


Semi-Analytical Solutions for the Shimizu–Morioka Dynamical System


Abstract
1. Introduction
2. The Main Approach of the OAFM Method
2.1. Main Steps of the OAFM
- (i)
- The exponential function or the rational function in the case of the boundary value problems from fluid mechanics;
- (ii)
- Trigonometric functions , describe the nonlinear vibrations with periodic behaviors;
- (iii)
- , model the nonlinear vibrations with harmonic/anharmonic oscillations—damping effect.
2.2. Semi-Analytical Solutions via OAFM Procedure
3. Numerical Results and Validation
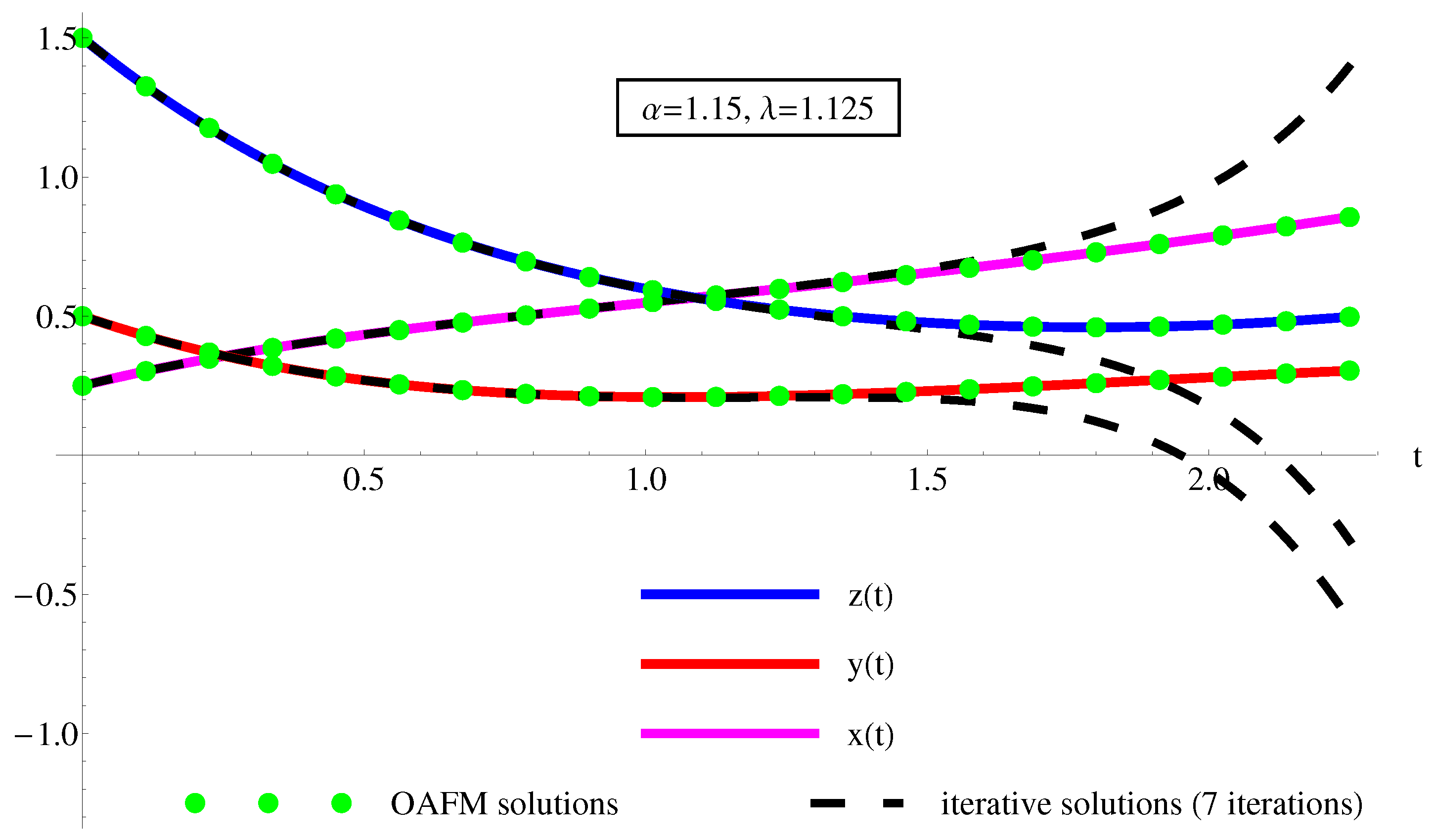
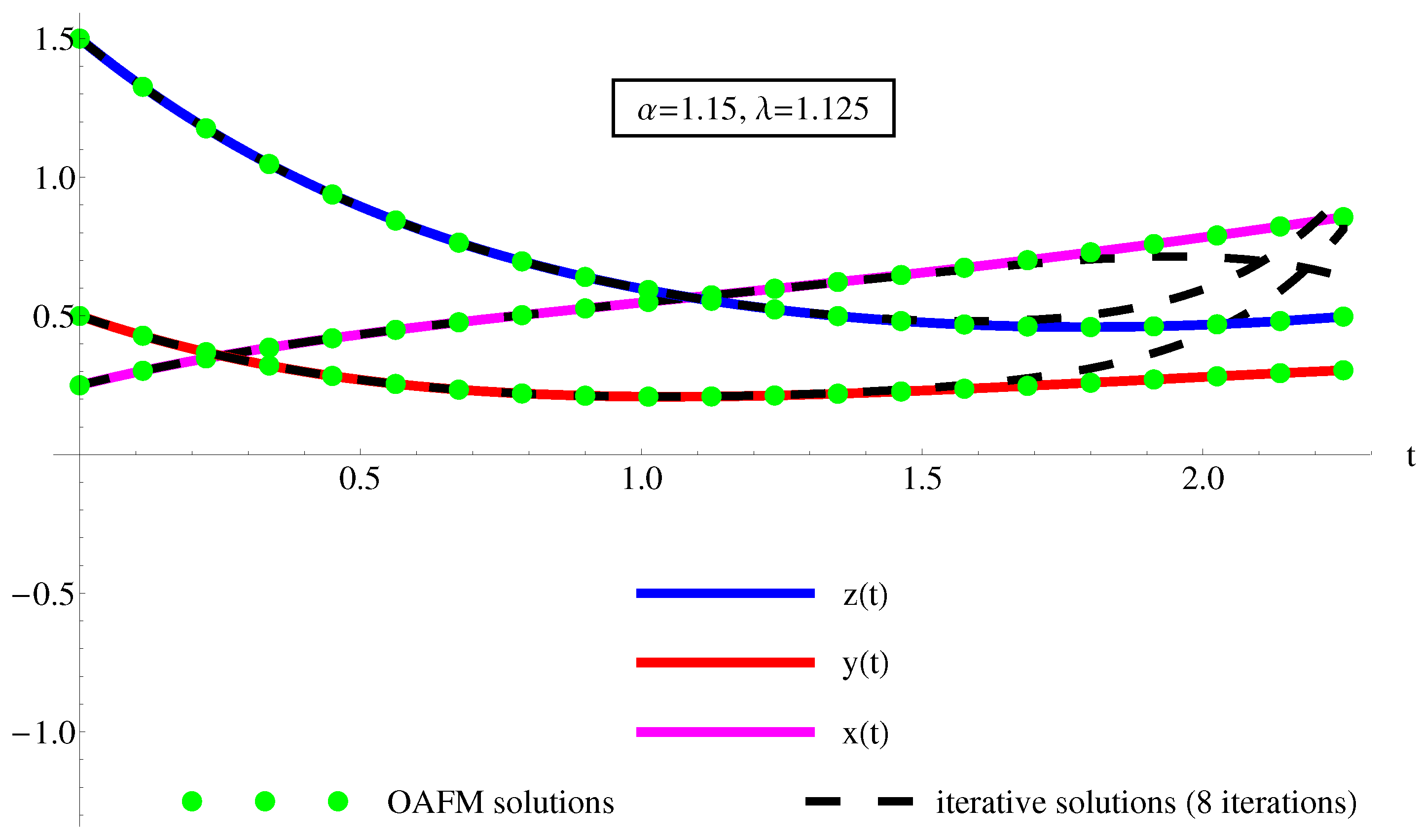
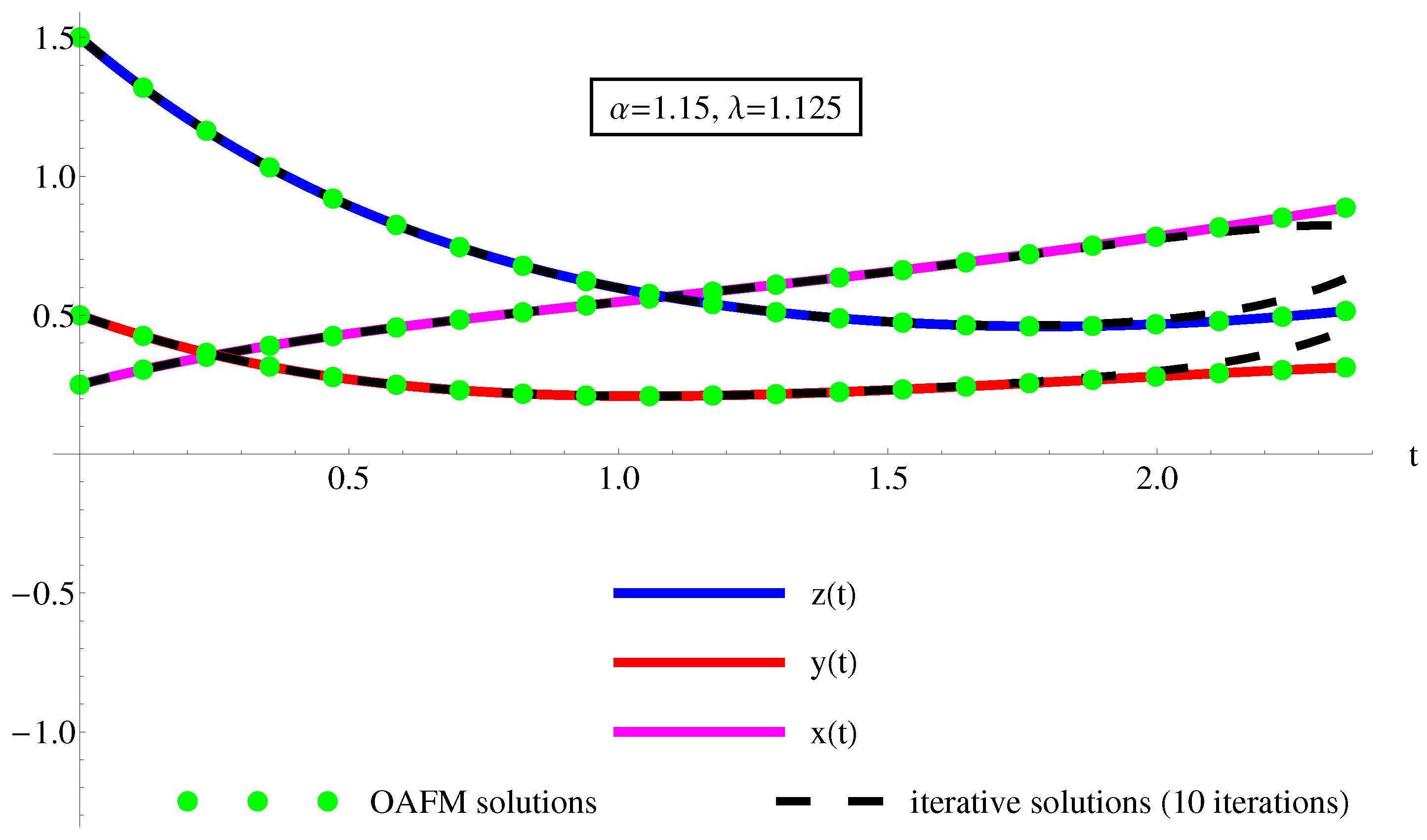
OAFM Technique Versus the Iterative Method
4. Conclusions
- The arbitrary choice of the linear operator L and auxiliary functions allows writing the OAFM solution in effective form;
- The convergence control is ensured by the residual functions being smaller than 1);
- The comparison between the OAFM solutions with the iterative corresponding using 7, 8, 10 iterations highlights the efficiency of the OAFM method by arbitrarily choosing the auxiliary functions and optimally finding the unknown parameters.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Huang, K.; Shi, S.; Li, W. Integrability analysis of the Shimizu-Morioka system. Commun. Nonlinear Sci. Numer. Simulat. 2020, 84, 105101. [Google Scholar] [CrossRef]
- Chen, Z.; Wen, G.; Zhou, H.; Chen, J. A new M × N-grid double-scroll chaotic attractors from Rucklidge chaotic system. Optik 2017, 136, 27–35. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Shimizu, T.; Morioka, N. On the bifurcation of a symmetric limit cycle to an asymmetric one in a simple model. Phys. Lett. A 1980, 76, 201–204. [Google Scholar] [CrossRef]
- Rucklidge, A.M. Chaos in models of double convection. J. Fluid Mech. 1992, 237, 209–229. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, X. Chaos in the Shimizu-Morioka Model with Fractional Order. Front. Phys. 2021, 9, 636173. [Google Scholar] [CrossRef]
- Pyragas, V.; Pyragas, K. Modification of delayed feedback control using ergodicity of chaotic systems. Lith. J. Physics 2010, 50, 305–316. [Google Scholar] [CrossRef]
- El-Dessoky, M.M.; Yassen, M.T.; Aly, E.S. Bifurcation analysis and chaos control in Shimizu-Morioka chaotic system with delayed feedback. Appl. Math. Comput. 2014, 243, 283–297. [Google Scholar] [CrossRef]
- Hajiloo, R.; Salarieh, H.; Alasty, A. Chaos control in delayed phase space constructed by the Takens embedding theory. Commun. Nonlinear Sci. Numer. Simulat. 2018, 54, 453–465. [Google Scholar] [CrossRef]
- Dong, C.; Lian, J.; Qi, J.; Hantao, L. Symbolic Encoding of Periodic Orbits and Chaos in the Rucklidge System. Complexity 2021, 2021, 4465151. [Google Scholar] [CrossRef]
- Zhang, X. Stability and bifurcation analysis for a delayed Shimizu-Morioka model. Miskolc Math. Notes 2019, 20, 585–598. [Google Scholar] [CrossRef]
- Llibre, J.; Pessoa, C. The Hopf bifurcation in the Shimizu-Morioka system. Nonlinear Dyn. 2015, 79, 2197–2205. [Google Scholar] [CrossRef]
- Lazureanu, C.; Cho, J. On the dynamics of a deformed version of the Shimizu-Morioka system. Sci. Bull. Politeh. Timis. Trans. Math. Phys. 2021, 66, 3–28. [Google Scholar]
- Tarammim, A.; Akter, M.T. Shimizu-Morioka’s chaos synchronization: An efficacy analysis of active control and backstepping methods. Front. Appl. Math. Stat. 2023, 9, 1100147. [Google Scholar] [CrossRef]
- Marinca, V.; Herisanu, N. Approximate analytical solutions to Jerk equation. In Springer Proceedings in Mathematics & Statistics: Proceedings of the Dynamical Systems: Theoretical and Experimental Analysis, Lodz, Poland, 7–10 December 2015; Springer: Cham, Switzerland, 2016; Volume 182, pp. 169–176. [Google Scholar]
- Marinca, V.; Ene, R.-D.; Marinca, V.B. Optimal Auxiliary Functions Method for viscous flow due to a stretching surface with partial slip. Open Eng. 2018, 8, 261–274. [Google Scholar] [CrossRef]
- Ene, R.-D.; Pop, N.; Lapadat, M. Approximate Closed-Form Solutions for the Rabinovich System via the Optimal Auxiliary Functions Method. Symmetry 2022, 14, 2185. [Google Scholar] [CrossRef]
- Ene, R.-D.; Pop, N.; Lapadat, M.; Dungan, L. Approximate closed-form solutions for the Maxwell-Bloch equations via the Optimal Homotopy Asymptotic Method. Mathematics 2022, 10, 4118. [Google Scholar] [CrossRef]
- Ene, R.-D.; Pop, N.; Badarau, R. Exact Parametric and Semi-Analytical Solutions for the Rucklidge-Type Dynamical System. Mathematics 2025, 13, 2052. [Google Scholar] [CrossRef]
- Daftardar-Gejji, V.; Jafari, H. An iterative method for solving nonlinear functional equations. J. Math. Anal. Appl. 2006, 316, 753–763. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 0.5 | 0.5 | 0 |
| 2 | 0.2798054972 | 0.2798099320 | 4.4348 |
| 4 | 0.1149145059 | 0.1148579777 | 5.6528 |
| 6 | −0.2833329241 | −0.2833924507 | 5.9526 |
| 8 | 0.1391949948 | 0.1393813800 | 1.8638 |
| 10 | 0.1432228297 | 0.1433740142 | 1.5118 |
| 12 | −0.2193132661 | −0.2193586106 | 4.5344 |
| 14 | 0.0687238481 | 0.0686733964 | 5.0451 |
| 16 | 0.1241424092 | 0.1241284932 | 1.3915 |
| 18 | −0.1528594876 | −0.1528799847 | 2.0497 |
| 20 | 0.0291895029 | 0.0292078729 | 1.8369 |
| 0 | 0.5 | 0.5 | 0 |
| 3 | −0.5200171104 | −0.5200953548 | 7.8244 |
| 6 | 0.1664832550 | 0.1668753368 | 3.9208 |
| 9 | 0.2472903979 | 0.2474639679 | 1.7357 |
| 12 | −0.4432078094 | −0.4437048287 | 4.9701 |
| 15 | 0.2085948648 | 0.2089064295 | 3.1156 |
| 18 | 0.2496047066 | 0.2497105034 | 1.0579 |
| 21 | −0.4192167870 | −0.4197847466 | 5.6795 |
| 24 | −0.0007603444 | −0.0003975419 | 3.6280 |
| 27 | 0.3510613933 | 0.3507398486 | 3.2154 |
| 30 | −0.3250992880 | −0.3249791281 | 1.2015 |
| 0 | 0.5 | 0.5 | 0 |
| 4/5 | 0.0429185094 | 0.0467223530 | 3.8038 |
| 8/5 | −0.4013340316 | −0.3973282594 | 4.0057 |
| 12/5 | −0.3799472063 | −0.3789362578 | 1.0109 |
| 16/5 | 0.1637264035 | 0.1616667927 | 2.0596 |
| 4 | 0.1606689854 | 0.1575031484 | 3.1658 |
| 24/5 | −0.2013334222 | −0.2045056815 | 3.1722 |
| 28/5 | 0.1585526079 | 0.1585413486 | 1.1259 |
| 32/5 | −0.1201173664 | −0.1163113870 | 3.8059 |
| 36/5 | 0.0333261251 | 0.0396604970 | 6.3343 |
| 8 | 0.0734475927 | 0.0787429134 | 5.2953 |
| 7 Iterations | 8 Iterations | 10 Iterations | |||
|---|---|---|---|---|---|
| 0 | 0.25 | 0.2499999999 | 0.25 | 0.25 | 0.25 |
| 0.225 | 0.3468949150 | 0.3469078400 | 0.3468949335 | 0.3468949323 | 0.3505635497 |
| 0.45 | 0.4195412937 | 0.4195648239 | 0.4195417133 | 0.4195412626 | 0.4251520207 |
| 0.675 | 0.4771848531 | 0.4771926679 | 0.4771990261 | 0.4771831860 | 0.4841476700 |
| 0.9 | 0.5270086855 | 0.5270102734 | 0.5271821209 | 0.5269801371 | 0.5354682693 |
| 1.125 | 0.5741929869 | 0.5742109718 | 0.5754025051 | 0.5739364010 | 0.5846888548 |
| 1.35 | 0.6222786054 | 0.6223092588 | 0.6281794274 | 0.6207406723 | 0.6354400560 |
| 1.575 | 0.6735534955 | 0.6735731407 | 0.6961185567 | 0.6665968516 | 0.6895499112 |
| 1.8 | 0.7293586022 | 0.7293559010 | 0.8020100267 | 0.7038008705 | 0.7462081568 |
| 2.025 | 0.7902887499 | 0.7902778444 | 0.9973833252 | 0.7105500416 | 0.7986023305 |
| 2.25 | 0.8562977605 | 0.8562996826 | 1.3995527233 | 0.6398630067 | 0.8248310606 |
| 7 Iterations | 8 Iterations | 10 Iterations | |||
|---|---|---|---|---|---|
| 0 | 1.5 | 1.5000000016 | 1.5 | 1.5 | 1.5 |
| 0.225 | 1.1763758373 | 1.1763763751 | 1.1763757896 | 1.1763757922 | 1.1641341787 |
| 0.45 | 0.9378639572 | 0.9378676478 | 0.9378631485 | 0.9378640152 | 0.9200664690 |
| 0.675 | 0.7643380562 | 0.7643437610 | 0.7643128002 | 0.7643410051 | 0.7452321079 |
| 0.9 | 0.6403948868 | 0.6403998115 | 0.6400984112 | 0.6404433398 | 0.6226403148 |
| 1.125 | 0.5547653149 | 0.5547710983 | 0.5527422169 | 0.5551927272 | 0.5401070051 |
| 1.35 | 0.4994768704 | 0.4994876016 | 0.4897131848 | 0.5020315716 | 0.4893266173 |
| 1.575 | 0.4690685160 | 0.4690836737 | 0.4320260737 | 0.4807569279 | 0.4654776866 |
| 1.8 | 0.4599450190 | 0.4599588459 | 0.3423976013 | 0.5041468859 | 0.4685787862 |
| 2.025 | 0.4698652175 | 0.4698731920 | 0.1453402602 | 0.6159658167 | 0.5098294719 |
| 2.25 | 0.4975217052 | 0.4975261008 | −0.3062329520 | 0.9417127712 | 0.6322843547 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ene, R.-D.; Pop, N.; Badarau, R. Semi-Analytical Solutions for the Shimizu–Morioka Dynamical System. Axioms 2025, 14, 580. https://doi.org/10.3390/axioms14080580
Ene R-D, Pop N, Badarau R. Semi-Analytical Solutions for the Shimizu–Morioka Dynamical System. Axioms. 2025; 14(8):580. https://doi.org/10.3390/axioms14080580
Chicago/Turabian StyleEne, Remus-Daniel, Nicolina Pop, and Rodica Badarau. 2025. "Semi-Analytical Solutions for the Shimizu–Morioka Dynamical System" Axioms 14, no. 8: 580. https://doi.org/10.3390/axioms14080580
APA StyleEne, R.-D., Pop, N., & Badarau, R. (2025). Semi-Analytical Solutions for the Shimizu–Morioka Dynamical System. Axioms, 14(8), 580. https://doi.org/10.3390/axioms14080580