
A Novel Modular Biomimetic Live Working Robot for Power Distribution Line †

Abstract
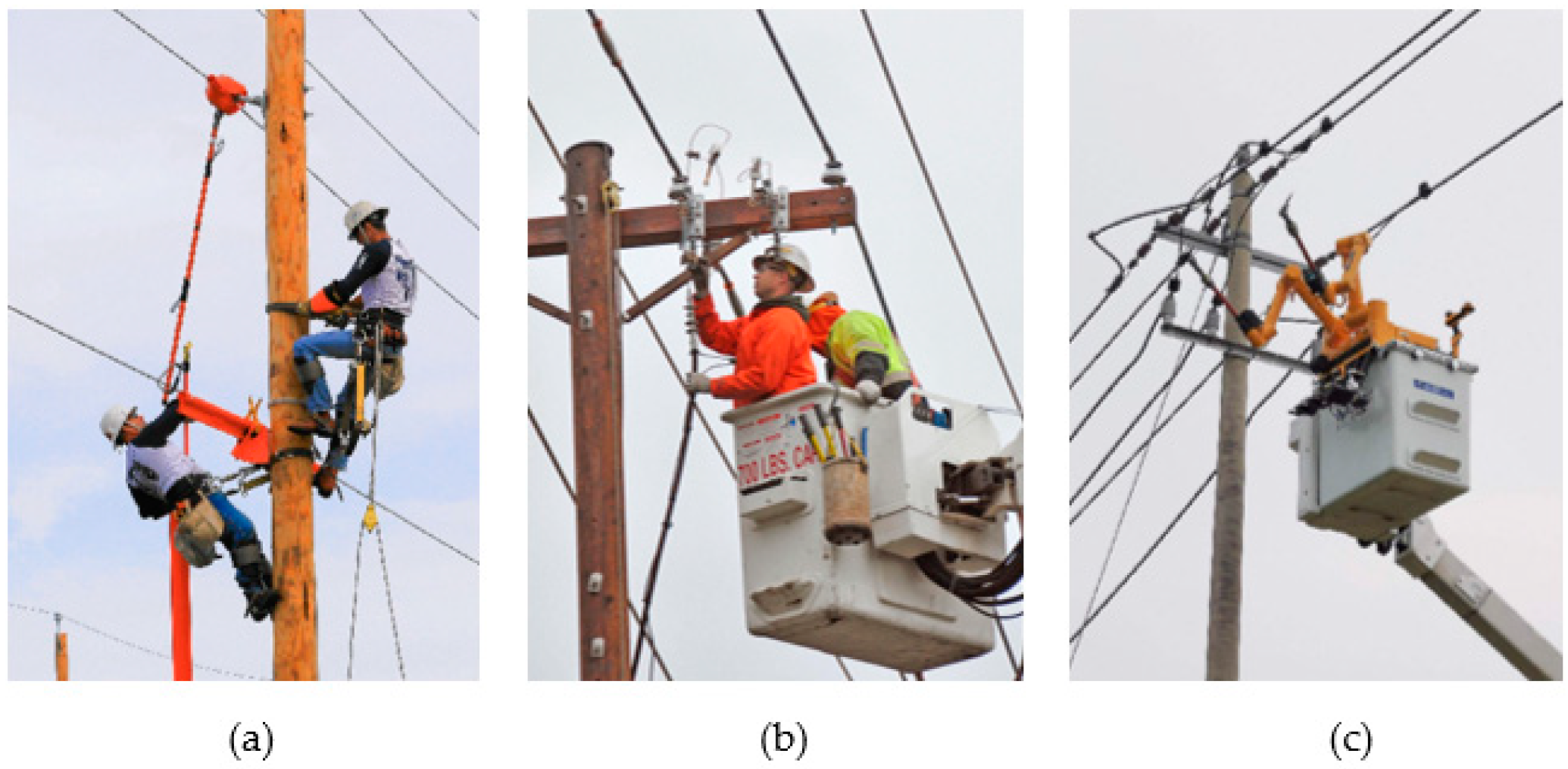
:1. Introduction
2. Demand Analysis
- The live working robot needs to move in a certain space and change position at any time;
- The robot can replace the operator in dangerous environments, such as working at high altitude, close to live equipment;
- Some parts of the live working projects need long-term duty and repetitive work;
- Many live working operations need to be carried out in narrow spaces and complex environments, thus the robots must be light and flexible;
- The robot needs to be highly reliable, and at the same time, it is urgent to reduce cost and improve cost performance;
- The robot must be simple to operate, easy to control, and highly maintainable, to meet the needs of grassroots use.
3. Design
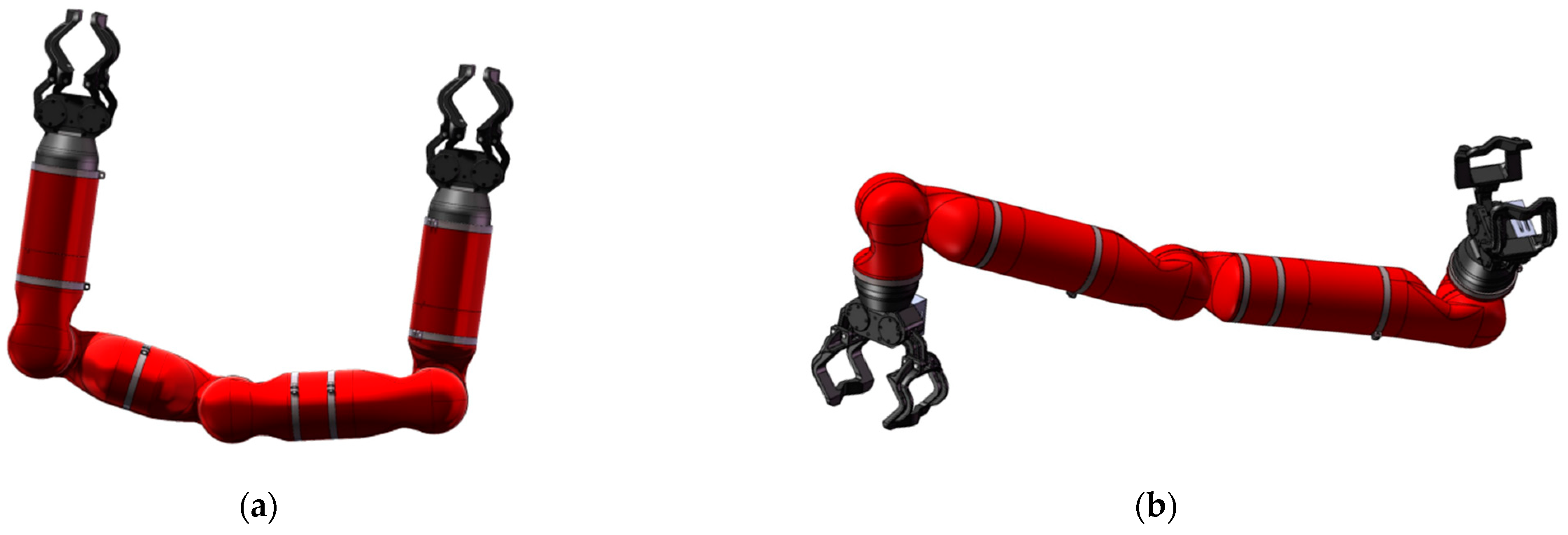
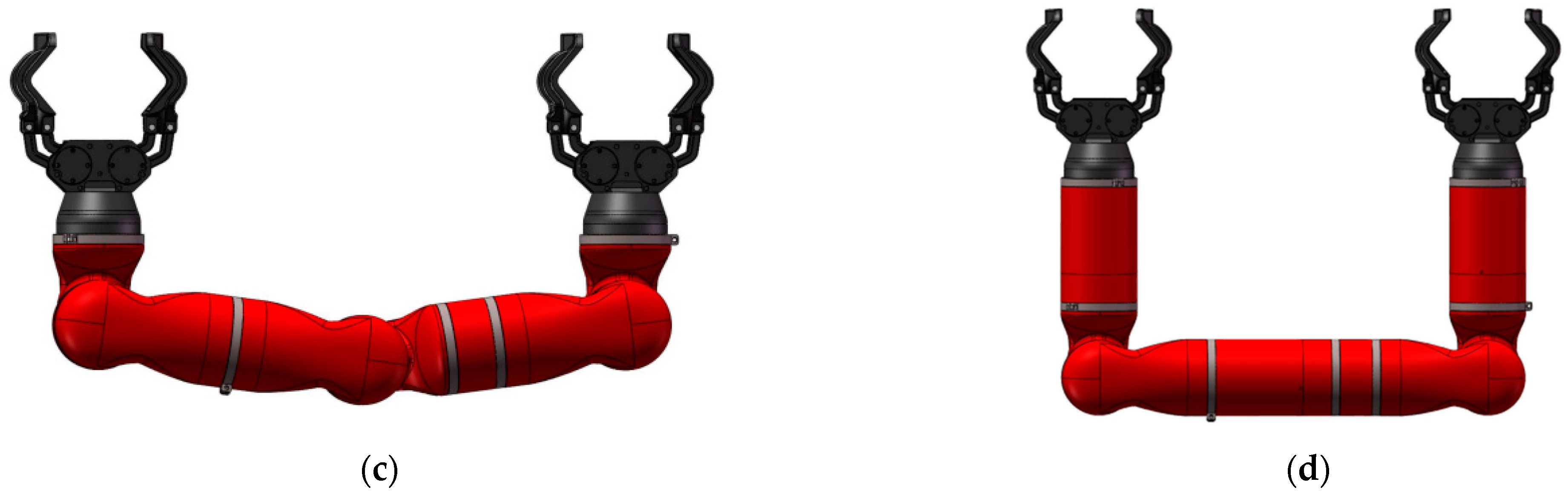
3.1. Mechanical Structure
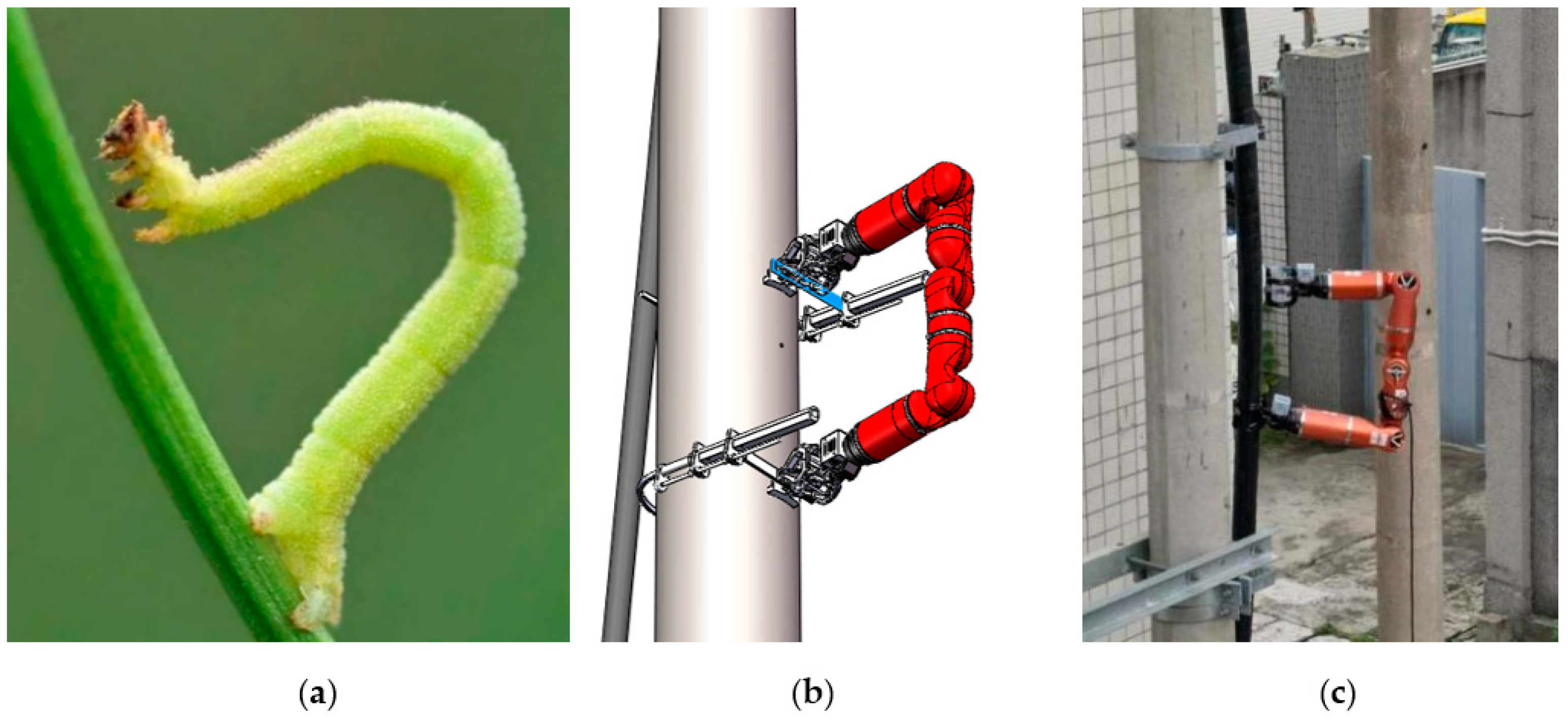
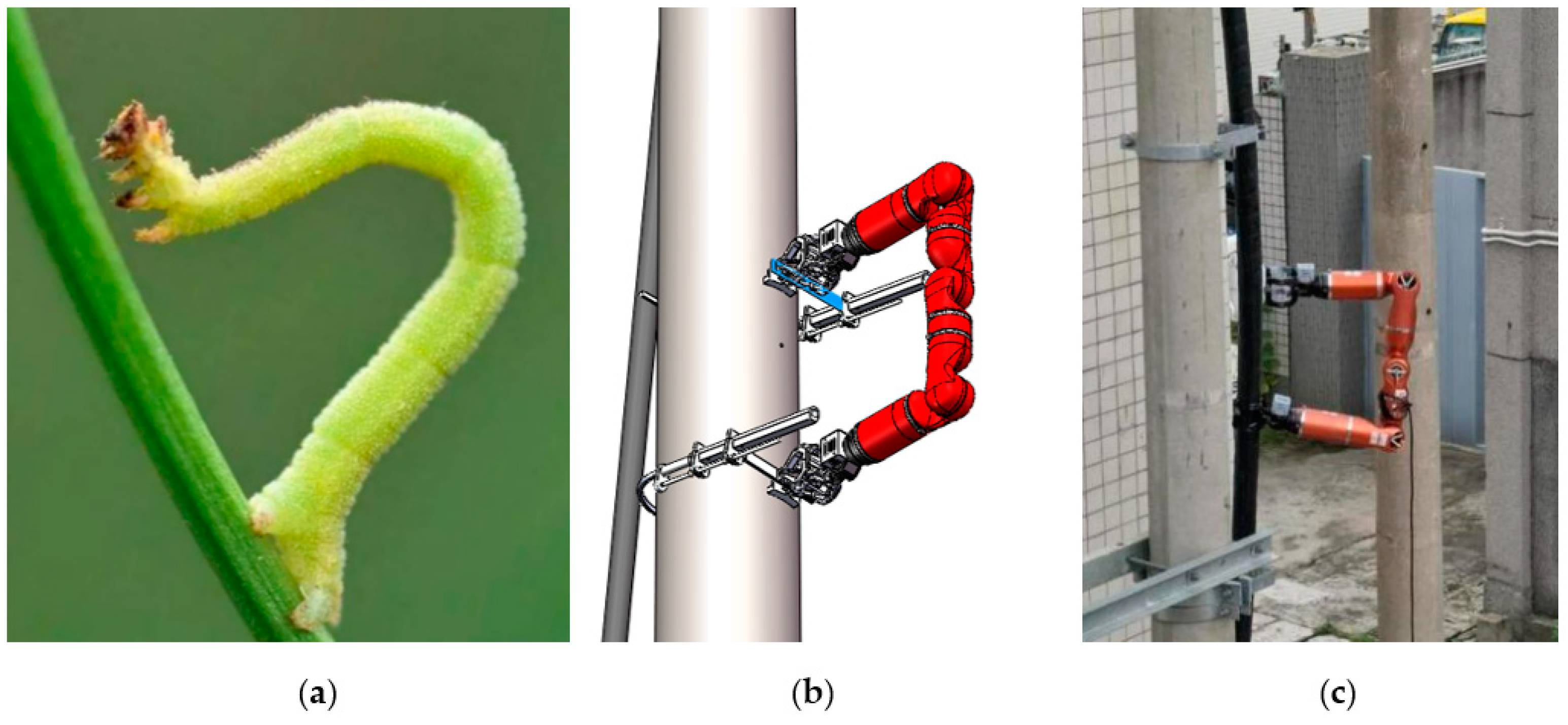
3.2. Biomimetic Body
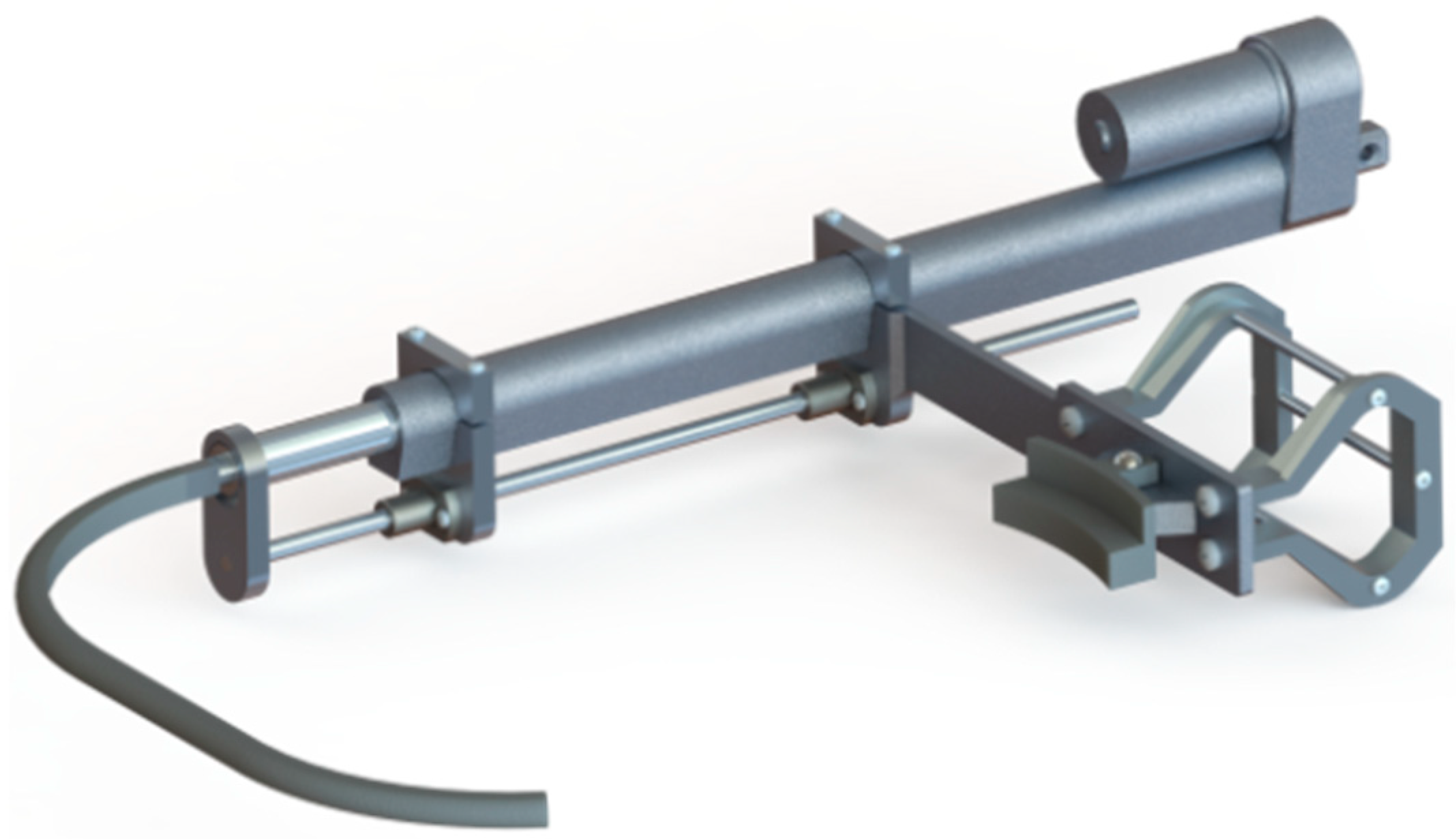
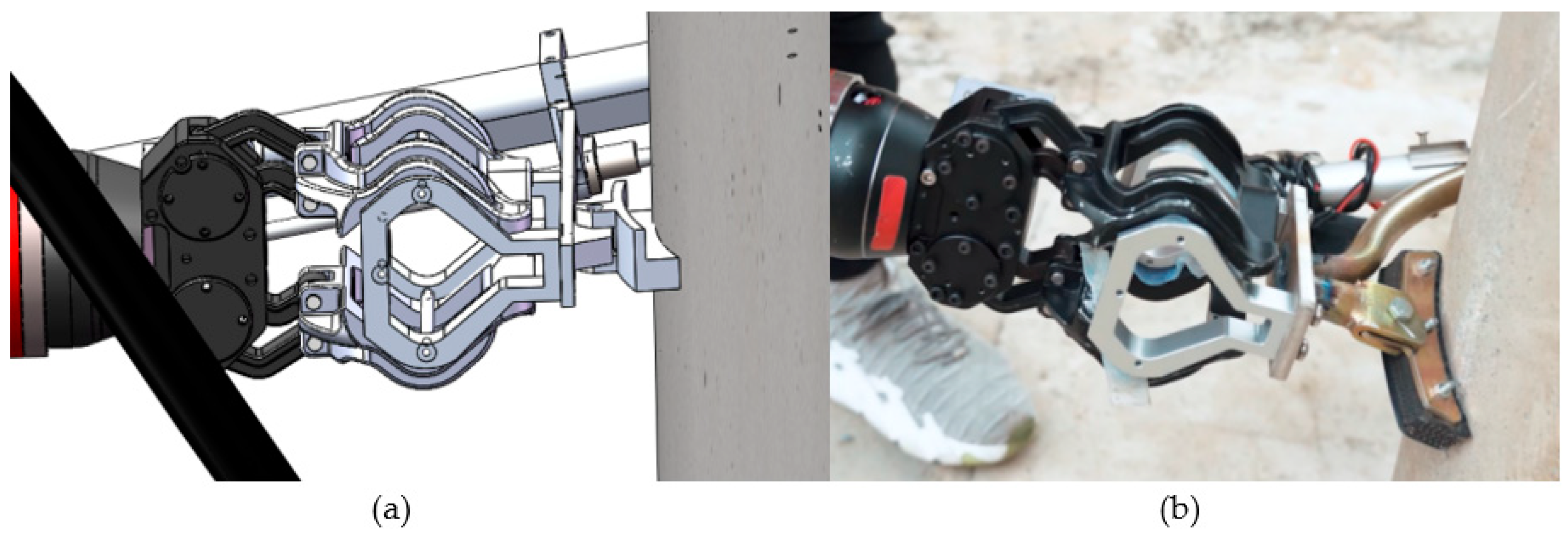
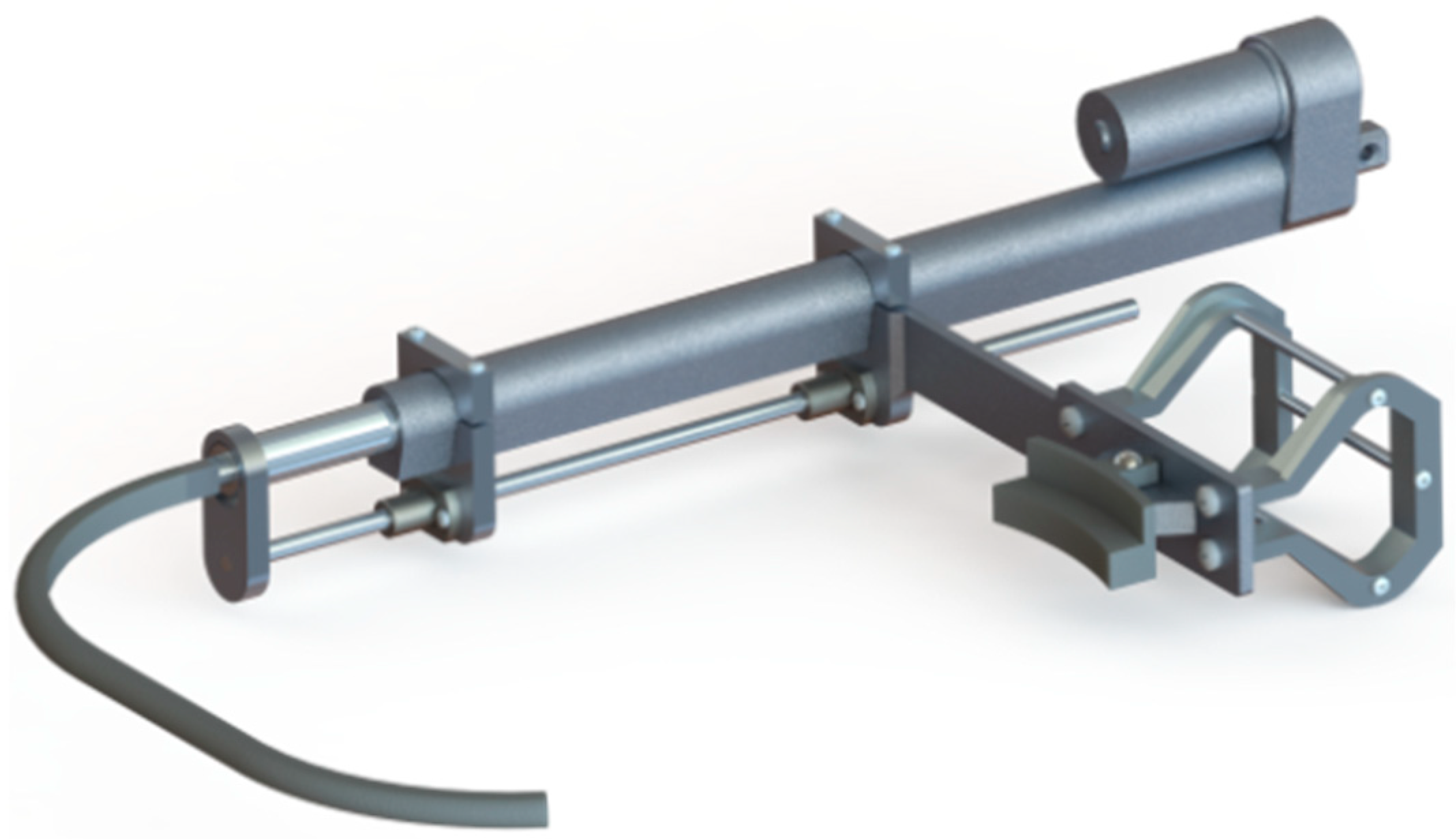
3.3. Pole-Climber
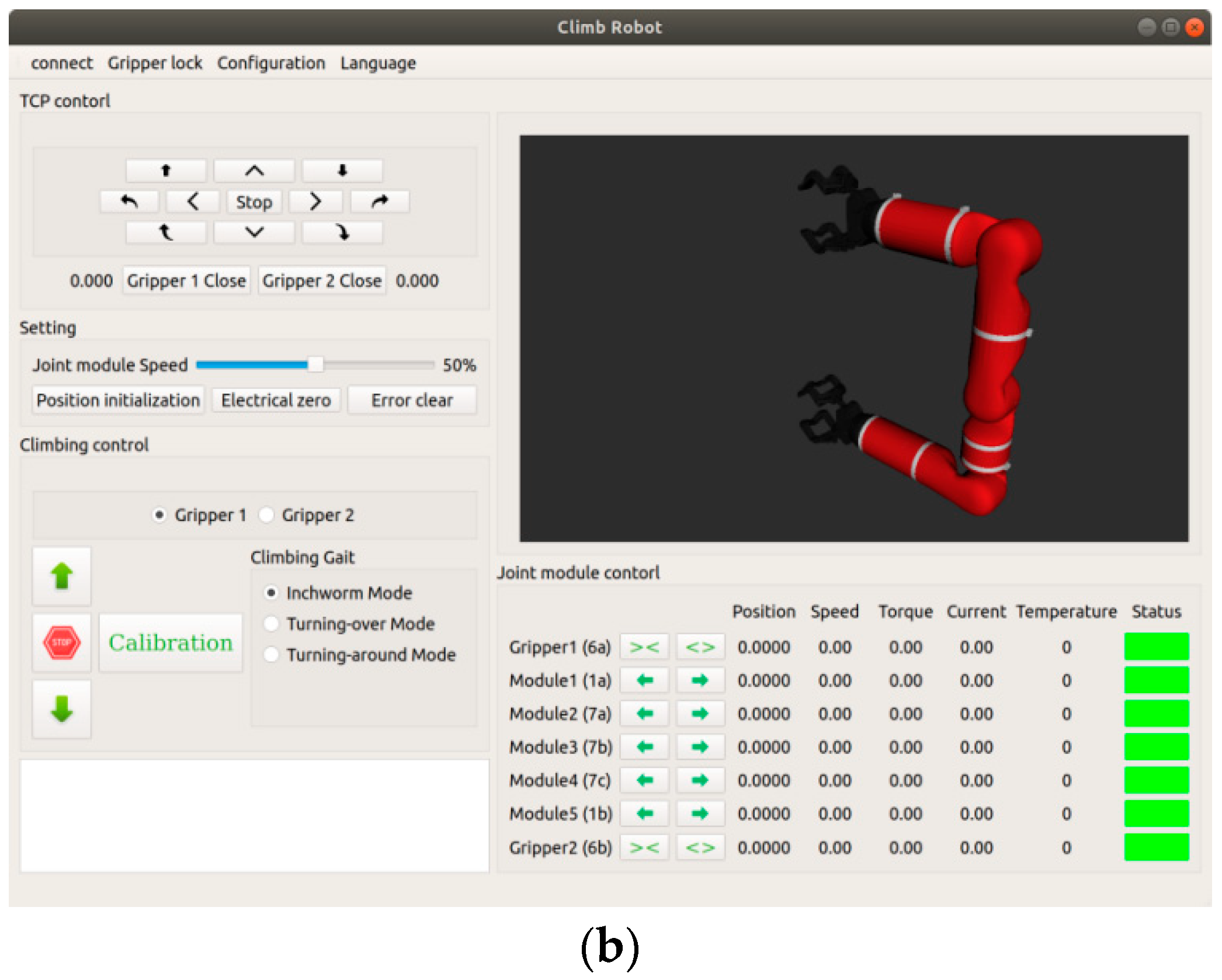
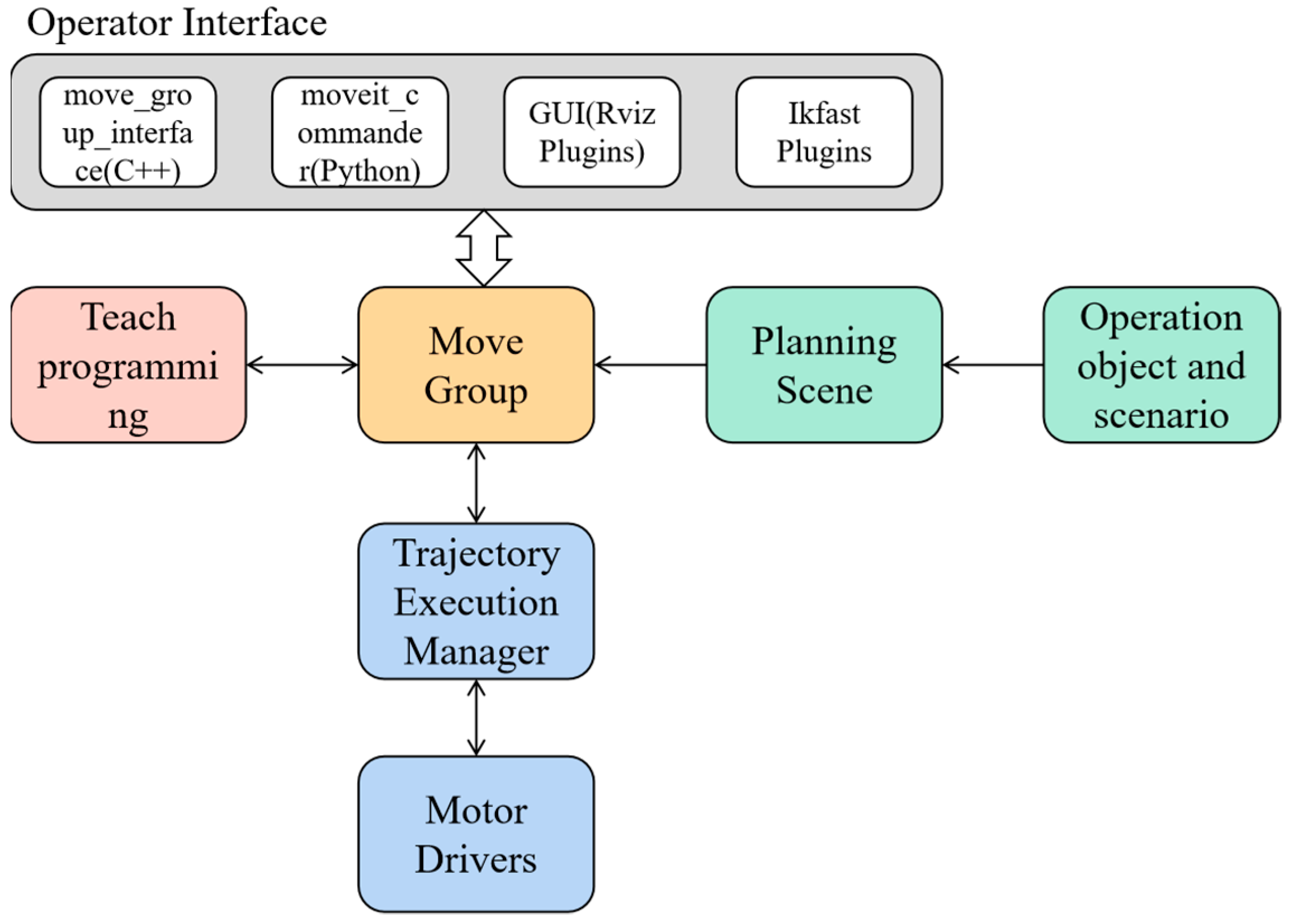
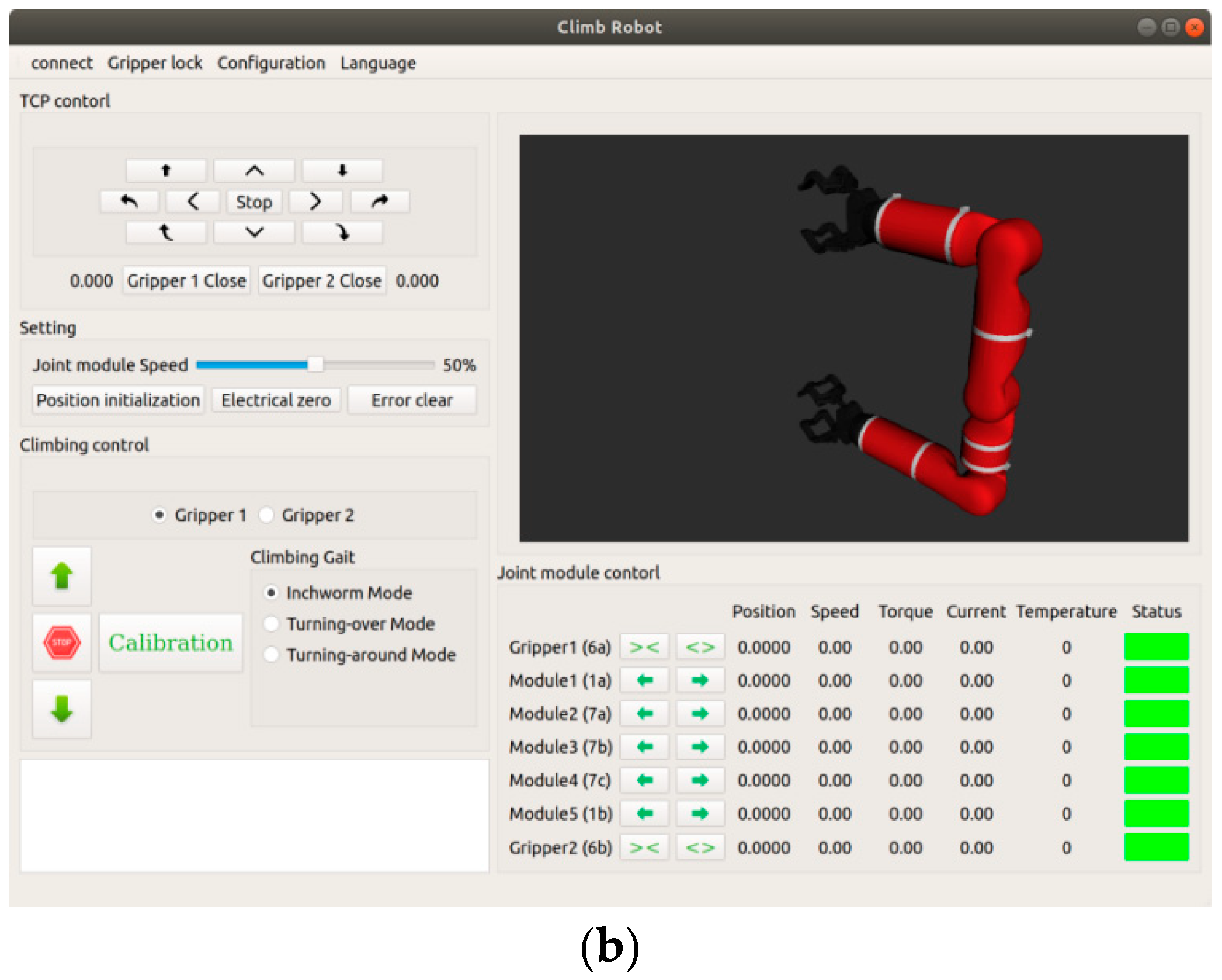
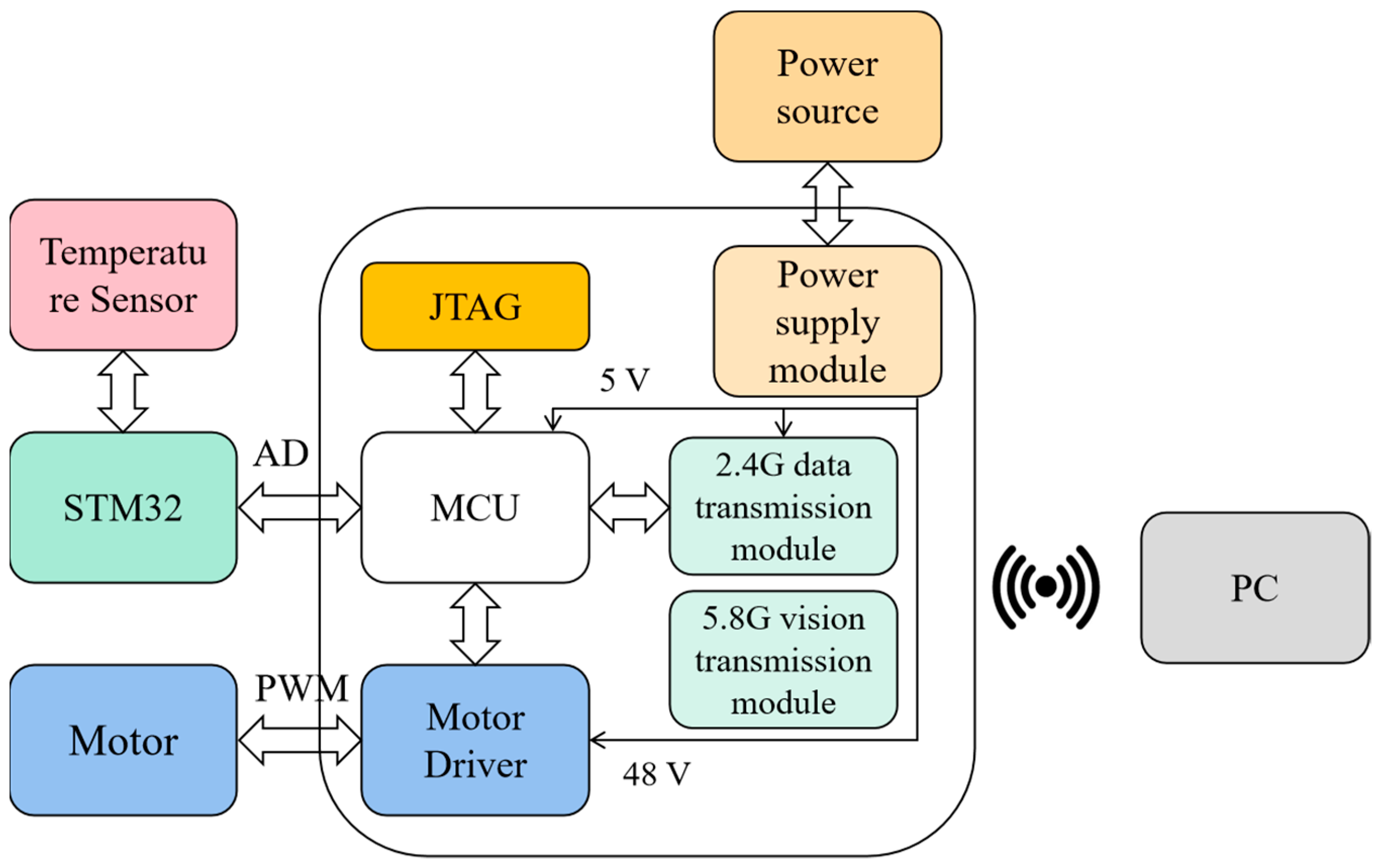
3.4. Electrical and Control System
4. Climb Pole
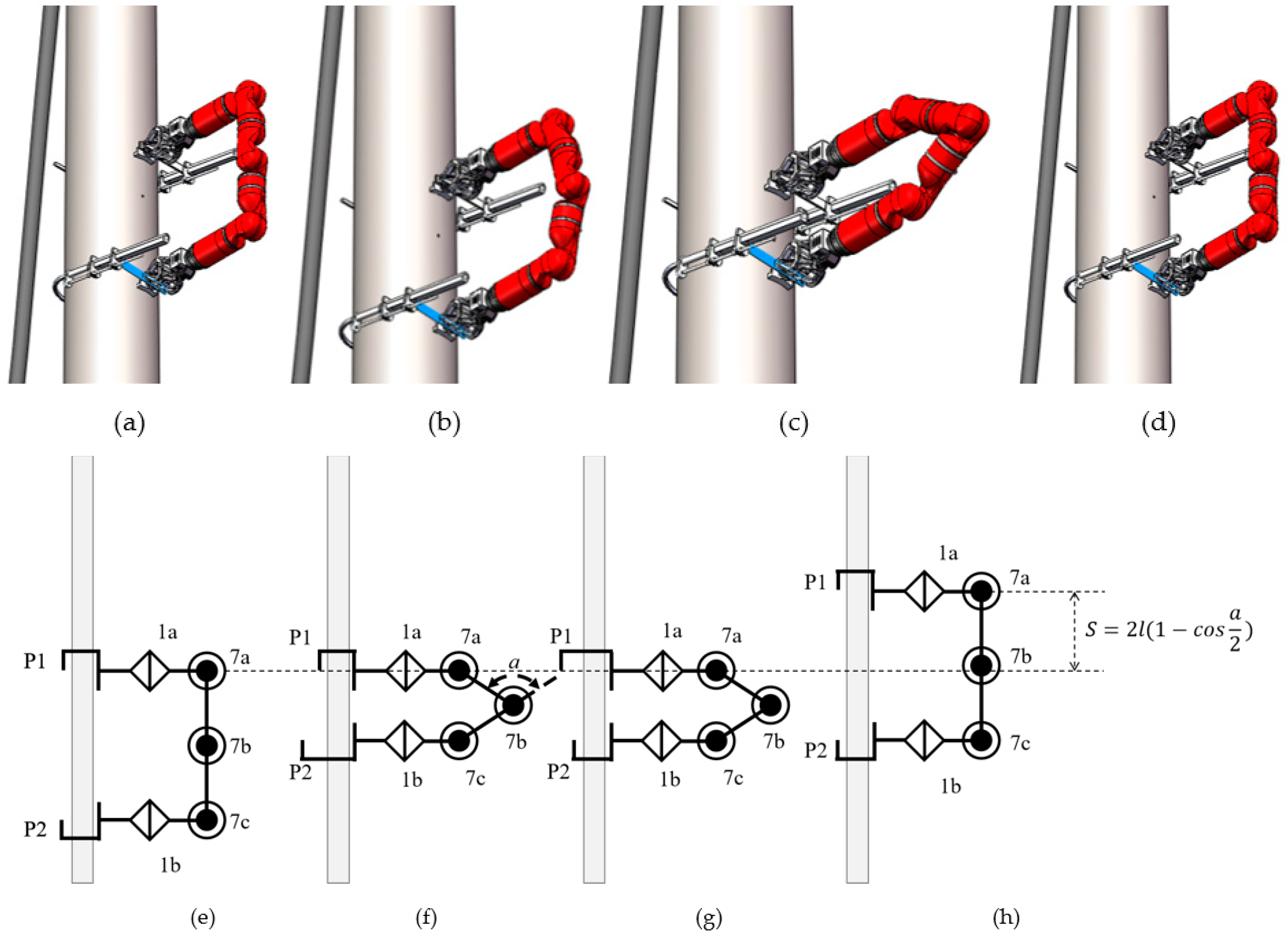
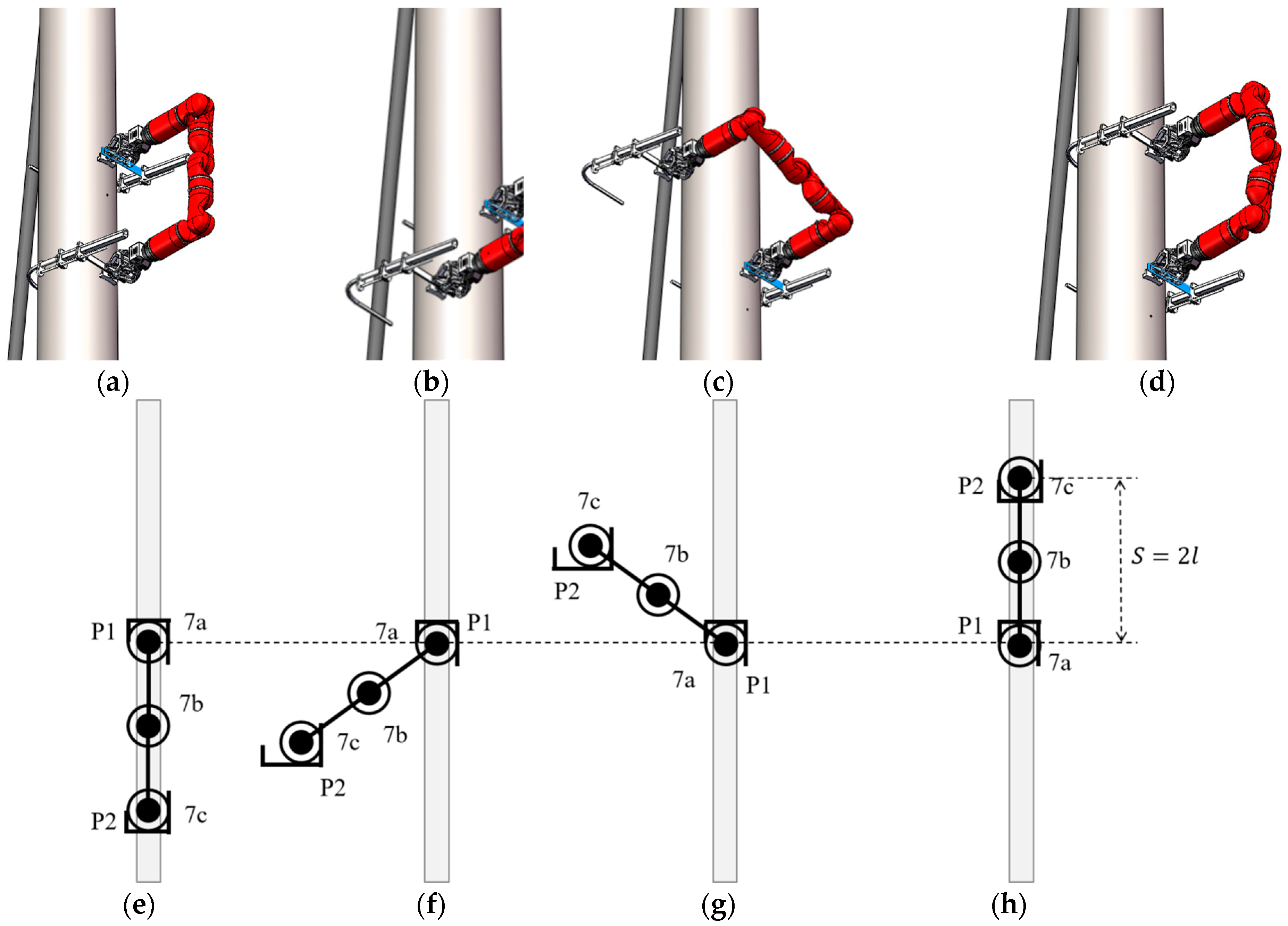
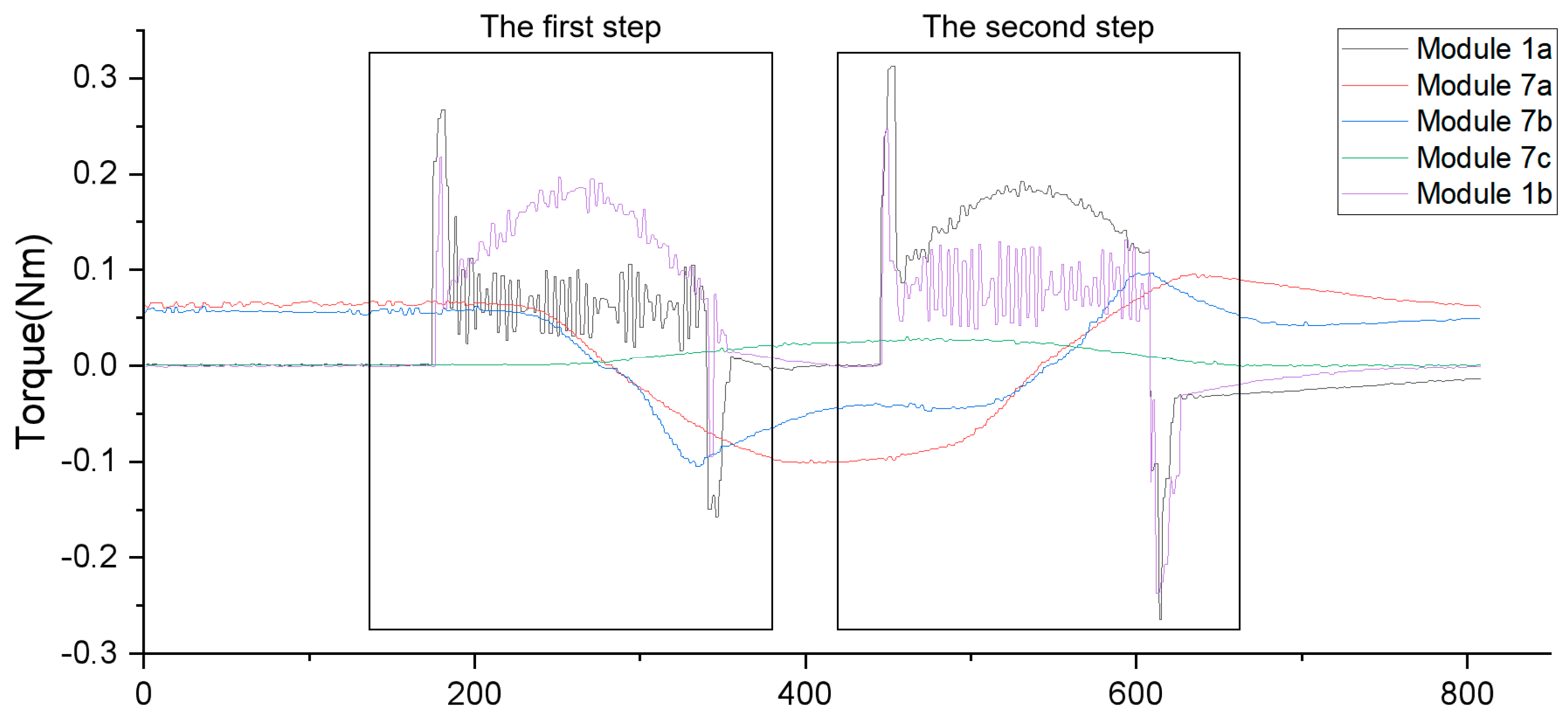
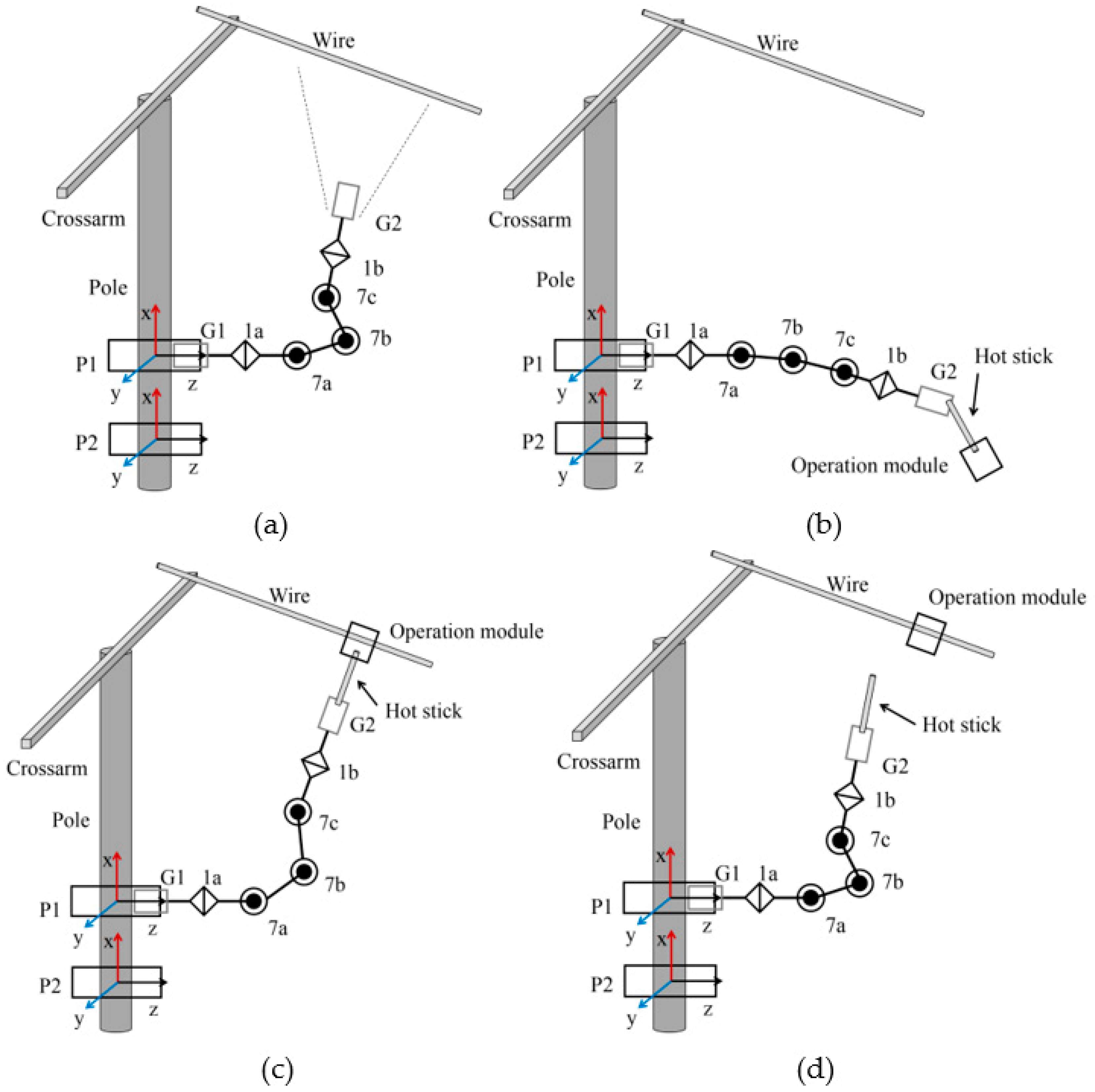
4.1. Inchworm Gait
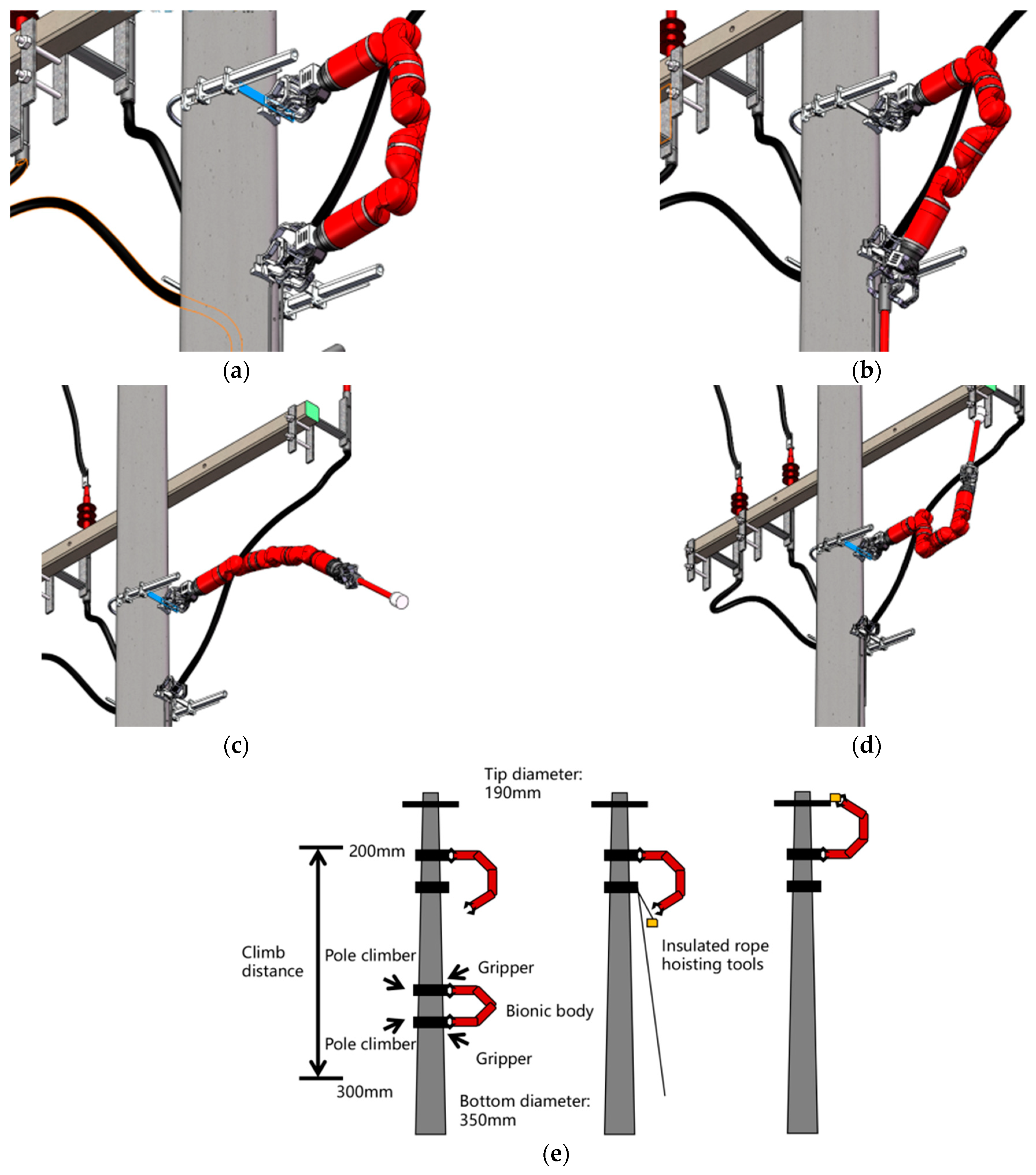
- Release the pole-climber (P2) and the robot is supported only by the other pole-climber (P1) which grasps the pole firmly, the robot rotates three 7-type modules to move the released pole-climber (P2) to a higher target position on the pole (refer to Figure 10a,b,e,f);
- The pole-climber P2 is closed to grasp the pole firmly, and pole-climber P1 is released (see Figure 10c,g);
- Supported only by the new fulcrum fixed by pole-climber P2, the robot rotates three 7-type modules so that P1 moves towards a new target position on the pole (see Figure 10d,h);
- Pole-climber P1 firmly grasps the pole so that P1 can support the robot;
- Repeat the above steps.
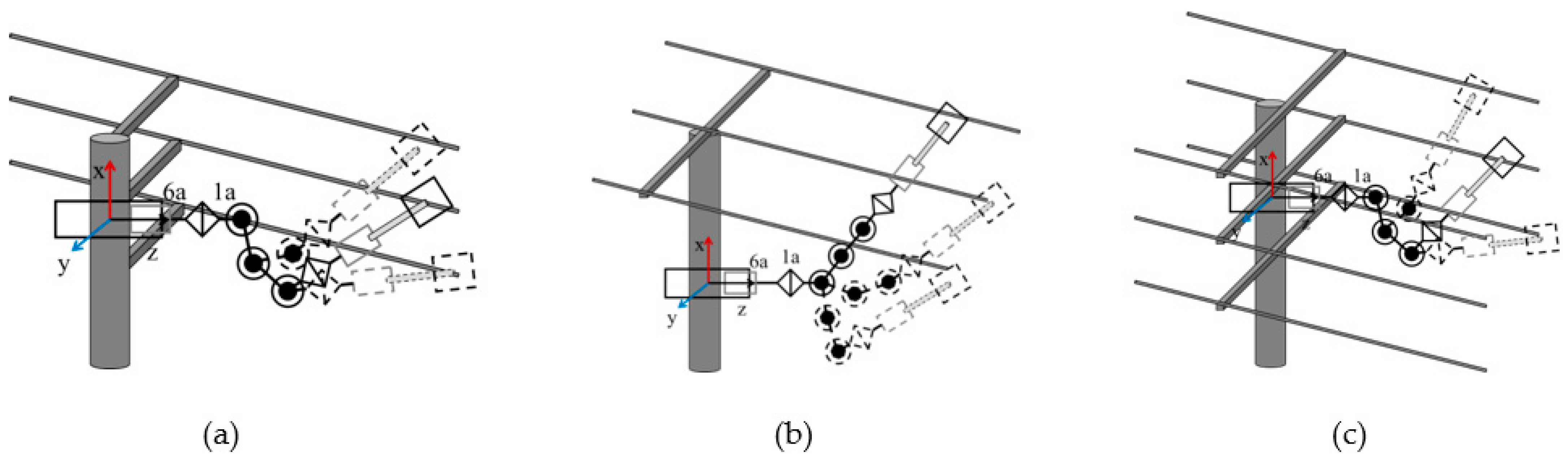
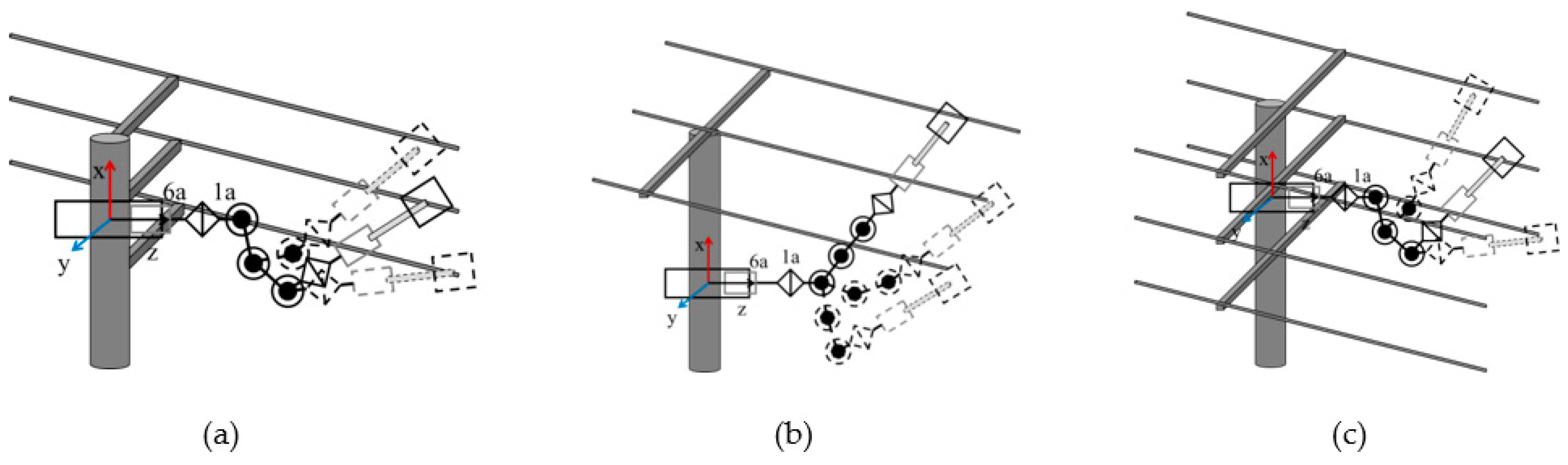
4.2. Turning-Around Gait
- Release the pole-climber (P2) and supported only by the other one (P1) which grasps the pole firmly (Figure 12a,e);
- The robot rotates 1-type (1a) modules to move the pole-climber (P2) away from the pole, and rotates by 180° (Figure 12b,c,f,g);
- The robot rotates 7-type modules to move the swinging pole-climber P2 towards the target position for grasping the pole (Figure 12d,h);
- Pole-climber P2 closes to grasp the pole. Thus, the robot is supported by both grippers.
- Repeat the above steps.
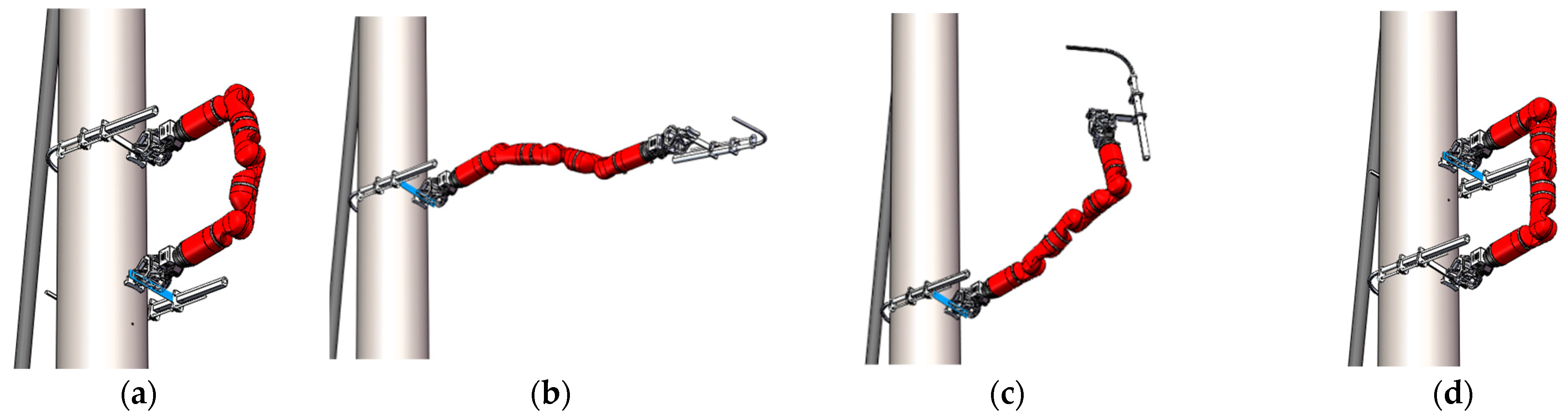
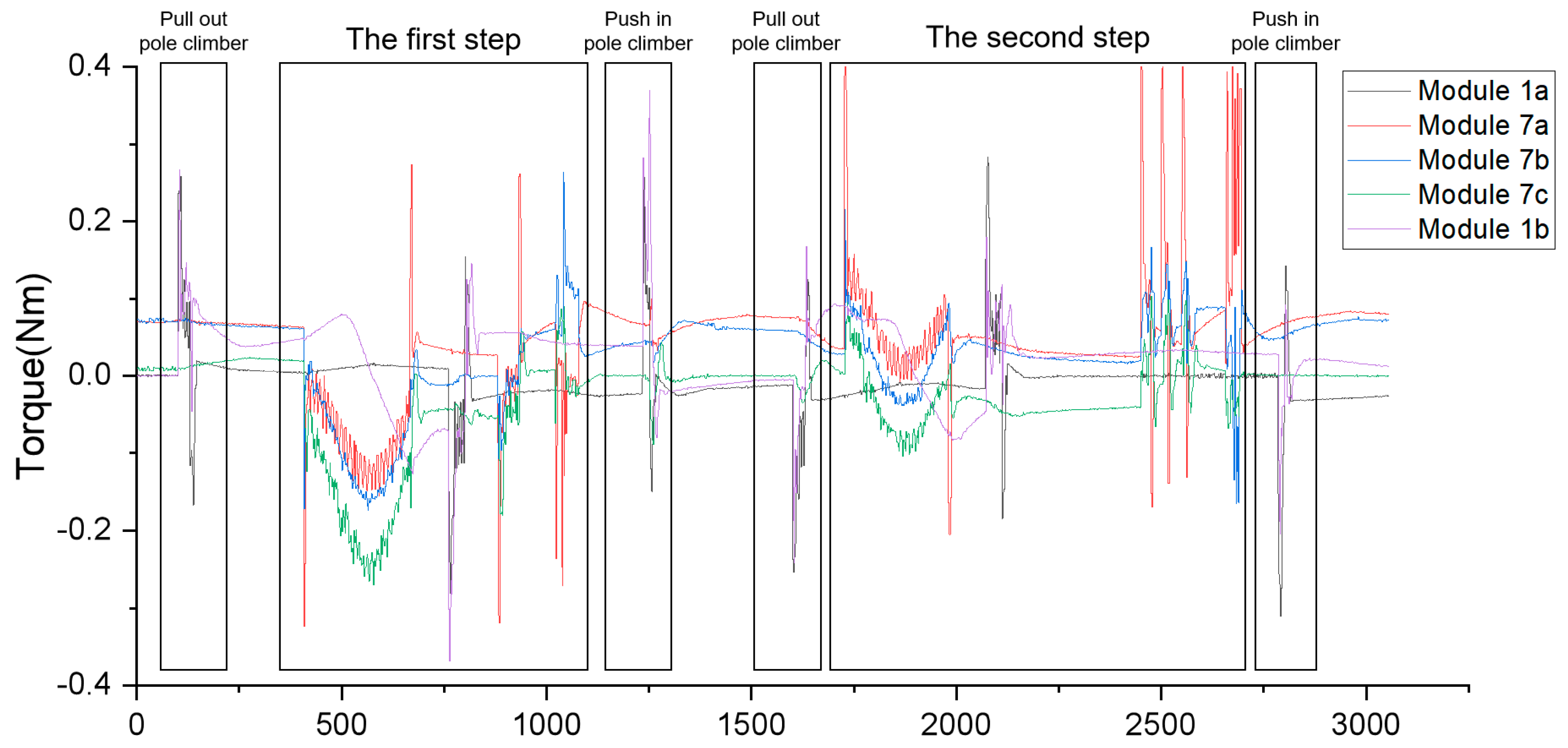
4.3. Turning-Over Gait
- Release the pole-climber (P2) and supported only by the other one (P1) which grasps the pole firmly, the robot rotates 7-type and 1-type modules in order to pull the pole-climber (P2) away from the pole (Figure 14b,f);
- The robot continues to rotate 7-type modules. As a result, the whole robot turns over (Figure 14b,c,e,f);
- The robot continues to rotate 7-type and 1-type modules to push the swinging pole-climber P2 to the target position on the pole for grasping (Figure 14d,h);
- The pole-climber P2 closes to grasp the pole, thus the robot is supported by both pole-climbers.
- Repeat the above steps.
4.4. Overcoming Obstacles
4.5. Gait Comparison
4.6. Safety Analysis
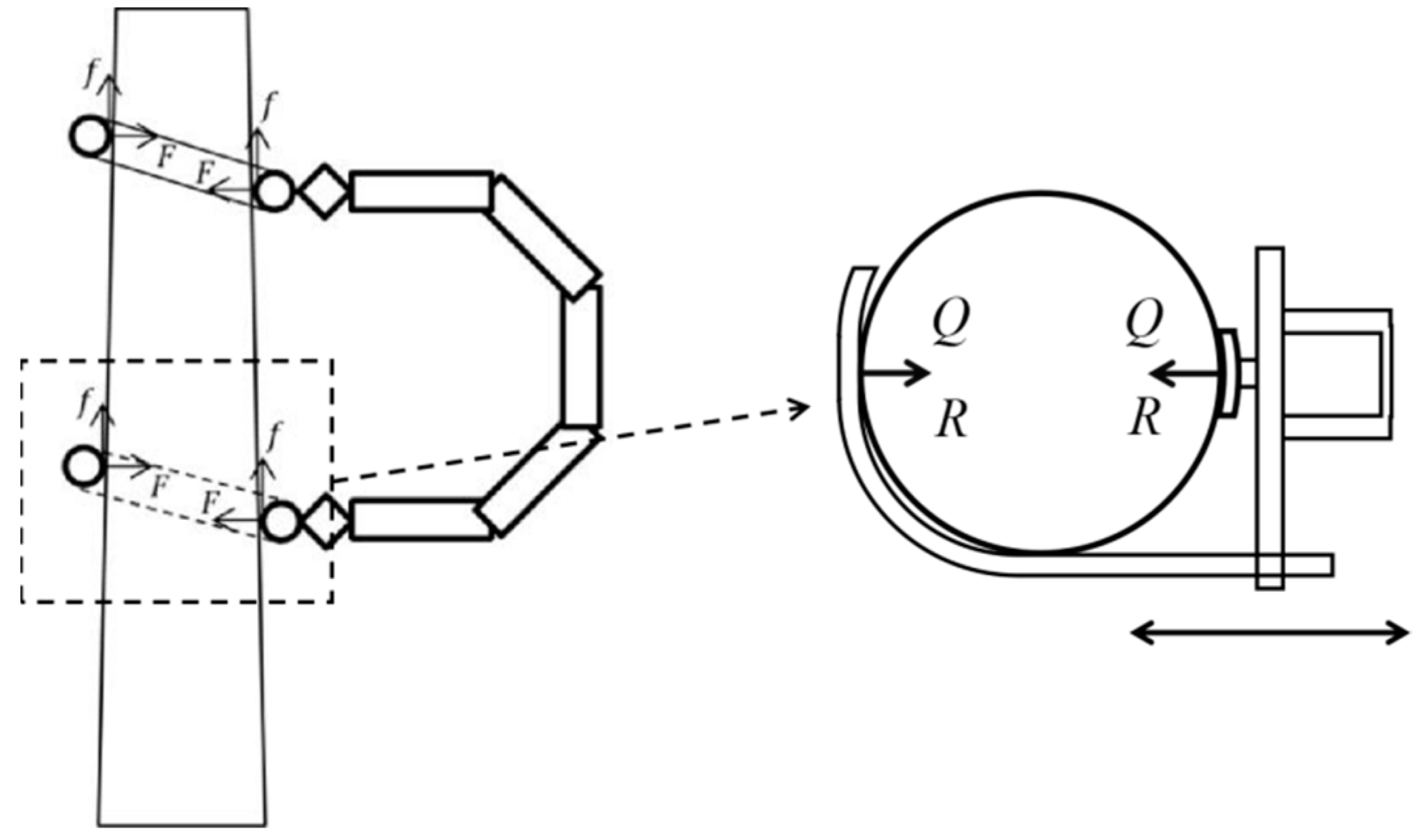
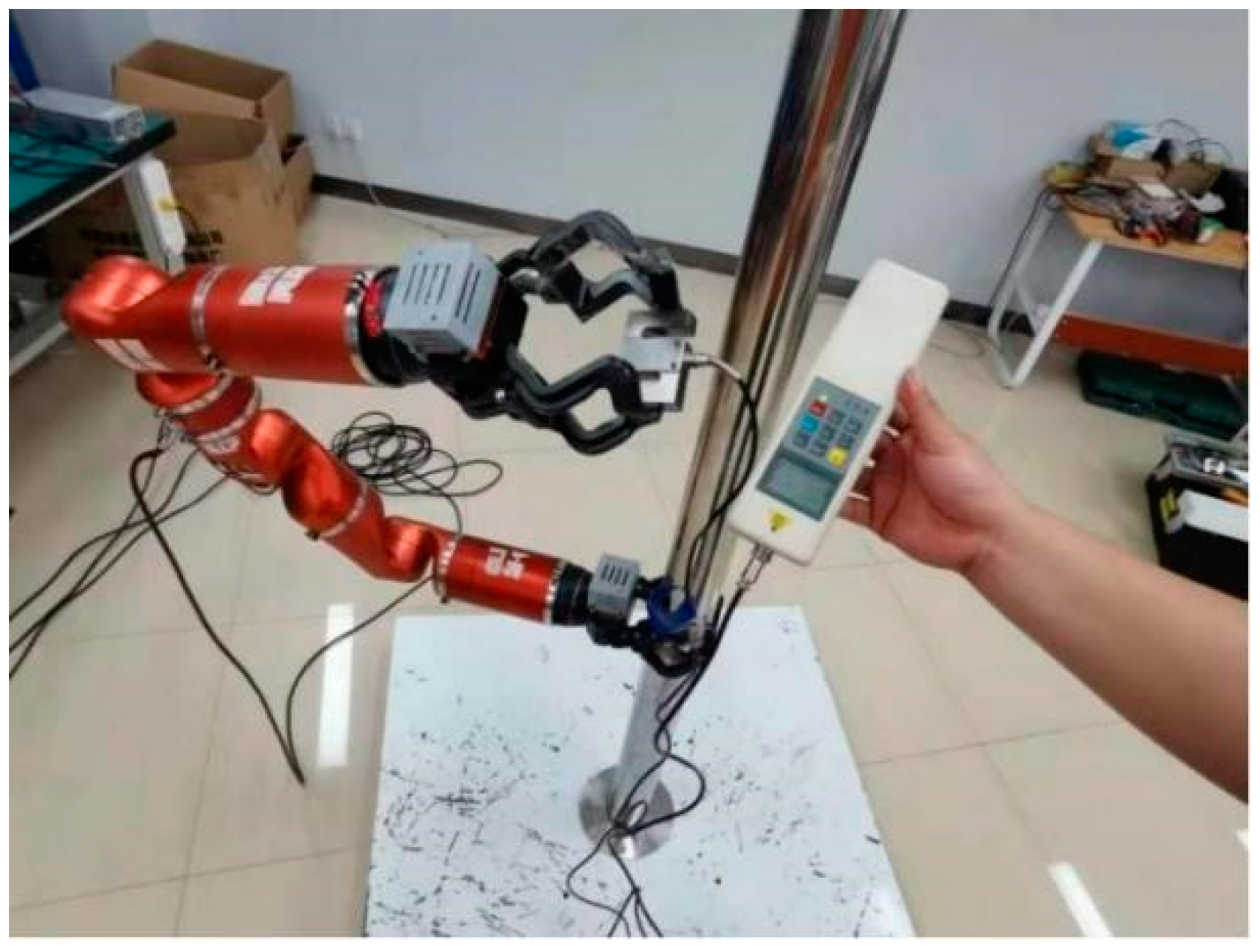
4.6.1. Grasping Force Analysis
4.6.2. Self-Locking Performance Analysis
5. Operation
5.1. Operation Process
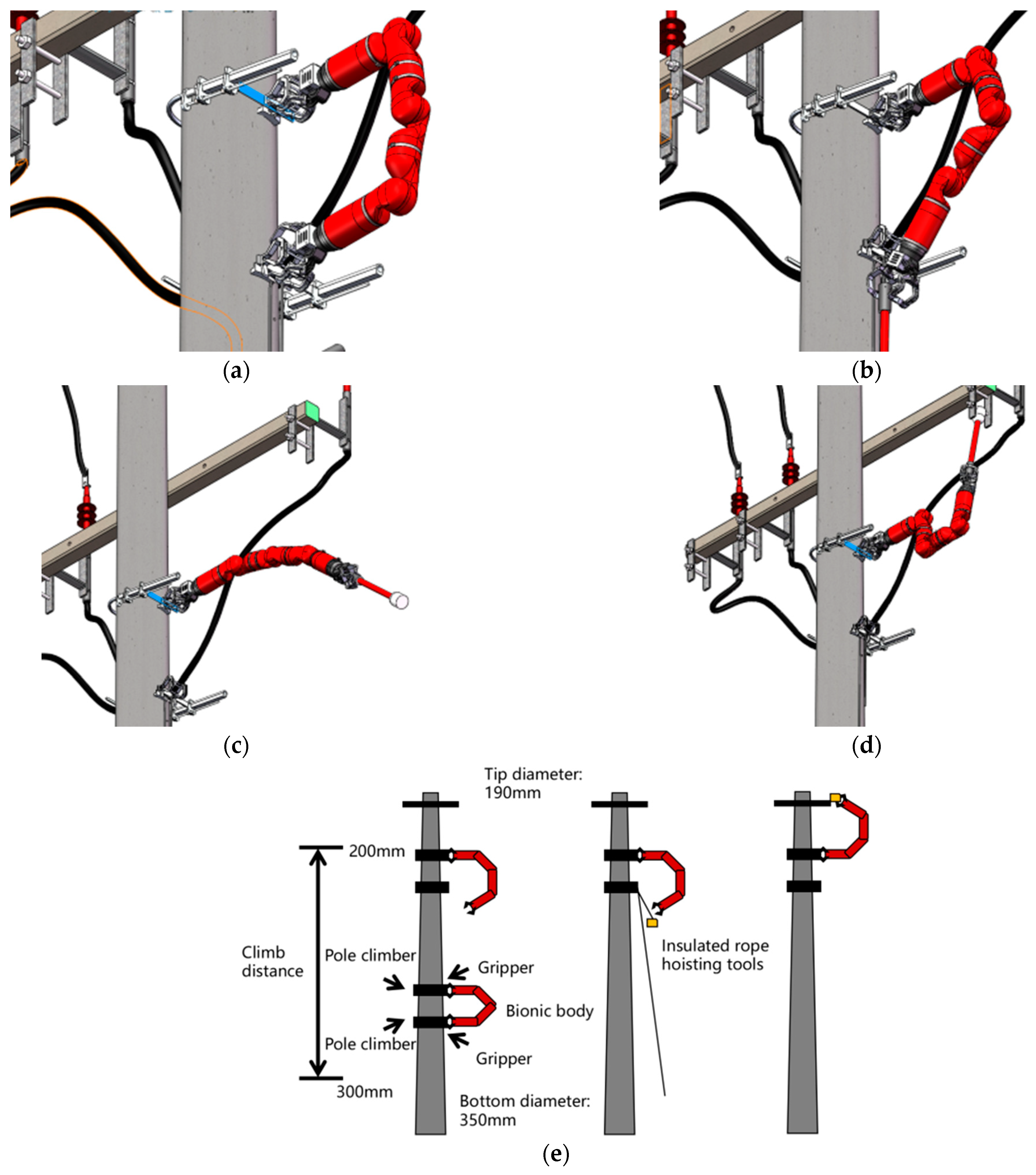
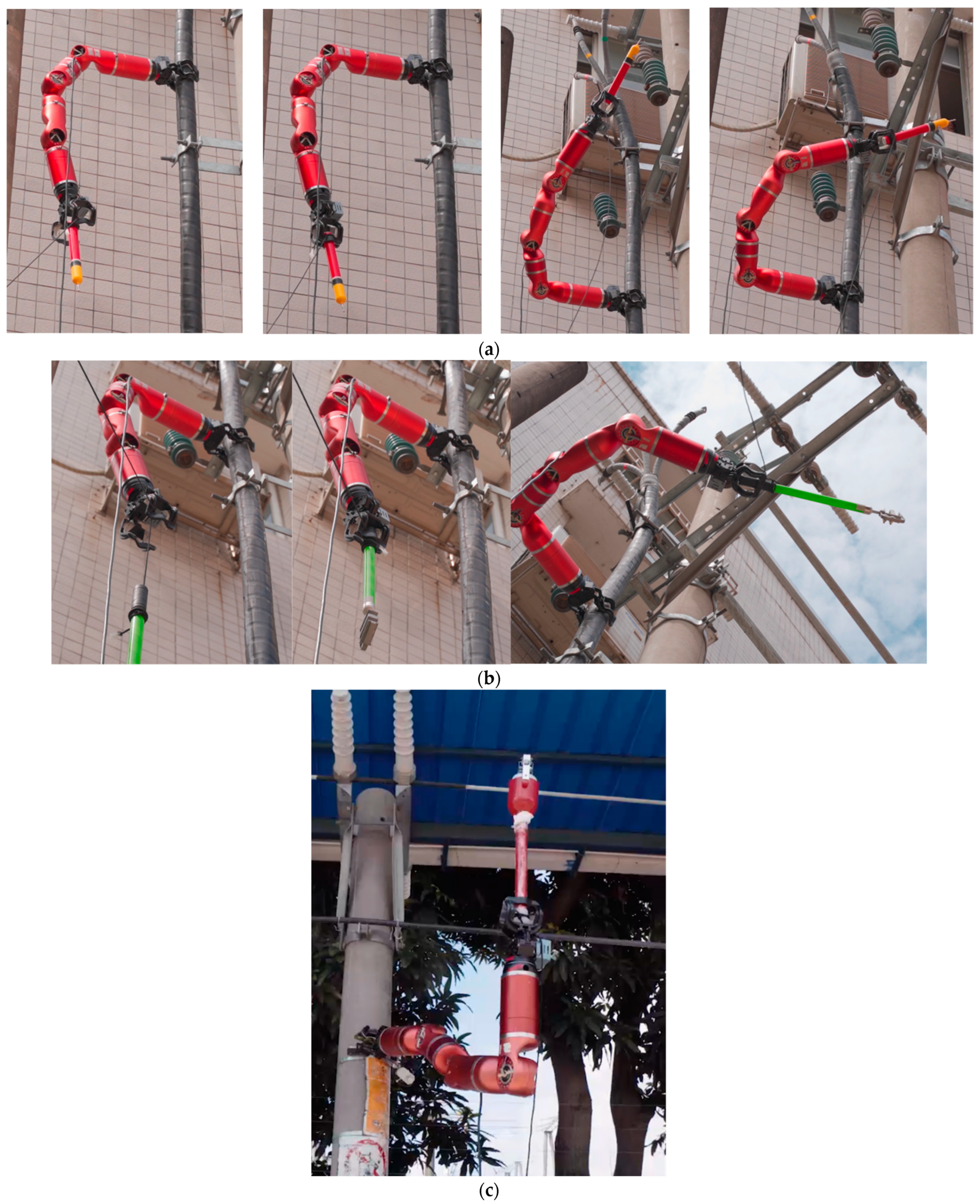
- The robot grasps the pole from a height close to the ground through the pole-climber, and climbs up alternately with both pole-climbers, as shown in Figure 20a. During the process of climbing the pole, the mechanical arm climbs up alternately, which is automatically controlled by the program.
- According to the characteristics of the device on the pole, it can use different gaits to overcome different kinds of obstacles.
- When the robot reaches the position near the operation objects, the small gripper below is released and grabs the lifting tool downward, while the pole-climber remains in its original position, as shown in Figure 20b.
- The robot enters the working position upward through valving or side rotation, as shown in Figure 20c.
- At this time, the operator controls the robot’s action posture through the rocker to start the operation, as shown in Figure 20d.
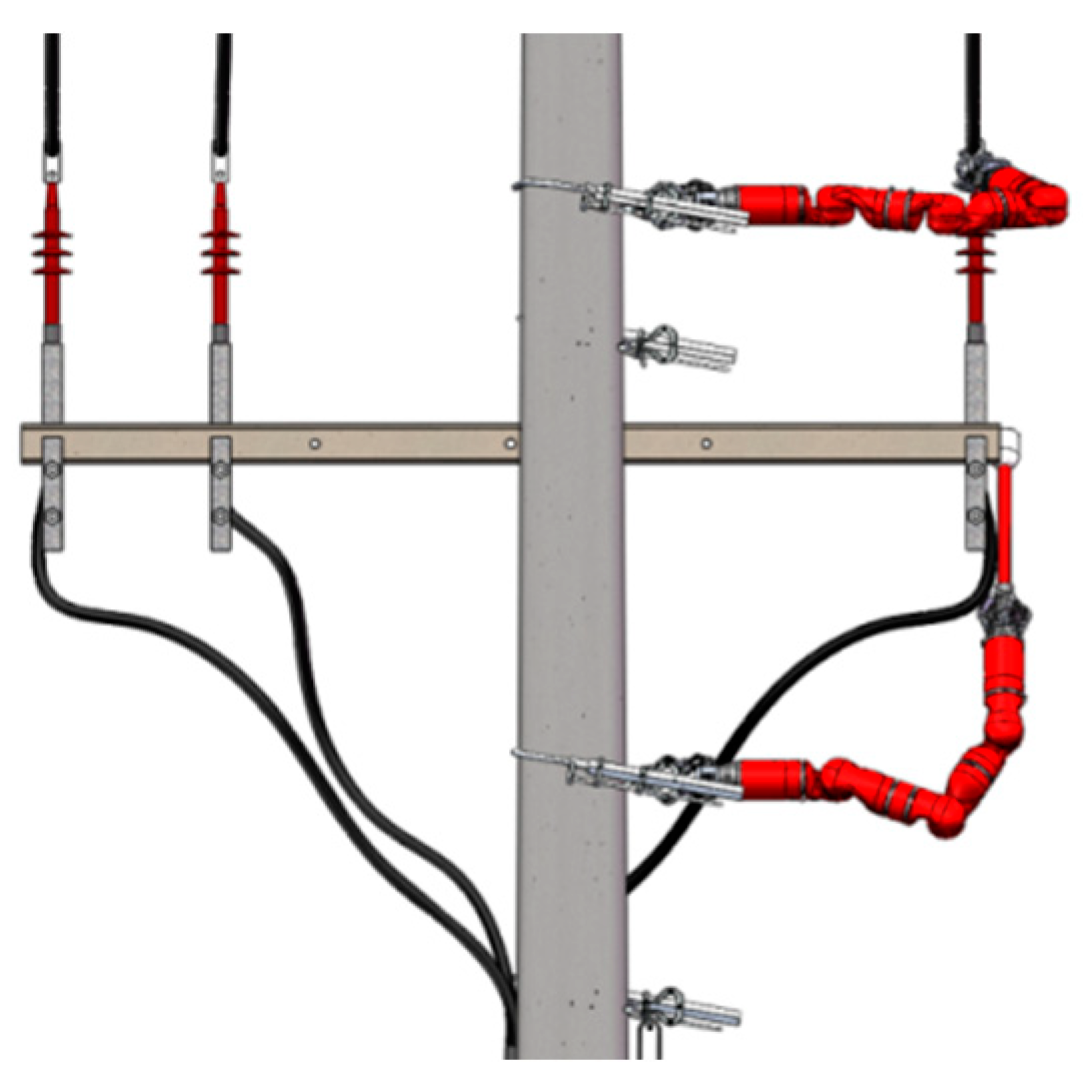
5.2. Operation Position
- Horizontal arrangement
- Triangle and vertically arrangement
- Multi-circuit line on the same pole
5.3. Operation Project
- Verification of live parts and grounding
- Elimination of defects and obstacles
- Install fault indicator
- Equipment monitoring
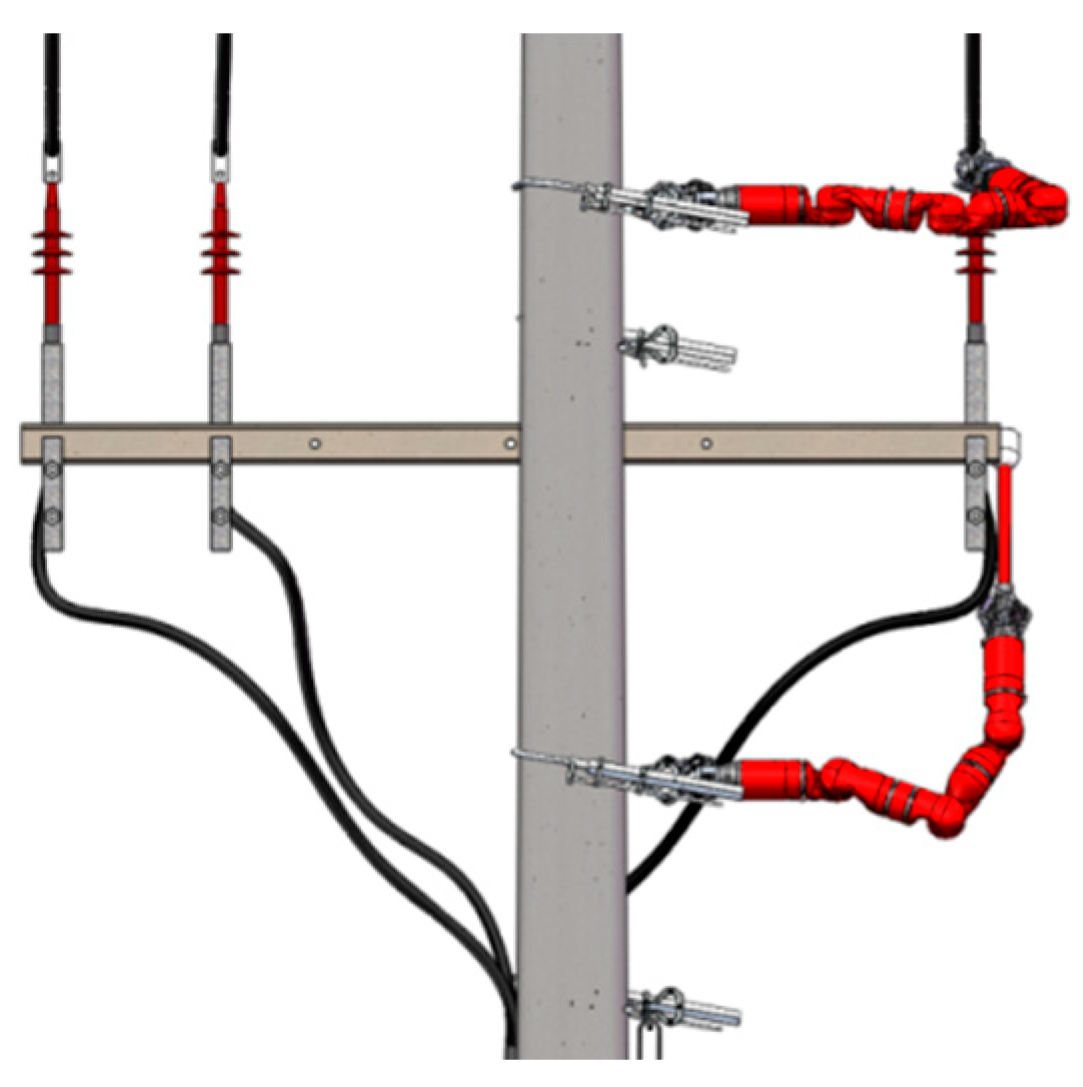
- Install and remove equipment leads or jumpers
- Replace the arrester
6. Technical Characteristics
7. Simulation, Tests and Results
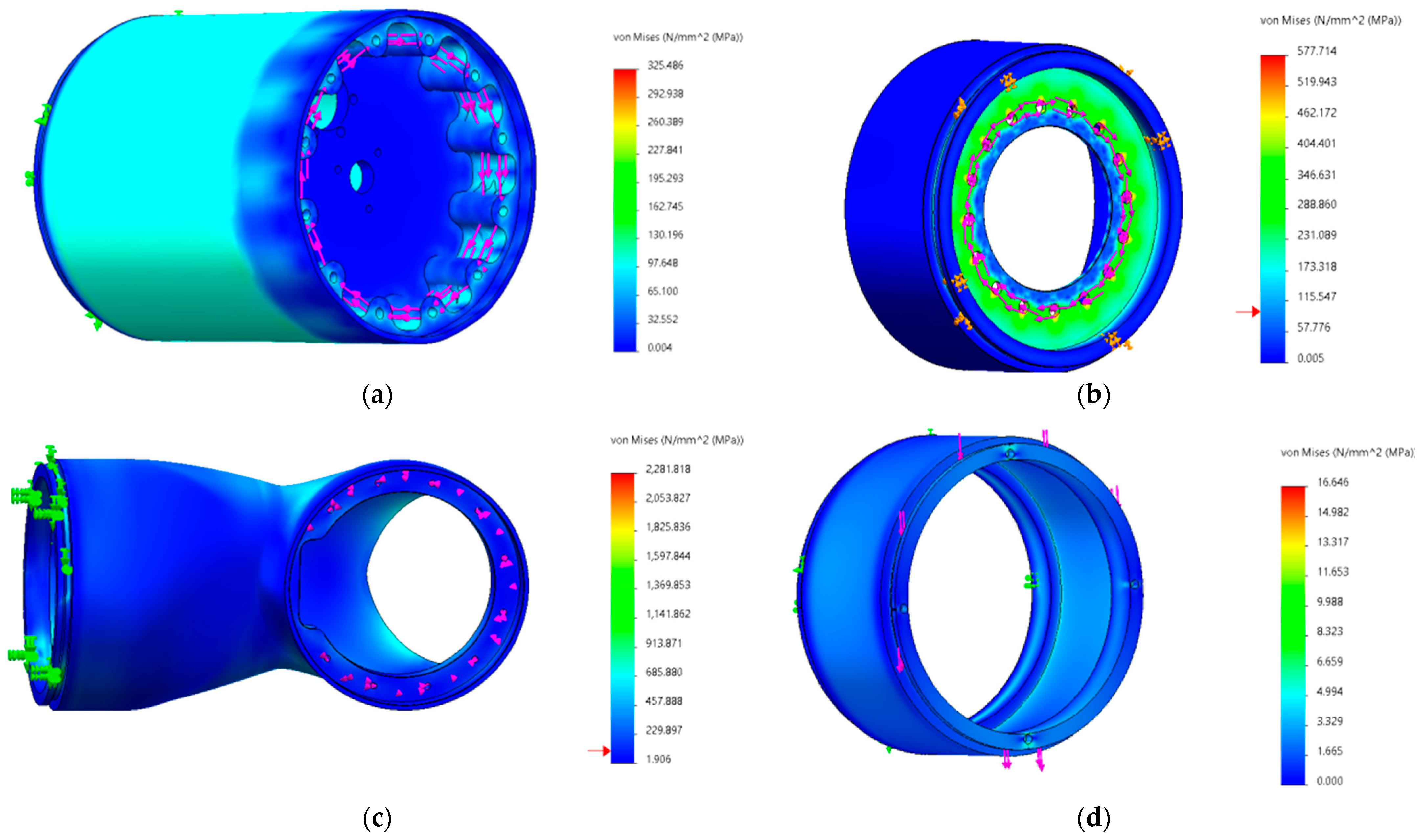
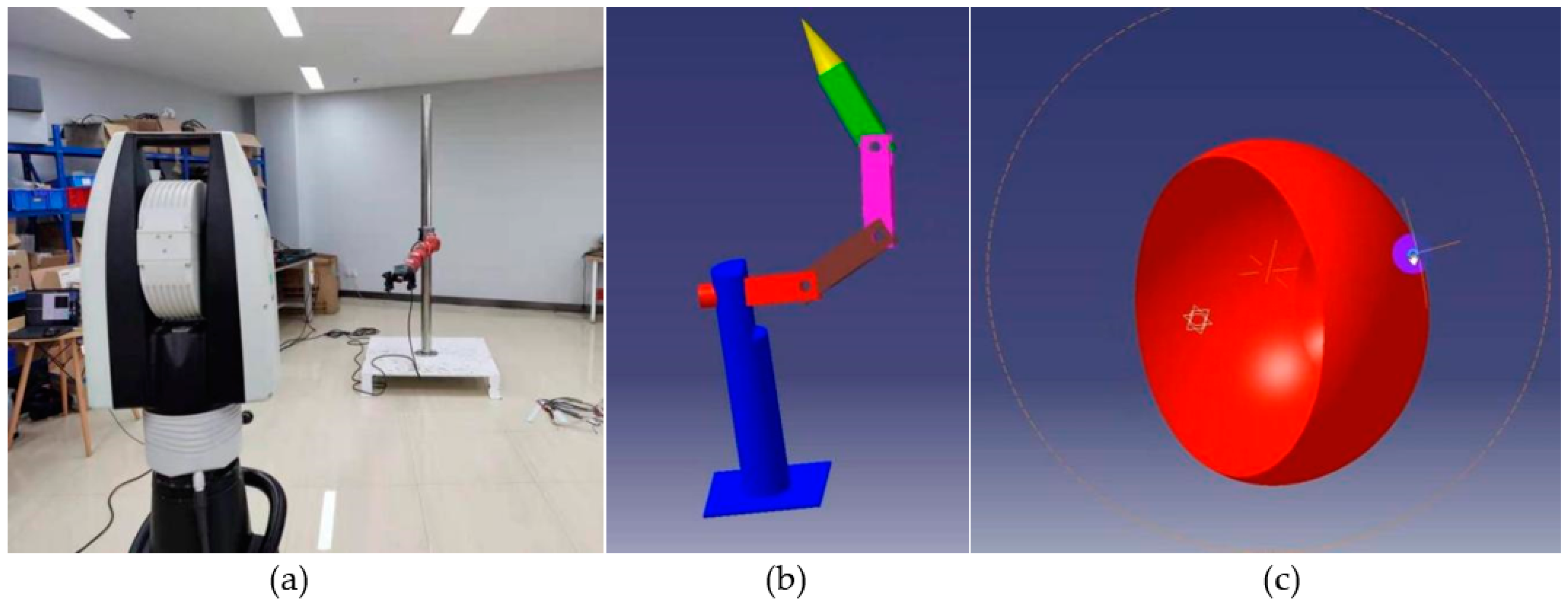
7.1. Robot Structure Simulation
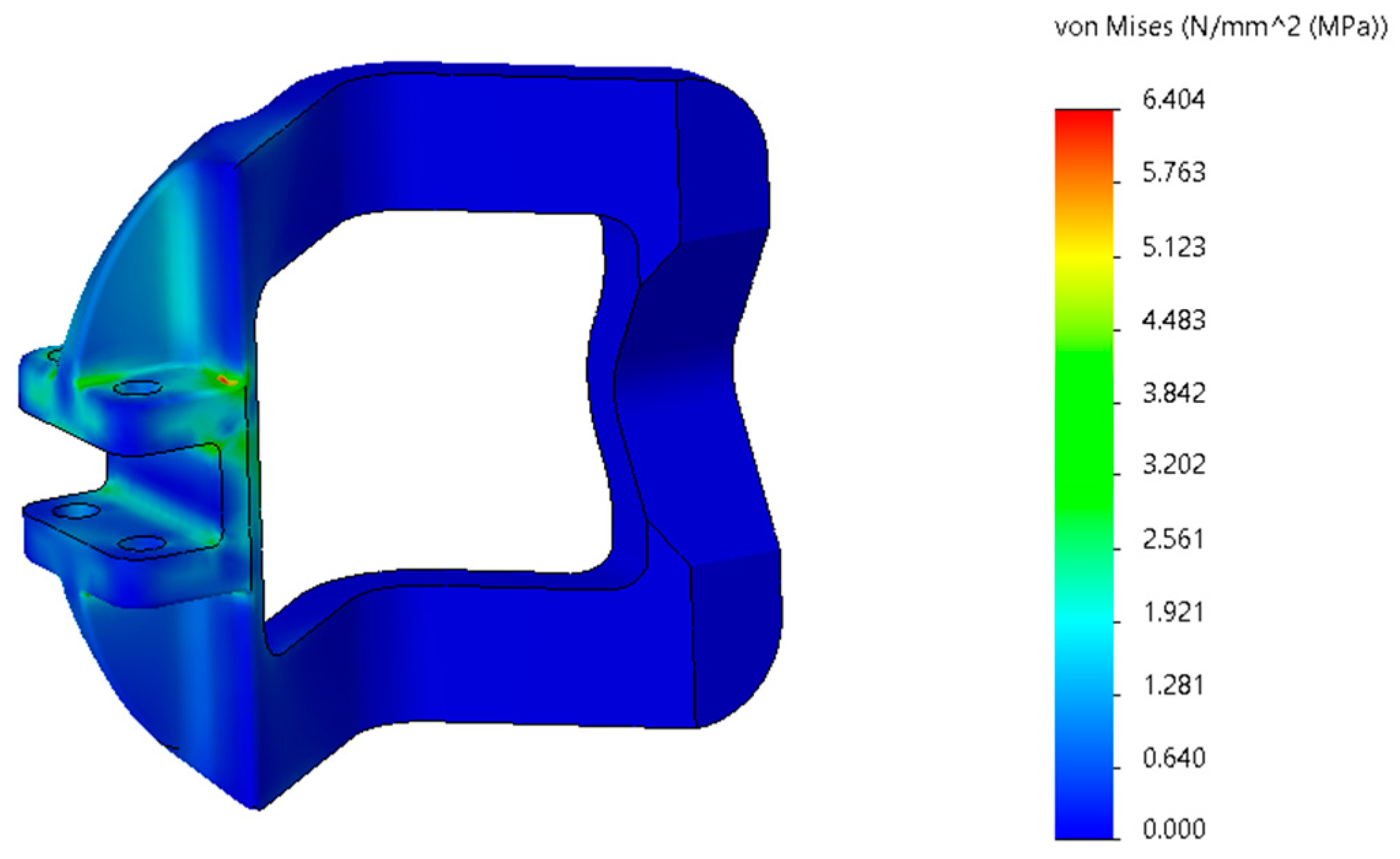
7.2. Gripper Simulation
7.3. Motion Range Tests
7.4. Climbing Speed Tests
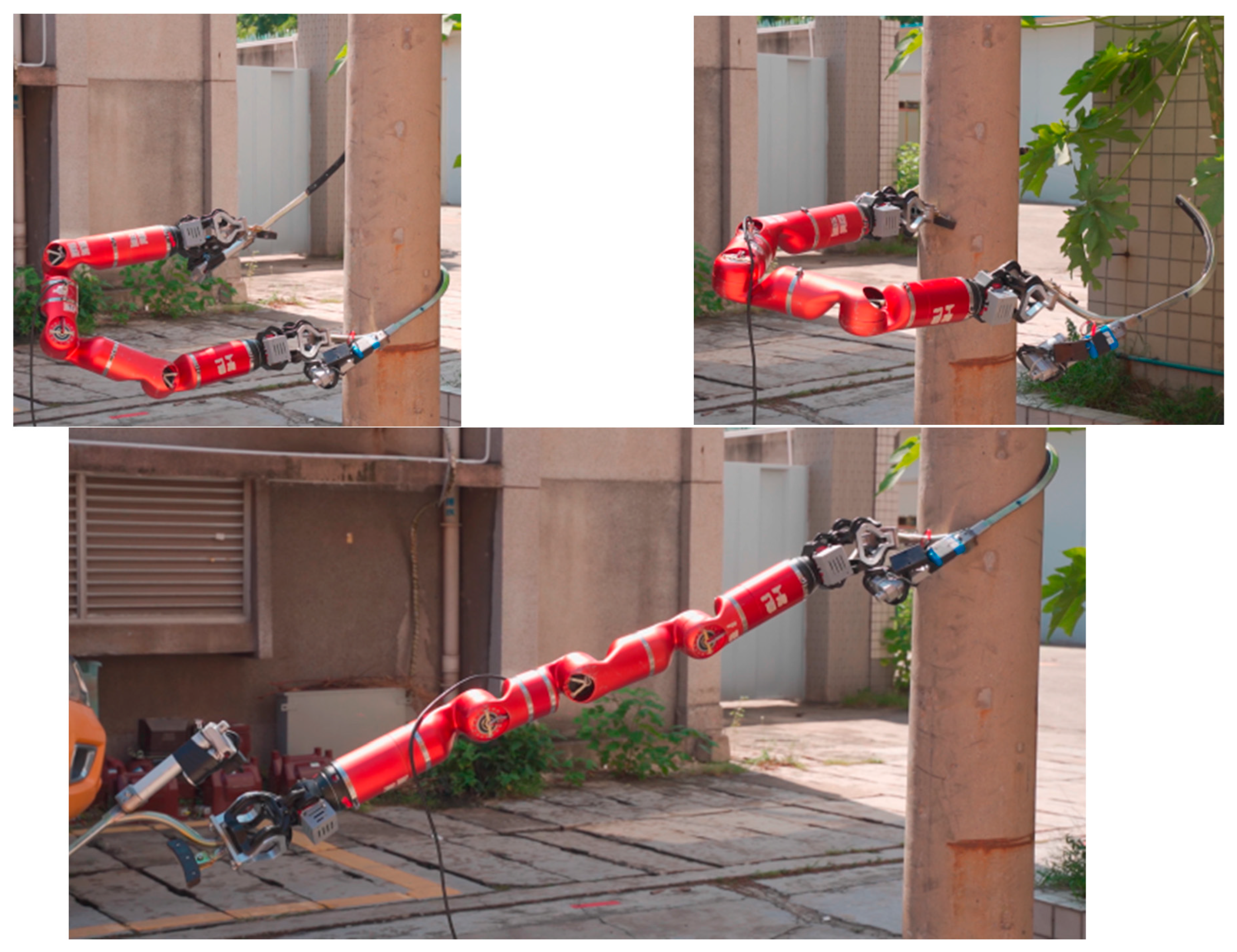
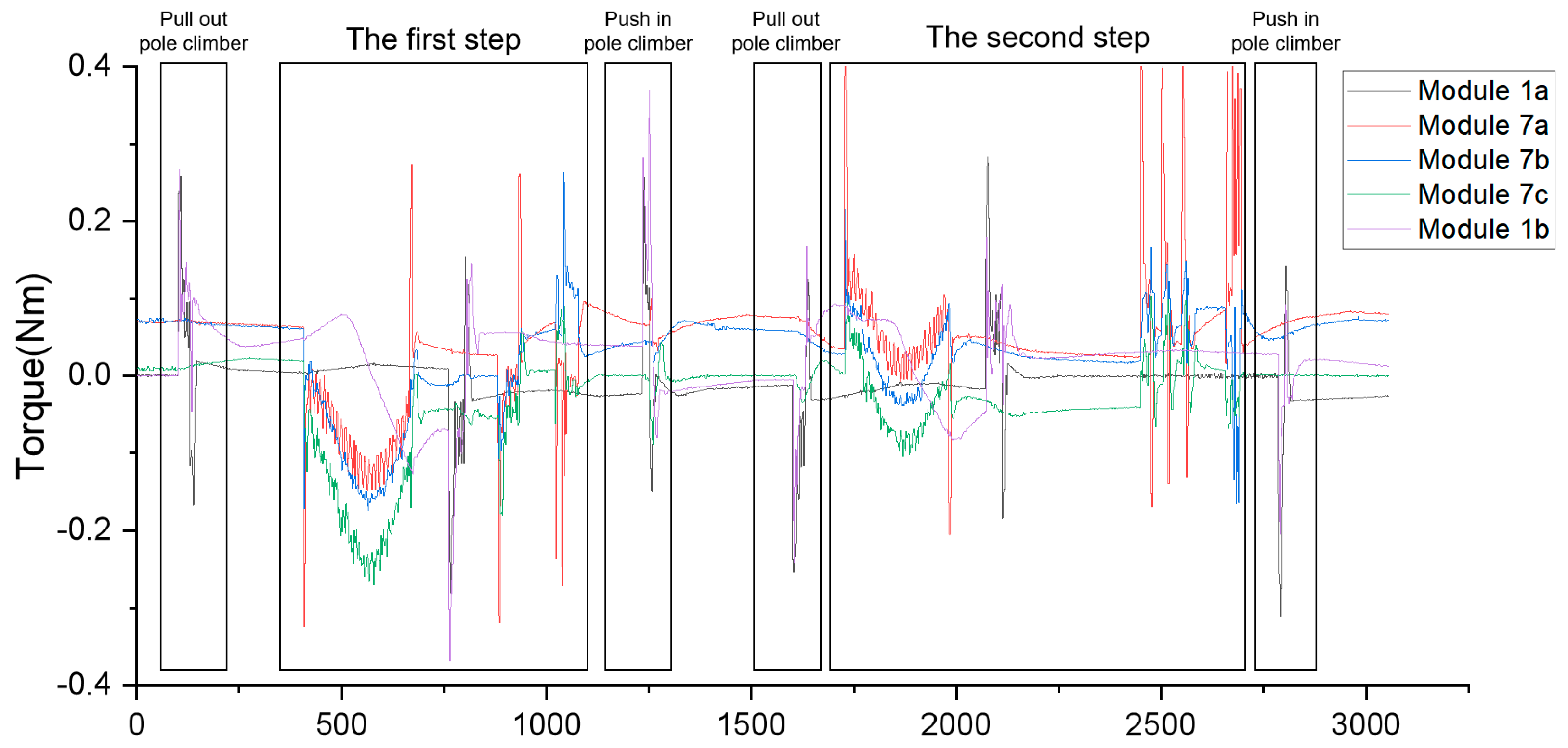
7.5. Climbing Tests
7.6. Operation Tests
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Komaromi, P. Live working method comparisons: Rubber glove work vs. hot stick work vs. barehand work. In Proceedings of the 2017 12th International Conference on Live Maintenance (ICOLIM), Budapest, Hungary, 26–28 April 2017; pp. 1–6. [Google Scholar]
- Martin, F.; Kiener, P. Live working training organisation in France. In Proceedings of the 2017 12th International Conference on Live Maintenance (ICOLIM), Budapest, Hungary, 26–28 April 2017; pp. 1–6. [Google Scholar]
- Jiang, W.; Wu, G.; Wang, W. Manipulator dynamic modeling and motion planning for live working robot. Chin. J. Eng. 2016, 38, 867–875. [Google Scholar]
- Zhang, L.; Yu, G.; Liu, Z.; Liu, T.; Hu, Y.; Liu, K. Research on Safety Protection of live working robot on 10 kV Distribution Line. In Proceedings of the 2020 IEEE International Conference on High Voltage Engineering and Application (ICHVE), Beijing, China, 6–10 September 2020; pp. 1–6. [Google Scholar]
- Howlader, O.F.; Sattar, T.P. Finite Element Analysis based Optimization of Magnetic Adhesion Module for Concrete Wall Climbing Robot. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 8–18. [Google Scholar]
- Zhang, J.; Liao, D.; Guo, P. Design of a Live Work Climbing Robot Platform for the Distribution. In Proceedings of the 2021 China International Conference on Electricity Distribution (CICED), Shanghai, China, 7–9 April 2021; pp. 252–258. [Google Scholar]
- Tavakoli, M.; Zakerzadeh, M.; Vossoughi, G.; Bagheri, S. A hybrid pole climbing and manipulating robot with minimum DoFs for construction and service applications. J. Ind. Robot. 2005, 32, 171–178. [Google Scholar] [CrossRef]
- Tavakoli, M.; Marques, L.; Almeida, A. Self Calibration of Step-by-Step Based Climbing Robots. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 3297–3303. [Google Scholar]
- Arikawa, K.; Hirose, S. Study of Walking Robot for 3 Dimensional Terrain (optimization of walking motion based on GDA and Coupled Drive). In Proceedings of the IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; pp. 703–708. [Google Scholar]
- Tavakoli, M.; Marjovi, A.; Marques, L.; Almeida, A. 3DCLIMBER: A climbing robot for inspection of 3D human made structures. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 4130–4135. [Google Scholar]
- Hirose, S.; Arikawa, K. Coupled and decoupled actuation of robotic mechanisms. In Proceedings of the IEEE International Conference on Robotics and Automation 2000, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 33–39. [Google Scholar]
- Shimada, A.; Dung, N.A. Equilibrium state control for climbing robot. In Proceedings of the IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016; pp. 455–460. [Google Scholar]
- Mustapa, M.A.; Othman, W.A.F.W.; Abu, B.E.; Othman, A.R. Development of Pole-Like Tree Spiral Climbing Robot. In Intelligent Manufacturing & Mechatronics; Springer: Singapore, 2018; pp. 285–293. [Google Scholar]
- Zhu, P.; Zhu, A.; Zhang, Q.; Wang, Y.; Zhang, X.; Cao, G. Design of Gibbon-Like Crawling Robot for High Voltage Transmission Line Inspection. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2018; pp. 16–20. [Google Scholar]
- Melingui, A.; Lakhal, O.; Daachi, B.; Mbede, J.B.; Merzouki, R. Adaptive Neural Network Control of a Compact Bionic Handling Arm. IEEE/ASME Trans. Mechatron. 2015, 20, 2862–2875. [Google Scholar] [CrossRef]
- Escande, C.; Chettibi, T.; Merzouki, R.; Coelen, V.; Pathak, P.M. Kinematic Calibration of a Multisection Bionic Manipulator. IEEE/ASME Trans. Mechatron. 2015, 20, 663–674. [Google Scholar] [CrossRef]
- Lee, Y.H.; Lee, Y.H.; Lee, H.; Kang, H.; Lee, J.H. Development of a Quadruped Robot System With Torque-Controllable Modular Actuator Unit. IEEE Trans. Ind. Electron. 2021, 68, 7263–7273. [Google Scholar] [CrossRef]
- Mämpel, J.; Gerlach, K.; Schilling, C.; Witte, H. A modular robot climbing on pipe-like structures. In Proceedings of the 4th International Conference on Autonomous Robots and Agents, Wellington, New Zealand, 10–12 February 2009; pp. 87–91. [Google Scholar]
- Guan, Y.; Jiang, L.; Zhang, X.; Zhang, H.; Zhou, X. Development of novel robots with modular methodology. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2385–2390. [Google Scholar]
- Guan, Y.; Jiang, L.; Zhu, H.; Zhou, X.; Cai, C.; Wu, W.; Zhang, H.; Zhang, X. Climbot: A modular bio-inspired biped climbing robot. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1473–1478. [Google Scholar]
- Guan, Y.; Zhu, H.; Wu, W.; Zhou, X.; Jiang, L.; Cai, C.; Zhang, L.; Zhang, H. A Modular Biped Wall-Climbing Robot With High Mobility and Manipulating Function. IEEE/ASME Trans. Mechatron. 2013, 18, 1787–1798. [Google Scholar] [CrossRef]
- Zhu, H.; Guan, Y.; Cai, C.; Jiang, L.; Zhang, X.; Zhang, H. W-climbot: A biped modular wall-climbing robot. In Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010; pp. 1399–1404. [Google Scholar]
- Zhu, H.; Guan, Y.; Wu, W.; Zhang, L.; Zhou, X.; Zhang, H. Autonomous Pose Detection and Alignment of Suction Modules of a Biped Wall-Climbing Robot. IEEE/ASME Trans. Mechatron. 2015, 20, 653–662. [Google Scholar] [CrossRef]
- Koubaa, A. Robot Operating System (ROS): The Complete Reference; Springer: Berlin/Heidelberg, Germany, 2016; Volume 1. [Google Scholar]
- Diankov, R. Automated Construction of Robotics Manipulation Programs. Ph.D. Thesis, Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, USA, August 2010. [Google Scholar]
- Li, J.; Yisheng, G.; Xuefeng, Z.; Tieniu, Y.; Manjia, S.; Hongmin, W. Grasping Performance Analysis of a Biped-pole-climbing Robot. J. Mech. Eng. 2016, 53, 34–40. [Google Scholar]
- Lee, W.; Hirai, M.; Hirose, S. Gunryu III: Reconfigurable Magnetic Wall Climbing Robot for Decommissioning of Nuclear Reactor. Adv. Robot. 2013, 27, 1099–1111. [Google Scholar] [CrossRef]
- Guan, Y.; Jiang, L.; Zhang, X.; Zhang, H. Climbing Gaits of A Modular Biped Climbing Robot. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 532–537. [Google Scholar]
- Shang, J.; Sattar, T.; Chen, S.; Bridge, B. Design of a climbing robot for inspecting aircraft wings and fuselage. J. Ind. Robot. 2007, 34, 495–502. [Google Scholar] [CrossRef]
- Wang, W.; Wang, K.; Li, D.; Zong, G. Basic Research on Configuration of Climbing Worm Robot. J. Beijing Univ. Aeronaut. Astronaut. 2009, 35, 251–255. [Google Scholar]
- Liu, R.; Chen, R.; Shen, H.; Zhang, R. Wall Climbing Robot Using, Electrostatic Adhesion Force Generated by Flexible Inter-digital Electrodes. Int. J. Adv. Robot. Syst. 2013, 10, 36. [Google Scholar] [CrossRef]
- Xiao, J.; Sadegh, A.; Elliott, M.; Calle, A.; Persad, A.; Chiu, H.M. Design od Mobile Robots with Wall Climbing Capability. In Proceedings of the International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005. [Google Scholar]
- Suzuki, M.; Kitai, S.; Hirose, S. New Type Child Units of Anchor Climber: Swarm Type Wall Climbing Robot System. In Proceedings of the International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Climbing Gaits | Inchworm | Turning-Around | Turning-Over |
|---|---|---|---|
| Key module | 7-type | 1-type | 7-type |
| Max step length | 2l1 | 2l1 | |
| Space required | Small, 2D | Middle, 3D | Big, 2D |
| Obstacle climbing ability | Least | Good | Good |
| Biomimetic | Yes, inchworm | Yes, human legs | No |
| Test Results | |
|---|---|
| Grasping force | 0.6358 kN = 635.8 N |
| 0.6072 kN = 607.2 N | |
| 0.6062 kN = 606.2 N | |
| Test Items | Model | Test Results |
|---|---|---|
| Robot 6 DoF attitude performance detection and calibration | Leica-AT960LR | Maximum radius: 1635.00 mm |
| Minimum radius: 1108.10 mm |
| Position | Test Results | |
|---|---|---|
| Position Repeatability RP1 | P1 | 2.011 mm |
| P2 | 1.694 mm | |
| P3 | 2.230 mm | |
| P4 | 2.012 mm |
| Climbing Distance (m) | Time (s) | Climbing Speed (m/s) |
|---|---|---|
| 2 m | 28.57 | 0.07 |
| 2 m | 26.64 | 0.08 |
| 2 m | 29.43 | 0.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, J.; Guo, P.; Lin, Y. A Novel Modular Biomimetic Live Working Robot for Power Distribution Line. Machines 2022, 10, 195. https://doi.org/10.3390/machines10030195
Luo J, Guo P, Lin Y. A Novel Modular Biomimetic Live Working Robot for Power Distribution Line. Machines. 2022; 10(3):195. https://doi.org/10.3390/machines10030195
Chicago/Turabian StyleLuo, Jianbin, Peng Guo, and Yueke Lin. 2022. "A Novel Modular Biomimetic Live Working Robot for Power Distribution Line" Machines 10, no. 3: 195. https://doi.org/10.3390/machines10030195
APA StyleLuo, J., Guo, P., & Lin, Y. (2022). A Novel Modular Biomimetic Live Working Robot for Power Distribution Line. Machines, 10(3), 195. https://doi.org/10.3390/machines10030195