
Path Planning Strategy for a Manipulator Based on a Heuristically Constructed Network

Abstract
:1. Introduction
- (1)
- For the storage and computational resources problems caused by randomly generated nodes, a path planning strategy based on the heuristically constructed network (HCN) and a construction strategy for HCN are put forward to represent the work space for collision-free path planning. This operation can reduce the amount of data storage and data transmission, which is more suitable for resource-constrained conditions such as space exploration and on-orbit operation.
- (2)
- The nodes number of HCN is determined by quantitatively describing the connection time and connectivity of the network. The model of work space division and a hub configurations optimization model are established and solved to select the nodes. The above work can realize the heuristic selection of points. Based on these nodes, the HCN can get more efficient memory utilization.
- (3)
- By considering the similarity among the various configurations within the same region, the dissimilarity among all regions, and the correlation among adjacent regions, the evaluation indexes of regional properties are established for the work space division. These regions obtained can get better performance for connectivity, which can be used as the basis for hub configuration optimization.
2. Network-Based Collision-Free Path Planning Problem of Manipulators Analysis
3. Construction of HCN
3.1. Determination of Hub Configurations Number
3.2. Selection of Hub Configurations
3.2.1. Establishment of Evaluation Indexes for Region Connectivity
- The similarity index : This index is calculated by the mean of the total distance from all configurations to the corresponding regional center. It represents the dispersion of configurations. The smaller the , the higher the similarity of configurations corresponding to the same region.
- The dissimilarity index : This index is calculated by the mean distance between the center configuration of two regions. It reflects the dissimilarity between these regions. The higher the , the higher the difference between regions.
- The correlation index : This index is calculated by the spatial statistical correlation matrix corresponding to the spatial information contained in these regions. It reflects the adjacency relation of regions composed of some configurations represented by the sequence of joint angles in the manipulator joint space. The smaller the , the higher the quality of regions.where represents the element of row i and column j in matrix ; ; .
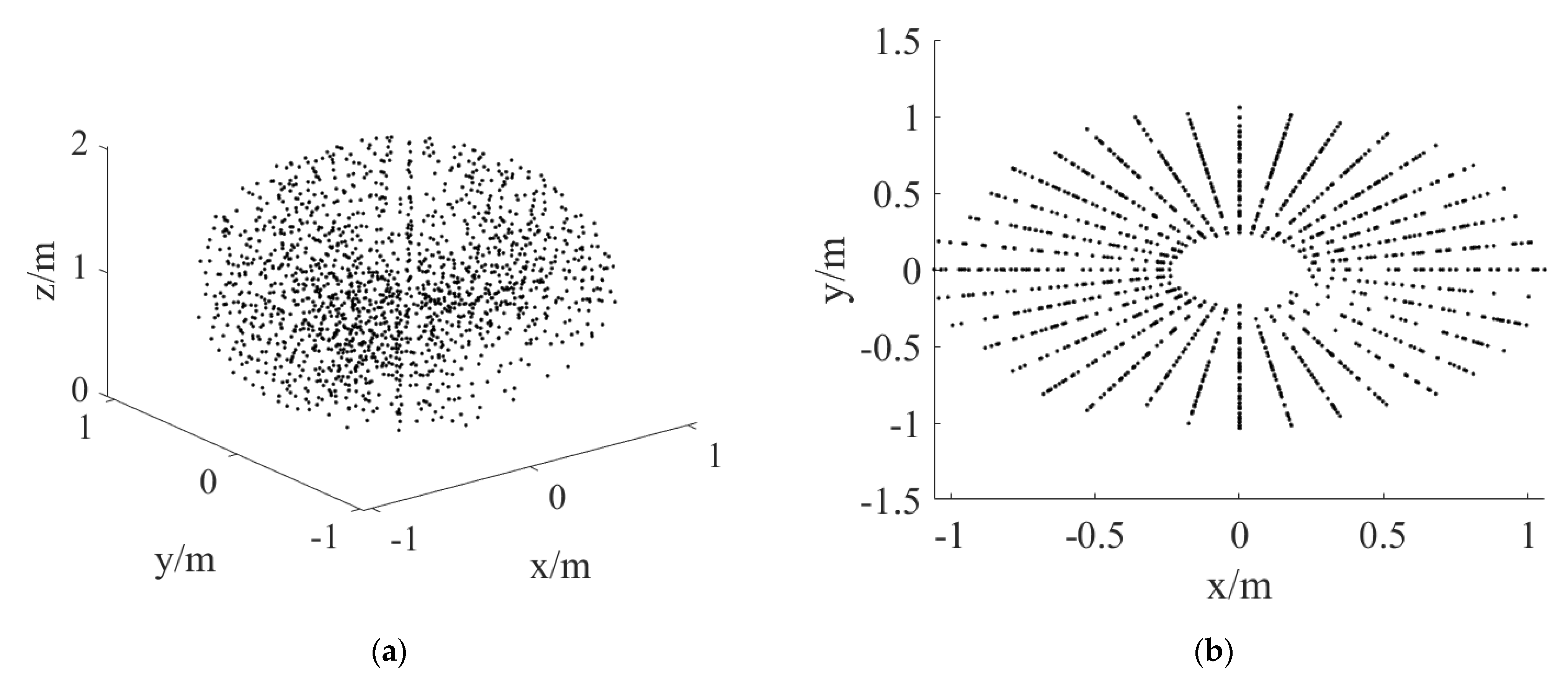
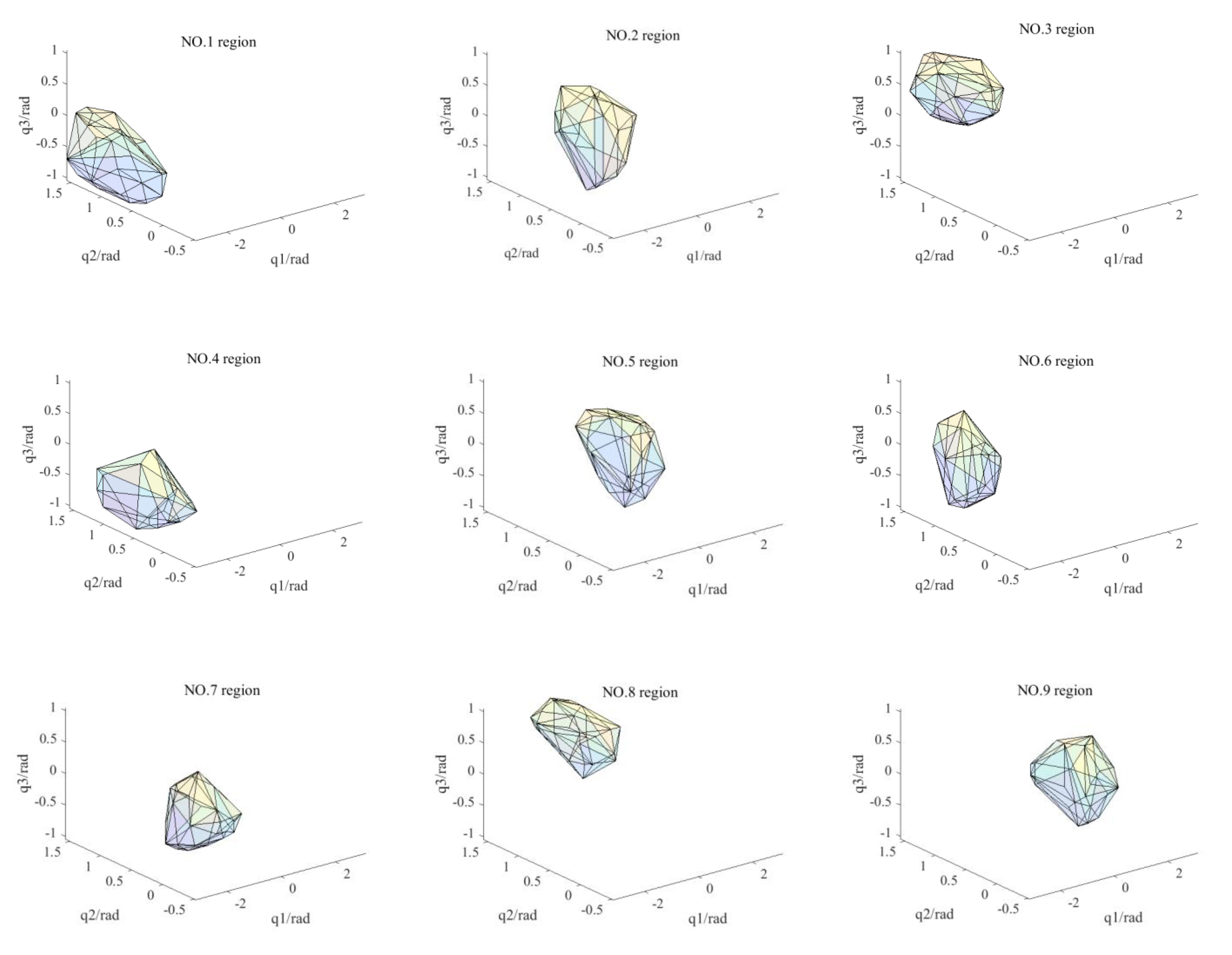
3.2.2. Division of Work Space Based on K-Means Clustering Algorithm
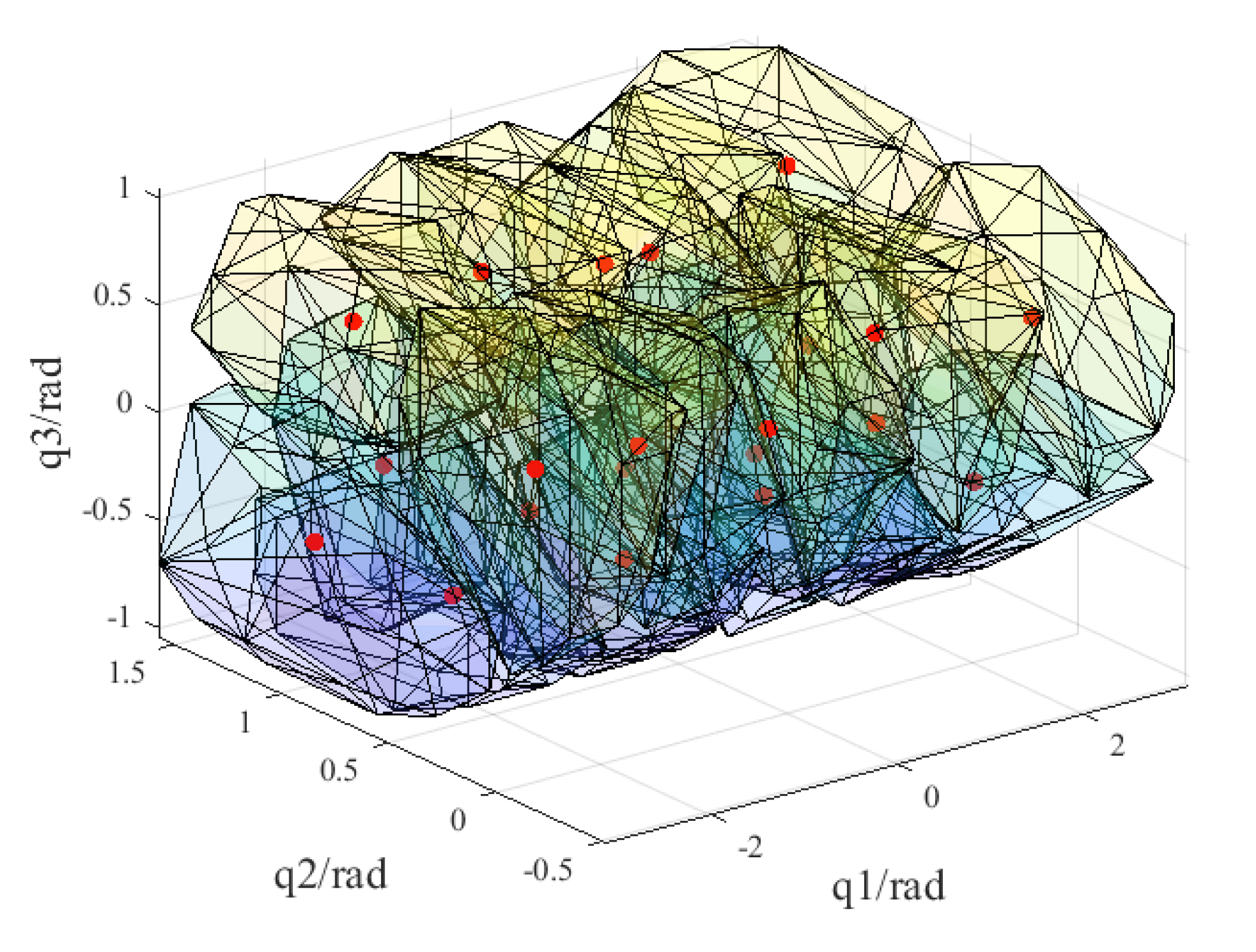
3.2.3. Hub Configurations Optimization
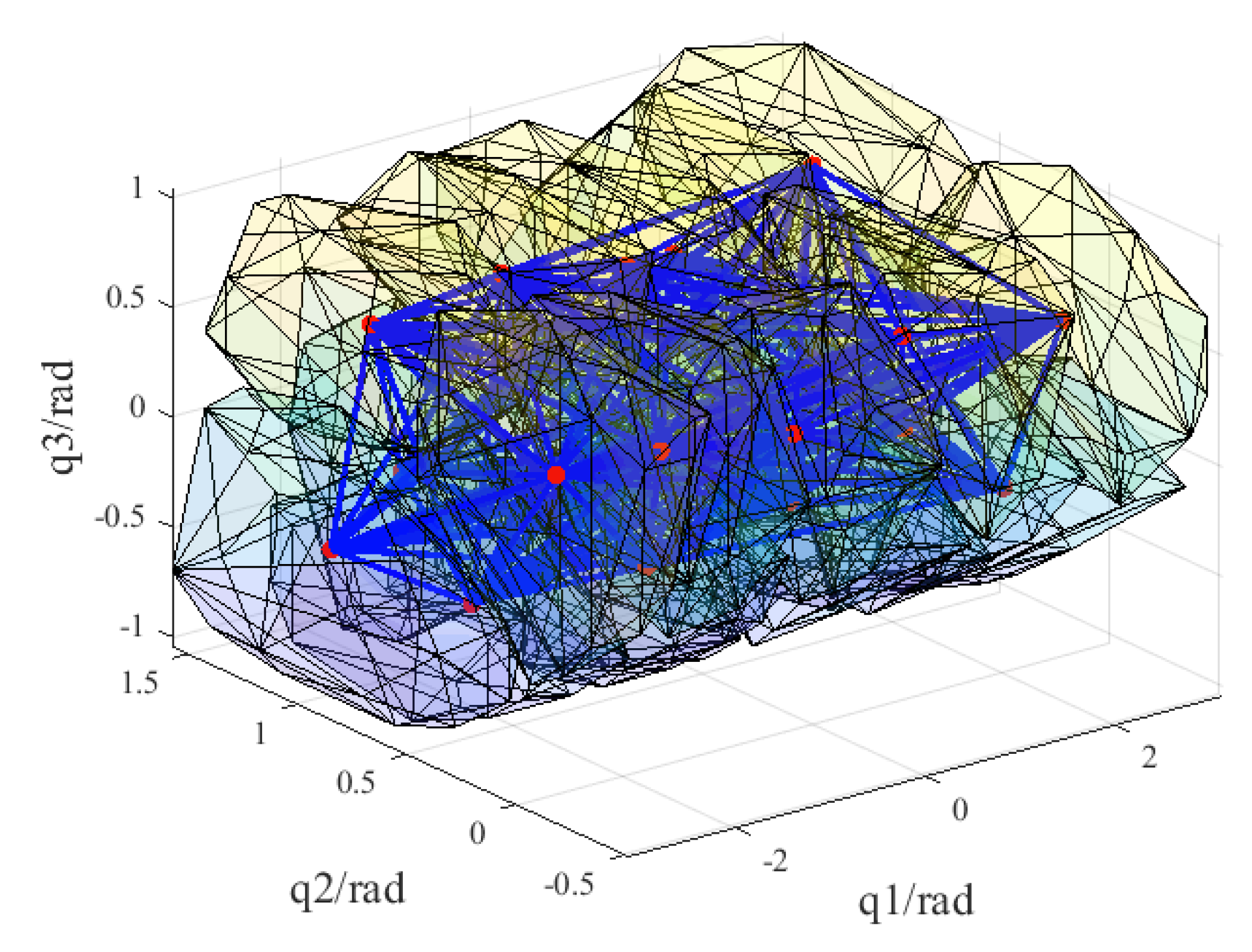
3.3. Connection of Hub Configurations
4. Simulation and Discussion
5. Conclusions
- A path planning strategy based on the heuristically constructed network (HCN) and a construction strategy for HCN are put forward to represent the work space for collision-free path planning, which aims at dealing with the storage and computational resources problems caused by randomly generated nodes.
- By considering the relationship among different configurations, the work space division based on evaluation indexes of regional properties can realize the heuristic determination of nodes number, and the selection of hub configurations can realize the heuristic search for network nodes, which can make searching a path based on this network faster and use fewer path points.
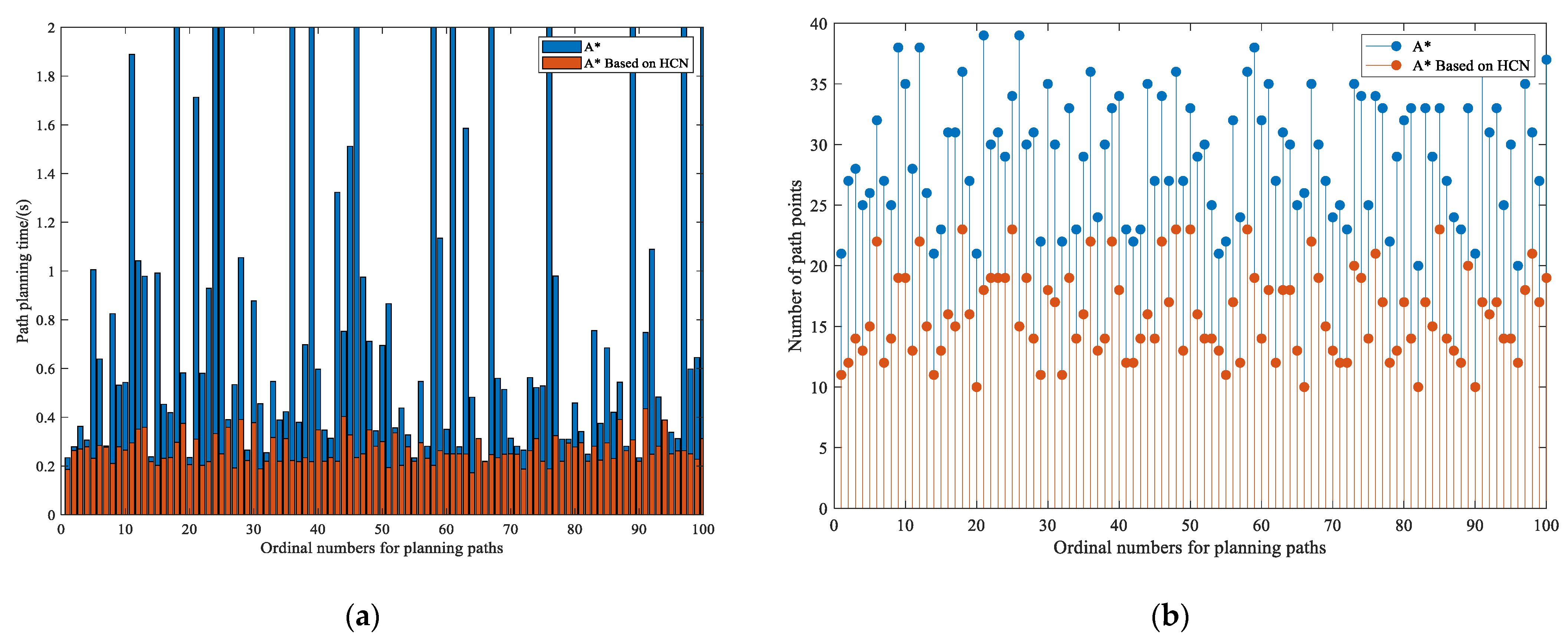
- The use of HCN in collision-free path planning of manipulators can reduce the average number of path points of the path by 45.5% and reduce the average time of path planning by 48.4%, which greatly improves the efficiency of path planning under resource constraints.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bostelman, R.; Hong, T.; Marvel, J. Survey of Research for Performance Measurement of Mobile Manipulators. J. Res. Natl. Inst. Stand. Technol. 2016, 121, 342–366. [Google Scholar] [CrossRef]
- Rahmani, B.; Belkheiri, M. Adaptive Neural Network Output Feedback Control for Flexible Multi-Link Robotic Manipulators. Int. J. Control 2019, 92, 2324–2338. [Google Scholar] [CrossRef]
- Yang, C.; Li, Q.C.; Chen, Q.H. Multi-objective optimization of parallel manipulators using a game algorithm. Appl. Math. Model. 2019, 74, 217–243. [Google Scholar] [CrossRef]
- Farsoni, S.; Ferraguti, F.; Bonfe, M. Safety-oriented robot payload identification using collision-free path planning and decoupling motions. Rob. Comput. Integr. Manuf. 2019, 59, 189–200. [Google Scholar] [CrossRef]
- Chaari, I.; Koubaa, A.; Bennaceur, H.; Ammar, A.; Alajlan, M.; Youssef, H. Design and performance analysis of global path planning techniques for autonomous mobile robots in grid environments. Int. J. Adv. Rob. Syst. 2017, 14, 1729881416663663. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE-Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Liu, C.; Mao, Q.; Chu, X.; Xie, S. An Improved A-Star Algorithm Considering Water Current, Traffic Separation and Berthing for Vessel Path Planning. Appl. Sci. 2019, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Trovato, K.I.; Dorst, L. Differential A*. IEEE Trans. Knowl. Data Eng. 2002, 14, 1218–1229. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Pradhan, S.K.; Tripathy, H.K.; Jena, P.K. A Modified Real Time A* Algorithm and Its Performance Analysis for Improved Path Planning of Mobile Robot. Smart Innov. Syst. Technol. 2015, 32, 221–234. [Google Scholar]
- Fu, B.; Chen, L.; Zhou, Y.; Dong, Z.; Pan, H. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Rob. Autom. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- Metea, M.B.; Tsai, J.P. Route planning for intelligent autonomous land vehicles using hierarchical terrain representation. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; pp. 1947–1952. [Google Scholar]
- Qin, L.; Hu, Y.; Yin, Q.J.; Zeng, J. Speed Optimization for Incremental Updating of Grid-Based Distance Maps. Appl. Sci. 2019, 9, 2029. [Google Scholar] [CrossRef] [Green Version]
- Duchon, F.; Babinec, A.; Kajan, M.; Beno, P.; Florel, M.; Fico, T.; Jurisica, L. Path Planning with Modified a Star Algorithm for a Mobile Robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Zuo, L.; Guo, Q.; Xu, X.; Fu, H. A hierarchical path planning approach based on A* and least-squares policy iteration for mobile robots. Neurocomputing 2015, 170, 257–266. [Google Scholar] [CrossRef]
- Lozanoperez, T.; Wesley, M.A. An Algorithm for Planning Collison-Free Paths among Polyhedral Obstacles. Commun. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Storer, J.A.; Reif, J.H. Shortest Paths in the Plane with Polygonal Obstacles. J. Assoc. Comput. Mach. 1994, 41, 982–1012. [Google Scholar] [CrossRef]
- Lozano-Perez, T. Spatial planning: A configuration space approach. IEEE Trans. Comput. 1983, C-32, 108–120. [Google Scholar] [CrossRef] [Green Version]
- LaValle, S.M.; Kuffner, J.J., Jr. Randomized Kinodynamic Planning. Int. J. Rob. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Canny, J.; Donald, B. Simplified Voronoi Diagrams. In Proceedings of the 3rd Annual Symposium on Computational Geometry, Waterloo, ON, Canada, 8–10 June 1987; pp. 219–236. [Google Scholar]
- Takahashi, O.; Schilling, R.J. Motion planning in a plane using generalized Voronoi diagrams. IEEE Trans. Rob. Autom. 1989, 5, 143–150. [Google Scholar] [CrossRef]
- Kalra, N.; Ferguson, D.; Stentz, A. Incremental reconstruction of generalized Voronoi diagrams on grids. Rob. Autom. Syst. 2009, 57, 123–128. [Google Scholar] [CrossRef] [Green Version]
- Uster, H.; Dalal, J. Strategic emergency preparedness network design integrating supply and demand sides in a multi-objective approach. IISE Trans. 2017, 49, 395–413. [Google Scholar] [CrossRef]
- Zhou, X.X.; Zhang, H.P.; Ji, G.L.; Tang, G.A. A Method to Mine Movement Patterns between Zones: A Case Study of Subway Commuters in Shanghai. IEEE Access 2019, 7, 67795–67806. [Google Scholar] [CrossRef]
- Mostajabdaveh, M.; Gutjahr, W.J.; Sibel Salman, F. Inequity-averse shelter location for disaster preparedness. IISE Trans. 2019, 51, 809–829. [Google Scholar] [CrossRef]
- Legowski, A.; Niezabitowski, M. An industrial robot singular trajectories planning based on graphs and neural networks. AIP Conf. Proc. 2016, 1738, 480057. [Google Scholar]
- Qureshi, A.H.; Ayaz, Y. Potential functions based sampling heuristic for optimal path planning. Auton. Robot. 2016, 40, 1079–1093. [Google Scholar] [CrossRef] [Green Version]
- Gang, L.; Wang, J.F. PRM path planning optimization algorithm research. WSEAS Trans. Syst. Control 2015, 10, 148–153. [Google Scholar]
- Bottin, M.; Rosati, G. Trajectory Optimization of a Redundant Serial Robot Using Cartesian via Points and Kinematic Decoupling. Robotics 2019, 8, 101. [Google Scholar] [CrossRef] [Green Version]
- Karaman, S.; Frazzoli, E. Sampling-based Algorithms for Optimal Motion Planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A. An efficient k-means clustering algorithm: Analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Rouane, O.; Belhadef, H.; Bouakkaz, M. Combine clustering and frequent itemsets mining to enhance biomedical text summarization. Expert. Syst. Appl. 2019, 135, 362–373. [Google Scholar] [CrossRef]
- Peng, J.H.; Wang, W.; Yu, Y.Q.; Gu, H.L.; Huang, X.H. Clustering Algorithms to Analyze Molecular Dynamics Simulation Trajectories for Complex Chemical and Biological Systems. Chin. J. Chem. Phys. 2018, 31, 404–420. [Google Scholar] [CrossRef]
 denotes a configuration of the manipulator. The blue line indicates that there are possible collision-free paths between two configurations.
denotes a configuration of the manipulator. The blue line indicates that there are possible collision-free paths between two configurations.
denotes a configuration of the manipulator. The blue line indicates that there are possible collision-free paths between two configurations.
denotes a configuration of the manipulator. The blue line indicates that there are possible collision-free paths between two configurations.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Definition |
|---|---|
| n | the degrees-of-freedom (DOF) of a manipulator |
| qi | the angle of the ith joint, i = 1,2, …, n |
| a configuration, i.e., joint angles of the manipulator | |
| a set consisting of m configurations | |
| a hub configuration | |
| a set consisting of p hub configurations | |
| configurations, i = 1,2, …, p | |
| , i = 1,2, …, p | |
| a set consisting of p center configurations |
| Link i | α (°) | A (mm) | θ (°) | d (mm) |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 1000 |
| 2 | 90 | 0 | −90 | 0 |
| 3 | 0 | 550 | 0 | 0 |
| E | 90 | 0 | 0 | 550 |
| Obstacle | Center (mm) | Radius (mm) |
|---|---|---|
| 1 | [−400; 400; −400] | 300 |
| Experiment 1 | Experiment 2 | Lower than Experiment 1 | ||
|---|---|---|---|---|
| Planning time/(s) | Max | 33.994 | 0.435 | 0.992646 |
| Min | 0.219 | 0.172 | 0.002571 | |
| Average | 2.585619 | 0.26566 | 0.484 | |
| Path points | Max | 39 | 23 | 0.615385 |
| Min | 20 | 10 | 0.30303 | |
| Average | 29.19 | 15.93 | 0.455 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fei, J.; Chen, G.; Jia, Q.; Liang, C.; Wang, R. Path Planning Strategy for a Manipulator Based on a Heuristically Constructed Network. Machines 2022, 10, 71. https://doi.org/10.3390/machines10020071
Fei J, Chen G, Jia Q, Liang C, Wang R. Path Planning Strategy for a Manipulator Based on a Heuristically Constructed Network. Machines. 2022; 10(2):71. https://doi.org/10.3390/machines10020071
Chicago/Turabian StyleFei, Junting, Gang Chen, Qingxuan Jia, Changchun Liang, and Ruiquan Wang. 2022. "Path Planning Strategy for a Manipulator Based on a Heuristically Constructed Network" Machines 10, no. 2: 71. https://doi.org/10.3390/machines10020071
APA StyleFei, J., Chen, G., Jia, Q., Liang, C., & Wang, R. (2022). Path Planning Strategy for a Manipulator Based on a Heuristically Constructed Network. Machines, 10(2), 71. https://doi.org/10.3390/machines10020071