
Analyzing Dynamical Behaviors of a Stochastic Competitive Model with a Holling Type-II Functional Response Under Diffusion and the Ornstein–Uhlenbeck Process

Abstract
1. Introduction
2. The th Moment of the Solution in Model (5)
3. Asymptotic Stability of
4. Stationary Distribution
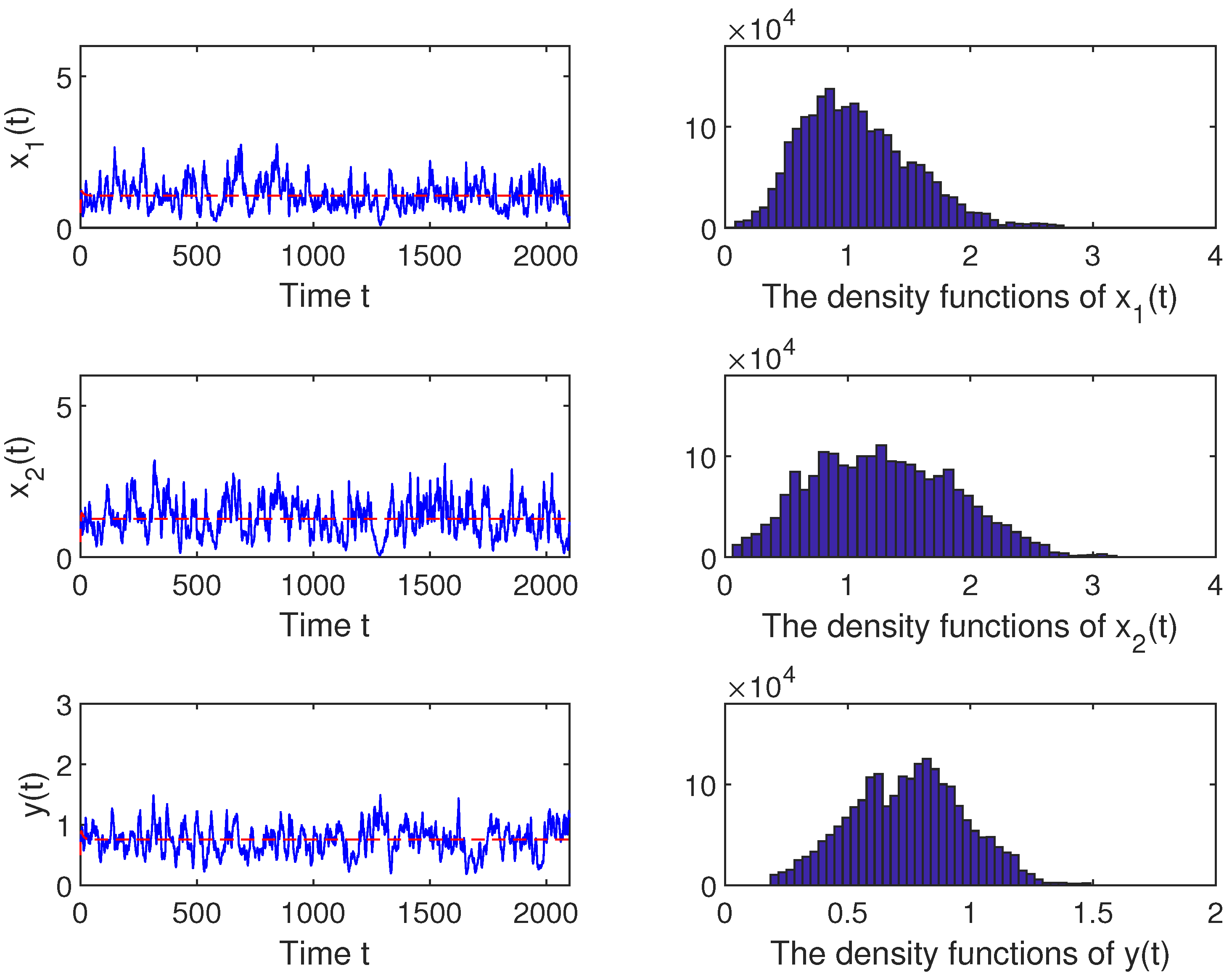
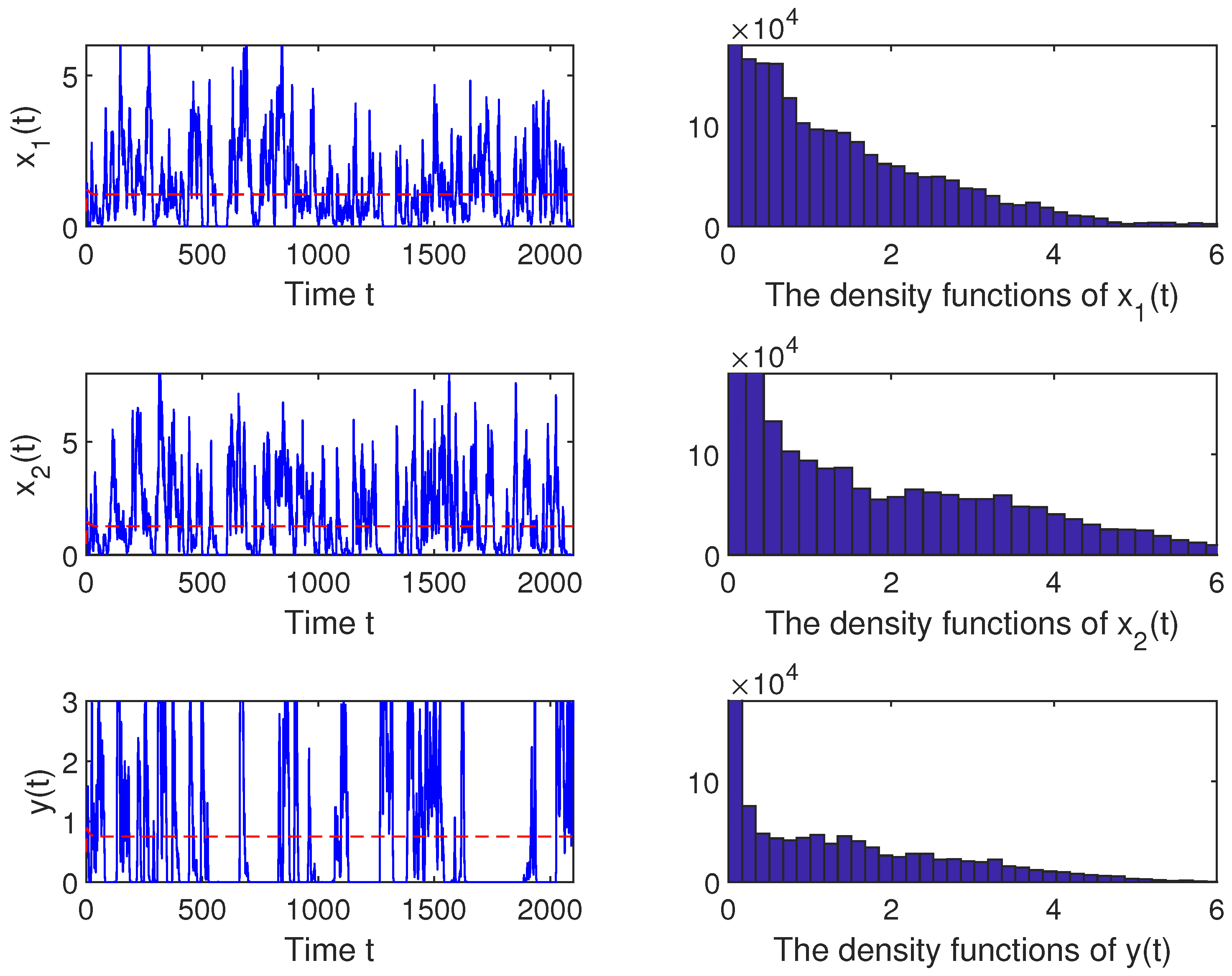
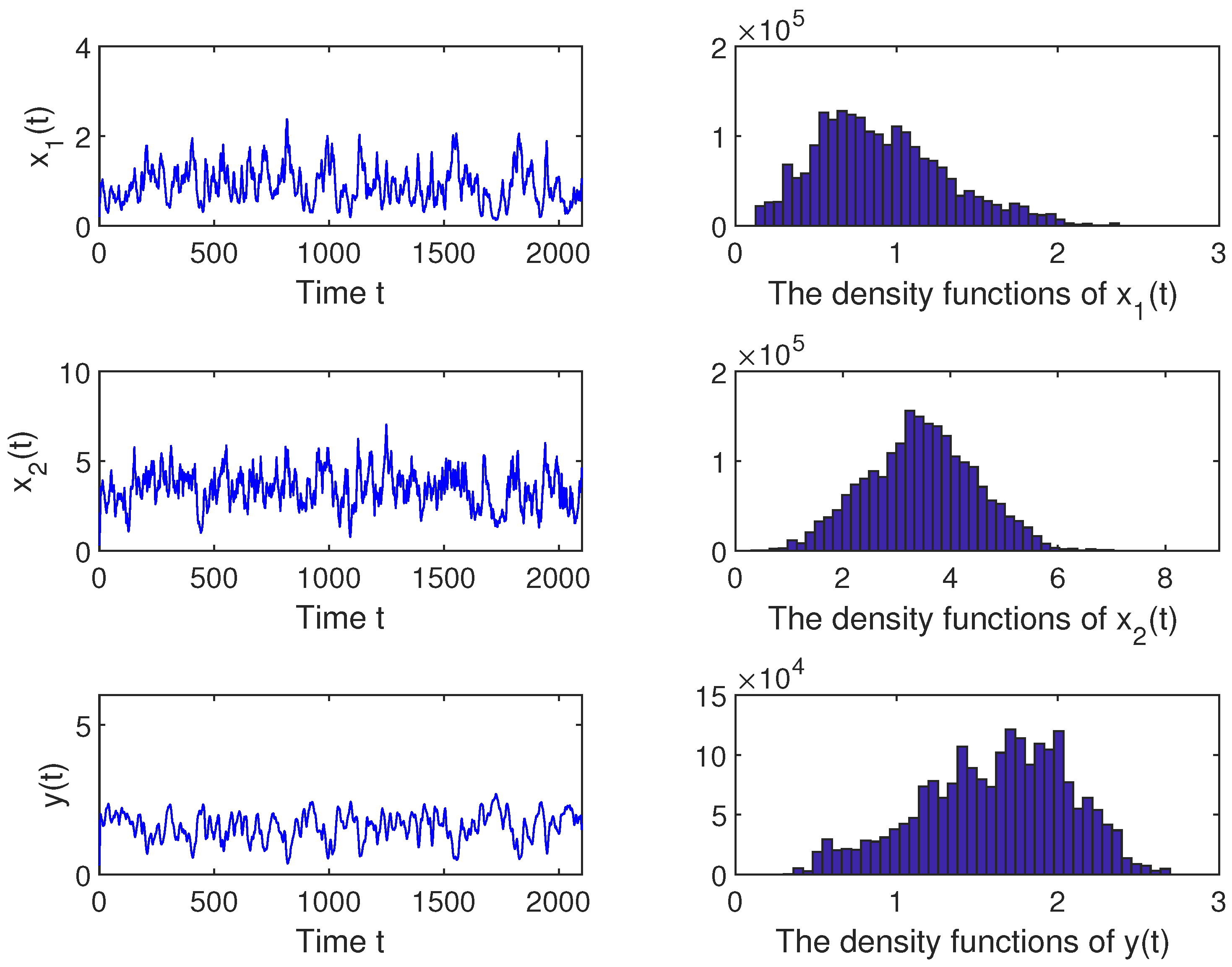
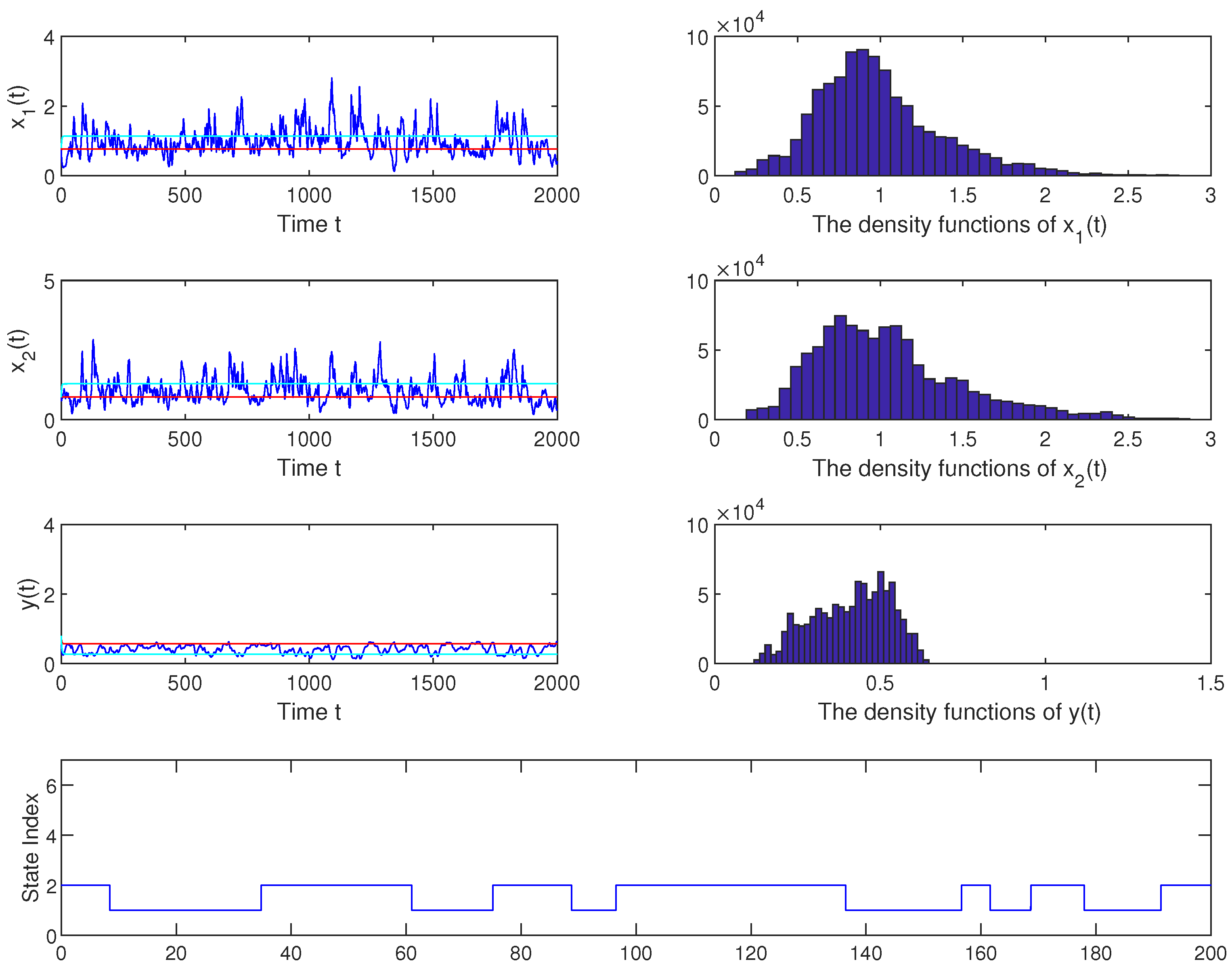
5. Numerical Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lotka, A.J. Undamped oscillations derived from the law of mass action. J. Am. Chem. Soc. 1920, 42, 1595–1599. [Google Scholar] [CrossRef]
- Volterra, V. Variazioni e Fluttuazioni del Numero d’Individui in Specie Animali Conviventi; Societá Anonima Tipografica “Leonardo da Vinci”: Rome, Italy, 1927; Volume 2. [Google Scholar]
- Wu, S.; Wang, Y.; Geng, D. Dynamic and pattern formation of a diffusive predator-prey model with indirect prey-taxis and indirect predator-taxis. Nonlinear Anal. Real World Appl. 2025, 84, 104299. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, L.; Chen, X.D. Persistence and global stability for two-species nonautonomous competition Lotka-Volterra patch-system with time delay. Nonlinear Anal. Real World Appl. 1999, 37, 1019–1028. [Google Scholar] [CrossRef]
- Lotka, A.J. Elements of Physical Biology; Williams & Wilkins: Philadelphia, PA, USA, 1925. [Google Scholar]
- Ji, C.; Jiang, D.; Shi, N. Analysis of a predator-prey model with modified Leslie-Gower and Holling-type II schemes with stochastic perturbation. J. Math. Anal. Appl. 2009, 359, 482–498. [Google Scholar] [CrossRef]
- Danane, J.; Yavuz, M.; Yıldız, M. Stochastic modeling of three-species Prey-Predator model driven by Lévy Jump with Mixed Holling-II and Beddington-DeAngelis functional responses. Fractal Fract. 2023, 7, 751. [Google Scholar] [CrossRef]
- Alnafisah, Y.; El-Shahed, M. Deterministic and Stochastic Prey-Predator Model for Three Predators and a Single Prey. Axioms 2022, 11, 156. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, Q. Asymptotic stability of a stochastic Lotka-Volterra competition model with dispersion and Ornstein-Uhlenbeck process. Appl. Math. Lett. 2024, 157, 109163. [Google Scholar] [CrossRef]
- Nguyen, D.H.; Yin, G. Coexistence and exclusion of stochastic competitive Lotka-Volterra models. J. Differ. Equ. 2017, 262, 1192–1225. [Google Scholar] [CrossRef]
- Hening, A.; Nguyen, D.H. Coexistence and extinction for stochastic Kolmogorov systems. Ann. Appl. Probab. 2018, 28, 1893–1942. [Google Scholar] [CrossRef]
- Su, T.; Kao, Y.; Jiang, D. Dynamical behaviors of a stochastic SIR epidemic model with reaction-diffusion and spatially heterogeneous transmission rate. Chaos Solitons Fractals 2025, 195, 116283. [Google Scholar] [CrossRef]
- Mohd, M.H.; Murray, R.; Plank, M.J.; Godsoe, W. Effects of dispersal and stochasticity on the presence-absence of multiple species. Ecol. Model. 2016, 342, 49–59. [Google Scholar] [CrossRef]
- Ji, W.; Zhang, Y.; Liu, M. Dynamical bifurcation and explicit stationary density of a stochastic population model with Allee effects. Appl. Math. Lett. 2021, 111, 106662. [Google Scholar] [CrossRef]
- Maller, R.A.; Müller, G.; Szimayer, A. Ornstein-Uhlenbeck processes and extensions. In Handbook of Financial Time Series; Springer: Berlin/Heidelberg, Germany, 2009; pp. 421–437. [Google Scholar]
- Wu, S.; Yuan, S.; Lan, G.; Zhang, T. Understanding the dynamics of hepatitis B transmission: A stochastic model with vaccination and Ornstein-Uhlenbeck process. Appl. Math. Comput. 2024, 476, 128766. [Google Scholar] [CrossRef]
- Allen, E. Environmental variability and mean-reverting processes. Discrete Contin. Dyn. Syst. Ser. B. 2016, 21, 2073–2089. [Google Scholar] [CrossRef]
- Zhou, Y.; Jiang, D. Dynamical behavior of a stochastic SIQR epidemic model with Ornstein-Uhlenbeck process and standard incidence rate after dimensionality reduction. Commun. Nonlinear Sci. Numer. Simul. 2023, 116, 106878. [Google Scholar] [CrossRef]
- Wang, H.; Zuo, W.; Jiang, D. Dynamical analysis of a stochastic epidemic HBV model with log-normal Ornstein-Uhlenbeck process and vertical transmission term. Chaos Solitons Fractals 2023, 177, 114235. [Google Scholar] [CrossRef]
- Su, X.; Zhang, X.; Jiang, D. Dynamics of a stochastic HBV infection model with general incidence rate, cell-to-cell transmission, immune response and Ornstein-Uhlenbeck process. Chaos Solitons Fractals 2024, 186, 115208. [Google Scholar] [CrossRef]
- Rudnicki, R.; Pichór, K. Influence of stochastic perturbation on prey-predator systems. Math. Biosci. 2007, 206, 108–119. [Google Scholar] [CrossRef]
- Mao, X. Stochastic Differential Equations and Applications; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Mao, X.; Sabanis, S.; Renshaw, E. Asymptotic behaviour of the stochastic Lotka-Volterra model. J. Math. Anal. Appl. 2003, 287, 141–156. [Google Scholar] [CrossRef]
- Valenti, D.; Giuffrida, A.; Denaro, G.; Pizzolato, N.; Curcio, L.; Mazzola, S.; Basilone, G. Noise induced phenomena in the dynamics of two competing species. Math. Model. Nat. Phenom. 2016, 11, 74. [Google Scholar] [CrossRef]
- Xia, Y.; Yuan, S. Survival analysis of a stochastic predator-prey model with prey refuge and fear effect. J. Biol. Dyn. 2020, 14, 871–892. [Google Scholar] [CrossRef] [PubMed]
- Mondal, S.; Samanta, G.P. Impact of fear on a predator-prey system with prey-dependent search rate in deterministic and stochastic environment. Nonlinear Dyn. 2021, 104, 2931–2959. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, S.; Chen, S. A stochastic predator-prey eco-epidemiological model with the fear effect. Appl. Math. Lett. 2022, 134, 108300. [Google Scholar] [CrossRef]
- Mondal, B.; Ghosh, U.; Sarkar, S.; Tiwari, P.K. A generalist predator-prey system with the effects of fear and refuge in deterministic and stochastic environments. Math. Comput. Simul. 2024, 225, 968–991. [Google Scholar] [CrossRef]
- Liu, M.; Wang, K. Global stability of a nonlinear stochastic predator-prey system with Beddington-DeAngelis functional response. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1114–1121. [Google Scholar] [CrossRef]
- Zhou, B.; Jiang, D.; Hayat, T. Analysis of a stochastic population model with mean-reverting Ornstein-Uhlenbeck process and Allee effects. Commun. Nonlinear Sci. Numer. Simul. 2022, 111, 106450. [Google Scholar] [CrossRef]
- Rudnicki, R. Long-time behaviour of a stochastic prey-predator model. Stoch. Processes Their Appl. 2003, 108, 93–107. [Google Scholar] [CrossRef]
- Zhou, B.; Jiang, D.; Han, B.; Hayat, T. Threshold dynamics and density function of a stochastic epidemic model with media coverage and mean-reverting Ornstein-Uhlenbeck process. Math. Comput. Simul. 2022, 196, 15–44. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D. Periodic solution and stationary distribution of stochastic predator-prey models with higher-order perturbation. J. Nonlinear Sci. 2018, 28, 423–442. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, X.; Jiang, D. Dynamical behaviors of a stochastic food chain system with Ornstein-Uhlenbeck process. J. Nonlinear Sci. 2022, 32, 34. [Google Scholar] [CrossRef]
- Ge, J.; Ji, W.; Liu, M. Threshold behavior of a stochastic predator-prey model with fear effect and regime-switching. Appl. Math. Lett. 2025, 164, 109476. [Google Scholar] [CrossRef]
- Hieu, N.T.; Nguyen, D.H.; Nguyen, N.N.; Yin, G. Analyzing a class of stochastic SIRS models under imperfect vaccination. J. Frankl. Inst. 2024, 361, 1284–1302. [Google Scholar] [CrossRef]
- Yang, A.; Wang, H.; Yuan, S. Tipping time in a stochastic Leslie predator-prey model. Chaos Solitons Fractals 2023, 171, 113439. [Google Scholar] [CrossRef]
- Blanchini, F.; Miani, S. A new class of universal Lyapunov functions for the control of uncertain linear systems. IEEE Trans. Autom. Control 2002, 44, 641–647. [Google Scholar] [CrossRef]
- Han, B.; Jiang, D. Global dynamics of a stochastic smoking epidemic model driven by Black-Karasinski process. Appl. Math. Lett. 2025, 160, 109324. [Google Scholar] [CrossRef]
- Mu, X.; Jiang, D. Dynamics caused by the mean-reverting Ornstein-Uhlenbeck process in a stochastic predator-prey model with stage structure. Chaos Solitons Fractals 2024, 179, 114445. [Google Scholar] [CrossRef]
- Roozen, H. An asymptotic solution to a two-dimensional exit problem arising in population dynamics. SIAM J. Appl. Math. 1989, 49, 1793–1810. [Google Scholar] [CrossRef]
- Ji, C.; Jiang, D. Dynamics of a stochastic density dependent predator-prey system with Beddington-DeAngelis functional response. J. Math. Anal. Appl. 2011, 381, 441–453. [Google Scholar] [CrossRef]
- Ma, C.; Zhang, X.; Yuan, R. Dynamic analysis of a stochastic regime-switching Lotka-Volterra competitive system with distributed delays and Ornstein-Uhlenbeck process. Chaos Solitons Fractals 2025, 190, 115765. [Google Scholar] [CrossRef]
- Khasminskii, R. Stochastic Stability of Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 66. [Google Scholar]
- Higham, D.J. An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 2001, 43, 525–546. [Google Scholar] [CrossRef]
- Li, X.; Liu, Q. Asymptotical stability of a stochastic SIQRS epidemic model with log-normal Ornstein-Uhlenbeck process. Appl. Math. Lett. 2025, 166, 109551. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Lu, C.; Meng, X. Analyzing Dynamical Behaviors of a Stochastic Competitive Model with a Holling Type-II Functional Response Under Diffusion and the Ornstein–Uhlenbeck Process. Axioms 2025, 14, 443. https://doi.org/10.3390/axioms14060443
Yang D, Lu C, Meng X. Analyzing Dynamical Behaviors of a Stochastic Competitive Model with a Holling Type-II Functional Response Under Diffusion and the Ornstein–Uhlenbeck Process. Axioms. 2025; 14(6):443. https://doi.org/10.3390/axioms14060443
Chicago/Turabian StyleYang, Di, Chun Lu, and Xiangcun Meng. 2025. "Analyzing Dynamical Behaviors of a Stochastic Competitive Model with a Holling Type-II Functional Response Under Diffusion and the Ornstein–Uhlenbeck Process" Axioms 14, no. 6: 443. https://doi.org/10.3390/axioms14060443
APA StyleYang, D., Lu, C., & Meng, X. (2025). Analyzing Dynamical Behaviors of a Stochastic Competitive Model with a Holling Type-II Functional Response Under Diffusion and the Ornstein–Uhlenbeck Process. Axioms, 14(6), 443. https://doi.org/10.3390/axioms14060443