
Optimization of Shearer Drum Based on Multi-Objective Bat Algorithm with Grid (MOBA/G)


Abstract
:1. Introduction
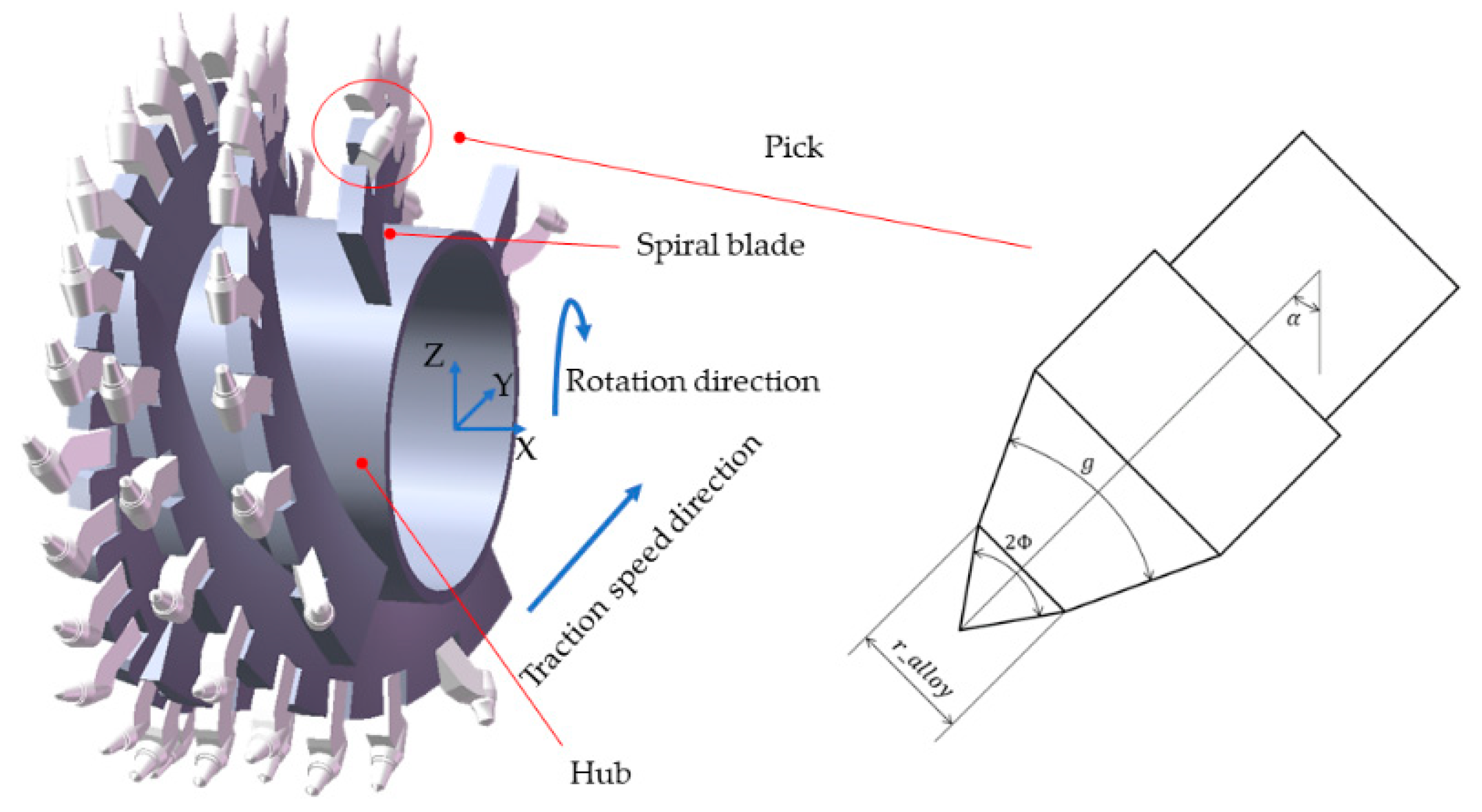
2. Determination of Optimization Objectives
2.1. Torque Acting on Drum
2.2. Specific Energy
2.3. Average Stress Acting on Pick
2.4. Construction of Multi-Objective Optimization Model
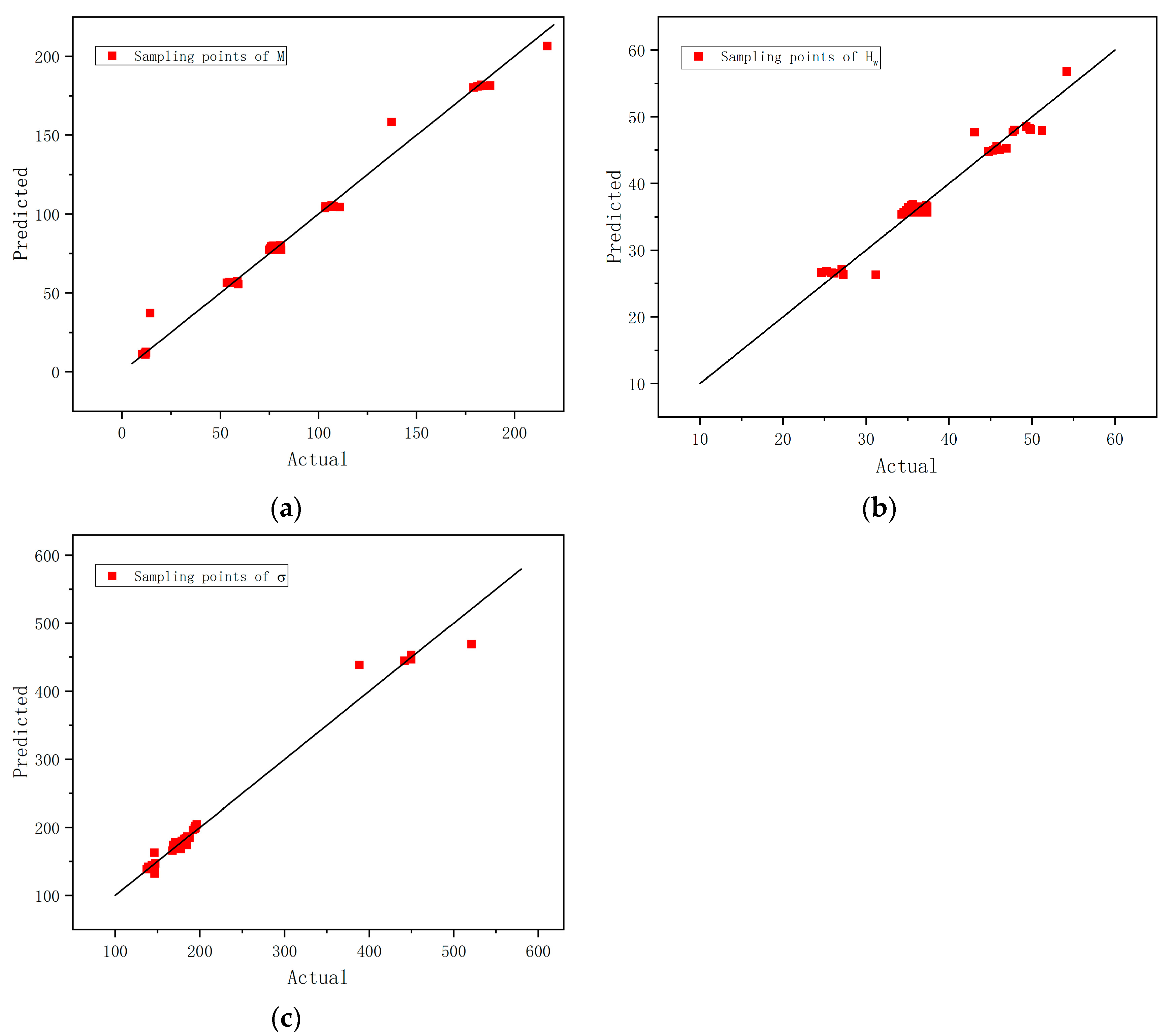
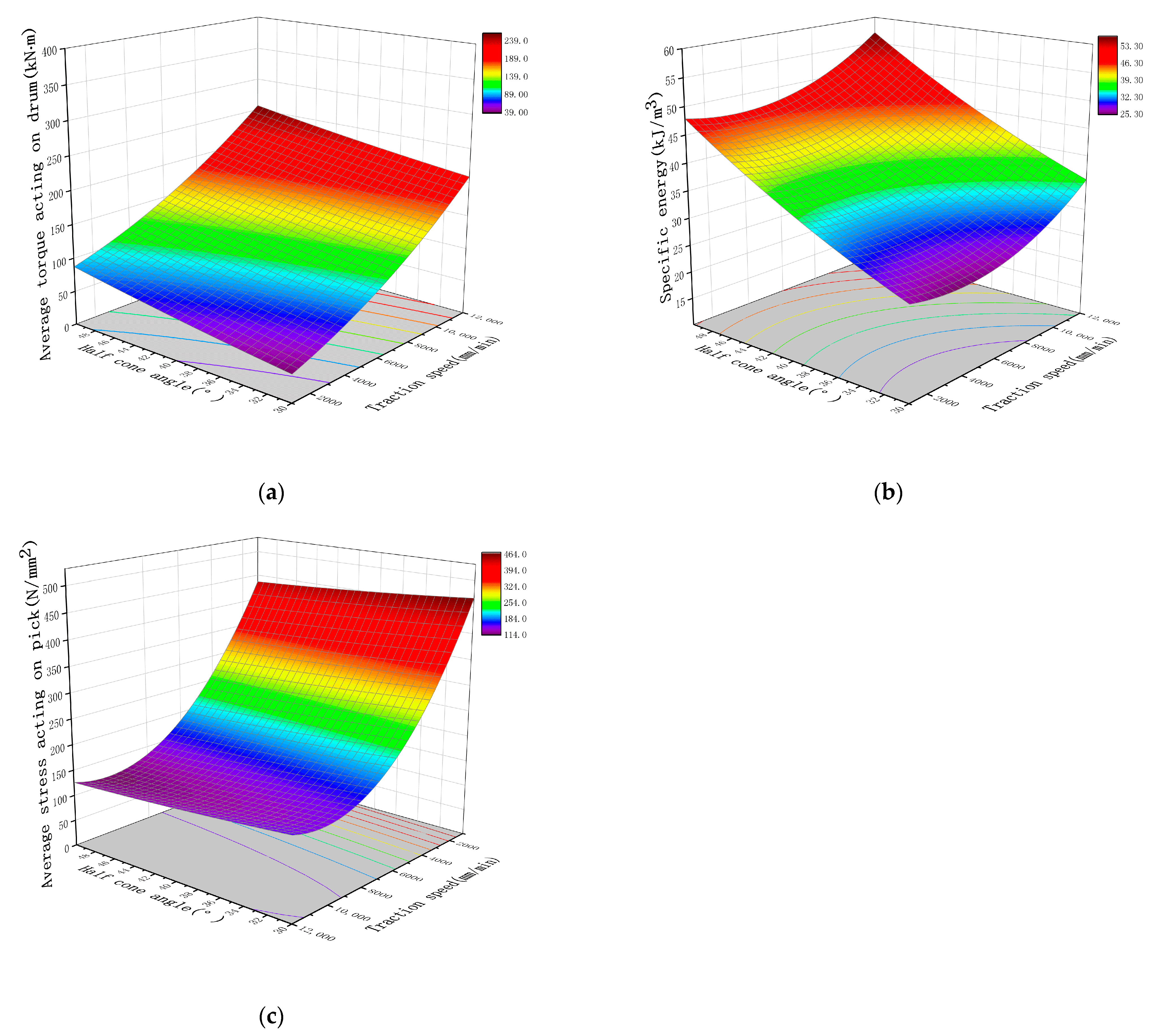
2.5. Response Surface Analysis
3. Optimization Method
3.1. Bat Algorithm
- Bats use echolocation to perceive distance, and they are able to make judgments about food and obstacles;
- Bats fly randomly at position with fixed frequency , loudness , and speed to find food;
- The bat can automatically adjust the frequency according to the distance from the target, and the frequency is guaranteed to be within the range of ;
- The bat emits a positive value of loudness, varying from a larger initial value of to a smaller value of .
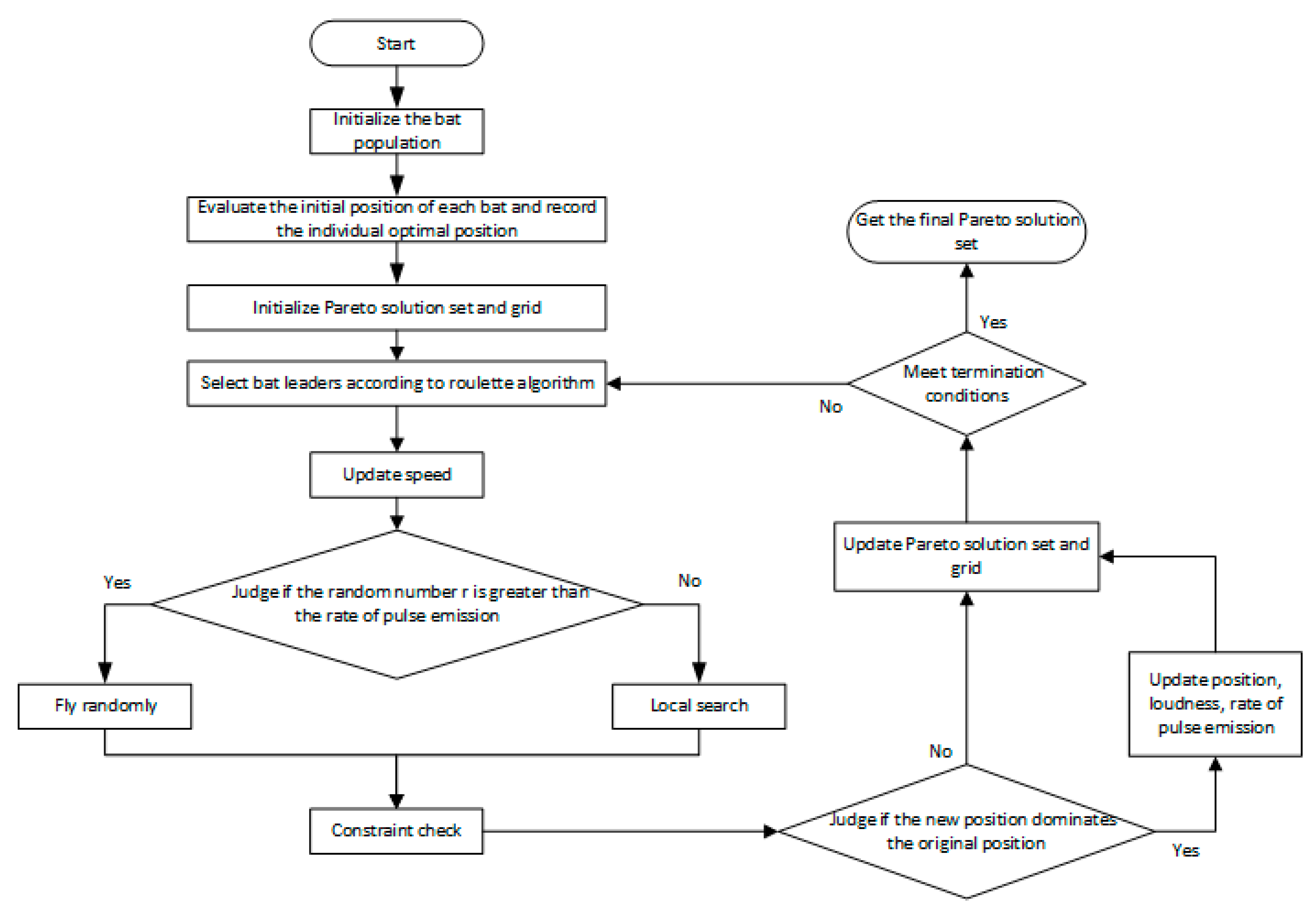
3.2. Multi-Objective Bat Algorithm with Grid
- Dominating relationship: for the two individuals and in the decision set, dominates only when the following relationship is established, which is recorded as ,where is the number of objective functions.
- Pareto solution (nondominant solution): in the feasible domain, is a Pareto solution if and only if does not exist, so that .
- Pareto front: the set of Pareto solutions is called the Pareto optimal solution set, and the set of corresponding objective functions is called the Pareto front.
3.3. Multi-Objective Optimization Process
4. Optimal Design of the Drum of MG500/1130-WD Shearer
4.1. Determination of Constraint Conditions
4.2. Multi-Objective Optimization Result and Analysis
5. Coal Mining Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, C.L.; Liu, S.Y.; Cui, X.X.; Li, T.J. Study on pick arrangement of shearer drum based on load fluctuation. J. China Univ. Min. Technol. 2008, 18, 305–310. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Z. The recent technological development of intelligent mining in China. Engineering 2017, 3, 439–444. [Google Scholar] [CrossRef]
- Wang, G.; Xu, Y.; Ren, H. Intelligent and ecological coal mining as well as clean utilization technology in China: Review and prospects. Int. J. Min. Sci. Technol. 2019, 29, 161–169. [Google Scholar] [CrossRef]
- Li, X.F.; Wang, S. A study on drum cutting properties with full-scale experiments and numerical simulations. Measurement 2018, 114, 25–36. [Google Scholar] [CrossRef]
- Zhao, L.J.; Jin, X. Numerical research on wear characteristics of drum based on discrete element method (DEM). Eng. Fail. Anal. 2020, 109, 104269. [Google Scholar] [CrossRef]
- Liu, H. Study on the wear of spiral drum cutting coal containing rock. Eng. Rep. 2022, 4, e12450. [Google Scholar] [CrossRef]
- Liu, S.; Du, C.; Zhang, J.; Jiang, H. Parameters analysis of shearer drum loading performance. Min. Sci. Technol. (China) 2011, 21, 621–624. [Google Scholar] [CrossRef]
- Gao, K.D.; Xu, W.B. Factors affecting thin coal seam shearer drum coal-loading performance by a model test method. J. Cent. South Univ. 2019, 26, 1619–1636. [Google Scholar] [CrossRef]
- Sun, L.; Zhang, X.; Zeng, Q. Application of a screw conveyor with axial tilt blades on a shearer drum and investigation of conveying performance based on DEM. Particuology 2022, 61, 91–102. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Zhao, X.; Xu, Y.; Chen, Y. A flexible planning methodology for product family assembly line based on improved NSGA_II. Assem. Autom. 2020, 40, 625–639. [Google Scholar] [CrossRef]
- Zhang, L.; Ge, H.; Ma, Y.; Xue, J.; Li, H.; Pecht, M. Multi-objective Optimization Design of a Notch Filter Based on Improved NSGA-II for Conducted Emissions. IEEE Access 2020, 8, 83213–83223. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the Icnn95—International Conference on Neural Networks, IEEE, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Yu, Y.F.; Li, G.; Xu, C. An improved particle swarm optimization algorithm. Appl. Mech. Mater. 2013, 401, 1328–1335. [Google Scholar] [CrossRef]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Chung, H.S.H. Adaptive Particle Swarm Optimization; IEEE Press: Hoboken, NJ, USA, 2009; pp. 1362–1381. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Cao, R.; Li, S.; Ji, Y.; Zhang, Z.; Xu, H.; Zhang, M.; Li, M.; Li, H. Task assignment of multiple agricultural machinery cooperation based on improved ant colony algorithm. Comput. Electron. Agric. 2021, 182, 105993. [Google Scholar] [CrossRef]
- Ge, J.; Yu, D.; Fang, Y. Multi-dimensional QoS Cloud Computing Task Scheduling Strategy Based on Improved Ant Colony Algorithm. J. Phys. Conf. Ser. 2021, 1848, 012031. [Google Scholar] [CrossRef]
- Yang, X. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO); Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Sambariya, D.K.; Prasad, R. Application of Bat Algorithm to Optimize Scaling Factors of Fuzzy Logic-Based Power System Stabilizer for Multimachine Power System. Int. J. Nonlinear Sci. Numer. Simul. 2016, 17, 41–53. [Google Scholar] [CrossRef]
- Wu, Z.; Yu, D. Application of improved bat algorithm for solar PV maximum power point tracking under partially shaded condition. Appl. Soft Comput. 2018, 62, 101–109. [Google Scholar] [CrossRef]
- Qin, Y.; Jin, L.; Zhang, A.; He, B. Rolling Bearing Fault Diagnosis with Adaptive Harmonic Kurtosis and Improved Bat Algorithm. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Audet, C.; Bigeon, J. Performance indicators in multi-objective optimization. Eur. J. Oper. Res. 2021, 292, 397–422. [Google Scholar] [CrossRef]
- Mendrofa, A.H.; Muis, A. Serial Manipulator Control Optimization Using Ant Colony Algorithm. J. Phys. Conf. Ser. 2021, 1993, 012026. [Google Scholar] [CrossRef]
- Aalimahmoody, N.; Bedon, C.; Hasanzadeh-Inanlou, N.; Hasanzade-Inallu, A.; Nikoo, M. BAT Algorithm-Based ANN to Predict the Compressive Strength of Concrete—A Comparative Study. Infrastructures 2021, 6, 80. [Google Scholar] [CrossRef]
- Hemeida, M.G.; Ibrahim, A.A.; Mohamed, A.; Alkhalaf, S.; El-Dine, A.M.B. Optimal allocation of distributed generators DG based Manta Ray Foraging Optimization algorithm (MRFO). Ain Shams Eng. J. 2020, 12, 609–619. [Google Scholar] [CrossRef]
- Qin, S.; Pi, D.; Shao, Z.; Xu, Y. Hybrid Collaborative Multi-objective Fruit Fly Optimization Algorithm for Scheduling Workflow in Cloud Environment. Swarm Evol. Comput. 2022, 68, 101008. [Google Scholar] [CrossRef]
- Zhang, W.; Yuan, J.; Yan, C.; Gao, Z.; Dong, Y. Multi-Objective Optimization Design of Natural Frequency of Two-Degree-of-Freedom Fast Steering Mirror System. IEEE Access 2021, 9, 33689–33703. [Google Scholar] [CrossRef]
- Singh, A.K.; Sadhu, A.; Das, A.K.; Pratihar, D.K.; Choudhury, A.R. An approach towards energy and material efficient additive manufacturing: Multi-objective optimization of stellite-6 deposition on SS304. Opt. Laser Technol. 2022, 148, 107799. [Google Scholar] [CrossRef]
- Mao, J.; Wang, X.; Chen, H.; Zhang, K.; Bai, Y. Optimization Design and System Development of Shearer Drums Based on NSGA-Ⅲ Algorithm. Zhongguo Jixie Gongcheng/China Mech. Eng. 2018, 29, 2335–2341. [Google Scholar]
- Zhao, L.; Fan, J. Shearer’s Helical Drum Multi-objective Optimization Design Based on GA. China Mech. Eng. 2018, 29, 591. [Google Scholar]
- Xu, W. Structure optimization design of transmission system of shearer cutter based on genetic algorithm. J. Phys. Conf. Ser. 2021, 1952, 042106. [Google Scholar] [CrossRef]
- Ren, C.; Xu, J.; Xu, J.; Liu, Y.; Sun, N. Coal–Rock Cutting Sound Denoising Based on Complete Ensemble Empirical Mode Decomposition with Adaptive Noise and an improved Fruit Fly Optimization Algorithm. Machines 2022, 10, 412. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S. Coordinated Speed Planning Strategy of Scraper Conveyor and Shearer Based on Scraper Conveyor Loads Analysis. IOP Conf. Ser. Earth Environ. Sci. 2019, 267, 042044. [Google Scholar] [CrossRef] [Green Version]
- Teale, R. The concept of specific energy in rock drilling. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1965, 2, 57–73. [Google Scholar] [CrossRef]
- Lu, Z.; Wan, L.; Zeng, Q.; Zhang, X.; Gao, K. The structural optimization of roadheader conical picks based on fatigue life. Int. J. Modeling Simul. Sci. Comput. 2018, 9, 1850013. [Google Scholar] [CrossRef]
- Kong, L.; Ma, L.; Jin, H.; Hou, J.; He, G.; Zhang, R. Synthesis of a novel oil-absorption resin and optimization of its performance parameters using response surface design. Polym. Adv. Technol. 2019, 30, 1441–1452. [Google Scholar] [CrossRef]
- Zhang, H.; Li, H.; Zhang, Z.; Hou, T. Optimization of ultrasound-assisted extraction of polysaccharides from perilla seed meal by response surface methodology: Characterization and in vitro antioxidant activities. J. Food Sci. 2021, 86, 306–318. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.S. Firefly Algorithm, Stochastic Test Functions and Design Optimisation. Int. J. Bio-Inspired Comput. 2010, 2, 78–84. [Google Scholar] [CrossRef]
- Miettinen, K. Nonlinear Multiobjective Optimization; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar] [CrossRef]
- Knowles, J.D.; Corne, D.W. Approximating the Nondominated Front Using the Pareto Archived Evolution Strategy. Evol. Comput. 2014, 8, 149–172. [Google Scholar] [CrossRef]
- Coello, C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Schott, J. Fault Tolerant Design Using Single and Multicriteria Genetic Algorithm Optimization. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Parameters | Test Results | ||||||
|---|---|---|---|---|---|---|---|
| Half Cone Angle (°) | Taper Angle of Pick Body (°) | Installation Angle of the Pick (°) | Carbide Head Diameter (mm) | Traction Speed (mm/min) | Average Torque Acting on Drum ) | Specific Energy ) | Average Stress Acting on Pick ) |
| 30 | 15 | 27.5 | 24 | 6500 | 54.77 | 25.28 | 192.14 |
| 50 | 15 | 27.5 | 24 | 6500 | 107.73 | 49.73 | 167.84 |
| 30 | 25 | 27.5 | 24 | 6500 | 58.67 | 27.08 | 196.55 |
| 50 | 25 | 27.5 | 24 | 6500 | 106.78 | 49.29 | 184.38 |
| 40 | 20 | 20 | 16 | 6500 | 79.48 | 36.69 | 171.06 |
| 40 | 20 | 35 | 16 | 6500 | 77.30 | 35.68 | 178.96 |
| 40 | 20 | 20 | 32 | 6500 | 80.66 | 37.23 | 183.88 |
| 40 | 20 | 35 | 32 | 6500 | 75.54 | 34.87 | 183.73 |
| 40 | 15 | 27.5 | 24 | 1000 | 12.30 | 36.89 | 442.00 |
| 40 | 25 | 27.5 | 24 | 1000 | 12.23 | 36.71 | 449.82 |
| 40 | 15 | 27.5 | 24 | 12,000 | 187.58 | 46.90 | 137.46 |
| 40 | 25 | 27.5 | 24 | 12,000 | 183.03 | 45.76 | 147.53 |
| 30 | 20 | 20 | 24 | 6500 | 53.35 | 24.63 | 194.98 |
| 50 | 20 | 20 | 24 | 6500 | 107.96 | 49.83 | 172.20 |
| 30 | 20 | 35 | 24 | 6500 | 59.10 | 27.28 | 194.98 |
| 50 | 20 | 35 | 24 | 6500 | 103.35 | 47.70 | 177.43 |
| 40 | 20 | 27.5 | 16 | 1000 | 11.78 | 35.35 | 449.81 |
| 40 | 20 | 27.5 | 32 | 1000 | 11.76 | 35.28 | 449.81 |
| 40 | 20 | 27.5 | 16 | 12,000 | 184.46 | 46.12 | 147.00 |
| 40 | 20 | 27.5 | 32 | 12,000 | 181.12 | 45.29 | 143.57 |
| 40 | 15 | 20 | 24 | 6500 | 78.86 | 36.40 | 180.52 |
| 40 | 25 | 20 | 24 | 6500 | 77.25 | 35.66 | 187.77 |
| 40 | 15 | 35 | 24 | 6500 | 77.09 | 35.58 | 180.40 |
| 40 | 25 | 35 | 24 | 6500 | 80.93 | 37.36 | 186.06 |
| 30 | 20 | 27.5 | 16 | 6500 | 56.01 | 25.85 | 194.20 |
| 50 | 20 | 27.5 | 16 | 6500 | 103.75 | 47.89 | 177.96 |
| 30 | 20 | 27.5 | 32 | 6500 | 56.74 | 26.19 | 194.98 |
| 50 | 20 | 27.5 | 32 | 6500 | 110.99 | 51.23 | 176.09 |
| 40 | 20 | 20 | 24 | 1000 | 11.89 | 35.68 | 449.81 |
| 40 | 20 | 35 | 24 | 1000 | 11.96 | 35.87 | 449.81 |
| 40 | 20 | 20 | 24 | 12,000 | 182.19 | 45.55 | 138.98 |
| 40 | 20 | 35 | 24 | 12,000 | 179.10 | 44.78 | 144.43 |
| 30 | 20 | 27.5 | 24 | 1000 | 10.39 | 31.17 | 521.21 |
| 50 | 20 | 27.5 | 24 | 1000 | 14.36 | 43.08 | 388.48 |
| 30 | 20 | 27.5 | 24 | 12,000 | 137.25 | 34.32 | 146.43 |
| 50 | 20 | 27.5 | 24 | 12,000 | 216.71 | 54.18 | 146.69 |
| 40 | 15 | 27.5 | 16 | 6500 | 78.32 | 36.15 | 168.78 |
| 40 | 25 | 27.5 | 16 | 6500 | 80.73 | 37.27 | 182.01 |
| 40 | 15 | 27.5 | 32 | 6500 | 76.03 | 35.09 | 181.00 |
| 40 | 25 | 27.5 | 32 | 6500 | 76.83 | 35.46 | 185.57 |
| 40 | 20 | 27.5 | 24 | 6500 | 75.71 | 34.95 | 184.16 |
| 40 | 20 | 27.5 | 24 | 6500 | 75.95 | 35.06 | 184.16 |
| 40 | 20 | 27.5 | 24 | 6500 | 79.84 | 36.85 | 184.16 |
| 40 | 20 | 27.5 | 24 | 6500 | 81.01 | 37.39 | 184.16 |
| 40 | 20 | 27.5 | 24 | 6500 | 74.82 | 34.54 | 184.16 |
| 40 | 20 | 27.5 | 24 | 6500 | 76.57 | 35.35 | 184.16 |
| Items | Response Function of | Response Function of | Response Function of |
|---|---|---|---|
| Prob > F | <0.0001 | <0.0001 | <0.0001 |
| Multi-fitting coefficient | 0.9864 | 0.9598 | 0.9877 |
| Modified multi-fitting coefficient | 0.9825 | 0.9484 | 0.9841 |
| Prediction fitting coefficient | 0.9759 | 0.9295 | 0.9781 |
| Parameter | Parameter Range |
|---|---|
| Half cone angle | |
| Taper angle of pick body | |
| Installation angle of the pick | |
| Carbide head diameter | |
| Traction speed |
| Half Cone Angle (°) | Taper Angle of Pick Body (°) | Installation Angle of the Pick (°) | Carbide Head Diameter (mm) | Traction Speed (mm/min) | |
|---|---|---|---|---|---|
| Before optimization | 50.00 | 15.00 | 20.00 | 32.00 | 1200.00 |
| After optimization (MOBA/G) | 30.00 | 19.73 | 30.16 | 24.80 | 3762.59 |
| Average Torque Acting on Drum | Specific Energy | Average Stress Acting on Pick | |
|---|---|---|---|
| Before optimization | 41.95 | 48.57 | 415.46 |
| After optimization (MOBA/G) | 17.75 | 25.14 | 305.81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, M.; Huang, Q.; Xu, R.; Wang, C.; Xu, J. Optimization of Shearer Drum Based on Multi-Objective Bat Algorithm with Grid (MOBA/G). Machines 2022, 10, 733. https://doi.org/10.3390/machines10090733
Duan M, Huang Q, Xu R, Wang C, Xu J. Optimization of Shearer Drum Based on Multi-Objective Bat Algorithm with Grid (MOBA/G). Machines. 2022; 10(9):733. https://doi.org/10.3390/machines10090733
Chicago/Turabian StyleDuan, Mingyu, Qibai Huang, Ren Xu, Chenlin Wang, and Jing Xu. 2022. "Optimization of Shearer Drum Based on Multi-Objective Bat Algorithm with Grid (MOBA/G)" Machines 10, no. 9: 733. https://doi.org/10.3390/machines10090733
APA StyleDuan, M., Huang, Q., Xu, R., Wang, C., & Xu, J. (2022). Optimization of Shearer Drum Based on Multi-Objective Bat Algorithm with Grid (MOBA/G). Machines, 10(9), 733. https://doi.org/10.3390/machines10090733