
Modeling Lane-Changing Behavior Based on a Joint Neural Network




Abstract
:1. Introduction
2. Model Descriptions
2.1. Car-Following Model
- (1)
- MV: The IDM is accepted widely in the field of traffic flow models [5]. It is chosen as the longitudinal control model for MVs in this paper.
- (2)
- ACC: Based on distance and speed errors, the car-following model for ACC vehicles is described as follows:
- (3)
2.2. Lane-Changing Models
- (1)
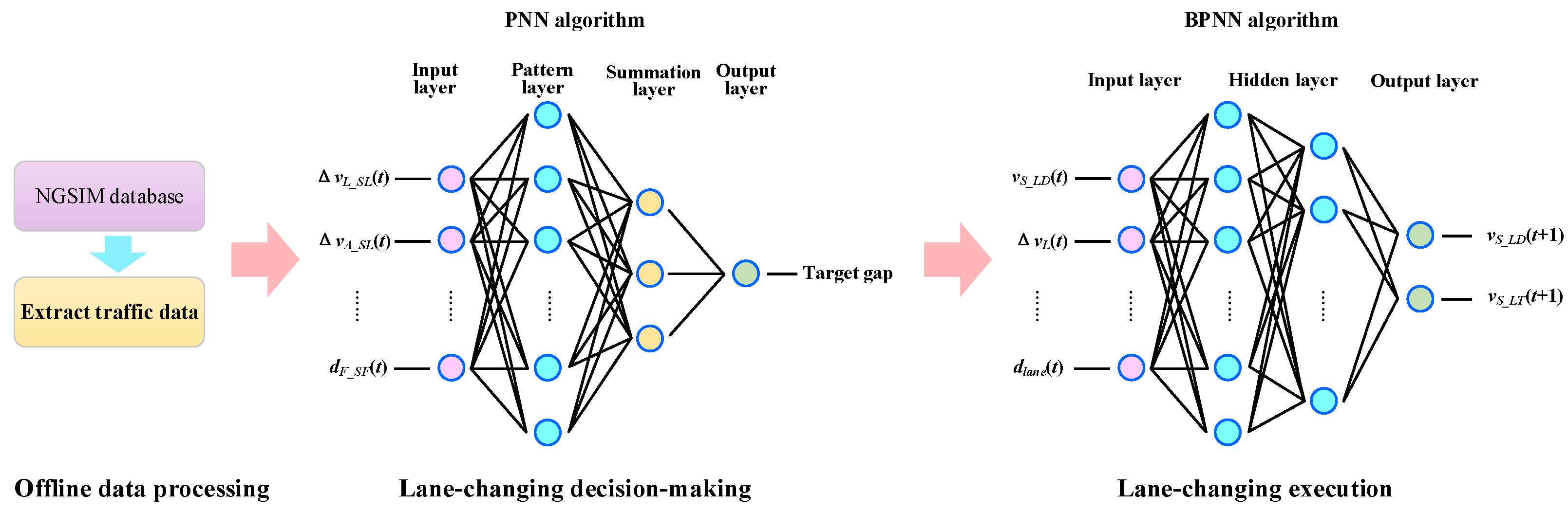
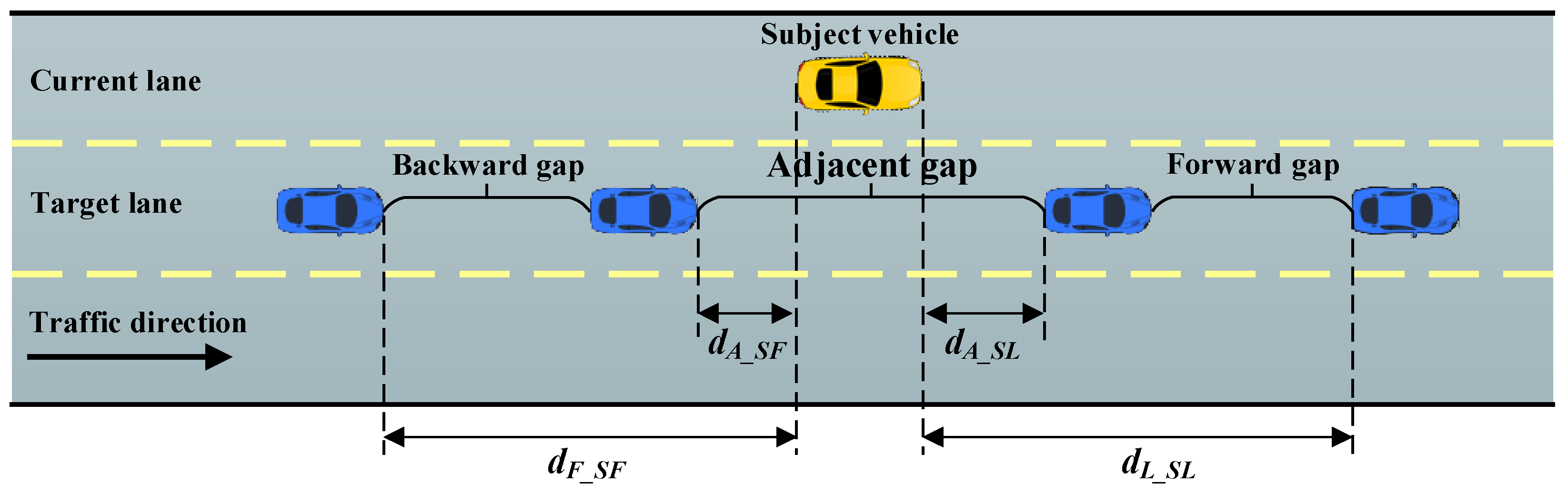
- Lane-changing decision-making model: The PNN algorithm takes three kinds of gaps into consideration, including adjacent gap, backward gap, and forward gap in the target lane, as shown in Figure 3. Therefore, the problem is simplified to the “one out of three” choice of gaps for lane-changing. Specifically, the model is described as follows:
- (2)
- Lane-changing execution model: When a vehicle starts to change to the target lane, it will interact with the leading and following vehicles in the target lane. Therefore, the parameters related to these vehicles have significant impact on lane-changing execution, such as speed difference and distance. General descriptions of the model are presented as follows:
2.3. Efficiency and Safety Evaluation Models
3. Model Calibration and Testing
3.1. Test Results of Lane-Changing Decision-Making Model
3.2. Test Results of Lane-Changing Execution Model
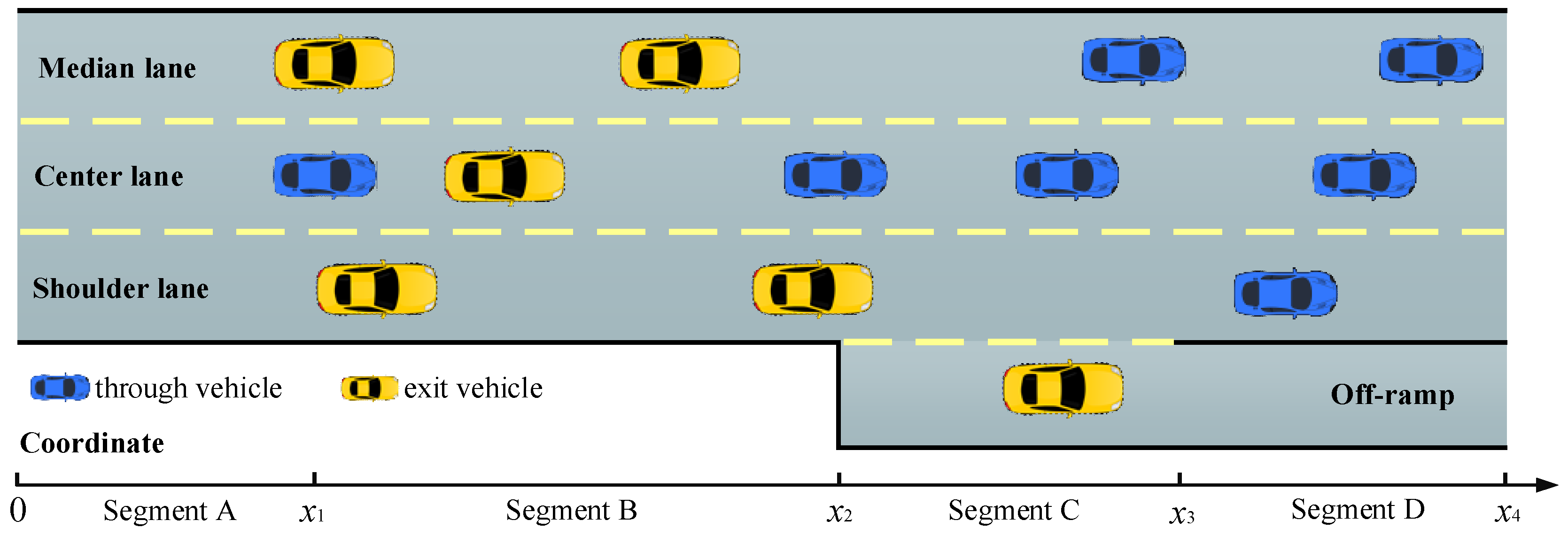
4. Simulation Preparations
5. Simulation Results and Discussion
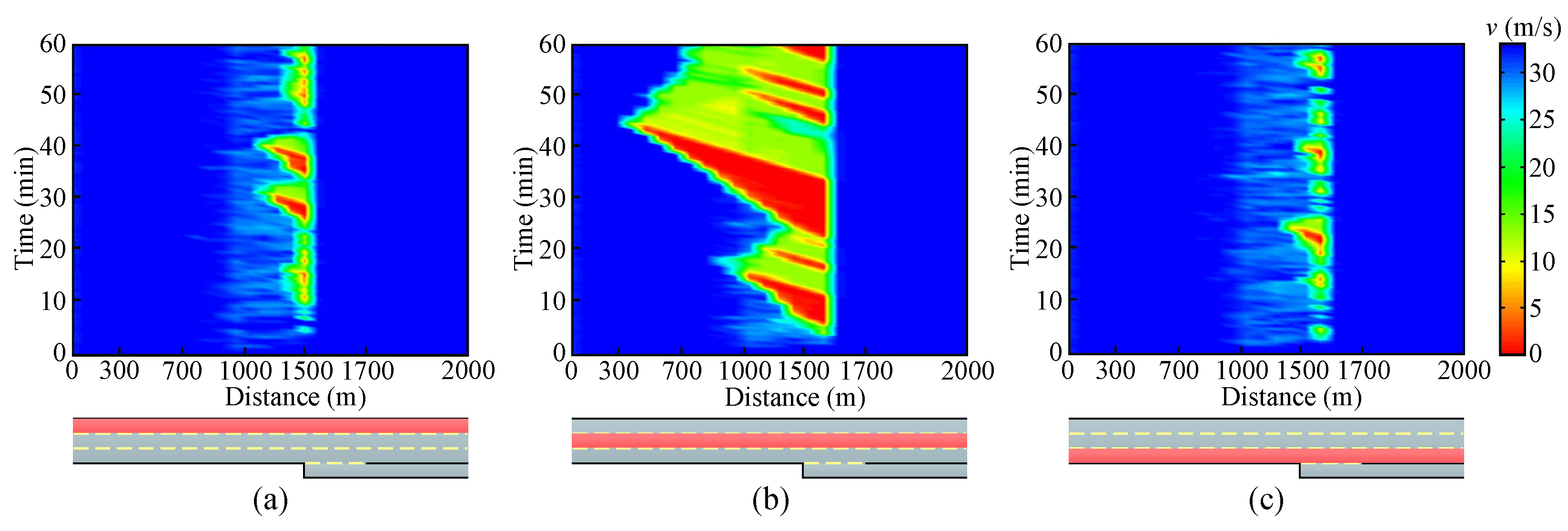
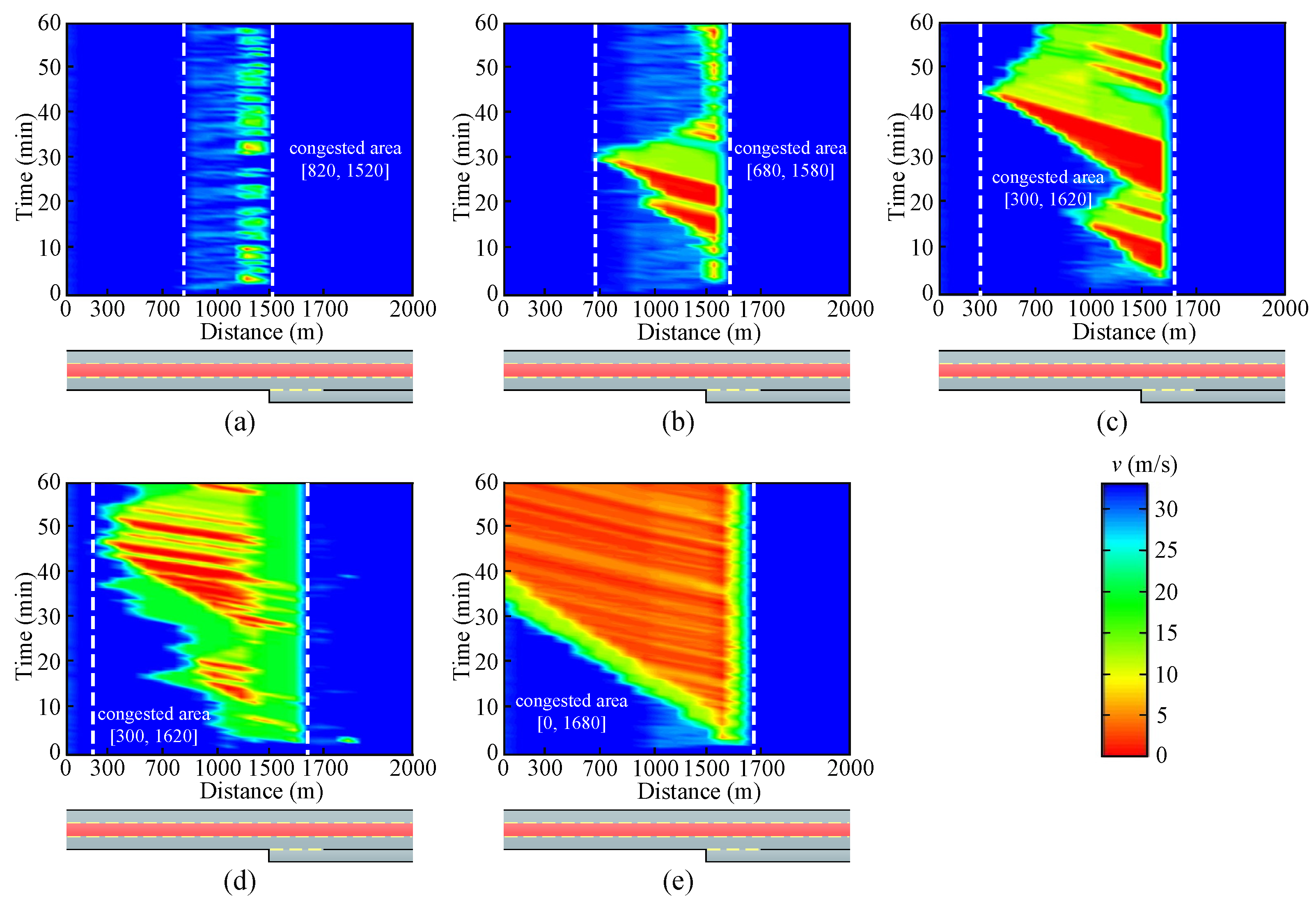
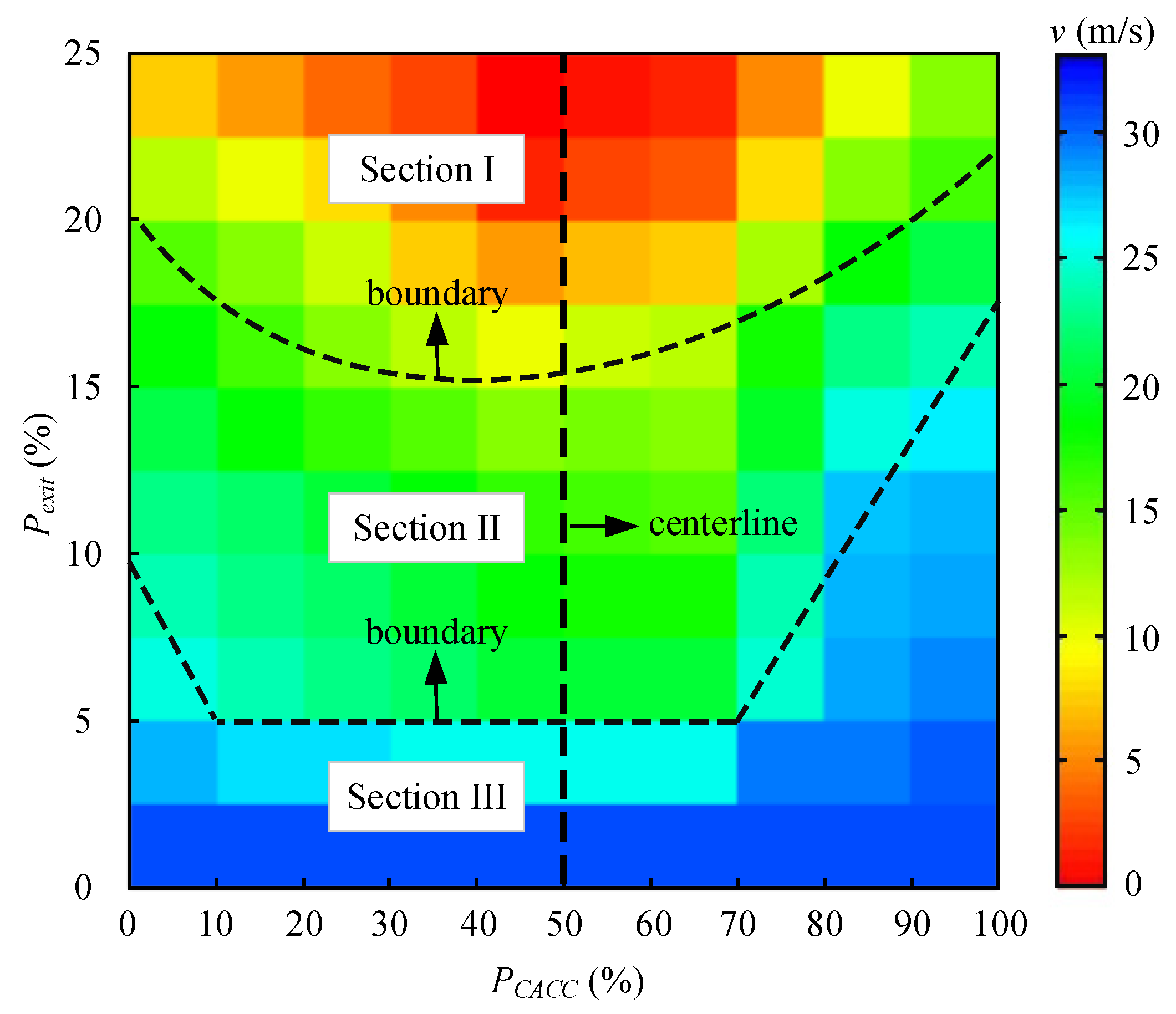
5.1. Impact on Average Speed
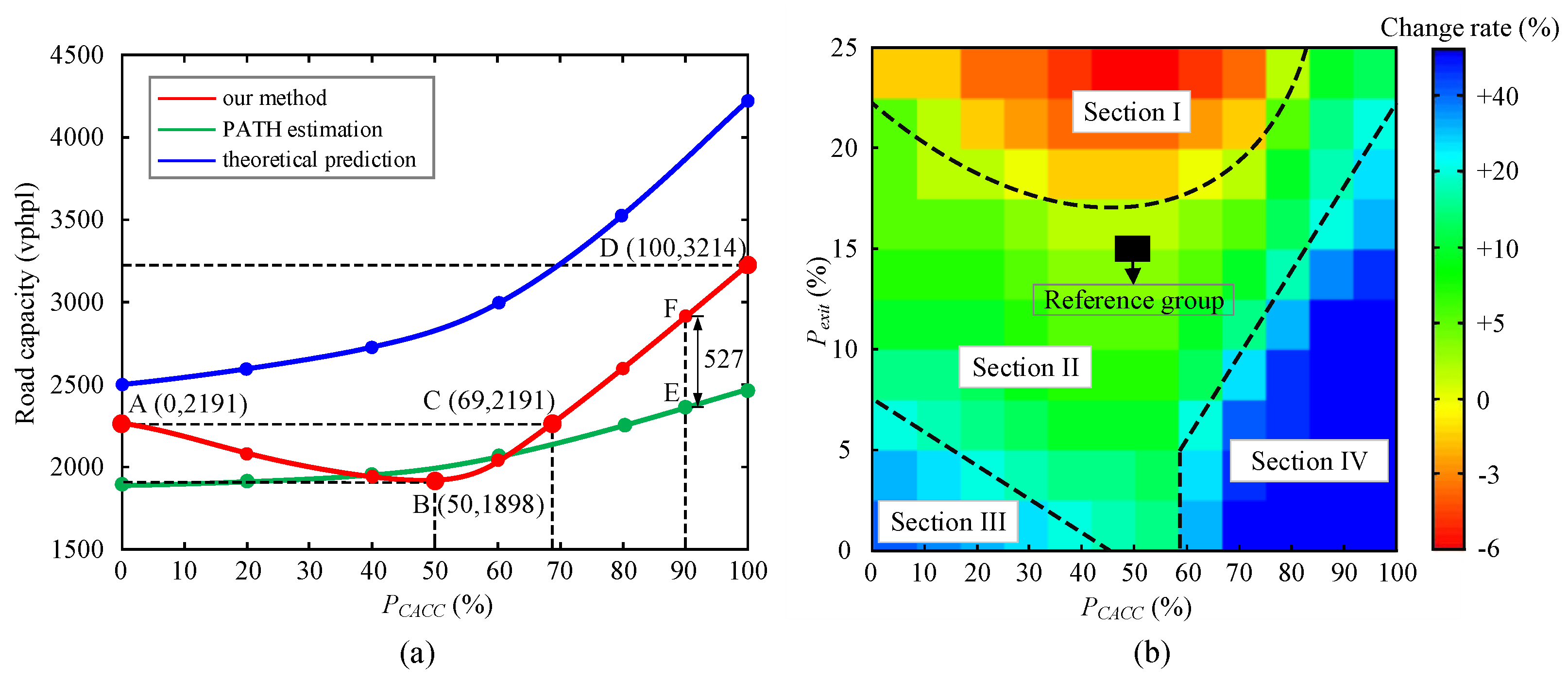
5.2. Impact on Road Capacity
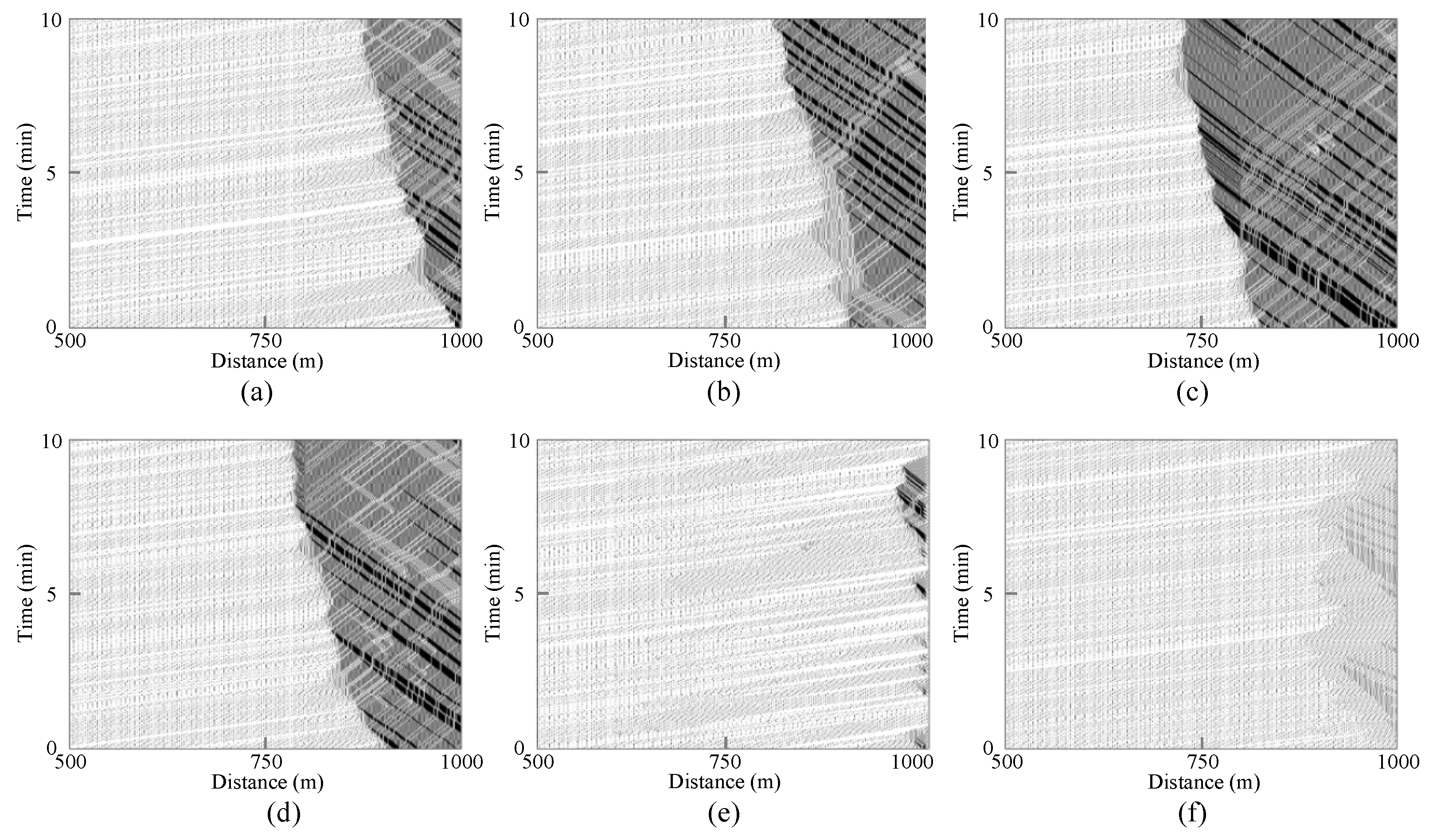
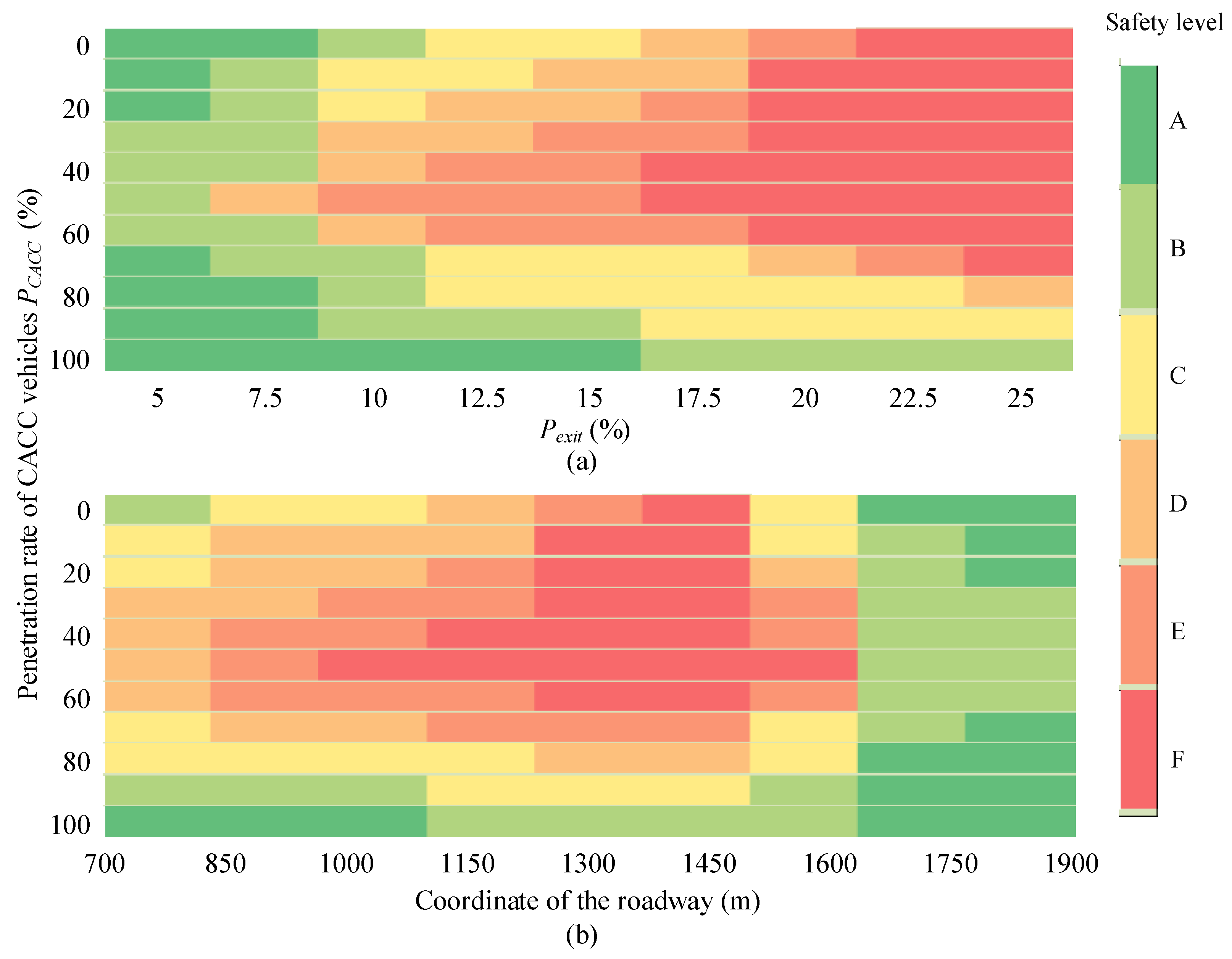
5.3. Impact on Safety
6. Conclusions
- (1)
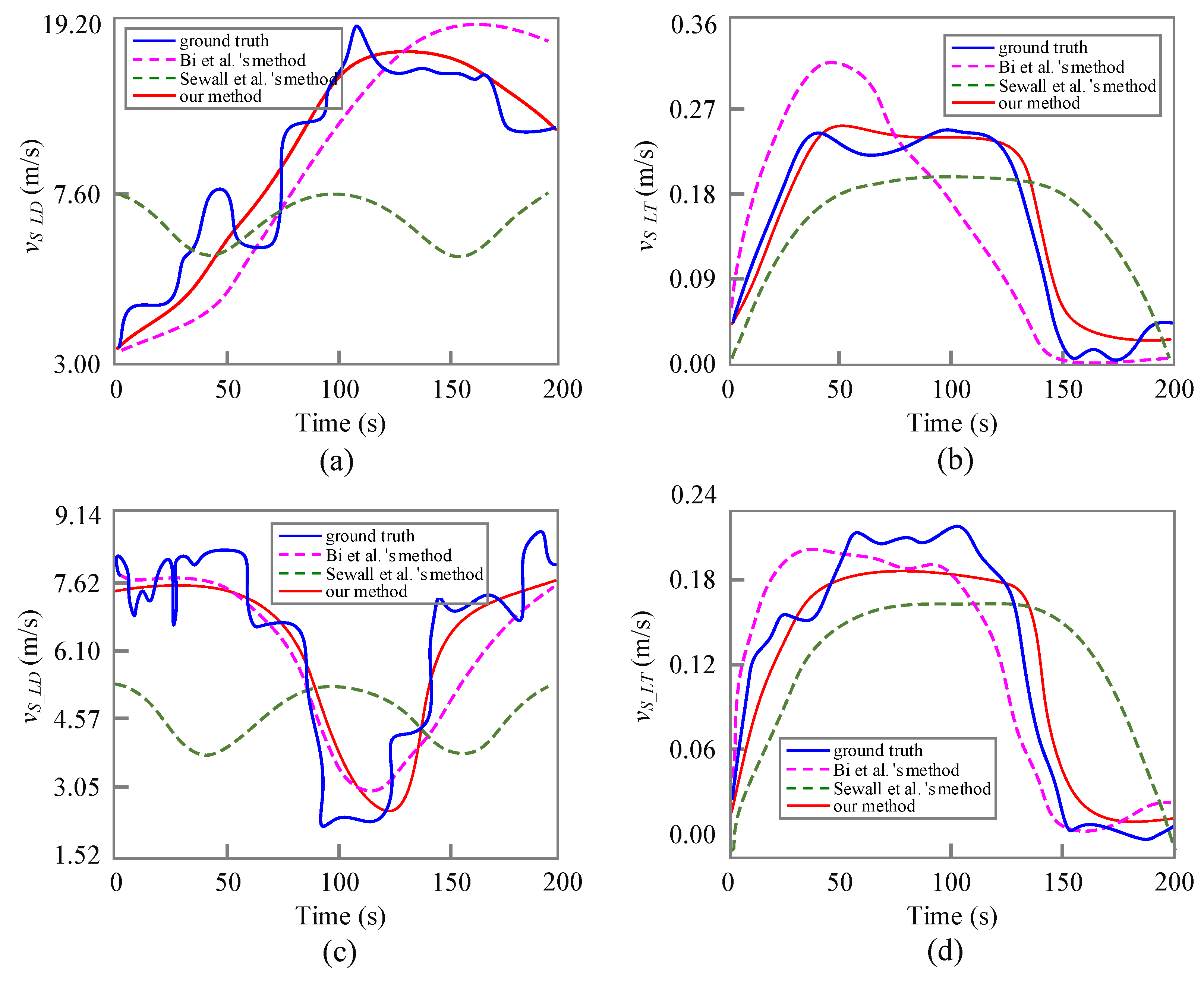
- The proposed hybrid neural network has distinct advantages over the two existing methods. Compared with the ground truth traffic, our method can accurately predict required gap for a lane change. Moreover, trajectories controlled by our method are evidently closer to the ones extracted from NGSIM dataset during lane-changing execution.
- (2)
- Based on car-following and lane-changing models, a simulation platform is established to investigate various traffic scenarios. The results indicate that the center lane is the most delicate lane near an off-ramp bottleneck. Frequent lane-changing maneuvers have the most negative impact on the center lane in terms of congestion severity. When PCACC is 50%, average speed in the center lane is dropped to 10 m/s with the increase of Pexit value. Moreover, severe congestions even cannot dissipate spontaneously at upstream of the off-ramp. In this case, decreasing Pexit or increasing PCACC is an efficient solution for traffic congestion reduction. The former can be realized by route guidance in a traffic network, while the latter makes full use of smaller headway and faster reaction of CACC vehicles.
- (3)
- The results of evaluation performance on road capacity and travel safety are quite sensitive to the values of PCACC and Pexit. When PCACC = 100%, road capacity reaches the peak 3214 vphpl, while the minimum is less than 1900 vphpl with 50% of CACC vehicles in the traffic system. For safety evaluation, when vehicles run within 600 m at upstream of the off-ramp, drivers and passengers are at the greatest risk of collision involvement. However, when PCACC is greater than 80% or Pexit is lower than 15%, the safety level is significantly improved from Level E to Level B.
- (4)
- Degradation of CACC performance is considered in this paper. So, the number of ACC vehicles reaches the maximum value when IVs and MVs account for half of the motor vehicle market. Furthermore, ACC vehicles require the longest headway in comparison with CACC vehicles and MVs. During a lane-changing process, ACC vehicles need the biggest headway gap between its leading vehicle and following one in the target lane. Therefore, CACC→ACC degradation can result in worse performance on efficiency and safety. Besides increasing more CACC vehicles, communication facilities equipped in more MVs also contribute to a better traffic system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shladover, S.E. Connected and automated vehicle systems: Introduction and overview. J. Transp. Syst. 2018, 22, 190–200. [Google Scholar] [CrossRef]
- Wang, Z.; Shi, X.; Li, X. Review of Lane-Changing Maneuvers of Connected and Automated Vehicles: Models, Algorithms and Traffic Impact Analyses. J. Indian Inst. Sci. 2019, 99, 589–599. [Google Scholar] [CrossRef]
- Shi, Y.; Yuan, Z.; Yu, H.; Guo, Y.; Qi, Y. A Graph-Based Optimal On-Ramp Merging of Connected Vehicles on the Highway. Machines 2021, 9, 290. [Google Scholar] [CrossRef]
- Ji, A.; Levinson, D. A review of game theory models of lane changing. Transp. A Transp. Sci. 2020, 16, 1628–1647. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bai, Y.; Zhang, Y.; Li, X.; Hu, J. Cooperative weaving for connected and automated vehicles to reduce traffic oscillation. Transp. A Transp. Sci. 2019, 1–19. [Google Scholar] [CrossRef]
- Ma, J.; Che, X.; Li, Y.; Lai, E.M.-K. Traffic Scenarios for Automated Vehicle Testing: A Review of Description Languages and Systems. Machines 2021, 9, 342. [Google Scholar] [CrossRef]
- Shladover, S.E.; Su, D.; Lu, X.-Y. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transp. Res. Rec. J. Transp. Res. Board 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Bouadi, M.; Jia, B.; Jiang, R.; Li, X.; Gao, Z. Optimizing sensitivity parameters of automated driving vehicles in an open heterogeneous traffic flow system. Transp. A Transp. Sci. 2021, 1–45. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Phys. A Stat. Mech. Its Appl. 2018, 512, 588–597. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Modeling connected and autonomous vehicles in heterogeneous traffic flow. Phys. A Stat. Mech. Its Appl. 2018, 490, 269–277. [Google Scholar] [CrossRef]
- Arvin, R.; Khattak, A.J.; Kamrani, M.; Rio-Torres, J. Safety evaluation of connected and automated vehicles in mixed traffic with conventional vehicles at intersections. J. Intell. Transp. Syst. 2021, 25, 170–187. [Google Scholar] [CrossRef]
- Wang, H.; Qin, Y.; Wang, W.; Chen, J. Stability of CACC-manual heterogeneous vehicular flow with partial CACC performance degrading. Transp. B Transp. Dyn. 2019, 7, 788–813. [Google Scholar] [CrossRef]
- Mahdinia, I.; Arvin, R.; Khattak, A.J.; Ghiasi, A. Safety, Energy, and Emissions Impacts of Adaptive Cruise Control and Cooperative Adaptive Cruise Control. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 253–267. [Google Scholar] [CrossRef]
- Gipps, P. A model for the structure of lane-changing decisions. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Dong, C.; Wang, H.; Li, Y.; Wang, W.; Zhang, Z. Route Control Strategies for Autonomous Vehicles Exiting to Off-Ramps. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3104–3116. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. General Lane-Changing Model MOBIL for Car-Following Models. Transp. Res. Rec. J. Transp. Res. Board 2007, 1999, 86–94. [Google Scholar] [CrossRef] [Green Version]
- Toledo, T.; Choudhury, C.F.; Ben-Akiva, M.E. Lane-changing model with explicit target lane choice. Transp. Res. Rec. 2005, 1934, 157–165. [Google Scholar] [CrossRef]
- Shamir, T. How Should an Autonomous Vehicle Overtake a Slower Moving Vehicle: Design and Analysis of an Optimal Trajectory. IEEE Trans. Autom. Control 2004, 49, 607–610. [Google Scholar] [CrossRef]
- Yang, D.; Zheng, S.; Wen, C.; Jin, P.J.; Ran, B. A dynamic lane-changing trajectory planning model for automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 228–247. [Google Scholar] [CrossRef]
- Dong, C.; Wang, H.; Li, Y.; Shi, X.; Ni, D.; Wang, W. Application of machine learning algorithms in lane-changing model for intelligent vehicles exiting to off-ramp. Transp. A Transp. Sci. 2021, 17, 124–150. [Google Scholar] [CrossRef]
- Mahajan, V.; Katrakazas, C.; Antoniou, C. Prediction of Lane-Changing Maneuvers with Automatic Labeling and Deep Learning. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 336–347. [Google Scholar] [CrossRef]
- Das, A.; Khan, N.; Ahmed, M.M. Detecting lane change maneuvers using SHRP2 naturalistic driving data: A comparative study machine learning techniques. Accid. Anal. Prev. 2020, 142, 105578. [Google Scholar] [CrossRef]
- Xie, D.-F.; Fang, Z.-Z.; Jia, B.; He, Z. A data-driven lane-changing model based on deep learning. Transp. Res. Part C Emerg. Technol. 2019, 106, 41–60. [Google Scholar] [CrossRef]
- Minderhoud, M.M.; Bovy, P.H. Extended time-to-collision measures for road traffic safety assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar] [CrossRef]
- Li, Y.; Tu, Y.; Fan, Q.; Dong, C.; Wang, W. Influence of cyber-attacks on longitudinal safety of connected and automated vehicles. Accid. Anal. Prev. 2018, 121, 148–156. [Google Scholar] [CrossRef]
- NGSIM—Next Generation SIMulation. 2013. Available online: https://ops.fhwa.dot.gov/trafficanalysistools/ngsim.htm (accessed on 15 July 2013).
- Oh, C.; Park, S.; Ritchie, S. A method for identifying rear-end collision risks using inductive loop detectors. Accid. Anal. Prev. 2006, 38, 295–301. [Google Scholar] [CrossRef]
- Bi, H.; Mao, T.; Wang, Z.; Deng, Z. A data-driven model for lane-changing in traffic simulation. Symp. Comput. Animat. 2016, 149–158. [Google Scholar]
- Sewall, J.; Berg, J.V.D.; Lin, M.C.; Manocha, D. Virtualized Traffic: Reconstructing Traffic Flows from Discrete Spatiotemporal Data. IEEE Trans. Vis. Comput. Graph. 2010, 17, 26–37. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Kan, X.D.; Shladover, S.E.; Lu, X.-Y.; Ferlis, R.E. Modeling impacts of Cooperative Adaptive Cruise Control on mixed traffic flow in multi-lane freeway facilities. Transp. Res. Part C Emerg. Technol. 2018, 95, 261–279. [Google Scholar] [CrossRef]
- Ioannou, P.; Stefanovic, M. Evaluation of ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis. IEEE Trans. Intell. Transp. Syst. 2005, 6, 79–89. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Safety Level | MRCRI Range | Safety Level | MRCRI Range | Safety Level | MRCRI Range |
|---|---|---|---|---|---|
| A | [0, 0.251] | B | (0.251, 0.306] | C | (0.306, 0.355] |
| D | (0.355, 0.416] | E | (0.416, 0.510] | F | (0.510, 1] |
| Groups | Backward Gap | Adjacent Gap | Forward Gap | Total |
|---|---|---|---|---|
| Ground truth traffic | 30% | 49% | 21% | 100% |
| Bi et al.’s method | 17% | 56% | 27% | 100% |
| Sewall et al.’s method | 0% | 100% | 0% | 100% |
| Our method | 23% | 51% | 26% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, C.; Liu, Y.; Wang, H.; Ni, D.; Li, Y. Modeling Lane-Changing Behavior Based on a Joint Neural Network. Machines 2022, 10, 109. https://doi.org/10.3390/machines10020109
Dong C, Liu Y, Wang H, Ni D, Li Y. Modeling Lane-Changing Behavior Based on a Joint Neural Network. Machines. 2022; 10(2):109. https://doi.org/10.3390/machines10020109
Chicago/Turabian StyleDong, Changyin, Yunjie Liu, Hao Wang, Daiheng Ni, and Ye Li. 2022. "Modeling Lane-Changing Behavior Based on a Joint Neural Network" Machines 10, no. 2: 109. https://doi.org/10.3390/machines10020109
APA StyleDong, C., Liu, Y., Wang, H., Ni, D., & Li, Y. (2022). Modeling Lane-Changing Behavior Based on a Joint Neural Network. Machines, 10(2), 109. https://doi.org/10.3390/machines10020109