On the Numerical Solution of Ordinary, Interval and Fuzzy Differential Equations by Use of F-Transform




Abstract
1. Introduction
2. Preliminaries
- for (), for , for ;
- for all and for all ;
- for , is increasing on and decreasing on , is decreasing on , is increasing of .
- 1.
- for any positive real ε, there exists a fuzzy partition such that the corresponding iF-transform satisfy
- 2.
- for all ,where .
- 3.
- the direct and inverse F-transforms are linear, i.e., for any and for any two continuous functions , with direct F-transforms and with respect to the same partition ; then
- 3.1.
- the direct F-transforms of and are, respectively, and ,
- 3.2.
- the inverse F-transform of and are, respectively, and .
- (i)
- the iF-transform satisfies
- (ii)
- if f ang g have the same direct F-transform components , then
3. Numerical Solution of Initial-Value ODE by F-Transform
3.1. An F-Transform Algorithm for ODE
- Step 1.
- Step 2.
- For , compute the solutions of Equation (23) and define
- Step 3.
- The final value (corresponding to ) is the desired approximation of with as .
3.2. Extension to Systems of ODEs
3.3. The Case of Linear ODE
4. Computational Results for ODEs
4.1. ODEs with Known Exact Solutions
- -
- MFT = … number M of points where the solution is computed;
- -
- N = Number of nodes in the partition ;
- -
- hstep = … step size h used on each subinterval , ;
- -
- FunctionEvaluations = total number of function evaluations required by algorithm ODE-FT.
- -
- Final FT value = …(final value found for at , ;
- -
- AveErrFT = Average absolute error , ;
- -
- MaxErrFT = Maximum absolute error , ;
- -
- Final Exact value = …(final value of at , ;
- -
- Error in Final value = (, )
- AveErrFT =
- MaxErrFT = (0.004132636807097, 0.000295217766130),
- Final FT:
- Final Exact:
- Final Error: Errx(1) = Errx(2) =
- AveErrFT =
- MaxErrFT =
- Final FT:
- Final Exact:
- Final Error: Errx(1) = Errx(2) =
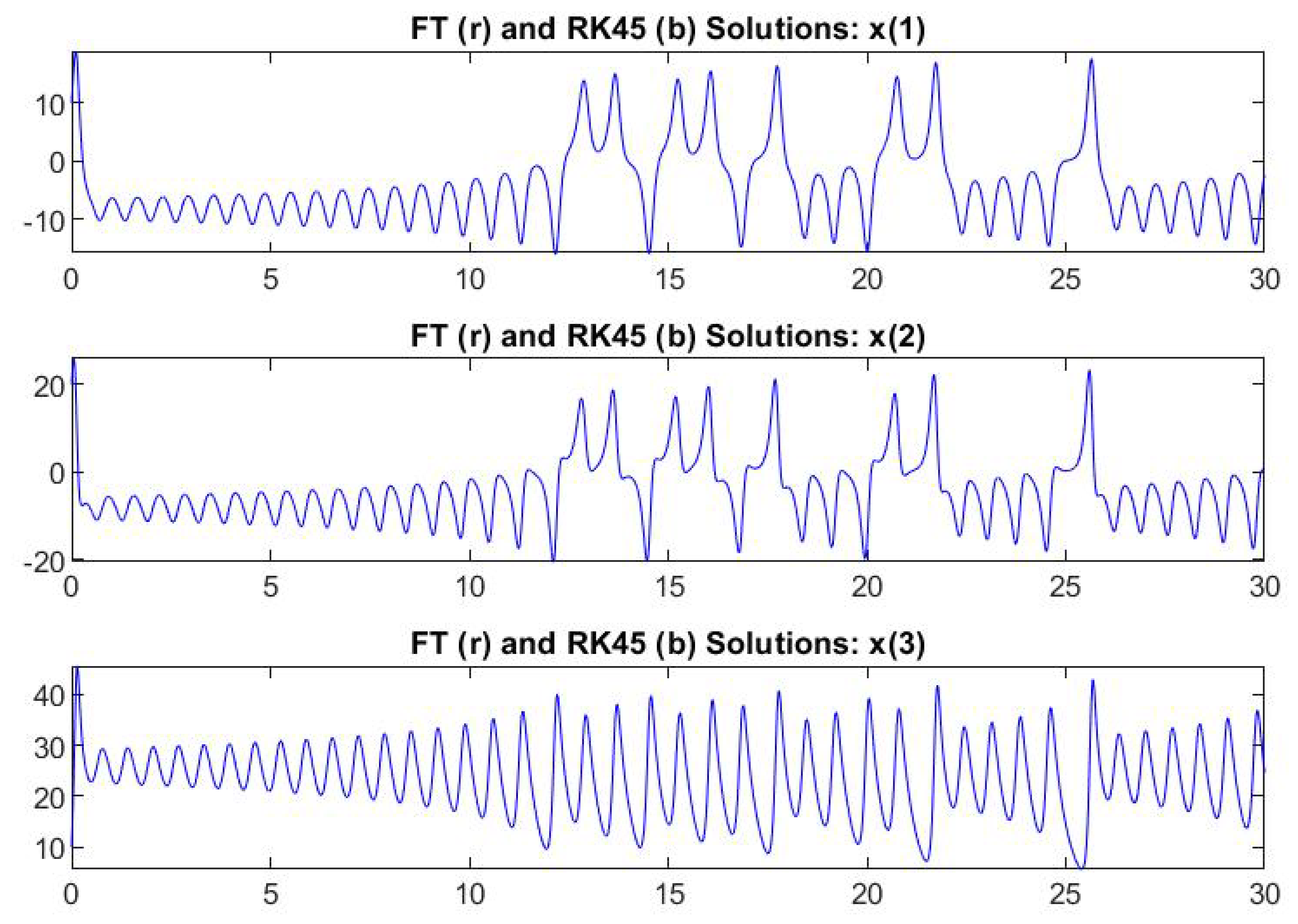
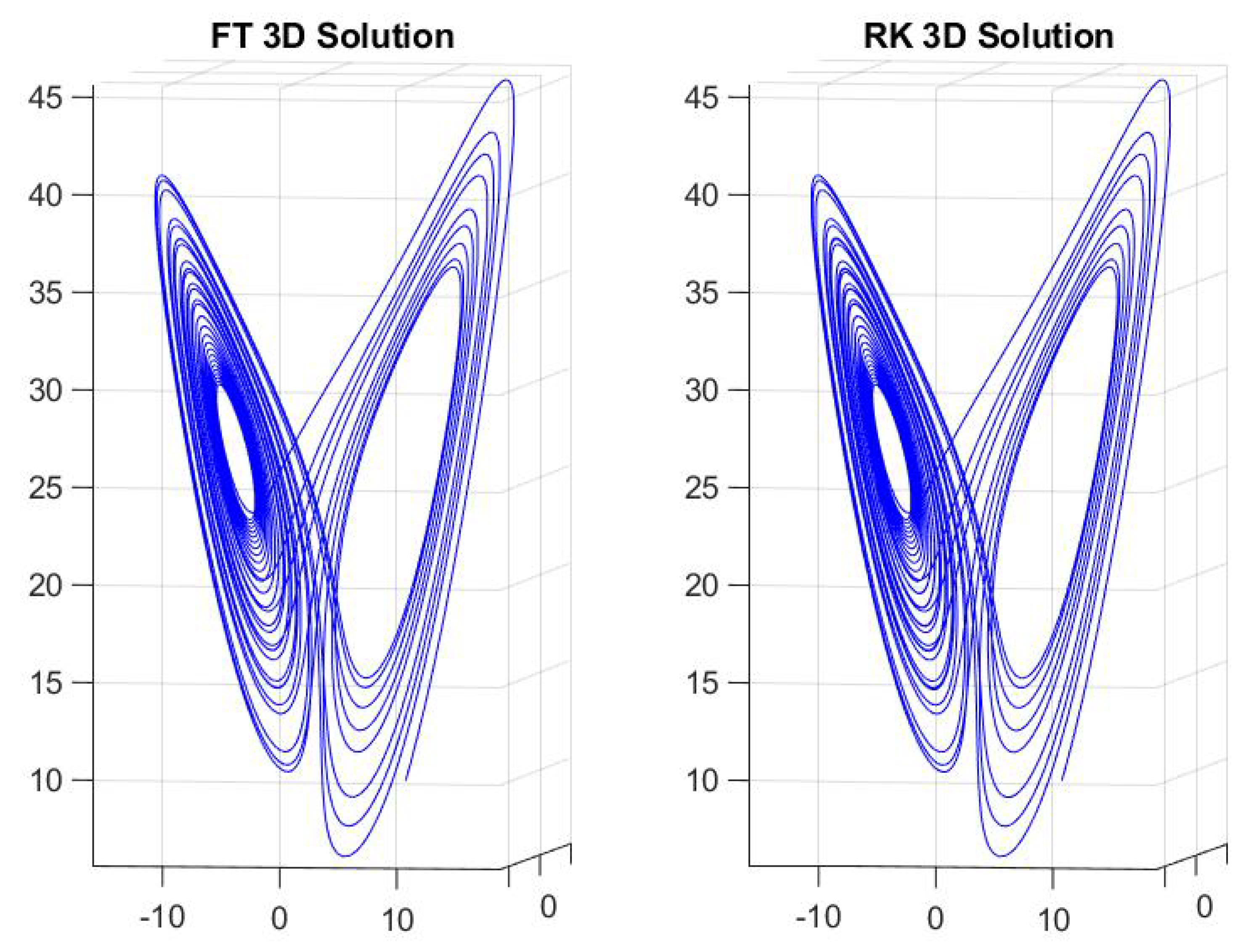
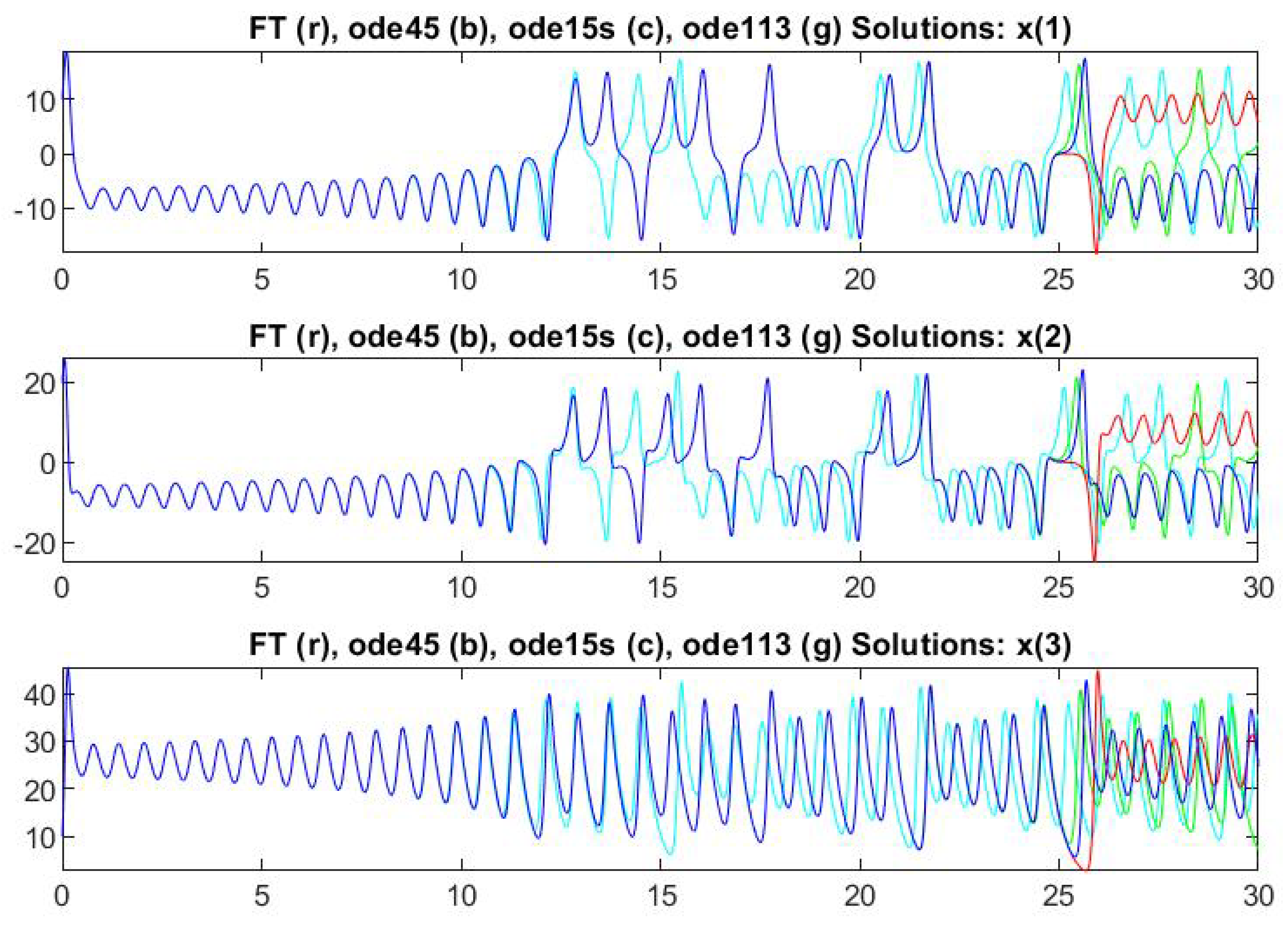
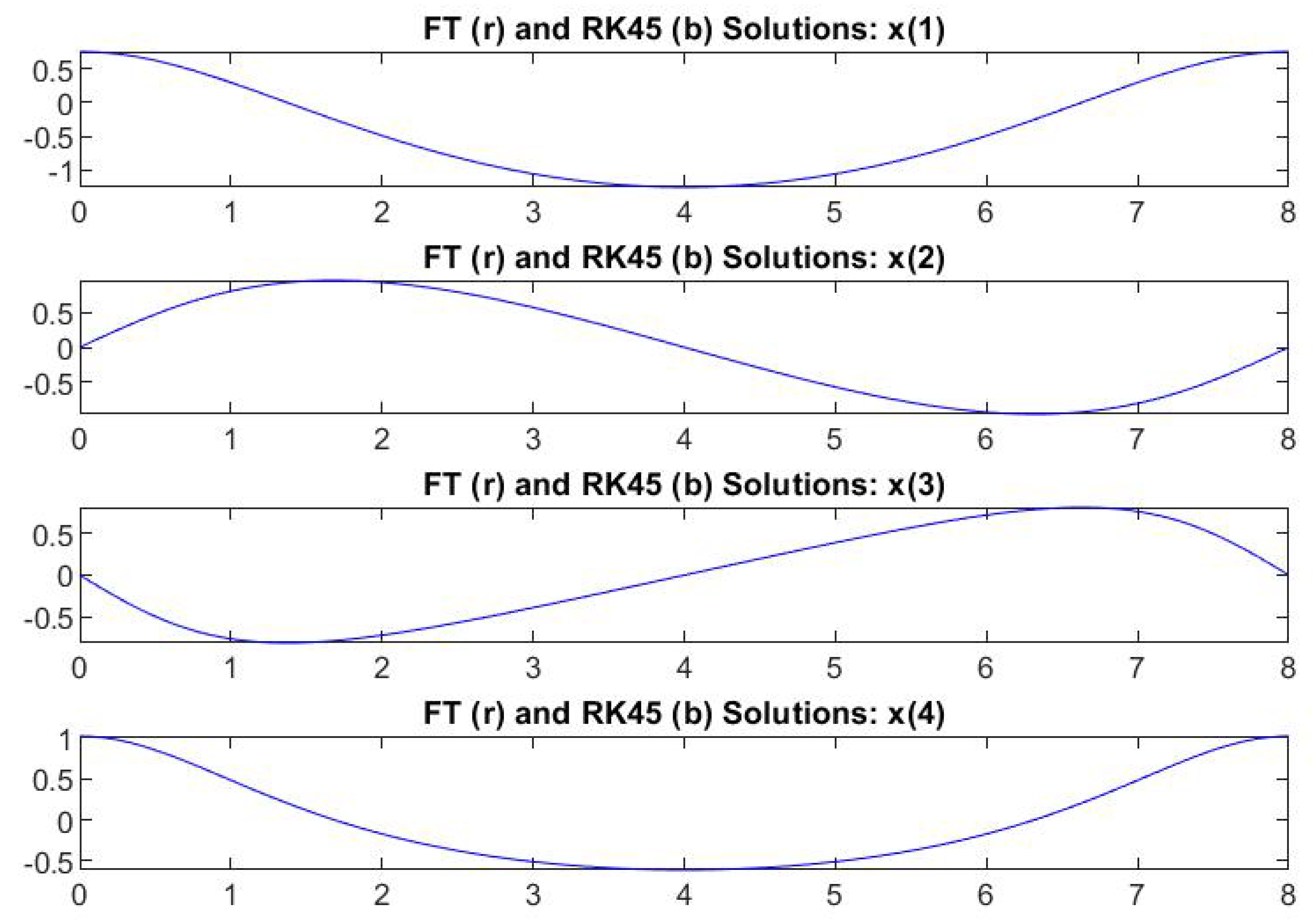
4.2. ODEs without Known Closed-Form Solution
5. Interval (Fuzzy) Differential Equations and F-Transform
- -
- If is an interval-valued function, its gH-derivative at is defined to be the limit, if it exists,
- -
- If is a fuzzy-valued function, its level-wise gH-derivative (LgH-derivative for short) at is defined to be the family of the gH-derivatives of , if they exist for all , i.e.,
- -
- is (i)-gH-differentiable at if
- -
- F is (ii)-gH-differentiable at if
5.1. Numerical Interval ODE by F-Transform
- (1)
- is gH-differentiable with and .
- (2)
- If all the gH-differences are of the same type for all t, then is gH-differentiable with and .
- (1)
- If the intervals , are such thatthen defined on as in (46) is a solution of (40).
- (2)
- (a)
- ifis a (i)-to-(ii) switch, then
- (b)
- ifis a (ii)-to-(i) switch, then
- (c)
- ifis (i)-gH- differentiable on, then
- (d)
- ifis (ii)-gH- differentiable on, then
- (a)
- a (i)-to-(ii) switch is decided at if the following condition is reached
- (b)
- a (ii)-to-(i) switch is decided at if the following condition is reached
- (1)
- If is computed according to (i)-gH-differentiability on , i.e., and if , then is assumed to be a (i)-to-(ii) switch and the next iteration is performed according to (ii)-gH-differentiability.
- (2)
- If is computed according to (ii)-gH-differentiability on , i.e., and if , then is assumed to be a (ii)-to-(i) switch and the next iteration is performed according to (i)-gH-differentiability.
5.2. Numerical Procedure for IDE
- Step 1.
- Chose one of the two models (45) or (46) to start with, say for (i)-gH-differentiability (increasing length) and for (ii)-gH-differentiability (decreasing length); chose a positive tolerance to test for switching; chose , set so that for and chose a family of basic functions.
- Step 2.
- Compute . Set , .
- Step 3.
- For , the interval-valued components , are first approximated iteratively by finding as a fixed pointorand . Set the new solution interval value for as
- Step 4.
- (Test for a switching at ) If , then is declared to be a switch of gH-differentiability: if so, exchange the value of from 1 to 2 or from 2 to 1; set , . If instead , then is not a switch: in this case, update H to , without changing .
- Step 5.
- Continue from step 3 with next k, until the final point is reached.
5.3. Application to Fuzzy Differential Equations
6. Computational Results for Interval and Fuzzy Differential Equations
7. Concluding Comments and Further Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Perfilieva, I. Fuzzy Transforms: Theory and Applications. Fuzzy Sets Syst. 2006, 157, 993–1023. [Google Scholar] [CrossRef]
- Perfilieva, I. Fuzzy Transforms: A challenge to conventional transform. In Advances in Images and Electron Physics; Hawkes, P.W., Ed.; Elsevier Academic Press: Cambridge, CA, USA, 2007; Volume 147, pp. 137–196. [Google Scholar]
- Coroianu, L.; Stefanini, L. General approximation of fuzzy numbers by F-transform. Fuzzy Sets Syst. 2016, 288, 46–74. [Google Scholar] [CrossRef]
- Coroianu, L.; Stefanini, L. Properties of fuzzy transform obtained from Lp minimization and a connection with Zadeh’s extension principle. Inf. Sci. 2019, 478, 331–354. [Google Scholar] [CrossRef]
- Guerra, M.L.; Stefanini, L. Quantile and expectile smoothing based on L1-norm and L2-norm fuzzy transforms. Int. J. Approx. Reason. 2019, 107, 17–43. [Google Scholar] [CrossRef]
- Perfilieva, I.; de Baets, B. Fuzzy transforms of monotone functions with applications to image compression. Inf. Sci. 2010, 180, 3304–3315. [Google Scholar] [CrossRef]
- Perfilieva, I.; Novak, V.; Dvorak, A. Fuzzy transform in the analysis of data. Int. J. Approx. Reason. 2008, 48, 36–46. [Google Scholar] [CrossRef]
- Stefanini, L. Fuzzy Transform with Parametric LU-Fuzzy Partitions. In Computational Intelligence in Decision and Control; Ruan et Al, D., Ed.; World Scientific: Singapore, 2008; pp. 399–404. [Google Scholar]
- Stefanini, L. Fuzzy Transform and Smooth Functions. In Proceedings of the IFSA-EUSFLAT 2009 Conference, Lisbon, Portugal, 20–24 July 2009; pp. 579–584. [Google Scholar]
- Stefanini, L. F-Transform with Parametric Generalized Fuzzy Partitions. Fuzzy Sets Syst. 2011, 180, 98–120. [Google Scholar] [CrossRef]
- Zeinali, M.; Alikhani, R.; Shahmorad, S.; Bahrani, F.; Perfilieva, I. On the structural properties of Fm-transform with applications. Fuzzy Sets Syst. 2018, 342, 32–52. [Google Scholar] [CrossRef]
- Ahmad, M.Z.; Hasan, M.K.; de Baets, B. Analytical and numerical solutions of fuzzy differential equations. Inf. Sci. 2013, 236, 156–167. [Google Scholar] [CrossRef]
- Kasasbeh, H.A.L.; Perfilieva, I.; Ahmad, M.Z.; Yahya, Z.R. New Fuzzy Numerical Methods for Solving Cauchy Problems. Appl. Syst. Innov. 2018, 1, 15. [Google Scholar] [CrossRef]
- Kasasbeh, H.A.L.; Perfilieva, I.; Ahmad, M.Z.; Yahya, Z.R. New Approximation Methods Based on Fuzzy Transform for solving SODEs: I. Appl. Syst. Innov. 2018, 1, 29. [Google Scholar] [CrossRef]
- Kasasbeh, H.A.L.; Perfilieva, I.; Ahmad, M.Z.; Yahya, Z.R. New Approximation Methods Based on Fuzzy Transform for solving SODEs: II. Appl. Syst. Innov. 2018, 1, 30. [Google Scholar] [CrossRef]
- Khastan, A.; Perfilieva, I.; Alijani, Z. A new fuzzy approximation method to Cauchy problems by fuzzy transform. Fuzzy Sets Syst. 2016, 288, 75–95. [Google Scholar] [CrossRef]
- Radi, D.; Stefanini, L. Fuzzy Differential Equations by F-Transform. In Proceedings of the NAFIPS 2015 Annual Meeting, Redmond, WA, USA, 17–19 August 2015; pp. 384–389. [Google Scholar]
- Bede, B.; Stefanini, L. Generalized differentiability of fuzzy-valued functions. Fuzzy Sets Syst. 2013, 230, 119–141. [Google Scholar] [CrossRef]
- Stefanini, L.; Bede, B. Generalized Hukuhara differentiability of interval-valued functions and interval differential equations. Nonlinear Anal. 2009, 71, 1311–1328. [Google Scholar] [CrossRef]
- Stefanini, L.; Bede, B. Generalized fuzzy differentiability with LU-parametric representation. Fuzzy Sets Syst. 2014, 257, 184–203. [Google Scholar] [CrossRef][Green Version]
- Bede, B. Mathematics of Fuzzy Sets and Fuzzy Logic; Springer: Berlin, Germany, 2013. [Google Scholar]
- Gomes, L.T.; de Barros, L.C.; Bede, B. Fuzzy Differential Equations in Various Approaches; Springer: Berlin, Germany, 2015. [Google Scholar]
- Stefanini, L. A generalization of Hukuhara difference and division for interval and fuzzy arithmetic. Fuzzy Sets Syst. 2010, 161, 1564–1584. [Google Scholar] [CrossRef]
- Forsythe, G.E.; Malcolm, M.A.; Moler, C.B. Computer Methods for Mathematical Computations; Prentice-Hall: Englewood Cliffs, NJ, USA, 1977. [Google Scholar]
- Stefanini, L.; Arana-Jimenez, M. Karush-Kuhn-Tucker conditions for interval and fuzzy optimization in several variables under total and directional generalized differentiability. Fuzzy Sets Syst. 2019, 362, 1–34. [Google Scholar] [CrossRef]
- Stefanini, L.; Guerra, M.L.; Amicizia, B. Interval Analysis and Calculus for Interval-Valued Functions of a Single Variable. Part I: Partial Orders, gH-derivative, Momotonicity. Axioms 2019, 8, 113. [Google Scholar] [CrossRef]
- Stefanini, L.; Sorini, L.; Amicizia, B. Interval Analysis and Calculus for Interval-Valued Functions of a Single Variable. Part II: Extremal Points, Convexity, Periodicity. Axioms 2019, 8, 114. [Google Scholar] [CrossRef]
- Tomasiello, S. An alternative use of fuzzy transform with application to a class of delay differential equations. Int. J. Comput. Math. 2017, 94, 1719–1726. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, G.T. Functional and Impulsive Differential Equations of Fractional Order—Qualitative Analysis and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Ascher, U.M.; Petzold, L.R. Computer Methods for Ordinary Differential Equations and Differential-Algebraic Equations; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Kunkel, P.; Mehrmann, V. Differential-Algebraic Equations—Analysis and Numerical Solution; European Mathematical Society: Zürich, Switzerland, 2006. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| = 0.00 | Initial value = [1.0, 3.0] |
|---|---|
| tw = 0.25 | X(tw) = [1.2026308981, 3.5476701109] |
| tw = 0.50 | X(tw) = [1.0961169068, 3.0961169068] |
| tw = 0.75 | X(tw) = [1.4006060055, 3.7456452183] |
| tw = 1.00 | X(tw) = [1.3078549504, 3.3078549504] |
| tw = 1.25 | X(tw) = [1.6663651377, 4.0114043505] |
| tw = 1.50 | X(tw) = [1.5195929939, 3.5195929939] |
| tw = 1.75 | X(tw) = [1.8643402451, 4.2093794579] |
| Final value = [1.61570990, 3.61570990] | |
| = 0.50 | Initial value: [1.25, 2.50] |
| tw = 0.25 | X(tw) = [1.4957607997, 2.9614103077] |
| tw = 0.50 | X(tw) = [1.3461169068, 2.5961169068] |
| tw = 0.75 | X(tw) = [1.6937359071, 3.1593854151] |
| tw = 1.00 | X(tw) = [1.5578549504, 2.8078549504] |
| tw = 1.25 | X(tw) = [1.9594950393, 3.4251445473] |
| tw = 1.50 | X(tw) = [1.7695929939, 3.0195929939] |
| tw = 1.75 | X(tw) = [2.1574701467, 3.6231196547] |
| Final value = [1.86570990, 3.11570990] | |
| = 1.00 | Initial value: [1.50, 2.00] |
| tw = 0.25 | X(tw) = [1.7888907013, 2.3751505045] |
| tw = 0.50 | X(tw) = [1.5961169068, 2.0961169068] |
| tw = 0.75 | X(tw) = [1.9868658087, 2.5731256119] |
| tw = 1.00 | X(tw) = [1.8078549504, 2.3078549504] |
| tw = 1.25 | X(tw) = [2.2526249409, 2.8388847441] |
| tw = 1.50 | X(tw) = [2.0195929939, 2.5195929939] |
| tw = 1.75 | X(tw) = [2.4506000483, 3.0368598515] |
| Final value: [2.11570990, 2.61570990] |
| = 0.00 | Initial value = [1.0, 3.0] |
|---|---|
| tw = 0.25 | X(tw) = [1.5222863012, 3.2280147078] |
| tw = 0.50 | X(tw) = [1.0961169068, 3.0961169068] |
| tw = 0.75 | X(tw) = [1.7202614085, 3.4259898152] |
| tw = 1.00 | X(tw) = [1.3078549504, 3.3078549504] |
| tw = 1.25 | X(tw) = [1.9860205408, 3.6917489475] |
| tw = 1.50 | X(tw) = [1.5195929939, 3.5195929939] |
| tw = 1.75 | X(tw) = [2.1839956481, 3.8897240548] |
| Final value: [1.61570990, 3.61570990] | |
| = 0.50 | Initial value: [1.25, 2.50] |
| tw = 0.25 | X(tw) = [1.6955454266, 2.7616256808] |
| tw = 0.50 | X(tw) = [1.3461169068, 2.5961169068] |
| tw = 0.75 | X(tw) = [1.8935205340, 2.9596007882] |
| tw = 1.00 | X(tw) = [1.5578549504, 2.8078549504] |
| tw = 1.25 | X(tw) = [2.1592796662, 3.2253599204] |
| tw = 1.50 | X(tw) = [1.7695929939, 3.0195929939] |
| tw = 1.75 | X(tw) = [2.3572547736, 3.4233350278] |
| Final value: [1.86570990, 3.11570990] | |
| = 1.00 | Initial value: [1.50, 2.00] |
| tw = 0.25 | X(tw) = [1.8688045521, 2.2952366537] |
| tw = 0.50 | X(tw) = [1.5961169068, 2.0961169068] |
| tw = 0.75 | X(tw) = [2.0667796594, 2.4932117611] |
| tw = 1.00 | X(tw) = [1.8078549504, 2.3078549504] |
| tw = 1.25 | X(tw) = [2.3325387917, 2.7589708934] |
| tw = 1.50 | X(tw) = [2.0195929939, 2.5195929939] |
| tw = 1.75 | X(tw) = [2.5305138991, 2.9569460007] |
| Final value: [2.11570990, 2.61570990] |
| = 0.00 | Initial value = [−1.0, 1.0] |
|---|---|
| tw = 1.7954 | X(tw) = [−1.0090673275, 1.0090673275] |
| tw = 2.5918 | X(tw) = [−5.0989773431, 5.0989773431] |
| tw = 4.3297 | X(tw) = [−8.9894395242, 8.9894395242] |
| Final value: [−8.35571783, 8.35571783] | |
| = 0.20 | Initial value: [−8.00, 8.00] |
| tw = 2.7944 | X(tw) = [−8.1796697089, 8.1796697089] |
| tw = 2.5810 | X(tw) = [−4.6779933026, 4.6779933026] |
| tw = 4.3542 | X(tw) = [−7.9775755945, 7.9775755945] |
| Final value: [−7.52396593, 7.52396593] | |
| = 0.40 | Initial value: [−6.00, 6.00] |
| tw = 3.7935 | X(tw) = [−6.2502008124, 6.2502008124] |
| tw = 2.5579 | X(tw) = [−4.0293011585, 4.0293011585] |
| tw = 4.3844 | X(tw) = [−6.7059314969, 6.7059314969] |
| Final value: [−6.41450486, 6.41450486] | |
| = 0.60 | Initial value: [−4.00, 4.00] |
| tw = 4.8538 | X(tw) = [−4.2690473012, 4.2690473012] |
| tw = 2.5174 | X(tw) = [−3.0871431900, 3.0871431900] |
| tw = 4.4226 | X(tw) = [−5.0673707018, 5.0673707018] |
| Final value: [−4.91260393, 4.91260393] | |
| = 0.80 | Initial value: [−2.00, 2.00] |
| tw = 6.0271 | X(tw) = [−2.2003436269, 2.2003436269] |
| tw = 2.4500 | X(tw) = [−1.7731361249, 1.7731361249] |
| tw = 4.4716 | X(tw) = [−2.9073091262, 2.9073091262] |
| Final value: [−2.85325600, 2.85325600] | |
| = 1.00 | Initial value: [ 0.00, 0.00] |
| Final value: [0.00000000, 0.00000000] |
| = 0.00 | Initial value = [−1.0, 1.0] |
|---|---|
| tw = 1.9321 | X(tw) = [−9.8998479170, 9.8998479170] |
| Final value: [−3.50656260, 3.50656260] | |
| = 0.20 | Initial value: [−8.00, 8.00] |
| tw = 3.0866 | X(tw) = [−7.7947575655, 7.7947575655] |
| Final value: [−1.87166877, 1.87166877] | |
| = 0.40 | Initial value: [−6.00, 6.00] |
| tw = 4.2600 | X(tw) = [−5.7091483288, 5.7091483288] |
| tw = 3.0348 | X(tw) = [−9.5345951680, 9.5345951680] |
| tw = 4.2887 | X(tw) = [−8.4078653821, 8.4078653821] |
| Final value: [−8.90550965, 8.90550965] | |
| = 0.60 | Initial value: [−4.00, 4.00] |
| tw = 5.4899 | X(tw) = [−3.6865624377, 3.6865624377] |
| tw = 2.7506 | X(tw) = [−5.2242232939, 5.2242232939] |
| tw = 4.5230 | X(tw) = [−3.3741623443, 3.3741623443] |
| Final value: [−3.44451472, 3.44451472] | |
| = 0.80 | Initial value: [−2.00, 2.00] |
| tw = 6.8094 | X(tw) = [−1.7696972113, 1.7696972113] |
| tw = 2.5277 | X(tw) = [−2.1957335579, 2.1957335579] |
| tw = 4.6445 | X(tw) = [−8.1718701678e−02, 8.1718701678e−02] |
| Final value: [−8.21485320e−02, 8.21485320e−02] | |
| = 1.00 | Initial value: [0.00, 0.00] |
| Final value: [0.00000000, 0.00000000] |
| Initial Condition | Final solution (Meth = 1) | Final solution (Meth = 2) | |
|---|---|---|---|
| 0.0 | [−1.0000, 1.0000] | [−7.9066, 6.8715] | [−6.5292, −3.8225] |
| 0.1 | [−9.0000, 9.0000] | [−7.1677, 6.1326] | [−6.3939, −3.9579] |
| 0.2 | [−8.0000, 8.0000] | [−6.4288, 5.3937] | [−6.2586, −4.0932] |
| 0.3 | [−7.0000, 7.0000] | [−5.6899, 4.6548] | [−6.1232, −4.2285] |
| 0.4 | [−6.0000, 6.0000] | [−4.9510, 3.9158] | [−5.9879, −4.3639] |
| 0.5 | [−5.0000, 5.0000] | [−4.2121, 3.1769] | [−5.8526, −4.4992] |
| 0.6 | [−4.0000, 4.0000] | [−3.4732, 2.4380] | [−5.7172, −4.6345] |
| 0.7 | [−3.0000, 3.0000] | [−2.7343, 1.6991] | [−5.5819, −4.7699] |
| 0.8 | [−2.0000, 2.0000] | [−1.9954, 9.6022] | [−5.4465, −4.9052] |
| 0.9 | [−1.0000, 1.0000] | [−1.2565, 2.2132] | [−5.3112, −5.0405] |
| 1.0 | [0.0000, 0.0000] | [−5.1759, −5.1759] | [−5.1759, −5.1759] |
| Example/(Algorithm, Step Size) | ||
|---|---|---|
| Ex4/(Scheme II in [14], h = 0.01) | ||
| Ex4/(ODE-FT, h = 0.01) | ||
| Ex5/(Scheme II in [14], h = 0.1) | ||
| Ex5/(ODE-FT, h = 0.1) | ||
| Ex5/(ODE-FT, h = 0.01) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radi, D.; Sorini, L.; Stefanini, L. On the Numerical Solution of Ordinary, Interval and Fuzzy Differential Equations by Use of F-Transform. Axioms 2020, 9, 15. https://doi.org/10.3390/axioms9010015
Radi D, Sorini L, Stefanini L. On the Numerical Solution of Ordinary, Interval and Fuzzy Differential Equations by Use of F-Transform. Axioms. 2020; 9(1):15. https://doi.org/10.3390/axioms9010015
Chicago/Turabian StyleRadi, Davide, Laerte Sorini, and Luciano Stefanini. 2020. "On the Numerical Solution of Ordinary, Interval and Fuzzy Differential Equations by Use of F-Transform" Axioms 9, no. 1: 15. https://doi.org/10.3390/axioms9010015
APA StyleRadi, D., Sorini, L., & Stefanini, L. (2020). On the Numerical Solution of Ordinary, Interval and Fuzzy Differential Equations by Use of F-Transform. Axioms, 9(1), 15. https://doi.org/10.3390/axioms9010015