
Kinematic Optimization Design and Performance Simulation of Novel 5-DOF Parallel Machining Robots with Spatial Layout

Abstract
1. Introduction
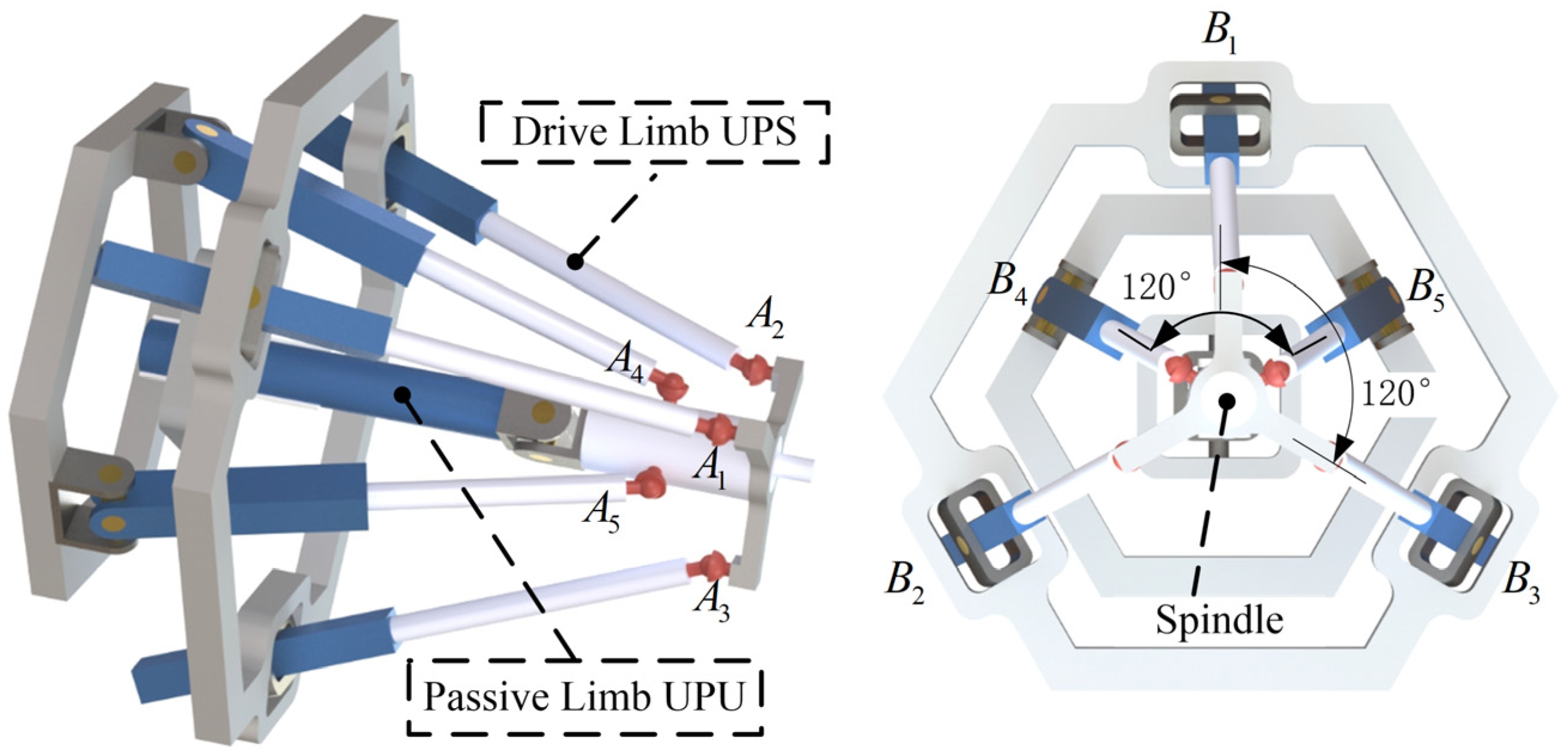
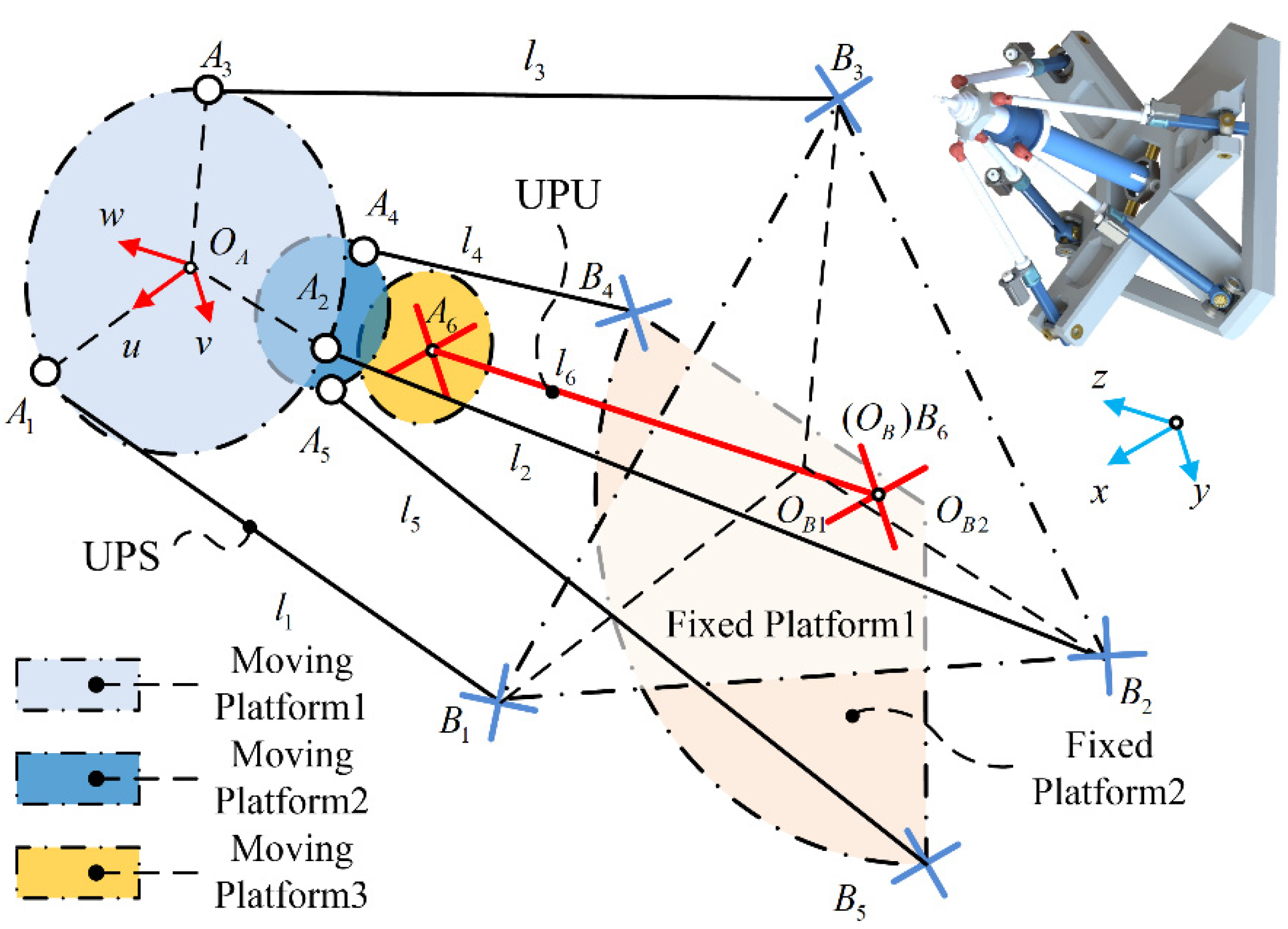
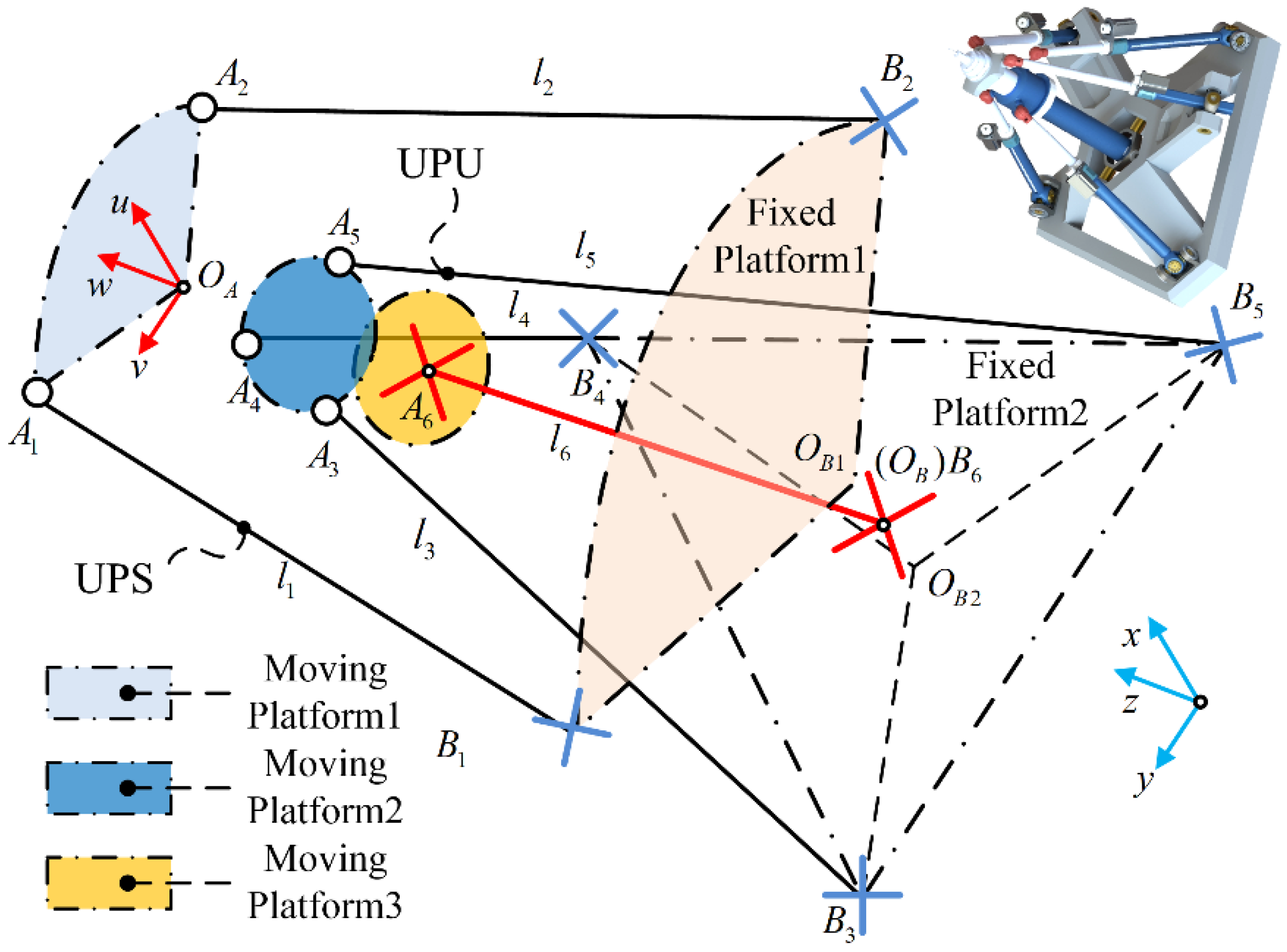
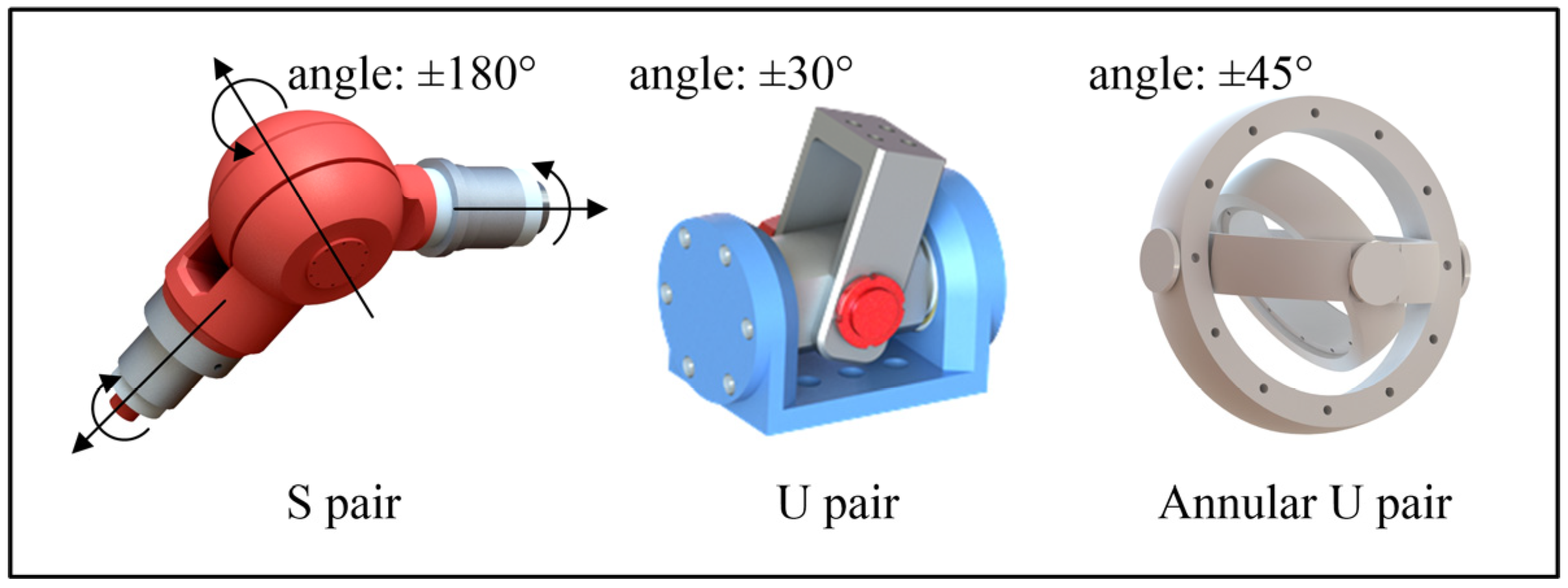
2. Topology Design and Mechanism Description
3. Kinematic Model
3.1. Inverse Kinematics
3.2. Workspace
3.3. Velocity and Force Model
4. Optimal Design
4.1. Optimization Index
4.2. Optimization Models and Algorithm
4.3. Optimization Parameters
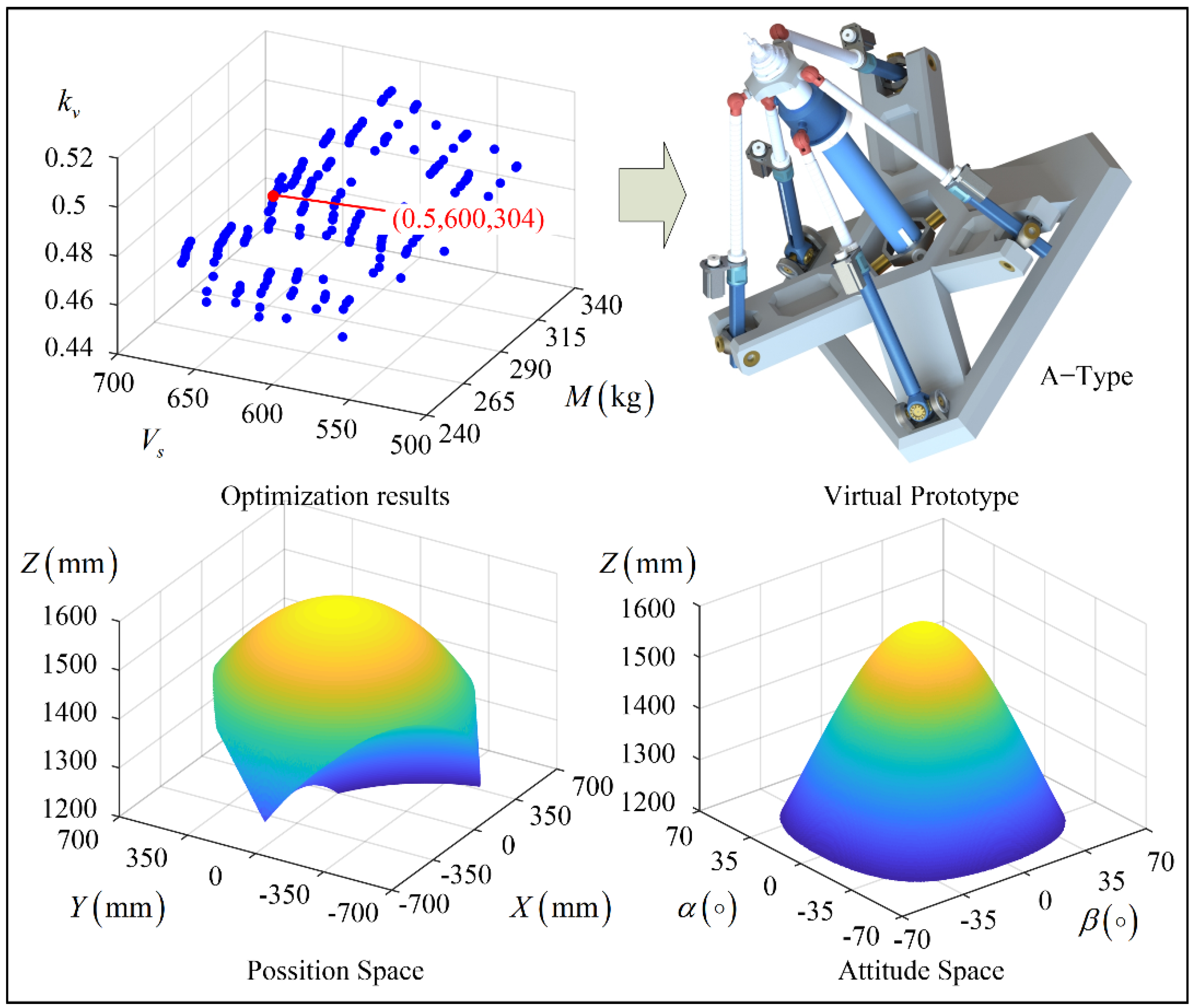
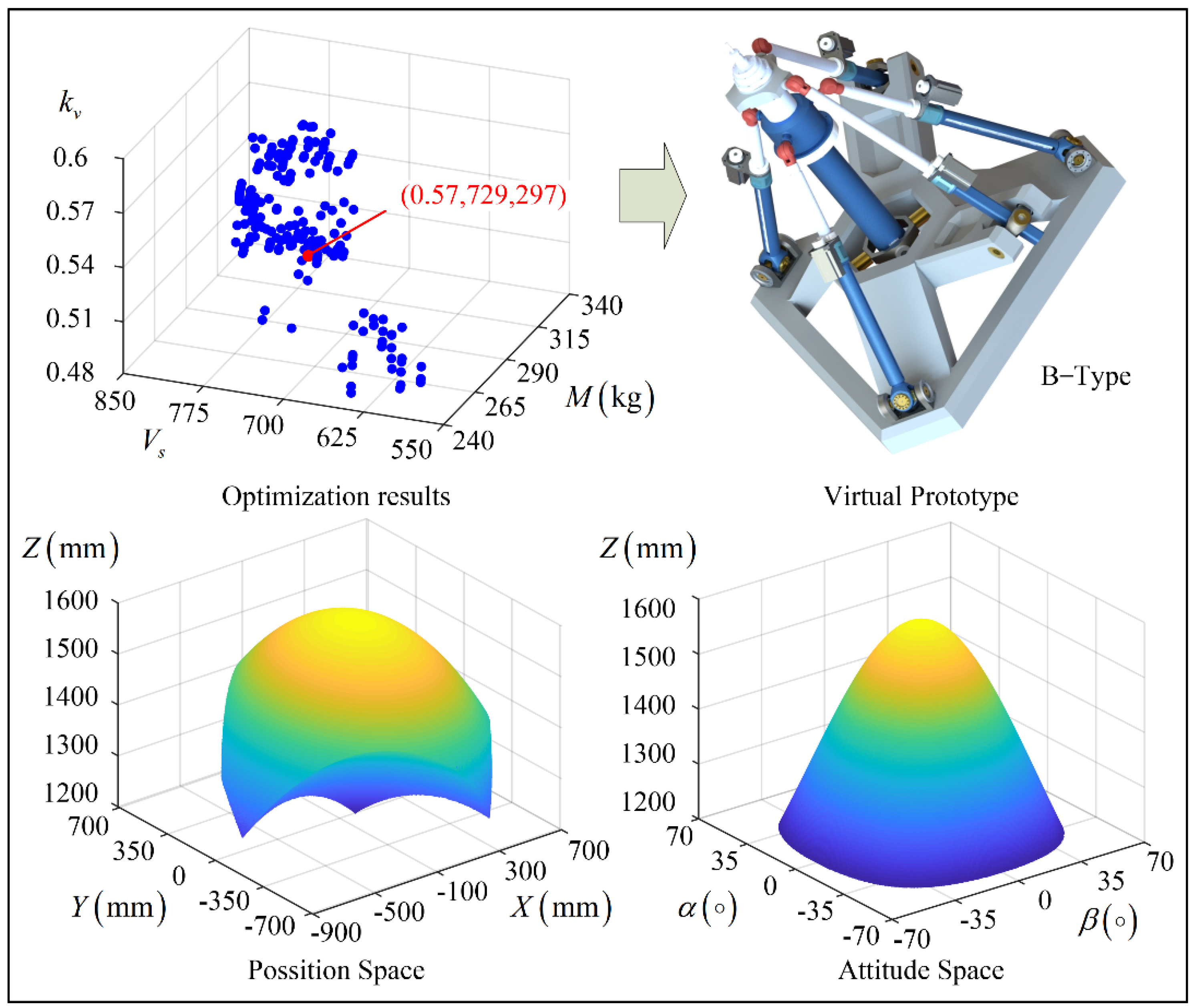
4.4. Optimization Result
5. Simulation Verification
- (1)
- Establish model: use SolidWorks to simplify the design of model structure, import the 3D model into ANSYS, define the material property as structural steel, and define the contact relationship between components according to the actual situation.
- (2)
- Grid generation: automatic grid generation is selected, with 883,175 nodes and 489,317 units in total.
- (3)
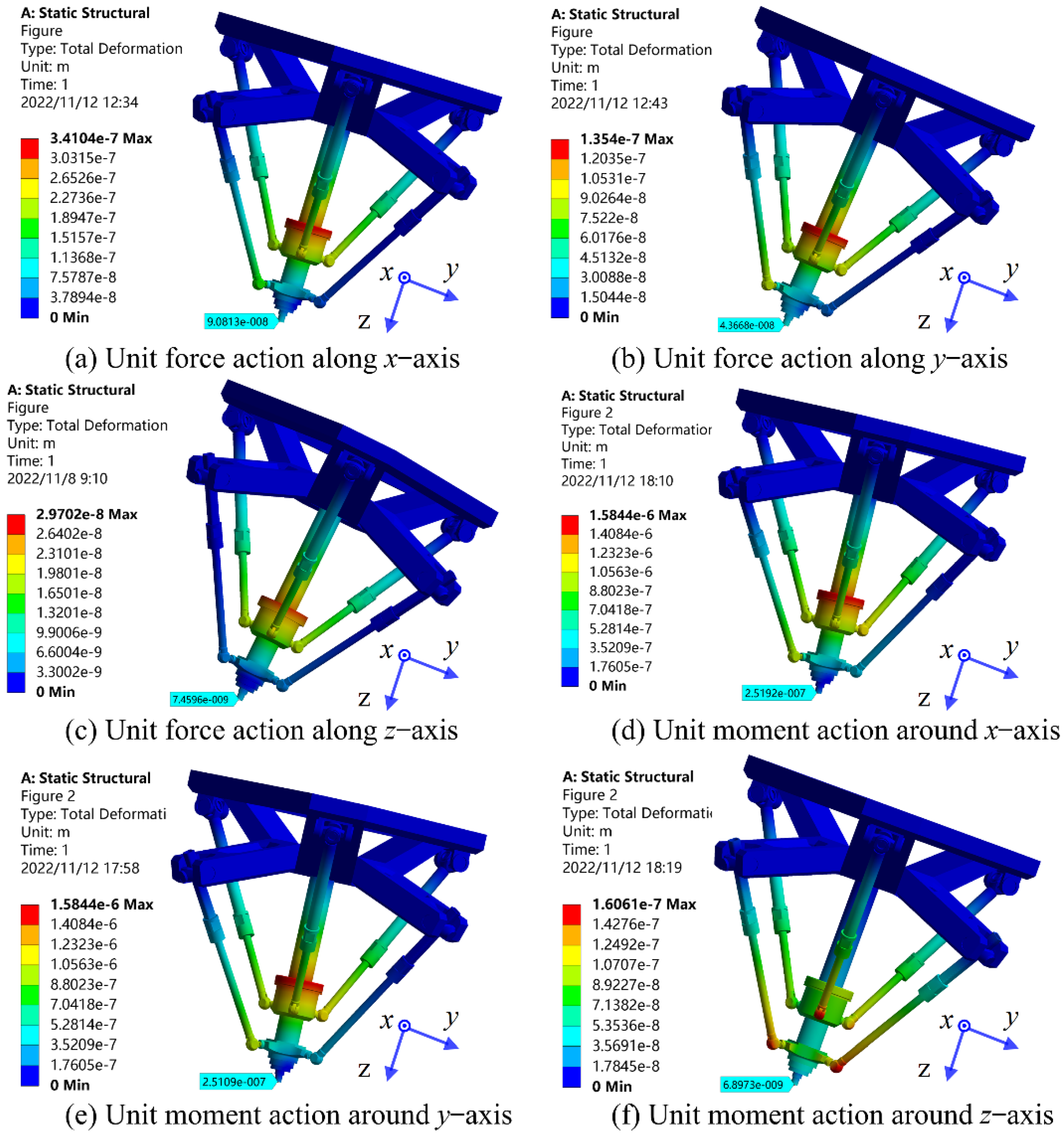
- Add boundary conditions: the bottom of the mobile platform is fixed to the ground, and a three-way unit force or moment is added at the tool center point.
- (4)
- Solution and post-processing: the total deformation of the system obtained by solution is shown in Figure 7.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| , , | Screw description of mechanism, limb and kinematic pair |
| , , , , | Axis vector of the kinematic pair |
| , , , , | Position vector of kinematic pair |
| , | Pitch angle (around A-axis) and roll angle (around B-axis) |
| , , , | Angular and linear displacements |
| , | Velocity and wrench |
References
- Zhao, X.; Tao, B.; Ding, H. Multimobile Robot Cluster System for Robot Machining of Large-Scale Workpieces. IEEE/ASME Trans. Mechatron. 2021, 27, 561–571. [Google Scholar] [CrossRef]
- Zhu, D.; Feng, X.; Xu, X.; Yang, Z.; Li, W.; Yan, S.; Ding, H. Robotic grinding of complex components: A step towards efficient and intelligent machining—Challenges, solutions, and applications. Rob. Comput. Integr. Manuf. 2020, 65, 101908. [Google Scholar] [CrossRef]
- Chen, K.; Wang, M.; Huo, X.; Wang, P.; Sun, T. Topology and dimension synchronous optimization design of 5-DoF parallel robots for in-situ machining of large-scale steel components. Mech. Mach. Theory 2023, 179, 105105. [Google Scholar] [CrossRef]
- Zou, L.; Liu, X.; Ren, X.; Huang, Y. Investigation of robotic abrasive belt grinding methods used for precision machining of aluminum blades. Int. J. Adv. Manuf. Technol. 2020, 108, 3267–3278. [Google Scholar] [CrossRef]
- Almeida, S.; Mo, J.; Bil, C.; Ding, S.; Wang, X. Conceptual Design of a High-Speed Wire EDM Robotic End-Effector Based on a Systematic Review Followed by TRIZ. Machines 2021, 9, 132. [Google Scholar] [CrossRef]
- Ye, H.; Wang, D.; Wu, J.; Yue, Y.; Zhou, Y. Forward and inverse kinematics of a 5-DOF hybrid robot for composite material machining. Robot. Comput. Manuf. 2020, 65, 101961. [Google Scholar] [CrossRef]
- Xin, S.; Peng, F.; Tang, X.; Yan, R.; Li, Z.; Wu, J. Research on the influence of robot structural mode on regenerative chatter in milling and analysis of stability boundary improvement domain. Int. J. Mach. Tools Manuf. 2022, 179, 103918. [Google Scholar] [CrossRef]
- Tao, B.; Zhao, X.; Ding, H. Mobile-robotic machining for large complex components: A review study. Sci. China Technol. Sci. 2019, 62, 1388–1400. [Google Scholar] [CrossRef]
- Bu, Y.; Liao, W.; Tian, W.; Zhang, L.; Dawei, L. Modeling and experimental investigation of Cartesian compliance characterization for drilling robot. Int. J. Adv. Manuf. Technol. 2017, 91, 3253–3264. [Google Scholar] [CrossRef]
- Meng, S.; Liu, H.; Xiao, J.; Huang, T.; Ni, Y.; Sun, S. A method for process parameter optimization of simultaneous double-sided friction stir welding using a heat transfer model. Int. J. Adv. Manuf. Technol. 2022, 121, 3747–3758. [Google Scholar] [CrossRef]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics, 2nd ed.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Merlet, J.P. Parallel Robots, 2nd ed.; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Chablat, D.; Wenger, P. Architecture optimization of a 3-DOF translational parallel mechanism for machining applications, the orthoglide. IEEE Trans. Robot. Autom. 2003, 19, 403–410. [Google Scholar] [CrossRef]
- Shi, J.; Wang, Y.; Zhang, G.; Ding, H. Optimal design of 3-DOF PKM module for friction stir welding. Int. J. Adv. Manuf. Technol. 2012, 66, 1879–1889. [Google Scholar] [CrossRef]
- Dong, C.; Liu, H.; Huang, T.; Chetwynd, D.G. A Screw Theory-Based Semi-Analytical Approach for Elastodynamics of the Tricept Robot. J. Mech. Robot. 2019, 11, 1–20. [Google Scholar] [CrossRef]
- Hu, B. Kinematically identical manipulators for the Exechon parallel manipulator and their comparison study. Mech. Mach. Theory 2016, 103, 117–137. [Google Scholar] [CrossRef]
- Dong, C.; Liu, H.; Yue, W.; Huang, T. Stiffness modeling and analysis of a novel 5-DOF hybrid robot. Mech. Mach. Theory 2018, 125, 80–93. [Google Scholar] [CrossRef]
- Xie, F.; Liu, X.-J.; Luo, X.; Wabner, M. Mobility, Singularity, and Kinematics Analyses of a Novel Spatial Parallel Mechanism. J. Mech. Robot. 2016, 8, 061022. [Google Scholar] [CrossRef]
- Xie, Z.; Xie, F.; Liu, X.-J.; Wang, J.; Mei, B. Tracking error prediction informed motion control of a parallel machine tool for high-performance machining. Int. J. Mach. Tools Manuf. 2021, 164, 103714. [Google Scholar] [CrossRef]
- Tunc, L.T.; Shaw, J. Experimental study on investigation of dynamics of hexapod robot for mobile machining. Int. J. Adv. Manuf. Technol. 2016, 84, 817–830. [Google Scholar] [CrossRef]
- Wang, C.; Fang, Y.; Guo, S. Design and Analysis of 3R2T and 3R3T Parallel Mechanisms With High Rotational Capability. J. Mech. Robot. 2015, 8, 011004. [Google Scholar] [CrossRef]
- Bi, W.; Xie, F.; Liu, X.-J.; Luo, X. Optimal design of a novel 4-degree-of-freedom parallel mechanism with flexible orientation capability. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2017, 233, 632–642. [Google Scholar] [CrossRef]
- Brahmia, A.; Kelaiaia, R.; Chemori, A.; Company, O. On Robust Mechanical Design of a PAR2 Delta-Like Parallel Kinematic Manipulator. J. Mech. Robot. 2022, 14, 011001. [Google Scholar] [CrossRef]
- Xu, L.; Chen, G.; Ye, W.; Li, Q. Design, analysis and optimization of Hex4, a new 2R1T overconstrained parallel manipulator with actuation redundancy. Robotica 2019, 37, 358–377. [Google Scholar] [CrossRef]
- Xie, F.; Liu, X.-J.; Wang, J.; Wabner, M. Kinematic Optimization of a Five Degrees-of-Freedom Spatial Parallel Mechanism With Large Orientational Workspace. J. Mech. Robot. 2017, 9, 051005. [Google Scholar] [CrossRef]
- Yao, J.; Gu, W.; Feng, Z.; Chen, L.; Xu, Y.; Zhao, Y. Dynamic analysis and driving force optimization of a 5-DOF parallel manipulator with redundant actuation. Robot. Comput. Manuf. 2017, 48, 51–58. [Google Scholar] [CrossRef]
- Sun, T.; Yang, S.; Lian, B.T. Finite and Instantaneous Screw Theory in Robotic Mechanism; Springer: Singapore, 2020; pp. 40–47. [Google Scholar]
- Lian, B.; Sun, T.; Song, Y.; Jin, Y.; Price, M. Stiffness analysis and experiment of a novel 5-DoF parallel kinematic machine considering gravitational effects. Int. J. Mach. Tools Manuf. 2015, 95, 82–96. [Google Scholar] [CrossRef]
- Qi, Y.; Sun, T.; Song, Y. Type Synthesis of Parallel Tracking Mechanism With Varied Axes by Modeling Its Finite Motions Algebraically. J. Mech. Robot. 2017, 9, 054504. [Google Scholar] [CrossRef]
- Liu, X.-J.; Chen, X.; Nahon, M. Motion/Force Constrainability Analysis of Lower-Mobility Parallel Manipulators. J. Mech. Robot. 2014, 6, 031006. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Song, Y.; Lian, B.; Sun, T.; Dong, G.; Qi, Y.; Gao, H. A Novel Five-Degree-of-Freedom Parallel Manipulator and Its Kinematic Optimization. J. Mech. Robot. 2014, 6, 041008. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 800–1300 | 800–1300 | 150–300 | 150–300 | −400–400 | −400–400 | 1000–1400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Niu, Z.; Chen, K.; Sun, T. Kinematic Optimization Design and Performance Simulation of Novel 5-DOF Parallel Machining Robots with Spatial Layout. Machines 2022, 10, 1187. https://doi.org/10.3390/machines10121187
Wang R, Niu Z, Chen K, Sun T. Kinematic Optimization Design and Performance Simulation of Novel 5-DOF Parallel Machining Robots with Spatial Layout. Machines. 2022; 10(12):1187. https://doi.org/10.3390/machines10121187
Chicago/Turabian StyleWang, Ruoyu, Zhili Niu, Kaixuan Chen, and Tao Sun. 2022. "Kinematic Optimization Design and Performance Simulation of Novel 5-DOF Parallel Machining Robots with Spatial Layout" Machines 10, no. 12: 1187. https://doi.org/10.3390/machines10121187
APA StyleWang, R., Niu, Z., Chen, K., & Sun, T. (2022). Kinematic Optimization Design and Performance Simulation of Novel 5-DOF Parallel Machining Robots with Spatial Layout. Machines, 10(12), 1187. https://doi.org/10.3390/machines10121187