
Auto-Encoder-Enabled Anomaly Detection in Acceleration Data: Use Case Study in Container Handling Operations



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
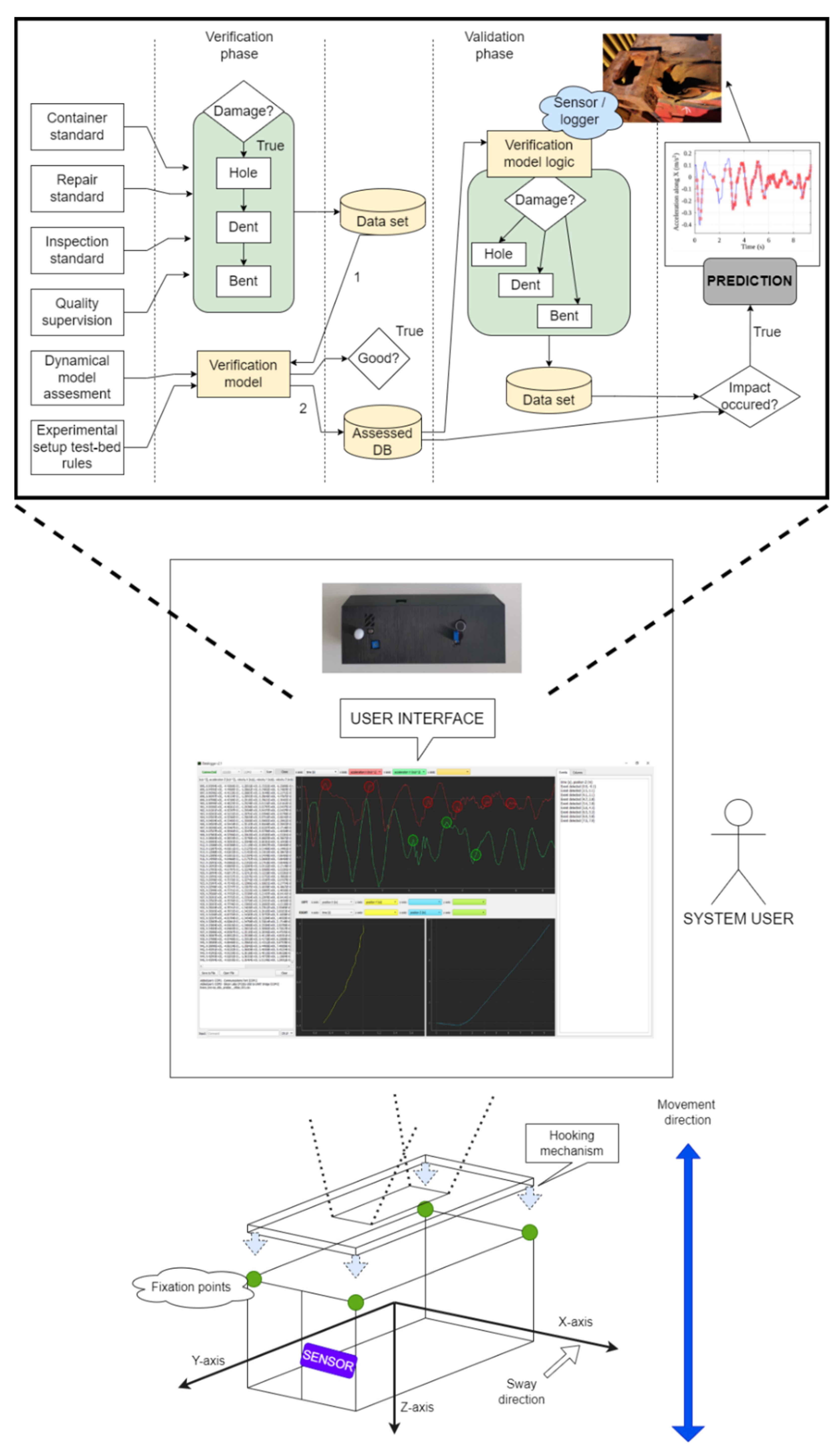
2.1. Detection Module
- A data transmission unit using Bluetooth;
- Raspberry Pi 4 (four ARM A72 1.5 GHz cores, 8 Gb of RAM) with a 128 Gb SD UHS-I memory card;
- A SINDT-232 digital accelerometer with high-stability 200 Hz MPU6050 3-Axis acceleration, having 0.05-degree accuracy and an acceleration range of ±16 g;
- An inner 6000 mAh battery.
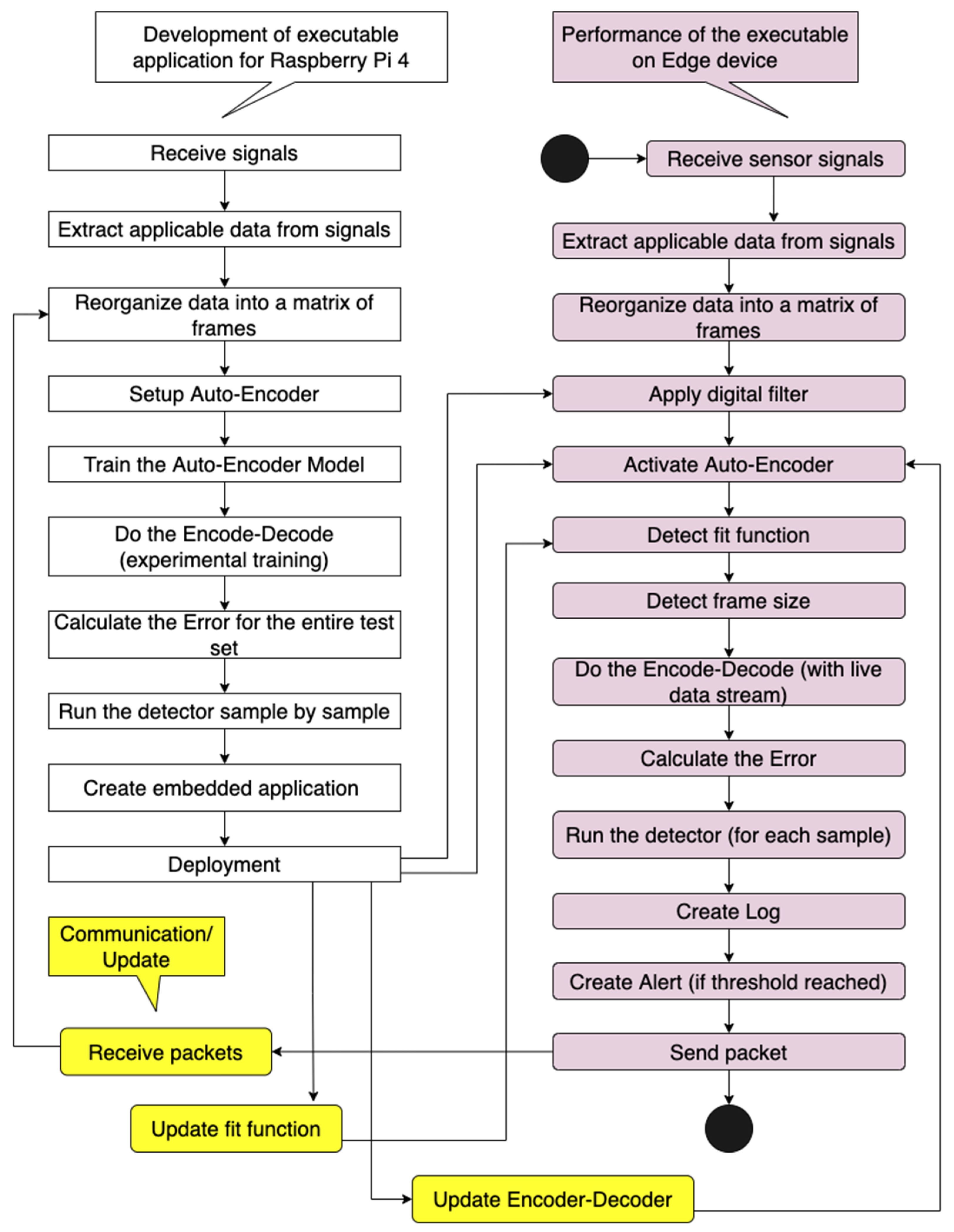
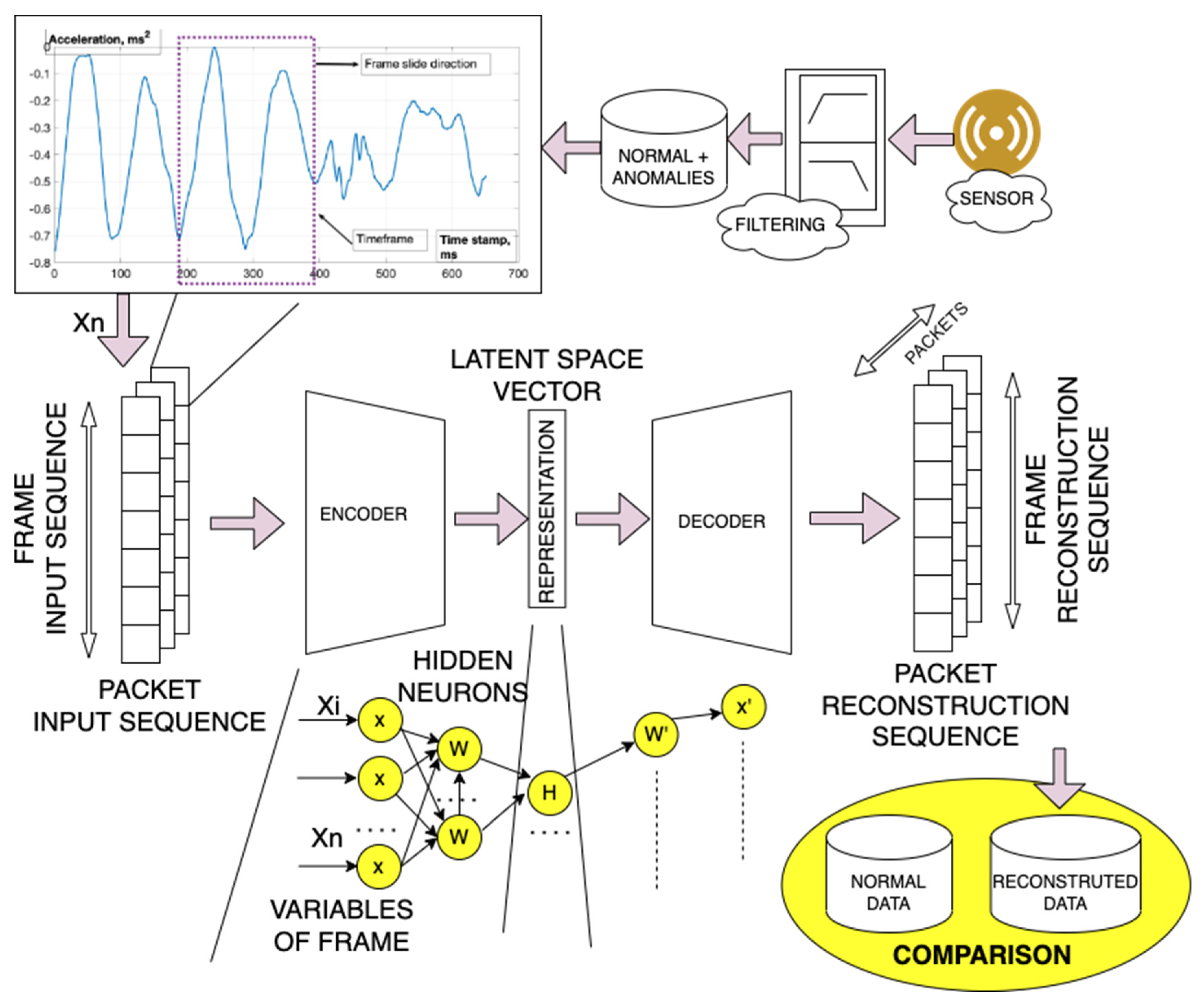
2.2. The Embedded Data Analytics Method and Its Experimental Setup
- -
- the number of data frames for the measurement period T is set as N, being ;
- -
- with the latent space code being , and the restored data frame being ;
- -
- and i being the sensor data sample input to the AE.
- -
- A total of 10 hidden neurons, representing the input (N-dimensional frame of sensor data) with 10 weights.
- -
- A total of 20 hidden neurons, representing the input (N-dimensional frame of sensor data) with 20 weights.
- -
- A total of 30 hidden nodes, representing the input (N-dimensional frame of sensor data) with 30 weights.
- -
- High-pass filter frequency—3.8 Hz,
- -
- Threshold—73%,
- -
- Filter queue—200.
3. Results
3.1. Initial Results
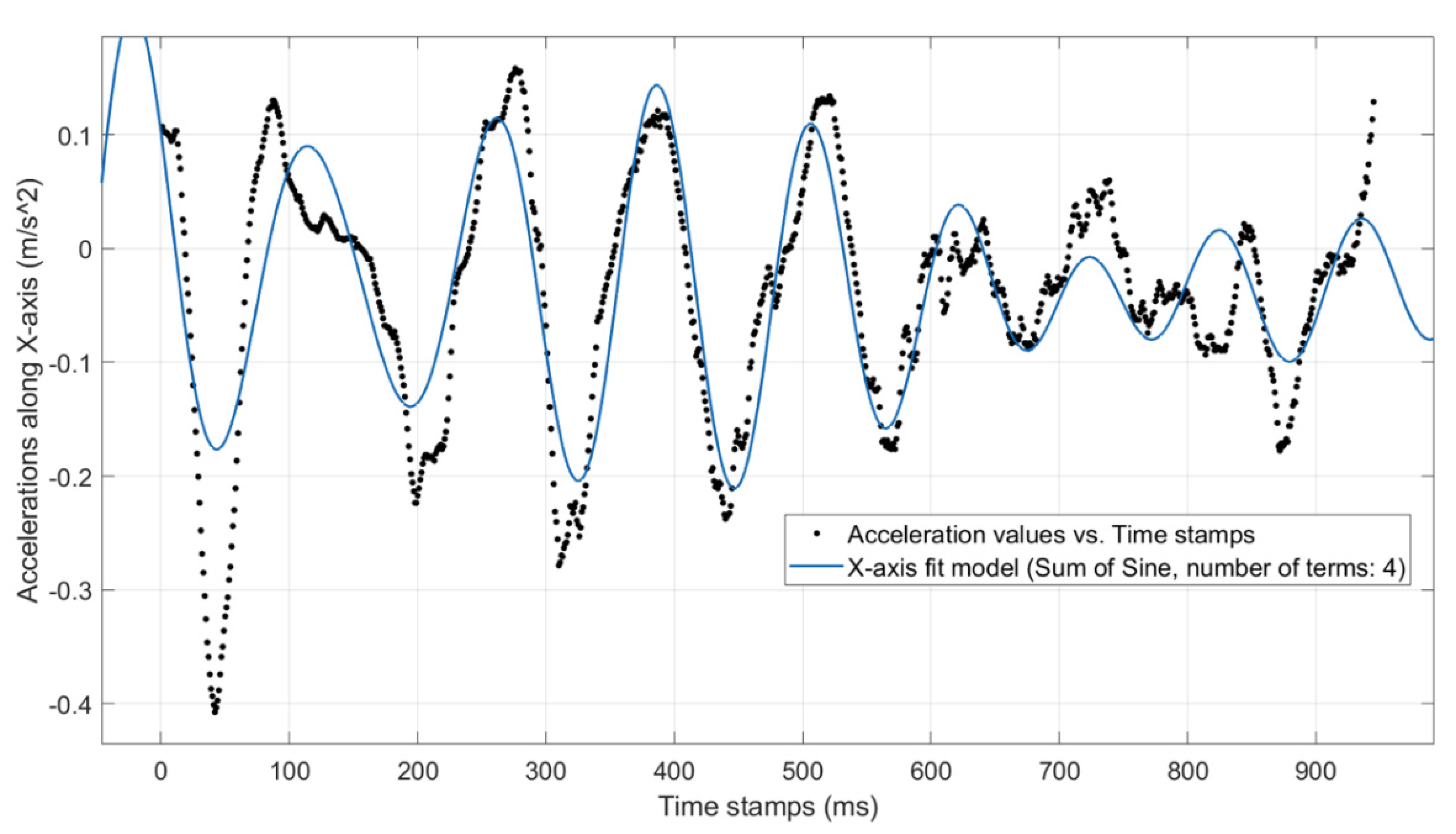
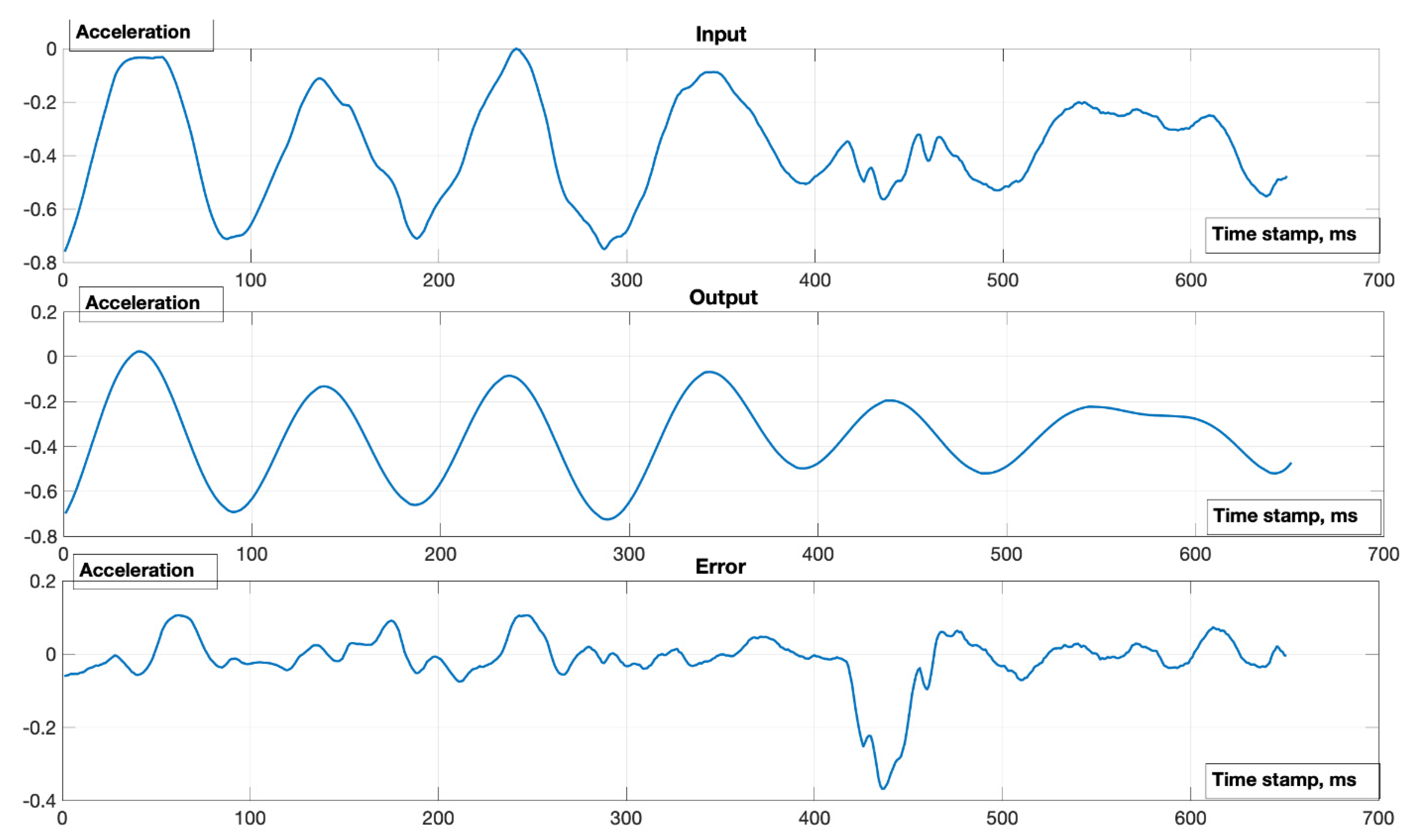
3.2. Experimental Results Using the Proposed Method
4. Discussion
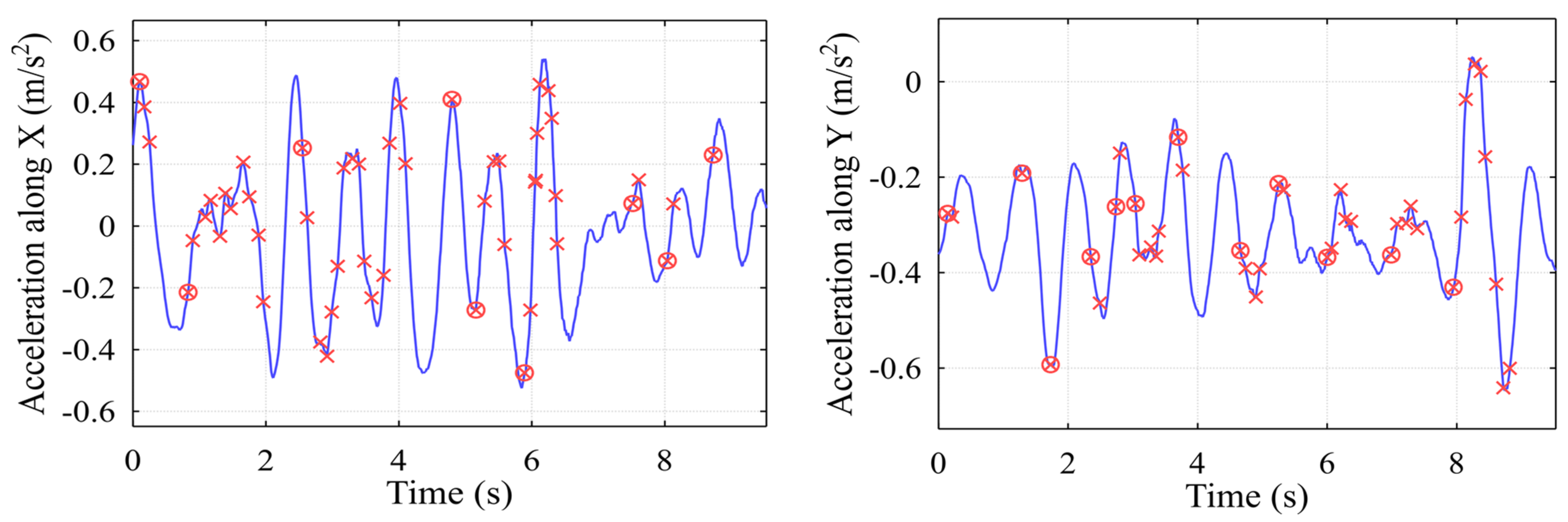
- The measured signals are contaminated by noise components from several other naturally occurring and unnatural processes extraneous to the natural motion of the container [33], including the quay crane and spreader dynamics, as well as environmental and electronic noise.
- This vast disparity in time scales, as well as the issues with signal contamination, pose serious signal processing and de-noising challenges for conventional methods [5], operating in harsh working conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Jakovlev, S.; Andziulis, A.; Senulis, A.; Voznak, M. Intermodal Containers Transportation: How to Deal with Threats? In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems, Heraklion, Greece, 3–5 May 2019; pp. 505–512. [Google Scholar] [CrossRef]
- Eglynas, T.; Jusis, M.; Jakovlev, S.; Senulis, A.; Andziulis, A.; Gudas, S. Analysis of the efficiency of shipping containers handling/loading control methods and procedures. Adv. Mech. Eng. 2019, 11, 1229. [Google Scholar] [CrossRef]
- Jakovlev, S.; Senulis, A.; Kurmis, M.; Lukosius, Z.; Drungilas, D. Intelligent containers network concept, in VEHITS 2018. In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems, Funchal, Portugal, 16–18 March 2018. [Google Scholar] [CrossRef]
- Kim, S.J.; Deng, G.; Gupta, S.K.; Murphy-Hoye, M. Intelligent networked containers for enhancing global supply chain security and enabling new commercial value. In Proceedings of the 2008 3rd International Conference on Communication System Software and Middleware and Workshops, Bangalore, India, 6–10 January 2008; pp. 662–669. [Google Scholar] [CrossRef]
- Jakovlev, S.; Eglynas, T.; Voznak, M.; Jusis, M.; Partila, P.; Tovarek, J.; Jankunas, V. Detecting Shipping Container Impacts with Vertical Cell Guides inside Container Ships during Handling Operations. Sensors 2022, 22, 2752. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Wang, S. Study on Scheduling System Based on Multi-Agent of Container Terminal. In Proceedings of the 2006 10th International Conference on Computer Supported Cooperative Work in Design, Nanjing, China, 3 May 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Andziulis, A.; Harja, J.; Eglynas, T.; Jakovlev, S.; Beniušis, V.; Lenkauskas, T. Application of speed correction algorithm for trains monitoring in an intelligent transport control system. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), ChangChun, China, 16–18 December 2011; pp. 181–184. [Google Scholar]
- Castilla-Rodríguez, I. Simulated annealing based simulation optimization method for solving integrated berth allocation and quay crane scheduling problems. Comput. Ind. Eng. 2018, 61, 140–151. [Google Scholar] [CrossRef]
- Burger, A.; Cichiwskyj, C.; Schmeißer, S.; Schiele, G. The Elastic Internet of Things-A platform for self-integrating and self-adaptive IoT-systems with support for embedded adaptive hardware. Futur. Gener. Comput. Syst. 2020, 113, 607–619. [Google Scholar] [CrossRef]
- Molodova, A.; Li, M.; Núñez, Z. Railway Infrastructure. Inno. Trans. 2014 Rep. 2014, 18, 1980–1990. [Google Scholar]
- Wiseman, Y. Safety Mechanism for SkyTran Tracks. Int. J. Control Autom. 2017, 10, 51–60. [Google Scholar] [CrossRef]
- Baptista, D.; Morgado-dias, F. Comparing Different Implementations for the Levenberg-Marquardt. In Proceedings of the 10th Portuguese Conference on Automatic Control, Funchal, Portugal, 16–18 July 2012; pp. 15–20. Available online: http://www.apca.pt/publicacoes/6/paper12.pdf (accessed on 20 July 2022).
- Sheela, K.G.; Deepa, S.N. Review on Methods to Fix Number of Hidden Neurons in Neural Networks. Math. Probl. Eng. 2013, 2013, 425740. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Xie, X.; Shi, J.; He, W.; Chen, Q.; Chen, L.; Gu, W.; Zhou, T. Denoising Autoencoder, A Deep Learning Algorithm, Aids the Identification of A Novel Molecular Signature of Lung Adenocarcinoma. Genom. Proteom. Bioinform. 2020, 18, 468–480. [Google Scholar] [CrossRef]
- Sabet, M.; Fathi, A.; Daniali, H.M. Optimal design of the Own Ship maneuver in the bearing-only target motion analysis problem using a heuristically supervised Extended Kalman Filter. Ocean. Eng. 2016, 123, 146–153. [Google Scholar] [CrossRef]
- Chen, Y. LSTM recurrent neural network prediction algorithm based on Zernike modal coefficients. Optik 2019, 203, 163796. [Google Scholar] [CrossRef]
- Yao, Y.; Yang, Y.; Wang, Y.; Zhao, X. Artificial intelligence-based hull structural plate corrosion damage detection and recognition using convolutional neural network. Appl. Ocean. Res. 2019, 90, 101823. [Google Scholar] [CrossRef]
- Mejia, J.; Avelar-Sosa, L.; Mederos, B.; Ramírez, E.S.; Roman, J.D.D. Prediction of time series using an analysis filter bank of LSTM units. Comput. Ind. Eng. 2021, 157, 107371. [Google Scholar] [CrossRef]
- Rashid, N.; Hossain, A.F.; Ali, M.; Sukanya, M.I.; Mahmud, T.; Fattah, S.A. AutoCovNet: Unsupervised feature learning using autoencoder and feature merging for detection of COVID-19 from chest X-ray images. Biocybern. Biomed. Eng. 2021, 41, 1685–1701. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Deng, F.; Zhao, J.; Chen, J. Adaptive aggregation-distillation autoencoder for unsupervised anomaly detection. Pattern Recognit. 2022, 131, 108897. [Google Scholar] [CrossRef]
- Yong, B.X.; Brintrup, A. Coalitional Bayesian autoencoders: Towards explainable unsupervised deep learning with applications to condition monitoring under covariate shift. Appl. Soft Comput. 2022, 123, 108912. [Google Scholar] [CrossRef]
- Yang, H.; Qiu, R.C.; Shi, X.; He, X. Unsupervised feature learning for online voltage stability evaluation and monitoring based on variational autoencoder. Electr. Power Syst. Res. 2020, 182, 106253. [Google Scholar] [CrossRef]
- Yan, H.; Liu, Z.; Chen, J.; Feng, Y.; Wang, J. Memory-augmented skip-connected autoencoder for unsupervised anomaly detection of rocket engines with multi-source fusion. ISA Trans. 2022. [Google Scholar] [CrossRef]
- Yang, H.; Ding, W.; Yin, C. AAE-Dpeak-SC: A novel unsupervised clustering method for space target ISAR images based on adversarial autoencoder and density peak-spectral clustering. Adv. Space Res. 2022, 70, 1472–1495. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J. Ultra-local model predictive control: A model-free approach and its application on automated vehicle trajectory tracking. Control Eng. Pract. 2020, 101, 104482. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhu, H.; Hu, K.; Wu, J.; Shao, X.; Wang, Y. Reliability prediction of machinery with multiple degradation characteristics using double-Wiener process and Monte Carlo algorithm. Mech. Syst. Signal Process. 2019, 134, 106333. [Google Scholar] [CrossRef]
- Morozov, D.; Lezoche, M.; Panetto, H. Multi-paradigm modelling of Cyber-Physical Systems. IFAC-Pap. 2018, 51, 1385–1390. [Google Scholar] [CrossRef]
- Maleki, S.; Maleki, S.; Jennings, N.R. Unsupervised anomaly detection with LSTM autoencoders using statistical data-filtering. Appl. Soft Comput. 2021, 108, 107443. [Google Scholar] [CrossRef]
- Xiao, D.; Qin, C.; Yu, H.; Huang, Y.; Liu, C.; Zhang, J. Unsupervised machine fault diagnosis for noisy domain adaptation using marginal denoising autoencoder based on acoustic signals. Meas. J. Int. Meas. Confed. 2021, 176, 109186. [Google Scholar] [CrossRef]
- Eglynas, T.; Andziulis, A.; Bogdevičius, M.; Janutėnienė, J.; Jakovlev, S.; Jankūnas, V.; Senulis, A.; Jusis, M.; Bogdevičius, P.; Gudas, S. Modeling and experimental research of quay crane cargo lowering processes. Adv. Mech. Eng. 2019, 11. [Google Scholar] [CrossRef]
- Wang, J.; Yang, Y. A context-sensitive deep learning approach for microcalcification detection in mammograms. Pattern Recognit. 2018, 78, 12–22. [Google Scholar] [CrossRef]
- Thill, M.; Konen, W.; Wang, H.; Bäck, T. Temporal convolutional autoencoder for unsupervised anomaly detection in time series. Appl. Soft Comput. 2021, 112, 107751. [Google Scholar] [CrossRef]
- Eglynas, T.; Jusis, M.; Jakovlev, S.; Senulis, A.; Partila, P.; Gudas, S. Research of Quay Crane Control Algorithm with Embedded Sway Control Sub-routine. In Proceedings of the 7th Telecommun. Forum, TELFOR 2019, Belgrade, Serbia, 26–27 November 2019; pp. 17–20. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jakovlev, S.; Voznak, M. Auto-Encoder-Enabled Anomaly Detection in Acceleration Data: Use Case Study in Container Handling Operations. Machines 2022, 10, 734. https://doi.org/10.3390/machines10090734
Jakovlev S, Voznak M. Auto-Encoder-Enabled Anomaly Detection in Acceleration Data: Use Case Study in Container Handling Operations. Machines. 2022; 10(9):734. https://doi.org/10.3390/machines10090734
Chicago/Turabian StyleJakovlev, Sergej, and Miroslav Voznak. 2022. "Auto-Encoder-Enabled Anomaly Detection in Acceleration Data: Use Case Study in Container Handling Operations" Machines 10, no. 9: 734. https://doi.org/10.3390/machines10090734
APA StyleJakovlev, S., & Voznak, M. (2022). Auto-Encoder-Enabled Anomaly Detection in Acceleration Data: Use Case Study in Container Handling Operations. Machines, 10(9), 734. https://doi.org/10.3390/machines10090734