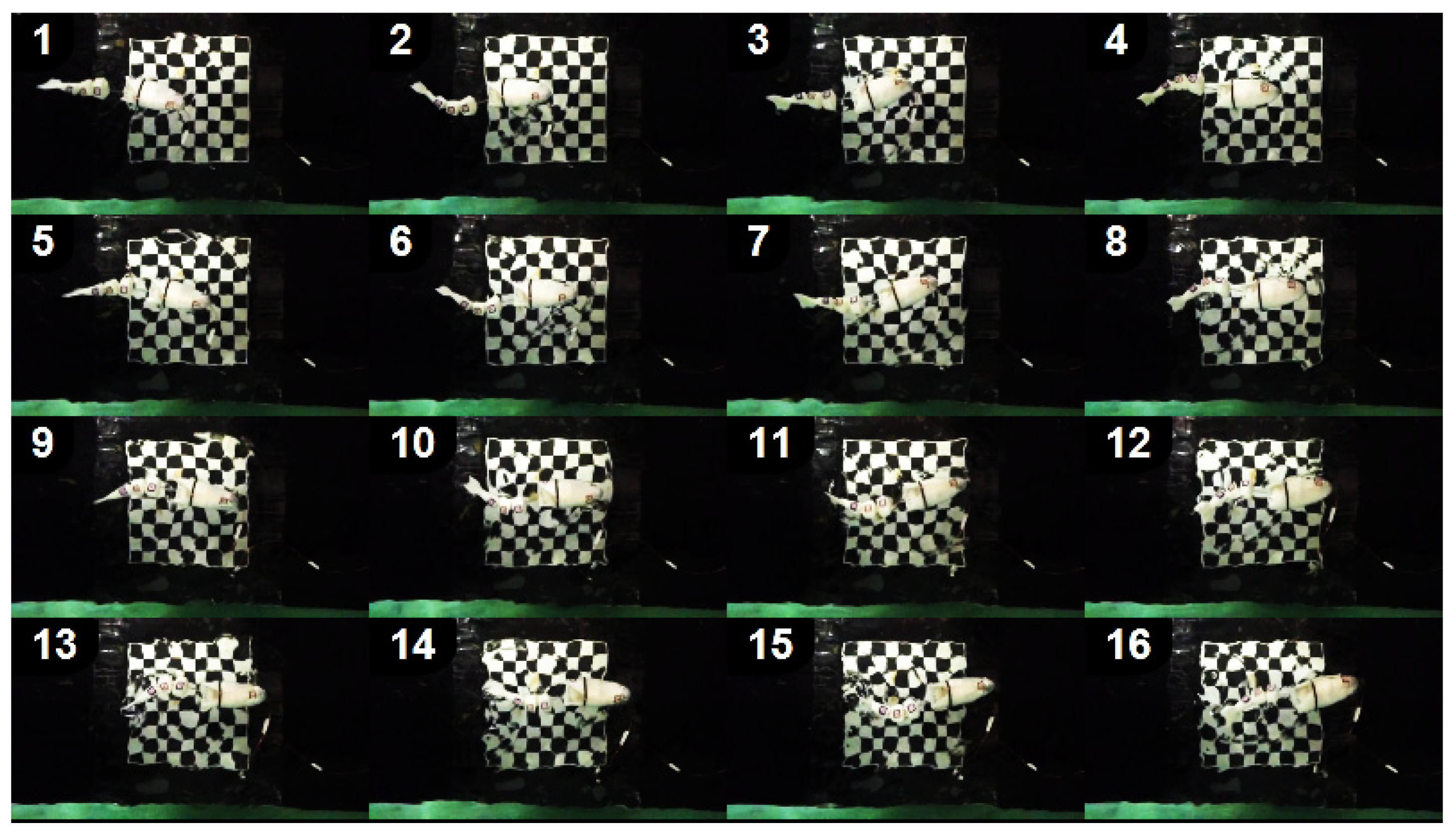
3.2.1. Swimming Speed Calculation
3.2.2. Power Consumption
3.2.3. Work per Meter and Cost of Transport
3.2.4. Strouhal Number
3.3. Setup III
4. Conclusions and Future Directions
- Modular design.
- Simple control.
- Light weight and small size with neutral buoyancy.
- Easy to manufacture.
- Noise due to magnet snapping (however, lower than that of propellers traditionally used in underwater vehicles).
- Absence of active buoyancy control.
- Very high frequencies are bracketed by the choice of gear motor.
- Power externally provided by means of wires.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of science robotics. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef] [PubMed]
- Morimoto, Y.; Onoe, H.; Takeuchi, S. Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues. Sci. Robot. 2018, 3, eaat4440. [Google Scholar] [CrossRef] [PubMed]
- Romano, D.; Donati, E.; Benelli, G.; Stefanini, C. A review on animal–robot interaction: From bio-hybrid organisms to mixed societies. Biol. Cybern. 2019, 113, 201–225. [Google Scholar] [CrossRef] [PubMed]
- Romano, D.; Benelli, G.; Donati, E.; Remorini, D.; Canale, A.; Stefanini, C. Multiple cues produced by a robotic fish modulate aggressive behaviour in Siamese fighting fishes. Sci. Rep. 2017, 7, 4667. [Google Scholar] [CrossRef]
- Kopman, V.; Laut, J.; Polverino, G.; Porfiri, M. Closed-loop control of zebrafish response using a bioinspired robotic-fish in a preference test. J. R. Soc. Interface 2013, 10, 20120540. [Google Scholar] [CrossRef]
- Phillips, A. Robot Fish: Bio-inspired Fishlike Underwater Robots. Underw. Technol. 2017, 34, 143–145. [Google Scholar] [CrossRef]
- Romano, D.; Benelli, G.; Hwang, J.S.; Stefanini, C. Fighting fish love robots: Mate discrimination in males of a highly territorial fish by using female-mimicking robotic cues. Hydrobiologia 2019, 833, 185–196. [Google Scholar] [CrossRef]
- Worm, M.; Landgraf, T.; von der Emde, G. Electric signal synchronization as a behavioural strategy to generate social attention in small groups of mormyrid weakly electric fish and a mobile fish robot. Biol. Cybern. 2021, 115, 599–613. [Google Scholar] [CrossRef]
- Brown, A.A.; Brown, M.F.; Folk, S.R.; Utter, B.A. Archerfish respond to a hunting robotic conspecific. Biol. Cybern. 2021, 115, 585–598. [Google Scholar] [CrossRef]
- Bierbach, D.; Mönck, H.J.; Lukas, J.; Habedank, M.; Romanczuk, P.; Landgraf, T.; Krause, J. Guppies Prefer to Follow Large (Robot) Leaders Irrespective of Own Size. Front. Bioeng. Biotechnol. 2020, 8, 441. [Google Scholar] [CrossRef]
- Porfiri, M.; Yang, Y.; Lemay, B.; El Khoury, R.; Clément, R.J.G.; Ghirlanda, S. Can robotic fish help zebrafish learn to open doors? Proc. SPIE 2019, 10965, 109650B. [Google Scholar]
- Raj, A.; Thakur, A. Fish-inspired robots: Design, sensing, actuation, and autonomy-A review of research. Bioinspiration Biomim. 2016, 11, 031001. [Google Scholar] [CrossRef] [PubMed]
- White, C.; Lauder, G.V.; Bart-Smith, H. Tunabot Flex: A tuna-inspired robot with body flexibility improves high-performance swimming. Bioinspiration Biomim. 2021, 16, 026019. [Google Scholar] [CrossRef] [PubMed]
- Kim, E.J.; Youm, Y. Design and dynamic analysis of fish robot: PoTuna. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 6 April–1 May 2004. [Google Scholar]
- Masoomi, S.F.; Gutschmidt, S.; Chen, X.; Sellier, M. The kinematics and dynamics of undulatory motion of a tuna-mimetic robot. Int. J. Adv. Robot. Syst. 2015, 12, 83. [Google Scholar] [CrossRef]
- Zhu, J.; White, C.; Wainwright, D.K.; Di Santo, V.; Lauder, G.V.; Bart-Smith, H. Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes. Sci. Robot. 2019, 4, 34. [Google Scholar] [CrossRef]
- Wang, J.; Tran, H.; Christino, M.; White, C.; Zhu, J.; Lauder, G.; Bart-Smith, H.; Dong, H. Hydrodynamics and flow characterization of tuna-inspired propulsion in forward swimming. In Proceedings of the ASME-JSME-KSME 2019 8th Joint Fluids Engineering Conference, San Francisco, CA, USA, 28 July–1 August 2019. [Google Scholar]
- Zhong, Y.; Li, Z.; Du, R. A Novel Robot Fish with Wire-Driven Active Body and Compliant Tail. IEEE/ASME Trans. Mechatron. 2017, 22, 1633–1643. [Google Scholar] [CrossRef]
- Zhong, Y.; Song, J.; Yu, H.; Du, R. Toward a Transform Method from Lighthill Fish Swimming Model to Biomimetic Robot Fish. IEEE Robot. Autom Lett. 2018, 3, 2632–2639. [Google Scholar] [CrossRef]
- Chen, J.; Yin, B.; Wang, C.; Xie, F.; Du, R.; Zhong, Y. Bioinspired Closed-loop CPG-based Control of a Robot Fish for Obstacle Avoidance and Direction Tracking. J. Bionic. Eng. 2021, 18, 171–183. [Google Scholar] [CrossRef]
- Low, K.H.; Chong, C.W.; Zhou, C. Performance study of a fish robot propelled by a flexible caudal fin. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Liu, J.; Dukes, I.; Hu, H. Novel mechatronics design for a robotic fish. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Chen, W.; Xia, D.; Liu, J. Modular design and realization of a torpedo-shape robot fish. In Proceedings of the 2008 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 5–8 August 2008. [Google Scholar]
- Barrett, D.S.; Triantafyllou, M.S.; Yue, D.K.P.; Grosenbaugh, M.A.; Wolfgang, M.J. Drag reduction in fish-like locomotion. J. Fluid Mech. 1999, 392, 183–212. [Google Scholar] [CrossRef]
- Wen, L.; Wang, T.; Wu, G.; Liang, J. Hybrid undulatory kinematics of a robotic Mackerel (Scomber scombrus): Theoretical modeling and experimental investigation. Sci. China Technol. Sci. 2012, 55, 2941–2952. [Google Scholar] [CrossRef]
- Wen, L.; Wang, T.; Wu, G.; Li, J. A novel method based on a force-feedback technique for the hydrodynamic investigation of kinematic effects on robotic fish. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Wen, L.; Wang, T.M.; Wu, G.H.; Liang, J.H. Hydrodynamic investigation of a self-propelled robotic fish based on a force-feedback control method. Bioinspiration Biomim. 2012, 7, 036012. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, L.; Liang, J.; Shen, Q.; Bao, L.; Zhang, Q. Hydrodynamic performance of an undulatory robot: Functional roles of the body and caudal fin locomotion. Int. J. Adv. Robot. Syst. 2013, 10. [Google Scholar] [CrossRef]
- Wen, L.; Wang, T.; Wu, G.; Liang, J. Quantitative thrust efficiency of a self-propulsive robotic fish: Experimental method and hydrodynamic investigation. EEE/ASME Trans. Mechatron. 2012, 18, 1027–1038. [Google Scholar] [CrossRef]
- Fujiwara, S.; Yamaguchi, S. Development of Fishlike Robot that Imitates Carangiform and Subcarangiform Swimming Motions. J. Aero Aqua Bio-Mech. 2017, 6, 1–8. [Google Scholar] [CrossRef]
- Kumph, J.M. Maneuvering of a Robotic Pike. Ph.D. Thesis, Massachusetts Institute of Technology, Boston, MA, USA, 2000. [Google Scholar]
- Yu, J.; Zhang, C.; Liu, L. Design and control of a single-motor-actuated robotic fish capable of fast swimming and maneuverability. IEEE/ASME Trans. Mechatron. 2016, 21, 1711–1719. [Google Scholar] [CrossRef]
- Rossi, C.; Coral, W.; Colorado, J.; Barrientos, A. A motor-less and gear-less bio-mimetic robotic fish design. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Rossi, C.; Colorado, J.; Coral, W.; Barrientos, A. Bending continuous structures with SMAs: A novel robotic fish design. Bioinspiration Biomim. 2011, 6, 045005. [Google Scholar] [CrossRef]
- Chen, Z.; Shatara, S.; Tan, X. Modeling of biomimetic robotic fish propelled by an ionic polymermetal composite caudal fin. IEEE/ASME Trans Mechatron. 2010, 27, 448–459. [Google Scholar] [CrossRef]
- Liu, B.; Hao, L.; Deng, J.; Liu, X. A remote operated robotic fish with temperature sensor based on IPMC actuator. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009. [Google Scholar]
- Erturk, A. Macro-fiber composite actuated piezoelectric robotic fish. In Springer Tracts in Mechanical; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Xie, F.; Li, Z.; Ding, Y.; Zhong, Y.; Du, R. An Experimental Study on the Fish Body Flapping Patterns by Using a Biomimetic Robot Fish. EEE Robot. Autom. Lett. 2019, 5, 64–71. [Google Scholar] [CrossRef]
- Webb, P.W. Form and Function in Fish Swimming. Sci. Am. 1984, 251, 72–82. [Google Scholar] [CrossRef]
- Fetherstonhaugh, S.E.A.W.; Shen, Q.; Akanyeti, O. Automatic segmentation of fish midlines for optimizing robot design. Bioinspir. Biomim. 2021, 16, 046005. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson Correlation Coefficient; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. Available online: https://link.springer.com/chapter/10.1007/978-3-642-00296-0_5 (accessed on 10 March 2021).
- Puig-Diví, A.; Escalona-Marfil, C.; Padullés-Riu, J.M.; Busquets, A.; Padullés-Chando, X.; Marcos-Ruiz, D. Validity and reliability of the Kinovea program in obtaining angles and distances using coordinates in 4 perspectives. PLoS ONE 2019, 14, e0216448. [Google Scholar] [CrossRef] [PubMed]
- Marras, S.; Porfiri, M. Fish and robots swimming together: Attraction towards the robot demands biomimetic locomotion. J. R. Soc. Interface 2012, 9, 1856–1868. [Google Scholar] [CrossRef] [PubMed]
- Landgraf, T.; Nguyen, H.; Forgo, S.; Schneider, J.; Schröer, J.; Krüger, C.; Matzke, H.; Clément, R.O.; Krause, J.; Rojas, R. Interactive robotic fish for the analysis of swarm behavior. Lect. Notes Comput. Sci. (Incl. Subser Lect. Notes Artif. Intell. Lect. Notes Bioinform.) 2013, 7928, 1–10. [Google Scholar]
- Boboc, R.; Moga, H.; Talabă, D. A Review of Current Applications in Teleoperation of Mobile Robots. Bull. Transilv. Univ. Bras. Ser. I Eng. Sci. 2012, 40653001. [Google Scholar]
- Sánchez-García, J.; García-Campos, J.; Arzamendia, M.; Reina, D.; Toral, S.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Work per Meter | Strouhal Number | |||||||
|---|---|---|---|---|---|---|---|---|---|
| [13] | |||||||||
| [14] | |||||||||
| [15] | |||||||||
| [16] | |||||||||
| [17] | |||||||||
| [18,19] | |||||||||
| [20] | |||||||||
| [21] | |||||||||
| [22] | 3.55 | ||||||||
| [23] | |||||||||
| [24] | |||||||||
| [25,26,27,28,29] | |||||||||
| [30] | |||||||||
| [31] | |||||||||
| [32] | 8.0 | ||||||||
| [33,34] | 0.39 | ||||||||
| [35] | |||||||||
| [36] | |||||||||
| [37] | 0.075 | 0.243 | 0.31 | 5.0 | 1.4 | 19 | n/a | n/a | n/a |
| Description | Symbol | Value |
|---|---|---|
| Linear coefficient of wave amplitude | ||
| Quadratic coefficient of wave amplitude | ||
| Wavelength | ||
| Body wave number | ||
| Wave frequency |
| Description | Symbol | Value |
|---|---|---|
| Distance between the fulcrum and the point of attachment of the wire | ||
| Length variation for the wire | ||
| Deflection of the oscillating arm in maximal bending position | ||
| Distance between the longitudinal axis and the hole dug into the link for the wire to pass through | ||
| Offset from the fulcrum base where the wire is attached |
| Frequency (Hz) | Voltage (V) |
|---|---|
| 0.75 | 2.15 |
| 1.00 | 2.52 |
| 1.25 | 2.89 |
| 1.50 | 3.26 |
| 1.75 | 3.64 |
| 2.00 | 4.01 |
| 2.25 | 4.38 |
| 2.50 | 4.75 |
| 2.75 | 5.12 |
| 3.00 | 5.49 |
| Frequency (Hz) | |
|---|---|
| Frequency (Hz) | |
|---|---|
| 0.75 | 0.30 |
| 1.00 | 0.35 |
| 1.25 | 0.42 |
| 1.50 | 0.41 |
| 1.75 | 0.44 |
| 2.00 | 0.57 |
| 2.25 | 0.58 |
| 2.50 | 0.60 |
| 2.75 | 0.70 |
| 3.00 | 0.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Romano, D.; Wahi, A.; Miraglia, M.; Stefanini, C. Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System. Machines 2022, 10, 755. https://doi.org/10.3390/machines10090755
Romano D, Wahi A, Miraglia M, Stefanini C. Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System. Machines. 2022; 10(9):755. https://doi.org/10.3390/machines10090755
Chicago/Turabian StyleRomano, Donato, Akshat Wahi, Marco Miraglia, and Cesare Stefanini. 2022. "Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System" Machines 10, no. 9: 755. https://doi.org/10.3390/machines10090755
APA StyleRomano, D., Wahi, A., Miraglia, M., & Stefanini, C. (2022). Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System. Machines, 10(9), 755. https://doi.org/10.3390/machines10090755