
A Review of Sensors Used on Fabric-Handling Robots




Abstract
1. Introduction
2. Materials and Methods
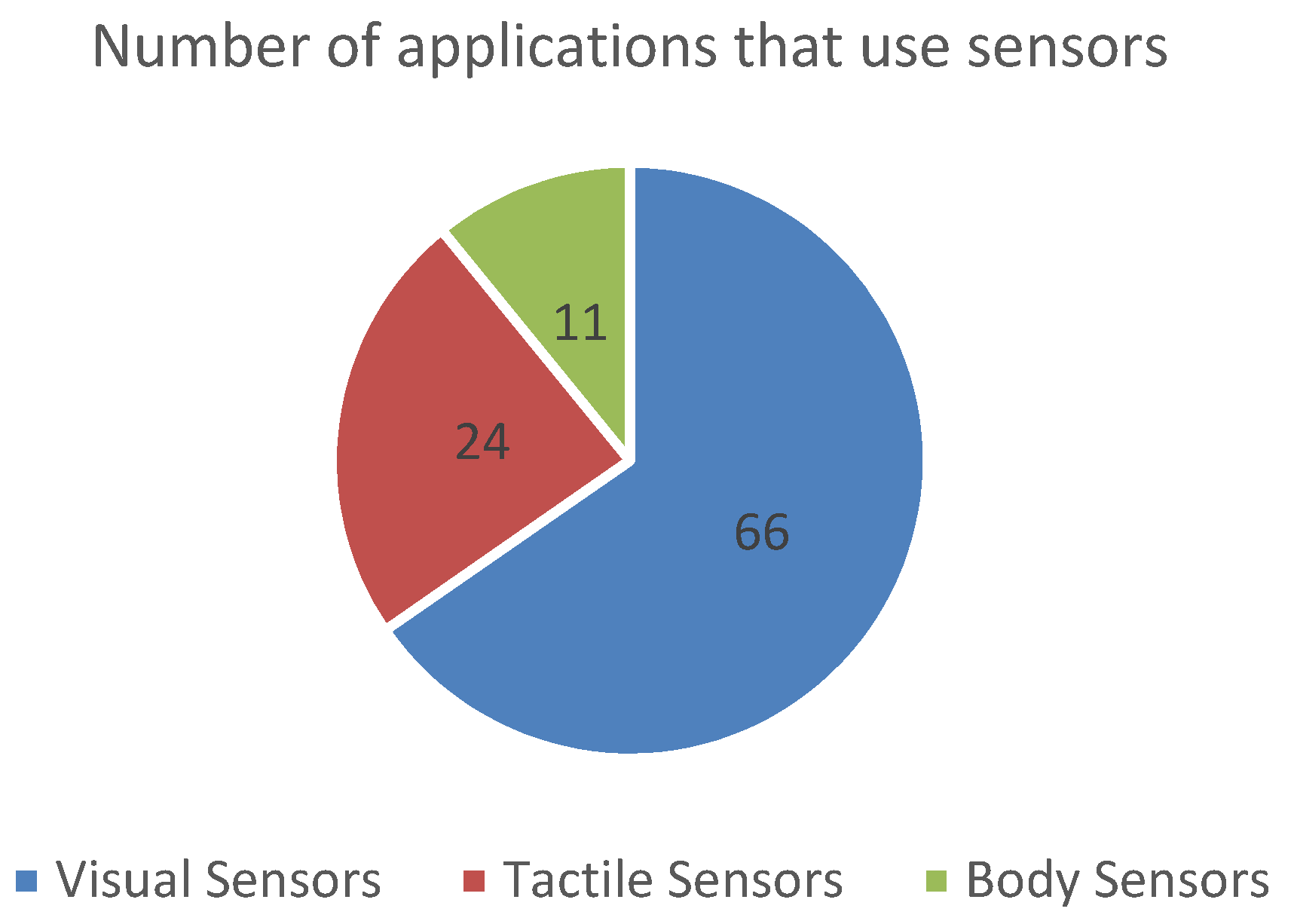
3. Sensor Analysis
3.1. Working Principle
3.1.1. Visual Sensors
- Binocular stereo, where images from two cameras (or one moving camera) are combined;
- Trinocular stereo, where three cameras are used, and more information can be provided, as all three dimensions can be projected;
- Longitudinal stereo, where consecutive views are captured along the optical axes, a method used in vehicle guidance.
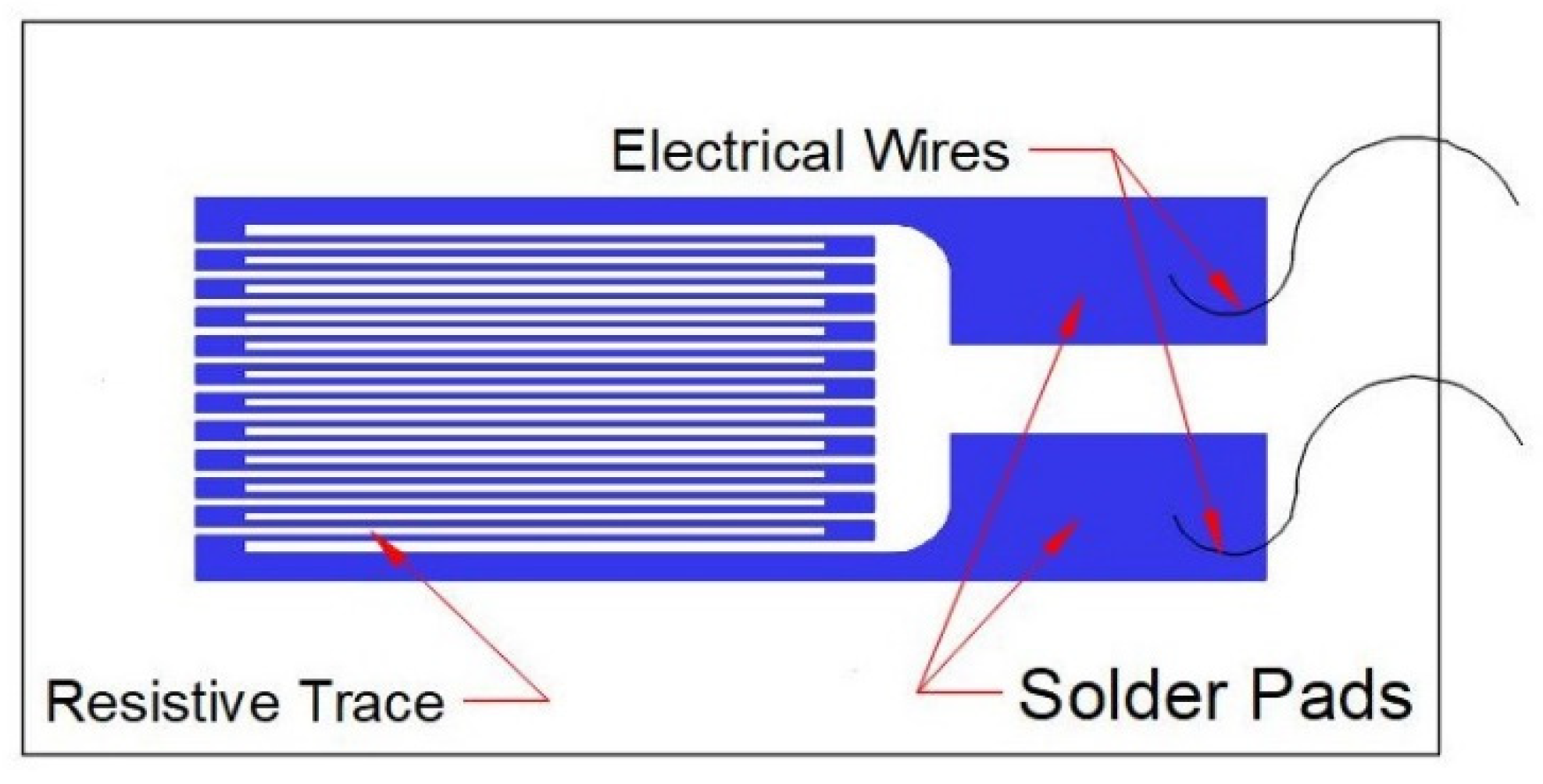
3.1.2. Tactile Sensors
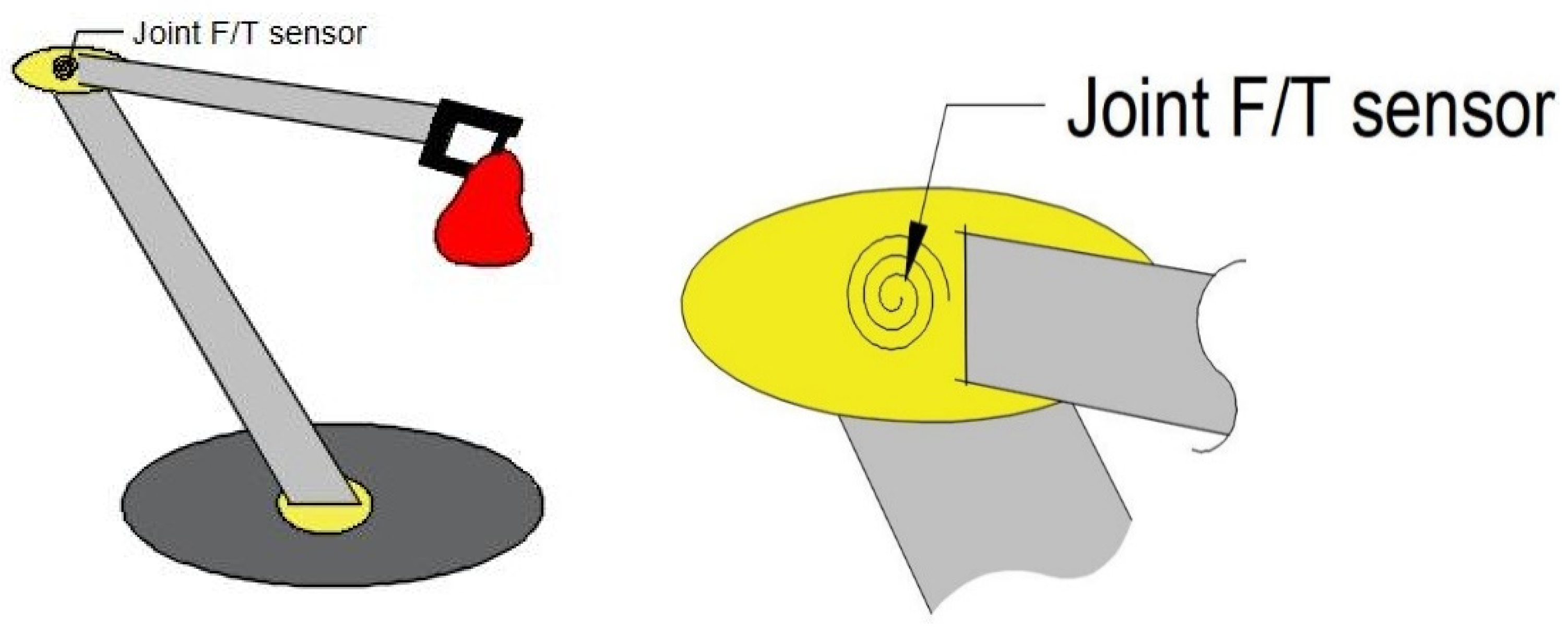
3.1.3. Body Sensors
3.1.4. Wearable Sensors
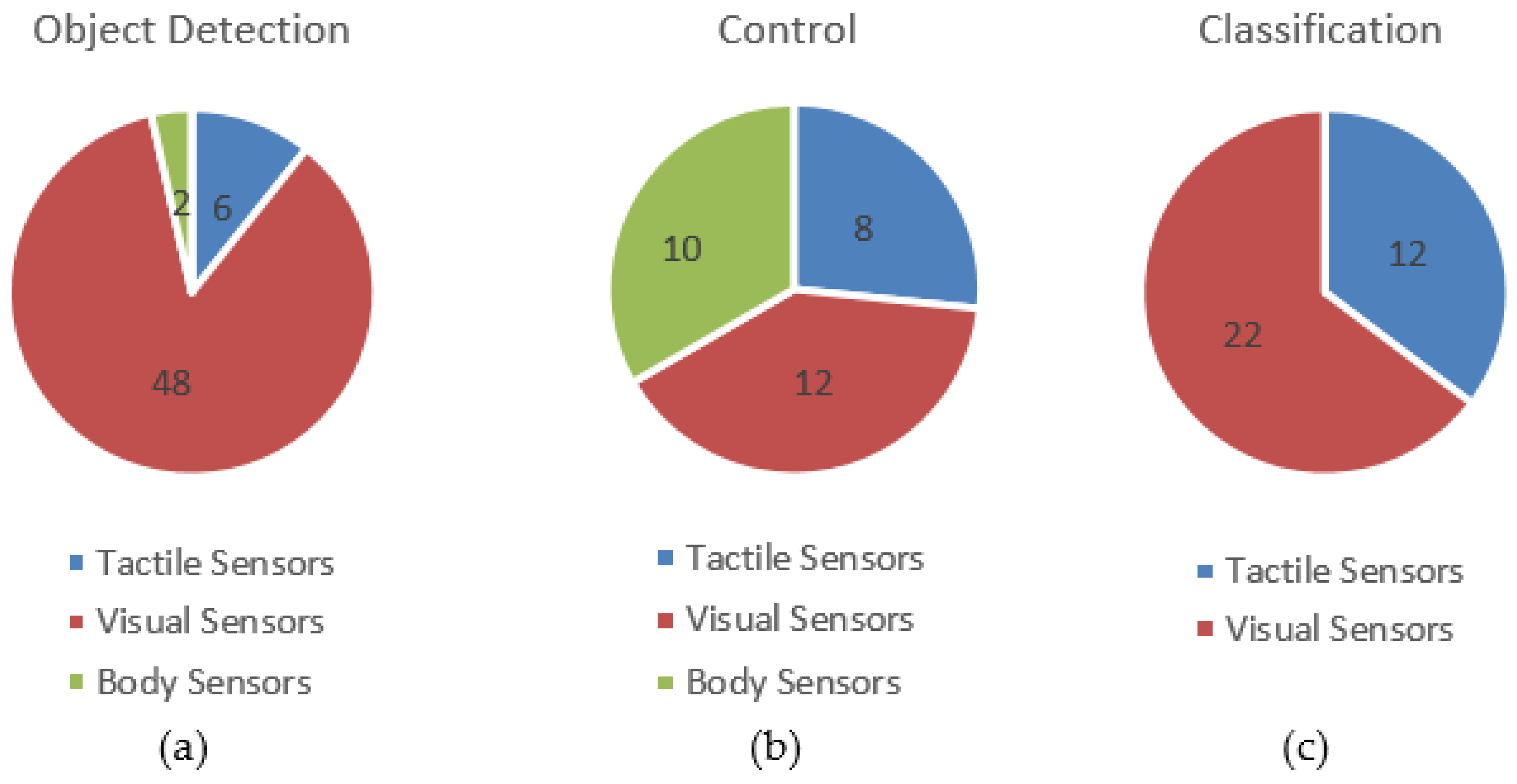
3.2. Data Processing and a Reference to the Type of Manipulated Object
3.2.1. Object Detection
3.2.2. Control
3.2.3. Object Classification
4. Discussion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Task | |||
|---|---|---|---|---|
| Object Detection | Control | Classifying | ||
| Visual Sensors |  1D 1D | [22,23,25,26,27,28,29,87,88,95] | ||
 2D 2D | [7,9,23,24,26,27,28,31,33,35,36,86,89,92,96,100] | [33,34,90,98] | [7,32,36,37,52,89,91,92] | |
 3D 3D | [3,5,6,8,10,11,12,15,40,41,42,69,70,71,78,80,81,83,84,85,92,93,94,97,99,101] | [5,6,14,15,16,17,74,99] | [4,41,42,43,52,69,77,78,79,80,81,82,92,94,97,101] | |
| Tactile Sensors |  | [6,28,47,48,68,86] | [14,18,23,32,34,35,74,86] | [32,49,51,52,53,54,55,56,57,58,59,70] |
| Body Sensors |  | [48,61] | [13,15,27,29,35,60,61,75,87,100] | |
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Seesselberg, H.A. A Challenge to Develop Fully Automated Garment Manufacturing. In Sensory Robotics for the Handling of Limp Materials; Springer: Berlin/Heidelberg, Germany, 1990; pp. 53–67. [Google Scholar]
- Koustoumpardis, P.N.; Aspragathos, N.A. A Review of Gripping Devices for Fabric Handling. In Proceedings of the International Conference on Intelligent Manipulation and Grasping IMG04, Genova, Italy, 1–2 July 2004; pp. 229–234. [Google Scholar]
- Seita, D.; Jamali, N.; Laskey, M.; Kumar Tanwani, A.; Berenstein, R.; Baskaran, P.; Iba, S.; Canny, J.; Goldberg, K. Deep Transfer Learning of Pick Points on Fabric for Robot Bed-Making. arXiv 2018, arXiv:1809.09810. [Google Scholar]
- Osawa, F.; Seki, H.; Kamiya, Y. Unfolding of Massive Laundry and Classification Types by Dual Manipulator. J. Adv. Comput. Intell. Intell. Inform. 2007, 11, 457–463. [Google Scholar] [CrossRef]
- Kita, Y.; Kanehiro, F.; Ueshiba, T.; Kita, N. Clothes handling based on recognition by strategic observation. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 53–58. [Google Scholar]
- Bersch, C.; Pitzer, B.; Kammel, S. Bimanual Robotic Cloth Manipulation for Laundry Folding. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1413–1419. [Google Scholar]
- Miller, S.; Berg, J.V.D.; Fritz, M.; Darrell, T.; Goldberg, K.; Abbeel, P. A geometric approach to robotic laundry folding. Int. J. Robot. Res. 2011, 31, 249–267. [Google Scholar] [CrossRef]
- Maitin-Shepard, J.; Cusumano-Towner, M.; Lei, J.; Abbeel, P. Cloth grasp point detection based on multiple-view geometric cues with application to robotic towel folding. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2308–2315. [Google Scholar]
- Osawa, F.; Seki, H.; Kamiya, Y. Clothes Folding Task by Tool-Using Robot. J. Robot. Mechatron. 2006, 18, 618–625. [Google Scholar] [CrossRef]
- Yamazaki, K.; Inaba, M. A Cloth Detection Method Based on Image Wrinkle Feature for Daily Assistive Robots. In Proceedings of the MVA2009 IAPR International Conference on Machine Vision Applications, Yokohama, Japan, 20–22 May 2009; pp. 366–369. Available online: http://www.mva-org.jp/Proceedings/2009CD/papers/11-03.pdf (accessed on 19 April 2021).
- Twardon, L.; Ritter, H. Interaction skills for a coat-check robot: Identifying and handling the boundary components of clothes. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3682–3688. [Google Scholar]
- Li, Y.; Hu, X.; Xu, D.; Yue, Y.; Grinspun, E.; Allen, P.K. Multi-Sensor Surface Analysis for Robotic Ironing. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5670–5676. [Google Scholar] [CrossRef]
- Yu, W.; Kapusta, A.; Tan, J.; Kemp, C.C.; Turk, G.; Liu, C.K. Haptic Simulation for Robot-Assisted Dressing. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 6044–6051. [Google Scholar]
- Kruse, D.; Radke, R.J.; Wen, J.T. Collaborative Human-Robot Manipulation of Highly Deformable Materials. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 3782–3787. [Google Scholar]
- Yamazaki, K.; Oya, R.; Nagahama, K.; Okada, K.; Inaba, M. Bottom Dressing by a Life-Sized Humanoid Robot Provided Failure Detection and Recovery Functions. In Proceedings of the 2014 IEEE/SICE International Symposium on System Integration, Tokyo, Japan, 13–15 December 2014; pp. 564–570. [Google Scholar]
- Joshi, R.P.; Koganti, N.; Shibata, T. A framework for robotic clothing assistance by imitation learning. Adv. Robot. 2019, 33, 1156–1174. [Google Scholar] [CrossRef]
- Tamei, T.; Matsubara, T.; Rai, A.; Shibata, T. Reinforcement learning of clothing assistance with a dual-arm robot. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 733–738. [Google Scholar]
- Erickson, Z.; Clever, H.M.; Turk, G.; Liu, C.K.; Kemp, C.C. Deep Haptic Model Predictive Control for Robot-Assisted Dressing. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar] [CrossRef]
- King, C.H.; Chen, T.L.; Jain, A.; Kemp, C.C. Towards an Assistive Robot That Autonomously Performs Bed Baths for Patient Hygiene. In Proceedings of the IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 319–324. [Google Scholar] [CrossRef]
- Clothes Perception and Manipulation (CloPeMa)—HOME—CloPeMa—Clothes Perception and Manipulation. Available online: http://clopemaweb.felk.cvut.cz/clothes-perception-and-manipulation-clopema-home/ (accessed on 17 May 2021).
- Koustoumpardis, P.N.; Aspragathos, N. Control and Sensor Integration in Designing Grippers for Handling Fabrics. In Proceedings of the 8th Internat. Workshop on RAAD’99, Munich, Germany, 17–19 June 1999; pp. 291–296. [Google Scholar]
- Balaguer, B.; Carpin, S. Combining Imitation and Reinforcement Learning to Fold Deformable Planar Objects. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1405–1412. [Google Scholar]
- Sahari, K.S.M.; Seki, H.; Kamiya, Y.; Hikizu, M. Clothes Manipulation by Robot Grippers with Roller Fingertips. Adv. Robot. 2010, 24, 139–158. [Google Scholar] [CrossRef]
- Taylor, P.M.; Taylor, G.E. Sensory robotic assembly of apparel at Hull University. J. Intell. Robot. Syst. 1992, 6, 81–94. [Google Scholar] [CrossRef]
- Kolluru, R.; Valavanis, K.P.; Steward, A.; Sonnier, M.J. A flat surface robotic gripper for handling limp material. IEEE Robot. Autom. Mag. 1995, 2, 19–26. [Google Scholar] [CrossRef]
- Kolluru, R.; Valavanis, K.P.; Hebert, T.M. A robotic gripper system for limp material manipulation: Modeling, analysis and performance evaluation. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Albuquerque, NM, USA, 25 April 1997; Volume 1, pp. 310–316. [Google Scholar]
- Hebert, T.; Valavanis, K.; Kolluru, R. A robotic gripper system for limp material manipulation: Hardware and software development and integration. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Albuquerque, NM, USA, 25 April 1997; Volume 1, pp. 15–21. [Google Scholar]
- Doulgeri, Z.; Fahantidis, N. Picking up flexible pieces out of a bundle. IEEE Robot. Autom. Mag. 2002, 9, 9–19. [Google Scholar] [CrossRef]
- Schrimpf, J.; Wetterwald, L.E. Experiments towards automated sewing with a multi-robot system. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 5258–5263. [Google Scholar]
- Kelley, R.B. 2D Vision Techniques for the Handling of Limp Materials. In Sensory Robotics for the Handling of Limp Materials; Springer Science and Business Media LLC: Cham, Switzerland, 1990; pp. 141–157. [Google Scholar]
- Bergstrom, N.; Ek, C.H.; Kragic, D.; Yamakawa, Y.; Senoo, T.; Ishikawa, M. On-line learning of temporal state models for flexible objects. In Proceedings of the 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), Osaka, Japan, 29 November–1 December 2012; pp. 712–718. [Google Scholar]
- Le, T.-H.-L.; Jilich, M.; Landini, A.; Zoppi, M.; Zlatanov, D.; Molfino, R. On the Development of a Specialized Flexible Gripper for Garment Handling. J. Autom. Control Eng. 2013, 1, 255–259. [Google Scholar] [CrossRef]
- Yamazaki, K.; Oya, R.; Nagahama, K.; Inaba, M. A Method of State Recognition of Dressing Clothes Based on Dynamic State Matching. In Proceedings of the 2013 IEEE/SICE International Symposium on System Integration, Kobe, Japan, 15–17 December 2013; pp. 406–411. [Google Scholar]
- Gershon, D.; Porat, I. Vision servo control of a robotic sewing system. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 1830–1835. [Google Scholar]
- Paraschidis, K.; Fahantidis, N.; Vassiliadis, V.; Petridis, V.; Doulgeri, Z.; Petrou, L.; Hasapis, G. A robotic system for handling textile materials. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 2, pp. 1769–1774. [Google Scholar]
- Yamazaki, K.; Inaba, M. Clothing Classification Using Image Features Derived from Clothing Fabrics, Wrinkles and Cloth Overlaps. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2710–2717. [Google Scholar]
- Bouman, K.L.; Xiao, B.; Battaglia, P.; Freeman, W.T. Estimating the Material Properties of Fabric from Video. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013. [Google Scholar] [CrossRef]
- Shih, B.; Shah, D.; Li, J.; Thuruthel, T.G.; Park, Y.-L.; Iida, F.; Bao, Z.; Kramer-Bottiglio, R.; Tolley, M.T. Electronic skins and machine learning for intelligent soft robots. Sci. Robot. 2020, 5, 9239. [Google Scholar] [CrossRef] [PubMed]
- Domey, J.; Rioux, M.; Blais, F. 3-D Sensing for Robot Vision. In Sensory Robotics for the Handling of Limp Materials; Taylor, P.M., Ed.; Springer: Berlin/Heidelberg, Germany, 1990; pp. 159–192. [Google Scholar]
- Triantafyllou, D.; Koustoumpardis, P.; Aspragathos, N. Type independent hierarchical analysis for the recognition of folded garments’ configuration. Intell. Serv. Robot. 2021, 14, 427–444. [Google Scholar] [CrossRef]
- Doumanoglou, A.; Kargakos, A.; Kim, T.-K.; Malassiotis, S. Autonomous active recognition and unfolding of clothes using random decision forests and probabilistic planning. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 987–993. [Google Scholar]
- Martínez, L.; Ruiz-Del-Solar, J.; Sun, L.; Siebert, J.P.; Aragon-Camarasa, G. Continuous perception for deformable objects understanding. Robot. Auton. Syst. 2019, 118, 220–230. [Google Scholar] [CrossRef]
- Gabas, A.; Corona, E.; Alenyà, G.; Torras, C. Robot-Aided Cloth Classification Using Depth Information and CNNs. In Proceedings of the International Conference on Articulated Motion and Deformable Objects, Palma de Mallorca, Spain, 13–15 July 2016; Springer: Cham, Switzerland; pp. 16–23. [Google Scholar]
- Paul, F.W.; Torgerson, E. Tactile Sensors: Application Assessment for Robotic Handling of Limp Materials. In Sensory Robotics for the Handling of Limp Materials; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 1990; pp. 227–237. [Google Scholar]
- Chathuranga, K.V.D.S.; Ho, V.A.; Hirai, S. A bio-mimetic fingertip that detects force and vibration modalities and its application to surface identification. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 575–581. [Google Scholar]
- Shih, B.; Drotman, D.; Christianson, C.; Huo, Z.; White, R.; Christensen, H.I.; Tolley, M.T. Custom soft robotic gripper sensor skins for haptic object visualization. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 494–501. [Google Scholar]
- Ono, E.; Okabe, H.; Akami, H.; Aisaka, N. Robot Hand with a Sensor for Cloth Handling. J. Text. Mach. Soc. Jpn. 1991, 37, 14–24. [Google Scholar] [CrossRef]
- Platt, R.; Permenter, F.; Pfeiffer, J. Using Bayesian Filtering to Localize Flexible Materials during Manipulation. IEEE Trans. Robot. 2011, 27, 586–598. [Google Scholar] [CrossRef]
- Jamali, N.; Sammut, C. Majority Voting: Material Classification by Tactile Sensing Using Surface Texture. IEEE Trans. Robot. 2011, 27, 508–521. [Google Scholar] [CrossRef]
- Li, S.; Zhao, H. Flexible and Stretchable Sensors for Fluidic Elastomer Actuated Soft Robots Nonlinear Dynamics and Emergent Complexity View Project. Mrs Bull. 2017, 42, 138–142. [Google Scholar] [CrossRef]
- Muhammad, H.B.; Recchiuto, C.; Oddo, C.M.; Beccai, L.; Anthony, C.J.; Adams, M.J.; Carrozza, M.C.; Ward, M.C.L. A Capacitive Tactile Sensor Array for Surface Texture Discrimination. Microelectron. Eng. 2011, 88, 1811–1813. [Google Scholar] [CrossRef]
- Kampouris, C.; Mariolis, I.; Peleka, G.; Skartados, E.; Kargakos, A.; Triantafyllou, D.; Malassiotis, S. Multi-sensorial and explorative recognition of garments and their material properties in unconstrained environment. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1656–1663. [Google Scholar]
- Khan, A.A.; Khosravi, M.; Denei, S.; Maiolino, P.; Kasprzak, W.; Mastrogiovanni, F.; Cannata, G. A Tactile-Based Fabric Learning and Classification Architecture. In Proceedings of the 2016 IEEE International Conference on Information and Automation for Sustainability (ICIAfS), Galle, Sri Lanka, 16–19 December 2016. [Google Scholar]
- De Boissieu, F.; Godin, C.; Guilhamat, B.; David CEA, D.; Serviere, C.; Baudois, D. Tactile Texture Recognition with a 3-Axial Force MEMS Integrated Artificial Finger. In Robotics: Science and Systems; Trinkle, J., Matsuoka, Y., Castellanos, J.A., Eds.; The MIT Press: Cambridge, MA, USA, 2009; pp. 49–56. [Google Scholar]
- Hu, H.; Han, Y.; Song, A.; Chen, S.; Wang, C.; Wang, Z. A Finger-Shaped Tactile Sensor for Fabric Surfaces Evaluation by 2-Dimensional Active Sliding Touch. Sensors 2014, 14, 4899–4913. [Google Scholar] [CrossRef]
- Drimus, A.; Borlum Petersen, M.; Bilberg, A. Object Texture Recognition by Dynamic Tactile Sensing Using Active Exploration. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 277–283. [Google Scholar]
- Sinapov, J.; Sukhoy, V.; Sahai, R.; Stoytchev, A. Vibrotactile Recognition and Categorization of Surfaces by a Humanoid Robot. IEEE Trans. Robot. 2011, 27, 488–497. [Google Scholar] [CrossRef]
- Chathuranga, D.S.; Hirai, S. Investigation of a Biomimetic Fingertip’s Ability to Discriminate Based on Surface Textures. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013. [Google Scholar]
- Chathuranga, D.S.; Wang, Z.; Noh, Y.; Nanayakkara, T.; Hirai, S. Robust real time material classification algorithm using soft three axis tactile sensor: Evaluation of the algorithm. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2093–2098. [Google Scholar]
- Ku, S.; Myeong, J.; Kim, H.-Y.; Park, Y.-L. Delicate Fabric Handling Using a Soft Robotic Gripper with Embedded Microneedles. IEEE Robot. Autom. Lett. 2020, 5, 4852–4858. [Google Scholar] [CrossRef]
- Kondratas, A. Robotic Gripping Device for Garment Handling Operations and Its Adaptive Control. Fibres Text. East. Eur. 2005, 13, 84–89. [Google Scholar]
- Ejupi, A.; Ferrone, A.; Menon, C. Quantification of Textile-Based Stretch Sensors Using Machine Learning: An Exploratory Study. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Enschede, The Netherlands, 26–29 August 2018; pp. 254–259. [Google Scholar] [CrossRef]
- Cermak, D. How Artificial Intelligence Is Transforming the Textile Industry. Available online: https://www.iotforall.com/how-artificial-intelligence-is-transforming-the-textile-industry (accessed on 3 September 2021).
- Bahadir, S.K.; Koncar, V.; Kalaoglu, F. Wearable obstacle detection system fully integrated to textile structures for visually impaired people. Sens. Actuators A Phys. 2012, 179, 297–311. [Google Scholar] [CrossRef]
- Vu, C.C.; Kim, J. Human Motion Recognition by Textile Sensors Based on Machine Learning Algorithms. Sensors 2018, 18, 3109. [Google Scholar] [CrossRef]
- Pyka, W.; Jedrzejowski, M.; Chudy, M.; Krafczyk, W.; Tokarczyk, O.; Dziezok, M.; Bzymek, A.; Bysko, S.; Blachowicz, T.; Ehrmann, A. On the Use of Textile Materials in Robotics. J. Eng. Fibers Fabr. 2020, 15. [Google Scholar] [CrossRef]
- Xiong, J.; Chen, J.; Lee, P.S. Functional Fibers and Fabrics for Soft Robotics, Wearables, and Human–Robot Interface. Adv. Mater. 2021, 33, e2002640. [Google Scholar] [CrossRef]
- Koustoumpardis, P.N.; Nastos, K.X.; Aspragathos, N.A. Underactuated 3-Finger Robotic Gripper for Grasping Fabrics. In Proceedings of the 2014 23rd International Conference on Robotics in Alpe-Adria-Danube Region (RAAD), Smolenice, Slovakia, 3–5 September 2014. [Google Scholar]
- Ramisa, A.; Alenya, G.; Moreno-Noguer, F.; Torras, C. Learning RGB-D descriptors of garment parts for informed robot grasping. Eng. Appl. Artif. Intell. 2014, 35, 246–258. [Google Scholar] [CrossRef]
- Yuan, W.; Mo, Y.; Wang, S.; Adelson, E.H. Active Clothing Material Perception Using Tactile Sensing and Deep Learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Monso, P.; Alenya, G.; Torras, C. POMDP approach to robotized clothes separation. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1324–1329. [Google Scholar]
- Huang, S.H.; Pan, J.; Mulcaire, G.; Abbeel, P. Leveraging appearance priors in non-rigid registration, with application to manipulation of deformable objects. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 878–885. [Google Scholar]
- A Katkar, S.; Karikatti, G.; Ladawa, S. Bvbcet Material Handling Robot with Obstacle Detection. Int. J. Eng. Res. 2015, V4, 560–566. [Google Scholar] [CrossRef]
- Li, Y.; Yue, Y.; Xu, D.; Grinspun, E.; Allen, P.K. Folding deformable objects using predictive simulation and trajectory optimization. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 6000–6006. [Google Scholar]
- Dadiotis, I.D.; Sakellariou, J.S.; Koustoumpardis, P.N. Development of a Low-Cost Force Sensory System for Force Control via Small Grippers of Cooperative Mobile Robots Used for Fabric Manipulation. Adv. Mech. Mach. Sci. 2021, 102, 47–58. [Google Scholar] [CrossRef]
- ISO/TS 15066:2016; Robots and Robotic Devices-Collaborative Robots. International Organization for Standardization: Geneva, Switzerland, 2016.
- Li, Y.; Chen, C.-F.; Allen, P.K. Recognition of deformable object category and pose. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5558–5564. [Google Scholar]
- Li, Y.; Wang, Y.; Yue, Y.; Xu, D.; Case, M.; Chang, S.-F.; Grinspun, E.; Allen, P.K. Model-Driven Feedforward Prediction for Manipulation of Deformable Objects. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1621–1638. [Google Scholar] [CrossRef]
- Thewsuwan, S.; Horio, K. Texture-Based Features for Clothing Classification via Graph-Based Representation. J. Signal Process. 2018, 22, 299–305. [Google Scholar] [CrossRef]
- Corona, E.; Alenya, G.; Gabas, A.; Torras, C. Active garment recognition and target grasping point detection using deep learing. Pattern Recognit. 2018, 74, 629–641. [Google Scholar] [CrossRef]
- Stria, J.; Prusa, D.; Hlavac, V.; Wagner, L.; Petrik, V.; Krsek, P.; Smutny, V. Garment perception and its folding using a dual-arm robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 61–67. [Google Scholar]
- Molfino, R.; Zoppi, M.; Cepolina, F.; Yousef, J.; Cepolina, E.E. Design of a Hyper-Flexible Cell for Handling 3D Carbon Fiber Fabric. Recent Adv. Mech. Eng. Mech. 2014, 165, 165–170. [Google Scholar]
- Willimon, B.; Birchfield, S.; Walker, I. Model for Unfolding Laundry Using Interactive Perception. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4871–4876. [Google Scholar] [CrossRef]
- Shibata, M.; Ota, T.; Hirai, S. Wiping Motion for Deformable Object Handling. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 134–139. [Google Scholar]
- Ramisa, A.; Alenyà, G.; Moreno-Noguer, F.; Torras, C. Using Depth and Appearance Features for Informed Robot Grasping of Highly Wrinkled Clothes. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1703–1708. [Google Scholar]
- Ono, E.; Ichijo, H.; Aisaka, N. Flexible Robotic Hand for Handling Fabric Pieces in Garment Manufacture. Int. J. Cloth. Sci. Technol. 1992, 4, 16–23. [Google Scholar] [CrossRef]
- Potluri, P.; Atkinson, J.; Porat, I. A robotic flexible test system (FTS) for fabrics. Mechatronics 1995, 5, 245–278. [Google Scholar] [CrossRef]
- Seliger, G.; Gutsche, C.; Hsieh, L.-H. Process Planning and Robotic Assembly System Design for Technical Textile Fabrics. CIRP Ann. 1992, 41, 33–36. [Google Scholar] [CrossRef]
- Hamajima, K.; Kakikura, M. Planning strategy for task of unfolding clothes. Robot. Auton. Syst. 2000, 32, 145–152. [Google Scholar] [CrossRef]
- Buckingham, R.; Newell, G. Automating the manufacture of composite broadgoods. Compos. Part A Appl. Sci. Manuf. 1996, 27, 191–200. [Google Scholar] [CrossRef]
- Cusumano-Towner, M.; Singh, A.; Miller, S.; O’Brien, J.F.; Abbeel, P. Bringing clothing into desired configurations with limited perception. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Willimon, B.; Walker, I.; Birchfield, S. Classification of Clothing Using Midlevel Layers. ISRN Robot. 2013, 2013, 1–17. [Google Scholar] [CrossRef]
- Kita, Y.; Saito, F.; Kita, N. A deformable model driven visual method for handling clothes. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3889–3895. [Google Scholar]
- Willimon, B.; Birchfield, S.; Walker, I. Classification of Clothing Using Interactive Perception. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1862–1868. [Google Scholar] [CrossRef]
- Potluri, P.; Atkinson, J. Automated manufacture of composites: Handling, measurement of properties and lay-up simulations. Compos. Part A Appl. Sci. Manuf. 2003, 34, 493–501. [Google Scholar] [CrossRef]
- Triantafyllou, D.; Aspragathos, N.A. A Vision System for the Unfolding of Highly Non-Rigid Objects on a Table by One Manipulator. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2011; pp. 509–519. [Google Scholar] [CrossRef]
- Attayyab Khan, A.; Iqbal, J.; Rasheed, T. Feature Extraction of Garments Based on Gaussian Mixture for Autonomous Robotic Manipulation. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017. [Google Scholar] [CrossRef]
- Brown, P.R.; Buchanan, D.R.; Clapp, T.G. Large-deflexion Bending of Woven Fabric for Automated Material-handling. J. Text. Inst. 1990, 81, 1–14. [Google Scholar] [CrossRef]
- Sun, L.; Aragon-Camarasa, G.; Rogers, S.; Siebert, J.P. Accurate garment surface analysis using an active stereo robot head with application to dual-arm flattening. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 185–192. [Google Scholar]
- Karakerezis, A.; Ippolito, M.; Doulgeri, Z.; Rizzi, C.; Cugini, C.; Petridis, V. Robotic Handling for Flat Non-Rigid Materials. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 2–5 October 1994; pp. 937–946. [Google Scholar] [CrossRef]
- Li, Y.; Xu, D.; Yue, Y.; Wang, Y.; Chang, S.-F.; Grinspun, E.; Allen, P.K. Regrasping and unfolding of garments using predictive thin shell modeling. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1382–1388. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaltsas, P.I.; Koustoumpardis, P.N.; Nikolakopoulos, P.G. A Review of Sensors Used on Fabric-Handling Robots. Machines 2022, 10, 101. https://doi.org/10.3390/machines10020101
Kaltsas PI, Koustoumpardis PN, Nikolakopoulos PG. A Review of Sensors Used on Fabric-Handling Robots. Machines. 2022; 10(2):101. https://doi.org/10.3390/machines10020101
Chicago/Turabian StyleKaltsas, Petros I., Panagiotis N. Koustoumpardis, and Pantelis G. Nikolakopoulos. 2022. "A Review of Sensors Used on Fabric-Handling Robots" Machines 10, no. 2: 101. https://doi.org/10.3390/machines10020101
APA StyleKaltsas, P. I., Koustoumpardis, P. N., & Nikolakopoulos, P. G. (2022). A Review of Sensors Used on Fabric-Handling Robots. Machines, 10(2), 101. https://doi.org/10.3390/machines10020101