1. Introduction
Since the 1960s, research has been carried out on developing orthopedic devices for the lower extremities for military purposes. In medical services, the latter focused on the problems of human locomotion, especially in people with some disorder in their lower extremities. In Mexico, 51% of the population has some type of disability, the most frequent being motor disability; either due to weakness or absence of movement of one or both feet, caused by different types of injuries, diseases, or even the ravages of age, disability being understood as the restriction or absence of the ability to perform an activity that is considered normal for any person [
1]. On average, an emergency department in Mexico City attends to more than 12 thousand patients a year who need some surgical intervention because of a fracture or knee injuries, among which young people stand out. In general, those who perform sports activities suffer mainly from meniscus injuries, ligaments, chondral injuries, and dislocations of the patella [
2].
In addition, elderly adults suffer from gait disorders, impairments, and functional deterioration in the lower extremities due to the signs of age. This attracts considerable social and ethical attention to how to assist the elderly in their daily lives, especially in aspects such as mobility and autonomy. In this time when technology is becoming indispensable, autonomous, and safe, the development of lower limb orthoses and exoskeletons has evolved prosperously in terms of the type of mechanical structure, use of actuators and control interfaces, materials, and mechanical components; this to meet the needs of people, solve their physical problems and represent one of the options for mobility assistance. Nowadays, it is considered a tool to relieve therapists’ repetitive and heavy rehabilitation work, and that has shown improvements in the patient’s recovery efficiency [
3].
Any device that actively impacts the dynamics and interacts with the human body is considered a robotic or, more specifically, biomechatronic device. Exoskeletons are rigid structures that interact with a series of human joints. On the other hand, orthotic devices or orthoses interact with a single human joint [
4]. Orthoses can be static if they lack mobility, dynamic if they have joint components that allow defining ranges of mobility, and mixed or hybrid if they simultaneously incorporate static and dynamic elements [
5].
An orthosis is a device applied externally to the human body or a body segment, which is used to modify the structural or functional characteristics of the neuromusculoskeletal system, to maintain, improve, or recover limb function [
5,
6]. Knee orthoses are used in physical therapy and orthopedic practice for treating knee conditions and injury prevention [
7].
In the evolutionary advance of orthopedic devices, studies have shown progress in locking mechanisms in the knee joint of passive and active orthoses to improve gait stability. Work has been completed to implement linear actuators, rotary, pneumatic, and artificial hydraulic muscles, and elastic elements to replicate the gait cycle in a natural way, which implies the generation of control strategies and signal processing through the use of inertial and myoelectric sensors. This paper presents a description of the characteristics and considerations of some knee orthosis designs considering the technological advances that have been considered in the design and development of them, such as the mechanisms and actuators used in the joint, types of locking in the gait stage, types of controllers and sensors.
The remainder of this document is structured as follows:
Section 2 presents the methodology for selecting the articles included in this paper.
Section 3 describes the definition of orthoses, the general objectives of their use, and the materials used for their fabrication.
Section 4 presents the classification of active and passive orthoses, showing the mechanisms and locking systems of the knee joint in the design of passive orthoses.
Section 5 offers the types of actuators used in orthosis design, such as electric, electromagnetic, mechanical, hydraulic, and pneumatic actuators.
Section 6 describes the control systems implemented in the orthosis designs for their manipulation.
Section 7 discusses the results, summarizing the characteristics of active orthoses and mentioning the challenges for the design and fabrication of orthoses.
Section 8 provides the conclusions of this study showing the indicators to be considered in the design of knee orthoses.
2. Methodology
This paper aims to provide an overview of the strategies and technological considerations for fabricating passive and active orthoses. Based on the collected literature, we have studied the main orthopedic robotic devices and their validity for use in rehabilitation processes and the development of daily activities.
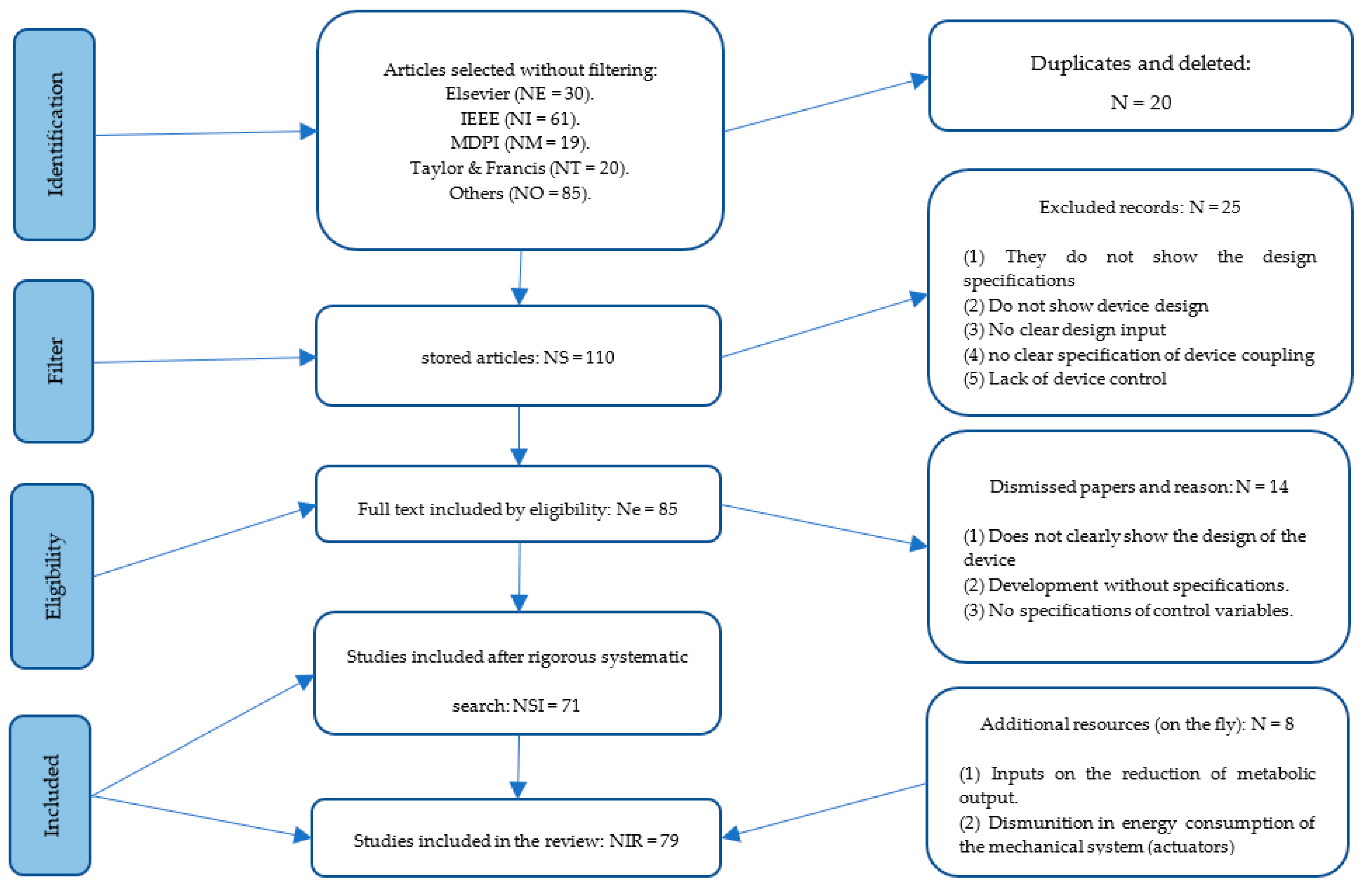
A systematic search was conducted, analyzing and classifying a considerable number of articles in international Mechanical Engineering and Biomechatronics journals. A specific procedure for the search and compilation of the information was carried out and structured for presentation in this article following the PRISMA framework. Web of Science, Science Research, PubMed, ScienceDirect, and Scopus databases were searched to identify studies on the design and construction of orthopedic devices for the lower extremity focused on the knee joint.
The information search and selection strategy were carried out in the following stages:
Articles published in Spanish and English.
Search articles through keywords such as orthosis, knee, design, joints, actuators, mechanical systems, control, human locomotion, and a combination of these words.
Thoroughly evaluate and analyze the selected articles’ titles, abstracts, and keywords and perform a classification by focus orthoses, actuators, and control systems.
A complete reading of the articles highlighting essential results.
Bibliography from national and international congresses and formal texts on Biomechatronics and Mechanics were used. The classification can be summarized as follows, as shown in
Figure 1. A total of 210 articles were counted. Outstanding, their number is 61 from IEEE, 20 from Taylor & Francis, 30 from Elsevier, and 19 from MDPI, among other publishers. The use of specialized software such as Mendeley was reported to carry out the compilation and classification.
3. Orthoses
Orthoses are mechanical devices that work parallel to a limb of the human body to facilitate the development of physical activities. The general objectives of orthoses or orthopedic devices are to stabilize and support weak or paralyzed segments and/or joints, to control abnormal or spastic movements, to provide strength to the joint, and to save energy in the locomotion process. In addition, different types of robotic orthoses have the potential to provide effective upper and lower extremity rehabilitation while overcoming therapists’ limitations.
3.1. Types of Orthoses
Lower extremity orthoses can be classified according to different criteria, such as: by the anatomical segment involved (cervical, thoracic, lumbar, etc.); the type of restriction they provide (flexible, rigid, semi-rigid); the objective of the prescription (support, immobilization, correction, etc.); or by the pathology to which they are directed (scoliosis, fractures, nerve paralysis). Likewise, orthoses can be classified as passive, which lack mobility. In addition, devices with joints that require the strength of the limb of the people who require them are considered; active by their articular components that allow defining ranges of mobility and that require actuators with external power sources to generate their movement and mixed or hybrid, when they incorporate passive and active at the same time.
Another way to classify these orthopedic devices is to use therapeutic criteria based on the functions performed by the orthoses; (a) unloading, protective-preventive orthoses, allow reduction of forces or axial load on the body or segments; (b) immobilization, rest or realignment orthoses, allow modification of movements with the purpose of maintaining or correcting a deformity; (c) stabilization-protection or support-containment orthoses, allow stabilization or protection of injured and/or unstable structures due to failure of internal stabilization forces; (d) Functional-dynamic orthoses, allow assistance or facilitation of movement to weak/paralyzed muscles or deficient movements; (e) Postural or deformity-preventive orthoses, allow postural realignment or maintenance due to muscular imbalances, malpositions; (f) Corrective orthoses, allow prevention and correction of deformities through the application of forces; (g) When several or all of the main functions are combined, they are known as mixed orthoses.
Table 1 shows a general classification according to the joint for which it was designed [
5,
8,
9].
3.2. Materials
In the manufacture of orthoses, an important range of materials can be used in the fabrication of these devices. They are chosen based on the function they will perform, as well as on multiple factors, such as the therapeutic objective based on the function that the orthosis will serve, whether structural, support, contact, or coating, and the physical characteristics of resistance and density of the material, durability, economic costs.
Table 2 shows the different materials for the manufacture of orthoses [
5,
10].
4. Knee Orthoses
4.1. Passive Orthoses
Since the 1970s, brace designs with different mechanisms have been presented: single hinge brace-like, double hinge braces with steel suspenders, and foam rubber pads on flanges. The use of orthotics has shown that subtle control that maximizes forward momentum produces small propulsive forces and compensates for energy losses. Knee orthoses have most often been prescribed for patients with rheumatoid arthritis or ligament laxity after injury. The problems and implications of this orthotics branch are considered clinically and mechanically.
The recommendation for using passive knee orthoses consists of the particular characteristics of each patient and the type of injury presented. In [
11], research is presented describing the characteristics, applications, and deficiencies of orthopedic devices for lower extremities, such as The elastic circumferential orthosis with crossbars (see
Figure 2a), which is commonly used for patients with rheumatoid arthritis, often when a deformity is present; the Swedish knee brace, this orthosis is specifically designed to limit hyperextension of the knee (see
Figure 2b). It consists of a plastic-coated aluminum H-frame with fabric straps at the top and bottom and a padded band at the popliteal fossa; the custom orthosis with hinged crossbars, the usually metal hinged crossbars, are attached to the molded thighs and calves (see
Figure 2c).
Some knee orthoses are placed with special adaptations and characteristics according to the patient’s problems, such as adaptations of plaster parts in the leg, leather or fabric straps, elastic bands, or special bandages; with specific measures to adapt to the model to protect the medial collateral ligament, thus applying force to provide stability and stiffness directed medially in the center of the knee [
12].
In the development of orthoses, several mechanisms have been used to provide stability and stiffness to the knee joint and to provide strength to the joint at the time of gait initiation. One mechanism frequently used in an orthosis is the posterior axis or delayed axis joint, which integrates straps to strengthen the knee and correct its alignment (see
Figure 3a,b) [
13,
14,
15]. This orthosis is used when there is no proper musculature in the legs due to flaccid paralysis or polio, i.e., people develop recurvatum in the knee joint. Other important aspects to consider in the design and fabrication of orthoses are safety, comfort, and ease of flexion and extension movement when the person is required to sit or stand. The latter is achieved by locking the knee joint and providing stability during the stance phase of gait and even during contact phases. In the same way, a mechanism is proposed to unlock the knee for greater aesthetics and comfort when sitting.
Locking Mechanisms
Mechanisms for locking the knee joint in extension vary from simple gravity (drop) ring locks, spring-assisted drop locks, cams, ratchets, and Swiss locks. The difficulty in unlocking the knee to allow sitting has led to the development of various designs, again starting with the simple ring lock, with extensions added to the drop locks and bails (mechanical links between the medial and lateral locks on a single limb). To prevent accidental unlocking of a joint and possible injury to the patient, designers have added ball retainers, springs, and elastic straps to avoid accidental and inadvertent knee joint flexion and subsequent falls [
14].
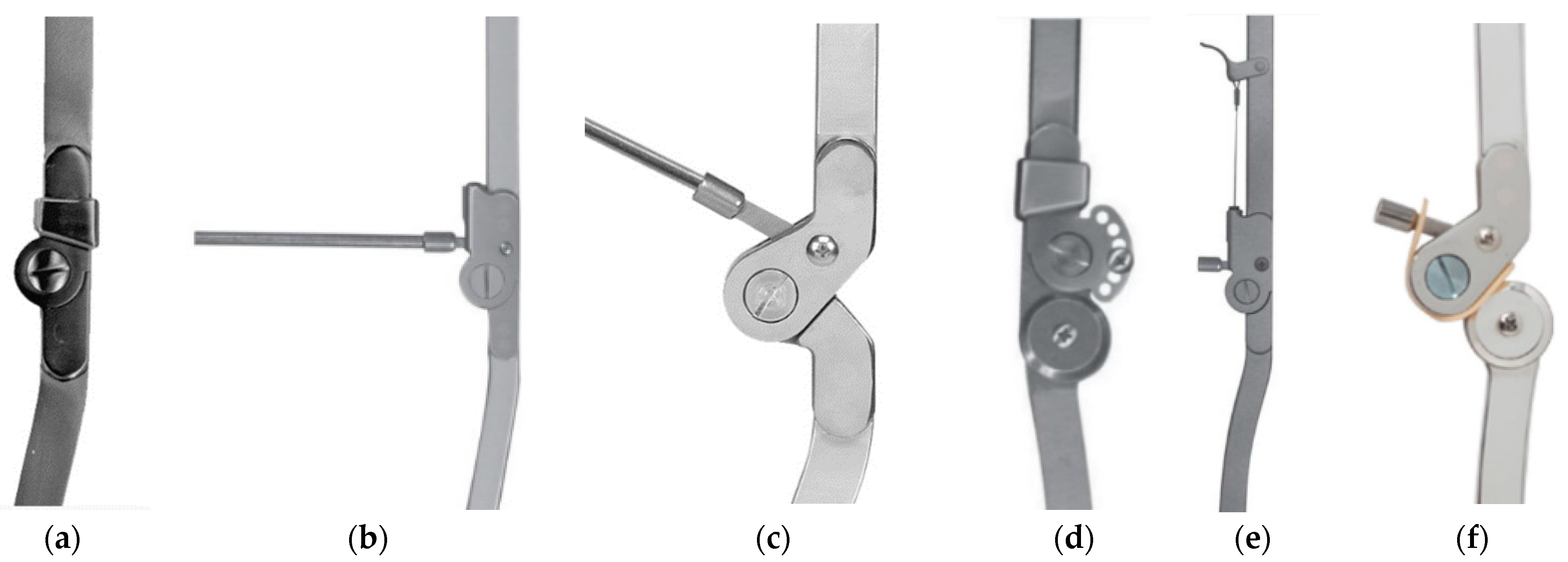
Currently, in the design and development of passive knee orthoses, this type of joint is still implemented due to the ease of applying to lock and unlocking in the flexion and extension movement performed in rehabilitation processes, in
Figure 4 shows some examples of joints with locking mechanisms [
16].
Traditional knee osteoarthritis (OA) braces are generally only indicated with modifications for those with unicompartmental disease affecting the tibiofemoral joint. For this reason, an assistive brace is required for use in a wider range of patients with knee OA and characteristic heterogeneous symptoms: patellofemoral, tibiofemoral, or multicompartmental. Recently a “tricompartmental unloading” (TCO) assistive brace was developed to treat knee pain and function in patients with OA. The design simultaneously reduces the contact forces of the patellofemoral (PF) and medial tibiofemoral (TF) joints during weight-bearing activity, with the knee flexed when joint forces are known to be higher (see
Figure 3c) [
15].
4.2. Active Orthoses
In the last decades, special efforts have been made to improve and develop the design of lower limb orthoses, having as a challenge to replicate the locomotion activities in daily life for people who suffer some disability in the lower limbs or simply due to age-related damage, considering as important factors of improvement in the use of orthoses: mobility, strength, and endurance of people who require these orthopedic devices. Orthoses and exoskeletons have been designed to facilitate rehabilitation processes, which provide mechanized assistance to the patient’s locomotion movement, providing balance, stiffness, increased strength, decreased weight of the devices, and reduced energy expenditure for the knee joints using mechanisms, actuators, and control systems [
17].
Efforts to improve these orthopedic devices have had favorable results in the clinical field with the implementation of robotic devices in rehabilitation processes and in the mechanical aspect with the development of orthoses prototypes that are increasingly complex and easy to use, in addition to contributing considerably to improving and accelerating the recovery of people with walking impairment. Further efforts should be focused on designing and elaborating these robotic orthopedic prototypes where efficiency improvements are proposed for the benefit of patients, such as the proposed case of a prototype of a lightweight orthosis actuated with pneumatic artificial muscles for the ankle-foot [
18].
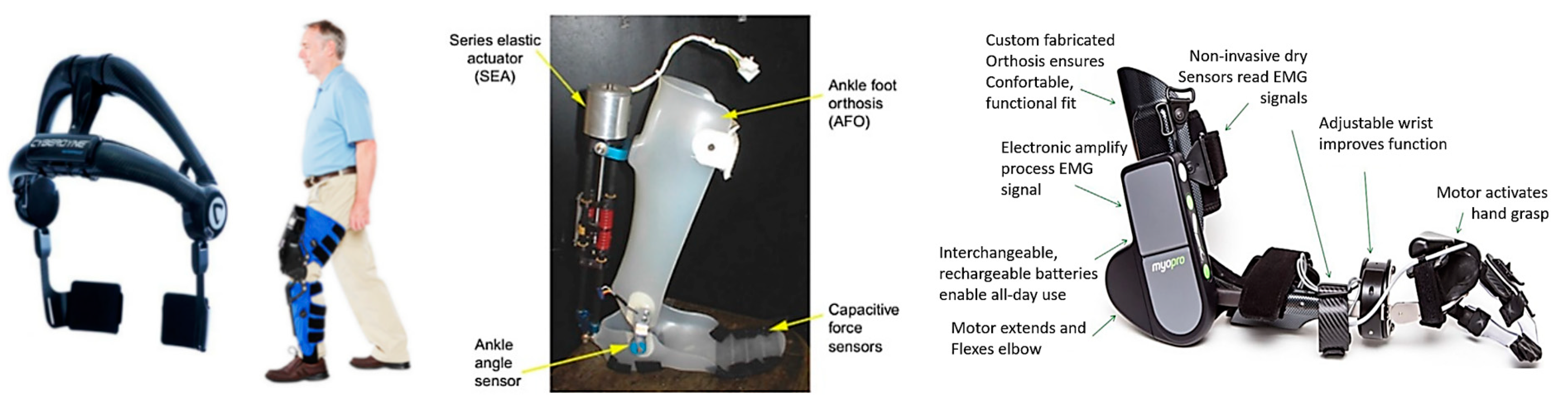
In [
4], a review of the state of the art of various orthopedic systems for hip, ankle, shoulder, elbow, wrist, and hand is presented to provide an overview of the state-of-the-art technologies (see
Figure 5). As mentioned above, the use of technological elements for the design of these devices and the integration of sciences such as mechanics, electronics, computer systems, mechatronics, and biomechatronics, among others, provides an opportunity to emphasize other aspects that help to improve the functioning of orthopedic devices, such as proposing strategies to reduce the energy consumption of patients in the rehabilitation process or when performing daily activities.
5. Actuators
An important factor in the design of robotic orthoses is actuators and mechanism systems [
19]. Implementing such actuation elements as electric, electromagnetic, mechanical, hydraulic, and pneumatic actuators have been used to design robotic joints and/or artificial muscles with independent movements or to follow defined trajectories, with results such as the design and development of active knee orthoses. Orthoses designs become voluminous and heavy by incorporating actuation systems. For this reason, work is underway to create lightweight prototypes by selecting appropriate actuators, mechanical elements, and/or a combination of materials and light elements.
5.1. Electrical Actuators
In the development of orthoses designs, actuators with adjustable stiffness (AwAS) have been used, allowing robots to work closely with or physically interact with humans. These actuators can be used in any orthopedic device [
20,
21,
22,
23]. In 2015, a prototype of an orthosis with an adjustable compliance actuator, named “Mechanical Rotational Impedance Actuator” (MRIA), was proposed. The actuator is designed for continuous stiffness regulation and torque generation. This is achieved by two motors [
24]. In 2010, the design of a lightweight adjustable exoskeleton for exercising human legs of different sizes and weights was proposed, a DC motor operates this device at each joint, and an experimental setup with motor controllers and power supplies was integrated [
25,
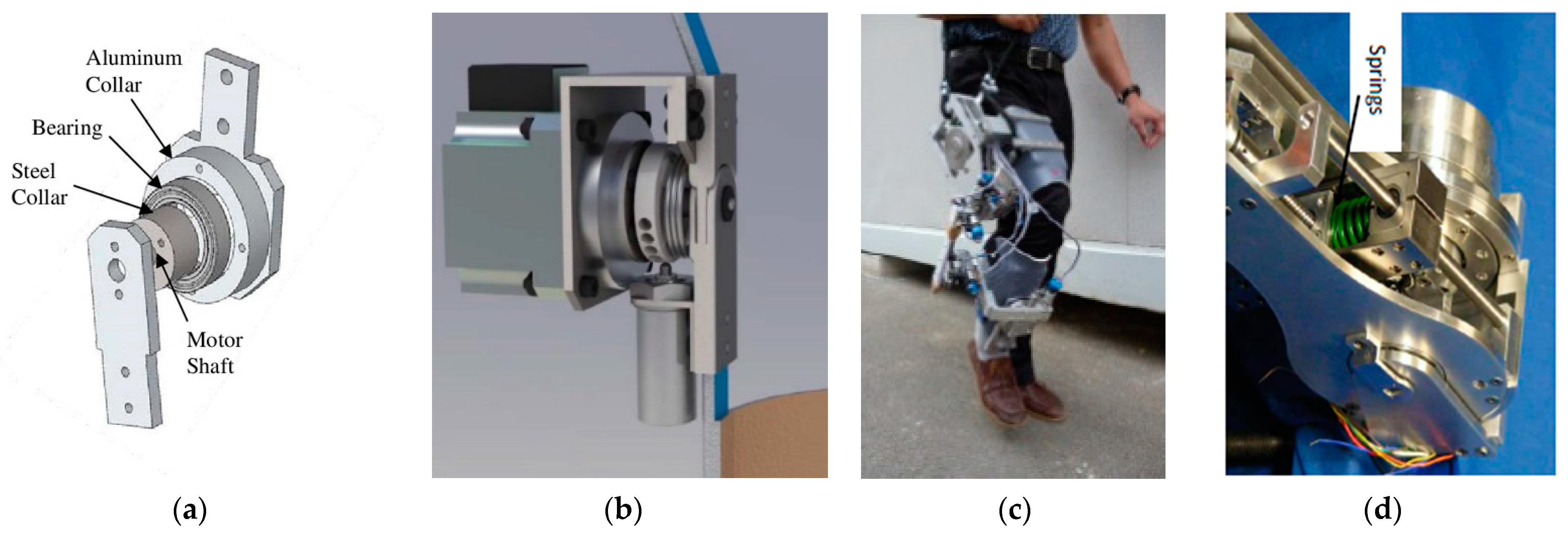
26]. Also, the design of an active knee and ankle orthosis with support control to assist the gait of injured people is presented, consists of two actuators, one linear and the other rotary, is integrated with a locking system consisting basically of a solenoid positioned parallel to the leg and an auger wheel on the joint axis, which rotates as the leg moves, this orthosis is designed to reduce this metabolic cost and allow people to walk more naturally and efficiently, by assisting flexion and extension during swing phase and locking the knee during stance phase (see
Figure 6) [
27].
A knee joint exoskeleton that can apply programmable torques to the joint and self-adjust to its physiological movements is presented. The device comprises seven links forming a kinematic chain of 6 degrees of freedom. The first three rotational joints cross at the starting point and are connected to a sliding joint that allows the mechanism to adapt to different limb sizes. The last two rotational joints compensate for the displacement between axes 2 and 3, the tibial axis, and the var-us-valgus axis (see
Figure 6) [
28].
In [
29], an orthosis using a quasi-direct drive actuator with a low ratio transmission (7:1) is proposed to significantly reduce the reflected inertia for high backward driving capability. To provide significant assistance, a custom brushless DC (BLDC) motor with encapsulated windings improves the motor’s thermal environment and its continuous torque output [
30]. The 2.69 kg orthosis is fabricated with all custom components with a high packaging factor for lightweight and compact size. An active knee orthosis is proposed, which consists of an active knee joint and a double tendon sheath drive system [
31,
32].
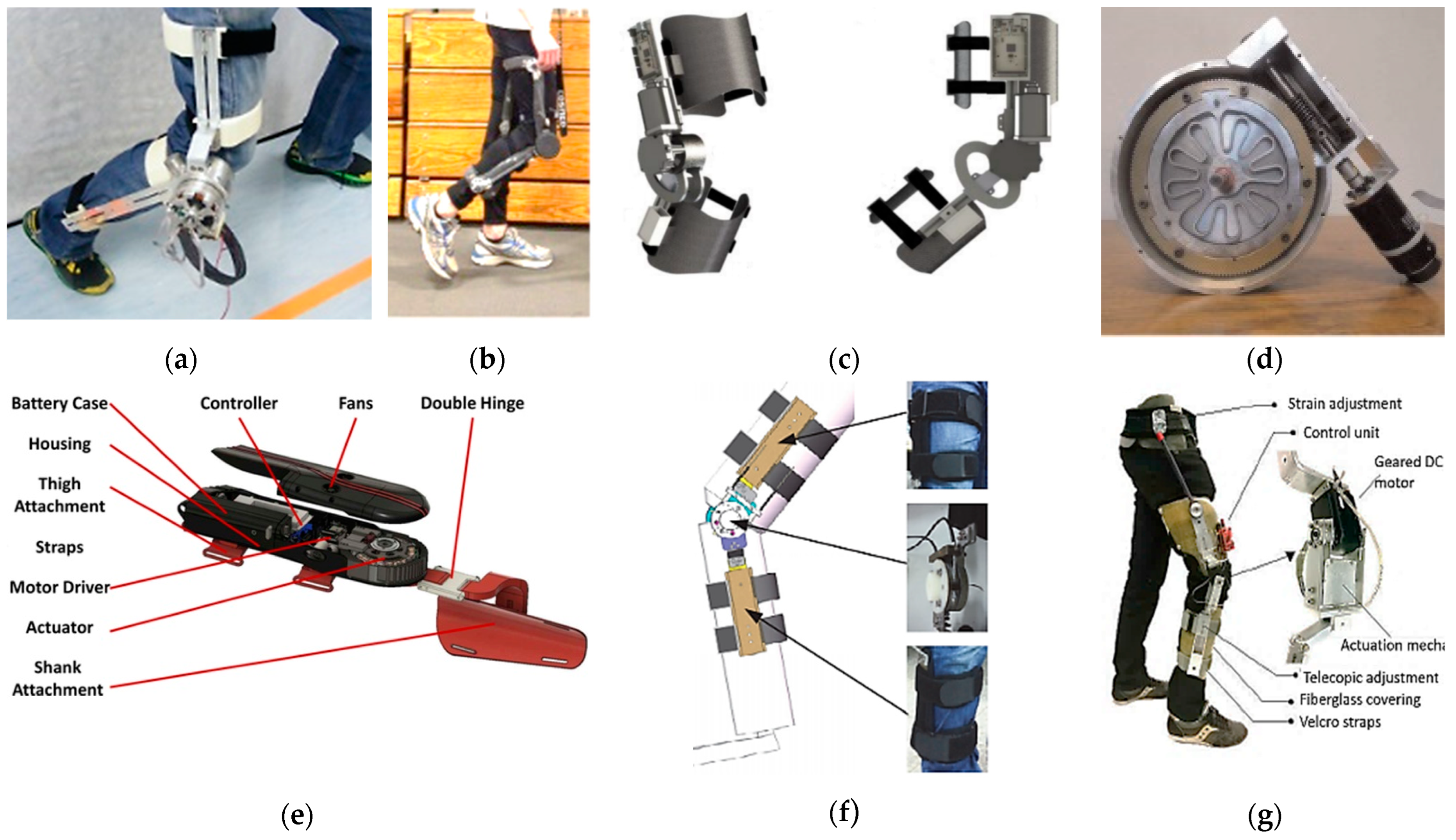
A device with an actuation and control system designed for geared electromagnetic motors is proposed, which is characterized by simple implementation, fast response to external input loads, and reliable human-machine interaction characteristics. This device was constructed using lightweight and stress-resistant materials. The thigh and calf frames were constructed from aluminum to provide rigidity, while the shells were made from a combination of fiberglass, plastic, and foam. With a telescoping mechanism on both the thigh and calf to adjust the user’s leg length to align the orthosis with the rotational axis of the knee, four Velcro straps were used to attach the orthosis to the thigh and calf [
33].
In [
34], they propose an orthosis consisting of ergonomic suspenders using 3D printed PLA + carbon fiber, adjustable Velcro straps, a DC motor with its gearbox, and aluminum parts that fit into the joint and force transfer structure, similar to those presented in [
35,
36] with the use of DC motors. In [
32,
37], an overview of current achievements in the field of Bowden cable-driven lower extremity portable robots is shown. These devices have mainly some of the following objectives: decrease muscle activity in knee extensors, assistance to older adults, postoperative assistance, and rehabilitation. In the design of joints for orthopedic devices such as knee orthoses, electric actuators such as rotary and linear actuators using DC motors with or without brushes are considered, as well as gear systems to perform the necessary movements of the joint to which they are directed [
38,
39,
40,
41,
42] (see
Figure 7).
5.2. Mechanical Actuators (Spring Actuators)
Considering that the leg has a spring-like behavior during the stance phase of the stroke, configurations and arrangements with parallel and series elastic systems have been used to work on minimizing energy costs. A parallel elastic exoskeleton has been proposed that introduces a clutch to decouple the spring from the parallel leg and thus not restrict the swing phase movements of the leg, with a planetary gear drive clutch, which is made necessary by the requirement of high holding torque but low mass [
41,
42,
43,
44,
45,
46,
47]. Ref. [
48] proposes a device with a parallel clutched elastic actuator (CPEA) to reduce the energy consumption of active exoskeletons. This device operates with a passive load on the walking path of the hip joint [
49].
A robotic orthosis is proposed to provide gait assistance and rehabilitation to patients with neurological disorders (multiple sclerosis, post-poliomyelitis, and stroke) [
50]. The performance of the joint is based on the ARES technology developed at the Automation and Robotics Center. The ARES technology provides power and control to each joint. Likewise, Ref. [
51], in collaboration with [
50], mentions that the characteristics that this technology presents for human-machine interaction, such as small size, lightweight, and force control capability, cover the requirements of a knee joint in the design of active orthoses. In addition, they propose using this technology in a prototype orthosis called ATLAS, designed for children. The ATLAS device consists of two electric motors, four elastic elements (springs), linear rigid guides, adjustable rigid mechanisms, and torque sensors controlled by torque and position through a variable control (ARES) [
23,
52,
53,
54]. The same year proposed an active knee orthosis driven by a custom rotary serial elastic actuator (SEA). The proposed actuator includes a DC motor, a helical gear, and a torsion spring (see
Figure 8) [
42,
44].
Recent studies have shown a significant advance in the recovery of knee injuries when using an orthosis for rehabilitation treatment. Ref. [
55] proposes using a knee orthosis with two degrees of freedom joint design (see
Figure 9). He mentions that the use of the orthosis for lower extremities, specifically for the knee, supports rehabilitation in terms of walking speed, stride length, and the application of force in the limb at the time of flexion. Also, a robotic exoskeleton for knee joint assistance with low power consumption was proposed for industrial applications, which is based on a four-bar mechanism with a rotary actuator and a gas spring to accommodate a high power-to-weight ratio. This novel design can efficiently support the human body’s weight. The unique configuration selected allows this device to support the knee joint in the loading stages of static sitting and during the movement between standing and sitting [
38,
39,
56,
57,
58].
5.3. Hydraulic Actuators
The use of hydraulic actuators consists of implementing systems that work and are controlled by the physical properties of the fluids. Refs. [
59,
60,
61] presents a design summary and analysis of the Berkeley lower limb exoskeleton (BLEEX) design. The analysis presented shows the considerations and parameters taken for developing this exoskeleton and utilizing a hydraulic actuator. In the same way, devices for lower extremities have been developed, such as the HAL (Hybrid Assistive Limb) prototype, which by taking advantage of the viscoelastic properties of fluids and with the implementation of myoelectric control, it is possible to manipulate the movements of this robot very close to the muscles of humans [
62]. In [
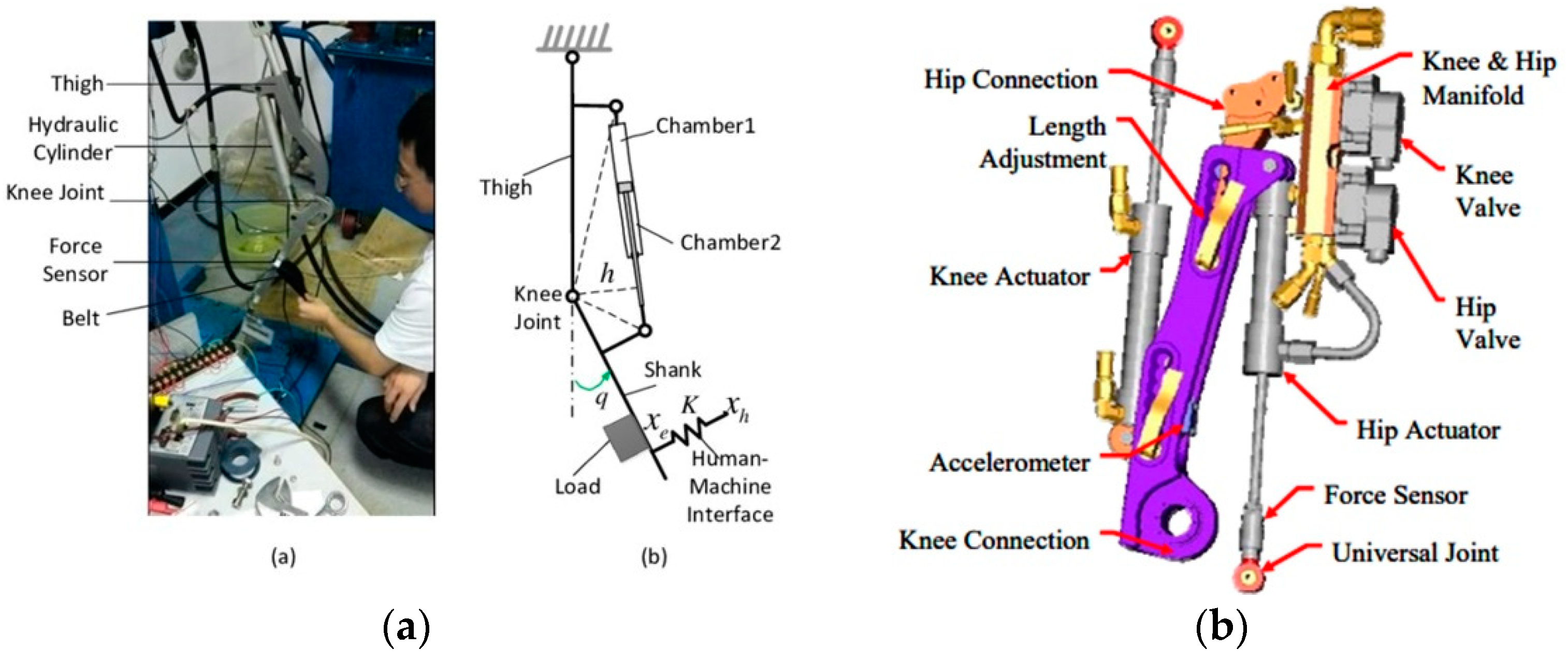
63], a dielectric elastomer actuator (DEA) is proposed that can be used as an artificial muscle, even replacing traditional actuators in active orthopedic and prosthetic applications. Ref. [
64] proposed a knee orthosis design with a mechanical system integrated with an electrohydraulic actuator for low-level motion tracking (see
Figure 10).
5.4. Pneumatic Actuators
The physical properties of the materials used in the field of pneumatics are considered in designing joints for extremities. Actuators that work with the properties of the gas have been developed. In 2005, Ferris realized a hinge-type system for an ankle-foot joint with carbon fiber housing and two pneumatic artificial muscles [
18]. In [
65], where they propose a pneumatic exoskeleton designed to reduce the muscular activity of the knee extensors during walking on a negative slope. The device consists of an air chamber that can be activated and deactivated by a solenoid valve. When activated, the air chamber resists knee flexion [
66,
67]. Likewise, the analysis and experimentation of a prototype of an active ankle-foot orthosis (AAFO), oriented to rehabilitate gait in a case study of a patient with a Myelomeningocele lumbosacral lesion. The pneumatic actuation system is integrated by a proportional pressure valve and a pneumatic artificial muscle as an active element of the AAFO [
62]. In 2010, an electrically assisted orthosis was proposed to help the elderly or those suffering from sports injuries to walk or climb stairs, consisting of a pneumatic muscle, a zigzag steel cable, a pressure valve with an electronic controller, a pressure shoe, and corresponding sensors. The steel wire performs the function of a torsion spring to pretension the pneumatic muscle (see
Figure 11) [
68,
69,
70,
71].
6. Control Systems
With the use of control systems and technological breakthroughs, more efficient, user-friendly control interfaces have been worked out so that the orthoses naturally replicate the joint’s movements. Myoelectric proportional control has been implemented and used to design orthoses with a mass of 1.6 kg tested on a 100 kg patient [
18,
72]. Integrated knee joint orthoses include three parts: the human-machine interface (due to the physical contact between man and machine through the design of adaptive robust control algorithms), a mechanical system 1-DOF, and the actuator [
64]. Orthoses designs using adjustable stiffness actuators (AwAS) are manipulated through closed-loop control, including four position sensors, one torque sensor, one optical encoder, and two magnetic encoders for motor position control, as well as the incorporation of a control system based on pressure sensors (inertial sensors) and the incorporation of an encoder for speed control [
20,
21,
22,
25,
27,
28]. ARES technology provides power and control to each joint through torque sensors, which control torque and position by considering the control of the variables. Torque and impedance controls are implemented to ensure safe patient interaction and enable new rehabilitation strategies. In addition, control algorithms have been built and implemented through the development of impedance control, which is integrated a PI position controller in cascade with the torque controller, where the external position controller determines the desired torque according to the position and velocity errors as well as the impedance parameters [
23,
49,
50,
51,
52,
53,
54]. Also, they have developed and used robust control algorithms applying PI, PD, PID control laws, or robust adaptive control algorithms to validate the feasibility of the orthosis and developed a fuzzy controller to perform walking assistance experiments [
23,
31,
32,
39,
42,
44,
64].
Proposals were made for powered knee orthoses designed to assist and improve gait function in patients. The control system of this orthopedic device is integrated with portable sensors, an inertial measuring unit (IMUs), force-sensitive resistors, torque sensors, angle, and electromyography, which allows the generation of rehabilitation tools and various techniques of movement assistance. A group of healthy users tested the orthoses to perform predefined trajectories during walking on flat terrain at different speeds [
34,
40,
73]. Ref. [
26] presents a robotic exoskeleton consisting of an active knee joint and a non-acting ankle joint. A control system constitutes this design with sensors (potentiometers and strain gauges located in the knee joint); S1–S4 are limb restraint bands; FSR (Force sensing resistor) are insoles placed in the feet, and four inertial sensors located along both legs (see
Figure 12) [
59,
60].
Ref. [
41] discusses the analysis, design, and evaluation of energetically autonomous knee exoskeletons to facilitate walking. In addition, it mentions that a key measure to demonstrate the effectiveness of performance-enhancing active leg exoskeleton or orthosis is the metabolic cost required to walk or run. This can be determined by measuring the rates of oxygen consumption and carbon dioxide production of a subject during the development of a physical task or through heart rate, calorimetry through the implementation and adequacy of control systems through the manipulation of myoelectrical signals, as well as the use of inertial modules [
34,
56,
66,
74,
75,
76]. In [
29,
35,
36,
65], a generic technique for estimating active joint stiffness based on an EMG-driven musculoskeletal model whose parameters are fitted using experimental data, through a lower extremity exoskeleton consisting of two link segments that are attached to the thigh and shank, respectively, and a rotational actuation system that drives joint are presented.
In addition, in [
42,
43,
44,
45,
46], control strategies for locking the clutch at maximum knee extension using a frequency gyroscope and a joint encoder are proposed. In [
34], a control system for knee orthosis is mentioned. The control strategy is based on the tacit learning scheme that generates set point increments according to the patient’s progress. Likewise, in [
47,
48], a device is proposed that has a clutched parallel elastic actuator (CPEA) with cascaded position control, and an iterative learning controller (ILC) superimposed on it.
Designs of mechanical devices in active or passive knee orthoses, either to transmit stability to the human gait or to transmit power and strength to the lower extremities, have achieved excellent results. These are for the coordination and programming of signal extraction and processing algorithms with the implementation of electrical sensors and/or IMUs, as well as the adaptation of control systems through PD, PI, PID control laws, robust controls, Arduino, and LabVIEW programming (see
Figure 13).
7. Discussion
The goal of designing and constructing orthoses is to improve both the mobility and quality of life of people with movement disabilities, as well as to encourage active user participation with the use of control strategy and methods for online adjustment of device components to provide free movement in the swing phase and to provide support to the knee joints during the stance phase as well as patterns that exhibit no significant differences in gait speed, percentage of the stance phase of the gait cycle and maximum flexion during the swing phase.
Currently, the integration of mechanical, electrical, electronic, hydraulic, and pneumatic systems, as well as the implementation of control systems, through the use of inertial sensors, myoelectric sensors, and signal processing techniques, have resulted in increasingly complex, complete, lightweight and adjustable orthoses for efficient use in the replication of human locomotion, becoming a support tool that can provide and complement the mechanisms of the ability to ambulate on any type of road and even up and down stairs.
Several works have been completed on knee orthoses. The challenges that continue to be addressed are the mechanical design of the structure, control systems to synchronize the orthosis with the user’s movement, coordination algorithms, and power transmission systems for the required movements and forces.
Table 3 summarizes the characteristics of the active orthoses mentioned in in
Section 4,
Section 5 and
Section 6 of this work.
8. Conclusions
The achievements in the design and construction of orthopedic devices are impressive. However, there are still a lot of design challenges such as weight, cost, manufacturing materials, volume, motion restrictions to replicate knee biomechanics, joint stability, easy access, adaptability, and metabolic cost, among others, to make these devices biomechanically easy to use and commercially viable.
From the literature reviewed and from an engineering perspective, normal gait, actuator technology, and control strategies are considered to design active lower limb orthoses to reduce biomechanical disorders such as gait asymmetry or high metabolic cost. The main focus is on aspects such as the design and construction of the actuators and/or knee joints or the improvement of the user’s ambulatory capabilities, obtaining a wide variety of systems to create novel, compact, efficient designs, and minimizing the energy consumption of the device itself. Regardless of these and other functional objectives, the design of orthoses should be focused on reducing metabolic expenditure, since when designing these devices incorporated: mechanical systems, actuators, sensors, control systems, and power supplies, causing the designs to increase their mass because of this it is necessary to continue working and printing efforts to achieve good results.
Metabolic expenditure is considered an indicator with little influence on the design and development of orthopedic systems such as knee orthoses since the efficiency of these devices is measured through results such as: in the design of mechanical systems, application, and development of actuators (joints), obtaining the degrees of movement of the limbs. Thus metabolic expenditure is left in the background. As designs, hardware, and control systems improve, robotic systems will have an energetic benefit to the user when walking and running. From the study conducted, little research has shown a statistically significant decrease in metabolic expenditure during locomotion. In addition, motorized orthoses of proposed research designs and commercially with high mass due to the constitution of the design itself are robust and heavy due to the limitations of the use of passive elements in the actuation systems and the low performance of the complex control algorithms, which implies the elevation of metabolic expenditure. Likewise, light designs are presented about the weight of the limb, which leads to minimizing metabolic expenditure [
33,
41,
77,
78]. For this reason, decreasing metabolic expenditure is another future challenge in the field of optimization and energy efficiency of actuation mechanisms and power sources to develop more autonomous active lower limb prostheses.
The use of orthoses considerably improves and accelerates the recovery of people with walking impairment and facilitates the work of rehabilitation specialists. It should be remembered that the challenges of replicating human locomotion are still in progress to achieve lower limb movements naturally. It is necessary to continue working on designing and developing these orthopedic devices. We believe that these challenges will guide future research work to design and manufacture complex, lightweight, accessible, and energy-efficient devices for use in rehabilitation processes or the development of their daily activities.
Author Contributions
Conceptualization, A.B.S. and A.B.O.; Methodology, A.B.S., A.B.O., C.H.G.V. and E.M.R.; Software, F.A.G.B., C.H.G.V. and A.A.P.; Validation, E.M.R., A.A.P. and R.C.A.; Formal Analysis, A.B.S., A.B.O. and F.A.G.B.; Investigation, A.B.S. and A.B.O.; Resources, A.B.O.; Data Curation, E.M.R. and C.H.G.V.; Writing—Original Draft Preparation, A.B.S.; Writing—Review & Editing, A.B.S. and A.B.O.; Visualization, A.A.P., C.H.G.V. and R.C.A.; Supervision, A.B.S., and A.B.O.; Project Administration, A.B.S., A.B.O. and F.A.G.B.; Funding Acquisition, A.B.S., A.B.O. and R.C.A. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been carried out under the financing of the National Council for Research and Technological Development through doctoral support for researchers.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors thank the Tecnológico Nacional de México and the Centro Nacional de Investigación y Desarrollo Tecnológico for the support provided to carry out this work. Agustín Barrera Sánchez thanks CONACYT for the scholarship granted to carry out his postgraduate studies.
Conflicts of Interest
The authors have declared that they have no conflict of interest in the publication of this manuscript.
References
- Uresti, B.R.E.; Ramírez, M.L.A.; Sáenz, B.L.; Gámez, C.E.; López, G.R.A. Órtesis multifuncional adaptable para movilidad de extremidad inferior. In Proceedings of the VII Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud, Puebla, Mexico, 16–18 June 2016. [Google Scholar] [CrossRef]
- Peña, C.J. Lesiones de Rodilla Más Comunes en México. 2009. Available online: https://blog.planseguro.com.mx/lesiones-de-rodilla-mas-comunes-en-mexico (accessed on 10 October 2021).
- Ferris, D.; Sawicki, G.; Domingo, A. Powered lower limb orthoses for gait rehabilitation. Top. Spinal Cord Inj. Rehabil. 2005, 11, 34–49. [Google Scholar] [CrossRef] [PubMed]
- Popovic, M.B. Powered orthotics: Enabling brace technologies for upper and lower limbs. In Biomechatronics; Elsevier: Amsterdam, The Netherlands, 2019; pp. 279–301. [Google Scholar] [CrossRef]
- Vargas, N.F. Indicaciones de las órtesis en atención primaria. FMC—Form. Médica Contin. En Atención Primaria 2017, 24, 465–478. [Google Scholar] [CrossRef]
- Muñoz, A.; Pelliccioni, O.; Müller-Karger, C. Diseño y construcción de un prototipo de bitutor largo de tipo kafo termoconformado. In Proceedings of the 9th Congreso Iberoamericano de Ingeniería Mecánica, La Plata, Argentina, 17–20 November 2007. [Google Scholar]
- Chui, K.; Milagros, J.; Sheng-Che, Y.; Lusardi, M. Orthotics and Prosthetics in Rehabilitation, 4th ed.; Saunders: Philadelphia, PA, USA, 2019; p. 294. ISBN 9780323676915. [Google Scholar]
- Amaia, I.A. Análisis Dinámico de las Fuerzas de Contacto Órtesis Pierna Mediante un Modelo Biomecánico Tridimensional. Master’s Thesis, Universidad Politécnica de Catalunya, Barcelona, Spain, 2 June 2014. [Google Scholar]
- Romero, S.M.A. Diseño y Construcción de una Órtesis de Rodilla, Destinada a la Rehabilitación Automatizada de la Extremidad Inferior. Master’s Thesis, Universidad Politécnica Salesiana, Sede Cuenca, Ecuador, September 2012. [Google Scholar]
- Quintero-Quiroz, C.; Pérez, V.Z. Materials for lower limb prosthetic and orthotic interfaces and sockets: Evolution and associated skin problems. Rev. De La Fac. De Med. 2019, 67, 117–125. [Google Scholar] [CrossRef]
- Butler, P.B.; Evans, G.A.; Rose, G.K.; Patrick, J.H. A review of selected knee orthoses. Rheumatology 1983, 22, 109–120. [Google Scholar] [CrossRef]
- Carlson, J.M.; French, J. Knee orthoses for valgus protection. Experiments on 11 designs with related analyses of orthosis length and rigidity. Clin. Orthop. Relat. Res. 1989, 247, 175–192. [Google Scholar] [CrossRef]
- Knee Ankle Foot Orthoses: A Quick Guide. Available online: https://www.buchanan-clinic.co.uk/blog/Knee-Ankle-Foot-Orthoses-A-quick-guide (accessed on 14 February 2022).
- Stills, M.L. Knee joint materials and components. In Clinical Prosthetics and Orthotics; The American Academy of Orthotics and Prosthetics: Falls Church, VA, USA, 1987; pp. 91–94. [Google Scholar]
- Budarick, A.R.; Bishop, E.L.; Clark, M.L.; Cowper-Smith, C.D. Preliminary evaluation of a new orthotic for patellofemoral and multicompartment knee osteoarthritis. Rehabil. Res. Pract. 2021, 2021, 5923721. [Google Scholar] [CrossRef]
- Becker Orthopedic. Available online: https://www.beckerorthopedic.com/Product/KneeJoints (accessed on 17 February 2022).
- Aliman, N.; Ramli, R.; Haris, S. Design and development of lower limb exoskeletons: A survey. Robot. Auton. Syst. 2017, 95, 102–116. [Google Scholar] [CrossRef]
- Ferris, D.P.; Czerniecki, J.M.; Hannaford, B. An ankle-foot orthosis powered by artificial pneumatic muscles. J. Appl. Biomech. 2005, 21, 189–197. [Google Scholar] [CrossRef] [PubMed]
- Veale, A.J.; Xie, S.Q. Towards compliant and wearable robotic orthoses: A review of current and emerging actuator technologies. Med. Eng. Phys. 2016, 38, 317–325. [Google Scholar] [CrossRef]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. A novel actuator with adjustable stiffness (AwAS). In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4201–4206. [Google Scholar] [CrossRef]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. AwAS-II: A new Actuator with Adjustable Stiffness based on the novel principle of the adaptable pivot point and variable lever ratio. In Proceedings of the IEEE 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 4638–4643. [Google Scholar] [CrossRef]
- Bacek, T.; Moltedo, M.; Langlois, K.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. A novel modular compliant knee joint actuator for use in assistive and rehabilitation orthoses. In Proceedings of the IEEE 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, USA, 24–28 September 2017; pp. 5812–5817. [Google Scholar] [CrossRef]
- Cestari, M.; Sanz-Merodio, D.; García, E. A new and versatile adjustable rigidity actuator with add-on locking mechanism (ARES-XL). Actuators 2018, 7, 1. [Google Scholar] [CrossRef]
- Liu, L.; Kramer, M.; Leonhardt, S.; Misgeld, B.J.E. Design and modeling of a mechanical rotational impedance actuator. In Proceedings of the VDI Mechatronik 2015, Dortmund, Germany, 12–13 March 2015. [Google Scholar]
- Ashrafiuon, H.; Grosh, K.; Burke, K.J.; Bommer, K. An intelligent exoskeleton for lower limb rehabilitation. In Proceedings of the ASME 2010 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Montreal, QC, Canada, 15–18 August 2010; Volume 2: 34th Annual Mechanisms and Robotics Conference, Parts A and B. pp. 3–9. [Google Scholar] [CrossRef]
- Lora, M.J.S.; Hidalgo, R.A.F.; Rocon de Lima, E. Diseño de una Órtesis Activa de Rodilla Para la Evaluación de Algoritmos de Asistencia Robótica en Sujetos Hemiparéticos; Centro de Automática y Robótica (CAR-CSIC): Madrid, Spain, 2018. [Google Scholar]
- Font-Llagunes, J.M.; Arroyo, G.; Alonso, F.J.; Vinagre, B.M. Diseño de una órtesis activa para ayuda a la marcha de lesionados medulares. In Proceedings of the XVIII Congreso Nacional de Ingeniería Mecánica, Ciudad Real, Spain, 3–5 November 2010. [Google Scholar]
- Cai, V.A.D.; Bidaud, P.; Hayward, V.; Gosselin, F.; Desailly, E. Self-adjusting, an isostatic exoskeleton for the human knee joint. In Proceedings of the IEEE 2011 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 612–618. [Google Scholar] [CrossRef]
- Zhu, H.; Nesler, C.; Divekar, N.; Ahmad, M.T.; Gregg, R.D. Design and validation of a partial-assist knee orthosis with compact, backdrivable actuation. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 917–924. [Google Scholar] [CrossRef]
- Yusof, A.S.; Che-Ani, A.I.; Hussain, Z.; Hamzah, N.; Yahaya, S.Z. Design and development: Actuator of powered knee orthosis a prototype. In Proceedings of the 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November 2016; pp. 575–579. [Google Scholar] [CrossRef]
- Shan, H.; Jiang, C.; Mao, Y.; Wang, X. Design and control of a wearable active knee orthosis for walking assistance. In Proceedings of the 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016; pp. 51–56. [Google Scholar] [CrossRef]
- Moon, D.H.; Kim, D.; Hong, Y.D. Development of a single leg knee exoskeleton and sensing knee center of rotation change for intention detection. Sensors 2019, 19, 3960. [Google Scholar] [CrossRef] [PubMed]
- Claros, M.J.; Soto, R.; Gordillo, J.L.; Pons, J.L.; Contreras-Vidal, J.L. Robotic assistance of human motion using active-back drivability on a geared electromagnetic motor. Int. J. Adv. Robot. Syst. 2016, 13, 62331. [Google Scholar] [CrossRef]
- Cantu, C.; Tamez-Duque, J.; Shimoda, S.; Soto, R. Design of a control system for a knee rehabilitation orthosis using a recovery status. In Proceedings of the 2017 International Symposium on Wearable Robotics and Rehabilitation (WeRob), Houston, TX, USA, 5–8 November 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Karavas, N.; Ajoudani, A.; Tsagarakis, N.; Caldwell, D. Human-inspired balancing assistance: Application to a knee exoskeleton. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 292–297. [Google Scholar] [CrossRef]
- Karavas, N.; Ajoudani, A.; Tsagarakis, N.; Caldwell, D.; Saglia, J.; Bicchi, A. Tele-impedance based assistive control for a compliant knee exoskeleton. Robot. Auton. Syst. 2015, 73, 78–90. [Google Scholar] [CrossRef]
- Mahmoudi Khomami, A.; Najafi, F. A survey on soft lower limb cable-driven wearable robots without rigid links and joints. Robot. Auton. Syst. 2021, 144, 103846. [Google Scholar] [CrossRef]
- Kim, J.H.; Noh, J.; Yang, W. Knee-Assistive Robotic Exoskeleton (KARE-1) using a conditionally singular mechanism for industrial field applications. Appl. Sci. 2020, 10, 5141. [Google Scholar] [CrossRef]
- Maxwell, S.; Elliott, R. Design and validation of a torque-controllable knee exoskeleton for sit-to-stand assistance. IEEE/ASME Trans. Mechatron. 2017, 22, 1695–1704. [Google Scholar] [CrossRef]
- Thapa, S.; Zheng, H.; Kogler, G.F.; Shen, X. A Robotic Knee Orthosis for Sit-to-Stand Assistance. In Proceedings of the ASME 2016 Dynamic Systems and Control Conference, Minneapolis, MN, USA, 12–14 October 2016. Volume 1: Advances in Control Design Methods, Nonlinear and Optimal Control, Robotics, and Wind Energy Systems; Aerospace Applications; Assistive and Rehabilitation Robotics; Assistive Robotics; Battery and Oil and Gas Systems; Bioengineering Applications; Biomedical and Neural Systems Modeling, Diagnostics and Healthcare; Control and Monitoring of Vibratory Systems; Diagnostics and Detection; Energy Harvesting; Estimation and Identification; Fuel Cells/Energy Storage; Intelligent Transportation, V001T07A004. [Google Scholar] [CrossRef]
- Elliott, G.; Marecki, A.; Herr, H. Design of a clutch–spring knee exoskeleton for Running. J. Med. Devices. 2014, 8, 031002. [Google Scholar] [CrossRef]
- Dos Santos, W.M.; Caurin, G.A.P.; Siqueira, A.A.G. Design and control of an active knee orthosis driven by a rotary Series Elastic Actuator. Control Eng. Pract. 2017, 58, 307–318. [Google Scholar] [CrossRef]
- Dollar, A.M.; Herr, H. Design of a quasi-passive knee exoskeleton to assist running. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 747–754. [Google Scholar] [CrossRef]
- Groothuis, S.S.; Rusticelli, G.; Zucchelli, A.; Stramigioli, S.; Carloni, R. The variable stiffness actuator vsaUT-II: Mechanical design, modeling, and identification. IEEE/ASME Trans. Mechatron. 2014, 19, 589–597. [Google Scholar] [CrossRef]
- Kong, K.; Bae, J.; Tomizuka, M. A compact rotary series elastic actuator for human assistive systems. IEEE/ASME Trans. Mechatron. 2011, 17, 288–297. [Google Scholar] [CrossRef]
- Vadiati, A.; Bagheri, A.; Mahjoob, M.J.; Sadigh, M.J. Design, control, and prototyping of a series elastic actuator for an active knee orthosis. Eng. Solid Mech. 2018, 6, 241–252. [Google Scholar] [CrossRef]
- Chinimilli, P.T.; Qiao, Z.; Sorkhabadi, S.M.R.; Jhawar, V.; Fong, I.H.; Zhang, W. Automatic virtual impedance adaptation of a knee exoskeleton for personalized walking assistance. Robot. Auton. Syst. 2019, 114, 66–76. [Google Scholar] [CrossRef]
- Penzlin, B.; Fincan, M.E.; Li, Y.; Ji, L.; Leonhardt, S.; Ngo, C. Design and analysis of a clutched parallel elastic actuator. Actuators 2019, 8, 67. [Google Scholar] [CrossRef]
- Pratt, J.E.; Collins, S.H.; Krupp, V.; Morse, C.J. The RoboKnee: An exoskeleton for enhancing strength and endurance during walking. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 3, pp. 2430–2435. [Google Scholar] [CrossRef]
- García, E.; Sanz-Merodio, D.; Cestari, M.; Perez, M.; Sancho, J. An active knee orthosis for the physical therapy of neurological disorders. Adv. Intell. Syst. Comput. 2015, 418, 327–337. [Google Scholar]
- Cestari, M.; García, E.; Sanz-Merodio, D.; Arevalo, J.C. An adjustable compliant joint for lower-limb exoskeletons. IEEE/ASME Trans. Mechatron. 2015, 20, 889–898. [Google Scholar] [CrossRef]
- Cestari, M.; Sanz-Merodio, D.; Arevalo, J.C.; Garcia, E. ARES, a variable stiffness actuator with embedded force sensor for the ATLAS exoskeleton. Ind. Robot. Int. J. 2014, 41, 518–526. [Google Scholar] [CrossRef]
- Sanz-Merodio, D.; Cestari, M.; Arevalo, J.C.; Carrillo, X.A.; Garcia, E. Generation and control of adaptive gaits in lower-limb exoskeletons for motion assistance. Adv. Robot. 2014, 28, 329–338. [Google Scholar] [CrossRef]
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Fesharaki, S.A.; Farahmand, F.; Saeedi, H.; Raeissadat, S.A.; Abdollahy, E.; Ahmadi, A.; Maroufi, N. The effects of knee orthosis with two degrees of freedom joint design on gait and sit-to-stand task in patients with medial knee osteoarthritis. Sultan Qaboos Univ. Med. J. 2020, 20, e324–e331. [Google Scholar] [CrossRef]
- Lee, D.; Kwak, E.C.; McLain, B.J.; Kang, I.; Young, A.J. Effects of assistance during early stance phase using a robotic knee orthosis on energetics, muscle activity, and joint mechanics during incline and decline walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 914–923. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, Z.; Mai, J.; Wang, Q. Real-time mode recognition based assistive torque control of bionic knee exoskeleton for sit-to-stand and stand-to-sit transitions. Robot. Auton. Syst. 2019, 119, 209–220. [Google Scholar] [CrossRef]
- Ito, R.; Oppata, Y.; Katsumura, M.; Yano, K.; Kobayashi, Y.; Krebs, H.I. Robotic knee orthosis to prevent falling during a standing up assistance. In Proceedings of the 2020 IEEE Region 10 Symposium (TENSYMP), Dhaka, Bangladesh, 5–7 June 2020. [Google Scholar] [CrossRef]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Ghan, J.; Steger, R.; Kazerooni, H. Control and system identification for the Berkeley lower extremity exoskeleton (BLEEX). Adv. Robot. 2006, 20, 989–1014. [Google Scholar] [CrossRef]
- Zoss, A.; Kazerooni, H. Architecture and hydraulics of a lower extremity exoskeleton. In Proceedings of the ASME 2005 International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2005. [Google Scholar] [CrossRef]
- Hayashi, T.; Kawamoto, H.; Sankai, Y. The control method of the robot suit HAL working as an operator’s muscle using biological and dynamical information. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar] [CrossRef]
- Mulgaonkar, A.; Kornbluh, R.; Herr, H. A new frontier for orthotics and prosthetics: Application of dielectric elastomer actuators to bionics. In Dielectric Elastomers as Electromechanical Transducers; Elsevier Science: Amsterdam, The Netherlands, 2008; pp. 189–206. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Z.; Yao, B.; Zhu, X.; Zhu, S.; Wang, Q.; Song, Y. Adaptive robust cascade force control of 1-DOF hydraulic exoskeleton for human performance augmentation. IEEE/ASME Trans. Mechatron. 2016, 22, 589–600. [Google Scholar] [CrossRef]
- Rogers, E.; Polygerinos, P.; Allen, S.; Panizzolo, F.A.; Walsh, C.J.; Holland, D.P. A quasi-passive knee exoskeleton to assist during descent. In Biosystems and Biorobotics; Springer International Publishing: Cham, Switzerland, 2017; Volume 16. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Chen, C.; Wang, W.; He, L.; Mao, X.; Xu, G.; Zhao, G.; Li, X.; Dong, W. Development and analysis of an electrically actuated lower extremity assistive exoskeleton. J. Bionic Eng. 2017, 14, 272–283. [Google Scholar] [CrossRef]
- Ashmi, M.; Anila, M.; Sivanandan, K.S. Comparison of SMC and PID controllers for pneumatically powered knee orthosis. J. Control Autom. Electr. Syst. 2021, 32, 1153–1163. [Google Scholar] [CrossRef]
- Lescano, N.C.; Rodrigo, E.S. Plataforma de Desarrollo de Órtesis Robótica de Tobillo-pie.—Descripción del Prototipo Experimental; Gabinete de Tecnología Médica, Departamento de Electrónica y Automática, Facultad de Ingeniería, Universidad Nacional de San Juan: San Juan, Argentina, 2018. [Google Scholar]
- Yeh, T.-J.; Wu, M.-J.; Lu, T.-J.; Wu, F.-K.; Huang, C.-R. Control of McKibben pneumatic muscles for a power-assist, lower-limb orthosis. Mechatronics 2010, 20, 686–697. [Google Scholar] [CrossRef]
- Li, S.; Meng, D.; Tang, C.; Zhong, W.; Li, A. Adaptive robust precision motion control of single PAM actuated servo systems with non-local memory hysteresis force compensation. ISA Trans. 2021, 112, 337–349. [Google Scholar] [CrossRef]
- Wu, S.-K.; Driver, T.; Shen, X. Design and control of a pneumatically actuated lower-extremity orthosis. J. Med. Devices 2012, 6, 041004. [Google Scholar] [CrossRef]
- Beyl, P.; Naudet, J.; Van Ham, R.; Lefeber, D. Mechanical design of an active knee orthosis for gait rehabilitation. In Proceedings of the IEEE 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 100–105. [Google Scholar] [CrossRef]
- Félix, P.; Figueiredo, J.; Santos, C.P.; Moreno, J.C. Powered knee orthosis for human gait rehabilitation: First advances. In Proceedings of the 2017 IEEE 5th Portuguese Meeting on Bioengineering (ENBENG), Coimbra, Portugal, 16–18 February 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Donelan, M.; Kram, R.; Kuo, A. Mechanical work for step-to-step transitions is a major determinant of the metabolic cost of human walking. J. Exp. Biol. 2003, 205, 3717–3727. [Google Scholar] [CrossRef]
- Young, A.; Ferris, D. State-of-the-art and future directions for robotic lower limb exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Pinto-Fernandez, D.; Torricelli, D.; Sanchez-Villamanan, M.D.C.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance evaluation of lower limb exoskeletons: A systematic review. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef] [PubMed]
- Ferris, D.P.; Sawicki, G.S.; Daley, M.A. A physiologist’s perspective on robotic exoskeletons for human locomotion. Int. J. Hum. Robot. 2007, 4, 507–528. [Google Scholar] [CrossRef] [PubMed]
- Walsh, C.J.; Paluska, D.; Pasch, K.; Grand, W.; Valiente, A.; Herr, H. Development of a lightweight, underactuated exoskeleton for load-carrying augmentation. In Proceedings of the IEEE 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 3485–3491. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}