
Horse Riding Simulator Design to Replicate Human Walking Gait for Hippotherapy in Cerebral Palsy Rehabilitation

 , , ,
, , ,
Abstract
1. Introduction
2. Related Research and Contribution of Our Works
- 1.
- We developed a mechanical horse design capable of simulating both shoulder and hip roll movement with a single main motor. We use only one motor since it is essential to make the control system of the horse movement as simple as possible. In addition, minimizing the number of actuators also means reducing costs, making the design affordable. Higher affordability also means higher accessibility for the user;
- 2.
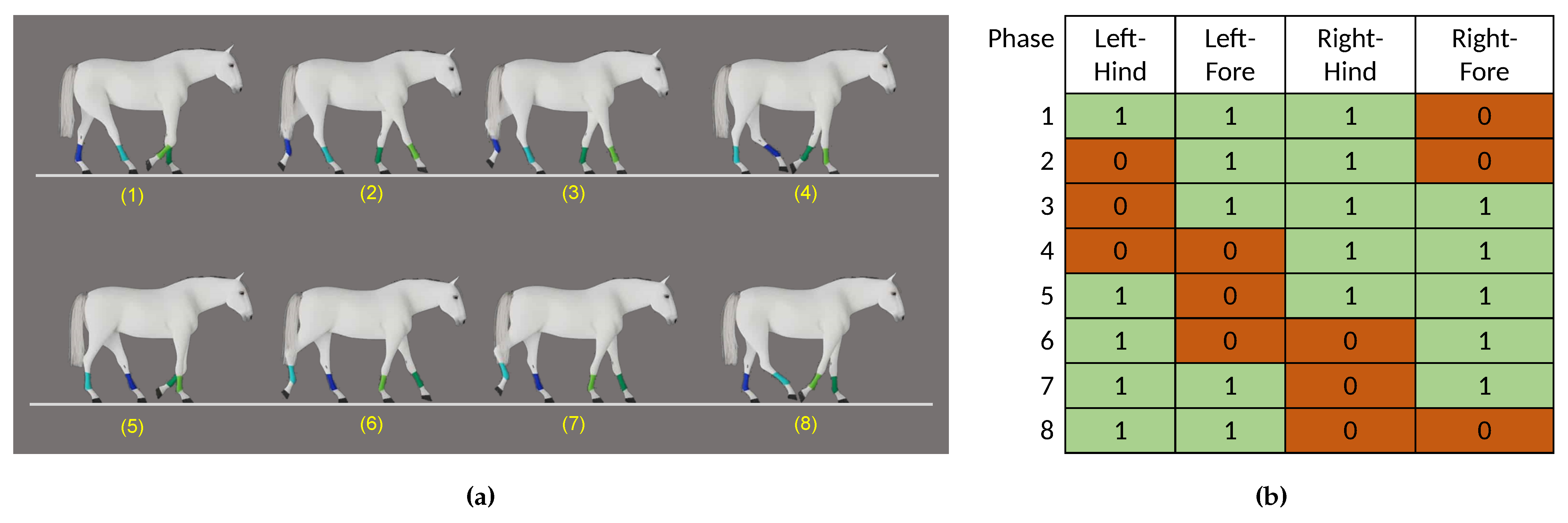
- We developed a mechanical horse design capable of simulating both shoulder and hip roll movement where the mechanical horse’s left shoulder, right shoulder, left hip, and right hip have different cyclic motion phases. We argue that this difference is important to create a dual frequency of the sinusoidal curve of horse pelvic obliquity pattern [36] where in the normal human walking gait, pelvic obliquity has the same pattern of dual frequency of sinusoidal curve [37,38,39,40];
- 3.
- The user’s gait when riding our mechanical horse closely resembles a human walking gait, which is a desirable gait for CP rehabilitation. We observe and discuss our experiments for comparing the user’s gait when riding the design and walking in Section 5.
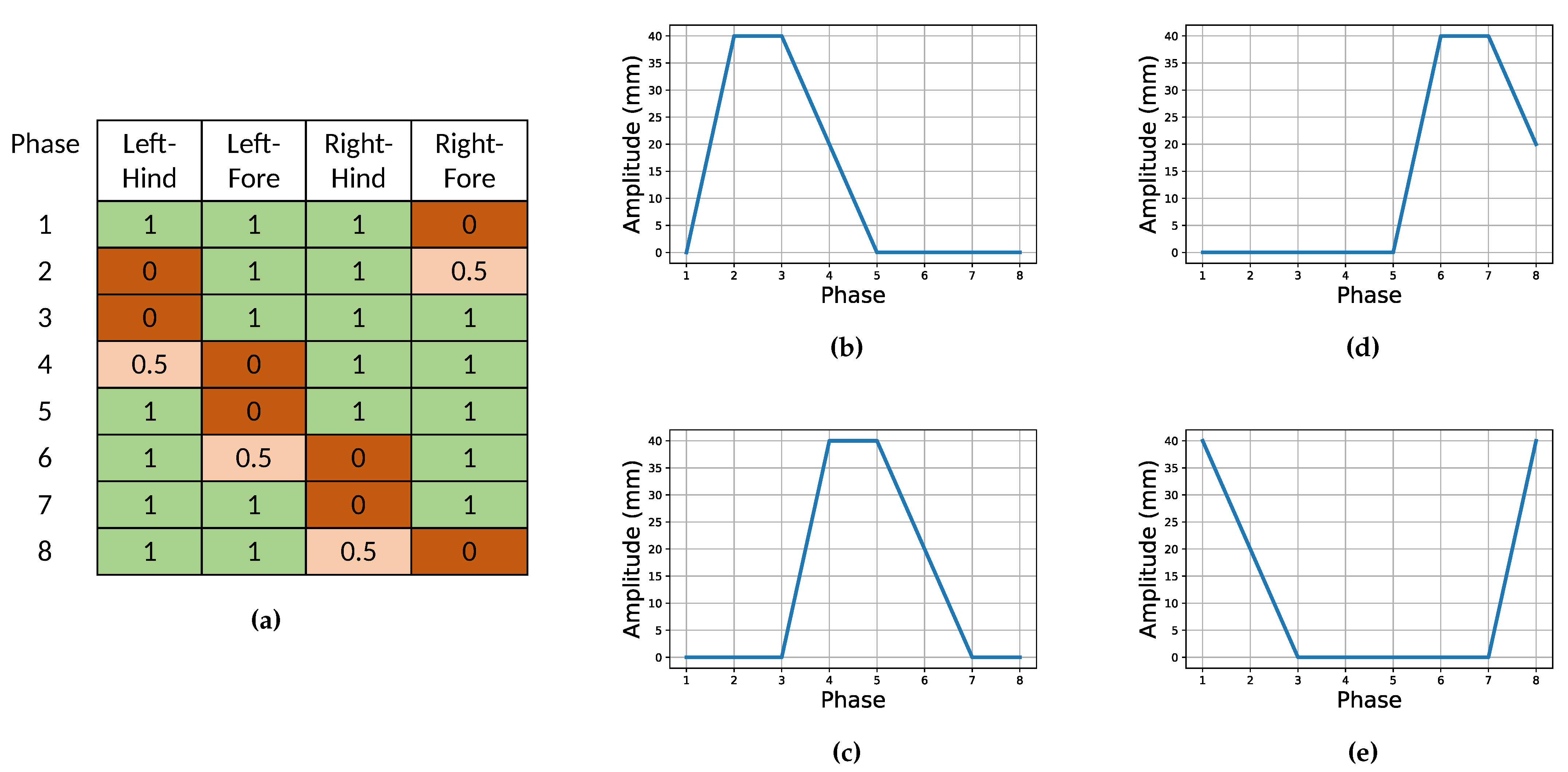
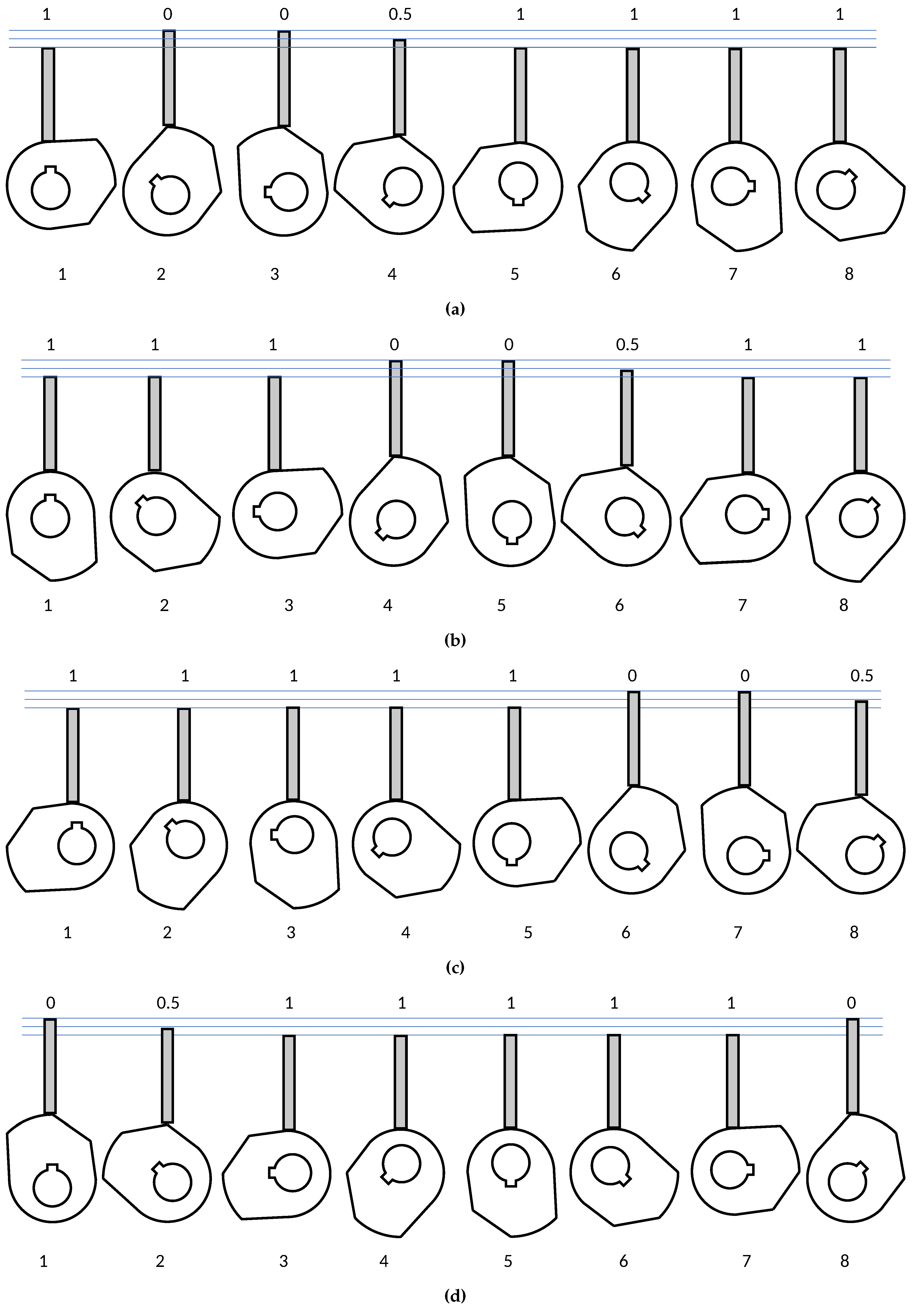
3. Horse Movement Observation and Cams-Followers Designs
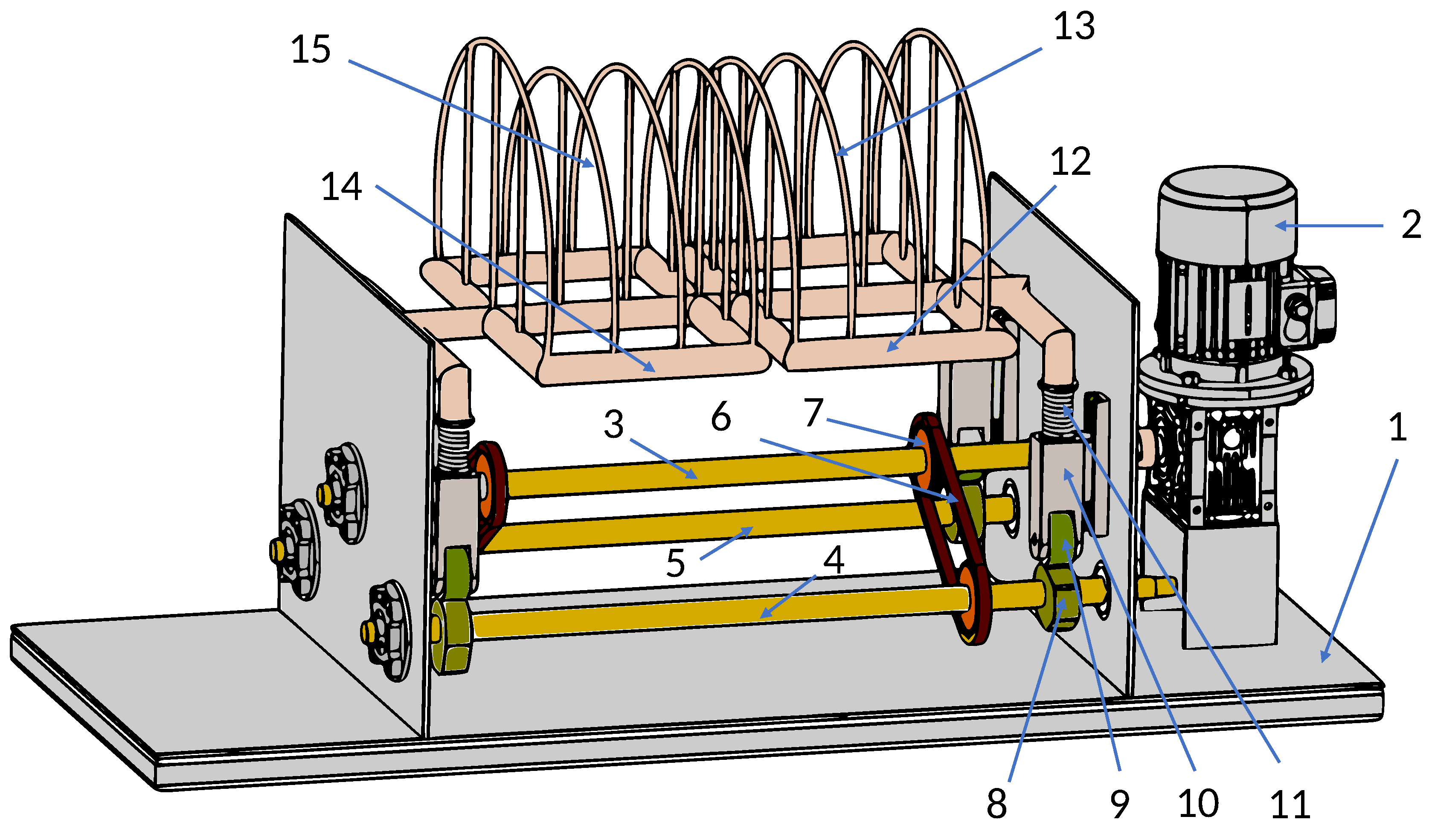
4. System Design, Build, and Assembly
4.1. System Block Diagram—Legs Mechanism
4.2. System Block Diagram—Hip and Shoulder Mechanism
4.3. Packaging and Saddle Designs
4.4. Building and Trials
5. Observations and Performance Evaluations
5.1. Data Acquisitions
5.2. Performance Evaluations
- 1.
- The shape of both data looks very similar, with a slight difference: the walking data closely resembles a sinusoidal function, while the peak of riding our design is not precisely sinusoidal but more of a triangular shape;
- 2.
- The amplitude of the pelvic tilt angles is also similar between both of them, which is about 5 to 6 degrees in up and down directions;
- 3.
- The slope between the peaks and troughs of each cycle is also similar to each other;
- 4.
- The curve is smooth while walking but has some noticeable notches when going up and down. These notches may be caused by the sudden jerk movements caused by the transition of the followers.
6. Discussion and Future Plans
6.1. Improvements Opportunities
- 1.
- Our HRS’s size and weight is relatively bulky compared to other mechanical horses’ design, especially compared to the store-bought HRS;
- 2.
- For safety reasons, a body weight support device might be necessary to minimize the falling risk, especially when the device is intended for children with CP.
6.2. Future Research and Developments Plan
7. Conclusions
- 1.
- Only uses one motor as the sole actuator, minimizing costs and power consumption. This is achieved by designing unique cams and followers mechanism that simulates actual horse movements;
- 2.
- Provides different movement phases between the shoulder and hip, mimicking actual horse body movements;
- 3.
- An actual horse saddle can be installed, which is beneficial to the user’s posture [35];
- 4.
- The design is capable of simulating a human walking gait, as proven by our experiment using video analysis.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CP | Cerebral Palsy |
| HRS | Horse Riding Simulator |
References
- Rosenbaum, P.; Paneth, N.; Leviton, A.; Goldstein, M.; Bax, M.; Damiano, D.; Dan, B.; Jacobsson, B. A report: The definition and classification of cerebral palsy April 2006. Dev. Med. Child Neurol. Suppl. 2007, 109, 8–14. [Google Scholar] [CrossRef] [PubMed]
- Wright, F.V.; Rosenbaum, P.L.; Goldsmith, C.H.; Law, M.; Fehlings, D.L. How do changes in body functions and structures, activity, and participation relate in children with cerebral palsy? Dev. Med. Child Neurol. 2008, 50, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Beckung, E.; Carlsson, G.; Carlsdotter, S.; Uvebrant, P. The natural history of gross motor development in children with cerebral palsy aged 1 to 15 years. Dev. Med. Child Neurol. 2007, 49, 751–756. [Google Scholar] [CrossRef]
- Koca, T.T.; Ataseven, H. What is hippotherapy? The indications and effectiveness of hippotherapy. North. Clin. Istanb. 2015, 2, 247. [Google Scholar] [CrossRef] [PubMed]
- Pantera, E.; Froment, P.; Vernay, D. Does Hippotherapy Improve the Functions in Children with Cerebral Palsy? Systematic Review Based on the International Classification of Functioning. J. Integr. Complement. Med. 2022. [Google Scholar] [CrossRef] [PubMed]
- Scott, N. Special Needs, Special Horses: A Guide to the Benefits of Therapeutic Riding; Number 4; University of North Texas Press: Denton, TX, USA, 2005. [Google Scholar]
- Moenardi, M.C.S.; Sungkar, E.; Hawani, D. Cerebral Palsy Parents’ Knowledge, Attitude, and Behavior at Dr. Hasan Sadikin General Hospital Bandung 2014. Althea Med. J. 2020, 7, 84–88. [Google Scholar] [CrossRef]
- Setyawan, A.; Mirajziana, K.; Husein, W.F. Terapi Berkuda (Hippotherapy) Sebagai Media Stabilisasi Emosi Penyandang Autisme. 2010. Available online: https://repository.ipb.ac.id/handle/123456789/44472 (accessed on 1 November 2022).
- Herrero, P.; Asensio, A.; Garcia, E.; Marco, A.; Olivan, B.; Ibarz, A.; Gomez-Trullen, E.M.; Casas, R. Study of the therapeutic effects of an advanced hippotherapy simulator in children with cerebral palsy: A randomised controlled trial. BMC Musculoskelet. Disord. 2010, 11, 1–6. [Google Scholar] [CrossRef] [PubMed]
- de Lima Mello, E.M.C.; de Lima, M.B.B.; Prieto, A.V.; Alves, F.M.; Bento, A.C.C.; Benedita, L.; Oliveira, S.; Blascovi-Assis, S.M. Effects of a JOBA horse riding simulator on postural balance in children with spastic cerebral palsy. Int. J. Dev. Res. 2011, 11, 48621–48624. [Google Scholar] [CrossRef]
- Borges, M.B.S.; Werneck, M.J.d.S.; Silva, M.d.L.d.; Gandolfi, L.; Pratesi, R. Therapeutic effects of a horse riding simulator in children with cerebral palsy. Arquivos de Neuro-Psiquiatria 2011, 69, 799–804. [Google Scholar] [CrossRef]
- Han, J.Y.; Kim, J.M.; Kim, S.K.; Chung, J.S.; Lee, H.C.; Lim, J.K.; Lee, J.; Park, K.Y. Therapeutic effects of mechanical horseback riding on gait and balance ability in stroke patients. Ann. Rehabil. Med. 2012, 36, 762–769. [Google Scholar] [CrossRef]
- Park, J.; Lee, S.; Lee, J.; Lee, D. The effects of horseback riding simulator exercise on postural balance of chronic stroke patients. J. Phys. Ther. Sci. 2013, 25, 1169–1172. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.J.; Kim, K.J.; Nam, K.W. The effects of a horseback riding simulation exercise on the spinal alignment of children with cerebral palsy. J. Korean Phys. Ther. 2014, 26, 209–215. [Google Scholar]
- Lee, C.w.; Kim, S.G.; Na, S.S. The effects of hippotherapy and a horse riding simulator on the balance of children with cerebral palsy. J. Phys. Ther. Sci. 2014, 26, 423–425. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Lee, D.; Lee, S.; Park, J. Effects of indoor horseback riding and virtual reality exercises on the dynamic balance ability of normal healthy adults. J. Phys. Ther. Sci. 2014, 26, 1903–1905. [Google Scholar] [CrossRef] [PubMed]
- Cho, W.S.; Cho, S.H. Effects of mechanical horseback riding exercise on static balance of patient with chronic stroke. J. Korea Acad.-Ind. Coop. Soc. 2015, 16, 1981–1988. [Google Scholar] [CrossRef]
- Temcharoensuk, P.; Lekskulchai, R.; Akamanon, C.; Ritruechai, P.A.; Ongsa, S.S. Effect of horseback riding versus a dynamic and static horse riding simulator on sitting ability of children with cerebral palsy: A randomized controlled trial. J. Phys. Ther. Sci. 2015, 27, 273–277. [Google Scholar] [CrossRef]
- Cha, Y.J.; Stanley, M.; Shurtleff, T.; You, J.S.H. Long-term effects of robotic hippotherapy on dynamic postural stability in cerebral palsy. Comput. Assist. Surg. 2016, 21, 111–115. [Google Scholar] [CrossRef][Green Version]
- Kim, M.J.; Kim, T.Y.; Oh, S.; Yoon, B.C. Equine Exercise in Younger and Older Adults: Simulated Versus Real Horseback Riding. Percept. Mot. Ski. 2018, 125, 93–108. [Google Scholar] [CrossRef]
- Park, J.H.; You, J.S.H. Innovative robotic hippotherapy improves postural muscle size and postural stability during the quiet stance and gait initiation in a child with cerebral palsy: A single case study. NeuroRehabilitation 2018, 42, 247–253. [Google Scholar] [CrossRef]
- Kim, H.W.; Nam, K.S.; Son, S.M. Effects of Virtual Reality Horse Riding Simulator Training Using a Head-Mounted Display on Balance and Gait Functions in Children with Cerebral Palsy: A Preliminary Pilot Study. J. Korean Phys. Ther. 2019, 31, 273–278. [Google Scholar] [CrossRef]
- Hemachithra, C.; Meena, N.; Ramanathan, R.; Felix, A.J.W. Immediate effect of horse riding simulator on adductor spasticity in children with cerebral palsy: A randomized controlled trial. Physiother. Res. Int. 2020, 25, e1809. [Google Scholar] [CrossRef] [PubMed]
- Chinniah, H.; Natarajan, M.; Ramanathan, R.; Ambrose, J.W.F. Effects of horse riding simulator on sitting motor function in children with spastic cerebral palsy. Physiother. Res. Int. 2020, 25, e1870. [Google Scholar] [CrossRef] [PubMed]
- Jung, Y.G.; Chang, H.J.; Jo, E.S.; Kim, D.H. The Effect of a Horse-Riding Simulator with Virtual Reality on Gross Motor Function and Body Composition of Children with Cerebral Palsy: Preliminary Study. Sensors 2022, 22, 2903. [Google Scholar] [CrossRef] [PubMed]
- Satriawan, A.; Trusaji, W.; Hasanuddin, M.O.; Rahadini, S.S.; Selekta, M.C.; Sungkar, E. Design of Virtual Reality-Based Hippotherapy Simulator Exergaming Software and Its Controller for Rehabilitation of Children with Cerebral Palsy in Indonesia: An Engineering Concept. Designs 2022, 6, 76. [Google Scholar] [CrossRef]
- Park, J.H.; Shurtleff, T.; Engsberg, J.; Rafferty, S.; You, J.Y.; You, I.Y.; You, S.H. Comparison between the robo-horse and real horse movements for hippotherapy. Bio-Med. Mater. Eng. 2014, 24, 2603–2610. [Google Scholar] [CrossRef]
- Garner, B.A.; Rigby, B.R. Human pelvis motions when walking and when riding a therapeutic horse. Hum. Mov. Sci. 2015, 39, 121–137. [Google Scholar] [CrossRef]
- Yamaguchi, M.; Iguchi, N. Development of a horseback riding simulator. Adv. Robot. 1991, 6, 517–528. [Google Scholar] [CrossRef]
- Lott, J. A Mechanized Horseback Riding Simulator as an Aid to Physical Therapy. 2006. Available online: https://digitalcommons.usf.edu/etd/3752/ (accessed on 1 November 2022).
- Lee, W.; So, B.R.; Lee, Y.; Moon, C. A new robotic horseback-riding simulator for riding lessons and equine-assisted therapy. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418784433. [Google Scholar] [CrossRef]
- Benoit, H.D.; Garner, B.A. Designing, Constructing, and Testing a Second-Generation Prototype Mechanical Hippotherapy Horse. 2011. Available online: https://baylor-ir.tdl.org/handle/2104/8200 (accessed on 1 November 2022).
- Montgomery, M. Development and Validation of a Robust, Adjustable Hippotherapy Simulator. 2015. Available online: https://scholar.rose-hulman.edu/abbe_grad_theses/7/ (accessed on 1 November 2022).
- Montgomery, M.J. Hippotherapy Device. U.S. Patent US10960267B2, 30 March 2021. Available online: https://patents.google.com/patent/US10960267B2/en (accessed on 1 November 2022).
- Greve, L.; Dyson, S. The horse–saddle–rider interaction. Vet. J. 2013, 195, 275–281. [Google Scholar] [CrossRef]
- MacPhail, H.A.; Edwards, J.; Golding, J.; Miller, K.; Mosier, C.; Zwiers, T. Trunk Postural Reactions in Children with and without Cerebral Palsy during Therapeutic Horseback Riding. 1998. Available online: https://journals.lww.com/pedpt/abstract/1998/01040/trunk_postural_reactions_in_children_with_and.2.aspx (accessed on 1 November 2022).
- Lewis, C.L.; Laudicina, N.M.; Khuu, A.; Loverro, K.L. The human pelvis: Variation in structure and function during gait. Anat. Rec. 2017, 300, 633–642. [Google Scholar] [CrossRef]
- Forczek, W.; Ivanenko, Y.; Salamaga, M.; Sylos-Labini, F.; Frączek, B.; Masłoń, A.; Curyło, M.; Suder, A. Pelvic movements during walking throughout gestation-the relationship between morphology and kinematic parameters. Clin. Biomech. 2020, 71, 146–151. [Google Scholar] [CrossRef] [PubMed]
- Michaud, S.B.; Gard, S.A.; Childress, D.S. A Preliminary Investigation of Pelvic Obliquity Patterns during Gait in Persons with Transtibial and Transfemoral Amputation. 2000. Available online: https://pubmed.ncbi.nlm.nih.gov/10847567/ (accessed on 1 November 2022).
- Bolink, S.A.; Brunton, L.R.; van Laarhoven, S.; Lipperts, M.; Heyligers, I.C.; Blom, A.W.; Grimm, B. Frontal plane pelvic motion during gait captures hip osteoarthritis related disability. Hip Int. 2015, 25, 413–419. [Google Scholar] [CrossRef] [PubMed]
- Lightsey, P.; Lee, Y.; Krenek, N.; Hur, P. Physical therapy treatments incorporating equine movement: A pilot study exploring interactions between children with cerebral palsy and the horse. J. Neuroeng. Rehabil. 2021, 18, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Harris, S.E. Horse Gaits, Balance, and Movement: The Natural Mechanics of Movement Common to All Breeds; Souvenir Press: London, UK, 2017. [Google Scholar]
- Luso Maria. The 4 Basic Horse Gaits Explained [Diagrams & Animations]. 2020. Available online: https://www.horsesandus.com/the-4-basic-horse-gaits-explained/ (accessed on 1 November 2022).
- Mukhopadhyay, P.; Chaudhuri, B.B. A survey of Hough Transform. Pattern Recognit. 2015, 48, 993–1010. [Google Scholar] [CrossRef]
- Schafer, R.W. What is a Savitzky-Golay filter? [lecture notes]. IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Panasonic JOBA [9,10,11,12,14,16,22] | Daewon Fortis [13,17,19,20,21] | OSIM uGallop [18,23,24] | SRIDER [15]/ Shinhwa [25]/ JUFIT [26] | Yamaguchi [29] | Lott [30] | Lee [31] | Benoit [32] | Montgomery [33] | Our Design |
|---|---|---|---|---|---|---|---|---|---|---|
| Horse Gait | Side to side workout, forward and backward tilt waist | Gallop | Gallop | Gallop | Walk, trot, canter | Walk, trot, canter | Walk, trot, canter, gallop | Walk | Walk | Walk, modified to replicate a human’s walking gait |
| Mechanisms | Unknown | Unknown | Unknown | Unknown | Linear actuator | Linear actuator | Linear actuator and rotation module | Linear actuator (Stewart platform) | Cams and followers, with different front and rear sizes | Cams and Followers |
| Number of Actuators | Unknown | Unknown | Unknown | Unknown | 2: Foreleg and hindleg | 2: Horizontal and vertical | 4: Left-fore, left-hind, right-fore, right-hind | 6 Stewart platform actuator | 1 motor and 4 cams and followers | 1 motor and 4 cams and followers |
| Horse Body Segments | 1 | 1 | 1 | 1 | 1 | 1, a foam can be added to simulate flexion-extension | 1 | 1 | Eight flexible rib segments | 2: shoulder and hip |
| Movements | Up, down, forward, backward, pitch, and roll | Up, down, forward, backward, and pitch | Pitch and roll | Up, down, forward, backward | Up, down, forward, backward | Up, down, forward, backward, and pitch | x, y, z, roll, pitch, and yaw | x, y, z, roll, pitch, and yaw | Mimic hip and shoulder motions of a walking horse | Mimic hip and shoulder motions of a walking horse |
| Saddle | Saddle-shaped seat | Saddle-shaped seat | Saddle-shaped seat | Saddle-shaped seat | Saddle can be attached | Saddle can be attached | No saddle | No saddle | No saddle | Using actual horse saddle |
| Other remarks | Specifically designed as an exercise device | Specifically designed as an exercise device | Specifically designed as an exercise device | Specifically designed as an exercise device, the speed is too fast, even for the lowest settings | No roll motion that important to mimic a walking horse | No roll motion and only has 1 horse body segments | Only has 1 horse body segments, while a walking horse has different roll phase between fore-legs and hind-legs | Only has 1 horse body segments, while a walking horse has different roll phase between fore-legs and hind-legs | Although the design is mimicking the flexion of horseback, the size is not to scale. The ribs also can be a pinch point hazard to the fingers of children users. | Mimic the motion of a horse’s hip and shoulder with a similar size to accommodate an actual horse saddle |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trusaji, W.; Satriawan, A.; Rahadini, S.S.; Hasanuddin, M.O.; Setianingsih, C.; Pratomo, N.; Selekta, M.C.; Sungkar, E. Horse Riding Simulator Design to Replicate Human Walking Gait for Hippotherapy in Cerebral Palsy Rehabilitation. Machines 2022, 10, 1060. https://doi.org/10.3390/machines10111060
Trusaji W, Satriawan A, Rahadini SS, Hasanuddin MO, Setianingsih C, Pratomo N, Selekta MC, Sungkar E. Horse Riding Simulator Design to Replicate Human Walking Gait for Hippotherapy in Cerebral Palsy Rehabilitation. Machines. 2022; 10(11):1060. https://doi.org/10.3390/machines10111060
Chicago/Turabian StyleTrusaji, Wildan, Ardianto Satriawan, Septia Susanti Rahadini, Muhammad Ogin Hasanuddin, Casi Setianingsih, Nurseptian Pratomo, Mayang Cendikia Selekta, and Ellyana Sungkar. 2022. "Horse Riding Simulator Design to Replicate Human Walking Gait for Hippotherapy in Cerebral Palsy Rehabilitation" Machines 10, no. 11: 1060. https://doi.org/10.3390/machines10111060
APA StyleTrusaji, W., Satriawan, A., Rahadini, S. S., Hasanuddin, M. O., Setianingsih, C., Pratomo, N., Selekta, M. C., & Sungkar, E. (2022). Horse Riding Simulator Design to Replicate Human Walking Gait for Hippotherapy in Cerebral Palsy Rehabilitation. Machines, 10(11), 1060. https://doi.org/10.3390/machines10111060