1. Introduction
The bibliography of publications devoted to singularly perturbed problems is very extensive. Most of them deal with problems in which a degenerate equation, following from the original one where a small parameter is equal to zero, is resolvable with respect to a fast component of an unknown variable. If it is not so, then this more complicated case is known as critical [
1], singular [
2], nonstandard [
3], or as a case where the unperturbed (degenerate) system is situated on the spectrum [
4]. Numerous applications of singularly perturbed systems in the critical cases have been listed in [
5].
Vasil’eva and Butuzov were the first to study initial value problems for singularly perturbed differential and difference systems in the critical case. Asymptotic solutions of boundary value problems for such systems have been obtained in [
1,
2,
6]. Numerical methods for singularly perturbed systems in the critical case have been researched in [
7] for initial value problems, and in [
8] for boundary value problems.
An asymptotic solution containing boundary functions for the initial value problem of the weakly non-linear differential equation in a real
m-dimensional space
X:
where
and the matrix
is singular, has been constructed in [
4]. A discrete analogue of problem (
1)-(
2) was also considered. The results from this paper are also presented in [
1,
9]. In these publications, the purpose of studying equations of the last form is also explained. Here and further
means a small parameter, and the
matrix
and the
m-dimensional vector-function
are sufficiently smooth with respect to their arguments.
In contrast [
4], the projector approach will be used in this paper for constructing an asymptotic solution of problem (
1)-(
2). It allows us to represent the algorithm of the boundary functions method for constructing an asymptotic solution of initial-value singularly perturbed problems in the critical case more clearly than in [
4].
Note that the projector approach has been used in [
10] for constructing the zero-order asymptotic solution for a singularly perturbed linear-quadratic control problem in the critical case.
We will assume the same assumptions as in [
4] that the matrix
has for each
m eigenvalues
, and that they satisfy the conditions:
Assumption 1. for , .
Assumption 2. All k eigenvectors of the matrix , corresponding to , , are linearly independent.
Following [
4], we will here use eigenvectors having the same smoothness as the matrix
. The existence of such eigenvectors has been proved in [
11].
Furthermore, some assumptions will be yet added.
The transposition will be denoted by the prime. By I, as usual, we mean the identity operator. For the expansion of a function into the series with respect to integer non-negative powers of , we introduce the notation .
The paper is organized as follows. In
Section 2, we present the standard decomposition of the original system (
1) into systems with respect to functions from the asymptotic solution, depending on
t, and with respect to so-called boundary functions, depending on the argument
. In the next section, we introduce orthogonal projectors of the space
X onto
and
. Based on these projectors, the algorithm of constructing the zero-order asymptotic approximation of a solution of problem (
1)-(
2) is given in
Section 4, and the algorithm of constructing the n-th order asymptotic approximation,
, is developed in
Section 5.
Table 1 and
Table 2 in these two sections show the sequence of actions for finding asymptotics terms. In the sixth section, we present an example illustrating the projector approach for constructing the first-order asymptotic approximation. The last section presents our conclusions.
2. Problem Decomposition
In view of [
4], we will seek the asymptotic solution of problem (
1)-(
2) in the form:
where
,
,
. Functions
will be found as in [
4] with the help of the additional condition
Following tradition (see, for instance, [
1], p. 8), a series
with terms depending on the original argument
t is called regular series, in contrast with boundary series
consisting of so-called boundary functions depending on the argument
, which are essential only for arguments in some vicinities of points where additional conditions are prescribed (in a vicinity of zero in the considered case).
As usual in the theory of singular perturbations, the following representation will be used
where
and
Substituting expansion (
3) into (
1) and equating terms of the same order of
separately depending on
t and
, we obtain the following equations for the terms of series (
3):
where
,
In order to write equations (
5) and (
6) in the same forms for the cases
and
, we suppose that terms of expansions with negative indices are equal to zero.
Substituting expansion (
3) into (
2) and equating terms of the same order of
, we obtain the equalities:
3. Space Decomposition
Further, we will use the decompositions of the space
X in the orthogonal sums (see, for instance, [
12], p. 38)
Orthogonal projectors
and
of the space X onto the subspaces
and
, respectively, corresponding to the decompositions of the space
X into two last orthogonal sums, will be applied. We can write the explicit form of these projectors. Namely, let
and
, where
are the eigenvectors of the matrix
corresponding to eigenvalues
,
. Following [
9], we believe that the eigenvectors
have been chosen in such a way that
is the
identity matrix. We explain that this is possible. The invertibility of the matrix
is proved in [
1]. If
, then we take the columns of the matrix
as
.
It easily follows from Assumption 2 that the matrices and are invertible. It is not difficult to see that and are orthogonal projectors of the space X onto the subspaces and , respectively, corresponding to the decompositions of the space X into the orthogonal sums.
The operator
has the inverse operator. It will be denoted as
.
The following condition is assumed.
Assumption 3. For each the operator is stable—that is, all eigenvalues of this operator have negative real parts.
It is not difficult to prove that the operator is invertible. Let us take a vector x from . Then, , where and , are some scalar functions. Consider the equation . It follows from this that . Since is a identity matrix, then , which gives the provable invertibility.
4. Zero-Order Asymptotic Solution
From (
5), we have the equation for
:
Using (
9), we find from (
7) the initial value
From (
6), we have the equation for
This equation is equivalent to two ones:
In view of Assumption 3, we obtain a unique solution of initial problem (
10)-(
11) satisfying the inequality
with some positive constants
c and
independent of
(see, for instance, [
13], p. 106). In this estimate, any norm may be used, since all norms in a finite dimensional space are equivalent. Functions satisfying the last inequality are called exponential-type boundary functions.
From (
12), we get the equality
. Since
as
, then
. Using the exponential estimate for
, we uniquely define the exponential-type boundary function
, namely,
Hence, the exponential-type boundary function
has been found. Then, we can get the initial value from (
7):
In view of (
5), the equation for
has the form
Taking into account (
9), we can write the solvability condition for the last equation in the form
Since
we obtain the equation
If operator
is constant, then projectors
and
are constant too, and the last equation has the form
We will yet assume the condition.
Assumption 4. Problem (14)–(16) has a unique solution on the segment . A similar assumption regarding the solvability of some initial-value problem for a non-linear equation of the smaller dimension than the original one was presented in [
1] (Assumption IV, p. 13).
Thus, the function
is defined. Hence, the zero-order asymptotics for a solution of problem (
1)-(
2) is found.
The following
Table 1 shows the sequence of finding zero-order asymptotics terms.
5. Higher-Order Asymptotic Solutions
Suppose that the terms
and
of expansion (
3),
, have been found.
From equation (
5) with
, we obtain the relation
where the right-hand side is known. Applying the operator
to this equation, we have
Then, we can find from (
8) with
the initial value
The equation (
6) with
has the form
This equation is equivalent to two ones.
The sum of two last summands in the right-hand side in (
20) is a known exponential-type boundary function. Therefore, in view of Assumption 3, we can find from (
19) and (
20) the exponential-type boundary function
. Note that the proof of exponential estimates for boundary functions is given in detail in monograph [
14].
As the function in the braces on the right-hand side in (
21) is a known exponential type boundary function, we can get from (
21) the exponential-type boundary function
, namely
Hence, the exponential-type boundary function
is defined. Then, we can find from (
8) with
the initial value
Writing out equation (
5) with
, we get
The solvability condition for this equation has the form
In view of (
15), we obtain from here the equation
If operator
is constant, then this equation has the form:
It should be noted that equation (
24) is linear with respect to
. As
has been found (see (
18)), we can define the function
from (
23) and (
24).
Hence, we have found the terms of the
n-th order in expansion (
3).
The following
Table 2 shows the sequence of finding the
n-th order terms in expansion (
3).
The previous arguments have, as a consequence, the following assertion.
Theorem 1. Under Assumptions 1–4, the asymptotic solution of problem (1) and (2) in form (3) can be constructed with the help of orthogonal projectors onto and . The order of finding the asymptotics terms is the following: , , , , . 6. Illustrative Example
Consider the following initial value problem of form (
1)-(
2) on the segment
:
Here,
,
;
,
;
,
We will construct the first-order approximation for the asymptotic solution of problem (
26)-(
27) using projectors
P and
Q.
Relation (
9), in this case, has the form:
Therefore, .
From (
10), we get
.
Equation (
11) has the form:
Taking into account the initial value
found from (
10), we obtain from the last equation
From (
13), we find
From (
14) and (
17) we derive, respectively,
In view of the last two relations, we have .
It is easy to verify that conditions 1–4 are satisfied for problem (
26)-(
27).
Thus, we have found the zero-order asymptotic solution of form (
3)
for the solution of problems (
26)-(
27). Namely, we have
Now, we will seek for the first-order asymptotics.
Equation (
18) for
has the form:
Therefore, .
From (
19) with
, we get
.
Equation (
20) for
has the form:
From the last two relations, we obtain .
From (
22) with
, we find
From (
23) and (
25) with
, we derive, respectively,
In view of the last two relations, we have
Thus, we have found for problems (
26)-(
27) the first-order asymptotic solution of form (
3)
. Namely, we have
Of course, these results can be obtained using the algorithm from [
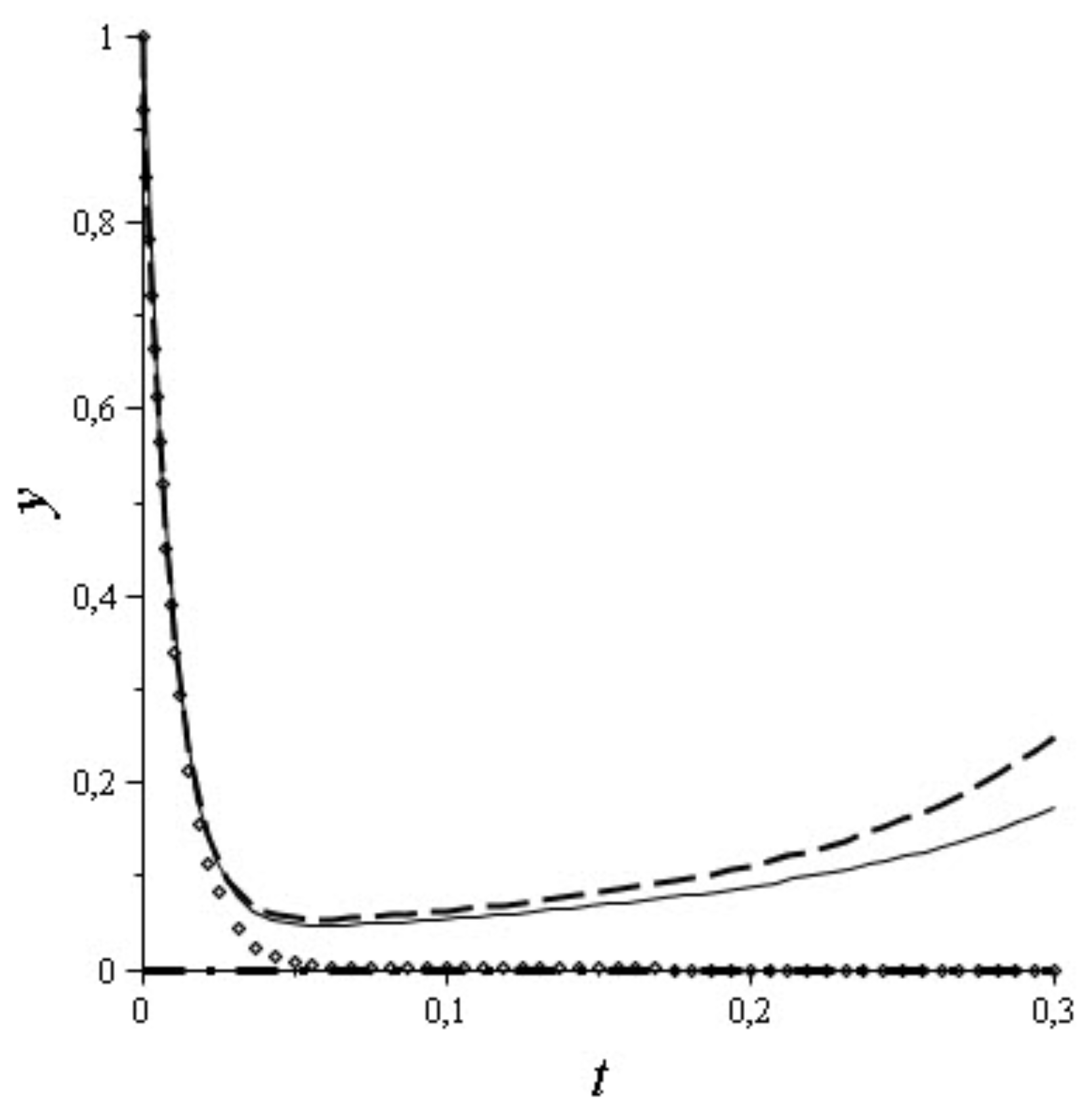
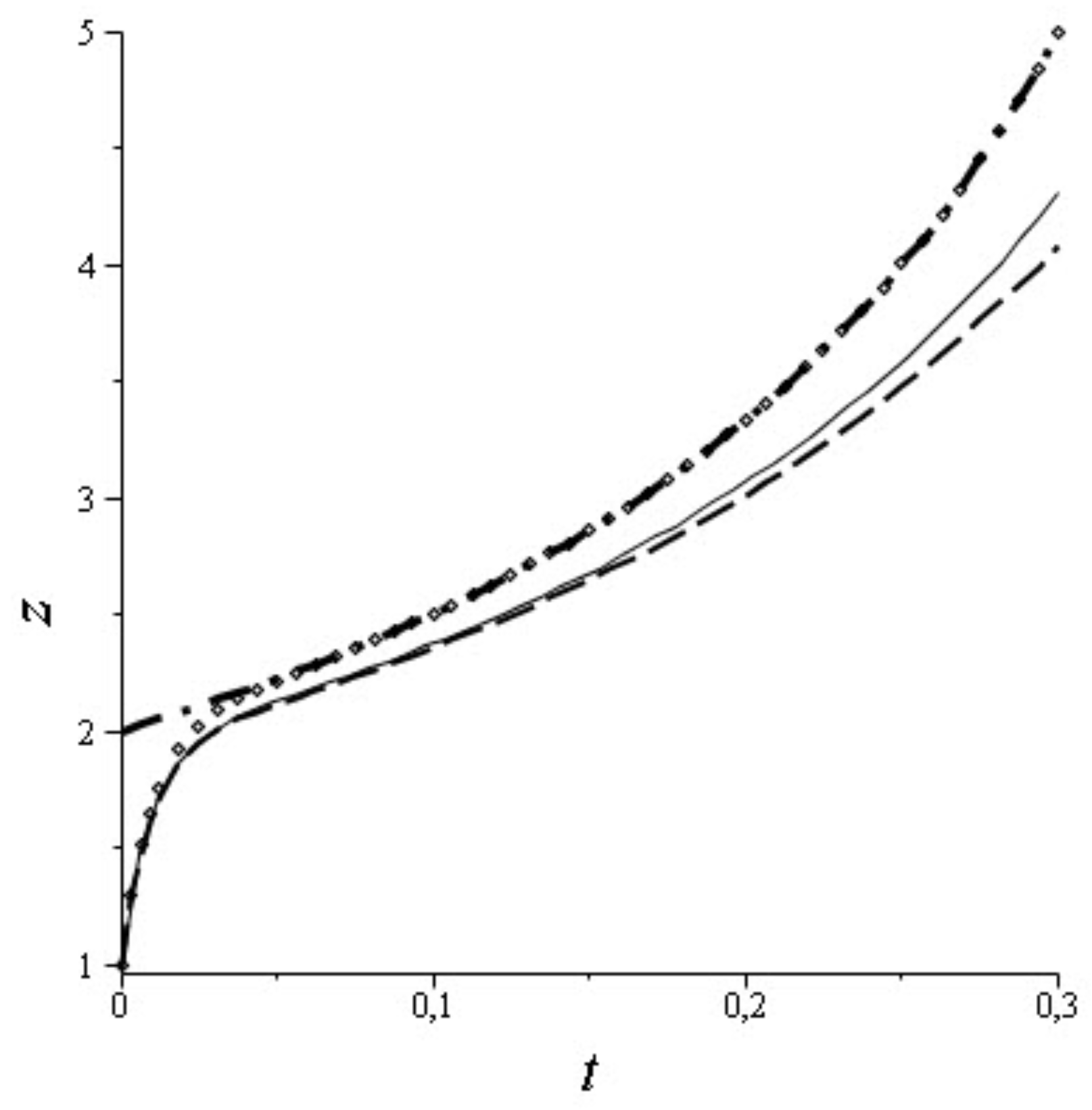
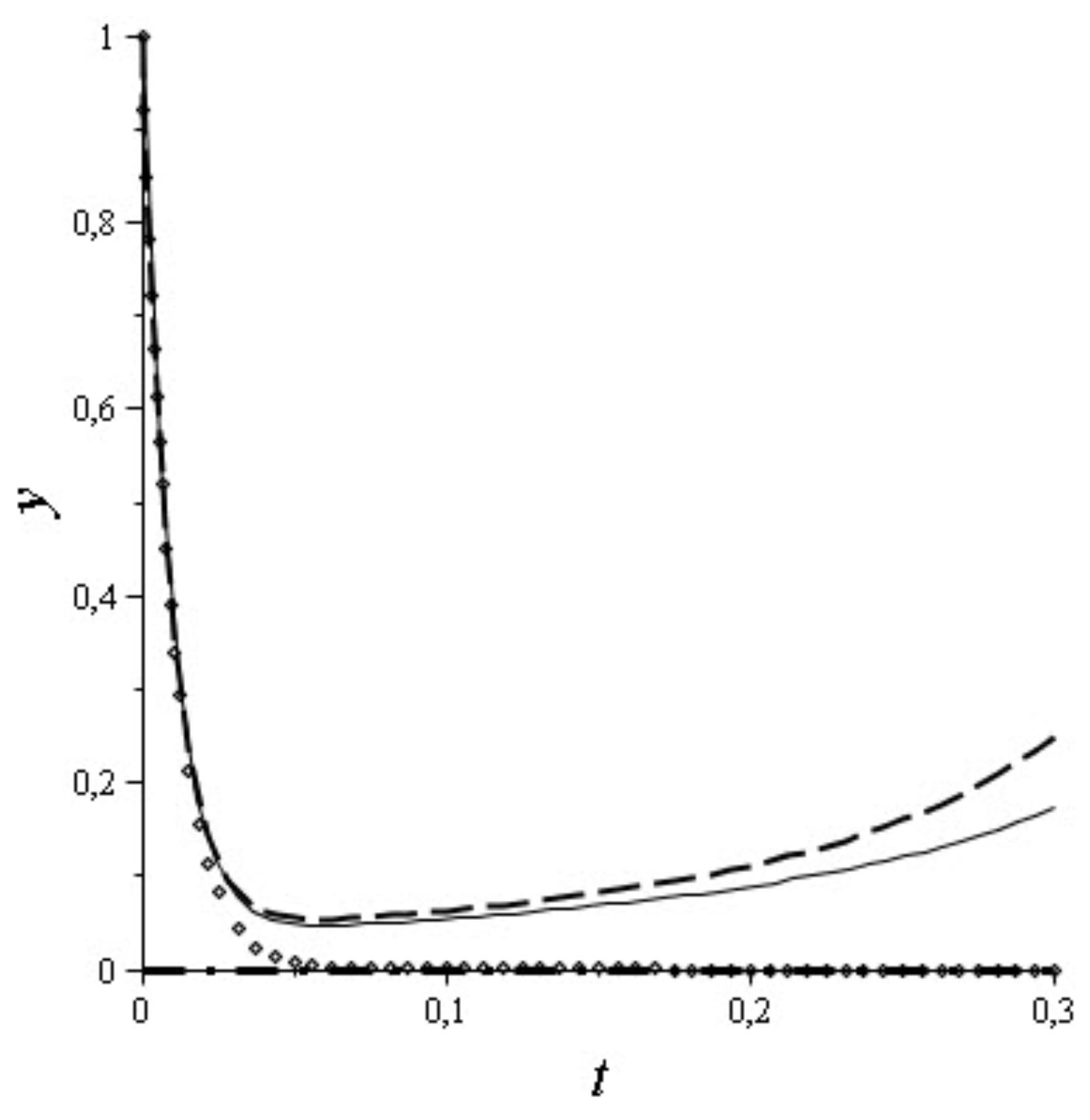
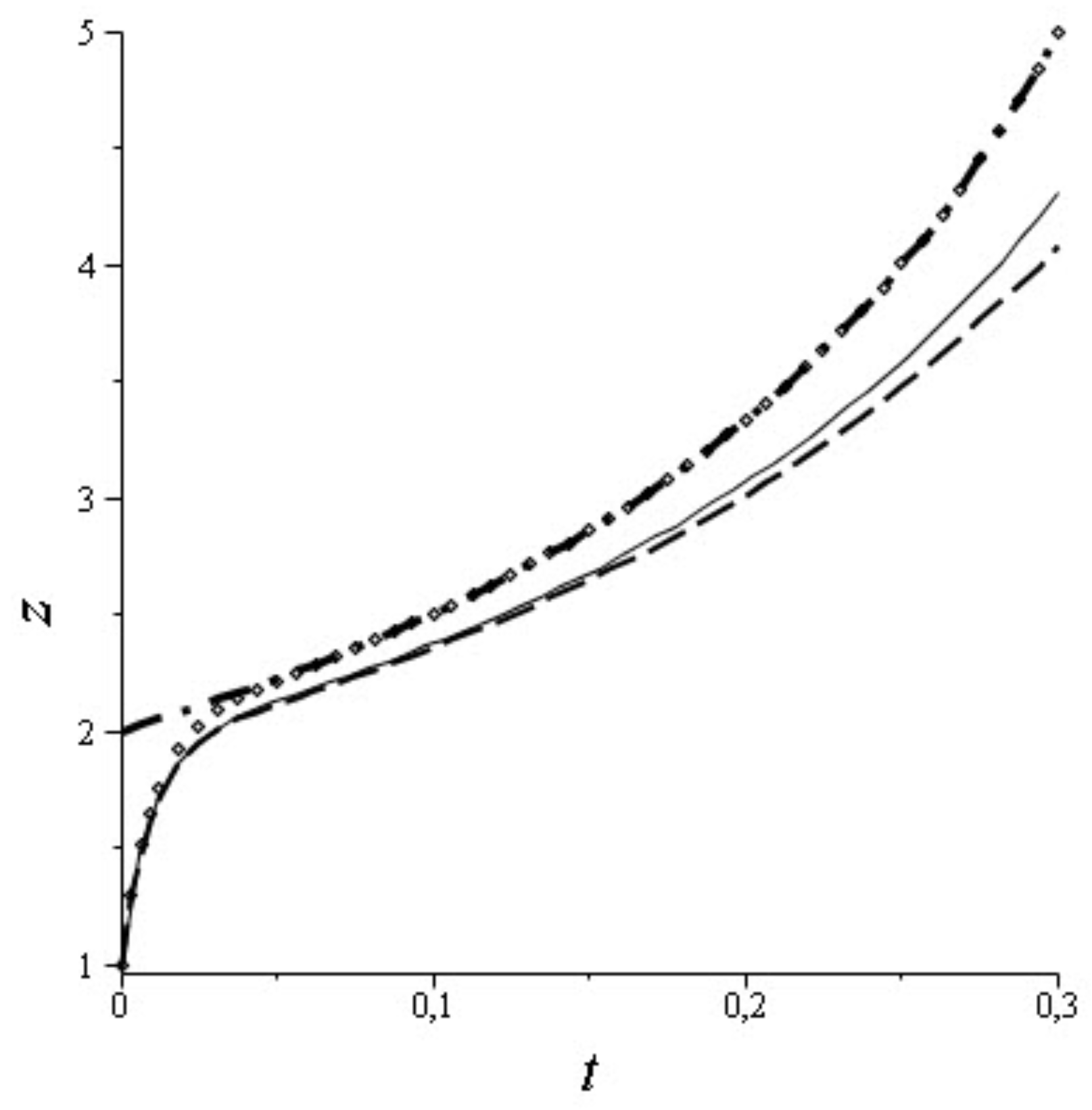
4], but we would like to demonstrate here the use of projectors for finding asymptotics terms. The results obtained by Maple 13 are given in
Figure 1 and
Figure 2. They have been presented for the completeness of the paper. The solid line represents the exact solution; the dash-dotted line—the solution of the degenerate problem, the line consisting of squares represents the zero-order approximation; and the dash line represents the the first-order approximation. These graphs show that an asymptotic solution is closer to the exact one if we use higher-order asymptotics. If we use the smaller value of
, then it will result in an asymptotic solution more similar to the exact one. The graphs of the solution of the degenerate problem and the zero-order approximation illustrate the known property of boundary functions that are essential only for arguments in some vicinities of points where additional conditions are prescribed.



{kind=link}
{kind=link}