
Clifford Distributions Revisited


Clifford Research Group, Foundations Lab, Department of Electronics and Information Systems, Faculty of Engineering and Architecture, Ghent University (Belgium), B-9000 Gent, Belgium
Axioms 2025, 14(7), 533; https://doi.org/10.3390/axioms14070533
Submission received: 24 April 2025
/
Revised: 10 July 2025
/
Accepted: 11 July 2025
/
Published: 14 July 2025
(This article belongs to the Special Issue Recent Advances in Complex Analysis and Related Topics)
Abstract
In the framework of harmonic and Clifford analysis, specific distributions in Euclidean space of arbitrary dimension, which are of particular importance for theoretical physics, are once more thoroughly studied. Indeed, actions involving spherical coordinates, such as the radial derivative and multiplication and division by the radial distance, only make sense when considering so-called signumdistributions, that is, bounded linear functionals on a space of test functions showing a singularity at the origin. Introducing these signumdistributions, the actions of a whole series of scalar and vectorial differential operators on the distributions under consideration, lead to a number of surprising results, as illustrated by some examples in three-dimensional mathematical physics.

1. Introduction
The central notion in this paper is that of a distribution in Euclidean space . Let be the space of scalar-valued, infinitely differentiable functions , with compact support . This space is called a space of test functions. When equipped with an appropriate topology, its dual-space of continuous linear functionals is the space of standard distributions in . Some basic definitions and properties in distribution theory may be found in Appendix A.
In a series of papers, see [1] and the references therein, several families of distributions in Euclidean space were thoroughly studied in the context of the theory of so-called monogenic functions, and this function theory is also termed Clifford analysis. This function theory is a direct and elegant generalization to higher dimensions of the theory of holomorphic functions in the complex plane and a refinement of harmonic analysis. We refer to Appendix E for the basic definitions in Clifford analysis.
Of particular importance to theoretical physics are the distribution families and , involving powers of the radial distance. They are defined using spherical coordinates through the following: ; therein, is the unit sphere in . In Section 3, we will illustrate the use of the spherical coordinates system in the lower-dimensional cases when and .
Definition 1.
For all and test functions , the distributions and are defined by
and
where the spherical means and are given by
and
where is the area of the unit sphere , and Fp represents the finite part distribution on the one-dimensional r-axis.
For the sake of completeness, we have included appendices with further information on the concept of distribution and the one-dimensional Finite Part distribution (see Appendix A), on distributions and (see Appendix B), and on spherical means (see Appendix C). We have also included an appendix, Appendix D, giving an overview of the properties of the most important distributions in both families.
Despite the fact that the distributions are spherical in nature and that a formula such as seems to be trivial, at the time the abovementioned papers were written, their radial derivative value was not yet studied. Meanwhile, it has become clear that the derivation of a distribution with respect to spherical coordinates is far from trivial. To put it straight, the radial derivative of a distribution cannot be a distribution. In his famous and seminal book [2], Laurent Schwartz writes on page 51: Using coordinate systems other than the Cartesian ones should be done with utmost care [our translation]. As an illustration, consider the delta distribution : It is pointly supported at the origin. It is rotation-invariant: . It is even: , and it is homogeneous of degree , where . Therefore, in an initial, naive, approach, one could think of its radial derivative as being a distribution that remains pointly supported at the origin, rotation-invariant, even, and homogeneous of degree . Temporarily leaving aside the even character, based on the other cited characteristics, the distribution should take the form
It becomes clear that such an approach to the radial derivation of the delta distribution is impossible because all distributions appearing in the sum on the right-hand side are odd and not rotation-invariant, whereas is assumed to be even and rotation-invariant. It could be that is either the zero distribution or is no longer pointly supported at the origin, but both of these possibilities are unacceptable.
In ref. [3], the problem of defining the radial derivative of the delta distribution was solved by introducing a new concept, similar to but fundamentally different from a distribution, which was termed a signumdistribution. A signumdistribution is a continuous linear functional acting on a space of test functions that are smooth in and show a non-removable singularity at the origin. The definition and first properties of the signumdistributions are discussed in Section 2. It turns out that the radial derivative of the delta distribution is indeed a signumdistribution. Since the delta function is a fundamental mathematical modeling tool in a broad spectrum of theoretical physics and engineering sciences, we meanwhile undertook the enterprise of compiling a compendium [4] of interesting ready-to-use identities involving the delta distribution and the delta signumdistribution in higher-dimensional Euclidean space.
Actions on general distributions involving spherical coordinates were thoroughly studied in [5]. For a distribution , its radial derivative is well defined, but not uniquely defined, as an equivalence class of signumdistributions. To make the paper self-contained, the main results about spherical actions on (signum)distributions are recalled in Section 2, Section 3, Section 4 and Section 5. In Section 6, we state the sufficient conditions under which the actions of a number of operators involving division by or r are uniquely determined. In Section 8, we show a.o. that the radial derivative of the distributions and is uniquely defined as a signumdistribution belonging to two families of signumdistributions and which are closely related to the initial distribution families and . In addition, other actions on the distributions and involving spherical coordinates are explored. In Section 7 and Section 9, special attention is paid to the Cartesian derivatives of signumdistributions in general and of the signumdistributions and in particular. In Section 10, we show how the powers of the vector variable fit into the scheme of the and distributions and their normalizations and . Finally, Section 11 is devoted to some applications in theoretical physics showing that signumdistributions indeed arise in this context, albeit they are unnoticed.
2. Signumdistributions
We confine ourselves to a concise introduction of the new concept of a signumdistribution; for a systematic treatment, including the functional analytic background and justification and numerous examples, we refer to [3,5].
In Euclidean space , with orthonormal basis , we interpret the vectors as Clifford 1-vectors in the Clifford algebra . In this Clifford algebra, the basis vectors satisfy the product rules and for and . This allows for the use of the highly efficient, non-commutative geometric or Clifford product of Clifford 1-vectors:
where the scalar dot product is commutative, and the bivector product is anti-commutative. Note, in particular, that
with being the Clifford 1-vector , whence also, passing to the spherical coordinates, we have
For more on the Clifford product, we refer to Appendix E.
We consider two spaces of test functions: the traditional space of compactly supported infinitely differentiable functions and the space . Clearly, the test functions in are no longer differentiable in the whole of , because they are not defined at the origin due to the function , which can be seen as the higher-dimensional counterpart of the one-dimensional signum function . Obviously, there is a one-to-one correspondence between the spaces and . The continuous linear functionals on these spaces of test functions, both equipped with an appropriate topology, are the standard distributions and the signumdistributions, respectively. For some basic definitions in distribution theory, we refer to Appendix A.
Given a standard distribution , the signumdistribution is defined such that, for all test functions , the following holds:
Then, is called the signumdistribution associated with . Given a distribution T, it was shown in [6] that the associated signumdisribution is unique.
Conversely, for a given signumdistribution , we define the associated distribution by
Clearly, it holds that
3. Cartesian Operators
We call an operator acting on distributions Cartesian if it involves partial derivation with respect to the Cartesian coordinates, as well as multiplication and division by analytic functions. Although well defined, this last operation is not uniquely determined but instead results in an equivalence class of distributions involving (derivatives of) the delta distribution , being a zero of the analytic function considered. The two most basic Cartesian operators on distributions are the multiplication operator and Dirac operator . Their actions are well defined and uniquely determined. Indeed, for any distribution T and all test functions , it holds that
This also is the case for their squares, the multiplication operator and the Laplace operator . Indeed, for any distribution T and all test functions , it holds that
The division of a distribution by can be approached in two ways. Firstly, the function may be considered as a vector polynomial of the first degree, whence we derive a vector analytic function with a single zero at the origin. Secondly, as , division by is seen as the composition of two operations: first through division by followed by multiplication by . In [6], the following lemma was proven, showing that both approaches are equivalent.
Lemma 1.
For a scalar distribution T, it holds that
for any distribution such that , with being an arbitrary vector constant.
Henceforth, we use the notation for the equivalent class of distributions S such that .
The two fundamental formulæ in monogenic function theory involving the commutator and the anti-commutator of and are
They give rise to two other well-known Cartesian operators: the scalar Euler operator
and the bivector angular momentum operator
It follows that
or more precisely,
Passing to spherical coordinates , the Dirac operator takes the form
with
As the operator , sometimes called the spherical nabla operator, is acting in the tangent (hyper)plane to the unit sphere , it is orthogonal to . This makes the Euler operator to take the well-known form
while the angular momentum operator takes the form
To illustrate the meaning of the angular differential operator , we consider the traditional cases of low dimension: and . In the 2-dimensional case (), it holds that
and
where
is a unit vector tangent to the unit circle. Note that
with
The angular momentum operator now takes the form
In the 3-dimensional case (), it holds that
and
where
and
are two orthogonal unit vectors which span the tangent plane to the unit sphere. Note that
with
The angular momentum operator now takes the form
The question now is how to define, if possible, the separate actions of the operators and on a distribution. To that end, both operators should first be shown to be Cartesian, which is achieved by putting
leading to the following definition.
Definition 2.
Let be a distribution. Then, we have
and
It becomes clear that, in this way, the actions of and on the distribution are well defined but not uniquely determined, owing to the division by , according to Lemma 1. The resulting equivalent classes are denoted in square brackets. However, if and are distributions arbitrarily chosen in the equivalent classes (3) and (4), respectively, that is,
then
and
and it must hold that
where the distribution on the utmost right-hand side is a known distribution once distribution T is given. We say that the differential operators and are entangled in the sense that the results of their actions on a distribution are subject to (5), which becomes a condition to be satisfied by the arbitrary constants and . Henceforth, we call (5) the entanglement condition for the operators and .
Expressing the Laplace operator in spherical coordinates, we obtain, in view of the formulæ
that
The Laplace–Beltrami operator is, contrary to its appearance, Cartesian, and so is the operator . The following result holds.
Proposition 1
(see [6]). The angular differential operators and may be written in terms of Cartesian derivatives as
and
The actions of the Laplace operator and the Laplace–Beltrami operator on a distribution are uniquely well defined, and the question arises as to how to define the separate actions on a distribution of the three parts of the Laplace operator expressed in spherical coordinates. It turns out that these operators are Cartesian, with their actions on a distribution being well defined, though not uniquely determined, through equivalent classes of distributions.
Proposition 2.
The operators , , and are Cartesian, and, for a distribution T, we have that
leading to
- (i)
- for arbitrary constants and and for any distribution such that , with ;
- (ii)
- for arbitrarily constant and for any distribution such that ;
- (iii)
- for arbitrary constants and and for any distribution such that .
Proof.
(i) The direct computation shows that , whence
Further, we have
with . It follows that
with .
(ii) As , it follows that and also that
with .
(iii) The distribution is uniquely well defined, and is an analytic function with a second-order zero at the origin; thus, the result follows immediately.
□
Remark 1.
The operators , , and are entangled in the sense that, given a distribution T and appropriately choosing the distributions , , , and , all arbitrary constants appearing in the expressions of Proposition 2 should satisfy the entanglement condition generated by
with the distribution at the right-hand side being uniquely determined.
4. Signum Pairs and Cross Pairs of Operators
With each well-defined operator P acting between distributions, there corresponds an operator
acting between signumdistributions, according to the following commutative diagram defined as
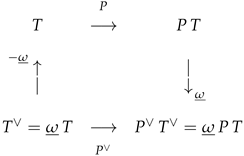
Remark 2.
When the operators P and form a signum pair of operators, it then follows that , and it becomes tempting to consider the operator P as the signum partner to the operator and to define the action of the operator P on signumdistributions through the action of on distributions. However, this is justifiable only if the operator is a ”legal“ operator, such as a Cartesian operator, between distributions.
The above commutative diagram induces two more operators, where operator Q maps a distribution to a signumdistribution, and the corresponding operator maps a signumdistribution to a distribution according to the following commutative diagram:

In Section 3, we saw that the Laplace–Beltrami operator and the square of the angular derivative are Cartesian operators. Their signum partners are straightforwardly computed as
and
Clearly, the operator is also Cartesian. Introducing the notation , the signum pairs of operators , , and follow, inducing the definition of the actions of the operators , and on a signumdistribution.
For the signum partner of the Dirac operator we obtain the following expressions:
giving rise to the signum pairs of operators and , which induce the actions of operators and on a signumdistribution.
Note that while the actions of the operator on distributions and of its signum partner on signumdistributions are uniquely determined, the action results of operator on distributions and of its signum partner on signumdistributions are equivalent classes.
We call operator the signum-Dirac operator. At first sight, it is not clear if is Cartesian. However, this is indeed true, and we have the following result:
Proposition 3.
The operators and are Cartesian operators.
Proof.
In view of Definition 2 it holds that
and also
□
This leads to a signum pair of operators , which induces the action of the Dirac operator on a signumdistribution. However, owing to division by , the latter action results into an equivalence class of signumdistributions.
It is interesting to note that, in the same way as the Dirac operator factorizes the Laplace operator, , the signum-Dirac operator factorizes the signum-Laplace operator, i.e., the signum partner of the Laplace operator:
Introducing the notation , it follows that is a signum pair of operators, with
Clearly, operator is Cartesian. The signum pair of operators follows, inducing the action of Laplace operator on a signumdistribution.
From Section 3, we know that the operators , , and , which are constituents of the Laplace operator , are Cartesian operators. Their signum partners are easily seen as
and the signum pairs of operators , , , and follow, inducing the actions of the operators , , , and on a signumdistribution.
5. Spherical Operators
We say that an operator involving the spherical coordinates is spherical when it is not Cartesian. Clearly, the multiplication operators r and are spherical operators, as are the differential operators and . The concepts of signumdistribution, signum pair of operators, and cross pair of operators allow for the definition of the action of spherical operators on both distributions and signumdistributions.
Definition 3.
The product of a distribution T by the function is the signumdistribution associated with T, and, for all test functions , it holds that
Similarly, the product of the signumdistribution by the function is its associated distribution , and it holds that
Definition 4.
The product of a scalar distribution by the function is the signumdistribution given by the uniquely determined expression
Similarly, the product of the scalar signumdistribution by the function is the distribution given by
Remark 3.
For a general Clifford algebra-valued distribution or signumdistribution, the action of the multiplicative operator is defined through linearity with respect to the scalar components.
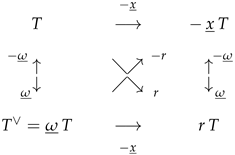
Definition 5.
![Axioms 14 00533 i003]() involving the signum pair of operators , which induces the product of the signumdistribution by to be .
involving the signum pair of operators , which induces the product of the signumdistribution by to be .
The product of a scalar distribution T by the function r is the signumdistribution given for all test functions by
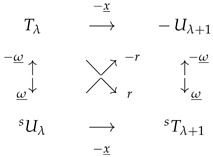
according to the upper triangular part of the commutative diagram
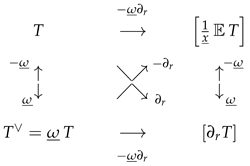
Definition 6.
![Axioms 14 00533 i004]() involving the signum pair of operators , which induces the action of on the signumdistribution to be .
involving the signum pair of operators , which induces the action of on the signumdistribution to be .
The derivative with respect to the radial distance r of a scalar distribution T is the equivalent class of signumdistributions
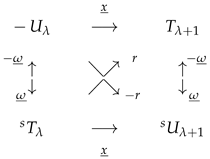
for any vector distribution satisfying , according to the upper triangular part of the commutative diagram
Definition 7.
![Axioms 14 00533 i005]() involving the signumpair of operators or , which induces the action of the operator on the signumdistribution to be .
involving the signumpair of operators or , which induces the action of the operator on the signumdistribution to be .
The angular -derivative of a distribution T is the unique signumdistribution given for all test functions by
according to the upper triangular part of the commutative diagram

Definition 8.
The angular -derivative of a scalar distribution is the unique signumdistribution given by
Remark 4.
- (i)
- An alternative expression for isIndeed, it follows fromthatwhence we have the desired formula states for each of the components.
- (ii)
- For a general Clifford algebra-valued distribution, the action of the spherical derivative operator is defined through linearity with respect to the scalar components.
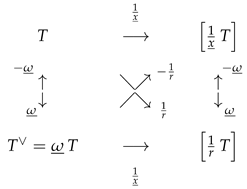
Definition 9.
![Axioms 14 00533 i006]() involving the signum pair of operators , which induces the quotient of the signumdistribution by to be .
involving the signum pair of operators , which induces the quotient of the signumdistribution by to be .
The quotient of a scalar distribution T by the radial distance r is the equivalence class of the signumdistributions
for any vector-valued distribution for which , according to the upper triangular part of the commutative diagram
Remark 5.
![Axioms 14 00533 i007]() In particular, for a scalar distribution , it holds that
In particular, for a scalar distribution , it holds that
Once the action of the spherical derivative operators is defined in Definition 8, we are able to define the action of the corresponding Cartesian operators through the commutative diagram

Example 1.
Because is a radial distribution, we expect , and thus also , to be zero. And indeed it holds that
6. Action Uniqueness of Some Operators
In the preceding sections, we encountered operators acting on distributions and on signumdistributions with a uniquely determined result and those whose actions were not uniquely determined but instead lead to equivalence classes of distributions and signumdistributions, respectively. Nevertheless, in [6], sufficient conditions were found to guarantee the uniqueness of the latter operators’ actions involving homogeneous, radial, and signum-radial distributions and signumdistributions.
Definition 10.
(i) A distribution T or a signumdistribution is said to be radial if it is SO-invariant and depends only on : or , respectively. (ii) A distribution and signumdistribution are said to be signum-radial if their associated signumdistribution and distribution, respectively, are radial.
For the sake of completeness, we recall these sufficient conditions.
- (i)
- If the distribution is radial, then the following actions are uniquely determined asand the actions of the corresponding signum partner operators on the signum-radial signumdistributionare also uniquely determined.
- (ii)
- If the distribution is homogeneous with homogeneity degree , then the following actions are uniquely determined:andAdditionally, the actions of the corresponding signum partner operators on the homogeneous signumdistribution , viz.,andare also uniquely determined.
- (iii)
- If the distribution is homogeneous with homogeneity degree , then the following actions are uniquely determined:and the actions of the corresponding signum partner operators on the homogeneous signumdistributionare uniquely determined as well.
- (iv)
- The conclusions contained in (iii) remain valid if the distribution and signumdistribution under consideration are both radial and signum-radial, respectively, and homogeneous with homogeneity degree .
- (v)
- The conclusions contained in (iii) remain valid if the distribution and signumdistribution under consideration are both signum-radial and radial, respectively, and homogeneous with homogeneity degree .
7. Cartesian Derivatives of Signumdistributions
Recalling the signum pairs of operators and , we expect the Cartesian derivatives of distributions and of signumdistributions to appear in the signum pairs of operators of the form and , . Operators are important in the following sense: When defining a derivative of a distribution, which is merely a sophisticated integration by parts, the differential operator, say , shifts to the test function. It was shown in [6] that when computing the derivative of a signumdistribution, the derivative shifts to the test function, but in the form of the operator .
Definition 11.
For , we define operator as the signum partner of the Cartesian derivative , and it holds that
Clearly, each of the operators is Cartesian. It is the sum of the scalar part and bivector part . This bivector part is a combination of the operator and its components .
As the operator is a well-defined, but not uniquely defined, operator acting on distributions, the signum pairs of operators , hold, enabling the definition of the Cartesian derivative of a signumdistribution as an equivalence class of signumdistributions, as shown in the following commutative diagram:

Remark 6.
A relationship exists between operators , Dirac operator , and operator . A straightforward calculation is as follows:
8. Actions on and
The results of the preceding sections now will be applied to the distributions and . Recalling Definition 1, for , it holds that
and
An alternative, and handy, notation could be and .
For more details, we refer to the series of papers cited at the beginning of Section 1 and also to Appendix B. Now, we briefly comment on Definition 1.
A priori, the distributions and are not defined at the simple poles , , on the r-axis, of the one-dimensional distribution Fp. To cope with these singularities, the distributions Fp, are interpreted as monomial pseudofunctions (see Appendix A).
The distributions are standard scalar distributions that are well known in harmonic analysis. They are radial and homogeneous of degree . As meromorphic functions of , they exhibit genuine simple poles at . This is due to the fact that the singular points , are removable, since the spherical mean has its odd-order derivatives vanishing at . So, we can define
but, remarkably, this limit is precisely , with Fp being the monomial pseudofunction. The most important distribution in this family is , which is, up to a constant, the fundamental solution of the Laplace operator . Also, note the special cases , and .
The distributions are homogeneous of degree . As vector-valued meromorphic functions of , they exhibit genuine simple poles at . This is due to the fact that the singular points , are removable, since the spherical mean has its even-order derivatives vanishing at . So, we can define
but this limit is precisely , with Fp being the monomial pseudofunction. The most important distribution in this family is , which is, up to a constant, the fundamental solution of the Dirac operator . Also, note the special cases , and .
It is important to note that, although the distributions and are also defined in their respective singularities, these exceptional values do not turn these distributions into entire functions of parameter .
When restricted to the half-plane , the distributions and are regular, that is, they are locally integrable functions. From [3,5,6], we know that a locally integrable function can also be seen as a signumdistribution. This inspires the definition of the following two families of the following signumdistributions:
and
It is clear that
and
Thus, inherits the simple poles of , that is, , whereas inherits the simple poles of , that is, .
Because the distributions are radial, according to Definition 10, the signumdistributions are signum-radial. Because the signumdistributions are radial, and by the same definition, the distributions are signum-radial.
In the following subsections, we systematically compute the actions on , , , and of all operators introduced in the preceding sections, paying attention to the uniqueness of the expressions obtained.
8.1. The Operators , r, and
The multiplication operator is a Cartesian operator whose actions are, naturally, uniquely determined. For all , it holds that
Based on the commutative diagram
![Axioms 14 00533 i009]() we find the additional formulæ
and
Similarly, based on the commutative diagram
we find the additional formulæ
and
Similarly, based on the commutative diagram
![Axioms 14 00533 i010]() we obtain the additional formulæ
and also
Iteration of the multiplication operator results in
and
we obtain the additional formulæ
and also
Iteration of the multiplication operator results in
and
The natural powers of are Cartesian operators too. We find that, for all ,
and
Through the appropriate commutative diagrams we find, for all ,
and
8.2. The Operators and
Similar to the multiplication operator , the Dirac operator intertwines the and distribution families. It is clearly a Cartesian operator whose action is uniquely determined. It holds that
and
while for ,
and
with
In particular, for , it holds that
and
Equation (12) expresses the well-known fact that is indeed the fundamental solution of the Dirac operator .
Note also that
Using the signum pair of operators , we obtain the corresponding formulæ for the signumdistributions and as
and
while for ,
and
and, in particular, for ,
and
The iteration of the Dirac operator results in formulæ for the action of the Laplace operator on distributions. It holds that
and
and, in particular, for ,
and also
This last formula expresses the fact that is indeed the fundamental solution of the Laplace operator.
It should be noted that continuing the iteration with the Dirac operator leads to the fundamental solutions of the natural powers of . We find
and
If the dimension m is odd, then the above formulæ are valid for all natural values of ℓ. However, if the dimension m is even, then these expressions are only valid for . This already becomes clear from the fundamental solution of the operator , which is logarithmic in nature: For even dimension m, it holds that
More generally, for all and still for m even, it holds (see [1]) that
The constants and satisfy the recurrence relations
and
with initial values
Through the signum pair of operators or, equivalently, by iteration of the action of operator , we obtain the corresponding formulæ for operator acting between the signumdistributions as follows:
and
and, in particular, for ,
and also
8.3. The Operators , , and
The operators and are Cartesian, and their actions on the distributions and are uniquely determined. Combining the actions of operators and , we find, using (2), the following formulæ:
and
while for ,
and
and, in particular, for ,
and
Note that the result holds for all . This is no surprise, because it was proved in [6] that, for any signum-radial distribution S, it holds that .
The actions of the Euler operator on the associated signumdistributions are readily obtained using the signum pair of operators
and
while for ,
and
and, in particular, for ,
and
Through the signum pair of operators , the above formulæ for the action of operator on the distributions immediately leads to the following results, which are valid for all :
- ;
- ;
- .
The last formula leads to
Similarly, the action of on the distributions entails the following for all :
- ;
- ;
- .
This last formula leads to
8.4. The Operators , , , and
As was stated in Proposition 1, the angular operators and are Cartesian, and their actions on distributions and on signumdistributions are uniquely determined. As
it holds, for all , that
and through the commutative diagram
![Axioms 14 00533 i011]() we obtain, for all ,
we obtain, for all ,
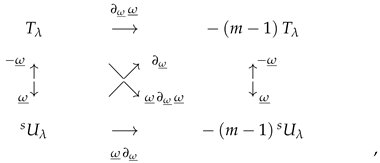
- ;
- .
These results confirm formula (34).
Similarly, for all , it holds that
Through the commutative diagram
![Axioms 14 00533 i012]() it then follows that, for all ,
it then follows that, for all ,
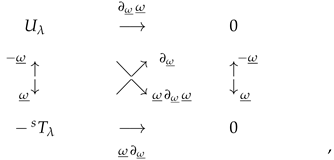
- ;
- .
These results confirm formula (35).
For the actions of the Laplace–Beltrami operator and its signum partner , we now find, for all ,
8.5. The Operators , , and
Division of a distribution by is a Cartesian operation that generally leads to an equivalence class of distributions. However, in view of the results in Section 6, we know that under the action of operators and , only the distribution and the signumdistribution will have a non-unique result. The same holds for , , , and under the action of operator .
We obtain the following formulæ
and
and
and also
For the exceptional case when , we obtain the following results, which are non-unique up to an arbitrary constant c, as
and
By iteration, we find formulæfor the division by as follows:
and
For the exceptional case , we have
whence
For the exceptional case when , we have
whence
The action of the operator components , acting on all and , is uniquely determined, except for . We readily have
Further, for , we have
while for the exceptional case when , it holds that
whence
and
or
and
8.6. The Operators
The multiplication operator is a spherical operator whose actions are uniquely determined (see Definition 4 in Section 5). For all , it holds that
and, through signum association,
It is verified at once that
and
Similarly, we find that
and, through signum association,
By iteration, for all , it follows that
8.7. The Operators , , and
As we know how to divide by the distributions and , we are now ready to compute the actions of the radial and angular parts of the Dirac operator through procedures (3) and (4), respectively. Generally, the results of these actions are equivalence classes of distributions. However, we know from Section 6 that we may expect uniquely determined results, except for distribution and signumdistribution .
First, we address the distributions . For , we find that is uniquely determined by
In view of (7), it follows that
For the exceptional cases we find that the distributions are uniquely determined by
In view of (9), it follows that
In particular, for , we have
and
which are in accordance with (11).
Notice that the formula
thus holds for all .
Through the signum pair of operators and the corresponding commutative diagrams we then obtain the following formulæ.
For , the following hold:
- ;
- ;
- .
For the exceptional values , the following hold:
- ;
- ;
- .
In particular, for , the following hold:
- ;
- ;
- .
Through the signum pair of operators and the corresponding commutative diagrams, we obtain, for all , that
- ;
- ;
- .
Now, let us turn our attention to the distributions .
In the exceptional cases, we find, using (30), for , the unique expressions
and
which are in accordance with (10).
In the particular case where , we find, using (33), the entangled expressions
and
where, as seen in (12), the arbitrary constants and must satisfy the entanglement condition
Remark 7.
It should be noted that, in Section 8.8, we fix a particular choice for constants and satisfying (42), in this way defining both and .
Through the actions of the operators and , it is possible to recover the formulæfor the action of the Laplace operator.
- For , we haveKeeping in mind that , it is confirmed that
- For , we haveconfirming that
- For , we haveandconfirming that
- For , we haveconfirming that
- For , we haveconfirming that
- For , we haveconfirming that
Through the signum pair of operators and the corresponding commutative diagrams, we obtain the following formulæ.
For , the following hold:
- ;
- ;
- .
For the exceptional values , the following hold:
- ;
- ;
- .
On the other hand, for , the following hold:
- ;
- ;
- .
Through the signum pair of operators and the corresponding commutative diagrams, we obtain the following formulæ.
For , the following hold:
- ;
- ;
- .
Equivalently, the following hold:
- ;
- ;
- .
For the exceptional values , the following hold:
- ;
- ;
- .
Equivalently, the following hold:
- .
For the exceptional value , the following hold:
- ;
- ;
- .
Equivalently, the following hold:
- ;
- ;
- .
Note that the formula
is valid for all .
As expected, is the only distribution in the two families of distributions and , , for which the actions of the operators and are not uniquely determined, and a similar observation holds for the signumdistribution . Nothing prevents us from defining these actions by selecting specific values for the arbitrary constants involved. However, to avoid possible inconsistencies, we will, for the moment, not do so and keep the constants and arbitrary but constrained by the entanglement condition (42), viz., . This is made possible by the fact that is expressed as an equivalence class of distributions, viz.,
which is necessary, because fixing here and now a particular value for this arbitrary constant c would lead to the impossible result .
8.8. The Operators and
Combining the results obtained in Section 8.7 for the actions of the radial and angular parts of the Dirac operator, we obtain the action of operator on the distributions and and of the Dirac operator on the signumdistributions and . These results should match with each other through the signum pair of operators . We expect to be the only distribution for which the action is not uniquely determined and the same for the signumdistribution with respect to the action. An overview of the results is now given, recalling, for completeness, some formulæalready obtained in the preceding subsections.
First, we consider the case of the distributions and the associated signumdistributions .
For , it holds that
and
For , it holds that
and
More generally, for , it holds that
and
Now, we treat the case of the distributions and the associated signumdistributions .
For , it holds that
and
For , it holds that
and
For the exceptional case , we find that
and
Apparently, the constant may be chosen freely, whereas constants and must satisfy the entanglement condition (42), which reads as
We now fix these arbitrary constants ourselves, which means that we define , , and . Quite naturally, we have to be very cautious and constantly monitor the concistency. We made the following choices:
Are there any arguments for this particular choice? Concerning the choice of , one can see that, for general , the expressions for and coincide, inspiring the choice . Next, putting in the expression for results in
which can then serve as the definition for , making and . Hence, we have the following definition.
Definition 12.
We define
and
It should be noted that formula (84) matches the corresponding formula for all other values of parameter , that is,
The iteration of operators and yields the following formulæinvolving Laplace and operators. These results should match each other pairwise through the signum pairs of operators and . Based on the results in Section 6, we expect the distributions and to have non-unique results under the action of operator . The same holds for the signumdistributions and under the action of the Laplace operator .
First, we consider the case of the distributions and the associated signumdistributions .
Now, we treat the case of the distributions and the associated signumdistributions .
8.9. The Operators , , , and
In general, the separate actions of the three components of the Laplace operator expressed in spherical coordinates
and of the associated signum operator
are not uniquely determined but are entangled instead. However, for the specific distributions and signumdistributions under consideration, we expect all actions to be uniquely determined except for the distributions and and the associated signumdistributions and .
For general , we find, through direct calculation, that
leading to expressions for and , confirming formulæ (13) and (91), respectively, as well as
leading to expressions for and , confirming formulæ (14) and (99), respectively.
Through signum pairing, see Section 4, we obtain
leading to the expressions for and , confirming formulæ (100) and (21), respectively, as well as
leading to expressions for and , confirming formulæ (92) and (20), respectively.
For , we obtain
However, these expressions are entangled by (19) and (93), which fix the values of the arbitrary constants and as and , eventually leading to
Through the signum pairs of operators , , , and , we then find
confirming (26) and (94), as well as
confirming (25) and (102).
Additionally, we also find
confirming (17) and (95), and, via signum pairing—see Section 4—according to
we confirm (24) and (96).
Via signum pairing, see Section 4, it also holds that
confirming (22) and (98), and
confirming (104) and (23).
Remark 8.
To provide an idea of how computations with signumdistributions are performed in practice, we directly prove formula (90) as follows:
Let be a signumdistributional test function; then,
The first term on the right-hand side equals
while the second term at the right-hand side equals
and the formula follows readily.
9. Cartesian Derivatives of and
In this section, we compute the first- and second- order partial derivatives of the distributions and and their associated signumdistributions and . Recall from Definition 1 that the distributions are scalar-valued, whereas the distributions are (Clifford) vector-valued with scalar components denoted by . As, for all , it holds that , it follows that these components are given by
Naturally, the action of the Cartesian derivatives on all distributions and will be uniquely determined. It follows that the action of the operators on the associated signumdistributions and is uniquely determined as well. Recalling the definition of the operators :
wherein their action on the distributions and will be uniquely determined, except for the distribution . Through signum pairing, the Cartesian derivatives of the associated signumdistributions and will also be uniquely determined, except for .
The actions of the second-order Cartesian derivatives and on the distributions and and of the operators and on the associated signumdistributions and will be uniquely determined. See the expressions
and
wherein the actions of the operators and on the distributions and are uniquely determined except for the distributions and . By signum pairing, the actions of the operators and on the associated signumdistributions and are uniquely determined as well, except for and .
Notice that
and
9.1. The First-Order Partial Derivatives of
Through the signum pair of operators , it follows that
Moreover, a straightforward computation shows that
whence, through the signum pair of operators ,
As a verification, we may now compute , and we obtain
confirming (50).
For the singular values , it holds that
with, recall,
verifying (9) by
and verifying (29) by
In particular, for , we have
verifying (11) by
and verifying (32) by
Hence,
and, in particular, for ,
Moreover, a direct computation shows that
whence
and, in particular, for ,
and so
As a verification of formula (66) we now may compute , and we obtain
since, due to the radial character of , it holds that
9.2. The First-Order Partial Derivatives of
Through the signum pair of operators , it follows that
Moreover, a straightforward computation shows that
whence, through the signum pair of operators ,
We may now compute , and we obtain
confirming (74).
For the action of operator , we expect a non-uniquely determined result. Indeed, a direct computation shows that
where we expect the constant to be determined by (86) and (90). Indeed, by signum pairing this last equation, we obtain that
leading to
For the singular values , it holds that
Note that, by putting in the expression for , the above formula for is recovered. Moreover, formula (10) is verified through
Also, (30) is verified by
By signum pairing, we obtain
Moreover, a direct computation leads to
Note that, by putting in the above expression for , the formula for is recovered. Through signum pairing, see Section 4, we obtain
9.3. Second-Order Partial Derivatives of
Through the signum partners of , , and , it follows that
For the singular values of parameter , that is, , specific computations are necessary.
It follows that
A direct computation shows that
whence also
leading to
But we already found, see (94), that
whence all must be equal to , which eventually leads to
and
It follows that
It follows that
9.4. The Second-Order Partial Derivatives of
It follows at once that
Hence, we also have that
Hence, we also have that
We know that the direct computation of and involves arbitrary constants to be determined through the calculation of . We can circumvent these computations by putting in the expressions for and , obtaining in this way
whence also
which indeed confirms (102).
10. Powers of the Vector Variable
In this section, we will explore the intimate connection between the and distributions on the one hand and powers of the Clifford vector variable on the other.
10.1. Integer Powers of as Regular Distributions and Signumdistributions
The integer powers of the vector variable remain locally integrable in as long as and thus may be interpreted as regular distributions, that is, for all test functions , we have
In particular, for even integer powers , we have
implying that
which clearly are radial regular distributions.
Similarly, for odd integer powers , we find
implying that
which clearly are signum-radial regular distributions.
The associated signumdistributions of these integer powers of are
and
but these signumdistributions are by no means powers of the vector variable .
As to derivation, we have
and the corresponding formulæfor the associated signumdistributions:
We know that locally integrable functions may serve as regular signumdistributions as well. For all test functions , we have
In particular, for even integer powers , we have
implying that
which clearly are radial regular signumdistributions.
Similarly, for odd integer powers , we find
implying that
which clearly are signum-radial regular signumdistributions.
The associated distributions of these integer power signumdistributions are
and
but these distributions are by no means powers of the vector variable .
As to derivation, we have:
and the corresponding formulæ for the associated distributions:
10.2. Integer Powers of as Finite Part Distributions and Signumdistributions
For , the functions are no longer locally integrable in and thus no longer regular (signum)distributions, whence the need for a definition.
Definition 13.
We define the distributions
and the signumdistributions
Note that
and
and observe that none of those four associated (signum)distributions are integer powers of .
Remark 9.
We will retain the notations and even when is locally integrable.
For division by the vector variable , the following formulæ can be easily calculated:
- ;
- ;
- .
10.3. Complex Powers of as Distributions
Through the and distributions, it is possible to define the complex powers of the vector variable as distributions.
Definition 14.
For , we put
Remark 10.
It should be verified that in the particular case where λ is an integer, the distributions introduced above are recovered. Indeed, we have the following:
- For , we get
- For , we get
Now, we investigate the holomorphy of in the complex -plane. Recall that
- is a meromorphic function of showing simple poles at ;
- is a meromorphic function of showing simple poles at .
Thus, it becomes clear that the possible singularities of the distributions depend on the parity of dimension m.
If dimension m is odd, then
and
implying that distribution is an entire function of showing no singularities.
If dimension m is even, then
and
implying that distribution is a meromorphic function of showing simple poles at . However, note that at those singular points, distribution is still defined through monomial pseudofunctions; however, this distribution is not turned into an entire function of .
Now, we compute the Dirac derivative of distribution . We obtain, in general,
Equation (107) is valid in the entire complex -plane when dimension m is odd and valid in when m is even. For the singular values of parameter , we obtain the following results:
- The case .We consider the distributionFor odd dimension m, we do not expect singularities to appear, and we indeed getwithwhenceFor even dimension m, we getwithwhence
- The case .We consider the distributionFor odd dimension m, we do not expect singularities to appear, and we indeed getwithwhenceFor even dimension m, we getwithwhence
- The case .We consider the distributionFor odd dimension m, we do not expect singularities to appear, and we indeed getwithwhenceFor even dimension m, we getwithwhence
- The case .We consider the distributionFor odd dimension m, we do not expect singularities to appear, and we indeed getwithwhenceFor even dimension m, we getwithwhence
We also may compute the action of operator on the complex powers of vector variable . Recall that operator is the Cartesian signum partner operator to the Dirac operator . We obtain, in general,
Equation (108) is valid in the entire complex -plane when dimension m is odd and valid in when m is even. For the singular values of the parameter , we obtain the following expressions.
- Consider the case . For odd dimension m, no singularities will appear, and we indeed find thatwhenceFor even dimension m, we findwhence
- Consider the case . For odd dimension m, no singularities will appear, and we indeed find thatwhenceFor even dimension m, we findwhence
- Consider the case . For odd dimension m, no singularities will appear, and we indeed find thatwhenceFor even dimension m, we findwhence
- Consider the case . For odd dimension m, no singularities will appear, and we indeed find thatwhenceFor even dimension m, we findwhence
10.4. Complex Powers of as Signumdistributions
Similarly as in the preceding subsection, we can define signumdistributions involving complex powers of .
Definition 15.
For , we put
Remark 11.
It has to be verified that for integer values of the complex parameter λ, we recover the signumdistributions already introduced above. We indeed have the following:
- For ,
- For ,
Now, we investigate the holomorphy of in the complex -plane. Recall that
- is a meromorphic function of showing simple poles at ;
- is a meromorphic function of showing simple poles at .
Therefore, it becomes clear that the possible singularities of the signumdistributions depend on the parity of dimension m.
If dimension m is even, then
and
implying that signumdistribution is an entire function of and shows no singularities.
If dimension m is odd, then
and
implying that signumdistribution is a meromorphic function of showing simple poles at . However, note that at those singular points the signumdistribution is still defined through the monomial pseudofunctions; however, this signumdistribution is not turned into an entire function of .
Now, we compute the Dirac derivative of the signumdistribution . In general, we obtain
Equation (109) is valid in the entire complex -plane when dimension m is even, whereas for odd dimension m, it is valid for . For those singular values of the parameter , we obtain the following results.
- Consider the case . For even dimension m, we do not expect singularities to appear, and indeed, we find thatwhenceFor odd dimension m, we findwhence
- Consider the case . For even dimension m, we do not expect singularities to appear, and indeed, we find thatwhenceFor odd dimension m, we findwhence
- Consider the case . For even dimension m, we do not expect singularities to appear, and indeed, we find thatwhenceFor odd dimension m, we findwhence
- Consider the case . For even dimension m, we do not expect singularities to appear, and indeed, we find thatwhenceFor odd dimension m, we findwhence
Finally, we can compute the action of operator on signumdistribution . In general, we obtain
Equation (110) is valid in the entire complex -plane when dimension m is even, whereas for odd dimension m, it is valid for . For those singular values of the parameter , we obtain the following results.
- Consider the case . For even dimension m, we do not expect singularities to appear, and we indeed find thatwhenceFor odd dimension m, we findwhence
- Consider the case . For even dimension m, we do not expect singularities to appear, and we indeed find thatwhenceFor odd dimension m, we findwhence
- Consider the case . For even dimension m, we do not expect singularities to appear, and we indeed find thatwhenceFor odd dimension m, we findwhence
- Consider the case . For even dimension m, we do not expect singularities to appear, and we indeed find thatwhenceFor odd dimension m, we findwhence
11. Physics in Three-Dimensional Euclidean Space
Consider a Euclidean space of arbitrary dimension m. We identify the algebraic vector with the Clifford 1-vector ; see Appendix E. Note that, for two vectors and , it holds that
since, on the one hand, the scalar or inner product of two algebraic vectors is given by , while, on the other hand, the dot product of the corresponding Clifford 1-vectors is given by . In particular, we identify the Dirac operator with the gradient operator , where is an orthonormal basis of . Alternative notations used are for , for , and for . In this section, we discuss some well-known formulæ, used in physics papers, in the Euclidean space . To distinguish the particular three-dimensional case from the arbitrary dimensional case, we will use an arrow in the notation of the algebraic vector in .
11.1. Gravitational Fields
A vector field in is said to be rotation-free (or irrotational) in an open region if it is continuously differentiable in and satisfies
Invoking Stokes’ Theorem, it holds that the line integral of a rotation-free vector field over a closed smooth path in vanishes as
If represents a force field, then the above line integral represents the work done by this field to move an object along the path . For example, this explains why a planet orbits around the sun in the Newtonian gravitational field, which is proportional to
and is rotation-free in and does not cost any energy.
In Clifford algebra notation, this gravitational field takes the form
The irrotationality of in corresponds with
which follows from
which is a scalar expression. It should be noted that in the complement of the origin it holds that
which means that the gravitational field is also divergence-free in .
However, upon inspection of the formulæ obtained in Section 8, it becomes clear that, for all , is a scalar expression, that is,
which implies that all vector fields of the form
are rotation-free in . This is particularly interesting for, e.g., Modified Newtonian Dynamics—or MOND for short—which is an alternative to the dark matter model and aims at explaining the high velocities of stars at the outskirts of galaxies. In this MOND model, it is proposed that, from a certain threshold on in the acceleration, the gravitational field is proportional to
It is clear that, whatever power of the radial distance is used in a gravitational field, it always obeys the zero-energy orbiting principle.
11.2. Coulomb Potential of a Unit Point Charge
In the special case of three-dimensional space, the formulæ (105) and (106) for the second-order Cartesian derivatives of the fundamental solution of the Laplace operator , viz.,
and
turn into
or, in the new notation,
These expressions for the second-order partial derivatives of the Coulomb potential of a unit point charge are well known in physics; see, e.g., [7,8,9]. In [10], it is argued that, with respect to test functions that are not smooth at the origin, the above formulæshould be replaced by
Mathematically speaking, it is not clear what in [10] is meant by ”test functions that are not smooth at the origin“. Nevertheless, considering that the delta distribution and its derivatives are only defined on differentiable test functions, it is readily observed that formulæ (113) and (114) simply coincide with formulæ (111) and (112), as shown in the following results, which hold in arbitrary dimension m.
Lemma 2.
For the delta distribution in , we have the following:
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- ;
- (v)
- ;
- (vi)
- .
Proof.
(i) For any test function and , it holds that
(ii) We have
(iii) It follows from (i) that
(iv) Considering the homogeneity of the delta distribution, it follows from (iii) that
(v) It follows from (iv) and (i) that
(vi) Follows from (iv) and (ii).
□
11.3. A Novel Delta Function Identity
11.4. Electric and Magnetic Dipole Moment
The electric potential induced by the electric dipole moment is given by the scalar or inner product
and the corresponding electric field is
In [8], it was shown that this electric field can be expressed directly in terms of the electric dipole moment as
Our aim was to recover this expression using the formulæ obtained in the present paper. Let be a constant Clifford vector. Then, in general dimension m, it holds that
and as
we have
Putting , we obtain
whence, in the complement of the origin,
confirming that the electric potential is a harmonic scalar field in .
Now, from
it follows that
whence
since
For and in vector notation, we then indeed obtain that
In , the electric field is divergence-free and rotation-free, since it is the gradient field of a harmonic scalar field . Therefore, if we compute the divergence and rotation of as a distribution in , we expect the resulting distributions to be supported at the origin. We can compute both simultaneously by letting, in general dimension m, the Dirac operator act on . We obtain
from which it follows that
or, in dimension 3 and in the language of vector analysis,
showing that the electric field of an electric dipole is rotation-free in the whole space even if it is not differentiable at the origin. Its divergence can also be obtained via
Similarly, if stands for the magnetic dipole moment, the magnetic vector potential is given by
and the corresponding magnetic field is
We now recover the formula, appearing in [8], expressing the magnetic field in terms of the magnetic dipole moment as
First, we observe that
In general dimension m, we have
and, with ,
whence, putting ,
This magnetic field satisfies the Maxwell equation
which would be trivial because is a rotation field, were it not that is not differentiable at the origin. To show that the magnetic field is indeed divergence-free, we act, in general dimension m, with the Dirac operator on
and obtain
from which it follows that
or, in the language of vector analysis in three-dimensional space,
11.5. Some More Delta Function Identities
In [7], a number of identities for the delta distribution are given as corollaries to the computation of integrals of spherical Bessel functions. It is shown that
or, considering that, in general, , and thus, in three-dimensional space , and
We verify these formulæas follows. If , then for the distribution , it holds that
which, for , turns into
If , then we have
which, for , turns into
It is also shown in [7] that
or, considering that, in general, , and thus, in three-dimensional space, , and
We verify these formulæ as follows. If , then
which, for , reduces to
For , we find
which, for , reduces to
11.6. Point Source Fields
The inverse square field is at the heart of the discussion of idealized point sources in a three-dimensional space. In [11], identities are established for partial derivatives of the form
In [12], similar identities are derived from more general formulæ. We show how two of these formulæ, corresponding to and as
may be obtained in the framework of our theory. Firstly, we rewrite them in the language of the underlying paper as
Secondly, it is important to note that in (117) the expression is a distribution. Indeed, for the distribution , it holds that
whence
However, if in (116), is interpreted as a distribution, then the expression becomes a signumdistribution. To obtain the proposed result (116), should be a distribution, whence has to be interpreted as the signumdistribution . It then holds that
is clearly a distribution.
Now, to prove (116), consider, in general dimension m, the signumdistribution for which it holds that
For , we then have
since . It follows that
For , we have
since .
When putting , we obtain, respectively,
and
Formula (117) is proven similarly. If and , then, in general dimension m,
since it is easily seen that . In the particular case when , this formula reduces to
If and , then, in general dimension m,
which, for , reduces to
Finally, if , then, in general dimension m,
which, for , turns into
These considerations show that formulæ such as (116) and (117) should be handled with great care, especially with regard to the distributional or signumdistributional character of negative powers of the radial distance r. In this respect, it holds, more generally, that
is a distribution, while
is a signumdistribution.
12. Conclusions
Expressing distributions in Euclidean space in terms of spherical coordinates inevitably leads to the introduction of so-called signumdistributions. These are bounded linear functionals on a space of indefinitely differentiable test functions showing a non-removable singularity at the origin. There are two types of operators acting on distributions. The Cartesian operators can be expressed using solely Cartesian coordinates. They map distributions to distributions, and their action may be either uniquely determined, as is the case for a number of operators, such as derivation with respect to the Cartesian coordinates, multiplication by analytic functions, the Euler operator, the operator, the Laplace operator, etc., or they may take the form of an equivalence class of distributions, as is the case for a division by analytic functions, for the operators and , for the operators and , etc. The so-called spherical operators map distributions to signumdistributions, and their action may be either uniquely determined, as is the case for the spherical derivatives and , or may result in an equivalence class of signumdistributions, as is the case for division by the spherical distance r. Owing to their homogeneity and (signum-)radial character, the distributions and behave specifically under the action of all those operators in the sense that the results of these actions are all uniquely determined, except for a small number of cases, , , , , , and , which can all be traced back to the non-uniquely determined action . Nevertheless, we were able to uniquely determine the aforementioned actions while conserving overall consistency. Crucial to obtaining this result is the possibility to have a free choice of the arbitrary constant in equivalence class , the non-uniquely determined character of which should be maintained.
Funding
This research received no external funding.
Data Availability Statement
There are no data to be shared for this article.
Acknowledgments
The author is indebted to the referees for their rigorous reading of the manuscript and their valuable suggestions.
Conflicts of Interest
The author declares that no conflicts of interest exist.
Appendix A. The Distribution Fp on the Real Line
Consider the space of so-called test functions on , i.e., indefinitely differentiable functions with compact support , equipped with the following topology. A sequence of test functions is said to converge to a test function in if there exists a compact set such that , for all , and , when , for all orders of derivation k. Note that there are several, albeit equivalent, topologies on possible.
A real or complex distribution T on the real line is a continuous linear functional on , or, in other words, an element of the dual space . Denoting the action of a linear functional T on a test function by
for T to be a continuous linear functional on , it must hold that whenever .
An important property of distributions is that a distribution is indefinitely continuously differentiable, with the basic definition of derivation being
Any locally integrable function may be interpreted as a so-called regular distribution by putting, for all test functions ,
A well-known, and non-regular, distribution is the Dirac delta distribution defined by
An example of a regular distribution is the Heaviside step function , given by
It holds that
Now, let be a complex parameter and x a real variable. We consider the function
where is the function
with and being the real and imaginary parts of , respectively.
If , then is a locally integrable function, and hence, a regular distribution is given for all test functions as
As a function of , the distribution is holomorphic in the half-plane .
For , the function is no longer locally integrable. One introduces the so-called finite part distribution by defining, for and all ,
Note that for , the defining expression (A1) for reduces to that for , and, by analytic continuation, becomes holomorphic in . Its singularities are simple poles with residues
It is still possible to define for through the so-called monomial pseudofunctions, but it should be emphasized that through this additional definition, no entire function of is obtained. One puts, for all ,
In the following sequence of lemmata, we summarize the most important properties of the finite part distribution. For the proofs, we refer to, e.g., [13].
Lemma A1.
The distribution obeys the following multiplication rules:
- ;
- ;
- .
Lemma A2.
The distribution obeys the following differentiation rules:
- ;
- ;
- .
Lemma A3.
If the test function is such that , then we have the following:
- ;
- .
Note that distribution theory is generalized to arbitrary dimensions in a straightforward manner. It suffices to state that the standard space of test functions is the space of scalar-valued infinitely differentiable functions with compact support. A distribution T is a continuous linear functional on , i.e., a linear functional satisfying the condition that, for any compact set and for any sequence of test functions with compact support contained in K for which all sequences converge uniformly to zero on K for all multi-indices , it holds that the corresponding sequences converge to zero in . The space of distributions is denoted by . A standard reference text for distribution theory in Euclidean space, including numerous examples, is [13].
Appendix B. The Distributions Tλ and Uλ in
Let be a complex parameter, let , let Fp be the finite part distribution on the real r-axis defined by the monomial pseudofunctions for , and let be a scalar test function in . We then define the following two families of distributions in .
Definition A1.
For , we put
and
where the spherical means and are defined by
and
In view of the holomorphy properties of the one-dimensional distribution Fp , function is expected to be a priori a meromorphic function of the complex parameter with simple poles at , or , with residues given by
As the spherical mean has vanishing odd-order derivatives at the origin , it follows that the singularities of at the points are removable. This should be confirmed by coinciding expressions for in the vertical strips and , as wel as a matching value at the removable singularity . Using the shorthand notation for the spherical mean , we have the following:
- If or , then
- If or , then
- If or , then
We may conclude that distribution is a meromorphic function of complex parameter showing simple poles at , where there is an ad hoc definition through the monomial pseudofunctions. Let us now compute the residue at these singularities. We obtain
whence
Similarly, we eventually find that distribution is a meromorphic function of complex parameter showing simple poles at , where there is an ad hoc definition through the monomial pseudofunctions. For the residue at these singularities, we have
whence
However, there is a second option to cope with these singularities: removing the singularities by dividing the distributions and by an appropriate Gamma function. This gives rise to the so-called normalized distributions and . Their definitions are as follows.
The normalized distributions are defined by
The normalized distributions are defined by
The normalized distributions and turn out to be holomorphic mappings from to space of the tempered distributions. They are intertwined by the actions of the multiplication operator and the Dirac operator according to the following formulæ. For all , we have the following:
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- ;
- (v)
- ;
- (vi)
- ; .
Therein, in property (iv), the following definition of the Fourier transformation is adopted:
For an in-depth study of the normalized distributions and , we refer to [14]. Additionally, we can investigate the behavior of the and distributions under the action of operators and .
Proposition A1.
We have the following:
- (i)
- for all ;
- (ii)
- for all except for .
Proof.
(i) For , we have the following:
(i’) For , we have the following:
(ii) For , we have the following:
(ii’) For , we have the following:
□
Remark A1.
Up to a constant, distribution equals distribution , which is a locally integrable function. We know that equals an equivalence class of distributions, viz.,
which, clearly, owing to the appearance of , does not belong to the family of distributions. This is the reason why we have omitted the case in the above proposition.
A straightforward computation leads to the following result.
Proposition A2.
We have the following:
- (i)
- for all ;
- (ii)
- for all except for .
Proof.
(i) Because is a radial distribution, for all , we have that
(ii) For we have:
(ii’) For we have:
□
Similarly, signumdistributions and may now be normalized. Recall that shows simple poles at , whereas shows simple poles at . We define
and
Lemma A4.
For all , we have that
and
Proposition A3.
For all , we have that
and
Proof.
Obviously, these results are obtained by simple transition to the associated signumdistributions of the corresponding formulæfor distributions and , with the multiplication operator being a signum self-adjoint operator. However, we provide a direct proof in what follows:
- (i)
- For , we have .
- (ii)
- (iii)
- For , we have .
- (iv)
- .
□
Proposition A4.
For all , we have that
and
Proof.
These results are obtained from the corresponding formulæ for distributions and , with the operator being the signum adjoint operator of the Dirac operator . □
Similarly, the results of Propositions A1 and A2 lead to the following formulæ.
Proposition A5.
- (i)
- For , we haveand .
- (ii)
- For all , we haveand .
Appendix C. Spherical Means
Let be a scalar test function in . Introduce spherical coordinates and denote by the area of the unit sphere .
Definition A2.
The spherical means and are defined by
and
The spherical mean is a classical concept. It is a scalar function of the radial distance r for which
It can be defined for through even extension.
The spherical mean is a Clifford vector-valued function for which
It can be defined for through odd extension.
Further properties of the spherical means are listed in the following sequence of lemmata; see also [15].
Lemma A5.
We have
and
Lemma A6.
We have
and
Lemma A7.
We have
and
Lemma A8.
We have
with
Lemma A9.
We have
Appendix D. Some Specific Distributions
In this appendix, we provide an overview of the properties of some specific distributions of the and families.
- We havewhence is the regular distribution associated with constant function . Its properties are trivial.
- We havewhence is the regular distribution associated with function , which is the higher-dimensional counterpart to the signum distribution on the real line. Its properties are as follows:
- -
- ;
- -
- , which splits up into and ;
- -
- ;
- -
- ;
- -
- and ;
- -
- and ;
- -
- and ;
- -
- ;
- -
- ;
- -
- .
- We havewhence is the regular distribution associated with the locally integrable function in . Its properties are the following:
- -
- ;
- -
- , which splits up intoand ;
- -
- , which expresses the fact that is the fundamental solution of the Laplace operator
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- .
- We havewhence is the regular distribution associated with the locally integrable function in . Its properties are the following:
- -
- ;
- -
- , which splits up into and ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- .
- We havewhence is the regular distribution associated with the locally integrable function in . Its properties are the following:
- -
- ;
- -
- , which splits up intoand and expresses the fact that is the fundamental solution of the Dirac operator ;
- -
- ;
- -
- ;
- -
- ;
- -
- and ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- .
- We haveIts properties are the following:
- -
- ;
- -
- , which splits up intoand ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- .
- We havewhencewhich is the higher-dimensional analogue of the principal value distribution Pv on the real line. It is, up to a constant, the convolution kernel of the Hilbert transform, given, for a suitable function or distribution f, byIts properties are the following:
- -
- or ;
- -
- , which splits up into and;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- .
- We haveThe scalar distribution is, up to a constant, the convolution kernel for the so-called square root of the negative Laplacian, which, for an appropriate function or distribution f, is defined byIts properties are the following:
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- ;
- -
- .
As it holds that , orit becomes clear that the convolution kernel of the operator is precisely the convolution kernel of the so-called Hilbert-Dirac operator , whence
Appendix E. Clifford Algebra and Clifford Analysis
Let be an orthonormal basis of Euclidean space . A non-commutative product, often termed a Clifford product or geometric product, is introduced, which is governed by the rules
Note, in particular, that
and
The real, associative, but non-commutative, Clifford algebra then is generated additively by the elements , where , with and .
The real Clifford algebra , which has dimension , may be decomposed as the direct sum of subspaces as
where is isomorphic to the space of real numbers spanned by , is the space of 1-vectors—isomorphic to the space of algebraic vectors spanned by all — is the space of bivectors spanned by all products , (), is the space of trivectors, and, finally, is the space of pseudoscalars spanned by .
We identify the algebraic vector with the Clifford 1-vector . Applying the above multiplication rules, we obtain for the Clifford product of two vectors and as
The scalar part of this product is called the dot product of the vectors and denoted by . The dot product is commutative and coincides, up to a minus sign, with the traditional inner product of vectors in .
The bivector part of this product is called the wedge product of the vectors and denoted by . The wedge product is anti-commutative.
Note, in particular, that
and
The Clifford algebras are not division algebras. However, division by 1-vectors is always possible, with the inverse of being .
Clifford algebra generalizes to higher dimensions the algebra of complex numbers, which is isomorphic with the Clifford algebra , and the algebra of real quaternions, which is isomorphic with the Clifford algebra . For more on Clifford algebras, we refer to [16].
Clifford analysis is the theory of functions defined in Euclidean space , taking values in the Clifford algebra which are monogenic in an open region . Monogenicity is defined through the action of the Dirac operator
where () is an orthonormal basis of 1-vectors in , as was already introduced above. The Dirac operator may be seen as a Stein–Weiss projection of the gradient operator in vector analysis (see, e.g., [17]). Its most important property is that, similarly to the Cauchy–Riemann operator in the complex plane, it linearizes the Laplace operator in as
Definition A3.
A function is monogenic in the open region if it satisfies the system of linear equations
in Ω.
References
- Brackx, F.; De Knock, B.; De Schepper, H.; Eelbode, D. A Calculus scheme for Clifford Distributions. Tokyo J. Math. 2006, 29, 495–513. [Google Scholar] [CrossRef]
- Schwartz, L. Théorie des Distributions; Hermann: Paris, France, 1966. [Google Scholar]
- Brackx, F.; Sommen, F.; Vindas, J. On the radial derivative of the delta distribution. Complex Anal. Oper. Theory 2017, 11, 1035–1057. [Google Scholar] [CrossRef]
- Brackx, F. Calculus for the Delta Distribution. Contemp. Math. 2024, 5, 5238–5327. [Google Scholar] [CrossRef]
- Brackx, F. Radial and Angular Derivatives of Distributions. In Topics in Clifford Analysis. Trends in Mathematics; Bernstein, S., Ed.; Birkhäuser: Cham, Switzerland, 2019; pp. 141–171. [Google Scholar]
- Brackx, F. Distributions: A spherical co-ordinates approach. arXiv 2018, arXiv:1801.07393. [Google Scholar]
- Adkins, G.S. Three-dimensional Fourier transforms, integrals of spherical Bessel functions, and novel delta function identities. Bull. Allahabad Math. Soc. 2008, 31, 215–246. [Google Scholar]
- Frahm, C.P. Some novel delta-function identities. Am. J. Phys. 1983, 51, 826–829. [Google Scholar] [CrossRef]
- Hnidzo, V. Generalized second-order partial derivatives of 1/r. Eur. J. Phys. 2011, 32, 287–297. [Google Scholar]
- Franklin, J. Comment on “Some novel delta-function identities”. Am. J. Phys. 2010, 78, 1225–1226. [Google Scholar] [CrossRef]
- Bowen, J.M. Delta function terms arising from classical point-source fields. Am. J. Phys. 1994, 62, 511–515. [Google Scholar]
- Estrada, R.; Kanwal, R.P. The appearance of nonclassical terms in the analysis of point-source fields. Am. J. Phys. 1995, 63, 278. [Google Scholar] [CrossRef]
- Kanwal, R.P. Generalized Functions: Theory and Applications, 3rd ed.; Springer Science + Business Media: New York, NY, USA, 2004. [Google Scholar]
- Brackx, F.; De Schepper, H. On The Fourier Transform of Distributions and Differential Operators in Clifford Analysis. Complex Var. Theory Appl. 2004, 49, 1079–1091. [Google Scholar] [CrossRef]
- Brackx, F.; Delanghe, R.; Sommen, F. Clifford Analysis; Pitman Publishers: Boston, MA, USA; London, UK; Melbourne, Australia, 1982. [Google Scholar]
- Porteous, I. Clifford Algebras and the Classical Groups; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Stein, E.M.; Weiss, G. Generalization of the Cauchy-Riemann equations and representations of the rotation group. Amer. J. Math. 1968, 90, 163–196. [Google Scholar] [CrossRef]
- Delanghe, R.; Sommen, F.; Souček, V. Clifford Algebra and Spinor-Valued Functions: A Function Theory for the Dirac Operator; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Gürlebeck, K.; Habetha, K.; Sprössig, W. Holomorphic Functions in the Plane and n-Dimensional Space; Translated from the 2006 German Original; Birkhäuser Verlag: Basel, Switzerland, 2008. [Google Scholar]

{kind=link}
Table 1.
Signum pairs of operators.
Table 2.
Cross pairs of operators.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Brackx, F. Clifford Distributions Revisited. Axioms 2025, 14, 533. https://doi.org/10.3390/axioms14070533
AMA Style
Brackx F. Clifford Distributions Revisited. Axioms. 2025; 14(7):533. https://doi.org/10.3390/axioms14070533
Chicago/Turabian StyleBrackx, Fred. 2025. "Clifford Distributions Revisited" Axioms 14, no. 7: 533. https://doi.org/10.3390/axioms14070533
APA StyleBrackx, F. (2025). Clifford Distributions Revisited. Axioms, 14(7), 533. https://doi.org/10.3390/axioms14070533
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.