
Using Pose-Dependent Model Predictive Control for Path Tracking with Bounded Tensions in a 3-DOF Spatial Cable Suspended Parallel Robot




Abstract
:1. Introduction
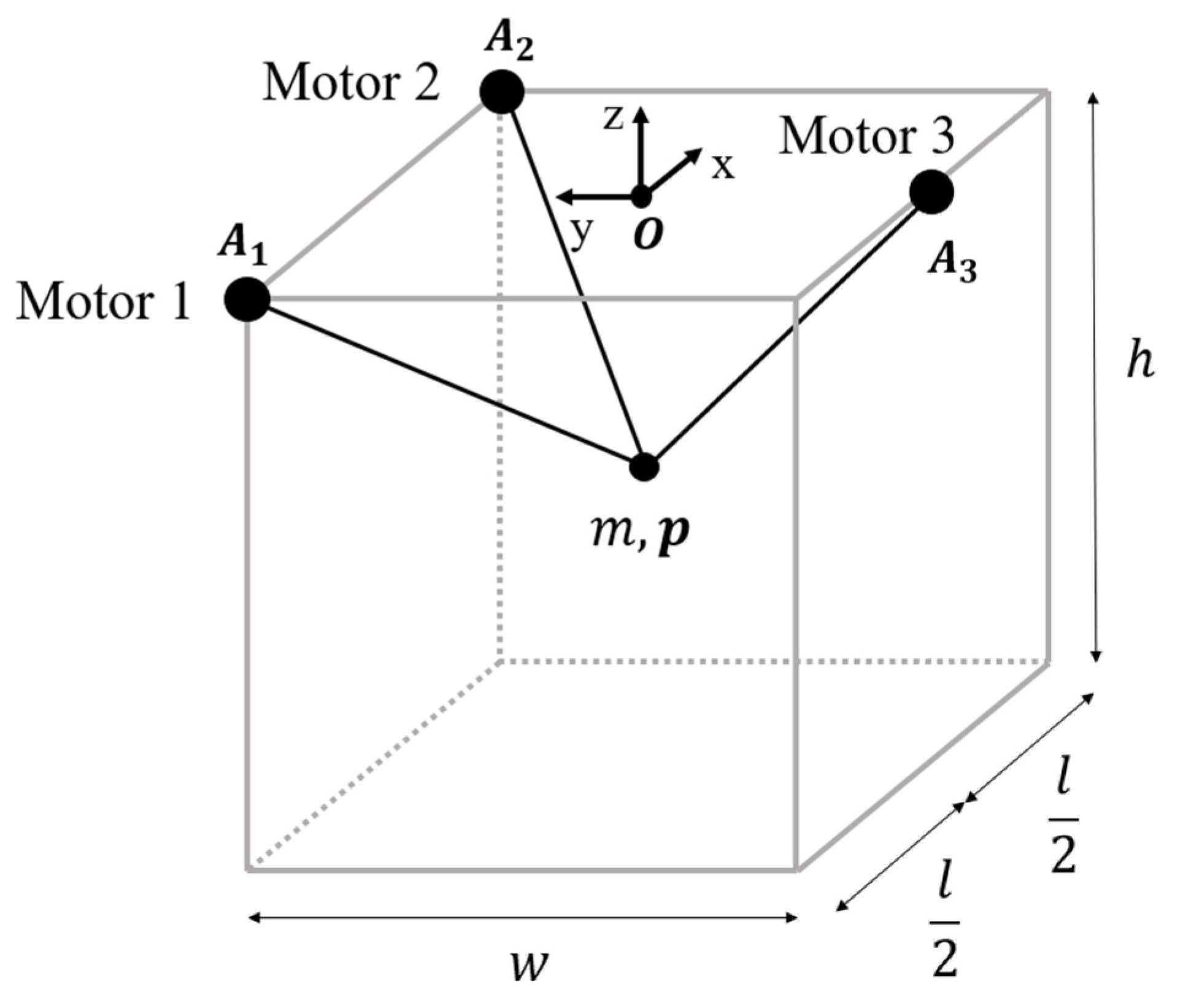
2. Dynamic Model of the Suspended Load
3. Control Design
3.1. Control Architecture
3.2. Model Formulation for Control Design
3.3. Calculation of the Optimal Tensions
3.4. Calculation of Motor Torques
4. Numerical Results
4.1. Description of the Test Case
4.2. Test Cases
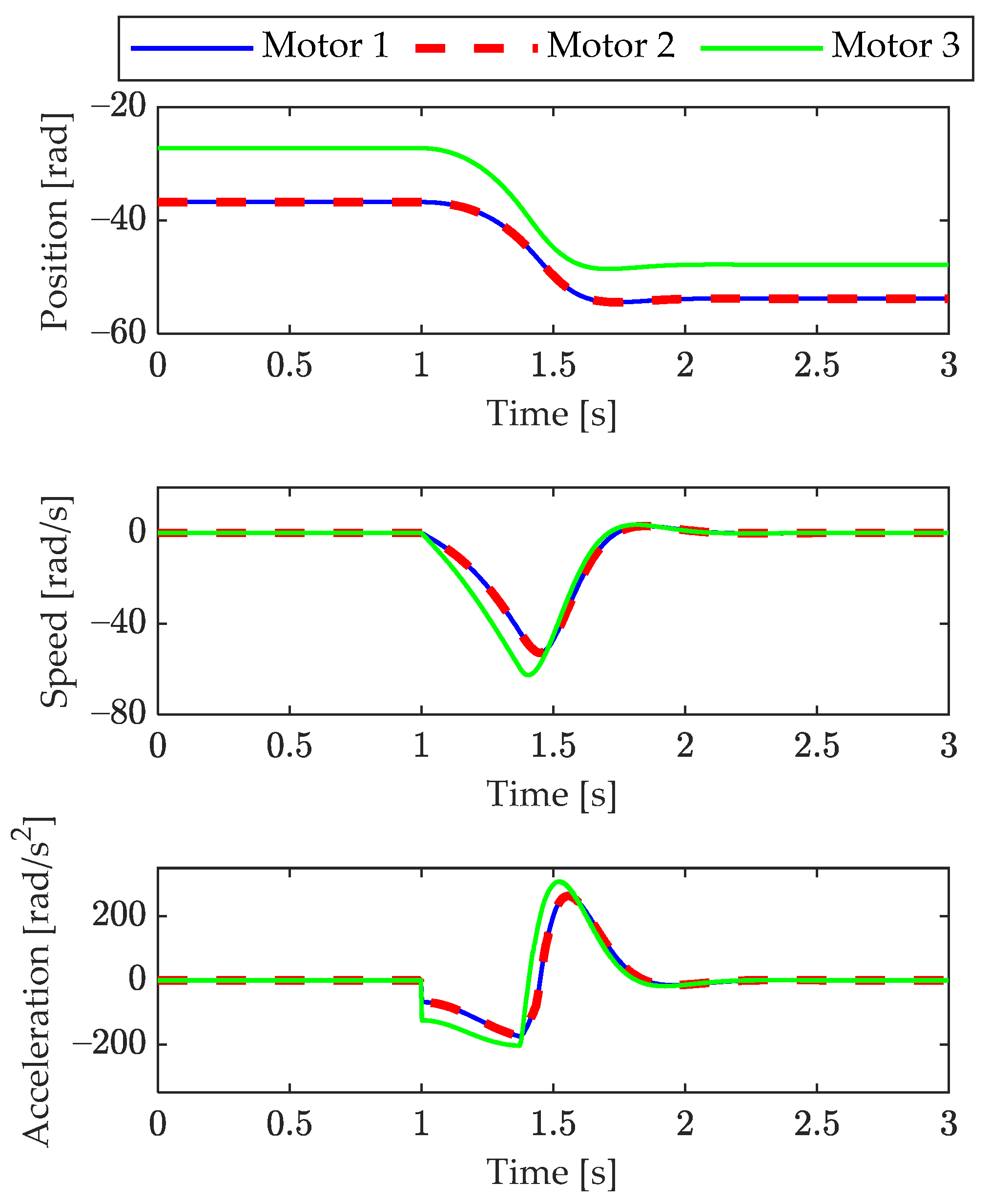
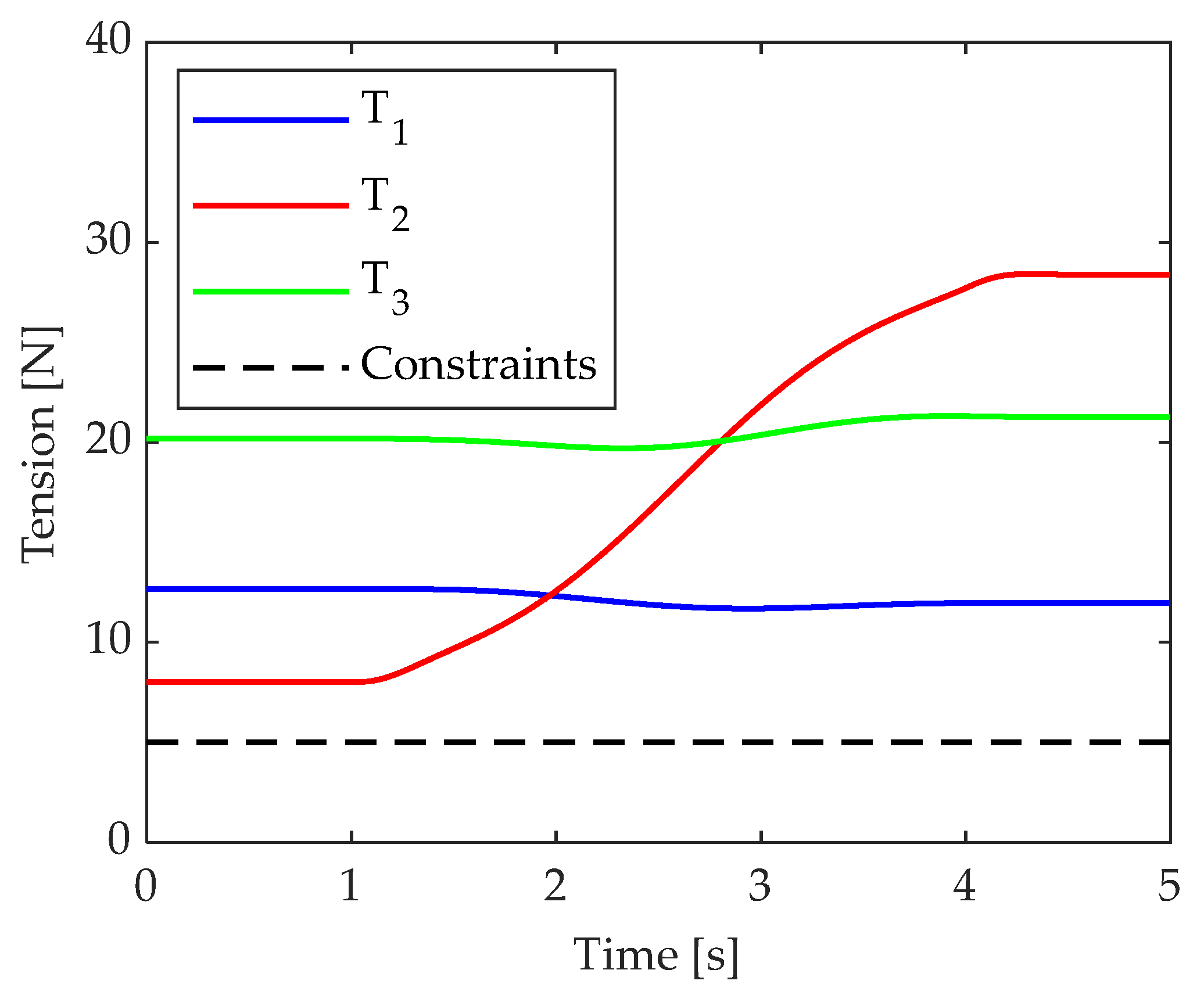
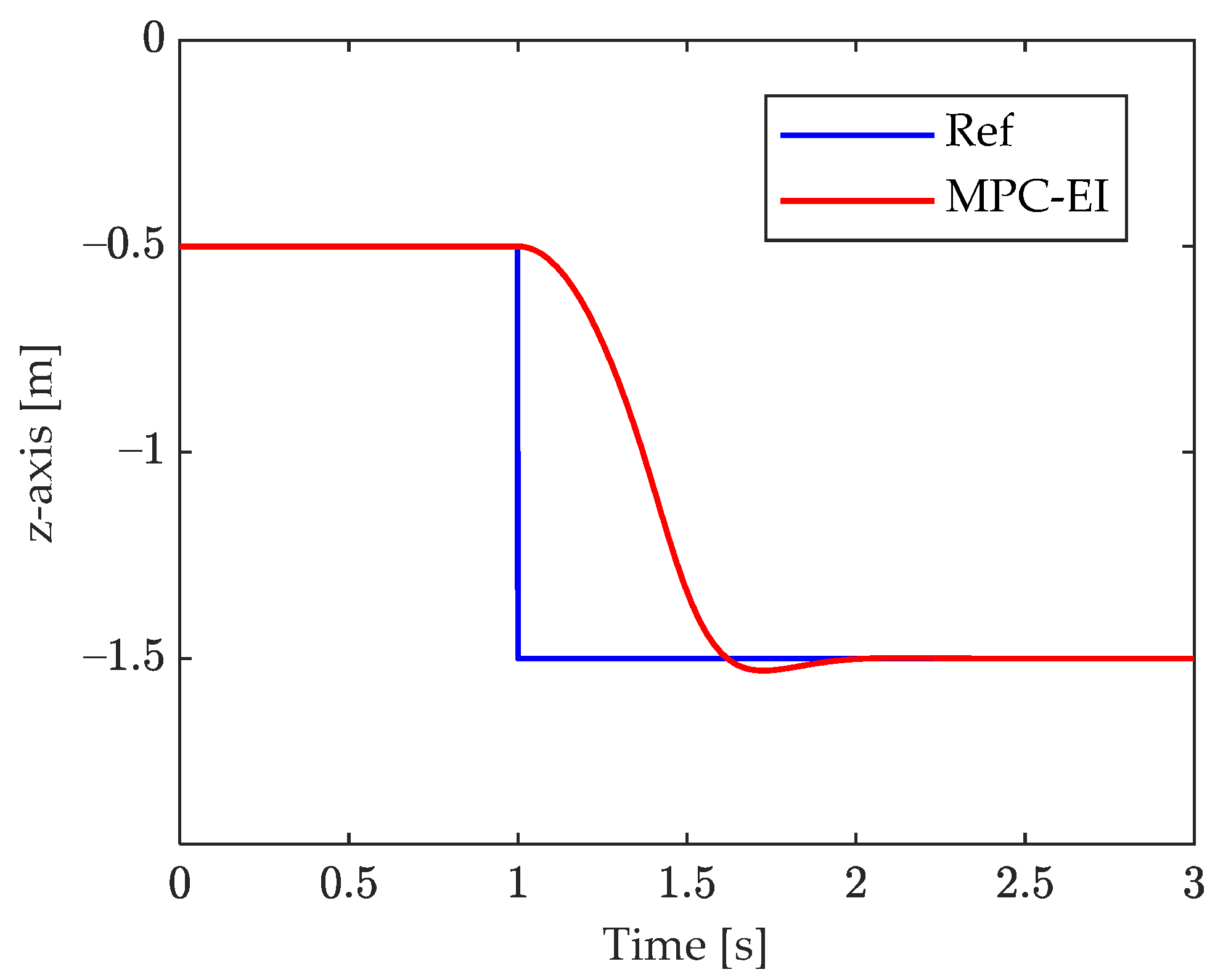
4.2.1. Test 1: Point-to-Point Motion through a Position Step Reference
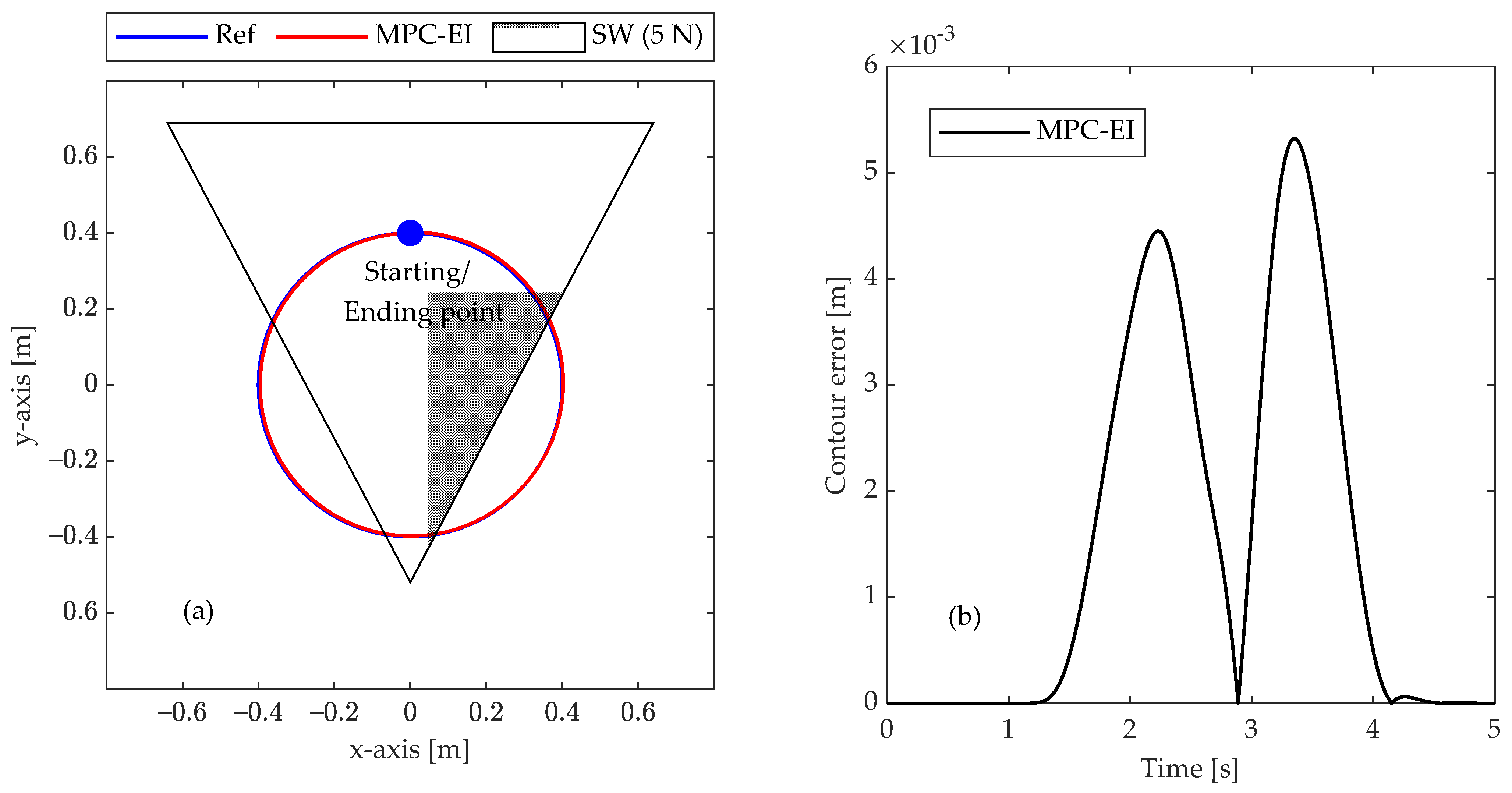
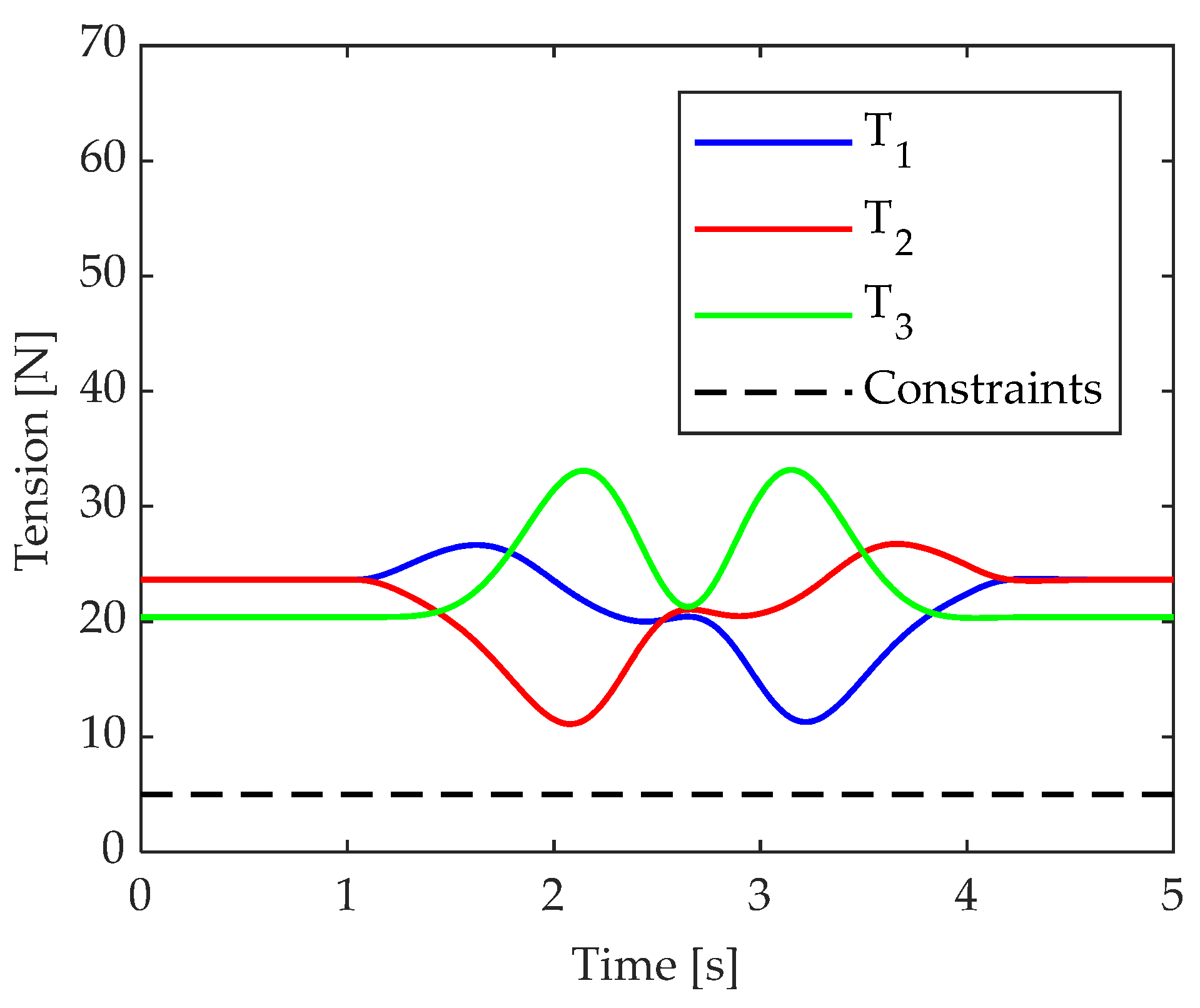
4.2.2. Test 2: Circular Path
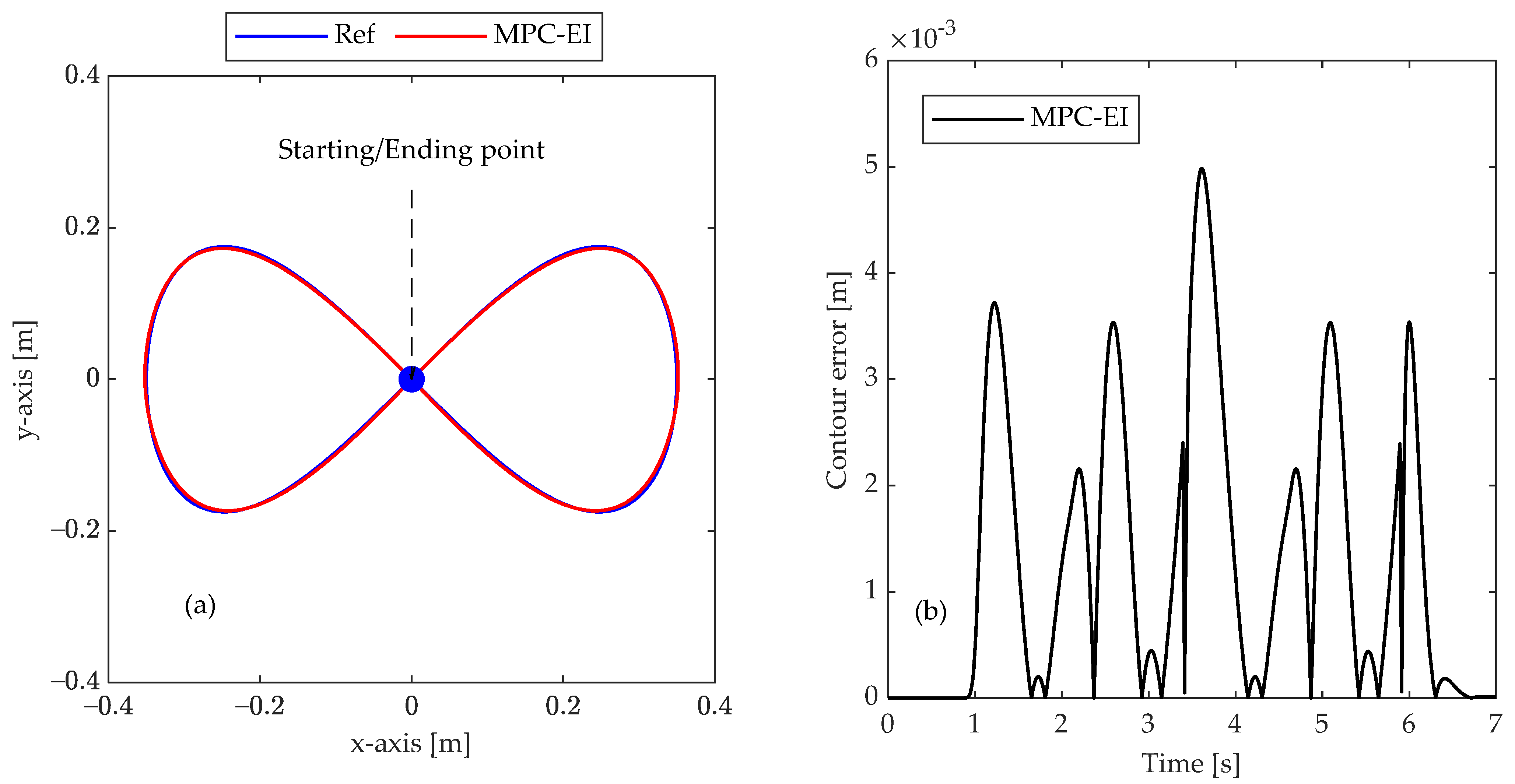
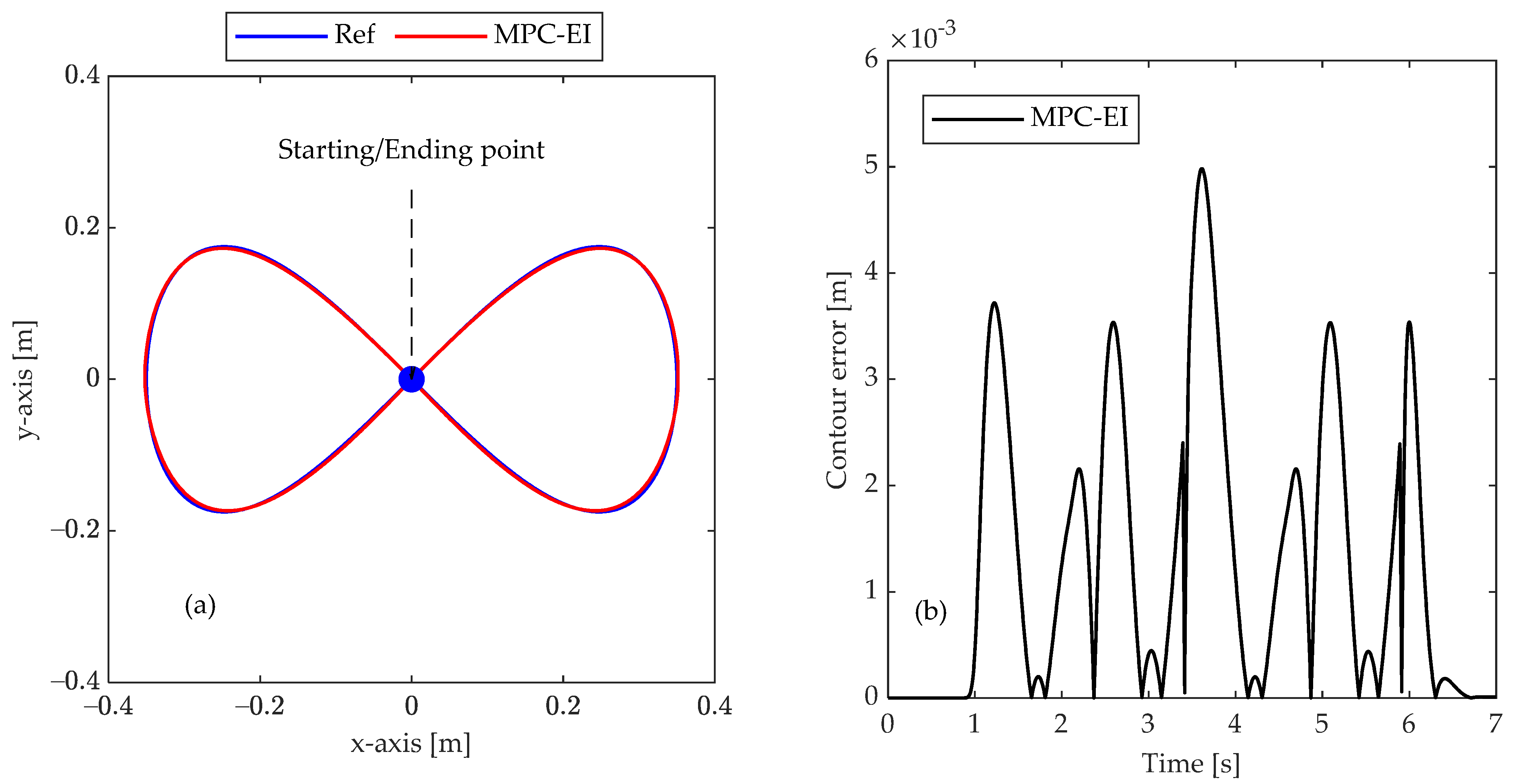
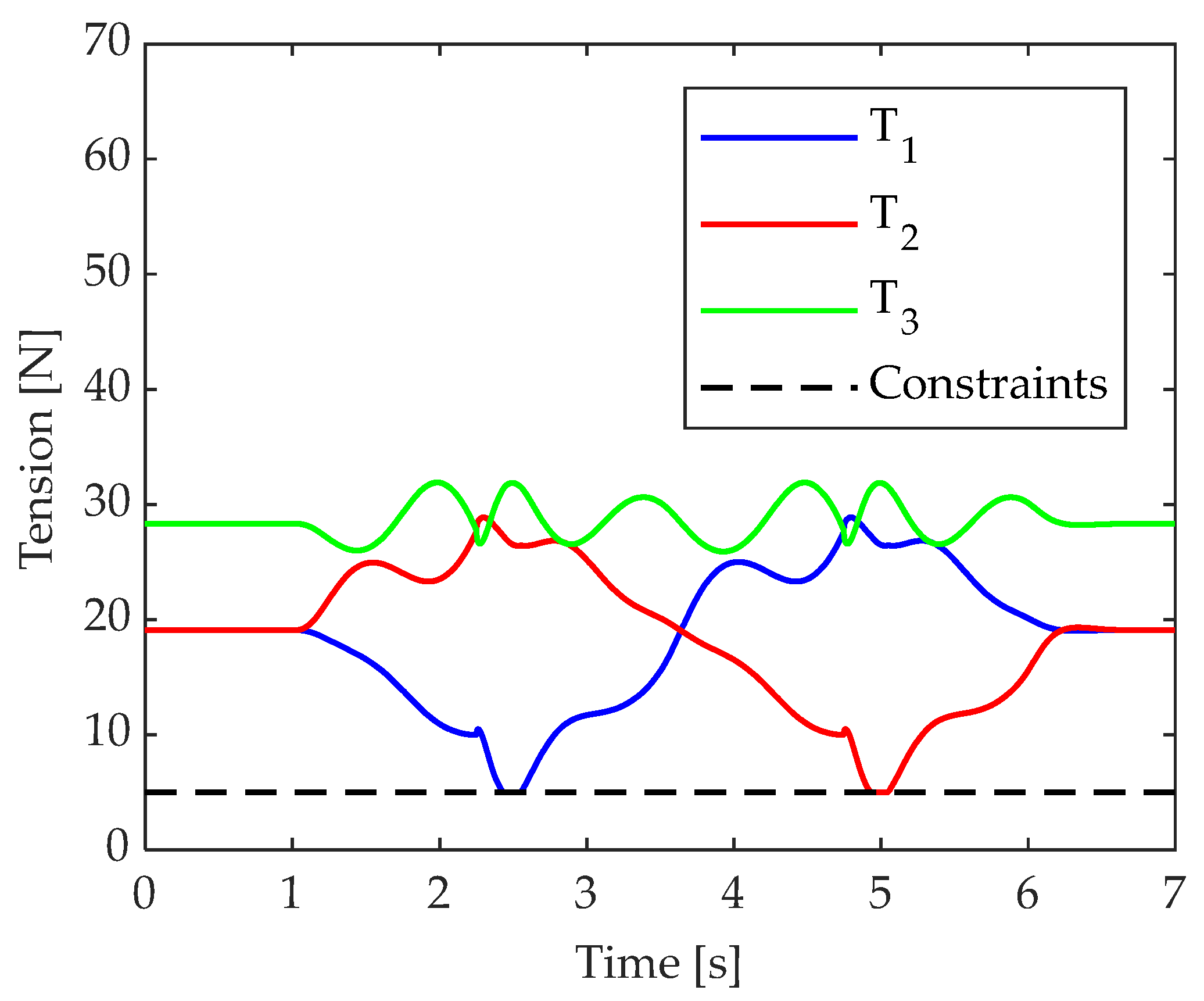
4.2.3. Test 3: Gerono’s Lemniscate Path
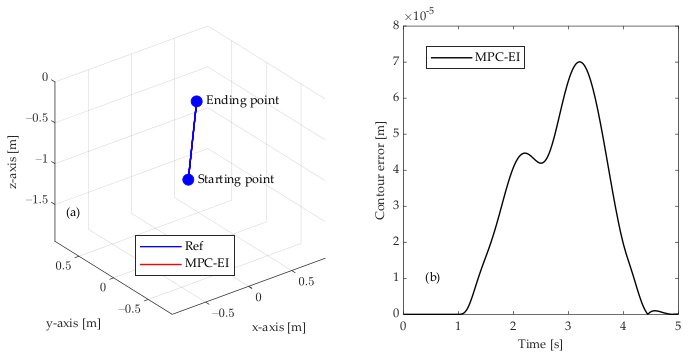
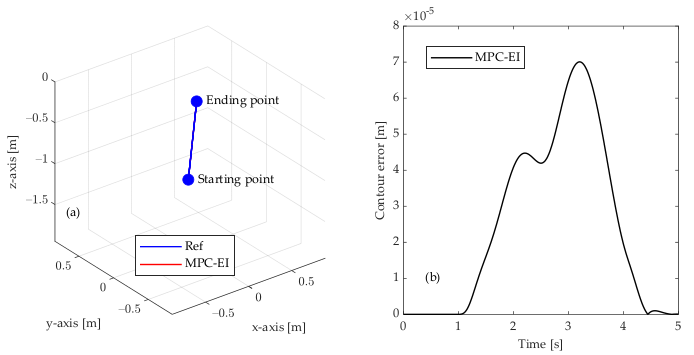
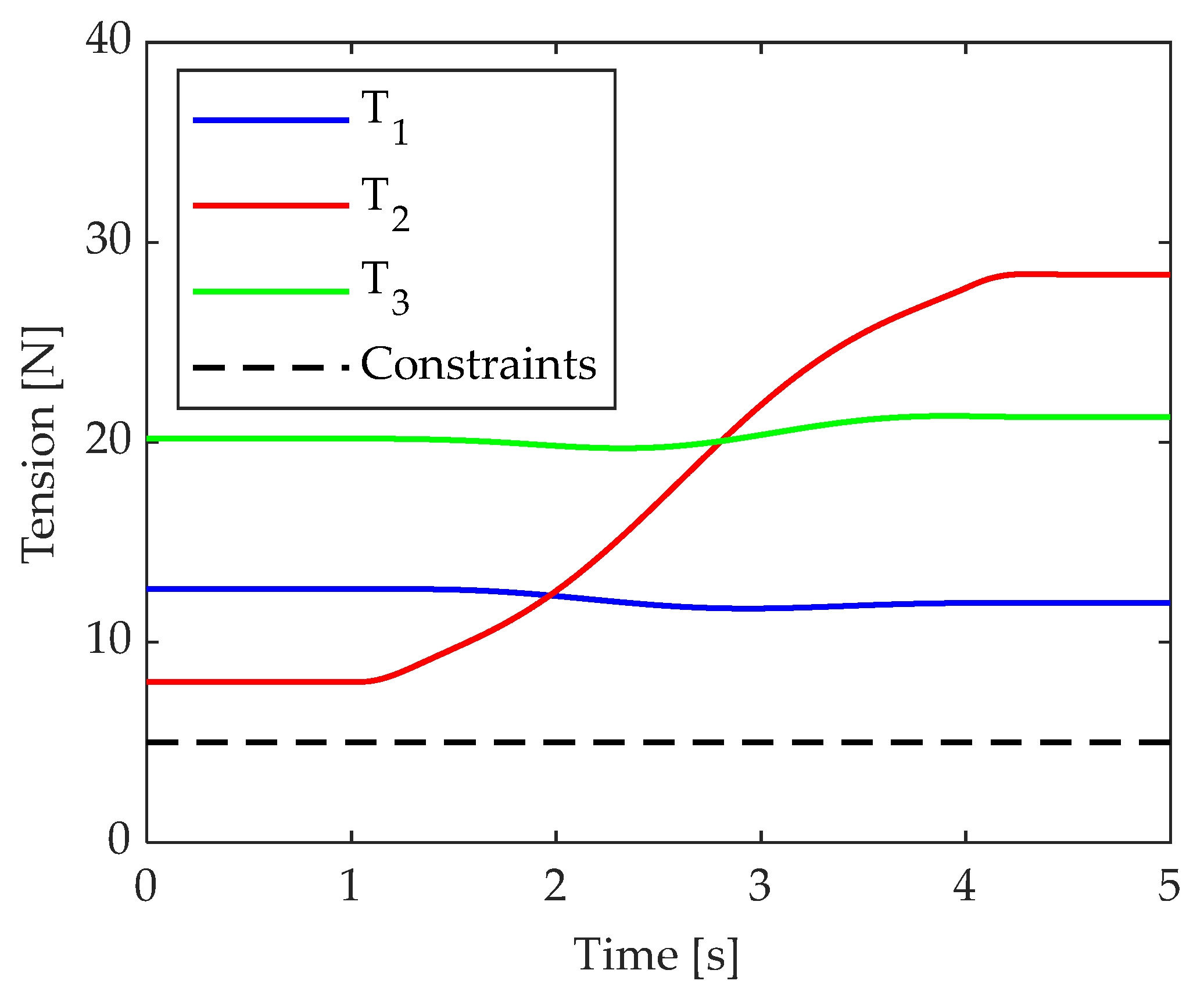
4.2.4. Test 4: Straight Line
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Scalera, L.; Gallina, P.; Seriani, S.; Gasparetto, A. Cable-Based Robotic Crane (CBRC): Design and Implementation of Overhead Traveling Cranes Based on Variable Radius Drums. IEEE Trans. Robot. 2018, 34, 474–485. [Google Scholar] [CrossRef]
- Williams II, R.L.; Gallina, P. Planar cable-direct-driven robots: Design for wrench exertion. J. Intell. Robot. Syst. 2002, 35, 203–219. [Google Scholar] [CrossRef]
- Mattioni, V.; Ida’, E.; Carricato, M. Design of a planar cable-driven parallel robot for non-contact tasks. Appl. Sci. 2021, 11, 9491. [Google Scholar] [CrossRef]
- Mattioni, V.; Idà, E.; Carricato, M. Force-Distribution Sensitivity to Cable-Tension Errors: A Preliminary Investigation. In Proceedings of the International Conference on Cable-Driven Parallel Robots, Virtual Conference, 7–9 July 2021; Springer: Cham, Switzerland, 2021; pp. 129–141. [Google Scholar]
- Trevisani, A. Underconstrained planar cable-direct-driven robots: A trajectory planning method ensuring positive and bounded cable tensions. Mechatronics 2010, 20, 113–127. [Google Scholar] [CrossRef]
- Zhang, N.; Shang, W.; Cong, S. Dynamic trajectory planning for a spatial 3-DoF cable-suspended parallel robot. Mech. Mach. Theory 2018, 122, 177–196. [Google Scholar] [CrossRef]
- Korayem, M.H.; Tourajizadeh, H.; Bamdad, M. Dynamic load carrying capacity of flexible cable suspended robot: Robust feedback linearization control approach. J. Intell. Robot. Syst. Theory Appl. 2010, 60, 341–363. [Google Scholar] [CrossRef]
- Khosravi, M.A.; Taghirad, H.D. Robust PID control of fully-constrained cable driven parallel robots. Mechatronics 2014, 24, 87–97. [Google Scholar] [CrossRef]
- Heyden, T.; Maier, T.; Woernle, C. Trajectory Tracking Control for a Cable Suspension Manipulator. In Advances in Robot Kinematics; Springer: Dordrecht, The Netherlands, 2002; pp. 125–134. [Google Scholar] [CrossRef]
- Boscariol, P.; Gasparetto, A.; Zanotto, V. Active position and vibration control of a flexible links mechanism using model-based predictive control. J. Dyn. Syst. Meas. Control Trans. ASME 2010, 132, 014506. [Google Scholar] [CrossRef]
- Boscariol, P.; Gasparetto, A.; Zanotto, V. Simultaneous position and vibration control system for flexible link mechanisms. Meccanica 2011, 46, 723–737. [Google Scholar] [CrossRef]
- Ghasemi, A.; Eghtesad, M.; Farid, M. Constrained model predictive control of the redundant cable robots. In Proceedings of the 2008 World Automation Congress, Waikoloa, HI, USA, 28 September–2 October 2008. [Google Scholar]
- Qi, R.; Rushton, M.; Khajepour, A.; Melek, W.W. Decoupled modeling and model predictive control of a hybrid cable-driven robot (HCDR). Rob. Auton. Syst. 2019, 118, 1–12. [Google Scholar] [CrossRef]
- Song, C.; Lau, D. Workspace-Based Model Predictive Control for Cable-Driven Robots. IEEE Trans. Robot. 2022, 1–20. [Google Scholar] [CrossRef]
- Santos, J.C.; Chemori, A.; Gouttefarde, M. Redundancy Resolution Integrated Model Predictive Control of CDPRs: Concept, Implementation and Experiments. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3889–3895. [Google Scholar] [CrossRef]
- Xiang, S.; Gao, H.; Liu, Z.; Gosselin, C. Dynamic transition trajectory planning of three-DOF cable-suspended parallel robots via linear time-varying MPC. Mech. Mach. Theory 2020, 146, 103715. [Google Scholar] [CrossRef]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB®; Springer: London, UK, 2009; ISBN 978-1-84882-331-0. [Google Scholar]
- Riehl, N.; Gouttefarde, M.; Baradat, C.; Pierrot, F. On the determination of cable characteristics for large dimension cable-driven parallel mechanisms. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4709–4714. [Google Scholar] [CrossRef]
- Khosravi, M.A.; Taghirad, H.D. Dynamic analysis and control of cable driven robots with elastic cables. Trans. Can. Soc. Mech. Eng. 2011, 35, 543–557. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, D.Q.; Gouttefarde, M.; Company, O.; Pierrot, F. On the simplifications of cable model in static analysis of large-dimension cable-driven parallel robots. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 928–934. [Google Scholar] [CrossRef] [Green Version]
- Sanalitro, D.; Savino, H.J.; Tognon, M.; Cortés, J.; Franchi, A. Full-Pose Manipulation Control of a Cable-Suspended Load with Multiple UAVs under Uncertainties. IEEE Robot. Autom. Lett. 2020, 5, 2185–2191. [Google Scholar] [CrossRef] [Green Version]
- Oh, S.R.; Agrawal, S.K. Cable Suspended Planar Robots With Redundant Cables: Controllers With Positive Tensions. IEEE Trans. Robot. 2005, 21, 457–465. [Google Scholar] [CrossRef]
- Lahouar, S.; Ottaviano, E.; Zeghoul, S.; Romdhane, L.; Ceccarelli, M. Collision free path-planning for cable-driven parallel robots. Rob. Auton. Syst. 2009, 57, 1083–1093. [Google Scholar] [CrossRef]
- Carretero, J.A.; Ebrahimi, I.; Boudreau, R. Overall Motion Planning for Kinematically Redundant Parallel Manipulators. J. Mech. Robot. 2012, 4, 024502. [Google Scholar] [CrossRef]
- Rasheed, T.; Marquez-Gamez, D.; Long, P.; Caro, S. Optimal kinematic redundancy planning for planar mobile cable-driven parallel robots. In Proceedings of the The ASME 2018 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018; Volume 5B-2018, pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Vieira, H.L.; Fontes, J.V.C.; Beck, A.T.; Da Silva, M.M. Reliable and Failure-Free Workspaces for Motion Planning Algorithms for Parallel Manipulators Under Geometrical Uncertainties. J. Comput. Nonlinear Dyn. 2019, 14, 021005. [Google Scholar] [CrossRef]
- Araújo, J.M.; Bettega, J.; Dantas, N.J.B.; Dórea, C.E.T.; Richiedei, D.; Tamellin, I. Vibration Control of a Two-Link Flexible Robot Arm with Time Delay through the Robust Receptance Method. Appl. Sci. 2021, 11, 9907. [Google Scholar] [CrossRef]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Trajectory Planning in Robotics. Math. Comput. Sci. 2012, 6, 269–279. [Google Scholar] [CrossRef]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path Planning and Trajectory Planning Algorithms: A General Overview. In Motion and Operation Planning of Robotic Systems. Mechanisms and Machine Science; Springer: Cham, Switzerland, 2015; Volume 29. [Google Scholar] [CrossRef]
- Boscariol, P.; Richiedei, D. Optimization of motion planning and control for automatic machines, robots and multibody systems. Appl. Sci. 2020, 10, 4982. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bettega, J.; Richiedei, D.; Trevisani, A. Using Pose-Dependent Model Predictive Control for Path Tracking with Bounded Tensions in a 3-DOF Spatial Cable Suspended Parallel Robot. Machines 2022, 10, 453. https://doi.org/10.3390/machines10060453
Bettega J, Richiedei D, Trevisani A. Using Pose-Dependent Model Predictive Control for Path Tracking with Bounded Tensions in a 3-DOF Spatial Cable Suspended Parallel Robot. Machines. 2022; 10(6):453. https://doi.org/10.3390/machines10060453
Chicago/Turabian StyleBettega, Jason, Dario Richiedei, and Alberto Trevisani. 2022. "Using Pose-Dependent Model Predictive Control for Path Tracking with Bounded Tensions in a 3-DOF Spatial Cable Suspended Parallel Robot" Machines 10, no. 6: 453. https://doi.org/10.3390/machines10060453
APA StyleBettega, J., Richiedei, D., & Trevisani, A. (2022). Using Pose-Dependent Model Predictive Control for Path Tracking with Bounded Tensions in a 3-DOF Spatial Cable Suspended Parallel Robot. Machines, 10(6), 453. https://doi.org/10.3390/machines10060453